
A Review of Intelligent Unmanned Mining Current Situation and Development Trend

 , ,
, , 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. The Development History of Unmanned Mining Technology
3. Present Situation of Intelligent Unmanned Mining in China
4. Basic Theory
4.1. Definition of Intelligent Unmanned Mining
4.2. Multi-Source Heterogeneous Data Model
4.3. Transparent Geological Prediction Model
5. Key Technologies for Intelligent Unmanned Mining
5.1. Shearer’s Memory Cutting Technology
5.2. Intelligent Control Technology of Hydraulic Support
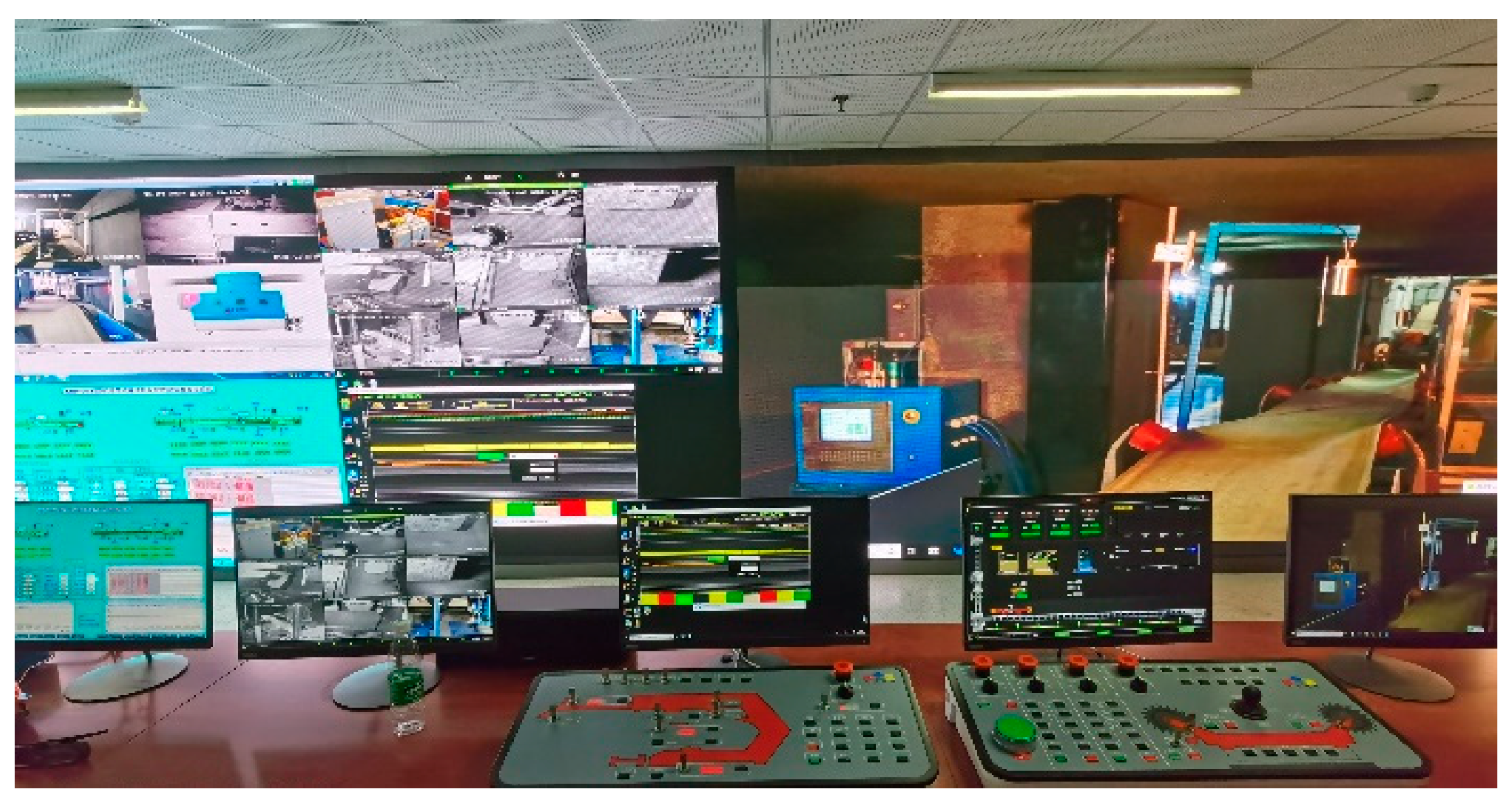
5.3. Centralized Control Technology of Fully-Mechanized Mining Equipment
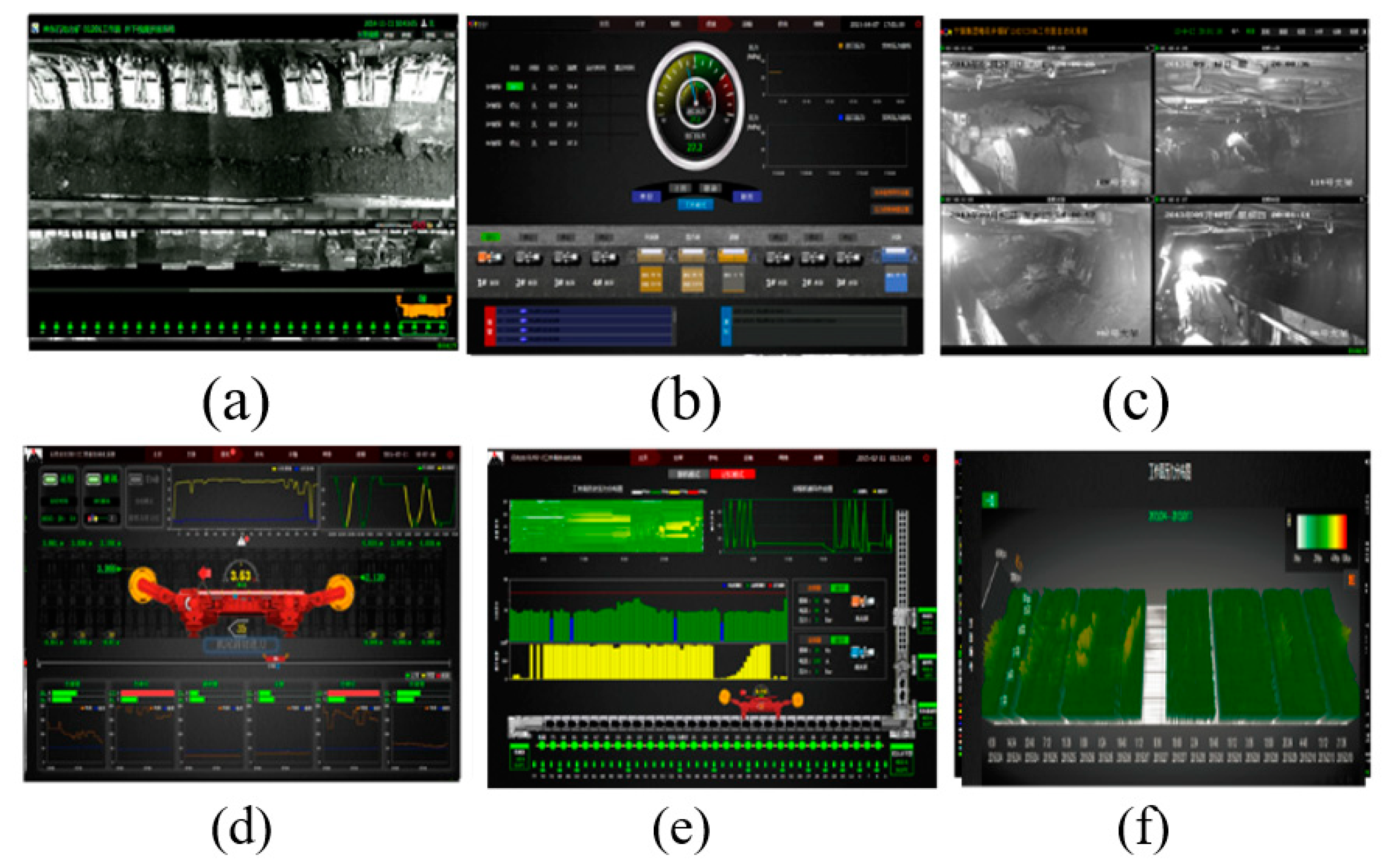
5.4. Intelligent Video Surveillance Technology
5.5. Coal Mine Robot Technology
6. Intelligent Unmanned Mining Technology Mode
6.1. Fully-Mechanized Mining Equipment Automation and Remote Visualized Intervention
6.2. Intelligent Adaptive Mining Technology Mode
6.3. Theory and Technology of Intelligent Unmanned Mining Overall Design System
7. Problems with Intelligent Unmanned Mining
- (1)
- Intelligent fully-mechanized mining equipment. Although China has realized the localization of most of the fully-mechanized mining equipment in the intelligent working face, the intelligent fully-mechanized mining equipment still has problems such as poor reliability, low perception accuracy and poor coordination. At the same time, the sensor technology of fully-mechanized mining equipment also needs further development. Although new optical fiber sensors and MEMS sensors [62] have higher measurement accuracy, are lower in cost, have more functions and easier realization of intelligence than traditional sensors, they are limited by the complex underground environment of coal mines, and multiple functions are still unable to be realized.
- (2)
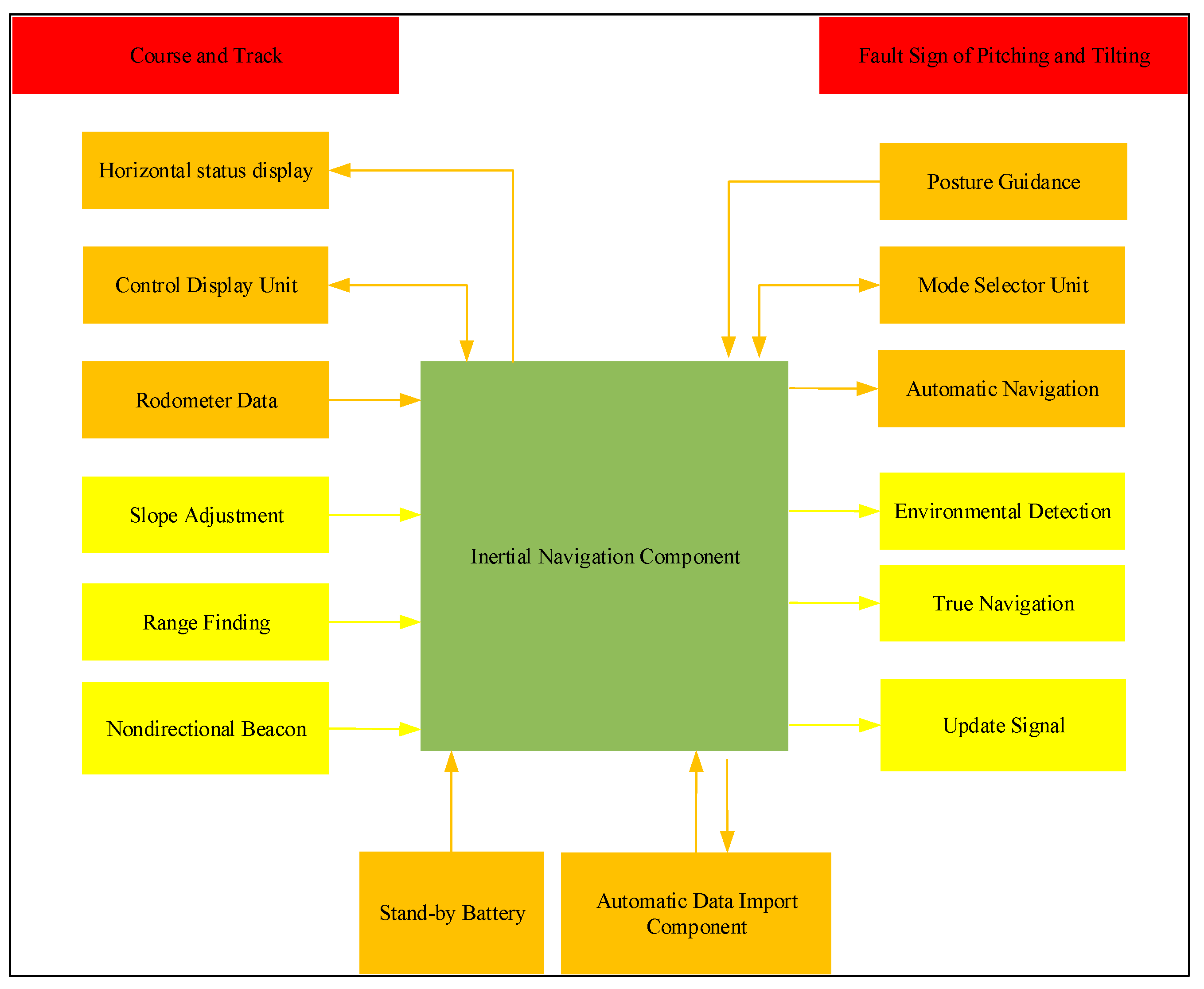
- The key technology of intelligent unmanned mining needs further development. This includes large-section roadway deformation intelligent control technology, intelligent technology of roadheaders, intelligent technology of bolt support [63], intelligent technology of transportation system, intelligent technology of video monitoring, inertial navigation technology [64] and geological exploration technology, etc.
- (3)
- The degree of intelligence is low. Due to the limitation of technology and equipment, the intellectualization degree of unmanned mining technology in coal mines is relatively low at present, which is mainly due to the contradiction between the static control system and the dynamic application environment.
- (4)
- Government policy. The current relevant laws and policies are mostly instructive policies and are not compulsory. There are many local policies and the differences between different provinces are large. Different local policies have led to the uneven development of coal mine intelligence in each province and city in China. The research hotspots of coal mine intelligence are different, which is not conducive to the healthy development of China’s coal industry.
- (5)
- Talent reserve. At present, there are very few schools in Chinese universities that offer smart mining, there is lack of relevant teaching materials, and a lack of a comprehensive new talent training model.
8. Prospects for the Development of Intelligent Unmanned Mining
- (1)
- Intelligent automation technology. Intelligent automation technology, including shearer memory cutting technology and intelligent automatic rapid tunneling technology, needs further innovation and development. It is necessary to increase investment and research on intelligent mining technology, and promote the development of shearers in the direction of intelligent perception, intelligent planning and autonomous cutting. Moreover, there is a need to increase the research and development of the full-section rectangular rapid roadheader, and improve the technical level of intelligent automatic rapid roadheading in coal mines.
- (2)
- Intelligent control technology. Through the application of 5G, inertial navigation, gigabit industrial Ethernet technology and monitoring technology in the key technologies of intelligent unmanned mining in coal mines, the operation accuracy and application distance of intelligent control are improved, and the reaction time and control error of intelligent control are reduced. Intelligent control technology that realizes fast control and precise control is required
- (3)
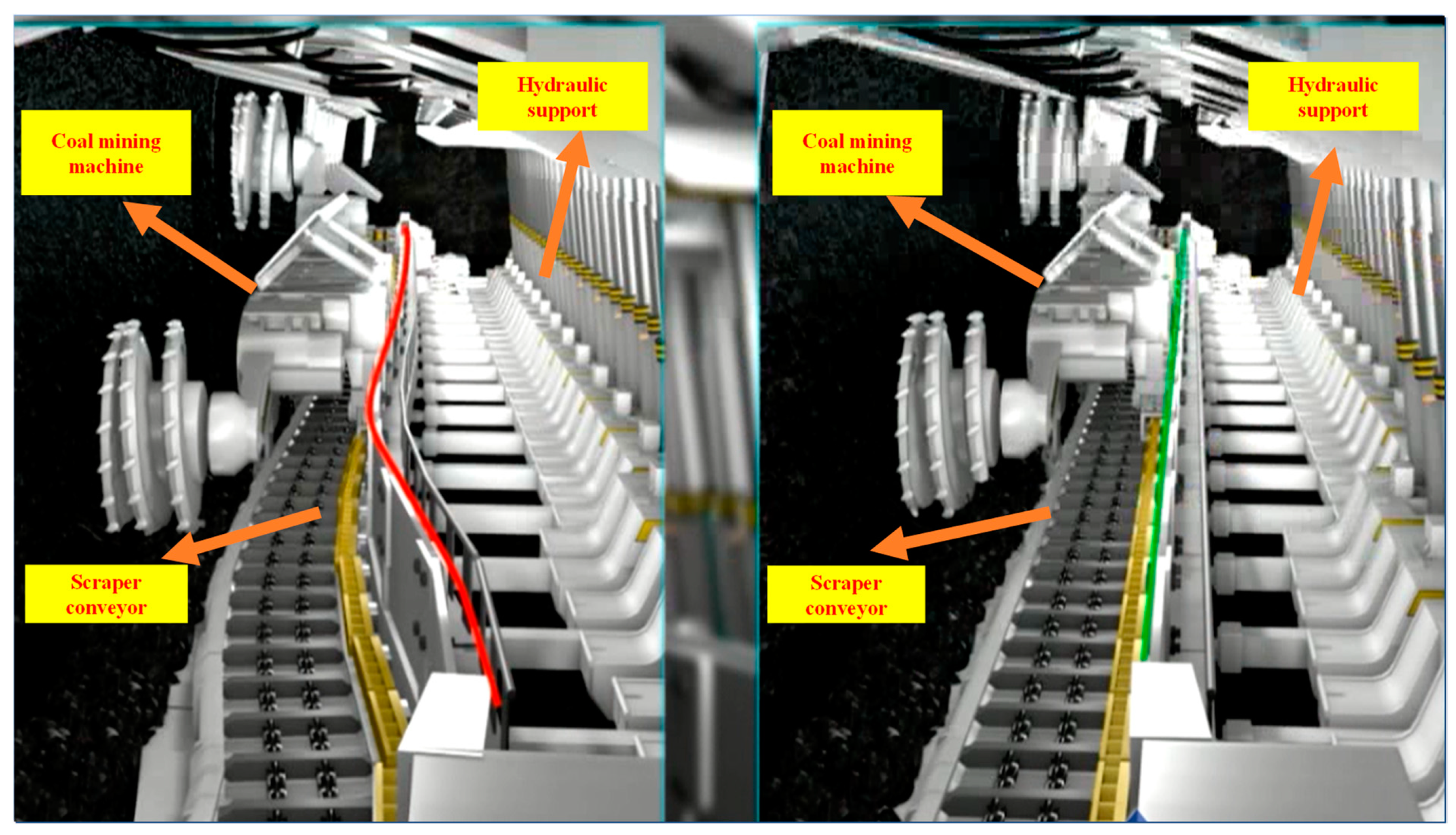
- Intelligent monitoring technology. Through continuous improvement of communication quality, data transmission speed, camera resolution and monitoring system stability, in-depth study of high-definition imaging of intelligent working faces based on thermal imaging technology can be conducted, to achieve comprehensive monitoring of coal mining machines, scraper conveyors, hydraulic supports, etc., for real-time tracking of mining equipment.
- (4)
- Other smart technologies. The existing underground coal mine robots are still unable to perform complex underground operations due to technological and technical limitations. In the future, coal mine robots should have multi-joint manipulators like industrial robots, which can achieve multiple degrees of freedom and can complete various complex underground operations. At the same time, we should vigorously develop coal mine intelligent rapid excavation robots and coal mine intelligent detection and disaster relief robots.
9. Conclusions
- (1)
- By studying the development history of my country’s intelligent unmanned mining technology, the definition of intelligent unmanned mining is given. It introduces, in detail, the fundamental role of multi-source heterogeneous data models and geological prediction models in the field of intelligent unmanned mining.
- (2)
- Some key technologies of intelligent unmanned mining are introduced, and three major problems in intelligent unmanned mining are given. Including the poor reliability of intelligent fully-mechanized mining equipment, low perception accuracy, and poor coordination, the key technologies of intelligent unmanned mining need to be further developed and the degree of intelligence of unmanned mining technology in coal mines is relatively low.
- (3)
- Aiming at the deficiencies of the key technologies of intelligent unmanned systems, the intelligent automation technology, intelligent control technology, intelligent monitoring technology and other intelligent technologies are prospected, and it is hoped that China’s intelligent unmanned mining technology will flourish.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wang, G.F.; Pang, Y.H.; Ren, H.W. Intelligent coal mining pattern and technological path. J. Min. Strat. Control. Eng. 2020, 2, 5–19. [Google Scholar]
- Ge, S.R.; Hao, S.Q.; Zhang, S.H.; Zhang, X.F.; Zhang, L.; Wang, S.B.; Wang, Z.B.; Bao, J.S.; Yang, X.L.; Yang, J.J. Status of intelligent coal mining technology and potential key technologies in China. Coal Sci. Technol. 2020, 48, 28–46. [Google Scholar]
- Fan, J.D.; Yan, Z.G.; Li, C. Exploration of intelligent coal mining key technology based on 5G technology. Coal Sci. Technol. 2020, 48, 92–97. [Google Scholar]
- Guidance on Accelerating the Intelligent Development of Coal Mines. China Coal Daily, 5 March 2020.
- Wang, G.F.; Zhao, G.R.; Ren, H.W. Analysis of key core technologies of intelligent coal mining and intelligent mining. Coal J. 2019, 44, 34–41. [Google Scholar]
- Guo, C.; Yang, Z.; Chang, S.; Ren, T.; Yao, W. Precise Identification of Coal Thickness by Channel Wave Based on a Hybrid Algorithm. Appl. Sci. 2019, 9, 1493. [Google Scholar] [CrossRef] [Green Version]
- Wang, T.; Jie, J.; Lin, Z.Y.; Fang, H.M.; Wang, Y.; Liu, Y.F. Coordinated Exploration Model and its Application to Coal and Coal-associated Deposits in Coal Basins of China. Acta Geol. Sin. 2021, 95, 1346–1356. [Google Scholar] [CrossRef]
- Hao, Y.; Wu, Y.; Ranjith, P.G.; Zhang, K.; Zhang, H.Q.; Chen, Y.L.; Li, M.; Li, P. New insights on ground control in intelligent mining with Internet of Things. Comput. Commun. 2020, 150, 788–798. [Google Scholar] [CrossRef]
- Li, J.; Zhan, K. Intelligent Mining Technology for an Underground Metal Mine Based on Unmanned Equipment. Engineering 2018, 4, 381–391. [Google Scholar] [CrossRef]
- Wang, G.F.; Xu, Y.X.; Ren, H.W. Intelligent and ecological coal mining as well as clean utilization technology in China: Review and prospects. Int. J. Min. Sci. Technol. 2019, 29, 161–169. [Google Scholar] [CrossRef]
- Wang, G.F.; Liu, F.; Pang, Y.H.; Ren, H.W.; Ma, Y. Intelligent coal mine—Core technology support for high-quality development of coal industry. J. Coal 2019, 44, 349–357. [Google Scholar] [CrossRef]
- Xie, H.P.; Wang, J.H.; Wang, G.F.; Ren, H.W.; Liu, J.Z.; Ge, S.R.; Zhou, H.W.; Wu, G.; Ren, S.H. The new concept of coal revolution and the concept of coal science and technology development. J. Coal 2018, 43, 1187–1197. [Google Scholar]
- Cheng, G.M.; Huang, K.; Wang, S.J. Spiral drilling technology and its development. Min. Metall. Eng. 2003, 23, 4–6. [Google Scholar]
- Zhao, L.J.; He, J.Q.; Li, F.Q. Numerical simulation of coal plow cutting process. J. China Coal Soc. 2012, 37, 878–883. [Google Scholar]
- Basarir, H.; Oge, I.F.; Aydin, O. Prediction of the stresses around main and tail gates during top coal caving by 3D numerical analysis. Int. J. Rock Mech. Min. Sci. 2015, 76, 88–97. [Google Scholar] [CrossRef]
- Massinaei, M.; Jahedsaravani, A.; Taheri, E.; Khalilpour, J. Machine vision based monitoring and analysis of a coal column flotation circuit. Powder Technol. 2019, 343, 330–341. [Google Scholar] [CrossRef]
- Wang, J.; Huang, Z. The recent technological development of intelligent mining in China. Engineering 2017, 3, 439–444. [Google Scholar] [CrossRef]
- Li, L.G.; Sun, D.Y.; Han, G.G.; Li, X.B.; Hu, Q.C.; Shu, L. Velocity-free Localization of Autonomous Driverless Vehicles in Underground Intelligent Mines. IEEE Trans. Veh. Technol. 2020, 69, 9292–9303. [Google Scholar]
- Zhang, K.X.; Li, S.B.; He, M.C.; Ning, Y.; Zhang, L.; Huang, Z.H. Study on key technologies of intelligent unmanned coal mining series Ⅰ: Study on diagonal adjustment control technology of intelligent fully—Mechanized coal mining face. Coal Sci. Technol. 2018, 46, 139–149. [Google Scholar]
- Wang, G.F.; Wang, H.; Ren, H.W.; Zhao, G.R.; Pang, Y.H.; Du, Y.B.; Zhang, J.H.; Hou, G. The 2025 scenario goal and development path of smart coal mine. Coal J. 2018, 43, 295–305. [Google Scholar]
- Wang, G.F.; Du, Y.B. Development direction of intelligent coal mine and intelligent mining technology. Coal Sci. Technol. 2019, 47, 1–10. [Google Scholar]
- Li, S.B. Progress and development trend of intelligent mining technology. Coal Sci. Technol. 2019, 47, 102–110. [Google Scholar] [CrossRef]
- Fan, J.D. Research on key technologies of intelligent fully mechanized mining on working face with large mining height. Ind. Mine Autom. 2018, 44, 363–371. [Google Scholar]
- Zhang, K.X. Study on intelligent mining technology of fully-mechanized heading face. Coal Sci. Technol. 2017, 45, 106–111. [Google Scholar]
- Zhang, K.X.; Wang, X.L.; He, M.C.; Yin, S.X.; Li, S.B.; Sun, J.D.; Li, D.; Cheng, Z.H.; Zhao, Q.F.; Yin, S.F.; et al. Research on multi-level fuzzy comprehensive evaluation of the applicability of intelligent unmanned mining face. J. Min. Strat. Control. Eng. 2021, 3, 47–56. [Google Scholar]
- Huang, Z.H.; Wang, F.; Zhang, S.X. Research on the architecture and key technologies of intelligent coal mining system. J. China Coal Soc. 2020, 45, 1959–1972. [Google Scholar]
- Wang, C.F.; Rong, Y. Concept, architecture and key technologies for transparent longwall face. Coal Sci. Technol. 2019, 47, 156–163. [Google Scholar] [CrossRef]
- Wang, J.H.; Huang, L.T.; Li, S.B.; Huang, Z.H. Development of intelligent technology and equipment in fully-mechanized coal mining face. J. China Coal Soc. 2014, 39, 1418–1423. [Google Scholar]
- Yuan, J.H.; Luo, X.G.; Li, Y.; Hu, X.Q.; Chen, W.C.; Zhang, Y. Multi criteria decision-making for distributed energy system based on multi-source heterogeneous data. Energy 2022, 239, 122250. [Google Scholar] [CrossRef]
- Yuan, J.H.; Luo, X.G.; Li, Z.D.; Li, L.F.; Ji, P.L.; Zhou, Q.; Zhang, Z.L. Sustainable development evaluation on wind power compressed air energy storage projects based on multi-source heterogeneous data. Renew. Energy 2021, 169, 1175–1189. [Google Scholar] [CrossRef]
- Zhang, K.X.; Xu, L.X.; Li, X.; Mao, M.C.; Fu, D.L.; Zhang, Y.L.; Kang, L.; Wang, X.L. Research on big data analysis and decision-making method and system of intelligent mining in transparent working face. Coal Sci. Technol. 2021. Available online: https://kns.cnki.net/kcms/detail/detail.aspx?dbcode=CAPJ&dbname=CAPJLAST&filename=MTKJ20211202000&uniplatform=NZKPT&v=hhPV5LJlyhYeSh63RHRJvvfZbtlJmfedlYCjk6UnM0DXLk34DviH7kQrFQHuadZ4 (accessed on 5 December 2021).
- Gao, M.; Hao, H.; Xue, S.; Lu, T.; Cui, P.; Gao, Y.; Xie, J.; Yang, B.; Xie, H. Discing behavior and mechanism of cores extracted from Songke-2 well at depths below 4500 m. Int. J. Rock Mech. Min. Sci. 2022, 149, 104976. [Google Scholar]
- Gao, M.; Xie, J.; Gao, Y.; Wang, W.; Li, C.; Yang, B.; Liu, J.; Xie, H. Mechanical behavior of coal under different mining rates: A case study from laboratory experiments to field testing. Int. J. Min. Sci. Technol. 2021, 31, 825–841. [Google Scholar] [CrossRef]
- Gao, M.Z.; Zhang, Z.L.; Yin, X.G.; Xu, C.; Liu, Q.; Chen, H.L. The location optimum and permeability-enhancing effect of a low-level shield rock roadway. Rock Mech. Rock Eng. 2018, 51, 2935–2948. [Google Scholar] [CrossRef]
- Notice on Soliciting Opinions on 4 China Coal Industry Association Group Standards including “Code for Design of Coal Mining Faces Based on Dynamic Geological Model and Independent Planning Mining”. China Coal Assoc. Sci. Technol. Lett. 2021. Available online: http://www.coalchina.org.cn/index.php?m=content&c=index&a=show&catid=61&id=132805 (accessed on 5 December 2021).
- Dong, L.G.; Tong, X.J.; Ma, J. Quantitative Investigation of Tomographic Effects in Abnormal Regions of Complex Structures. Engineering 2020, 7, 1011–1022. [Google Scholar] [CrossRef]
- Dong, L.G.; Tong, X.J.; Hu, Q.C.; Tao, Q. Empty region identification method and experimental verification for the two-dimensional complex structure. Int. J. Rock Mech. Min. Sci. 2021, 147, 104885. [Google Scholar] [CrossRef]
- Dong, L.G.; Hu, Q.C.; Tong, X.J.; Liu, Y.F. Velocity-Free MS/AE Source Location Method for Three-Dimensional Hole-Containing Structures. Engineering 2020, 6, 827–834. [Google Scholar] [CrossRef]
- Cao, B.F.; Luo, X.R.; Zhang, L.K.; Lei, Y.H.; Zhou, J.S. Petrofacies prediction and 3-D geological model in tight gas sandstone reservoirs by integration of well logs and geostatistical modeling. Mar. Pet. Geol. 2020, 114, 104202. [Google Scholar] [CrossRef]
- Zhang, K.X.; Yang, H.J.; He, M.C.; Sun, J.D.; Li, D.; Cheng, Z.H.; Zhao, Q.F.; Yin, S.X.; Kang, L.; Wang, X.L.; et al. Comprehensive evaluation of intelligent fully mechanized mining face based on grey relational analysis. Mod. Tunn. Technol. 2021. Available online: http://kns.cnki.net/kcms/detail/51.1600.U.20210831.1317.004.html (accessed on 5 December 2021).
- Li, S.B. Present situation and prospect on intelligent unmanned mining at work face. China Coal 2019, 45, 5–12. [Google Scholar]
- Liu, C.S.; Chen, J.G. Mathematic Model of Memory Cutting for Coal Shearer Based on Single Demo Knife. Coal Sci. Technol. 2011, 39, 71–73. [Google Scholar]
- Fan, Q.G.; Li, W.; Wang, Y.Q.; Fan, M.B.; Yang, X.F. A memory cutting algorithm for shearer using grey Markov combination model. J. Cent. South Univ. 2011, 42, 3054–3058. [Google Scholar]
- Zhang, L.L.; Tan, C.; Wang, Z.B.; Yang, X.F.; Mi, J.P. Memory cutting path optimization of shearer based on genetic algorithm. Coal Eng. 2011, 23, 111–113. [Google Scholar]
- Zhang, L.L.; Tan, C.; Wang, Z.B.; Mi, J.P.; Zhu, W.C. Mining machine memory cutting path optimization based on particle swarm optimization algorithm. Coal Sci. Technol. 2010, 38, 69–71. [Google Scholar]
- Ren, H.W.; Meng, X.G.; Li, Z.; Li, M.Z. Study on key technology of intelligent control system applied in 8 m large mining height fully-mechanized face. Coal Sci. Technol. 2017, 45, 37–44. [Google Scholar]
- Huang, Z.H.; Miao, J.J. The application research of equipment centralized control technology in fully mechanized mining face. Coal Sci. Technol. 2013, 41, 14–17. [Google Scholar]
- Song, D.Y.; Song, J.C.; Tian, M.Q.; Xu, C.Y.; Song, X.; Li, X.S. Development and application of electro-hydraulic control technology of hydraulic support in fully mechanized coal mining face. J. Taiyuan Univ. Technol. 2018, 49, 240–251. [Google Scholar]
- Liu, Z.R.; Liu, J. The application of automation technology in fully mechanized mining face. Inn. Mong. Coal Econ. 2018, 265, 7–12. [Google Scholar]
- Chen, G.P. The application of intelligent analysis and early warning technology in video surveillance system. Coal Mine Mach. 2014, 35, 172–173. [Google Scholar]
- Cheng, D.Q.; Qian, J.S. Digital video surveillance server and its key technologies. Coal Sci. Technol. 2004, 32, 43–46. [Google Scholar]
- Yang, X.J.; Wang, R.F.; Wang, H.F.; Yang, Y.K. A novel method for measuring pose of hydraulic supports relative to inspection robot using LiDAR. Measurement 2020, 154, 107452. [Google Scholar] [CrossRef]
- Song, R.; Zheng, Y.K.; Liu, Y.X.; Ma, X.; Li, Y.B. Application and prospect analysis of bionic robot technology in coal mine. J. Coal 2020, 45, 2155–2169. [Google Scholar]
- Huang, L.T.; Huang, Z.H.; Zhang, K.X. Key Technology of Mining in Intelligent Fully Mechanized Coal Mining Face with Large Mining Height. Coal Min. 2016, 21, 1–6. [Google Scholar]
- Huang, Z.H.; Nan, T.F.; Zhang, K.X.; Feng, Y.H. Design on intelligent control platform of mechanized mining robot based on Ethernet/IP. Coal Sci. Technol. 2017, 45, 9–15. [Google Scholar]
- Tian, C.J. Research of intelligentized coal mining mode and key technologies. Ind. Mine Autom. 2016, 42, 28–32. [Google Scholar]
- Wang, G.F.; Du, Y.B.; Ren, H.W.; Fan, J.D.; Wu, Q.Y. Top level design and practice of smart coal mines. J. China Coal Soc. 2020, 45, 1909–1924. [Google Scholar]
- Li, C.H.; Mao, S.J.; Jiang, Y.F. Design and Implementation of Mine Virtual Platform and Electromechanical Monitoring and Measuring Application. Coal Sci. Technol. 2011, 39, 94–99. [Google Scholar]
- Zoubir, O.; Doulkifli, B.; Omar, B.; Rachid, C. AuMixDw: Towards an automated hybrid approach for building XML data warehouses. Data Knowl. Eng. 2019, 120, 60–82. [Google Scholar]
- Zeng, L.Y.; Liu, S.Q.; Erhan, K.; Paul, C.; Mahmoud, M. A comprehensive interdisciplinary review of mine supply chain management. Resour. Policy 2021, 74, 102274. [Google Scholar] [CrossRef]
- Song, Z.Q.; Chen, L.L.; Wang, C.Q.; Liu, X.G. Understanding of safe mining conditions for fully mechanized top coal caving. J. China Coal Soc. 1995, 18, 356–360. [Google Scholar]
- Rao, K.; Liu, H.F.; Wei, X.L.; Wu, W.J.; Hu, C.Y.; Fan, J.; Liu, J.Q.; Tu, L.C. A high-resolution area-change-based capacitive MEMS tilt sensor. Sens. Actuators A Phys. 2020, 313, 112191. [Google Scholar] [CrossRef]
- Gao, M.Z.; Xie, J.; Guo, J.; Lu, Y.Q.; He, Z.Q.; Li, C. Fractal evolution and connectivity characteristics of mining-induced crack networks in coal masses at different depths. Geomech. Geophys. Geo-Energy Geo-Resour. 2021, 7, 9. [Google Scholar] [CrossRef]
- Wang, Z.H.; Cheng, X.H. Adaptive Optimization Online IMU Self-Calibration Method for Visual-Inertial Navigation System. Measurement 2021, 180, 109478. [Google Scholar] [CrossRef]




Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, K.; Kang, L.; Chen, X.; He, M.; Zhu, C.; Li, D. A Review of Intelligent Unmanned Mining Current Situation and Development Trend. Energies 2022, 15, 513. https://doi.org/10.3390/en15020513
Zhang K, Kang L, Chen X, He M, Zhu C, Li D. A Review of Intelligent Unmanned Mining Current Situation and Development Trend. Energies. 2022; 15(2):513. https://doi.org/10.3390/en15020513
Chicago/Turabian StyleZhang, Kexue, Lei Kang, Xuexi Chen, Manchao He, Chun Zhu, and Dong Li. 2022. "A Review of Intelligent Unmanned Mining Current Situation and Development Trend" Energies 15, no. 2: 513. https://doi.org/10.3390/en15020513
APA StyleZhang, K., Kang, L., Chen, X., He, M., Zhu, C., & Li, D. (2022). A Review of Intelligent Unmanned Mining Current Situation and Development Trend. Energies, 15(2), 513. https://doi.org/10.3390/en15020513