

Optimal Microgrid System Operating Strategy Considering Variable Wind Power Outputs and the Cooperative Game among Subsystem Operators


Abstract
:1. Introduction
- Different from most studies that research the optimal operation strategy of the MGS, this paper not only focuses on the overall optimal scheduling of the MGS, but also pays attention to the cooperative game among the internal subsystem operators. This paper expands the research framework of the MGS and has a certain innovation of the research vision.
- A two-stage operation optimization method is proposed in this paper, which includes the BRO model in the overall scheduling stage and the NCG model in the internal cost allocation stage. The two-stage operation optimization method can resist the disturbance of the WPOU and realize the reasonable cost allocation among the subsystem operators, so as to ensure the economic and stable operation of the MGS.
- Five cases are designed and compared in the simulation. On the one hand it verifies the advantages of introducing P2G in improving the economy of system operation. On the other hand, it reveals the effectiveness of the two-stage operation optimization method, which can achieve the robust operation of the overall MGS and the reasonable cost allocation scheme among the subsystem operators.
2. System Description and Components Modeling
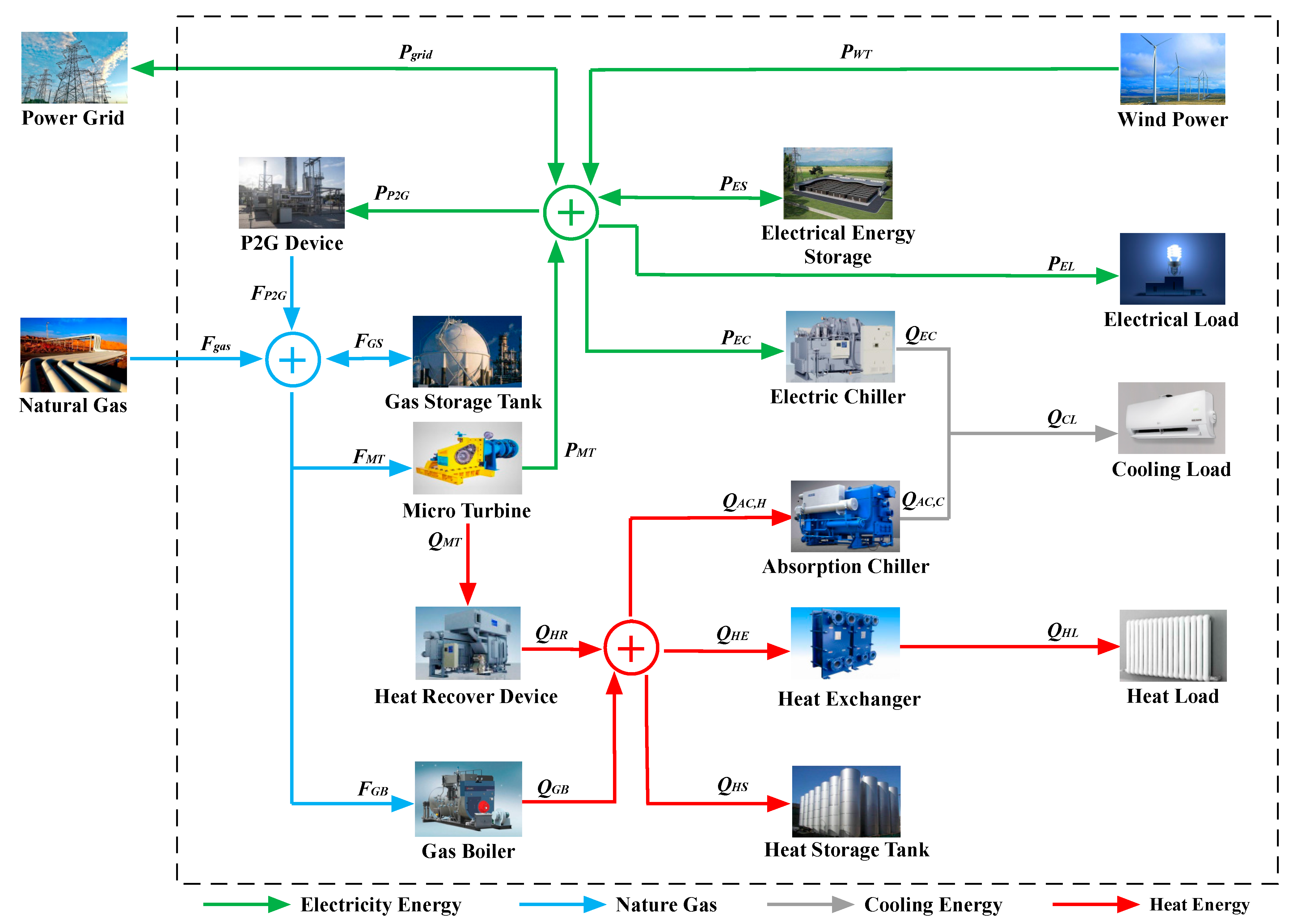
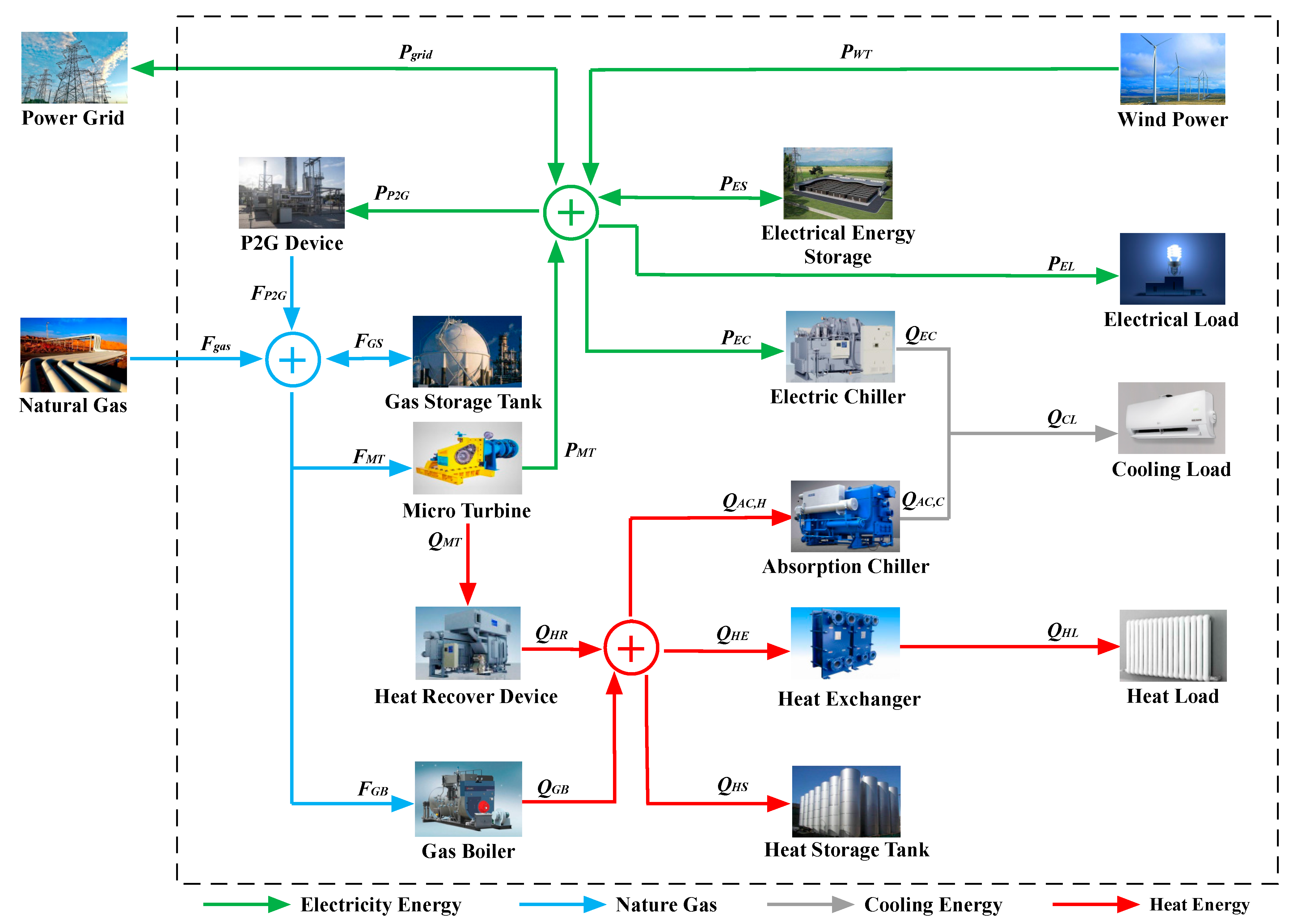
2.1. System Description
2.1.1. Overall Description of the MGS
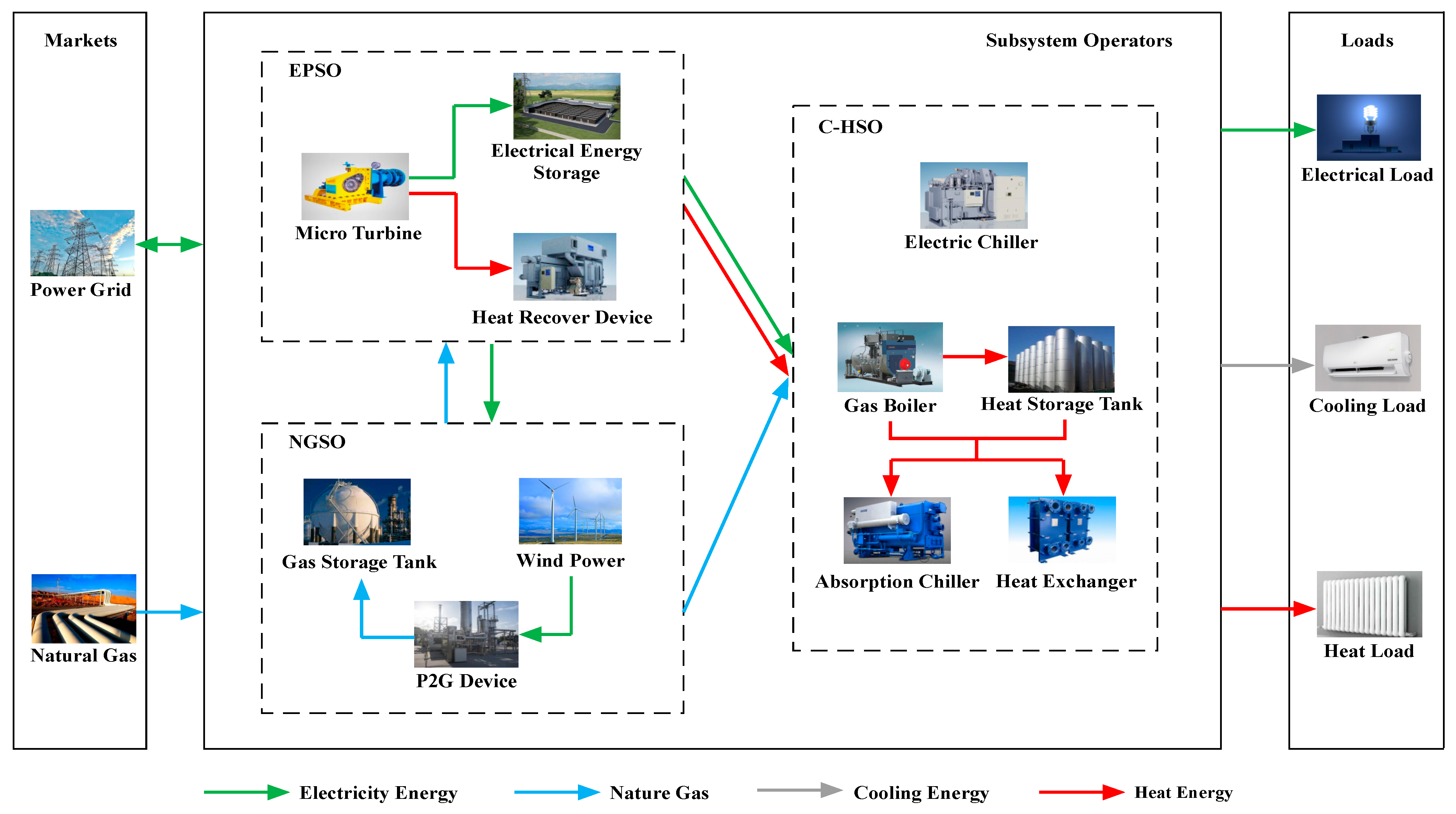
2.1.2. Introduction of the Subsystem Operators in the MGS
2.2. Components Modeling
- P2G device
- 2.
- Microturbine and heat recovery device
- 3.
- Gas boiler, electrical chillers and absorption chillers
- 4.
- Energy storage devices
3. The Two-Stage Operation Optimization Method
3.1. The BRO Model in the Overall Scheduling Stage
3.1.1. Objective Function
- Day-ahead scheduling level (DSL): In each time interval, DSL determines the amount of trading power declared by the external PG, and the amount of trading NG reported to the NGPN based on the predicted wind power output to minimize the total cost of the system.
- Real-time adjusting level (RAL): Due to the error of WT output, it is necessary to adjust the flexible resources of the MGS in real-time. Therefore, in order to meet the energy supply and demand balance, the system causes corresponding scheduling costs in RAL. The robustness of the objective function is to optimize the system scheduling result under the worst wind power output error, which causes the largest cost in RAL.
3.1.2. Operational Constraints
- Constraints of DSL
- (1)
- energy balance constraints:
- (2)
- power exchange with PG and NGPN constraints:
- (3)
- wind power curtailment constraints:
- 2.
- Constraints of RAL
3.1.3. Formulations for Wind Power Forecasting Error Uncertainties
3.2. The NCG Model in the Internal Cost Allocation Stage
3.2.1. A Brief Introduction of Cooperative Game
- 1.
- A characteristic function indicates the maximum earnings that the coalition can achieve no matter what kind of strategy is adopted by the players outside the coalition .
- 2.
- An allocation vector is a function value that describes the earnings of players in a cooperative game.
- 3.
- The following assumptions are true in the cooperative game [34]:
3.2.2. The Nucleolus-Based Cooperative Game Model
- It satisfies individual rationality and coalitional rationality;
- Each cooperative game problem has one and only one nucleolus;
- The distribution results of players in symmetrical position are the same.
4. Model Solving Method
4.1. BRO Model Transformation
- 1.
- Transformation of the MP of the BRO model
- (1)
- Introduce variable , which satisfies the following condition:
- (2)
- Then the original objective function can be transformed into the objective function of the MP:
- (3)
- Constraints of the MP:
- 2.
- Transformation of the SP of the BRO model
- (1)
- According to the scheduling results of the MP, the objective function of the SP can be formulated as:
- (2)
- Constraints of the SP:
4.2. NCG Model Transformation
- 1.
- Transformation of the SP of the NCG model
- 2.
- Transformation of the MP of the NCG model
- (1)
- Introduce variable , which satisfies the following condition:
- (2)
- Then, the original objective function can be transformed into the objective function of the MP:
4.3. Model Solving Procedure
- (1)
- , the error tolerance of the MP is defined as ;
- (2)
- Solve the MP of the BRO model and obtain the optimal operation result in DSL;
- (3)
- According to the operation result in DSL, solve the SP of the BRO model and obtain and ;
- (4)
- Based on , add the constraints of the MP of the BRO model,
- (5)
- If , enter (6), otherwise return to (2);
- (6)
- Finish the solving procedure of the overall scheduling stage and output the optimal objective value and the operation result of the MP of the BRO model.
- (7)
- ,, , , , the error tolerance of the SP of the NCG model is defined as , and error tolerance of the MP of the NCG model is defined as ;
- (8)
- Solve the SP of the NCG model and obtain the sub-coalition with highest dissatisfaction;
- (9)
- If , enter (10), otherwise, and return to (8);
- (10)
- Set to , record the value of , and ;
- (11)
- Solve the MP of the NCG model and set to , update x;
- (12)
- If , enter (13), otherwise, , and return to (8);
- (13)
- Finish the solving procedure of the internal cost allocation stage and output the optimal allocation .
5. Simulations
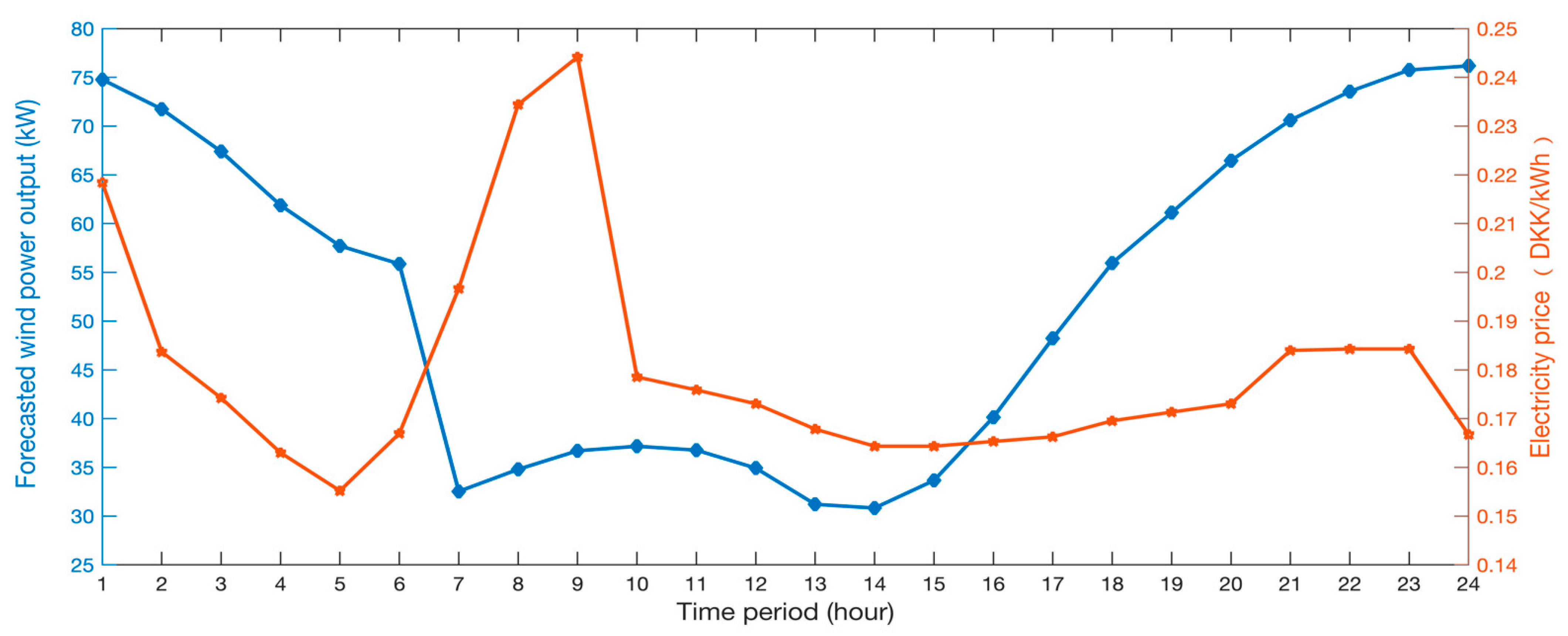
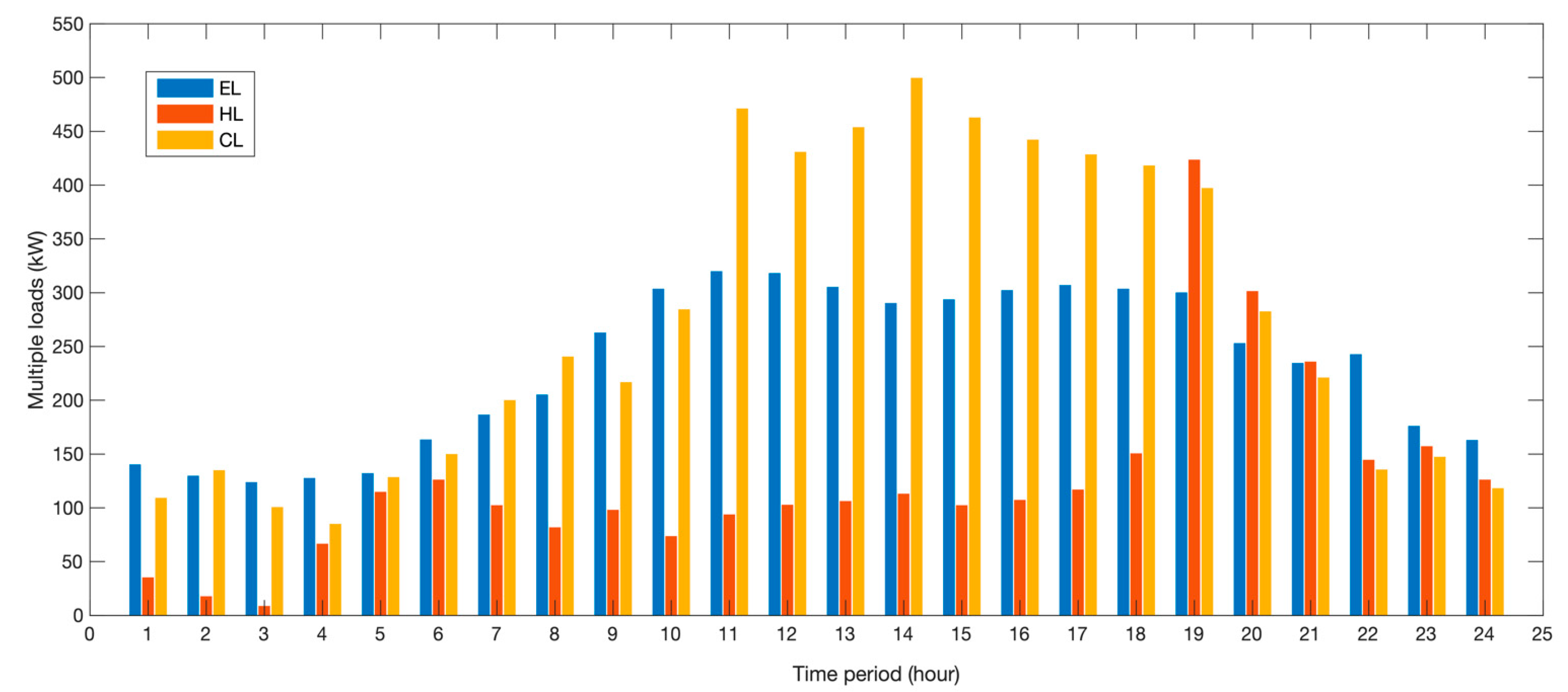
5.1. Data Description
5.2. Scenario Settings
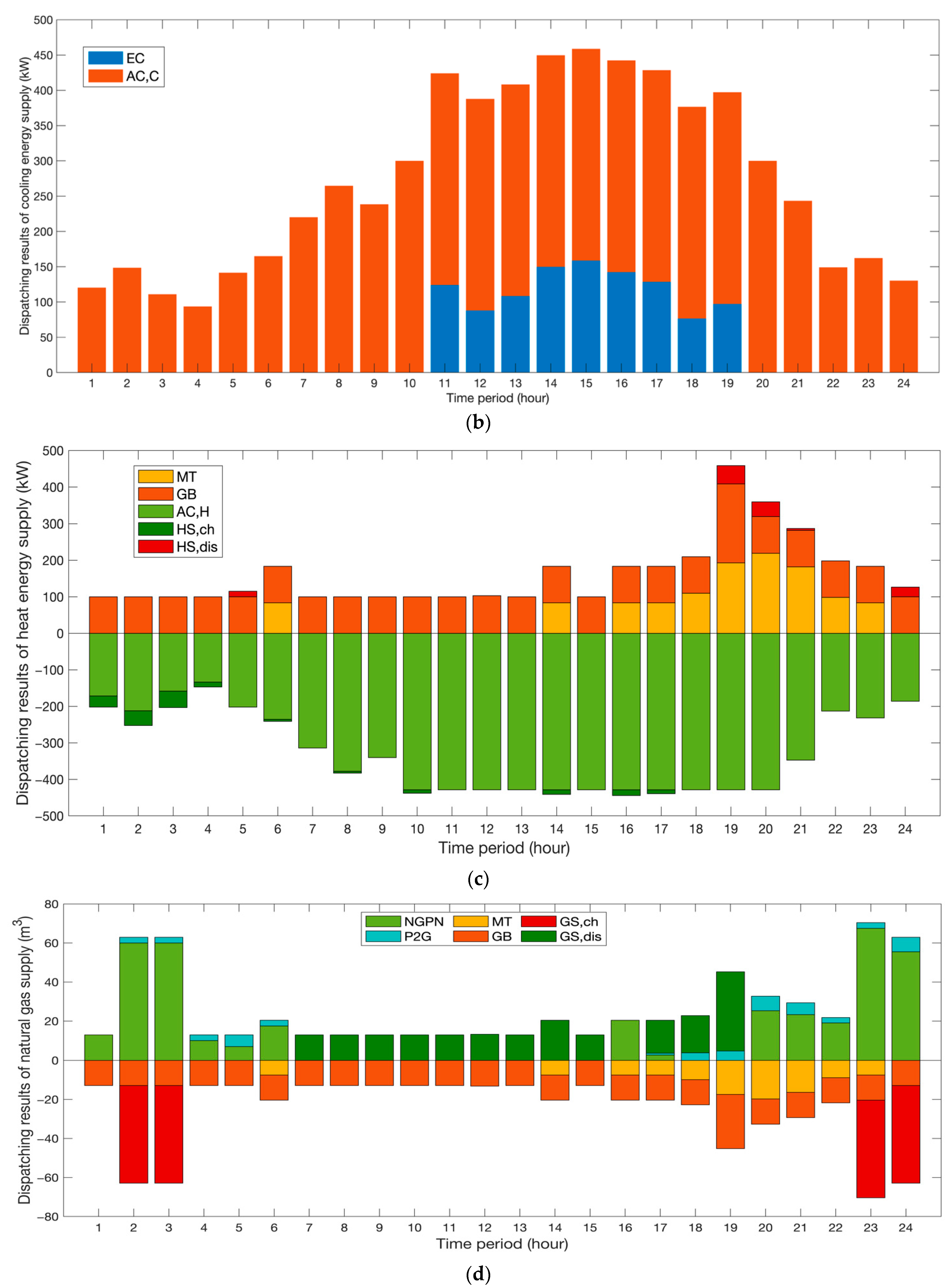
5.3. Operation Results Analysis
- Optimization results of Case 1
- 2.
- Benefit verification for integrating P2G into the MGS
- 3.
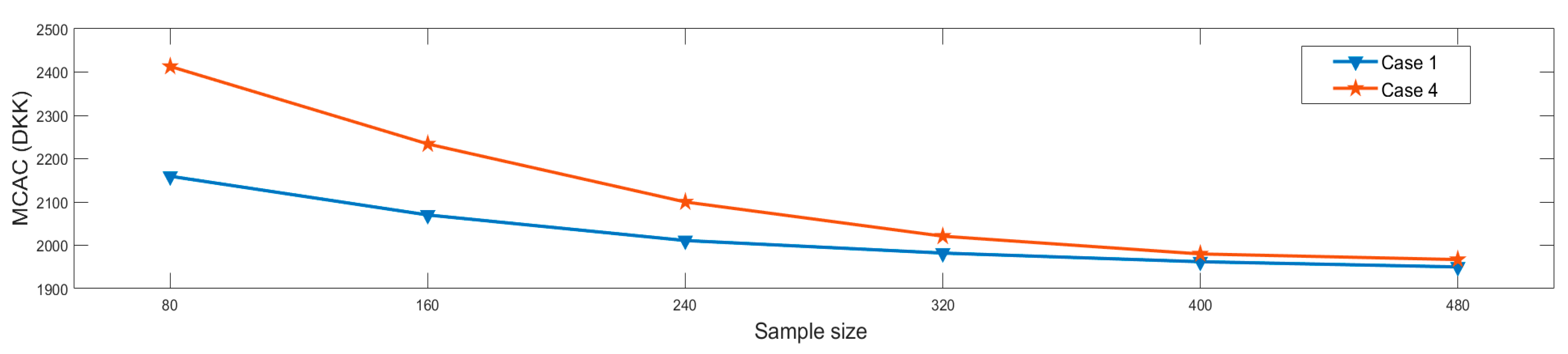
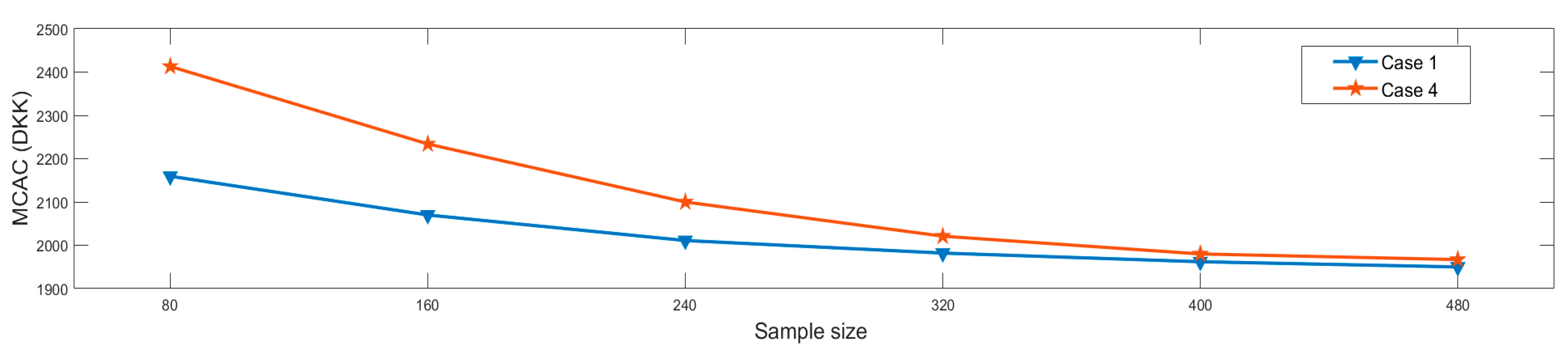
- Advantage verification for the BRO model
- 4.
- Effectiveness verification for the NCG model
6. Conclusions
- The introduction of P2G into the MGS can reduce the operation cost of the system. The main reason is that P2G can convert the additional power into NG when the electricity price is low, which reduces the amount of NG purchased by the system from the NGPN so as to reduce the operation cost.
- In the overall scheduling stage, compared with the SO model, the BRO model has better robustness and lower computational complexity. When the sample size is small, the SO model is often unable to resist the wind power output errors, resulting in a higher optimal objective value. When the sample size is large, the SO model will consider too many scenarios, resulting in a rapid increase in its computational complexity.
- In the internal cost allocation stage, when the subsystems operate cooperatively, it can not only ensure the overall operation stability of the MGS but also bring lower operation costs. In this scenario, the NCG model proposed in this paper can realize the reasonable cost allocation among all subsystems, reduce their operation costs and increase their willingness to cooperate.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| Constants: | |
| the price of electricity in power grid | |
| the price of natural gas | |
| the heat value of natural gas | |
| the power efficiency of P2G | |
| the power efficiency of microturbine | |
| the coefficient of performance for microturbine | |
| the coefficient of performance for gas boiler | |
| the coefficient of performance for electrical chiller | |
| the coefficient of performance for absorption chiller | |
| the recovery efficiency of heat recovery device | |
| the exchange efficiency of heat exchange device | |
| the initial residual energy of electrical storage device | |
| the minimum energy storage limit of electrical storage device | |
| the rated capacity of electrical storage device | |
| the charging efficiency of electrical storage device | |
| the discharging efficiency of electrical storage device | |
| the predicted output of wind turbine | |
| the actual output of wind turbine during period t | |
| the wind power abandonment punishment | |
| Variables: | |
| the wind power abandonment at time interval t | |
| the electricity exchanged with external power grid at time interval t | |
| the natural gas purchased from the external pipeline network at time interval t | |
| the power of P2G at time interval t | |
| the microturbine generation at time interval t | |
| the natural gas consumption of microturbine at time interval t | |
| the natural gas consumption of gas boiler at time interval t | |
| the gas boiler heat energy generation at time interval t | |
| the electrical chiller cooling energy generation at time interval t | |
| / | the charge/discharge rate of electrical storage device at time interval t |
| the energy level of electrical storage device at time interval t | |
| the electrical load at time interval t | |
| the cooling load at time interval t | |
| the heating load at time interval t | |
| the wind power output error at time interval t | |
| the vector of adjusted outputs of the flexibility resources in RAL at time interval t | |
| the uncertainty set of wind power output errors | |
| , , , , , , , , , and are binary variables, which indicate the operation state. 1 if the device is in the released status during period t; 0 otherwise. | |
References
- Adefarati, T.; Bansal, R.C. Reliability, economic and environmental analysis of a microgrid system in the presence of renewable energy resources. Appl. Energy 2019, 236, 1089–1114. [Google Scholar] [CrossRef]
- Lekvan, A.A.; Habibifar, R.; Moradi, M.; Khoshjahan, M.; Nojavan, S.; Jermsittiparsert, K. Robust Optimization of Renewable-Based Multi -Energy Micro-Grid Integrated with Flexible Energy Conversion and Storage Devices. Sustain. Cities Soc. 2021, 64, 102532. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, F.; Li, Y.; Wang, Y. An Improved Two-Stage Robust Optimization Model for CCHP-P2G Microgrid System Considering Multi-Energy Operation under Wind Power Outputs Uncertainties. Energy 2021, 223, 120048. [Google Scholar] [CrossRef]
- Sun, Q.; Chen, Y.; Sun, Q.; Chen, Y. Multi-energy flow calculation method for we-energy based energy internet. In Proceedings of the IEEE International Conference on Energy Internet, Beijing, China, 17–21 April 2017. [Google Scholar]
- Xing, J.; Sun, S.; Cheng, Y.; Liu, Y.; Yu, P.; Wang, Y.; Wang, S.; Zhang, X.; Zhou, G.; Wang, N.; et al. Optimal Dispatching of Integrated Energy System Based on Multi-Energy Complementation. J. Phys. Conf. Ser. 2022, 2195, 012014. [Google Scholar] [CrossRef]
- Huang, Y.; Wang, Y.; Liu, N. A Two-Stage Energy Management for Heat-Electricity Integrated Energy System Considering Dynamic Pricing of Master-Slave Game and Operation Strategy Optimization. Energy 2021, 244, 122576. [Google Scholar] [CrossRef]
- Wang, Y.L.; Huang, Y.J.; Wang, Y.D.; Zeng, M.; Yu, H.Y.; Li, F.; Zhang, F. Optimal scheduling of the RIES considering time-based demand response programs with energy price. Energy 2018, 164, 773–793. [Google Scholar] [CrossRef]
- Li, Y.; Wang, C.; Li, G.; Wang, J.; Zhao, D.; Chen, C. Improving operational flexibility of integrated energy system with uncertain renewable generations considering thermal inertia of buildings. Energy Convers. Manag. 2020, 207, 112526. [Google Scholar] [CrossRef]
- Elsied, M.; Oukaour, A.; Gualous, H.; Hassan, R. Energy management and optimization in microgrid system based on green energy. Energy 2015, 84, 139–151. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, Y.; Huang, Y.; Yang, J.; Ma, Y.; Yu, H.; Zeng, M.; Zhang, F.; Zhang, Y. Operation optimization of regional integrated energy system based on the modeling of electricity-thermal-natural gas network. Appl. Energy 2019, 251, 113410. [Google Scholar] [CrossRef]
- Ju, L.; Zhang, Q.; Tan, Z.; Wang, W.; Xin, H.; Zhang, Z. Multi-Agent-System-Based Coupling Control Optimization Model for Micro-Grid Group Intelligent Scheduling Considering Autonomy-Cooperative Operation Strategy. Energy 2018, 157, 1035–1052. [Google Scholar] [CrossRef]
- Liu, Z.; Yi, Y.; Yang, J.; Tang, W.; Zhang, Y.; Xie, X.; Ji, T. Optimal Planning and Operation of Dispatchable Active Power Resources for Islanded Multi-microgrids under Decentralised Collaborative Dispatch Framework. IET Gener. Transm. Distrib. 2019, 14, 408–422. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, Z.; Cai, C.; Xue, L.; Ma, Y.; Shen, H.; Chen, X.; Liu, L. Research on the Optimization Method of Integrated Energy System Operation with Multi-Subject Game. Energy 2022, 245, 123305. [Google Scholar] [CrossRef]
- Zhu, Z.; Wing Chan, K.; Bu, S.; Zhou, B.; Xia, S. Real-Time Interaction of Active Distribution Network and Virtual Microgrids: Market Paradigm and Data-Driven Stakeholder Behavior Analysis. Appl. Energy 2021, 297, 117107. [Google Scholar] [CrossRef]
- Baron, C.; Al-Sumaiti, A.S.; Rivera, S.R. Impact of Energy Storage Useful Life on Intelligent Microgrid Scheduling. Energies 2020, 13, 957. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, Y.; Tang, L.; Sun, W.; Zhao, H. A stochastic-CVaR optimization model for CCHP micro-grid operation with consideration of electricity market, wind power accommodation and multiple demand response programs. Energies 2019, 12, 3983. [Google Scholar] [CrossRef]
- Kuang, J.; Zhang, C.; Sun, B. Stochastic Dynamic Solution for Off-Design Operation Optimization of Combined Cooling, Heating, and Power Systems with Energy Storage. Appl. Therm. Eng. 2019, 163, 114356. [Google Scholar] [CrossRef]
- Chen, Y.; He, L.; Li, J. Stochastic dominant-subordinate-interactive scheduling optimization for interconnected microgrids with considering wind-photovoltaic-based distributed generations under uncertainty. Energy 2017, 130, 581–598. [Google Scholar] [CrossRef]
- Alizadeh Bidgoli, M.; Ahmadian, A. Multi-Stage Optimal Scheduling of Multi-Microgrids Using Deep-Learning Artificial Neural Network and Cooperative Game Approach. Energy 2022, 239, 122036. [Google Scholar] [CrossRef]
- Nguyen, T.-T.; Ngo, T.-G.; Dao, T.-K.; Nguyen, T.-T.-T. Microgrid Operations Planning Based on Improving the Flying Sparrow Search Algorithm. Symmetry 2022, 14, 168. [Google Scholar] [CrossRef]
- Wang, L.; Li, Q.; Ding, R.; Sun, M.; Wang, G. Integrated scheduling of energy supply and demand in microgrids under uncertainty: A robust multi-objective optimization approach. Energy 2017, 130, 1–14. [Google Scholar] [CrossRef]
- Zhang, C.; Dong, Z.Y.; Xu, Y.; Chen, Y. A two-stage robust operation approach for combined cooling, heat and power system. In Proceedings of the IEEE Conference on Energy Internet and Energy System Integration, Beijing, China, 26–28 November 2017; IEEE: New York, NY, USA, 2017; pp. 1–6. [Google Scholar]
- Lv, C.; Yu, H.; Li, P.; Wang, C.; Xu, X.; Li, S.; Wu, J. Model predictive control based robust scheduling of community integrated energy system with operational flexibility. Appl. Energy 2019, 243, 250–265. [Google Scholar] [CrossRef]
- Li, X.; Wang, W.; Wang, H. A novel bi-level robust game model to optimize a regionally integrated energy system with large-scale centralized renewable-energy sources in Western China. Energy 2021, 228, 120513. [Google Scholar] [CrossRef]
- Yang, S.; Tan, Z.; Zhao, R.; De, G.; Li, H.; Ju, L.; Zhou, F. Operation optimization and income distribution model of park integrated energy system with power-to-gas technology and energy storage. J. Clean. Prod. 2020, 247, 119090. [Google Scholar] [CrossRef]
- Yang, S.; Tan, Z.; Lin, H.; Li, P.; De, G.; Zhou, F.; Ju, L. A two-stage optimization model for Park Integrated Energy System operation and benefit allocation considering the effect of Time-Of-Use energy price. Energy 2020, 195, 117013. [Google Scholar] [CrossRef]
- Yu, Q.; Xie, J.; Chen, X.; Yu, K.; Gan, L. Loss and emission reduction allocation in distribution networks using MCRS method and Aumann–Shapley value method. IET Gener. Transm. Distrib. 2018, 12, 5975–5981. [Google Scholar] [CrossRef]
- Jentsch, M.; Trost, T.; Sterner, M. Optimal use of power-to-gas energy storage systems in an 85% renewable energy scenario. Energy Procedia 2014, 46, 254–261. [Google Scholar] [CrossRef]
- Zhou, S.; Sun, K.; Wu, Z.; Gu, W.; Wu, G.; Li, Z.; Li, J. Optimized operation method of small and medium-sized integrated energy system for P2G equipment under strong uncertainty. Energy 2020, 199, 117269. [Google Scholar] [CrossRef]
- Heinisch, V. Effects of power-to-gas on power systems: A case study of Denmark. In Proceedings of the 2015 IEEE Eindhoven PowerTech, Eindhoven, The Netherlands, 29 June–2 July 2015. [Google Scholar]
- Mohammadkhani, N.; Sedighizadeh, M.; Esmaili, M. Energy and emission management of CCHPs with electric and thermal energy storage and electric vehicle. Therm. Sci. Eng. Prog. 2018, 8, 494–508. [Google Scholar] [CrossRef]
- Luo, Y.; Yin, Z.; Yang, D.; Zhou, B. A new wind power accommodation strategy for combined heat and power system based on Bi-Directional conversion. Energies 2019, 12, 2458. [Google Scholar] [CrossRef]
- Songhuai, D.; Xinghua, Z.; Lu, M.; Hui, X. A novel nucleolus-based loss allocation method in bilateral electricity markets. IEEE Trans. Power Syst. 2006, 21, 28–33. [Google Scholar] [CrossRef]
- Du, Y.; Wang, Z.; Liu, G.; Chen, X.; Yuan, H.; Wei, Y.; Li, F. A cooperative game approach for coordinating multi-microgrid operation within distribution systems. Appl. Energy 2018, 222, 383–395. [Google Scholar] [CrossRef]
- Osicka, O.; Guajardo, M.; van Oost, T. Cooperative game-theoretic features of cost sharing in location-routing. Int. Trans. Oper. Res. 2020, 27, 2157–2183. [Google Scholar] [CrossRef]
- Stamtsis, G.C.; Erlich, I. Use of cooperative game theory in power system fixed-cost allocation. IEE Proc. Gener. Transm. Distrib. 2004, 151, 401–406. [Google Scholar] [CrossRef]
- Parlar, M.; Sharafali, M.; Goh, M. Optimal control and cooperative game theory based analysis of a by-product synergy system. J. Clean. Prod. 2019, 233, 731–742. [Google Scholar] [CrossRef]
- Freire, L.; Street, A.; Lima, D.A.; Barroso, L.A. A hybrid MILP and benders decomposition approach to find the nucleolus quota allocation for a renewable energy portfolio. IEEE Trans. Power Syst. 2015, 30, 3265–3275. [Google Scholar] [CrossRef]
- Nord Pool Market. Available online: https://www.nordpoolgroup.com/ (accessed on 5 September 2022).
- Wang, Y.; Yang, Y.; Tang, L.; Sun, W.; Li, B. A Wasserstein based two-stage distributionally robust optimization model for optimal operation of CCHP micro-grid under uncertainties. Int. J. Electr. Power Energy Syst. 2020, 119, 105941. [Google Scholar] [CrossRef]
- TenneT. Available online: https://www.tennet.eu/ (accessed on 5 September 2022).
- Cheng, L.; Liu, C.; Wu, Q.; Gao, S. A stochastic optimal model of micro energy internet contains rooftop PV and CCHP system. In Proceedings of the 2016 International Conference on Probabilistic Methods Applied to Power Systems (PMAPS), Beijing, China, 16–20 October 2016. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value | Parameters | Value |
|---|---|---|---|
| 250 kW | 200 kWh | ||
| 100 | 300 kWh | ||
| 50 kWh | |||
| 50 kW | |||
| 200 DKK/kWh | 50 kW | ||
| 0 kW | 0.85 | ||
| 500 kW | 100 | ||
| 0.65 | 200 | ||
| 600 kW | 0 | ||
| 100 kW | 50 | ||
| 50 kW | 50 | ||
| 0.35 | 0.9 | ||
| 1 | 200 kW | ||
| 500 kW | 350 kW | ||
| 0.7 | 50 kW | ||
| 400 kW | 100 kW | ||
| 3 | 100 kW | ||
| 300 kW | 0.9 | ||
| 0.7 | 0.85 | ||
| 1 | - | - |
| Run Time (s) | Sample Size | ||||||
|---|---|---|---|---|---|---|---|
| 80 | 160 | 240 | 320 | 400 | 480 | ||
| Cases | Case 1 | 3.22 | 3.34 | 3.51 | 3.62 | 3.73 | 3.73 |
| Case 4 | 14.08 | 44.62 | 81.14 | 134.75 | 176.83 | 241.27 | |
| Operation Mode | Operation Cost (DKK) | |||
|---|---|---|---|---|
| MGS | EPSO | NGSO | CHSO | |
| Independent | 2993.12 | 1301.74 | −233.66 | 1925.04 |
| Cooperative | 2159.44 | 857.05 | −299.32 | 1601.71 |
| Cost reduction | 833.68 | 444.69 | 65.66 | 323.33 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Sun, Y.; Zhang, J.; Zhang, F. Optimal Microgrid System Operating Strategy Considering Variable Wind Power Outputs and the Cooperative Game among Subsystem Operators. Energies 2022, 15, 6601. https://doi.org/10.3390/en15186601
Li Y, Sun Y, Zhang J, Zhang F. Optimal Microgrid System Operating Strategy Considering Variable Wind Power Outputs and the Cooperative Game among Subsystem Operators. Energies. 2022; 15(18):6601. https://doi.org/10.3390/en15186601
Chicago/Turabian StyleLi, Yanbin, Yanting Sun, Junjie Zhang, and Feng Zhang. 2022. "Optimal Microgrid System Operating Strategy Considering Variable Wind Power Outputs and the Cooperative Game among Subsystem Operators" Energies 15, no. 18: 6601. https://doi.org/10.3390/en15186601
APA StyleLi, Y., Sun, Y., Zhang, J., & Zhang, F. (2022). Optimal Microgrid System Operating Strategy Considering Variable Wind Power Outputs and the Cooperative Game among Subsystem Operators. Energies, 15(18), 6601. https://doi.org/10.3390/en15186601