
Modeling of Fuel Cells Characteristics in Relation to Real Driving Conditions of FCHEV Vehicles


Abstract
:1. Introduction
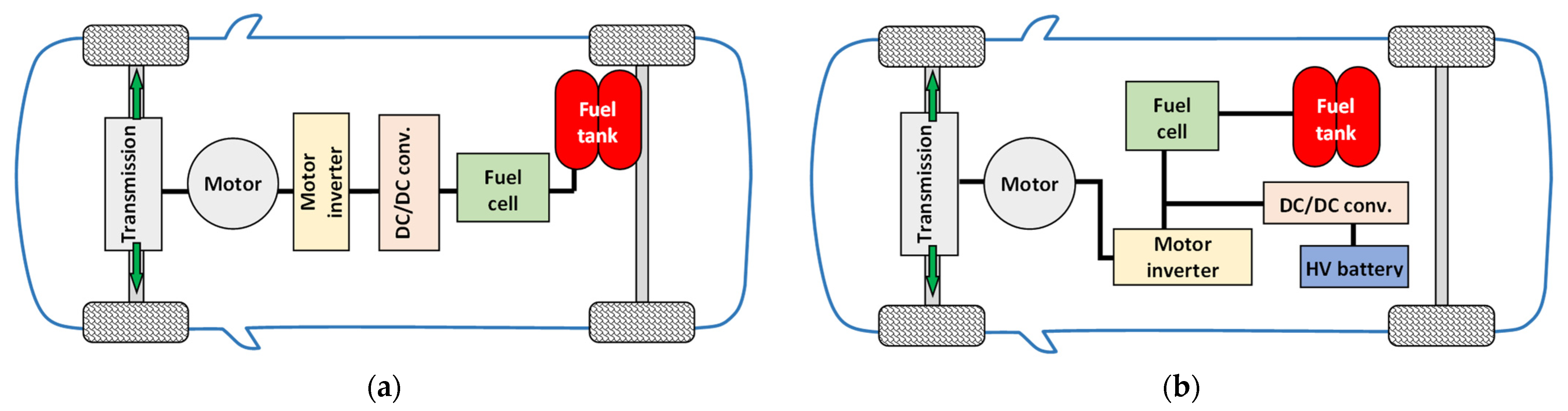
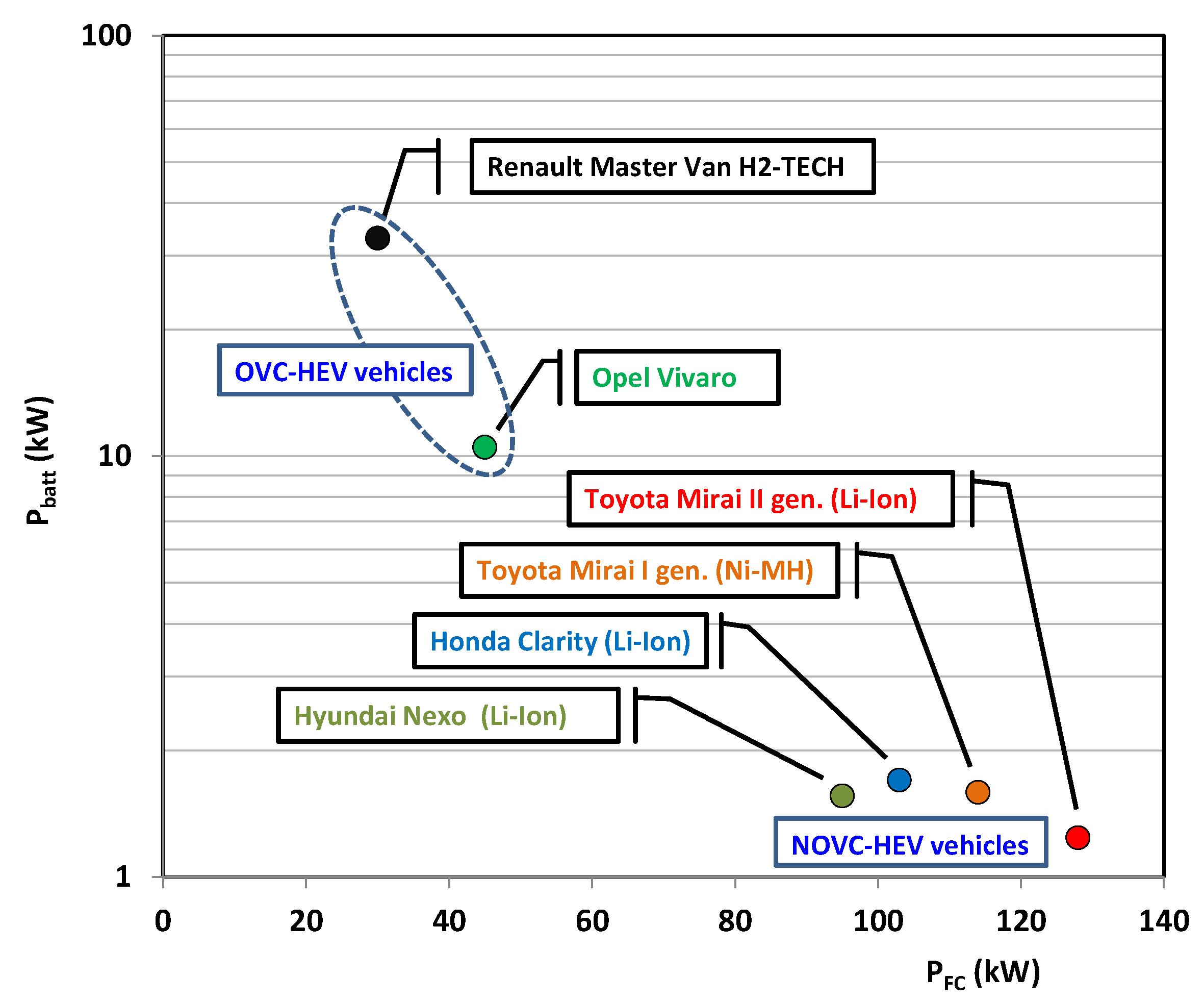
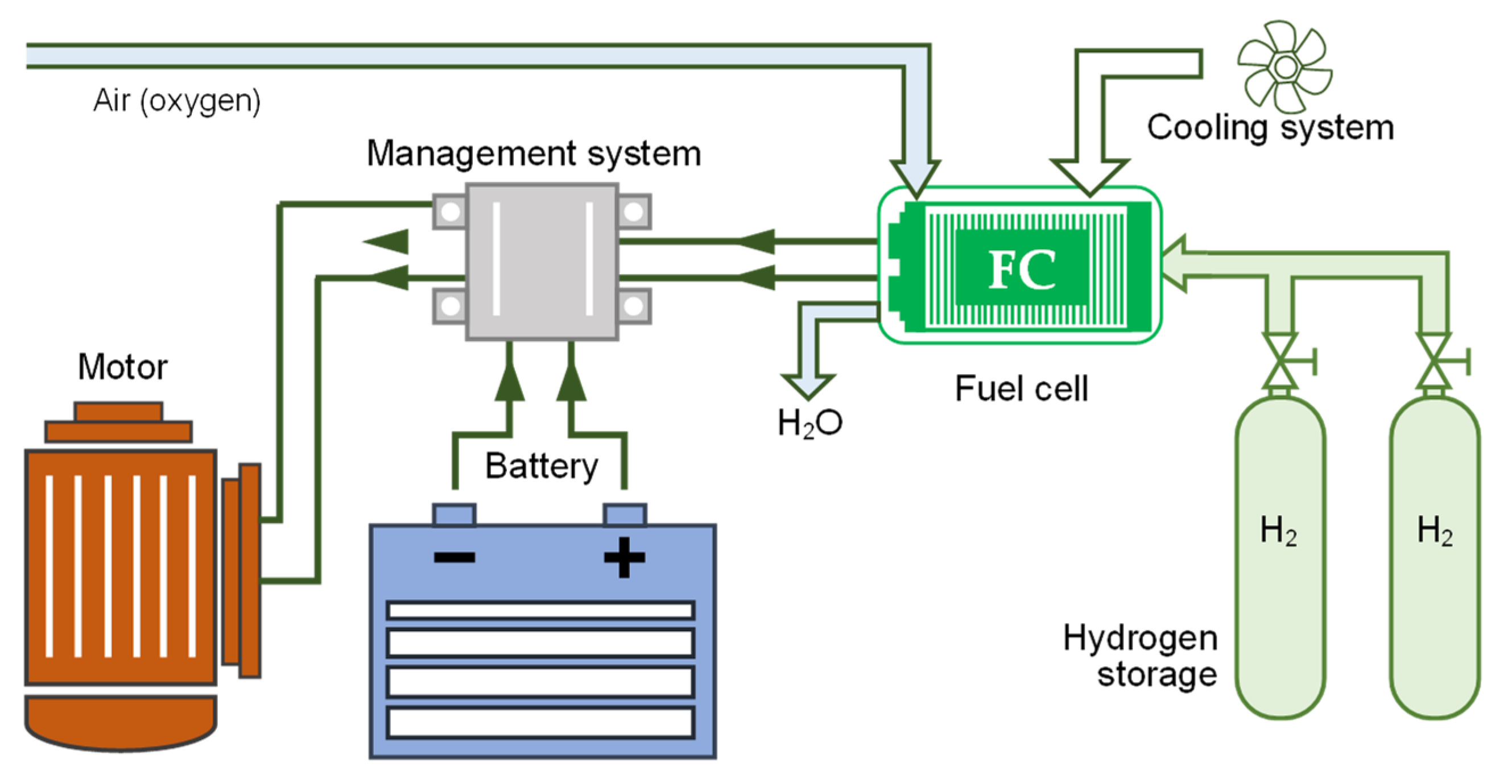
2. Fuel Cell Use in Vehicle Drive Systems
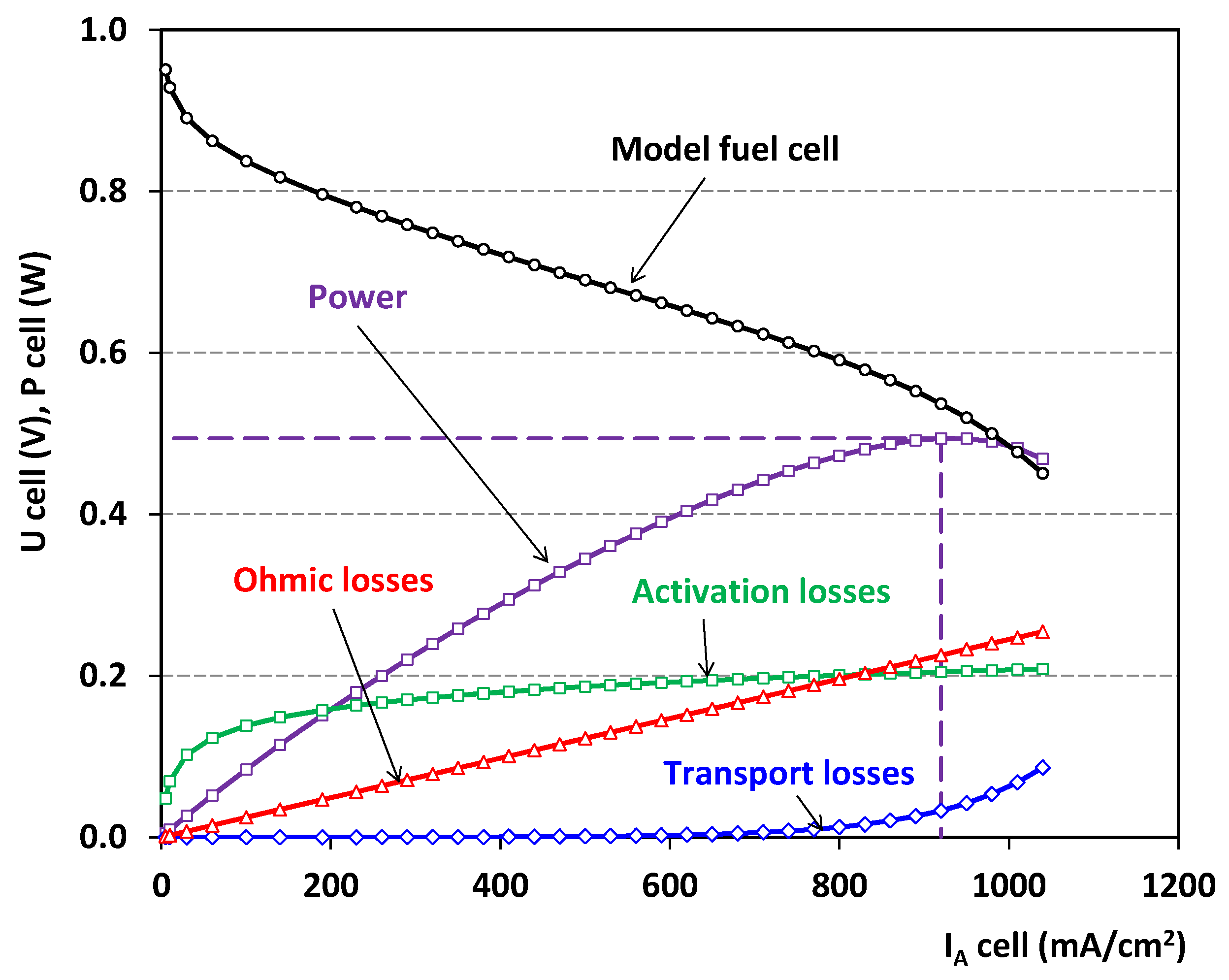
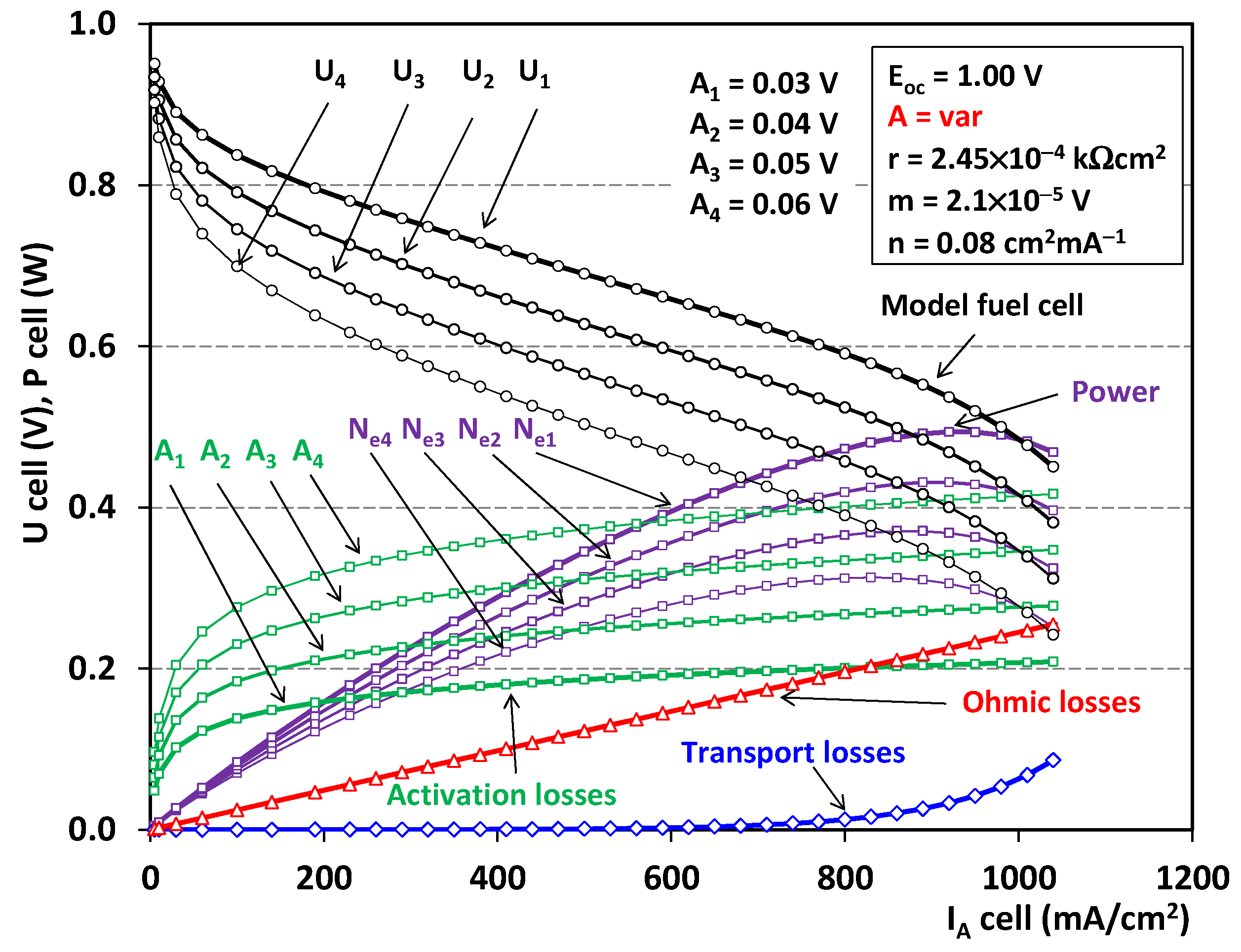
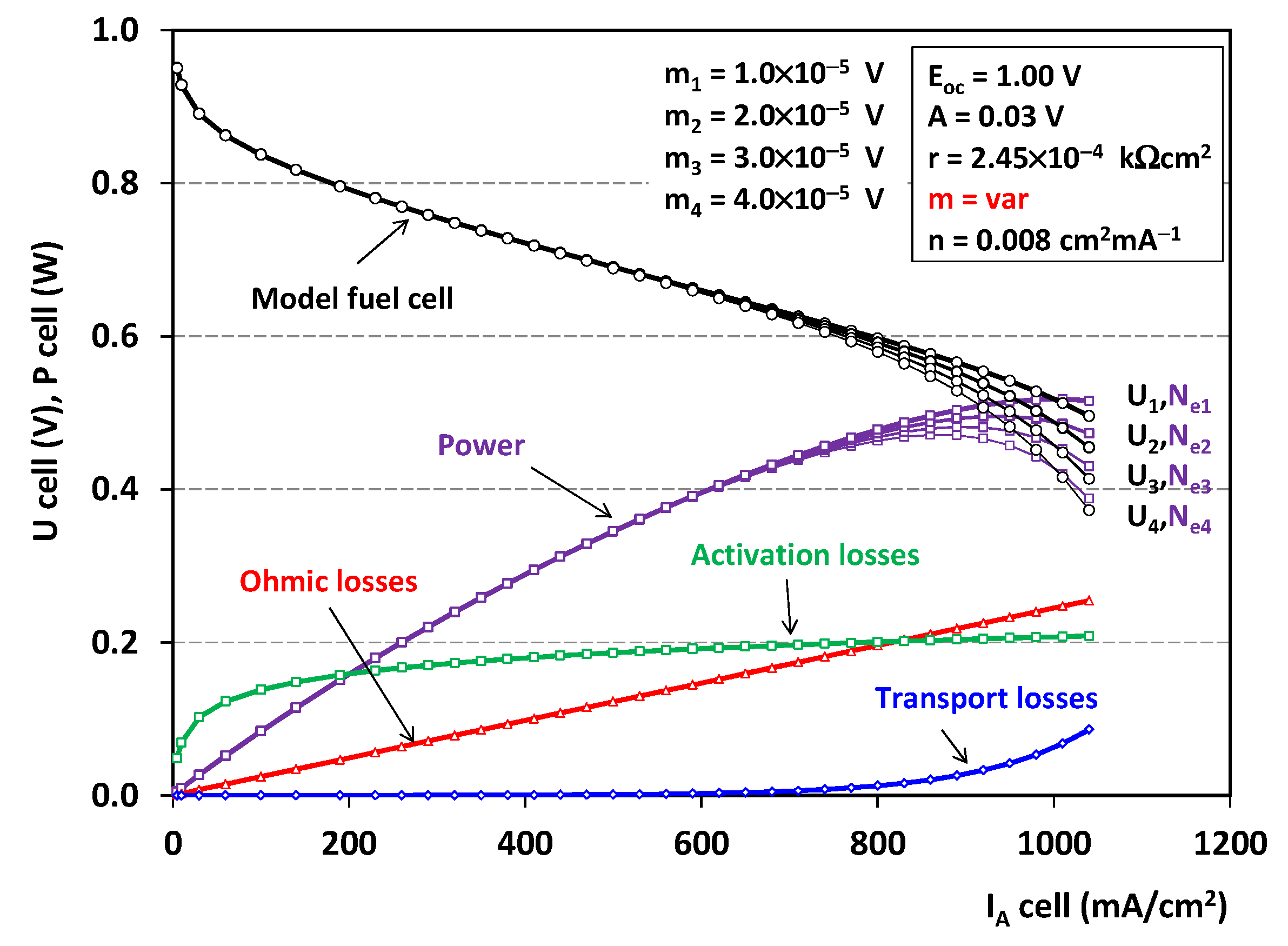
3. Modeling Fuel Cells
- Voltage activation;
- Resistive;
- Mass transport.
- Increasing the cell temperature;
- Use of effective catalysts;
- Increasing the roughness of the electrodes’ surface, which increases the cell surface and leads to an increase in the current intensity;
- Increasing the concentration of the reactants, e.g., using pure oxygen instead of air;
- Increasing the reagents pressure.
- Using electrodes with the highest possible conductivity;
- Dilute the electrolyte to the maximum viable values.
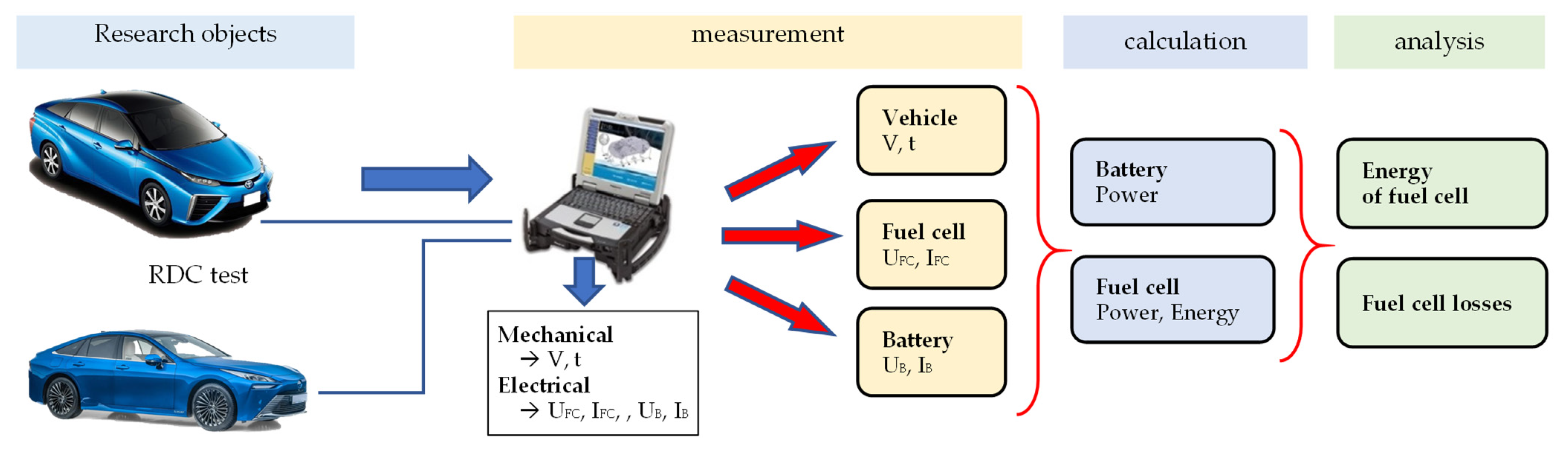
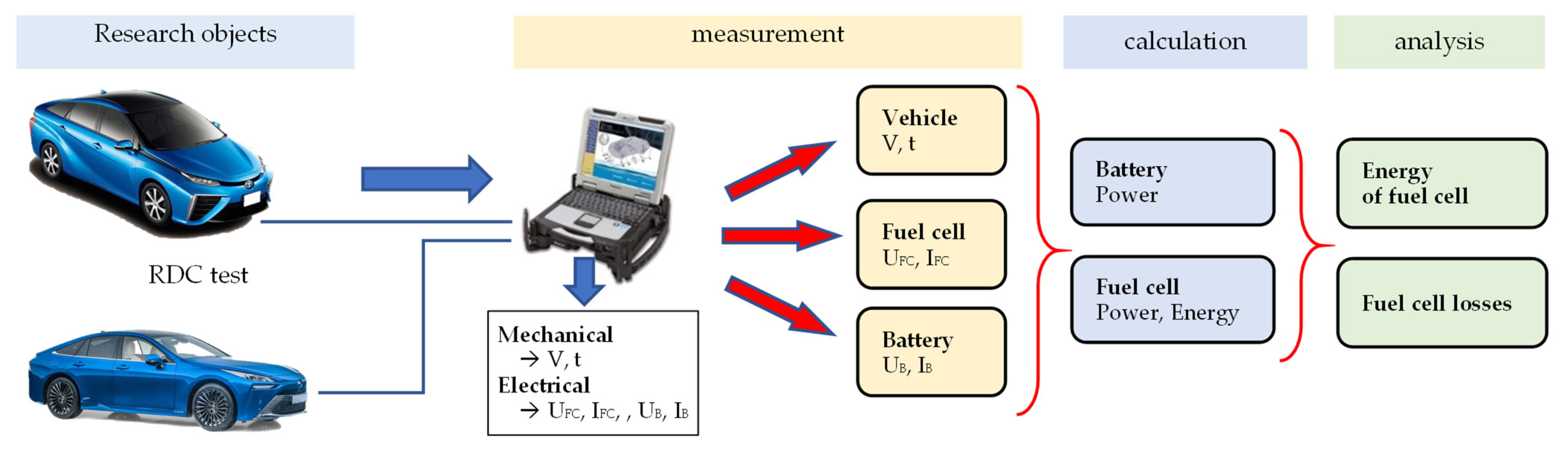
4. Materials and Methods
5. Results
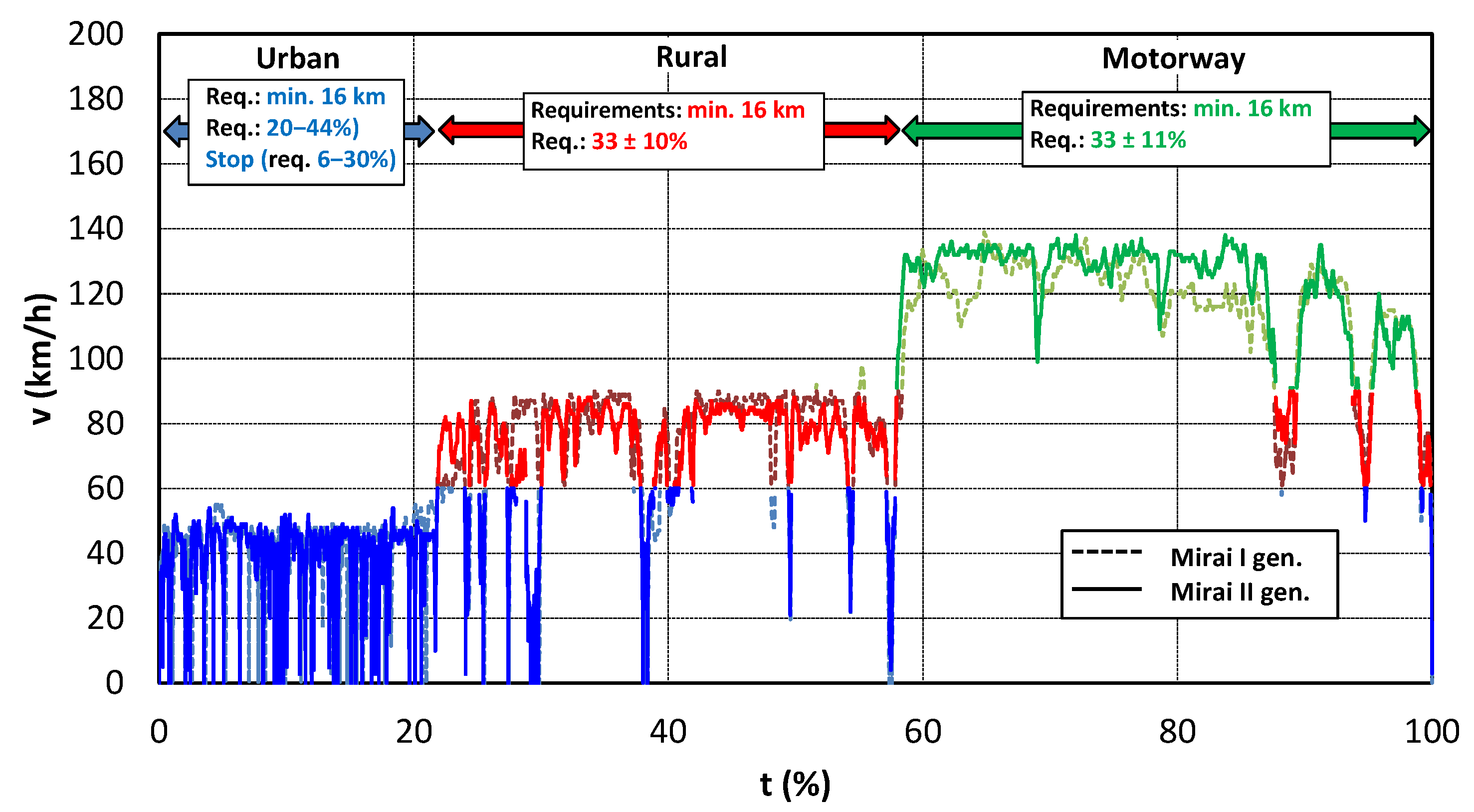
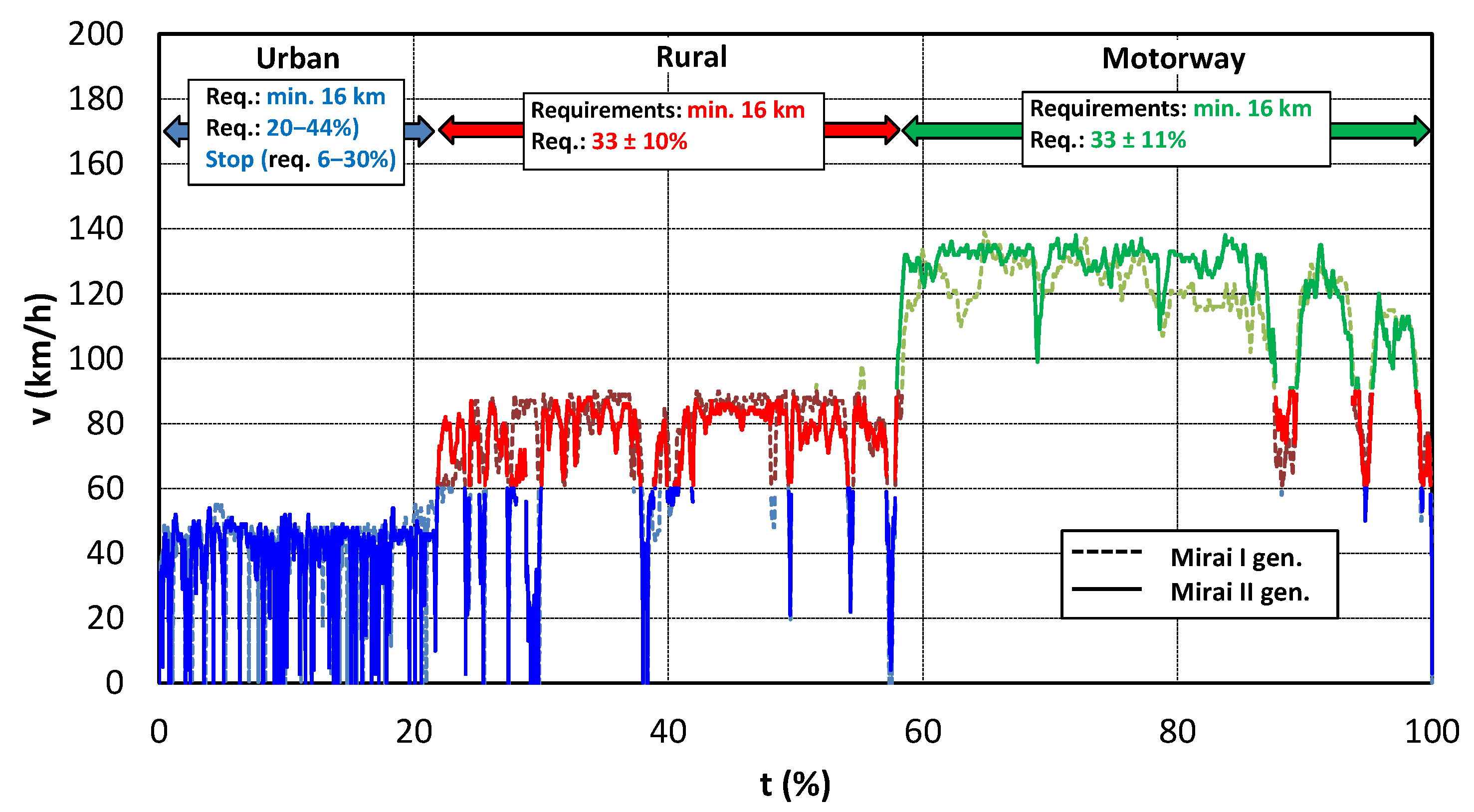
5.1. Driving Test Evaluation
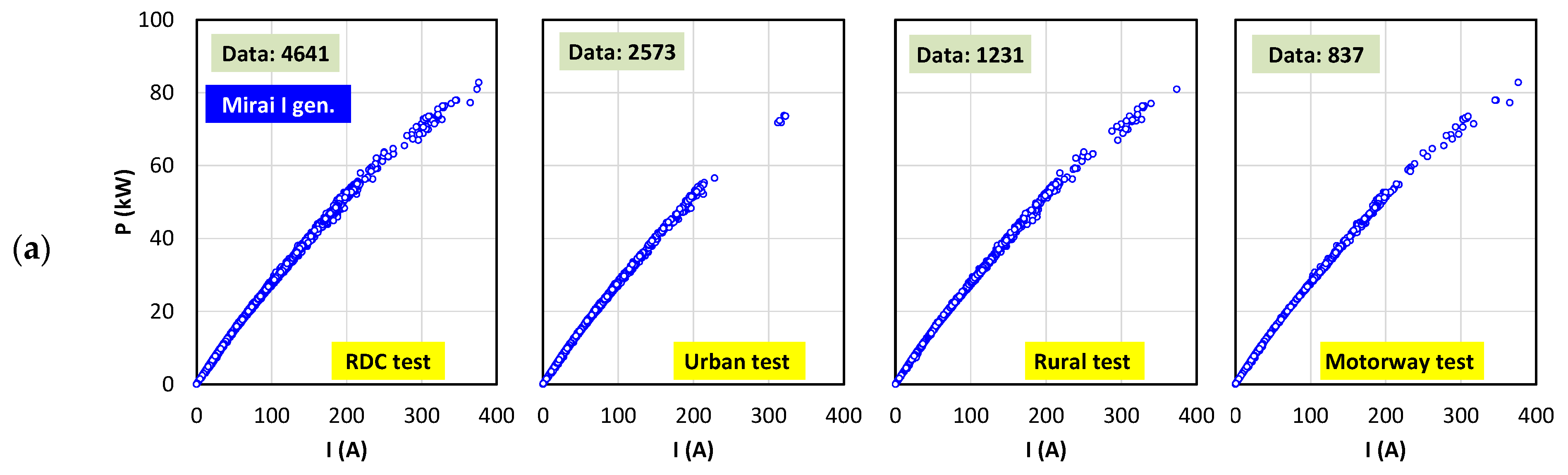
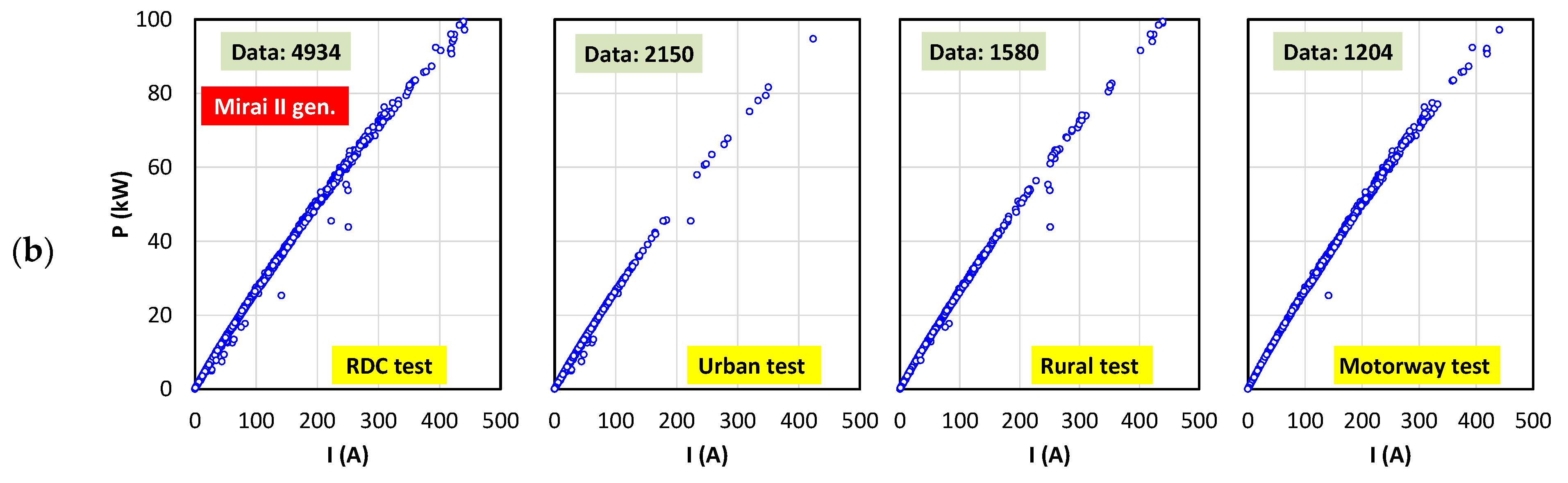
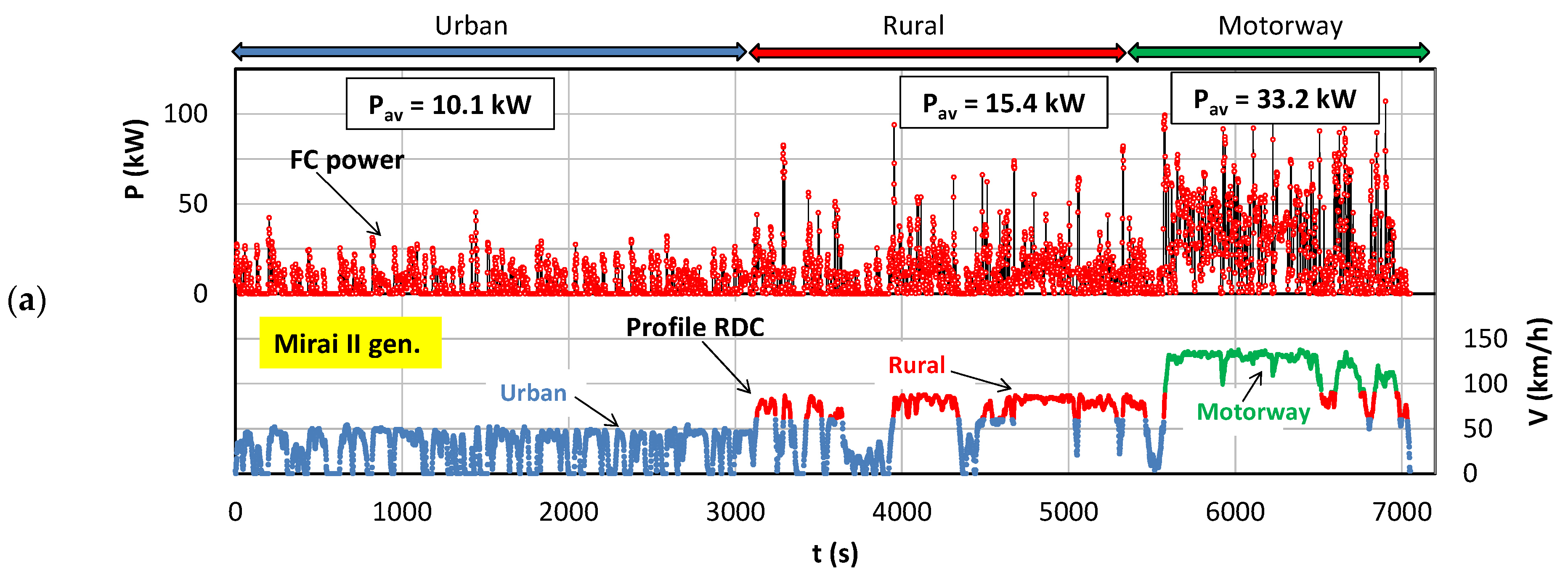
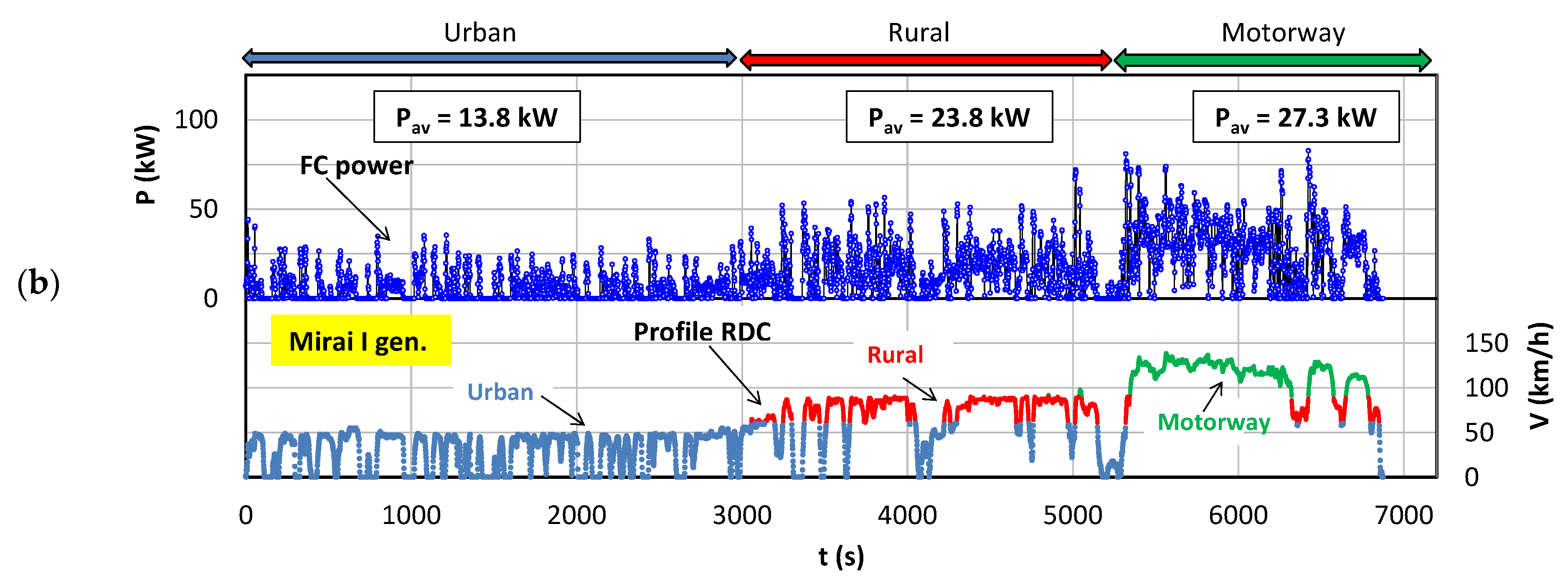
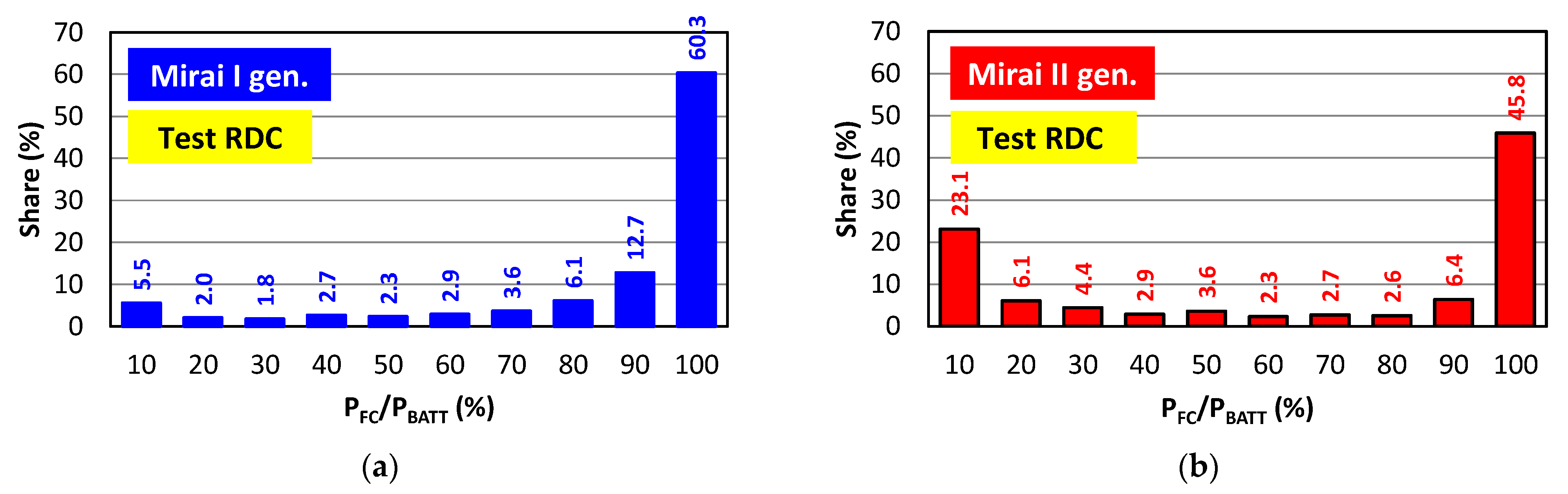
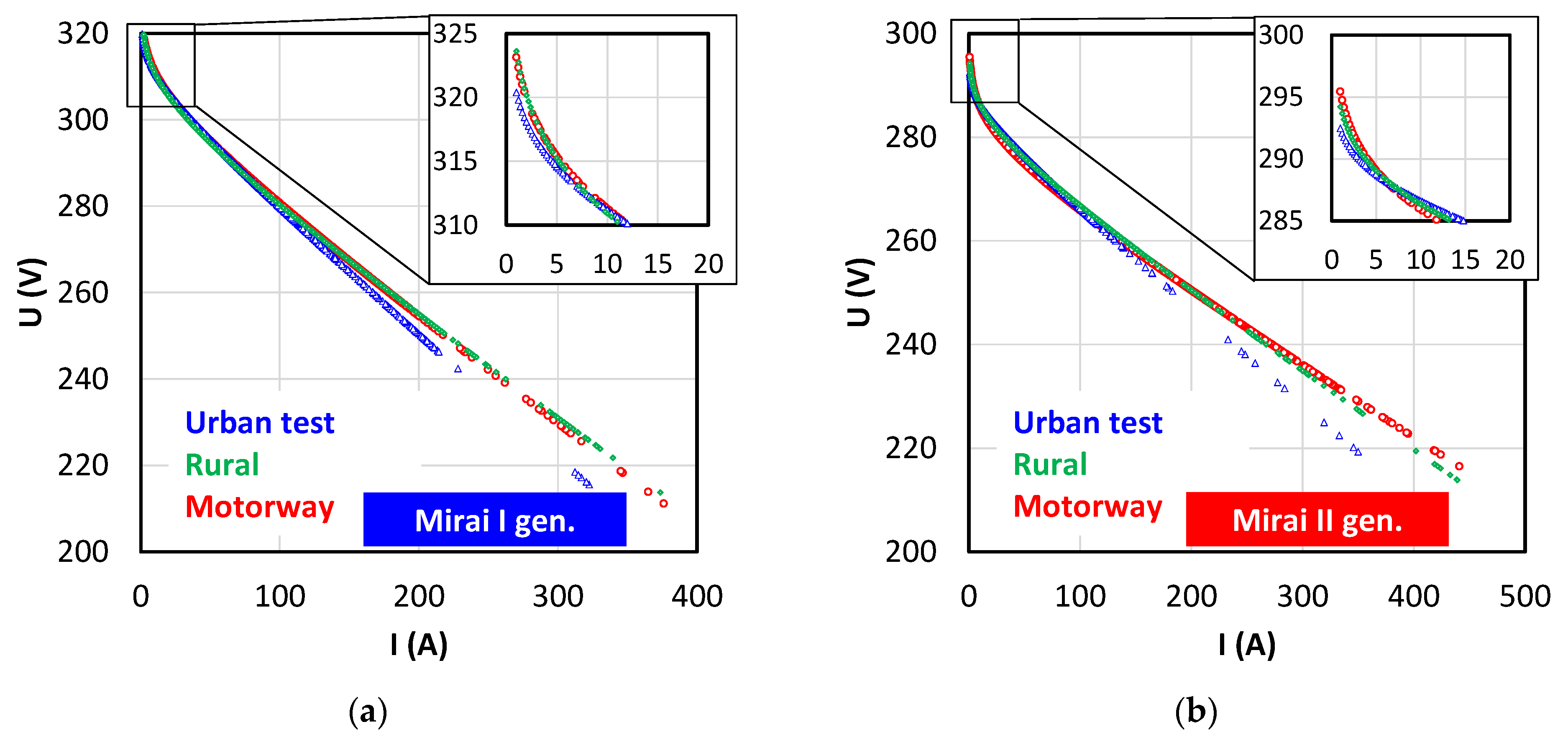
5.2. Fuel Cells Analysis
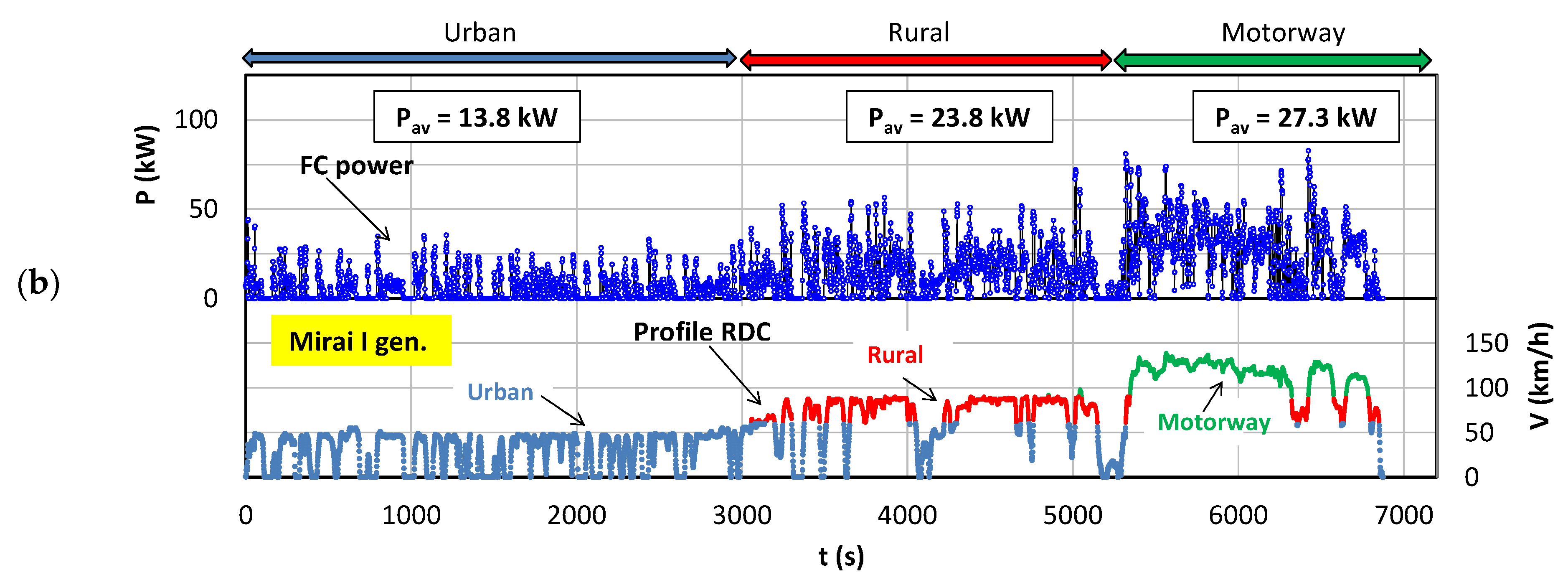
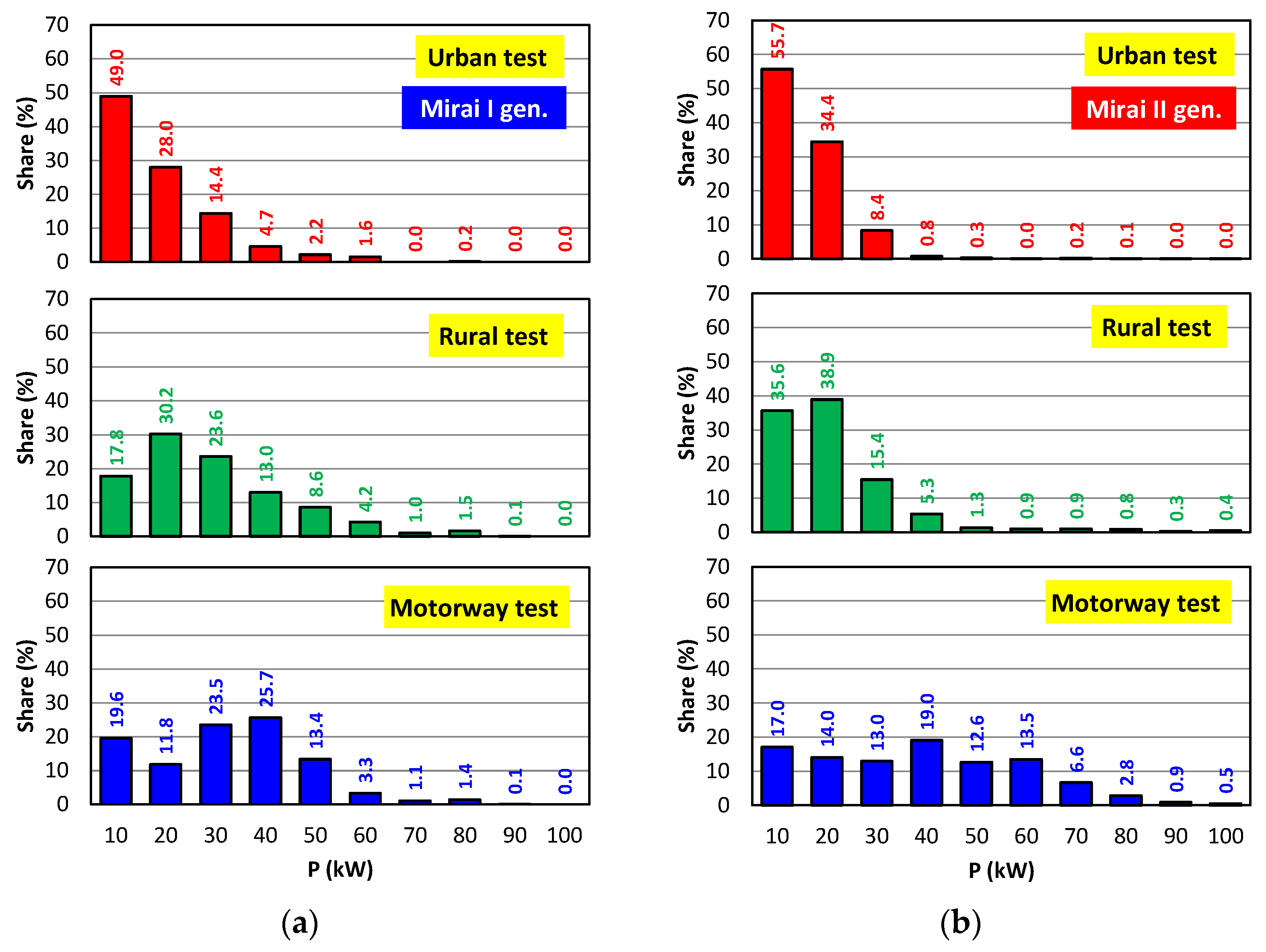
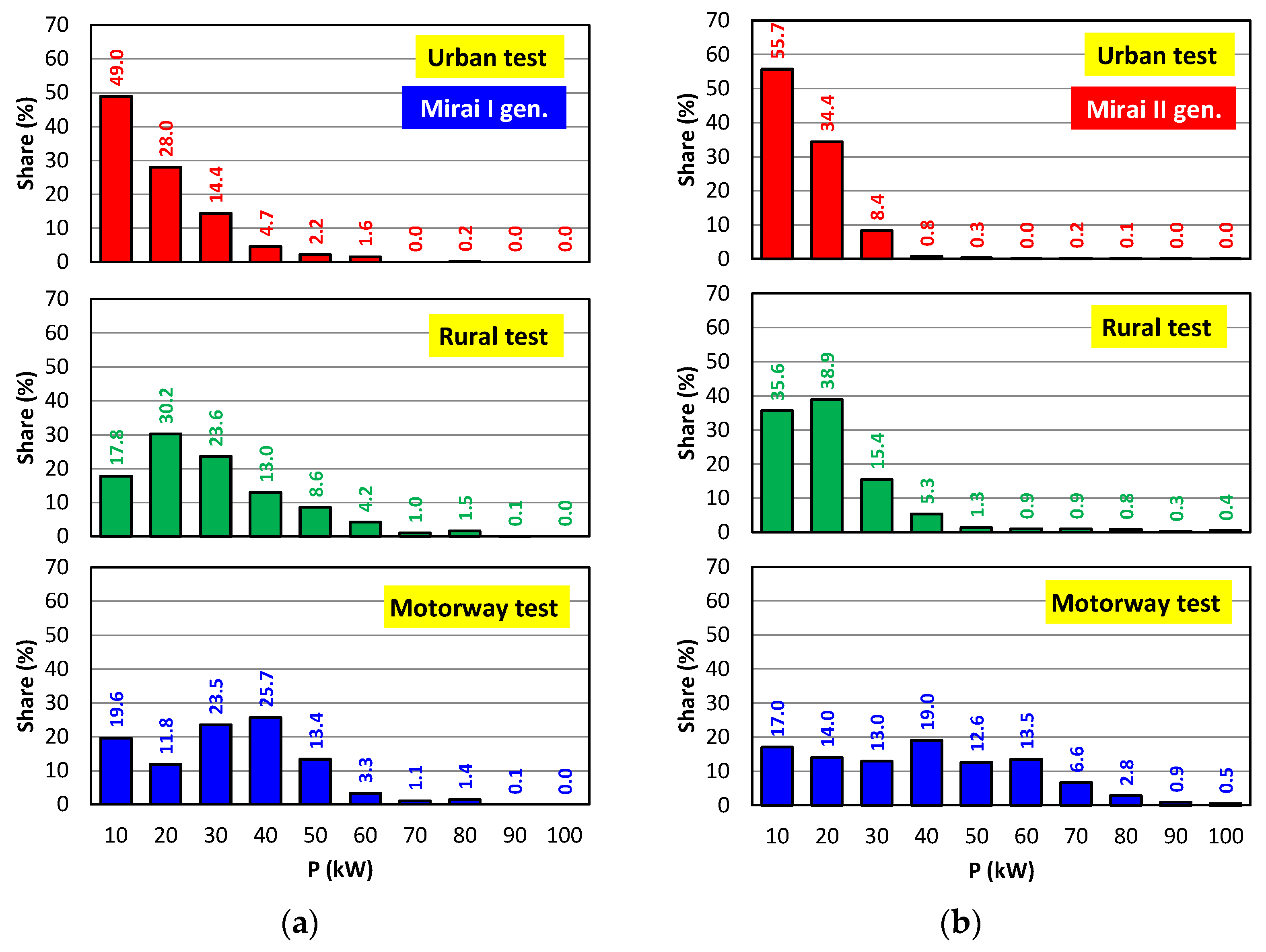
- In the urban section: with power of up to 10 kW;
- In the rural section: with power of up to 20 kW;
- In the motorway section: with power of up to 30–40 kW.
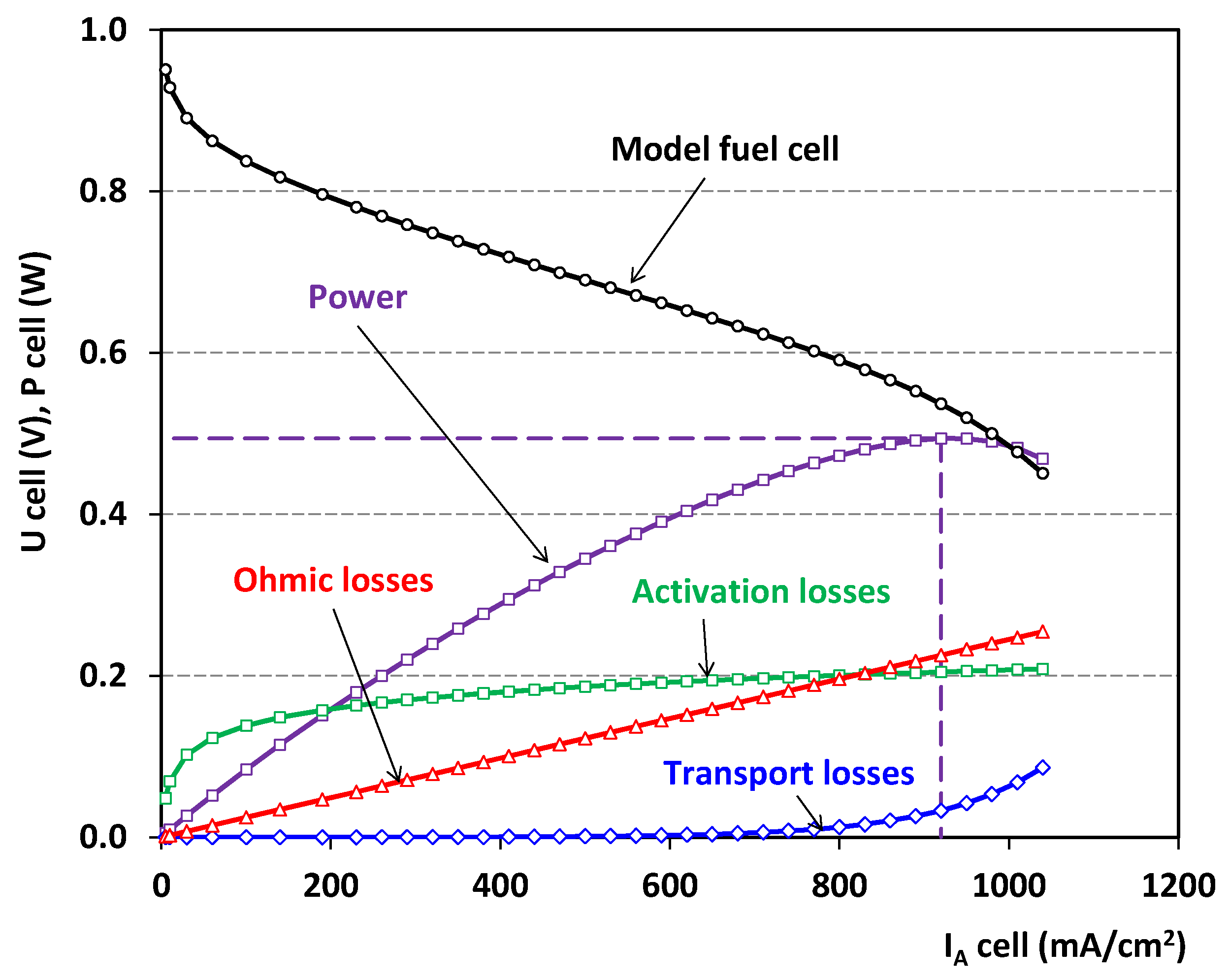
5.3. Modeling and Analysis of a Fuel Cell Stack Losses
6. Conclusions
- The fuel cell in the driving test phases works most often:
- In the urban section: with a power of up to 10 kW;
- In the rural section: with a power of up to 20 kW;
- In the motorway section: with a power of up to 30–40 kW.
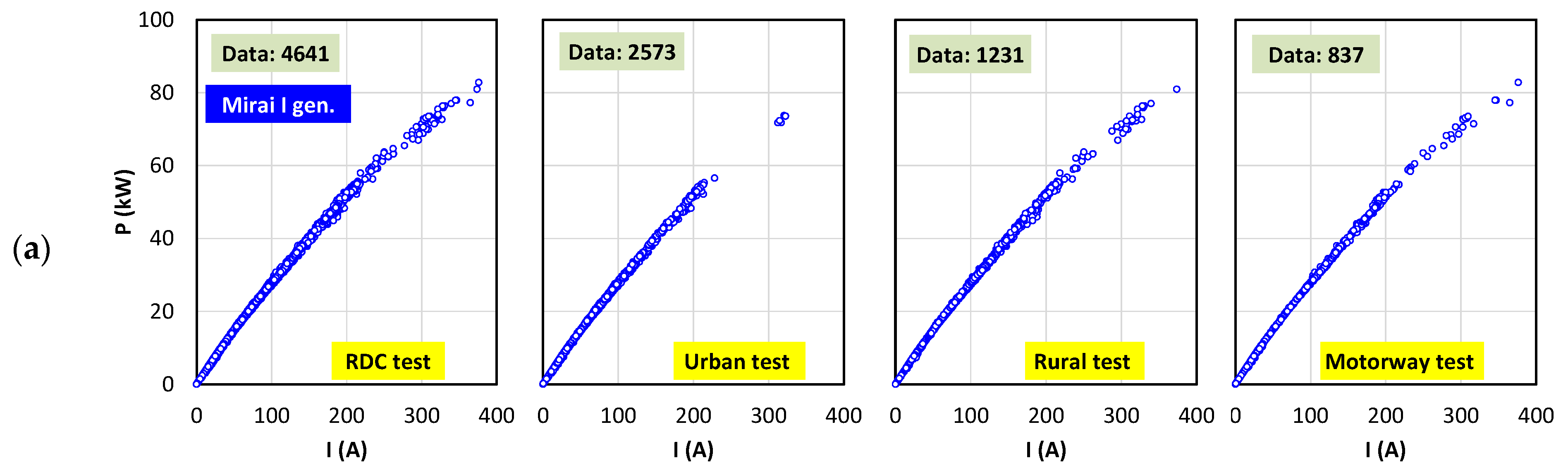
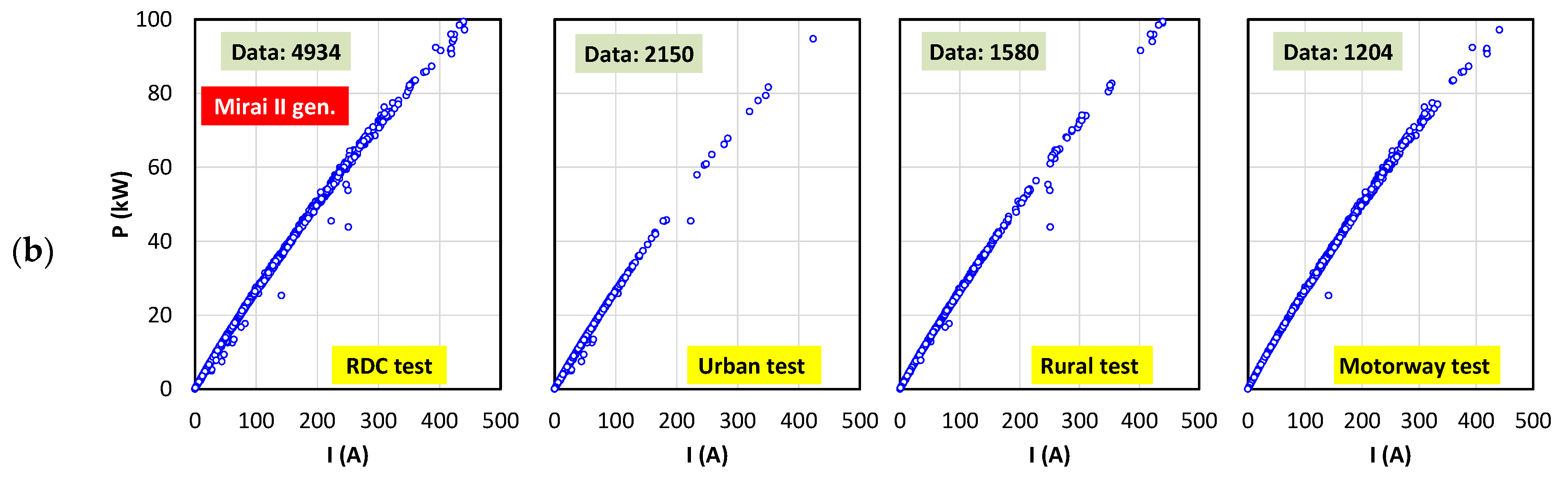
- The share of fuel cells’ power use increased as the maximum driving speed increased in the various phases of the driving test. In the urban phase, this power was on average 10 kW. Each subsequent phase of the test (rural and motorway) increased the power demand by an average of 10 kW in each phase. The presented operating conditions of fuel cells indicated that their full power was not utilized, and the maximum power used reached up to 70 kW (in the motorway phase). This was about 70% of the maximum power.
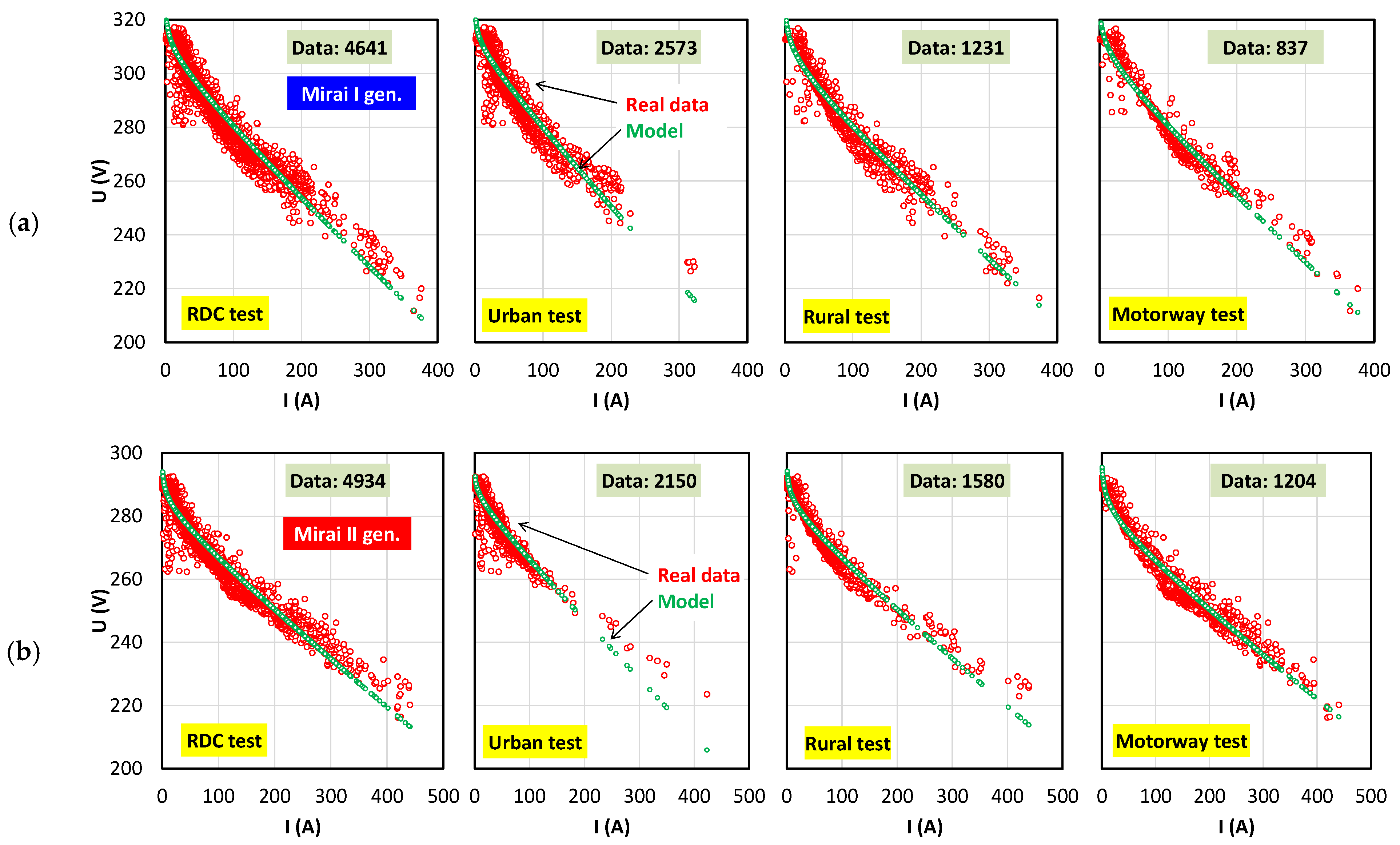
- The presented research methodology shows the possibilities of estimating the fuel cells’ voltage losses. It is possible to determine each component of these losses, but the mass transport losses require the fuel cells to be under maximum load to be measured properly (which is difficult to achieve in the RDC drive test due to its limitations).
- The analysis of fuel cell losses showed the maximum values of activation voltage losses when cells were placed under high load (for both generations). The voltage of resistive losses reached its maximum in urban driving conditions, when the fuel cells were under a small load.
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Proposal for a Directive of the European Parliament and of the Council Amending Directive (EU) 2018/2001 of the European Parliament and of the Council, Regulation (EU) 2018/1999 of the European Parliament and of the Council and Directive 98/70/EC of the European Parliament and of the Council as Regards the Promotion of Energy from Renewable Sources, and Repealing Council Directive (EU) 2015/652. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/?uri=CELEX:52021PC0557 (accessed on 8 May 2022).
- Regulation (EU) 2019/631 of the European Parliament and of the Council of 17 April 2019 Setting CO2 Emission Performance Standards for New Passenger Cars and for New Light Commercial Vehicles, and Repealing Regulations (EC) No 443/2009 and (EU) No 510/2011. Available online: http://data.europa.eu/eli/reg/2019/631/oj (accessed on 4 May 2022).
- Zhang, W.; Wang, J.; Du, S.; Ma, H.; Zhao, W.; Li, H. Energy management strategies for hybrid construction machinery: Evolution, classification, comparison and future trends. Energies 2019, 12, 2024. [Google Scholar] [CrossRef]
- Das, H.S.; Tan, C.W.; Yatim, A.H.M. Fuel cell hybrid electric vehicles: A review on power conditioning units and topologies. Renew. Sustain. Energy Rev. 2017, 76, 268–291. [Google Scholar] [CrossRef]
- Zhou, S.; Fan, L.; Zhang, G.; Gao, J.; Lu, Y.; Zhao, P.; Wen, C.; Shi, L.; Hu, Z. A review on proton exchange membrane multi-stack fuel cell systems: Architecture, performance, and power management. Appl. Energy 2022, 310, 118555. [Google Scholar] [CrossRef]
- Nakagaki, N. The Newly Developed Components for the Fuel Cell Vehicle, Mirai. In SAE Technical; SAE International: Warrendale, PA, USA, 2015. [Google Scholar] [CrossRef]
- Yoshizumi, T.; Kubo, H.; Okumura, M. Development of High-Performance FC Stack for the New MIRAI. In SAE Technical; SAE International: Warrendale, PA, USA, 2021. [Google Scholar] [CrossRef]
- Konno, N.; Mizuno, S.; Nakaji, H.; Ishikawa, Y. Development of Compact and High-Performance Fuel Cell Stack. SAE Int. J. Altern. Powertrains 2015, 4, 123–129. [Google Scholar] [CrossRef]
- Commission Implementing Regulation (EU) 2019/1840 of 31 October 2019 Amending Implementing Regulation (EU) 2017/1153 as Regards the Reporting of WLTP CO2 Values for Certain Categories of New Passenger Cars and Adjusting the Input Data for the Correlation Tool. Available online: http://data.europa.eu/eli/reg_impl/2019/1840/oj (accessed on 8 May 2022).
- Toyota Mirai. Available online: https://www.techdoc-toyota.com (accessed on 6 May 2022).
- Hyundai Nexo Blue. Available online: https://www.hyundai.com/content/dam/hyundai/ww/en/images/footer/downloads/eco/e-brochure/nexo-fe-lhd-ebrochure-2019.pdf (accessed on 6 May 2022).
- Honda Leverages Older Name for New FCV: Clarity Fuel Cell Makes Its Debut at Tokyo; 435-Mile Range on JC08. Available online: https://www.greencarcongress.com/2015/10/20151027-clarity.html (accessed on 7 May 2022).
- Luo, Y.; Wu, Y.; Li, B.; Mo, T.; Li, Y.; Feng, S.-P.; Qu, J.; Chu, P.K. Development and application of fuel cells in the automobile industry. J. Energy Storage 2021, 42, 103124. [Google Scholar] [CrossRef]
- Hong, B.K.; Kim, S.H. Recent advances in fuel cell electric vehicle technologies of Hyundai. ECS Trans. 2018, 86, 3–11. [Google Scholar] [CrossRef]
- Enomoto, K.; Ida, A.; Harada, T.; Takeuchi, H. Development of Safety Performance for FC Stack in the New Toyota FCEV. In SAE Technical; SAE International: Warrendale, PA, USA, 2022. [Google Scholar] [CrossRef]
- Opel Begins Production and Deliveries of Hydrogen Vivaro van. Available online: https://www.greencarcongress.com (accessed on 6 May 2022).
- Bernier, A. Hyvia Exhibits the Renault Master Van H2-TECH. Available online: https://www.world-hydrogen-summit.com (accessed on 3 August 2022).
- Walters, M.; Wick, M.; Tinz, S.; Ogrzewalla, J.; Sehr, A.; Pischinger, S. Fuel cell system development: A strong influence on FCEV performance. SAE Int. J. Altern. Powertrains 2018, 7, 335–350. [Google Scholar] [CrossRef]
- Wurzenberger, J.C.; Rašić, D.; Tavcar, G.; Glatz, T.; Mele, I.; Katrasnik, T. FCEV Performance Assessment—Electrochemical Fuel Cell and Battery Modelling on Vehicle Level. In SAE Technical; SAE International: Warrendale, PA, USA, 2020. [Google Scholar] [CrossRef]
- Bagherabadi, K.M.; Skjong, S.; Pedersen, E. Dynamic modelling of PEM fuel cell system for simulation and sizing of marine power systems. Int. J. Hydrog. Energy 2022, 47, 17699–17712. [Google Scholar] [CrossRef]
- Zhang, G.; Wu, L.; Qin, Z.; Wu, J.; Xi, F.; Mou, G.; Wang, Y.; Jiao, K. A comprehensive three-dimensional model coupling channel multi-phase flow and electrochemical reactions in proton exchange membrane fuel cell. Adv. Appl. Energy 2021, 2, 100033. [Google Scholar] [CrossRef]
- Liu, Y.; Dirkes, S.; Kohrn, M.; Wick, M.; Pischinger, S. A high-fidelity real-time capable dynamic discretized model of proton exchange membrane fuel cells for the development of control strategies. J. Power Sources 2022, 537, 231394. [Google Scholar] [CrossRef]
- Bressel, M.; Hilairet, M.; Hissel, D.; Bouamama, B.O. Model-based aging tolerant control with power loss prediction of Proton Exchange Membrane Fuel Cell. Int. J. Hydrog. Energy 2018, 45, 11242–11254. [Google Scholar] [CrossRef]
- Barbir, F. Chapter 3—Fuel Cell Electrochemistry. In PEM Fuel Cells; Barbir, F., Ed.; Academic Press: Cambridge, MA, USA, 2005; pp. 33–72. [Google Scholar] [CrossRef]
- Larminie, J.; Dicks, A. Fuel Cell Systems Explained, 3rd ed.; John Wiley & Sons Ltd.: Hoboken, NJ, USA, 2018. [Google Scholar] [CrossRef]
- Pielecha, I.; Szałek, A.; Tchorek, G. Two generations of hydrogen powertrain—an analysis of the operational indicators in Real Driving Conditions (RDC). Energies 2022, 15, 4734. [Google Scholar] [CrossRef]
- Pielecha, J.; Skobiej, K.; Kurtyka, K. Exhaust emissions and energy consumption analysis of conventional, hybrid, and electric vehicles in Real Driving Cycles. Energies 2020, 13, 6423. [Google Scholar] [CrossRef]
- Andrych-Zalewska, M.; Chlopek, Z.; Merkisz, J.; Pielecha, J. research on exhaust emissions in dynamic operating states of a combustion engine in a Real Driving Emissions test. Energies 2021, 14, 5684. [Google Scholar] [CrossRef]
- Ferreira, M.E.; Oliveira, M.C.; Menezes, L.F.; Andrade-Campos, A. 3–Numerical Optimization Strategies for Springback Compensation in Sheet Metal Forming. In Woodhead Publishing Reviews: Mechanical Engineering Series, Computational Methods and Production Engineering; Davim, J.P., Ed.; Woodhead Publishing: Sawston, UK, 2017; pp. 51–82. [Google Scholar] [CrossRef]
- Arora, J.S. Introduction to Optimum Design, 4th ed.; Academic Press: Cambridge, MA, USA, 2017. [Google Scholar] [CrossRef]
- Facó, J.L.D. A generalized reduced gradient algorithm for solving large-scale discrete-time nonlinear optimal control problems. IFAC Proc. Vol. 1989, 22, 45–50. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Parameter | Mirai I Gen. | Mirai II Gen. |
|---|---|---|---|
| Vehicle | Mass | 1850 kg | 2415 kg |
| Top speed | 179 km/h | 175 km/h | |
| Acceleration 0 to 60 mph | 9.6 s | 9.2 s | |
| Range (homologation cycle) | Approx. 483 km | 650 km | |
| Fuel cell | Type | PEM (polymer electrolyte) | |
| Power | 114 kW (155 HP) | 128 kW (174 HP) | |
| Power density | 2.8 kW/kg; 3.5 kW/dm3 (Excl. end plates) | 5.4 kW/kg; 5.4 kW/dm3 (Excl. end plates) | |
| Number of cells | 370 | 330 | |
| Electric motor | Type | Permanent magnet synchronous | |
| Peak power | 123 kW at 4500 rpm | 134 kW at 6940 rpm | |
| Maximum torque | 335 N·m | 300 N·m | |
| Maximum speed | 13,500 rpm | 16,500 rpm | |
| Battery | Type | Nickel metal hydride (Ni-MH) | Li-Ion |
| Capacity | 6.5 Ah | 4 Ah | |
| Output | 25.5 kW × 10 s | 31.5 kW × 10 s | |
| Nominal voltage | 244.8 V (7.2 V × 34) | 310.8 V (3.7 V × 84) | |
| Energy | 1.59 kWh | 1.24 kWh | |
| Hydrogen storage | Internal volume | 122.4 dm3 | 142.2 dm3 |
| Nominal pressure | 70 MPa | 70 MPa | |
| Mass | 4.6 kg | 5.6 kg | |
| Parameter | Mirai I Gen. | Mirai II Gen. | Diff. [%] | Requirements |
|---|---|---|---|---|
| Urban route [km] | 32.93 | 35.08 | 6.1 | >16 |
| Rural route [km] | 37.50 | 34.81 | 7.2 | >16 |
| Highway route [km] | 42.99 | 44.26 | 2.9 | >16 |
| Total route [km] | 113.43 | 114.15 | 0.6 | >48 |
| Share of urban route [%] | 29.03 | 30.73 | 5.5 | 29–44 |
| Share of rural route [%] | 33.06 | 30.49 | 7.8 | 33 ± 10 |
| Share of highway route [%] | 37.90 | 38.77 | 2.2 | 33 ± 10 |
| Average speed in urban route [km/h] | 30.23 | 29.51 | 2.4 | 15–40 |
| Share of standstill in urban route [%] | 22.40 | 19.88 | 11.3 | 6–30 |
| Test time [min] | 114.57 | 119.49 | 4.1 | 90–120 |
| Parameter | Symbol | Mirai I Gen. | Mirai II Gen. |
|---|---|---|---|
| Open circuit voltage | Eoc | 0.8 | 0.8 |
| Activation overvoltage | A | 0.00854 | 0.00854 |
| Area-specific resistance | r | 22.7966 | 22.7966 |
| Constants in the mass-transfer overvoltage Equation (5) | m | 0.00097 | 0.00097 |
| Constants in the mass-transfer overvoltage Equation (5) | n | 0.62917 | 0.62917 |
| Active area of stock | ast | 52,056.2 | 52,056.2 |
| Number of cells in the fuel stack | nst | 370 | 330 |
| Parameter | Mirai I Gen. | Mirai II Gen. | ||||||
|---|---|---|---|---|---|---|---|---|
| All Test | Urban | Rural | Motorway | All test | Urban | Rural | Motorway | |
| Eoc | 7.547 × 10−1 | 7.782 × 10−1 | 7.364 × 10−1 | 7.469 × 10−1 | 8.054 × 10−1 | 8.277 × 10−1 | 8.266 × 10−1 | 7.919 × 10−1 |
| A | 1.050 × 10−2 | 7.883 × 10−3 | 1.256 × 10−2 | 1.145 × 10−2 | 8.395 × 10−3 | 5.610 × 10−3 | 8.923E × 10−3 | 1.104 × 10−2 |
| r | 3.370 × 101 | 3.833 × 101 | 3.098 × 101 | 3.246 × 101 | 2.292 × 101 | 2.597 × 101 | 2.308 × 101 | 2.333 × 101 |
| m | 1.000 × 10−7 | 1.000 × 10−7 | 1.000 × 10−7 | 1.000 × 10−7 | 9.697 × 10−4 | 1.000 × 10−7 | 2.112 × 10−3 | 1.367 × 10−2 |
| n | 8.654 × 10−1 | 8.637 × 10−1 | 8.677 × 10−1 | 8.609 × 10−1 | 6.292 × 10−1 | 6.352 × 10−1 | 6.289 × 10−1 | 7.171 × 10−2 |
| ast | 5.206 × 104 | 5.206 × 104 | 5.206 × 104 | 5.206 × 104 | 5.179 × 104 | 4.794 × 104 | 5.127 × 104 | 5.927 × 104 |
| nst | 3.712 × 102 | 3.712 × 102 | 3.710 × 102 | 3.711 × 102 | 3.284 × 102 | 3.295 × 102 | 3.195 × 102 | 3.286 × 102 |
| Parameter | Mirai I Gen. | Mirai II Gen. | ||||||
|---|---|---|---|---|---|---|---|---|
| All Test | Urban | Rural | Motorway | All Test | Urban | Rural | Motorway | |
| 109,827 | 59,591 | 29,249 | 18,317 | 51,588 | 19,616 | 15,967 | 13,878 | |
| 26.9763 | 23.1601 | 23.7609 | 21.8845 | 10.4556 | 9.1240 | 10.1062 | 11.5271 | |
| Parameter | Mirai I Gen. | Mirai II Gen. | ||||
|---|---|---|---|---|---|---|
| Urban | Rural | Motorway | Urban | Rural | Motorway | |
| Open circuit voltage Eoc | min | max | middle | min | middle | max |
| Activation voltage losses | min | middle | max | middle | min | max |
| Resistive voltage losses | max | min | middle | max | middle | min |
| Mass transport voltage losses | min | min | min | min | max | max |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pielecha, I. Modeling of Fuel Cells Characteristics in Relation to Real Driving Conditions of FCHEV Vehicles. Energies 2022, 15, 6753. https://doi.org/10.3390/en15186753
Pielecha I. Modeling of Fuel Cells Characteristics in Relation to Real Driving Conditions of FCHEV Vehicles. Energies. 2022; 15(18):6753. https://doi.org/10.3390/en15186753
Chicago/Turabian StylePielecha, Ireneusz. 2022. "Modeling of Fuel Cells Characteristics in Relation to Real Driving Conditions of FCHEV Vehicles" Energies 15, no. 18: 6753. https://doi.org/10.3390/en15186753
APA StylePielecha, I. (2022). Modeling of Fuel Cells Characteristics in Relation to Real Driving Conditions of FCHEV Vehicles. Energies, 15(18), 6753. https://doi.org/10.3390/en15186753