
An Improved Virtual Inertia Control Strategy for Low Voltage AC Microgrids with Hybrid Energy Storage Systems

 ,
,  , and
, and
Abstract
:1. Introduction
- (1)
- A new VIC strategy that takes the amplitude instead of the frequency of the converter is proposed and applied to the SC converter in the HESS. This strategy is proper for low-voltage P-V droop-controlled microgrids. The VIC can effectively mitigate the AC bus voltage fluctuation during the load power changing period. Moreover, the battery output power varying is also alleviated so that the lifecycle of it can be prolonged.
- (2)
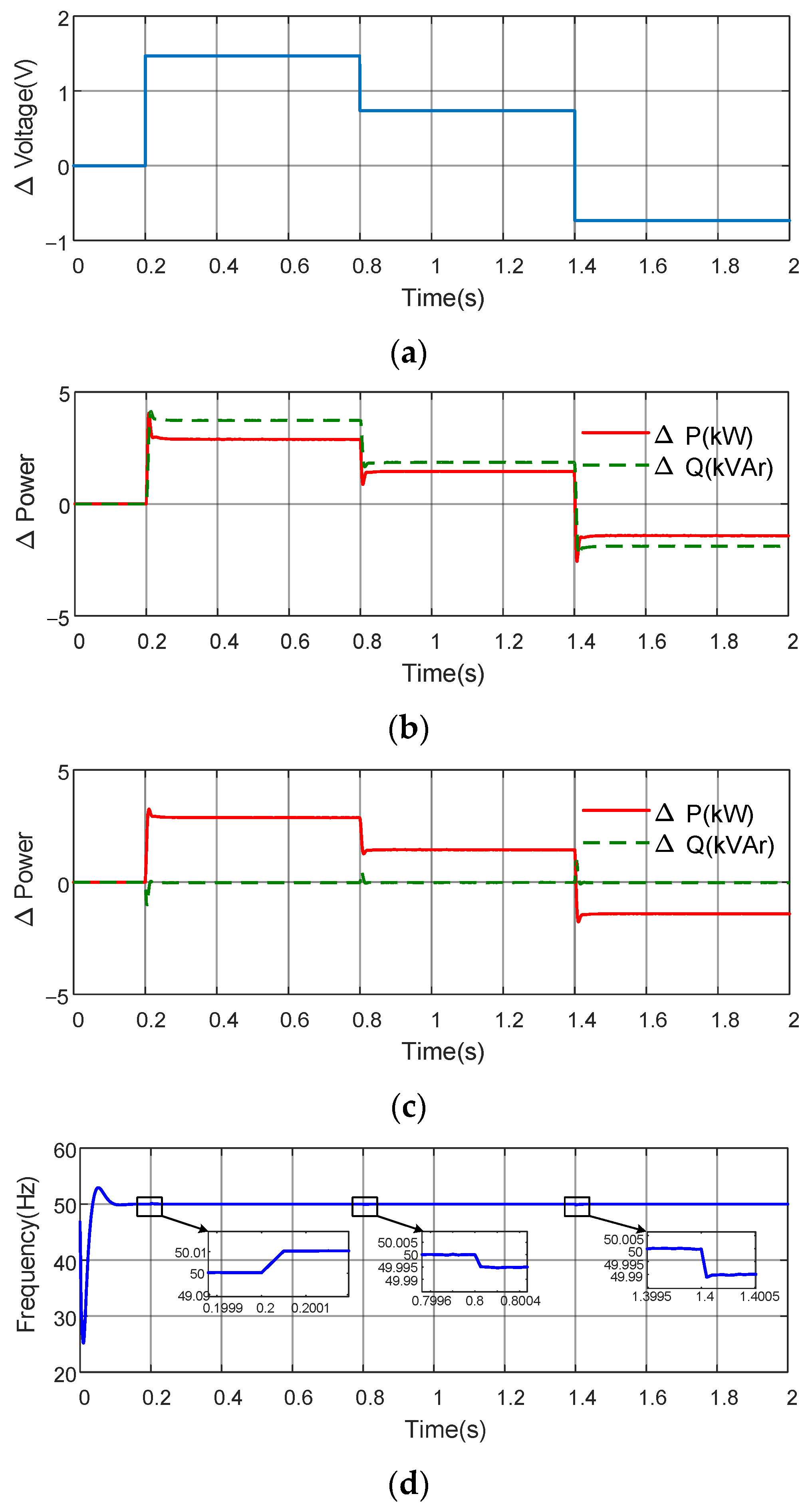
- Considering a more general situation, the network impedance of microgrids has both resistive and inductive components. The voltage amplitude control of VSC will cause the active and reactive power to vary in the meantime. The coupling of active power and reactive power, caused by line impedance, is addressed with a feedforward decoupling control method. The proposed scheme can realize the complete decoupling of active and reactive power control, facilitating the application of the P-V droop strategy and VIC in the microgrid.
- (3)
- The dynamic power splitting of the HESS is realized. With the proposed strategy, the SC, with fast response dynamics, only provides transit power to fast fluctuation, while the battery, with a slow response time, gives consistent power support.
- (4)
- The proposed VIC does not influence AC bus frequency. The frequency remains at its rated value, improving the power quality in the microgrid.
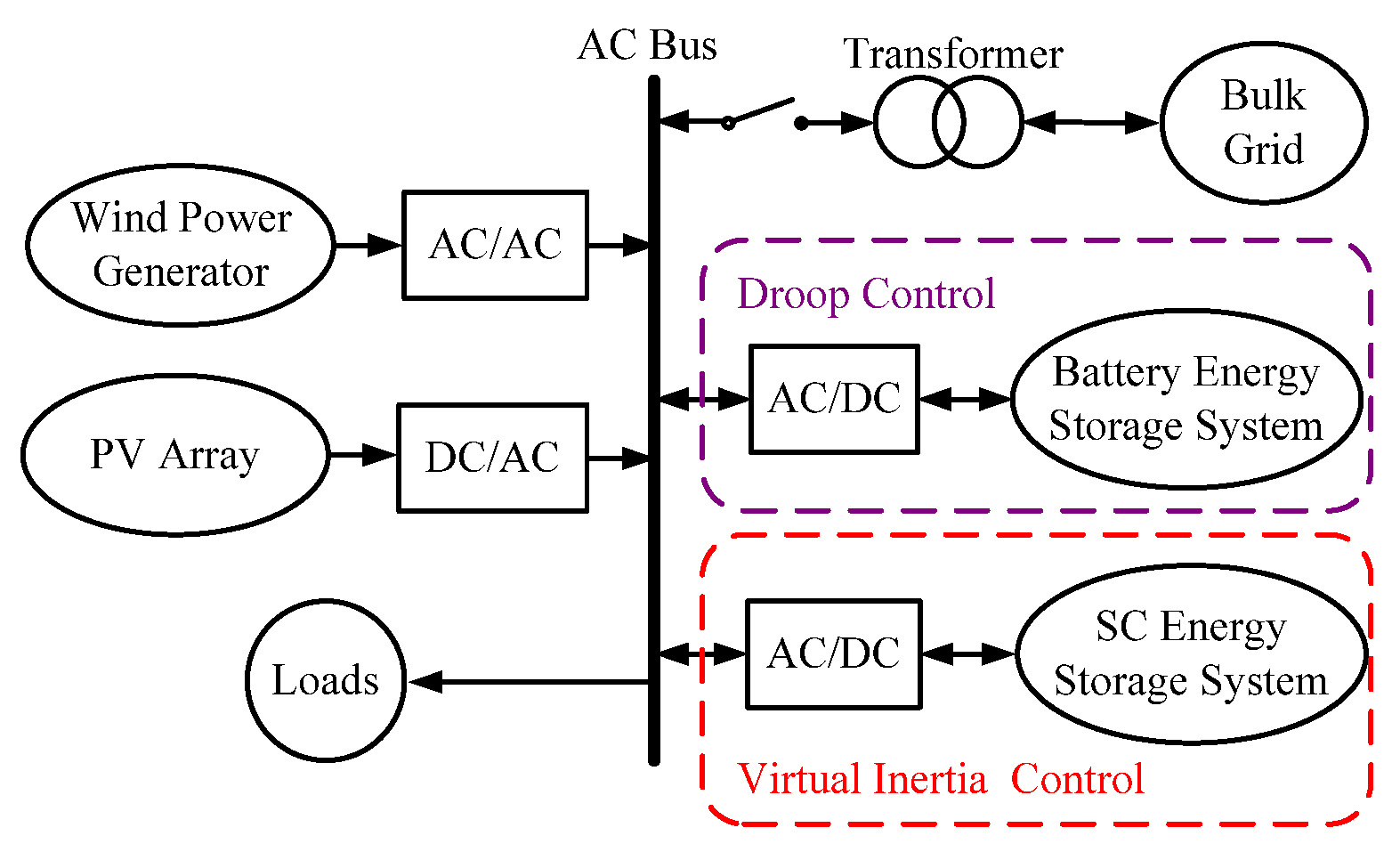
2. Topology and Control Principle of MG
2.1. Topology of MG
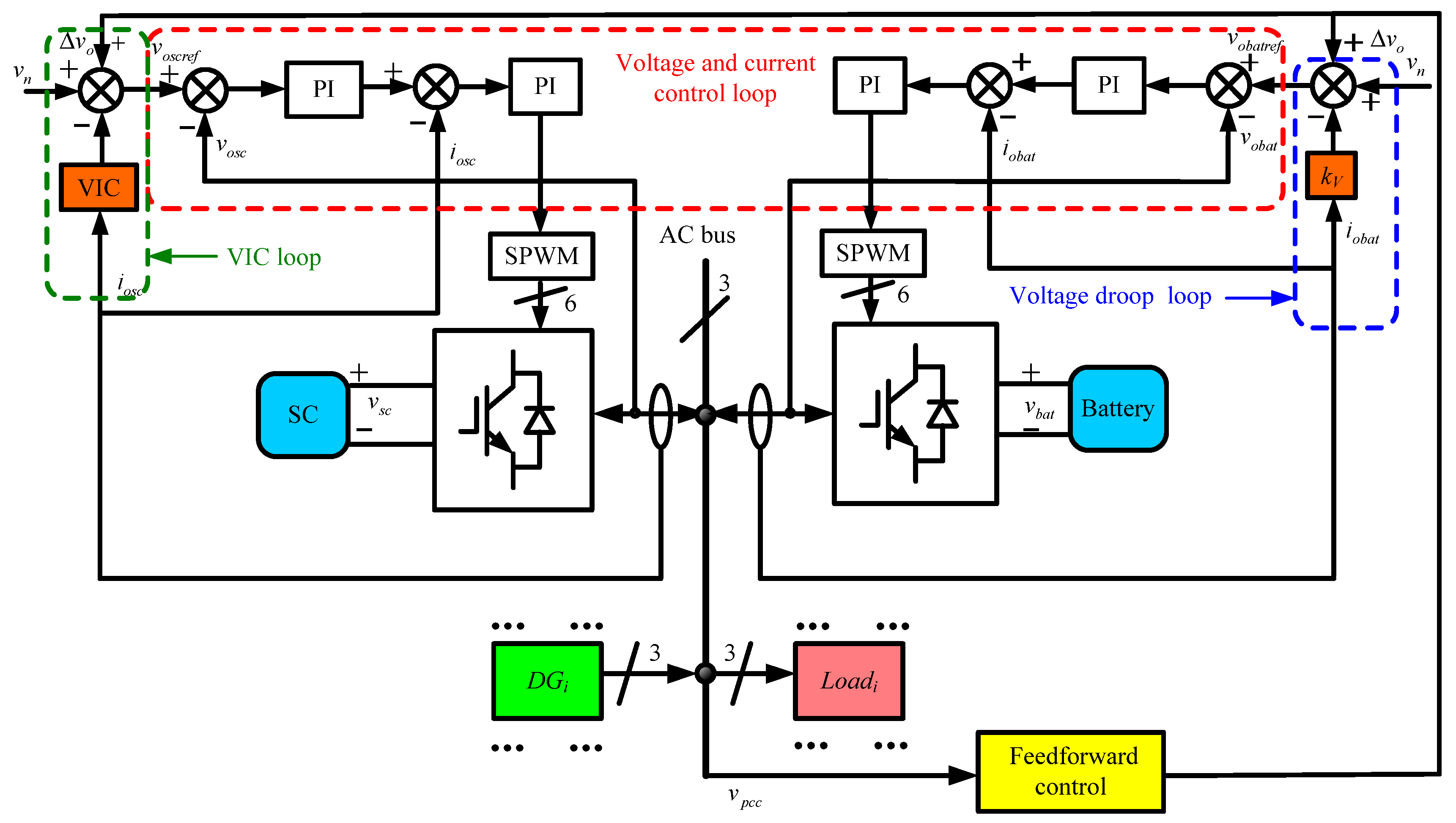
2.2. Control Principle of MG
3. A Feedforward Decoupling-Based Virtual Inertial Control of SC Converter
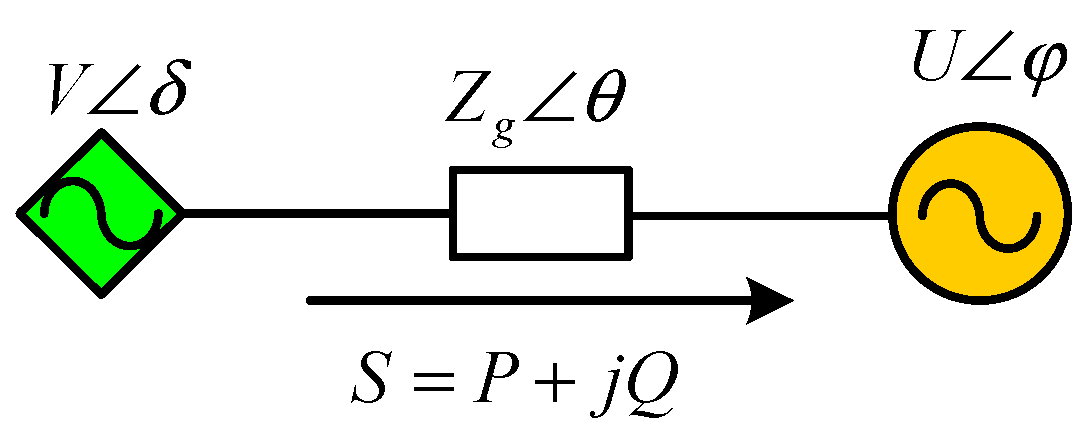
3.1. Droop Control of MG
3.2. Power Decoupling Strategy Based on Feedforward Control
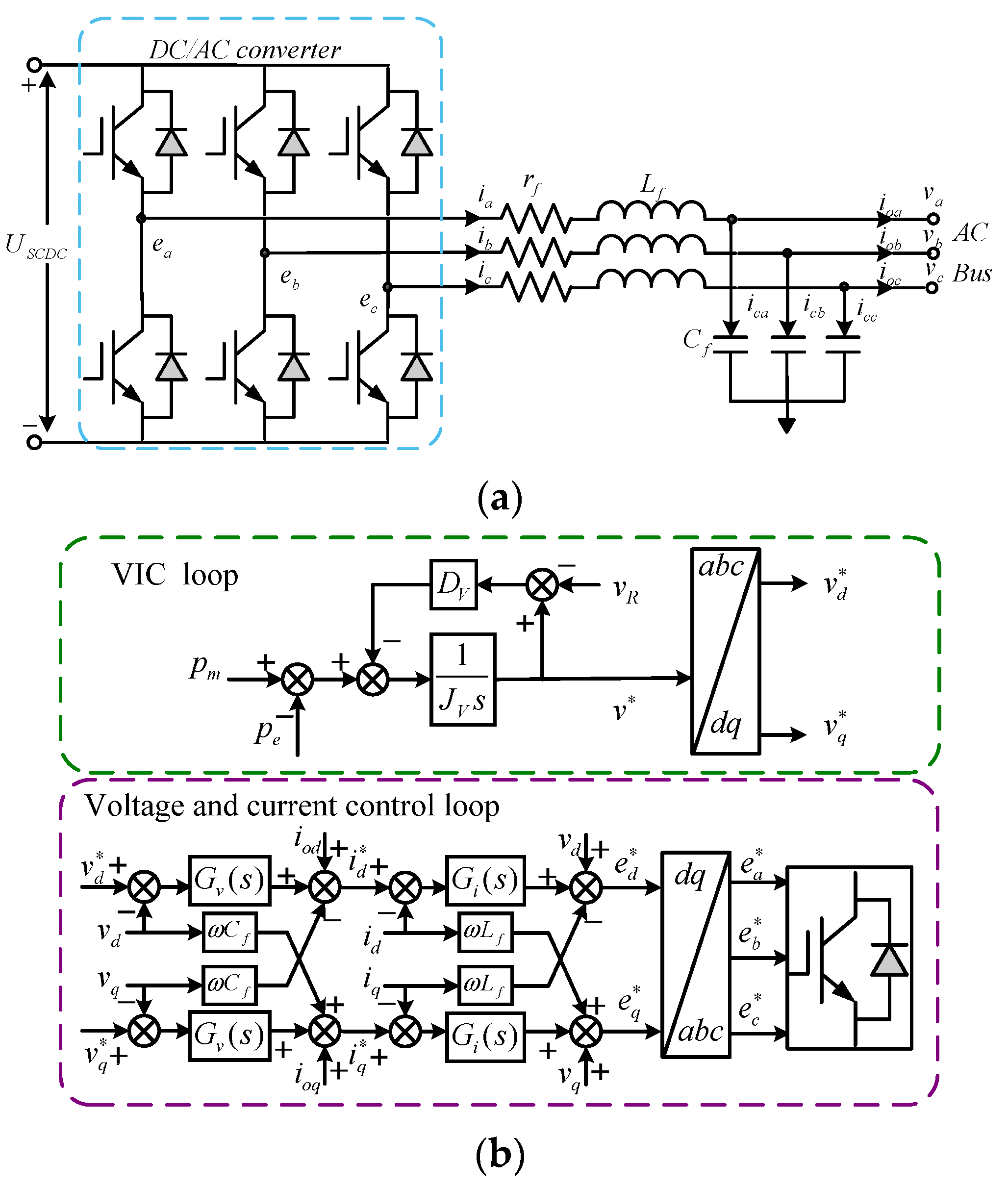
3.3. Virtual Inertia Control of SC
4. Modeling and Parameter Design of VIC
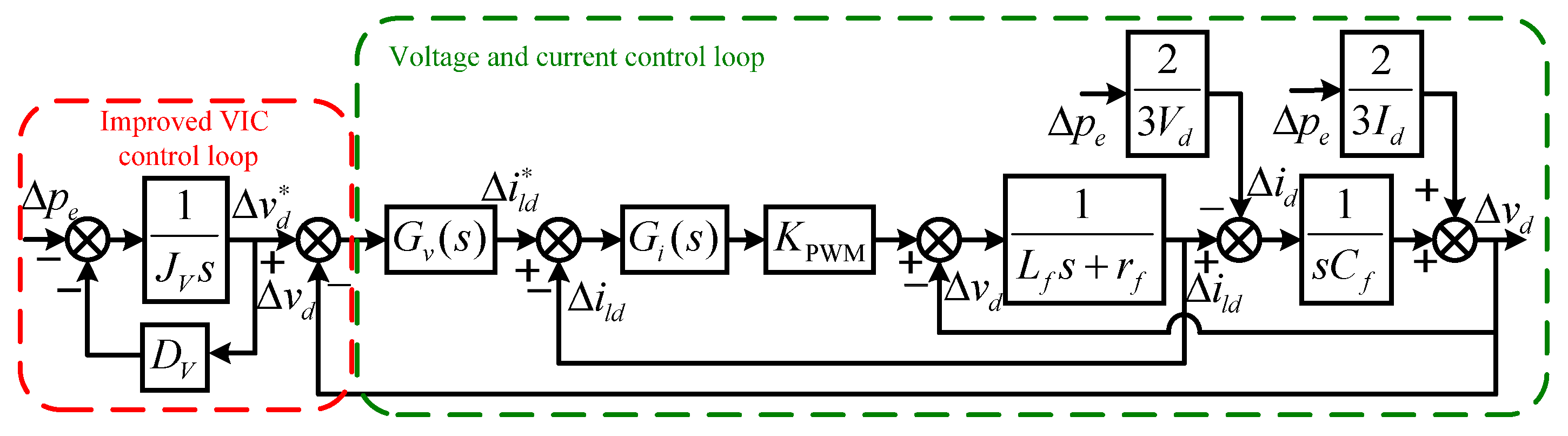
4.1. Small-Signal Modeling of the SC Converter
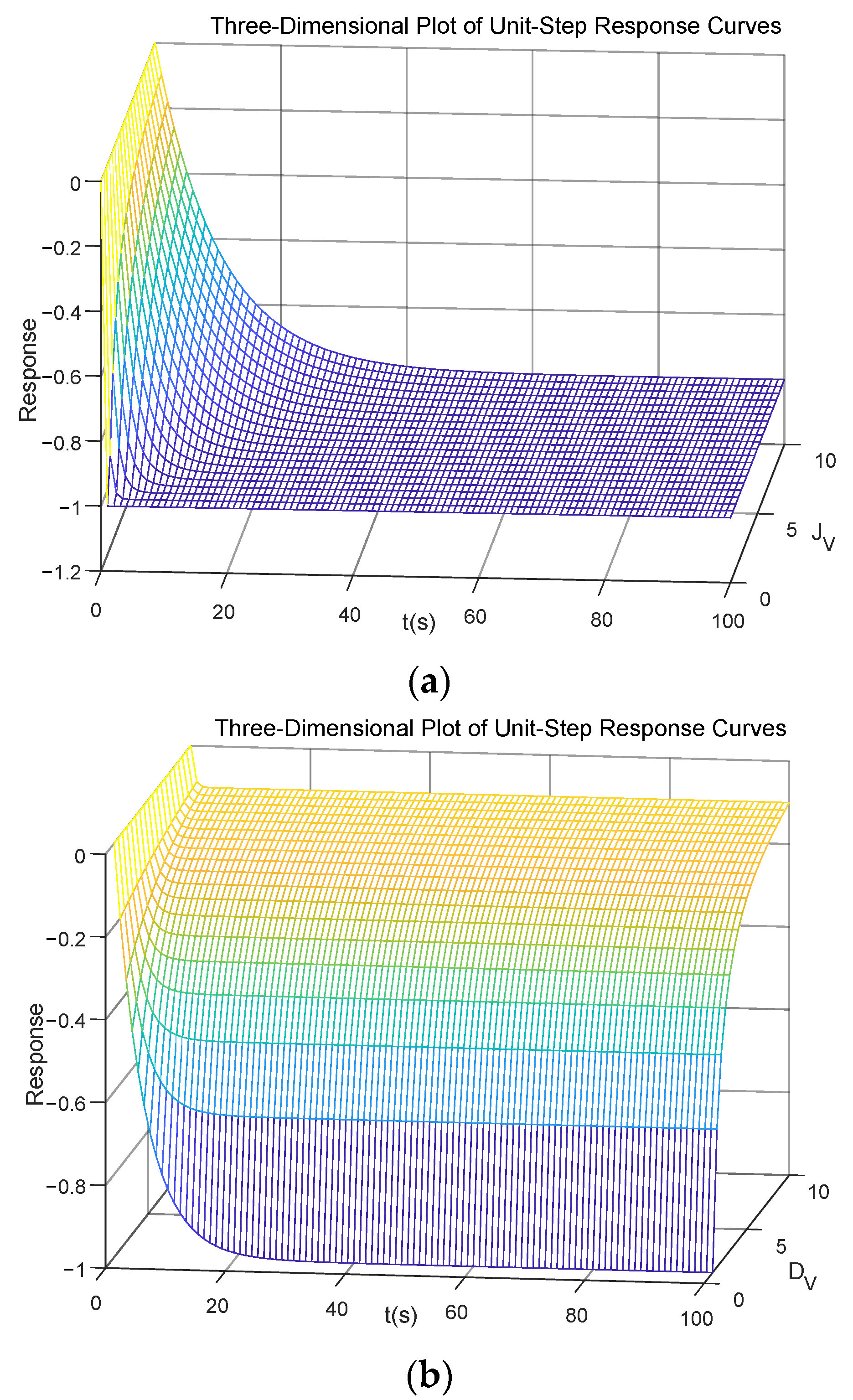
4.2. Dynamic Performance Analysis and Parameter Design
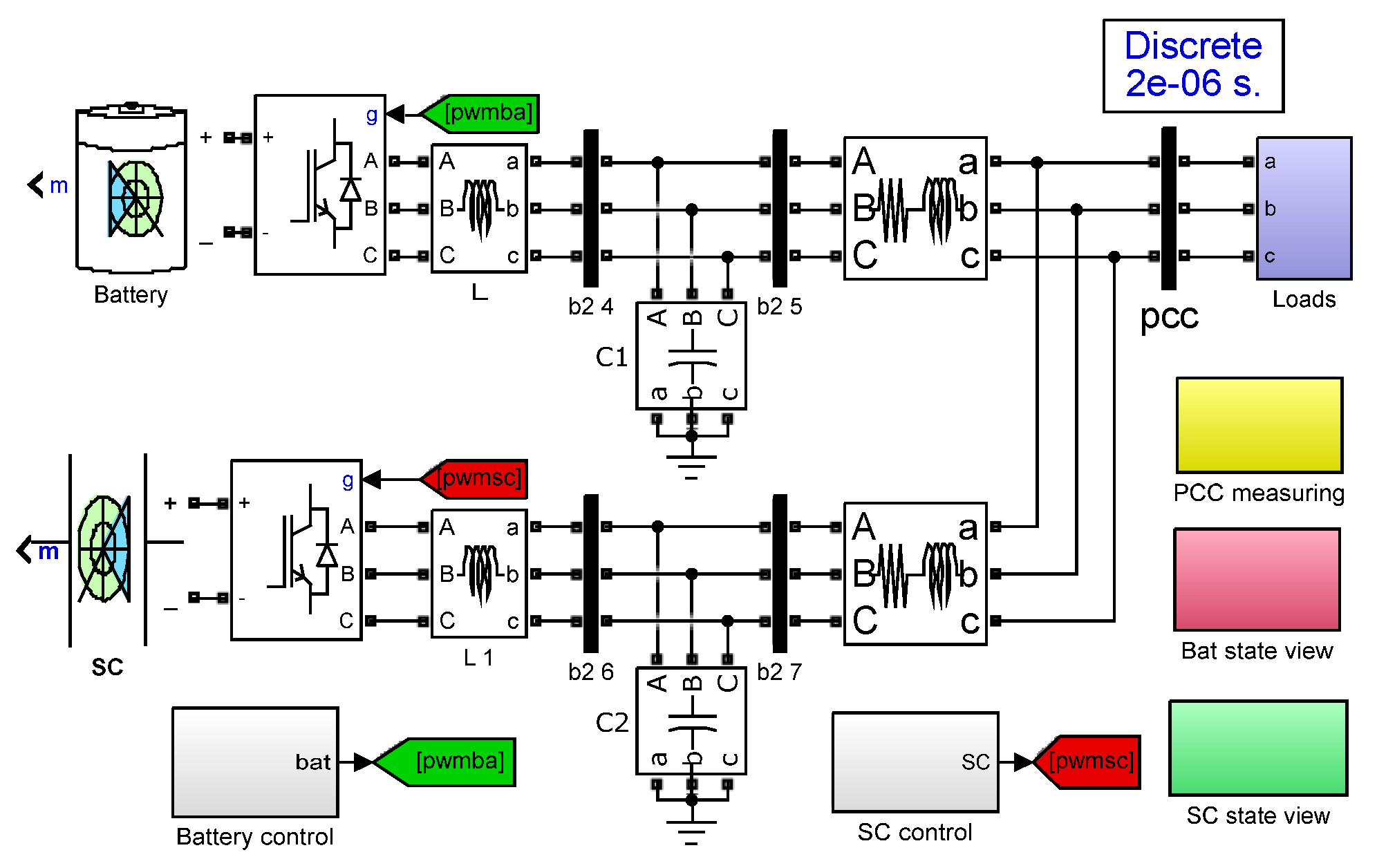
5. Simulation Study
5.1. Case A: Active Power and Reactive Power Decoupling Control
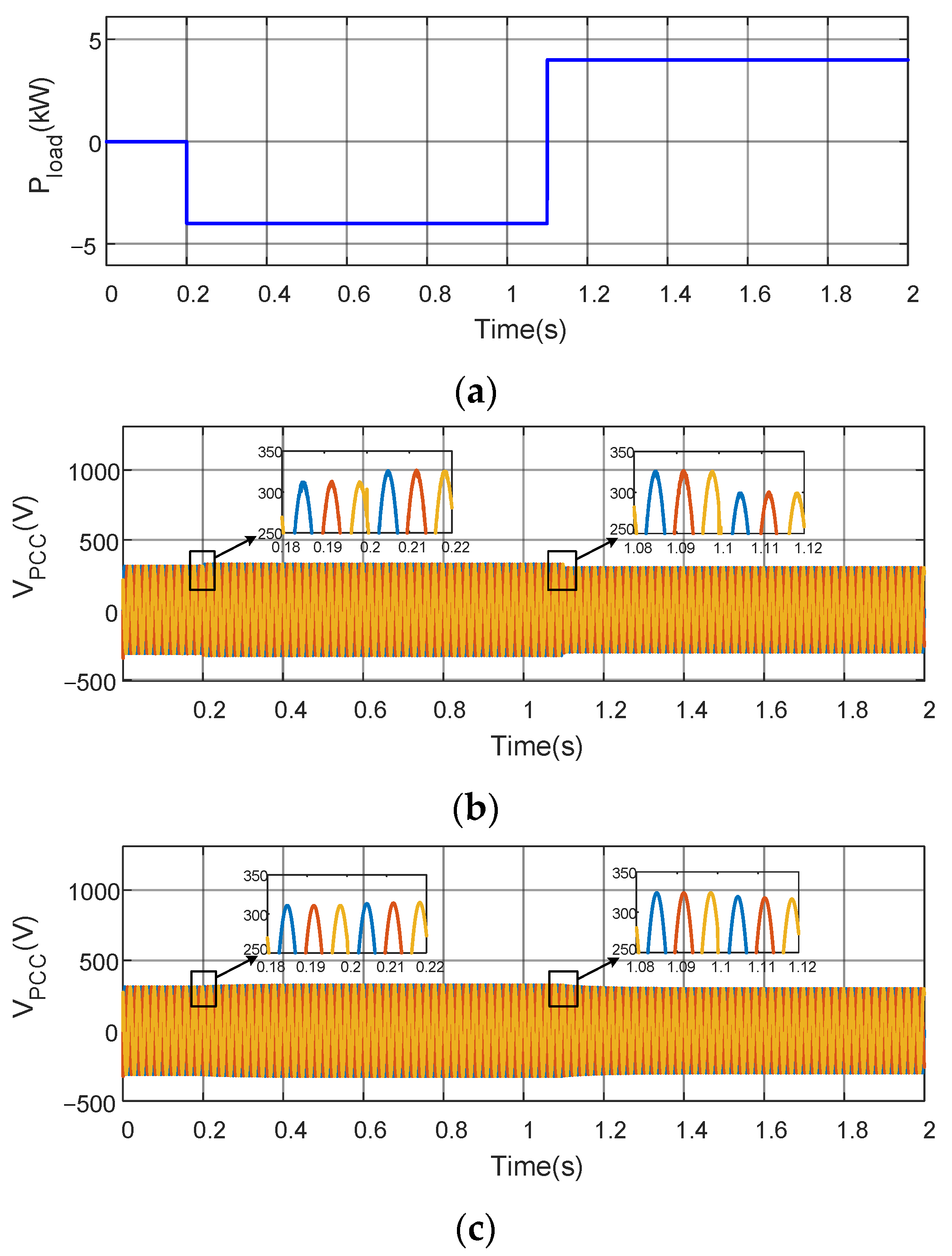
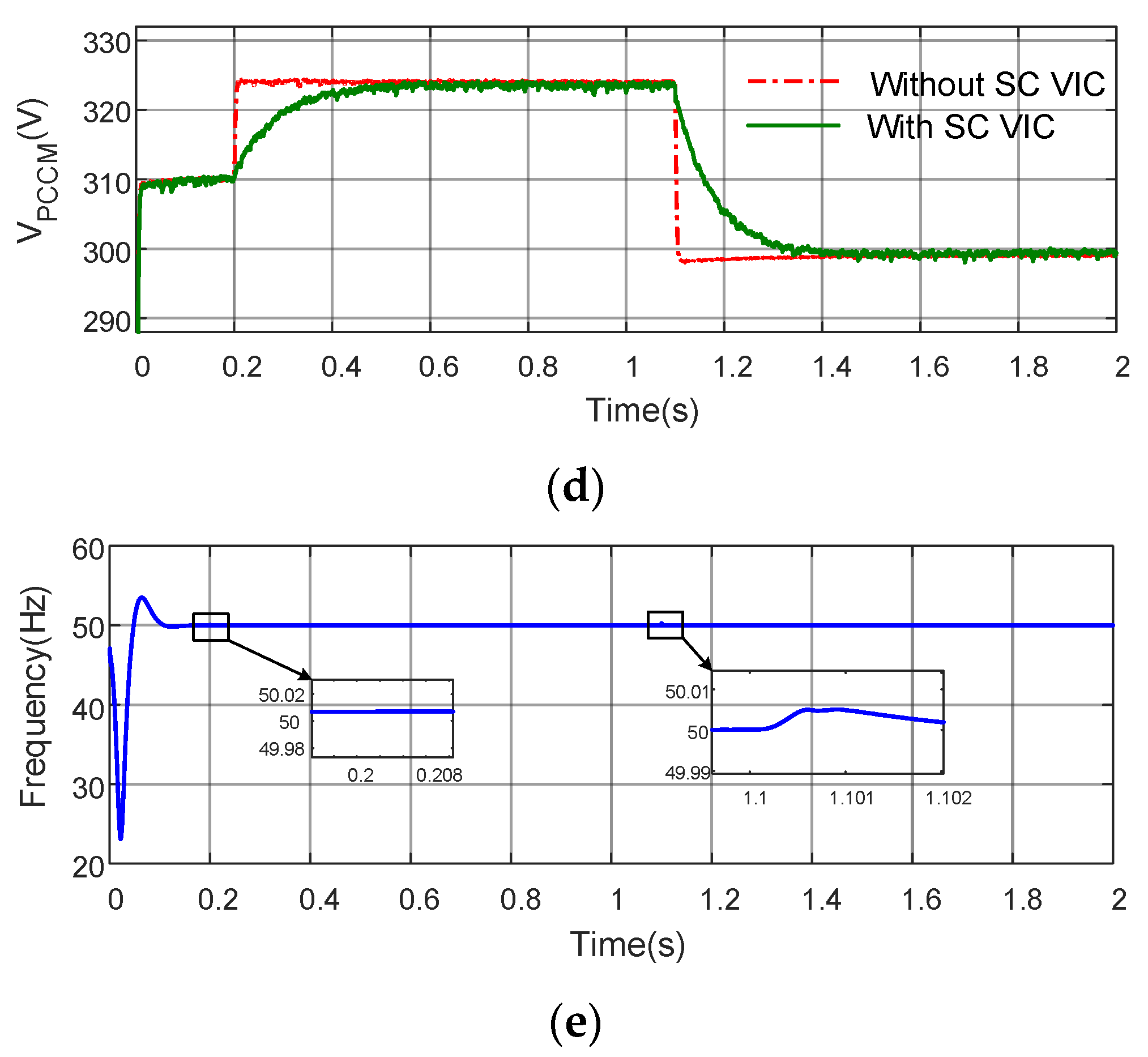
5.2. Case B: AC Bus Voltage Fluctuation Smoothing
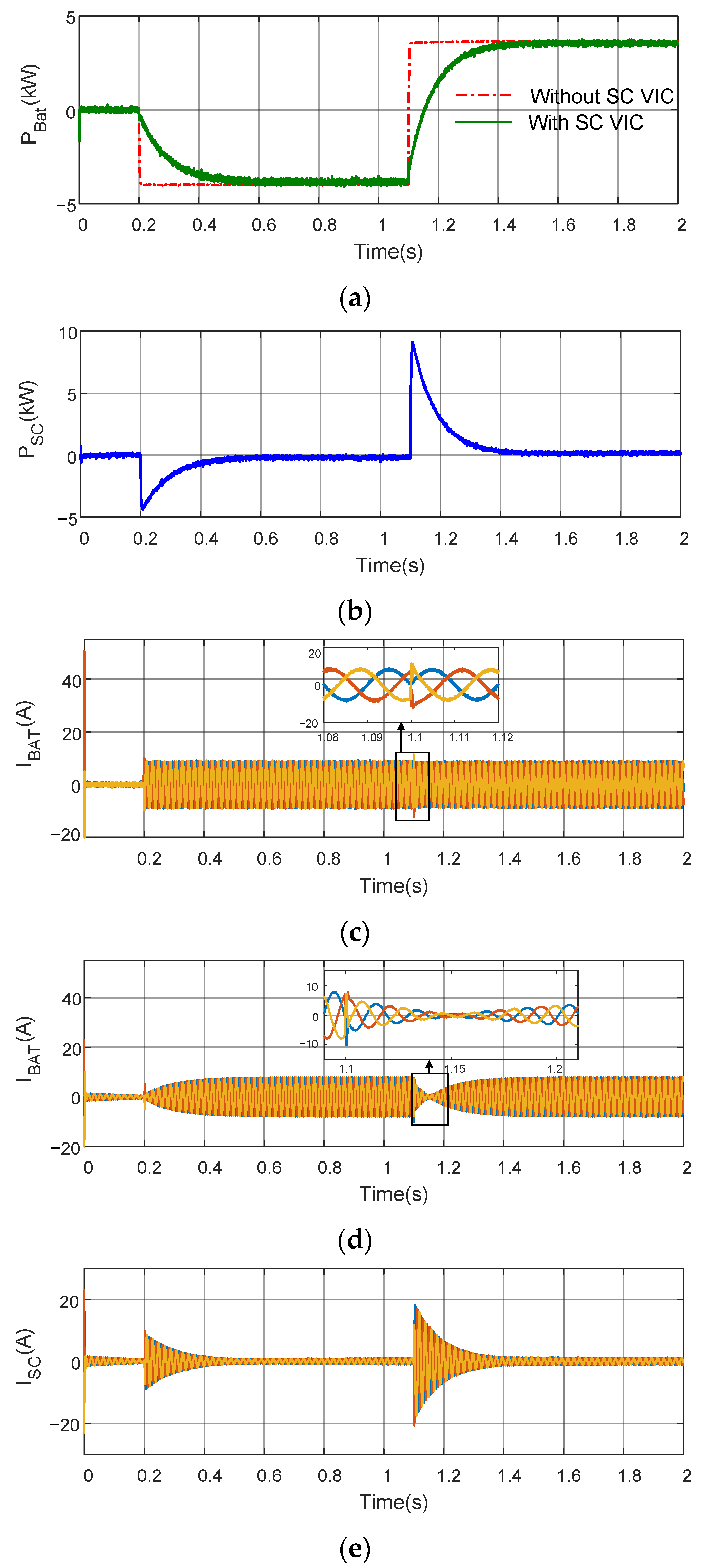
5.3. Case C: Virtual Inertia Support during Power Fluctuation
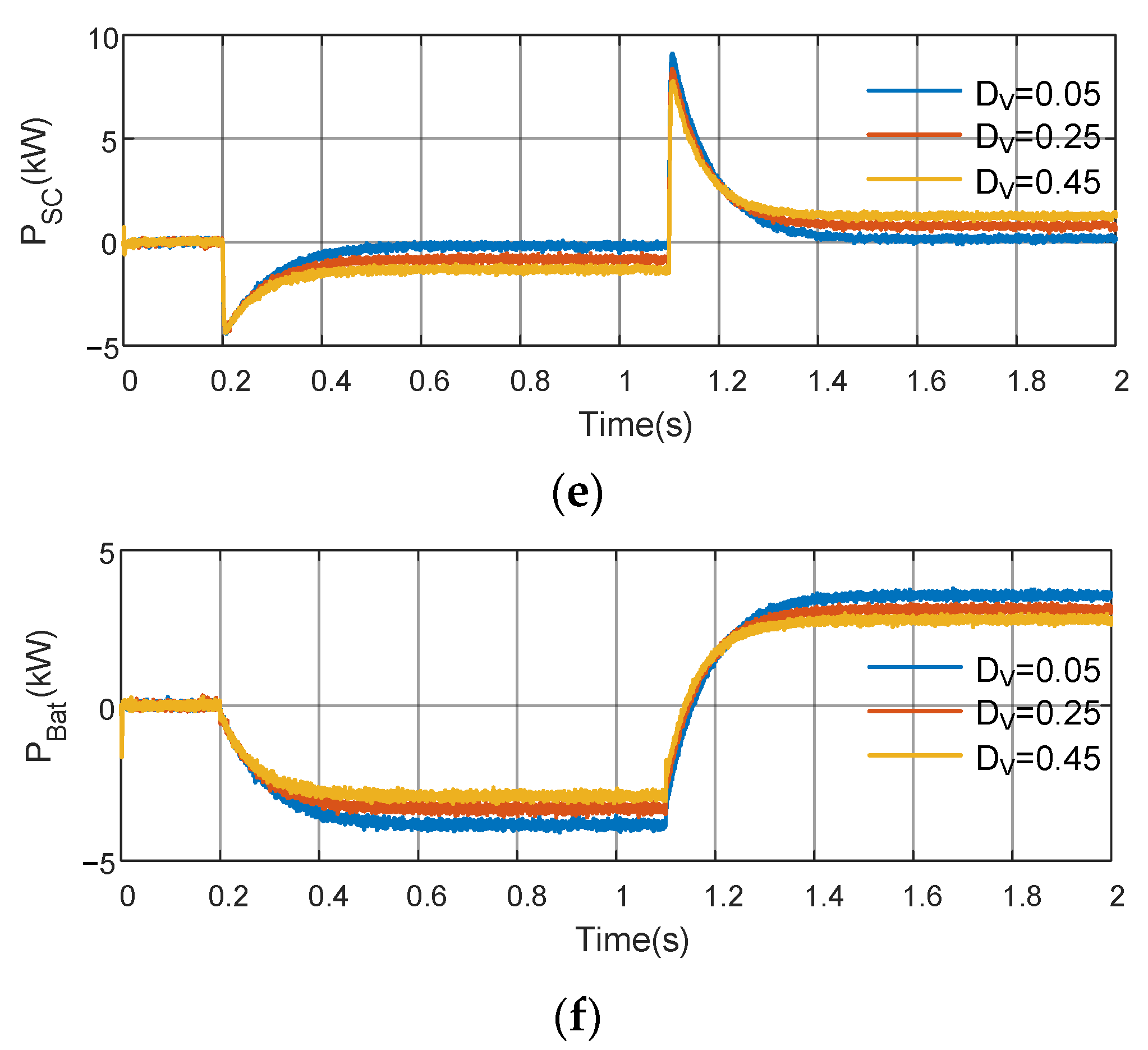
5.4. Case D: Dynamic Responses of HESS with Different Virtual Inertia and Damping
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Deng, F.; Li, X.; Zhang, X.; Mattavelli, P. An Iterative Virtual Impedance Regulation Strategy in Islanded Microgrids for Enhanced Balanced, Unbalanced and Harmonic Current Sharing. IEEE Trans. Sustain. Energy 2022, 13, 514–526. [Google Scholar] [CrossRef]
- Chen, Z.; Pei, X.J.; Yang, M.; Peng, L. An adaptive virtual resistor (avr) control strategy for low-voltage parallel inverters. IEEE Trans. Power Electron. 2019, 34, 863–876. [Google Scholar] [CrossRef]
- Zhang, J.Y.; Shu, J.; Ning, J.; Huang, L.; Wang, H. Enhanced proportional power sharing strategy based on adaptive virtual impedance in low-voltage networked microgrid. IET Gener. Transm. Dis. 2018, 12, 2566–2576. [Google Scholar] [CrossRef]
- Das, P.P.; Chattopadhayay, S.; Palma, M.l. A d–q voltage droop control method with dynamically phase-shifted phase-locked loop for inverter paralleling without any communication between individual inverters. IEEE Trans. Ind. Electron. 2017, 64, 4591–4600. [Google Scholar] [CrossRef]
- Zhong, Q.C.; Zeng, Y. Universal droop control of inverters with different types of output impedance. IEEE Access 2016, 4, 702–712. [Google Scholar] [CrossRef]
- Amin, M.; Zhong, Q.C. Resynchronization of distributed generation based on the universal droop controller for seamless transfer between operation modes. IEEE Trans. Ind. Electron. 2020, 67, 7574–7582. [Google Scholar] [CrossRef] [Green Version]
- Zhang, P.; Zhao, H.Y.; Cai, H.Y.; Shi, J.J.; He, X.N. Power decoupling strategy based on virtual negative resistor for inverters in low-voltage microgrids. IET Power Electron. 2016, 9, 1037–1044. [Google Scholar] [CrossRef]
- Wai, R.J.; Zhang, Q.Q.; Wang, Y. A novel voltage stabilization and power sharing control method based on virtual complex impedance for an off-grid microgrid. IEEE Trans. Power Electron. 2019, 34, 1863–1880. [Google Scholar] [CrossRef]
- Razi, R.; Iman-Eini, H.; Hamzeh, M. An impedance-power droop method for accurate power sharing in islanded resistive microgrids. IEEE J. Emerg. Sel. Topics Power Electron. 2020, 8, 3763–3771. [Google Scholar] [CrossRef]
- Chen, J.B.; Yue, D.; Dou, C.X.; Chen, L.; Weng, S.X.; Li, Y.M. A virtual complex impedance based P− over dot droop method for parallel-connected inverters in low-voltage ac microgrids. IEEE Trans. Ind. Informat. 2021, 17, 1763–1773. [Google Scholar]
- Gong, H.; Wang, X.; Yang, D. DQ-Frame Impedance Measurement of Three-Phase Converters Using Time-Domain MIMO Parametric Identification. IEEE Trans. Power Electron. 2021, 36, 2131–2142. [Google Scholar] [CrossRef]
- Park, J.-Y.; Ban, J.; Kim, Y.-J.; Lu, X. Supplementary Feedforward Control of DGs in a Reconfigurable Microgrid for Load Restoration. IEEE Trans. Smart Grid 2021, 12, 4641–4654. [Google Scholar] [CrossRef]
- Yuan, H.W.; Li, S.N.; Tan, S.C.; Hui, S.Y.R. Internal dynamics stabilization of single-phase power converters with lyapunov-based automatic-power-decoupling control. IEEE Trans. Power Electron. 2020, 35, 2160–2169. [Google Scholar] [CrossRef]
- Shi, K.; Yin, X.; Jiang, L.; Liu, Y.; Hu, Y.H.; Wen, H.Q. Perturbation estimation based nonlinear adaptive power decoupling control for DFIG wind turbine. IEEE Trans. Power Electron. 2020, 35, 319–333. [Google Scholar] [CrossRef]
- Li, X.L.; Li, Z.W.; Guo, L.; Zhu, J.B.; Wang, Y.Z.; Wang, C.S. Enhanced dynamic stability control for low-inertia hybrid ac/dc microgrid with distributed energy storage systems. IEEE Access 2019, 7, 91234–91242. [Google Scholar] [CrossRef]
- Xu, Q.; Dragicevic, T.; Xie, L.; Blaabjerg, F. Artificial Intelligence-Based Control Design for Reliable Virtual Synchronous Generators. IEEE Trans. Power Electron. 2021, 36, 9453–9464. [Google Scholar] [CrossRef]
- Fang, J.Y.; Lin, P.F.; Li, H.C.; Yang, Y.H.; Tang, Y. An improved virtual inertia control for three-phase voltage source converters connected to a weak grid. IEEE Trans. Power Electron. 2019, 34, 8660–8670. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.Y.; Zhu, Z.Z.; Fu, Y.; Shen, W.Q. Multi-objective virtual inertia control of renewable power generator for transient stability improvement in interconnected power system. Int. J. Electr. Power Energy Syst. 2020, 117, 2020. [Google Scholar] [CrossRef]
- Karimi, A.; Khayat, Y.; Naderi, M.; Dragicevic, T.; Mirzaei, R.; Blaabjerg, F.; Bevrani, H. Inertia response improvement in ac microgrids: A fuzzy-based virtual synchronous generator control. IEEE Trans. Power Electron. 2020, 35, 4321–4331. [Google Scholar] [CrossRef]
- He, L.; Li, Y.; Guerrero, J.M.; Cao, Y.J. A comprehensive inertial control strategy for hybrid ac/dc microgrid with distributed generations. IEEE Trans. Smart Grid 2020, 11, 1737–1747. [Google Scholar] [CrossRef]
- Wu, W.H.; Chen, Y.D.; Luo, A.; Zhou, L.M.; Zhou, X.P.; Yang, L.; Dong, Y.T.; Guerrero, J.M. A virtual inertia control strategy for dc microgrids analogized with virtual synchronous machines. IEEE Trans. Ind. Electron. 2017, 64, 6005–6016. [Google Scholar] [CrossRef] [Green Version]
- Fang, J.Y.; Tang, Y.; Li, H.C.; Li, X.Q. A battery/ultracapacitor hybrid energy storage system for implementing the power management of virtual synchronous generators. IEEE Trans. Power Electron. 2018, 33, 2820–2824. [Google Scholar] [CrossRef]
- Wang, H.H.; Khambadkone, A.M.; Yu, X.X. Control of parallel connected power converters for low voltage microgrid-part ii: Dynamic electrothermal modeling. IEEE Trans. Power Electron. 2010, 25, 2971–2980. [Google Scholar] [CrossRef]
- Li, B.; Zhou, L.; Yu, X.R.; Zheng, C.; Liu, J.H. Improved power decoupling control strategy based on virtual synchronous generator. IET Power Electron. 2017, 10, 462–470. [Google Scholar] [CrossRef]
- Li, M.X.; Wang, Y.; Liu, Y.H.; Xu, N.Y.; Shu, S.R.; Lei, W.J. Enhanced Power Decoupling Strategy for Virtual Synchronous Generator. IEEE Access 2020, 8, 73601–73613. [Google Scholar] [CrossRef]
- Wen, T.L.; Zhu, D.H.; Zou, X.D.; Jiang, B.C.; Peng, L.; Kang, Y. Power Coupling Mechanism Analysis and Improved Decoupling Control for Virtual Synchronous Generator. IEEE Trans. Power Electron. 2021, 36, 3028–3041. [Google Scholar] [CrossRef]
- Kotra, S.; Mishra, M.K. A supervisory power management system for a hybrid microgrid with hess. IEEE Trans. Ind. Electron. 2017, 64, 3640–3649. [Google Scholar] [CrossRef]
- Lin, P.F.; Wang, P.; Xiao, J.F.; Wang, J.J.; Jin, C.; Tang, Y. An integral droop for transient power allocation and output impedance shaping of hybrid energy storage system in dc microgrid. IEEE Trans. Power Electron. 2018, 33, 6262–6277. [Google Scholar] [CrossRef]
- Li, D.M.; Wu, Z.J.; Zhao, B.; Zhang, L.Q. An improved droop control for balancing state of charge of battery energy storage systems in ac microgrid. IEEE Access 2020, 8, 71917–71929. [Google Scholar] [CrossRef]
- Xu, Q.W.; Hu, X.L.; Wang, P.; Xiao, J.F.; Tu, P.F.; Wen, C.Y.; Lee, M.Y. A decentralized dynamic power sharing strategy for hybrid energy storage system in autonomous dc microgrid. IEEE Trans. Ind. Electron. 2017, 64, 5930–5941. [Google Scholar] [CrossRef]
- Rocabert, J.; Luna, A.; Blaabjerg, F.; Rodríguez, P. Control of Power Converters in AC Microgrids. IEEE Trans. Power Electron. 2012, 27, 4734–4749. [Google Scholar] [CrossRef]
- Fawzy, A.; Bakeer, A.; Magdy, G.; Atawi, I.E.; Roshdy, M. Adaptive Virtual Inertia-Damping System Based on Model Predictive Control for Low-Inertia Microgrids. IEEE Access 2021, 9, 109718–109731. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description | Value |
|---|---|---|
| Vpcc | AC bus voltage magnitude | 311 V |
| f0 | AC bus frequency | 50 Hz |
| Lf | Filter inductance | 2 mH |
| rf | Filter inductance resistance | 0.1 Ω |
| Cf | Filter capacitance | 30 μF |
| fs | Switching frequency of converter | 20 kHz |
| Udc | Nominal DC link voltage | 750 V |
| GFδV | Feedforward coefficient | 0.0042 |
| GFVδ | Feedforward coefficient | −410.519 |
| Rline | Feeder line resistance | 0.238 Ω |
| Xline | Feeder line inductance | 0.314 Ω |
| Symbol | Description | Value |
|---|---|---|
| JV | Virtual inertia | 0.1 |
| DV | Virtual damping | 0.05 |
| kV | Droop coefficent | 0.0322 |
| Kipsc | Proportional gain of current loop for SC | 0.1 |
| Kvpsc | Proportional gain of voltage loop for SC | 10 |
| Kvisc | Integral gain of voltage loop for SC | 53 |
| PBatm | Maximum power of battery converter | 10 kW |
| PSC | Maximum power of SC converter | 15 kW |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, R.; Wang, S.; Liu, G.; Wen, S.; Zhang, J.; Ma, Y. An Improved Virtual Inertia Control Strategy for Low Voltage AC Microgrids with Hybrid Energy Storage Systems. Energies 2022, 15, 442. https://doi.org/10.3390/en15020442
Liu R, Wang S, Liu G, Wen S, Zhang J, Ma Y. An Improved Virtual Inertia Control Strategy for Low Voltage AC Microgrids with Hybrid Energy Storage Systems. Energies. 2022; 15(2):442. https://doi.org/10.3390/en15020442
Chicago/Turabian StyleLiu, Ruiming, Shengtie Wang, Guangchen Liu, Sufang Wen, Jianwei Zhang, and Yuechao Ma. 2022. "An Improved Virtual Inertia Control Strategy for Low Voltage AC Microgrids with Hybrid Energy Storage Systems" Energies 15, no. 2: 442. https://doi.org/10.3390/en15020442
APA StyleLiu, R., Wang, S., Liu, G., Wen, S., Zhang, J., & Ma, Y. (2022). An Improved Virtual Inertia Control Strategy for Low Voltage AC Microgrids with Hybrid Energy Storage Systems. Energies, 15(2), 442. https://doi.org/10.3390/en15020442