

Overview of Arbitrarily High-Order Adjoint Sensitivity and Uncertainty Quantification Methodology for Large-Scale Systems


Abstract
:1. Introduction
2. The Fundamental Role of High-Order Sensitivities in Defining Correlations among Model Responses and Parameters
- The expected (or mean) value of a model parameter , denoted as , is defined as follows:The expected values are considered to be the components of the following vector of mean (expected) values:
- The covariance, , of two parameters, and , is defined as follows:The variance, , of a parameter , is defined as follows:The standard deviation of a parameter , which is denoted , is defined as follows: . The correlation, , between two parameters and , is defined as follows:
- The third-order correlation, , among three parameters , and , is defined as follows:
- The fourth-order correlation among four parameters, is defined as follows, for :In the important particular case when the parameters are normally distributed, the following relation holds:
- The expectation (value), , of a response is defined as follows:
- The covariance between two responses and is defined as follows:
- The triple correlations (or third-order moment of the distribution of responses), denoted as , among three responses , , and , are defined as follows:
- The quadruple correlations (or fourth-order moment of the distribution of responses), denoted as , among four responses , , , and , are defined as follows:
- e.
- The covariance between computed responses and a parameter is defined as follows:
- f.
- The triple-correlations among one parameter, , and two responses, and , are defined as follows:
- g.
- The triple correlations among two parameters , and one response are defined as follows:
- h.
- The quadruple correlations denoted as , among one parameter, , and three responses , , and , are defined as follows:
- i.
- The quadruple correlations, denoted as , among two parameters , and two responses , , are defined as follows:
- j.
- The quadruple correlations, denoted as , among three parameters , , and one response, , are defined as follows:
3. High-Order Sensitivity and Uncertainty Analysis of Linear Models/Systems: Illustrative Example and General Theory
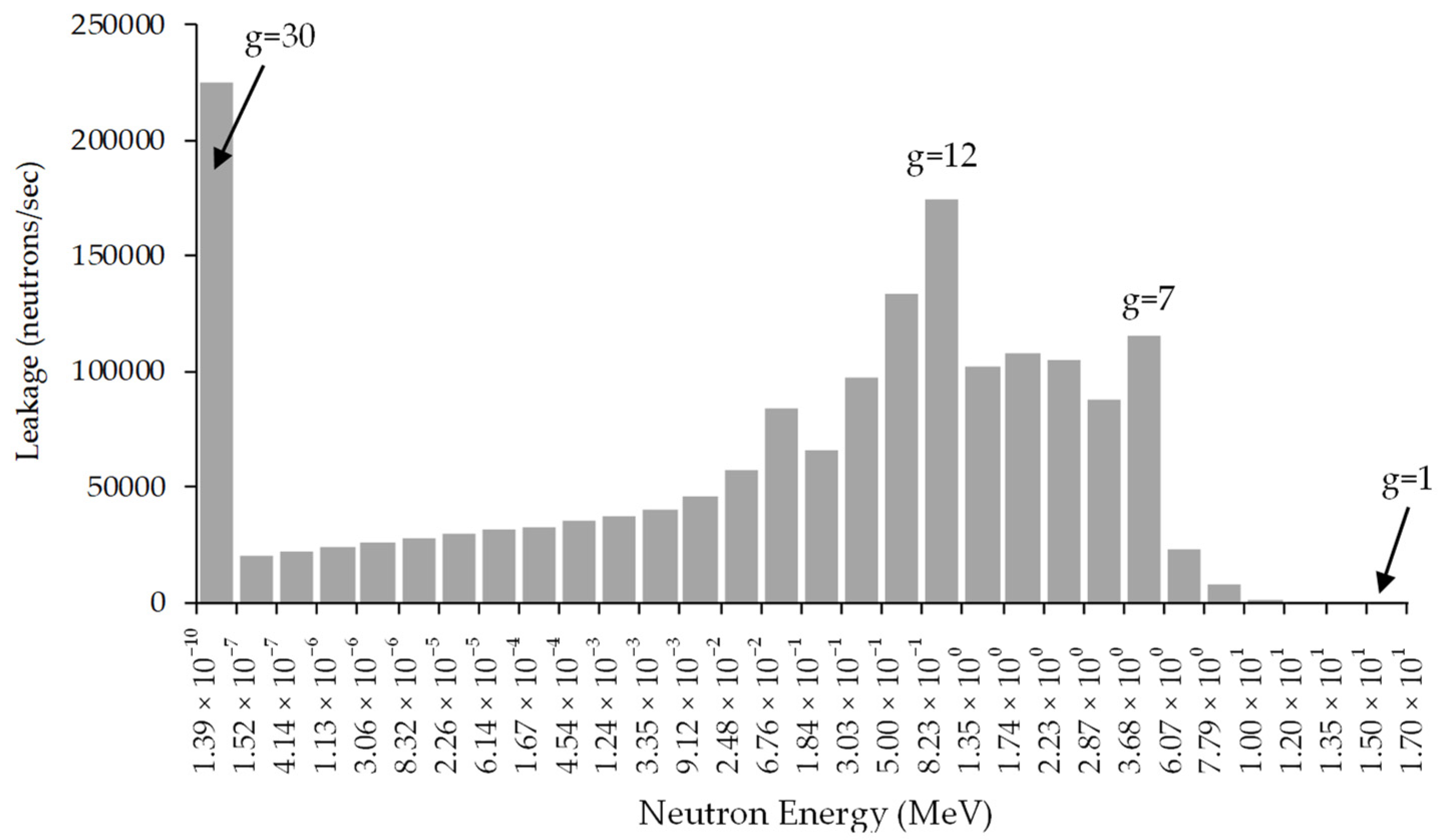
3.1. Illustrating the Need for High-Order Sensitivity Analysis and Uncertainty Quantification: A Paradigm Reactor Physics Benchmark
3.1.1. Overview of Results for the First, Second, Third, and Fourth-Order Sensitivities
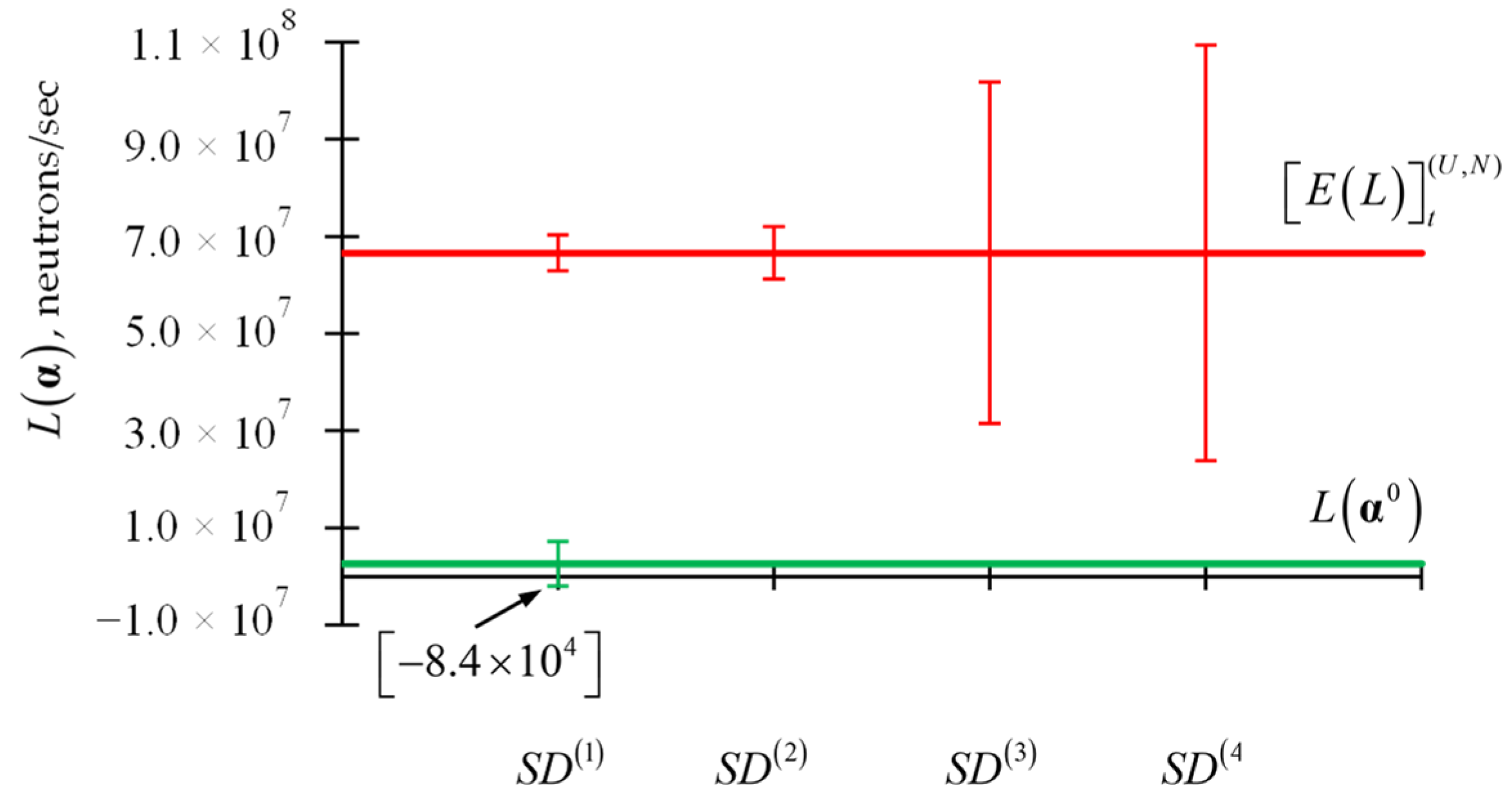
3.1.2. Overview of the Impacts of the First-, Second-, Third-, and Fourth-Order Sensitivities on Uncertainties Induced in the PERP’s Leakage Response
3.1.3. Effects of the Fourth-Order Sensitivities on the Third-Order Response Moment and Skewness
3.2. Overview of the nth-Order Comprehensive Adjoint Sensitivity Analysis Methodology for Response-Coupled Forward and Adjoint Linear Systems (nth-CASAM-L)
- Introduce a Hilbert space, denoted as , comprising square-integrable function vector-valued elements of the form , , . The inner product between two elements, , , is denoted as and is defined as follows:
- In the Hilbert , form the inner product of Equation (39) with a vector-valued function to obtain:
- Using the definition of the adjoint operator in the Hilbert space , recast the left side of Equation (46) as follows:where denotes the bilinear concomitant defined on the phase-space boundary , and where is the operator formally adjoint to , defined as follows:
- Require the first term on right side of Equation (47) to represent the indirect effect term defined in Equation (38), to obtain the following relation:where
- Implement the boundary conditions given in Equation (40) into Equation (47) and eliminate the remaining unknown boundary values of the functions and from the expression of the bilinear concomitant by selecting appropriate boundary conditions for the function , to ensure that Equation (49) is well-posed while being independent of unknown values of , , and . The boundary conditions thus chosen for the function can be represented in operator form as follows:
- The selection of the boundary conditions for the adjoint function represented by Equation (51) eliminates the appearance of the unknown values of in the bilinear concomitant and reduces it to a residual quantity which will be denoted as and which contains boundary terms involving only known values of , , , , and . This residual quantity does not automatically vanish.
- The system of equations comprising Equation (49) together with the boundary conditions represented in Equation (51) constitute the First-Level Adjoint Sensitivity System (1st-LASS). The solution of the 1st-LASS is called the First-level adjoint sensitivity function. The 1st-LASS is called “first-level” (as opposed to “first-order”) because it does not contain any differential or functional derivatives, but its solution, , is used below to compute the first-order sensitivities of the response with respect to the model parameters.
- It follows from (46) and (47) that the following relation holds:
- Recalling from (49) that the first term on the right side of (52) is the indirect effect term , it follows from (52) that the indirect effect term can be expressed in terms of the first-level adjoint sensitivity function as follows:
- (1)
- The quantity denotes the nth-order partial sensitivity of the response with respect to the model parameters, evaluated at the nominal values of the parameters and state functions. When the symmetries among the various partial derivatives/sensitivities are considered, the respective indices have ranges as follows: ; ; …; . In integral form, the nth-order partial sensitivity of the response can be written as follows:
- (2)
- The nth-level state , which appears in the arguments of , is defined as follows:
- (3)
- The inner product which appears in Equation (57) is defined in a Hilbert space denoted as , comprising -dimensional block vectors having the following structure: ,, . The inner product between two elements, and , of the Hilbert space , is denoted as and is defined as follows:
- (4)
- The adjoint operator which appears on the left side of Equation (62) is constructed by using the inner product defined in Equation (60), via the following relation:
- (5)
- The nth-level adjoint sensitivity function , which appears in the arguments of , is the solution of the following nth-level adjoint sensitivity system nth-LASS, for ; ; …:where the vector , comprises components defined for each ; ; …; , as follows:
- (6)
- The quantity denotes the residual bilinear concomitant defined on the phase-space boundary , evaluated at the nominal values of the model parameter and respective state functions.
4. High-Order Sensitivity and Uncertainty Analysis of Nonlinear Models/Systems: Illustrative Example and General Theory
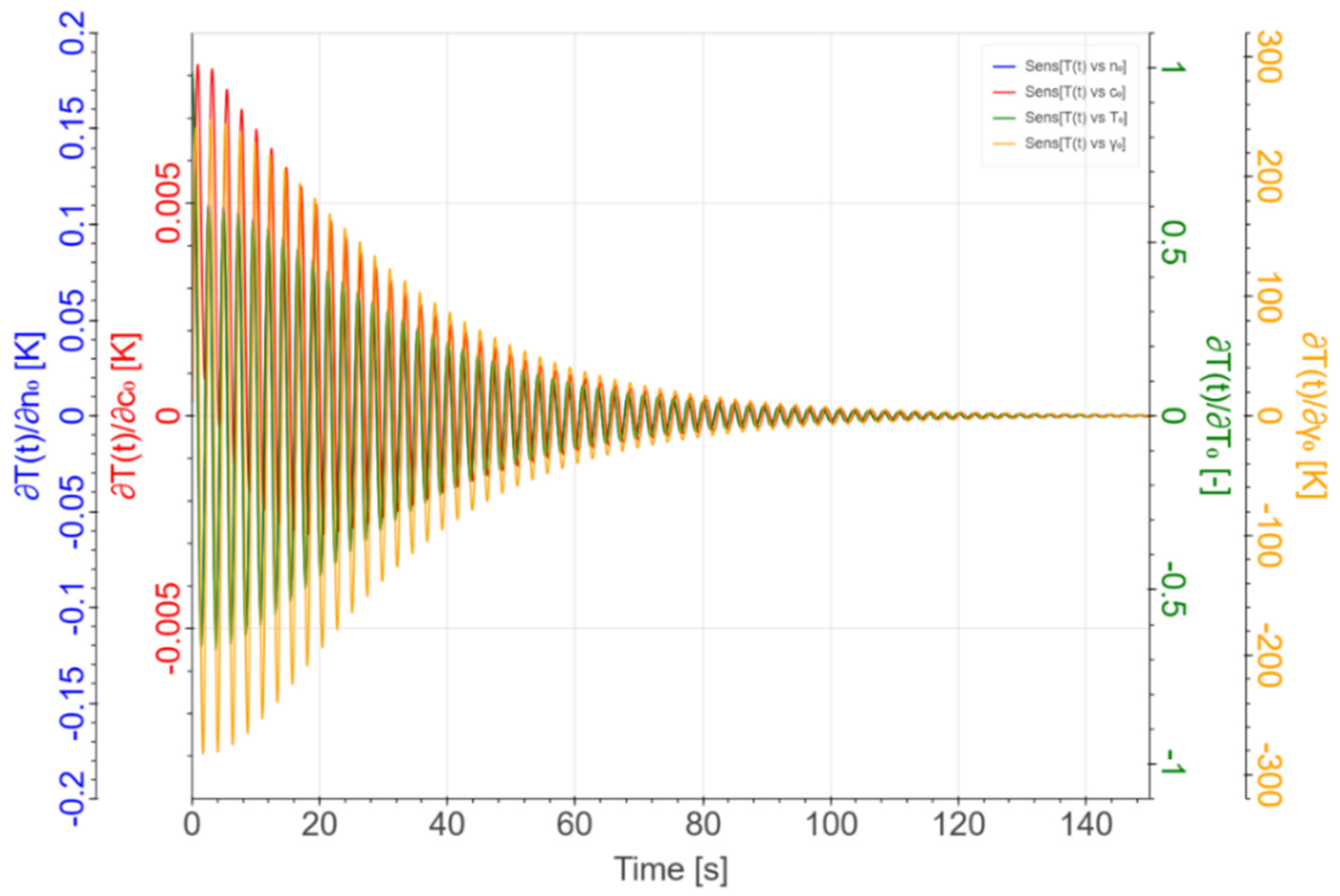
4.1. Illustrative Sensitivity and Uncertainty Analysis of a Reduced-Order Model of BWR-Dynamics
- (a)
- A point reactor representation of neutron kinetics, including the neutron precursors:
- (b)
- A “one-node” lumped-parameter representation of the heat transfer process in the fuel:
- (c)
- A “two-nodes” lumped-parameter representation of the channel thermal hydraulics, accounting for the reactivity feedback:
- (i)
- denotes the normalized excess neutron population, where denotes the actual time-dependent neutron population and denotes the neutron population of the initially critical reactor.
- (ii)
- denotes the normalized excess population of delayed neutron precursors, where denotes the actual time-dependent population of delayed neutron precursors and denotes the population of delayed neutron precursors of the initially critical reactor.
- (iii)
- denotes the excess fuel temperature, defined as the departure from the temperature of the initially critical reactor.
- (iv)
- denotes the Heaviside functional: and .
- (v)
- denotes the relative excess coolant density, defined as the departure from the coolant density of the initially critical reactor.
- (vi)
- denotes the excess reactivity, defined as the departure from the reactivity of the initially critical reactor.
- Stable equilibrium (A), which corresponds to the critical reactor configuration, which is defined as follows:
- b.
- Unstable equilibrium (B):
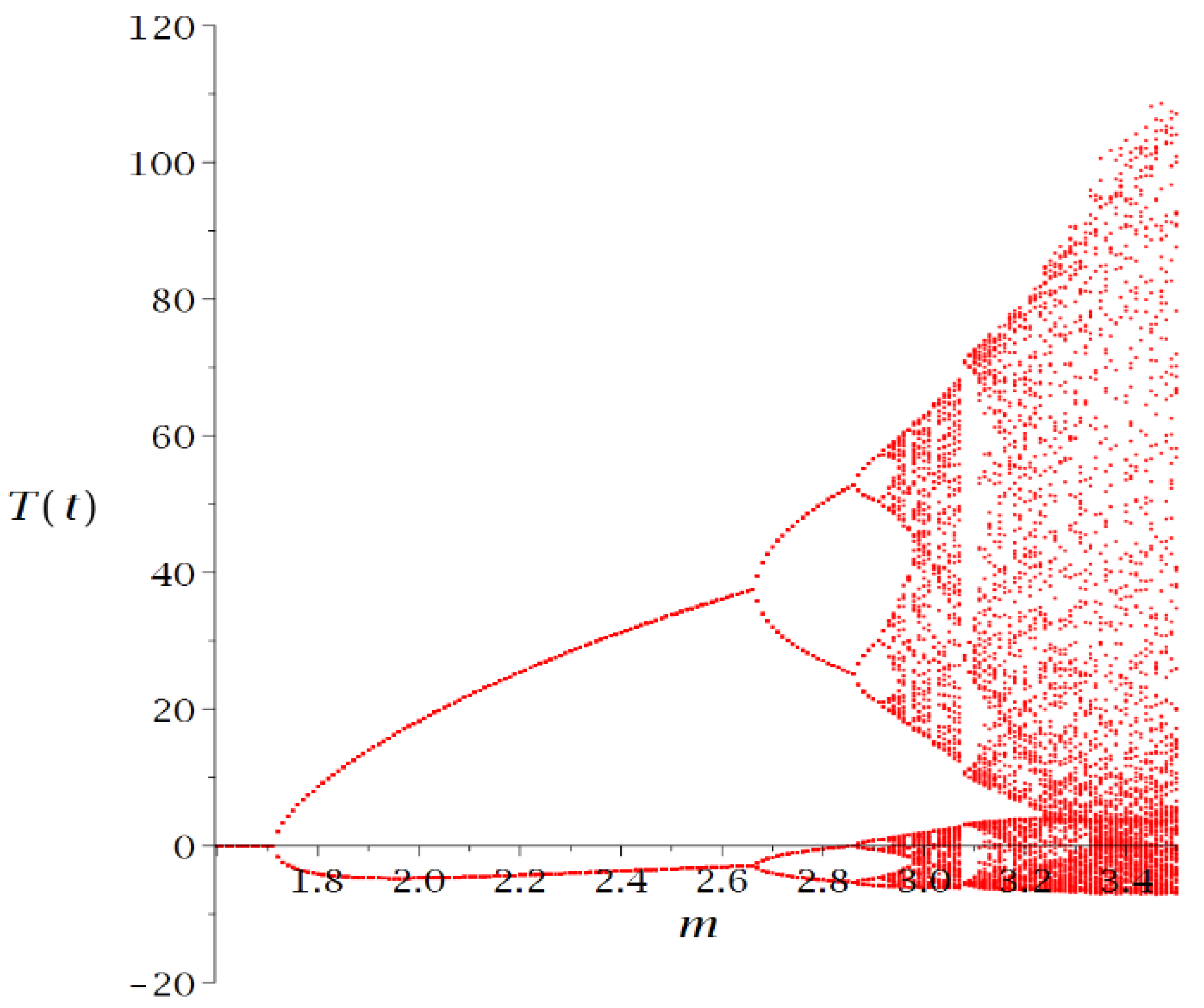
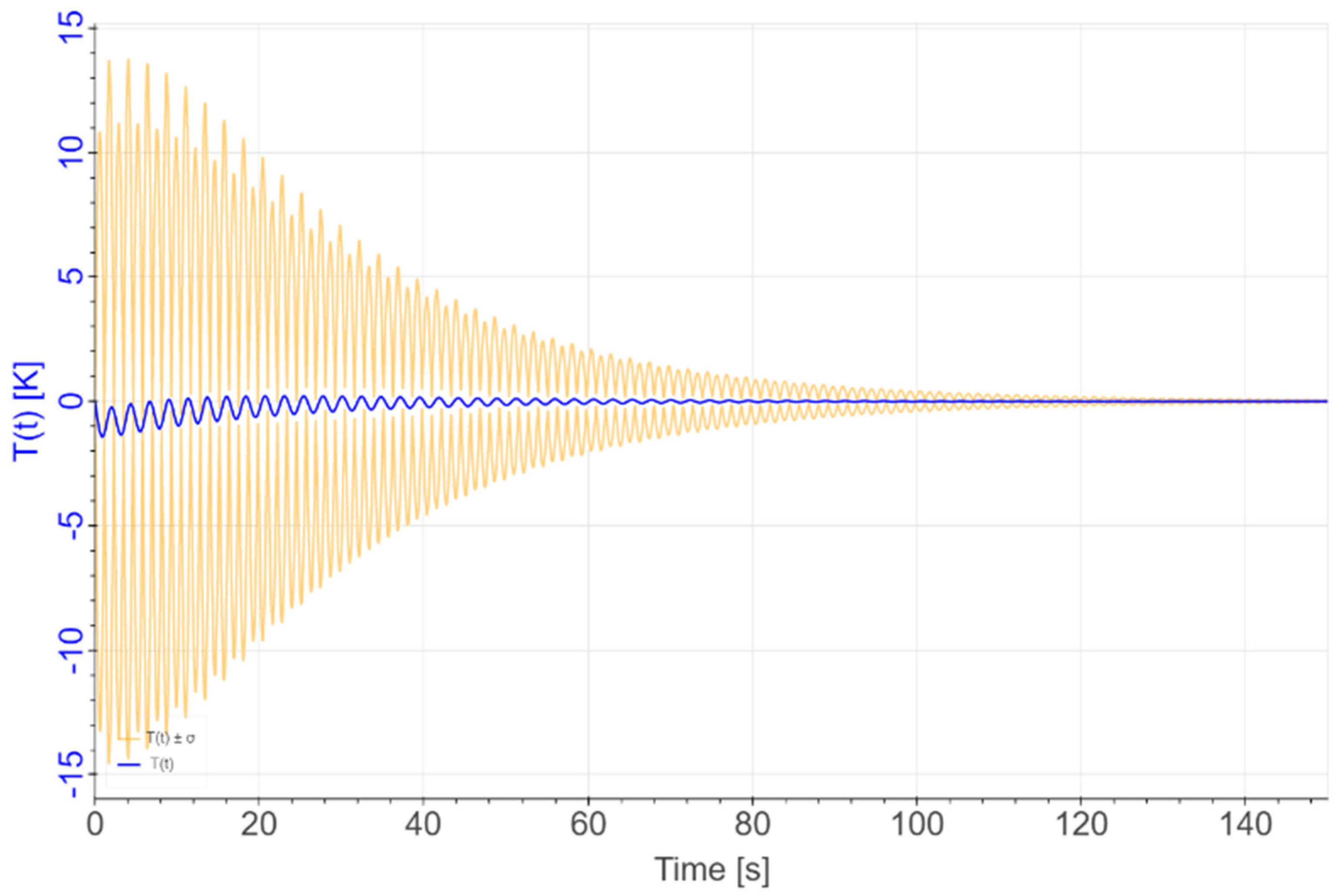
- Region 1: Stable Region, before the first-order bifurcation, , in which the state functions oscillate with decreasing amplitudes converging toward steady-state values.
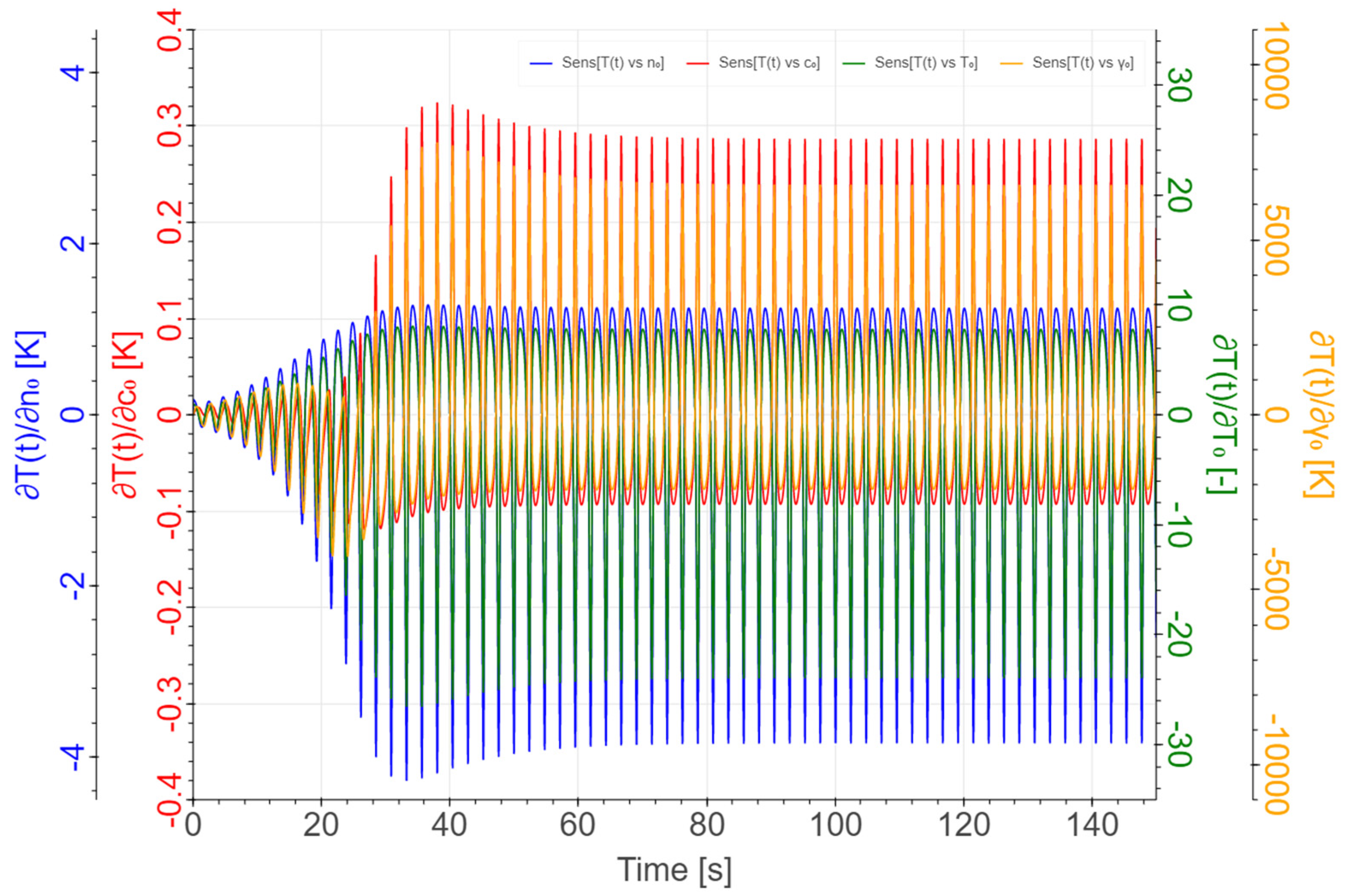
- Region 2: Unstable Region between the first-order bifurcation and the second-order bifurcations, , in which the state functions oscillate indefinitely between two unstable attractors.
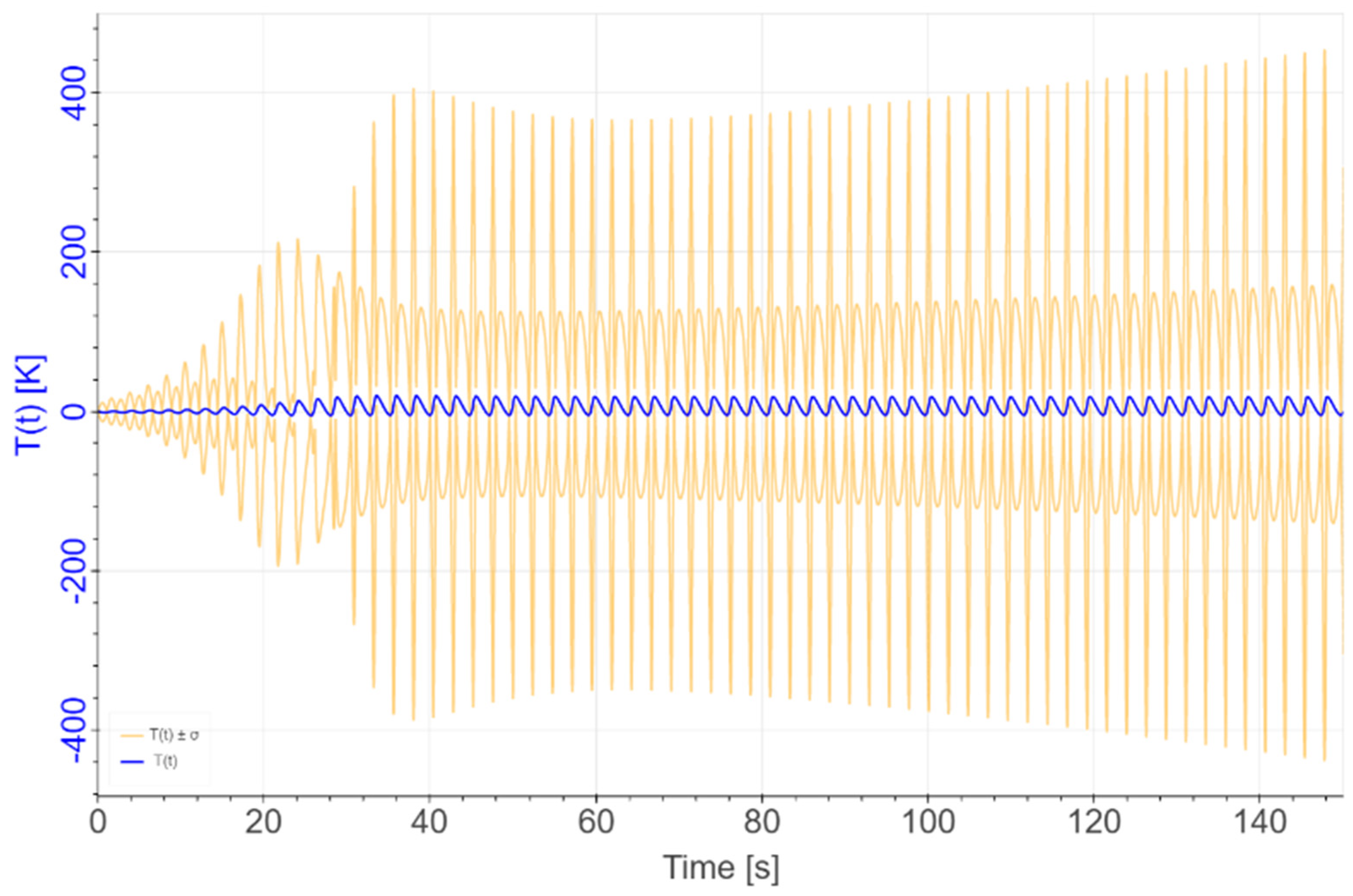
- Region 3: Unstable Region between the second-order bifurcations and the third-order bifurcations, , in which the state functions oscillate indefinitely between four unstable attractors.
- Region 4: Unstable Region between the third-order bifurcations and the fourth-order bifurcations, , in which the state functions oscillate indefinitely between eight unstable attractors.
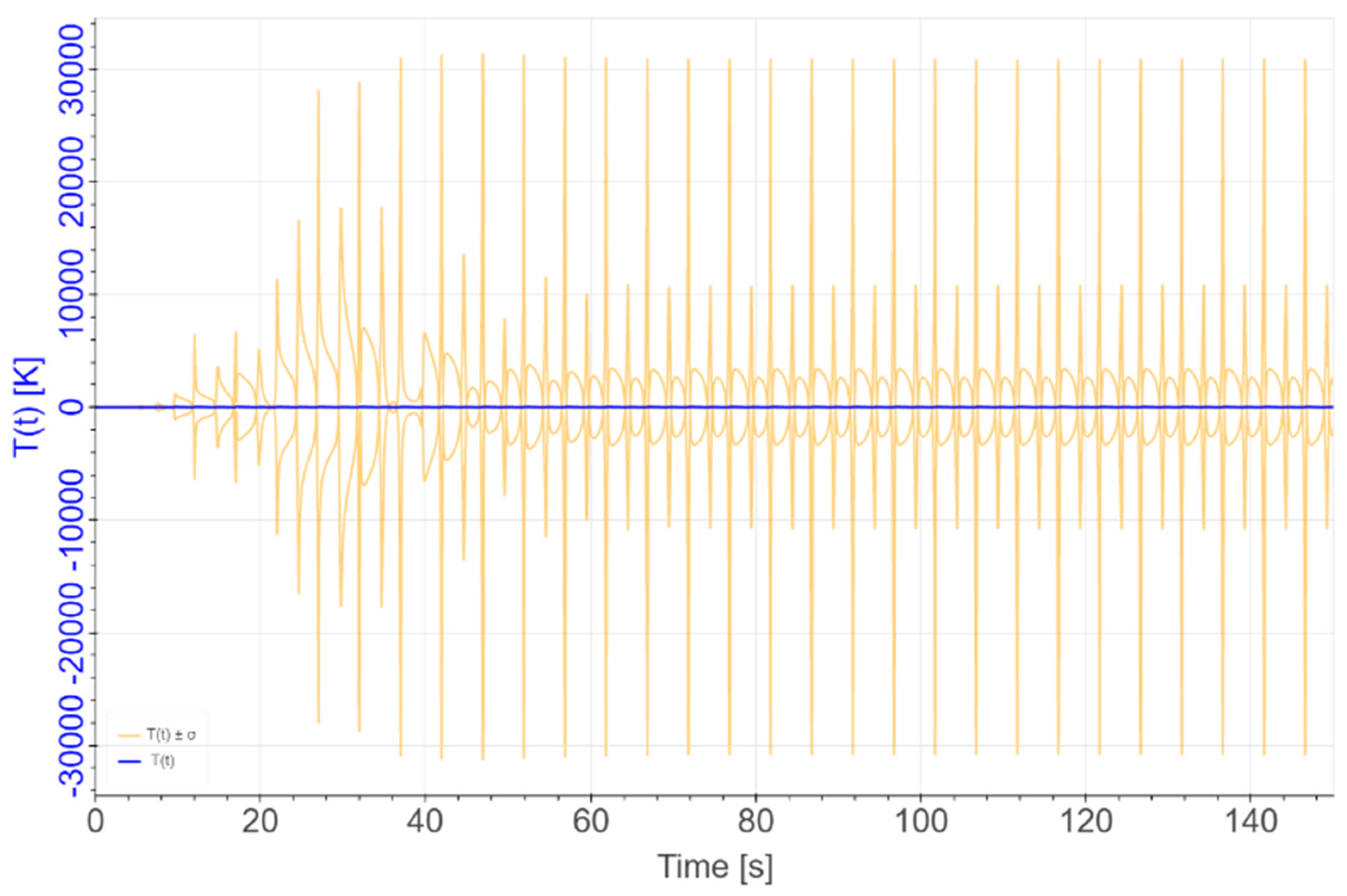
- Region 5: Chaotic Region stemming from the cascade of period-doubling pitchfork bifurcations produced when the feedback gain is increased past a critical value (called accumulation point), , where , in which the state functions oscillate indefinitely between infinitely many unstable attractors.
4.2. Overview of the nth-Order Comprehensive Sensitivity Analysis Methodology for Nonlinear Systems (nth-CASAM-N)
- is a -dimensional column vector of dependent variables; the abbreviation “” denotes “total number of dependent variables.” The functions denote the system’s “dependent variables” (also called “state functions”); , where is a normed linear space over the scalar field of real numbers.
- denotes a -dimensional column vector. The components are operators (including differential, difference, integral, distributions, and/or finite or infinite matrices) acting (usually) nonlinearly on the dependent variables , the independent variables , and the model parameters . The mapping is defined on the combined domains of the model’s parameters and state functions, i.e., , where , , , .
- is a -dimensional column vector which represents inhomogeneous source terms, which usually depend nonlinearly on the uncertain parameters . The vector is defined on a normed linear space denoted as , i.e., .
- (i)
- The nth-level adjoint sensitivity function , which appears in the inner product on the right side of Equation (113), is the solution of the following nth-Level Adjoint Sensitivity System (nth-LASS):subject to boundary conditions represented in operator form as follows:The quantities which appear in the definition of the nth-LASS, cf. (115) and (116), are defined as follows:The variational matrix comprises block matrices, each comprising components/elements. Thus, the matrix comprises a total of components/elements. The quantity denotes a block matrix having components, each component being a -dimensional matrix having identically zero components. The other submatrices appearing in the definition of are as follows:
- (ii)
- The quantity , which appears in the inner product on the right side of Equation (113), is defined as follows:
- (iii)
- The inner product which appears on the right side of Equation (113) is defined in a Hilbert space , the elements of which are block vectors of the form , comprising -dimensional vectors of the form , . The Hilbert space is endowed with an inner product of two vectors and , denoted as and defined as follows:
- (iv)
- The nth-Level Adjoint Sensitivity System (nth-LASS) for the nth-level adjoint function is obtained by using the inner product defined in (128), as follows:where the quantity denotes the corresponding bilinear concomitant on the domain’s boundary, evaluated at the nominal values for the parameters and respective state functions.
- (v)
- The quantity , which appears on the right side of Equation (113), denotes residual boundary terms which may have not vanished automatically after having used the variational forward and adjoint boundary conditions to eliminate from Equation (129) all unknown values of the nth-level variational function .
5. Discussion: Unified View of the nth-CASAM-L and nth-CASAM-N Methodologies
- The total sensitivity of a model response to the model parameters is defined as the Gateaux (G)-differential of the response with respect to variations in the model parameters and state functions, thereby giving rise to two terms: (i) the so-called direct effect term, which depends directly and solely on the variations in the model parameters, and (ii) the so-called indirect effect term, which depends solely on the variations in the model’s state functions.
- The straightforward evaluation of the indirect effect term would require performing as many large-scale computations (equivalent to solving the original equations) as there are model parameters, which is computationally impractical/unfeasible for realistic models involving many parameters.
- The need for performing impractically many large-scale computations is overcome by replacing the state function variations in the expression of the indirect effect term with the first-level adjoint sensitivity function, the computation of which requires a single large-scale computation for solving the 1st-LASS, which is independent of parameter variations.
- Each subsequent sensitivity is treated as a model response, i.e., the first-order sensitivities are considered to be model responses for the computation of the second-order sensitivities using second-level adjoint sensitivity functions, and so on. The dimensions of the nth-LASS increase linearly with the order n of the computed sensitivity.
- The sensitivities of order higher than first are computed in the ranking order of the first-order sensitivities, starting with the second-order sensitivities stemming from the largest first-order sensitivity, which are computed with the highest priority.
- Since the linear operators that underly linear systems admit adjoint operators, important model responses of linear systems can be functions of both the forward and the adjoint state functions. Such responses cannot be encountered in nonlinear problems, since nonlinear operators do not admit adjoint operators. In such cases, the nth-CASAM-L should be applied, since it is most efficient computational methodology.
- When the model response of a linear system depends only on either the forward or adjoint state function, the nth-CASAM-L and nth-CASAM-N coincide. Thus, when the model response depends only on the forward state function , the correspondence between the nth-CASAM-L and nth-CASAM-N is as follows: and . On the other hand, when the model response depends only on the adjoint state function , the correspondence between the nth-CASAM-L and nth-CASAM-N is as follows: and .
- When the model response depends both on the forward state function and on the adjoint state function , the correspondence between the nth-CASAM-L and nth-CASAM-N is as follows: , , , , and . If such a concatenation of the original forward and adjoint models for linear systems were implemented in practice, however, such a concatenation could lead to an unnecessary computational burden by comparison to the nth-CASAM-L framework, which treats separately the component forward and adjoint linear systems.
- Within both the nth-CASAM-L and nth-CASAM-N, the sizes of the nth-level adjoint sensitivity systems increase linearly with increasing level n, which represents the order of the sensitivities being computed. This indicates that the number of large-scale computations increases linearly with the order of sensitivities. In this sense, the nth-CASAM-L and nth-CASAM-N overcome the curse of dimensionality [1] in sensitivity analysis, since, in contradistinction to the nth-CASAM-L and nth-CASAM-N methodologies, the number of large-scale computations needed to compute the nth-order sensitivities using conventional methods increases exponentially with the sensitivities’ order. Of course, computing sensitivities by using finite difference formulas in conjunction with re-computations using altered parameter values could be a “solution of last resort” for selected sensitivities. However, as has been shown in [29,43] for the linear and nonlinear illustrative paradigm problems reviewed in Section 3 and Section 4, respectively, using finite differences becomes not only computationally unfeasible for obtaining higher-order sensitivities because of the “curse of dimensionality,” but finding the optimal step size to minimize the error between the finite difference result and the exact result is practically impossible to achieve unless one knew beforehand what the exact result is (which would be possible only by using the CASAM-L and nth-CASAM-N methodologies). As has been demonstrated in [29,43], a step size that is “too small” produces large errors, while a step-size which is “too large” produces even larger errors or even non-convergence. However, unless one knows ahead of time the exact result, it is not possible even to know that the finite difference formula has produced a correct or an erroneous result.
- Ongoing work aims at merging (a) concepts of artificial intelligence (AI) with (b) concepts underlying the nth-CASAM methodologies and (c) concepts underlying the “BERRU-predictive modelling” methodology [63] into a new, potentially ground-breaking methodology aimed at “Intelligent High-Order Forward and Inverse Predictive Modelling” in order to achieve the following goals: (i) quantify the impact of ignorance, such as missing phenomena in the computational model and/or experimental information; (ii) reduce uncertainties in predicted model responses/results; (iii) improve the fidelity of computational models by reducing uncertainties in imprecisely known model parameters and incorporating missing phenomena, thus reducing the impact of prior ignorance.
Funding
Conflicts of Interest
References
- Bellman, R.E. Dynamic Programming; Rand Corporation and Princeton University Press: Princeton, NJ, USA, 1957; ISBN 978-0-691-07951-6. [Google Scholar]
- Wigner, E.P. Effect of Small Perturbations on Pile Period; Chicago Report CP-G-3048; Springer: Chicago, IL, USA, 1945. [Google Scholar]
- Gandini, A.; Salvatores, M. Nuclear Data and Integral Measurements Correlation for Fast Reactors. Part 3: The Consistent Method CNEN-RT/FI (74)3, 1974.
- Weisbin, C.R.; Marable, J.H.; Lucius, J.L.; Oblow, E.M.; Mynatt, F.R.; Peelle, R.W.; Perey, F.G. Application of FORSS Sensitivity and Uncertainty Methodology to Fast Reactor Benchmark Analysis, ORNL/TM-5563; Oak Ridge National Laboratory: Oak Ridge, TN, USA, 1976. [Google Scholar]
- Goldstein, H. A Survey of Cross Section Sensitivity Analysis as Applied to Radiation Shielding. In Proceedings of the Fifth International Conference on Reactor Shielding, Knoxville, TN, USA, 18–22 April 1977; Roussin, R.W., Abbott, L.S., Bartine, D.E., Eds.; Science Press: Princeton, NJ, USA, 1977; pp. 73–90. [Google Scholar]
- Greenspan, E.; Karni, Y.; Gilai, D. High Order Effects in Cross Section Sensitivity Analysis; United States: N. p. 1978. Web.
- Gandini, A. Higher Order Time-Dependent Generalized Perturbation Theory. Nucl. Sci. Eng. 1978, 67, 91. [Google Scholar] [CrossRef]
- Cacuci, D.G. Sensitivity Theory for Nonlinear Systems: I. Nonlinear Functional Analysis Approach. J. Math. Phys. 1981, 22, 2794–2802. [Google Scholar] [CrossRef]
- Cacuci, D.G. Sensitivity Theory for Nonlinear Systems: II. Extensions to Additional Classes of Responses. J. Math. Phys. 1981, 22, 2803–2812. [Google Scholar] [CrossRef]
- Práger, T.; Kelemen, F.D. Adjoint methods and their application in earth sciences. In Advanced Numerical Methods for Complex Environmental Models: Needs and Availability; Faragó, I., Havasi, Á., Zlatev, Z., Eds.; Bentham Science Publishers: Oak Park, IL, USA, 2014; Chapter 4A; pp. 203–275. [Google Scholar]
- Luo, Z.; Wang, X.; Liu, D. Prediction on the static response of structures with large-scale uncertain-but-bounded parameters based on the adjoint sensitivity analysis. Struct. Multidiscip. Optim. 2020, 61, 123–139. [Google Scholar] [CrossRef]
- Haftka, R.T. Second-order sensitivity derivatives in structural analysis. AIAA J. 1982, 20, 1765–1766. [Google Scholar] [CrossRef]
- Haftka, R.T.; Mroz, Z. First-and second-order sensitivity analysis of linear and nonlinear structures. AIAA J. 1986, 24, 1187–1192. [Google Scholar] [CrossRef]
- Haug, E.J.; Ehle, P.E. Second-order design sensitivity analysis of mechanical system dynamics. Int. J. Numer. Methods Eng. 1982, 18, 1699–1717. [Google Scholar] [CrossRef]
- Le Dimet, F.X.; Navon, I.M.; Daescu, D.N. Second-order information for data assimilation. Monthly Weather Rev. 2002, 130, 629–648. [Google Scholar] [CrossRef]
- Ye, X.; Li, P.; Liu, F.Y. Exact time-domain second-order adjoint-sensitivity computation for linear circuit analysis and optimization. IEEE Trans. Circ. Syst. 2010, 57, 236–248. [Google Scholar]
- Cacuci, D.G. Second-Order Adjoint Sensitivity Analysis Methodology (2nd-ASAM) for Computing Exactly and Efficiently First- and Second-Order Sensitivities in Large-Scale Linear Systems: I. Computational Methodology. J. Comp. Phys. 2015, 284, 687–699. [Google Scholar] [CrossRef]
- Cacuci, D.G. Second-Order Adjoint Sensitivity Analysis Methodology (2nd-ASAM) for Large-Scale Nonlinear Systems: I. Theory. Nucl. Sci. Eng. 2016, 184, 16–30. [Google Scholar]
- Cacuci, D.G.; Fang, R.; Favorite, J.A. Comprehensive Second-Order Adjoint Sensitivity Analysis Methodology (2nd-ASAM) Applied to a Subcritical Experimental Reactor Physics Benchmark: I. Effects of Imprecisely Known Microscopic Total and Capture Cross Sections. Energies 2019, 12, 4219. [Google Scholar] [CrossRef] [Green Version]
- Fang, R.; Cacuci, D.G. Comprehensive Second-Order Adjoint Sensitivity Analysis Methodology (2nd-ASAM) Applied to a Subcritical Experimental Reactor Physics Benchmark: II. Effects of Imprecisely Known Microscopic Scattering Cross Sections. Energies 2019, 12, 4114. [Google Scholar] [CrossRef]
- Cacuci, D.G.; Fang, R.; Favorite, J.A.; Badea, M.C.; Di Rocco, F. Comprehensive Second-Order Adjoint Sensitivity Analysis Methodology (2nd-ASAM) Applied to a Subcritical Experimental Reactor Physics Benchmark: III. Effects of Imprecisely Known Microscopic Fission Cross Sections and Average Number of Neutrons per Fission. Energies 2019, 12, 4100. [Google Scholar] [CrossRef]
- Fang, R.; Cacuci, D.G. Comprehensive Second-Order Adjoint Sensitivity Analysis Methodology (2nd-ASAM) Applied to a Subcritical Experimental Reactor Physics Benchmark. IV: Effects of Imprecisely Known Source Parameters. Energies 2020, 13, 1431. [Google Scholar] [CrossRef]
- Fang, R.; Cacuci, D.G. Comprehensive Second-Order Adjoint Sensitivity Analysis Methodology (2nd-ASAM) Applied to a Subcritical Experimental Reactor Physics Benchmark: V. Computation of 2nd-Order Sensitivities Involving Isotopic Number Densities. Energies 2020, 13, 2580. [Google Scholar] [CrossRef]
- Cacuci, D.G.; Fang, R.; Favorite, J.A. Comprehensive Second-Order Adjoint Sensitivity Analysis Methodology (2nd-ASAM) Applied to a Subcritical Experimental Reactor Physics Benchmark: VI. Overall Impact of 1st- and 2nd-Order Sensitivities. Energies 2020, 13, 1674. [Google Scholar] [CrossRef]
- Valentine, T.E. Polyethylene-reflected plutonium metal sphere subcritical noise measurements, SUB-PU-METMIXED-001. In International Handbook of Evaluated Criticality Safety Benchmark Experiments; NEA/NSC/DOC(95)03/I-IX; Organization for Economic Co-Operation and Development (OECD), Nuclear Energy Agency (NEA): Paris, France, 2006. [Google Scholar]
- Cacuci, D.G.; Fang, R. Third-Order Adjoint Sensitivity Analysis of an OECD/NEA Reactor Physics Benchmark: I. Mathematical Framework. Am. J. Comput. Math. 2020, 10, 503–528. [Google Scholar] [CrossRef]
- Fang, R.; Cacuci, D.G. Third-Order Adjoint Sensitivity Analysis of an OECD/NEA Reactor Physics Benchmark: II. Computed Sensitivities. Am. J. Comp. Math. 2020, 10, 529–558. [Google Scholar] [CrossRef]
- Cacuci, D.G. Fourth-Order Comprehensive Adjoint Sensitivity Analysis (4th-CASAM) of Response-Coupled Linear Forward/Adjoint Systems: I. Theoretical Framework. Energies 2021, 14, 3335. [Google Scholar] [CrossRef]
- Cacuci, D.G.; Fang, R. Fourth-Order Adjoint Sensitivity Analysis of an OECD/NEA Reactor Physics Benchmark: II. Mathematical Expressions and CPU-Time Comparisons for Computing 4th-Order Sensitivities. Am. J. Comp. Math. 2021, 11, 133–156. [Google Scholar] [CrossRef]
- Fang, R.; Cacuci, D.G. Fourth-Order Adjoint Sensitivity and Uncertainty Analysis of an OECD/NEA Reactor Physics Benchmark: I. Computed Sensitivities. J. Nucl. Eng. 2021, 2, 281–308. [Google Scholar] [CrossRef]
- Cacuci, D.G. On the Need to Determine Accurately the Impact of Higher-Order Sensitivities on Model Sensitivity Analysis, Uncertainty Quantification and Best-Estimate Predictions. Energies 2021, 14, 6318. [Google Scholar] [CrossRef]
- Cacuci, D.G. High-Order Deterministic Sensitivity Analysis and Uncertainty Quantification: Review and New Developments. Energies 2021, 14, 6715. [Google Scholar] [CrossRef]
- Cacuci, D.G. Towards Overcoming the Curse of Dimensionality: The Third-Order Adjoint Method for Sensitivity Analysis of Response-Coupled Linear Forward/Adjoint Systems, with Applications to Uncertainty Quantification and Predictive Modeling. Energies 2019, 12, 4216. [Google Scholar] [CrossRef]
- Cacuci, D.G. Towards Overcoming the Curse of Dimensionality in Predictive Modelling and Uncertainty Quantification. In Proceedings of the Invited Plenary Presentation, PHYSOR 2020: Transition to a Scalable Nuclear Future, Cambridge, UK, 29 March–2 April 2020. [Google Scholar]
- Cacuci, D.G. Towards Overcoming the Curse of Dimensionality in Predictive Modelling and Uncertainty Quantification. Eur. Phys. J. Conf. 2021, 247, 20005. [Google Scholar] [CrossRef]
- Cacuci, D.G. The nth-Order Comprehensive Adjoint Sensitivity Analysis Methodology for Response-Coupled Forward/Adjoint Linear Systems (nth-CASAM-L): I. Mathematical Framework. Energies 2021, 14, 8314. [Google Scholar] [CrossRef]
- Levine, H.; Schwinger, J. On the theory of diffraction by an aperture in an infinite plane screen. Phys. Rev. 1949, 75, 1423. [Google Scholar] [CrossRef]
- Roussopolos, P. Methodes variationeles en theories des collisions. C.R. Acad. Sci. 1953, 236, 1858. [Google Scholar]
- Stacey, W.M. Variational Methods in Nuclear Reactor Physics; Academic Press, Inc.: New York, NY, USA, 1974. [Google Scholar]
- Cacuci, D.G. The Fourth-Order Comprehensive Adjoint Sensitivity Analysis Methodology for Nonlinear Systems (4th-CASAM-N): I. Mathematical Framework. J. Nucl. Eng. 2022, 3, 37–71. [Google Scholar] [CrossRef]
- Cacuci, D.G. The Fifth-Order Comprehensive Adjoint Sensitivity Analysis Methodology for Nonlinear Systems (5th-CASAM-N): I. Mathematical Framework. Am. J. Comput. Math. 2022, 12, 44–78. [Google Scholar] [CrossRef]
- Cacuci, D.G. The nth-Order Comprehensive Adjoint Sensitivity Analysis Methodology for Nonlinear Systems (nth-CASAM-N): Mathematical Framework. J. Nucl. Eng. 2022, 3, 163–190. [Google Scholar] [CrossRef]
- Cacuci, D.G.; DiRocco, F. Sensitivity and Uncertainty Analysis of a Reduced-Order Model of Nonlinear BWR Dynamics Sensitivity and Uncertainty Analysis of Boiling Water Reactors Nonlinear Dynamics: II. Adjoint Sensitivity Analysis. Ann. Nucl. Energy 2020, 148, 107748. [Google Scholar] [CrossRef]
- DiRocco, F.; Cacuci, D.G. Sensitivity and Uncertainty Analysis of a Reduced-Order Model of Nonlinear BWR Dynamics. III: Uncertainty Analysis Results. Ann. Nucl. Energy 2020, 148, 107749. [Google Scholar] [CrossRef]
- March-Leuba, J.; Cacuci, D.G.; Perez, R.B. Universality and Aperiodic Behavior of Nuclear Reactors. Nucl. Sci. Eng. 1984, 86, 401–404. [Google Scholar] [CrossRef]
- March-Leuba, J.; Cacuci, D.G.; Perez, R.B. Nonlinear Dynamics and Stability of Boiling Water Reactors: Part 1—Qualitative Analysis. Nucl. Sci. Eng. 1986, 93, 111–123. [Google Scholar] [CrossRef]
- March-Leuba, J.; Cacuci, D.G.; Perez, R.B. Nonlinear Dynamics and Stability of Boiling Water Reactors: Part 2—Quantitative Analysis. Nucl. Sci. Eng. 1986, 93, 124–136. [Google Scholar] [CrossRef]
- March-Leuba, J.; Blakeman, E.D. A Mechanism for Out-of-Phase Power Instabilities in Boiling Water Reactors. Nucl. Sci. Eng. 1991, 107, 173. [Google Scholar] [CrossRef]
- Tsuji, M.; Nishio, K.; Narita, M.; Ogawa, Y.; Mori, M. Stability Analysis of BWRs Using Bifurcation Theory. J. Nucl. Sci. Technol. 1993, 30, 1107–1119. [Google Scholar] [CrossRef]
- Karve, A.A.; Uddin, R.; Dorning, J.J. Stability analysis of BWR nuclear-coupled thermal-hydraulics using a simple model. Nucl. Eng. Des. 1997, 177, 155–177. [Google Scholar] [CrossRef]
- Dokhane, A.; Hennig, D.; Uddin, R.; Chawla, R. BWR stability and bifurcation analysis using reduced order models and system codes: Identification of a subcritical Hopf bifurcation using RAMONA. Ann. Nucl. Energy 2007, 34, 792–802. [Google Scholar] [CrossRef]
- Lange, C.; Hennig, D.; Hurtado, A. An advanced reduced order model for BWR stability analysis. Prog. Nucl. Energy 2011, 53, 139–160. [Google Scholar] [CrossRef]
- Wahia, P.; Kumawat, V. Nonlinear stability analysis of a reduced order model of nuclear reactors: A parametric study relevant to the advanced heavy water reactor. Nucl. Eng. Des. 2011, 241, 134–143. [Google Scholar] [CrossRef]
- Pandey, V.; Singh, S. Detailed bifurcation analysis with a simplified model for advanced heavy water reactor system. Commun. Nonlinear Sci. 2015, 20, 186–198. [Google Scholar] [CrossRef]
- Pandey, V.; Singh, S. A bifurcation analysis of boiling water reactor on large domain of parametric spaces. Commun. Nonlinear Sci. 2016, 38, 30–44. [Google Scholar] [CrossRef]
- Cacuci, D.G. The nth-Order Comprehensive Adjoint Sensitivity Analysis Methodology, Volume 1; Springer Nature: Cham, Switzerland, 2022. [Google Scholar] [CrossRef]
- Tukey, J.W. The Propagation of Errors, Fluctuations and Tolerances; Technical Reports No. 10–12; Princeton University: Princeton, NJ, USA, 1957; pp. 23–42. [Google Scholar]
- Alcouffe, R.E.; Baker, R.S.; Dahl, J.A.; Turner, S.A.; Ward, R. PARTISN: A Time-Dependent, Parallel Neutral Particle Transport Code System; LA-UR-08-07258; Los Alamos National Laboratory: Los Alamos, NM, USA, 2008. [Google Scholar]
- Wilson, W.B.; Perry, R.T.; Charlton, W.S.; Parish, T.A.; Shores, E.F. SOURCES4C: A code for calculating (α, n), spontaneous fission, and delayed neutron sources and spectra. In Proceedings of the American Nuclear Society/Radiation Protection and Shielding Division 12th Biennial Topical Meeting, Santa Fe, NM, USA, 14–18 April 2002. [Google Scholar]
- Conlin, J.L.; Parsons, D.K.; Gardiner, S.J.; Gray, M.; Lee, M.B.; White, M.C. MENDF71X: Multigroup Neutron Cross-Section Data Tables Based upon ENDF/B-VII.1X; Los Alamos National Laboratory Report LA-UR-15-29571; Los Alamos National Laboratory: Los Alamos, NM, USA, 2013. [Google Scholar]
- Chadwick, M.B.; Herman, M.; Obložinský, P.; Dunn, M.E.; Danon, Y.; Kahler, A.C.; Smith, D.L.; Pritychenko, B.; Arbanas, G.; Arcilla, R.; et al. ENDF/B-VII.1: Nuclear data for science and technology: Cross sections, covariances, fission product yields and decay data. Nucl. Data Sheets 2011, 112, 2887–2996. [Google Scholar] [CrossRef]
- United States Nuclear Regulatory Commission Information Notice No. 88–39: LaSalle Unit 2 Loss of Recirculation Pumps with Power Oscillation Event; Office of Nuclear Reactor Regulation: Washington DC, USA, 15 June 1988.
- Cacuci, D.G. BERRU Predictive Modeling: Best Estimate Results with Reduced Uncertainties; Springer: Berlin/Heidelberg, Germany; New York, NY, USA, 2019. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Materials | Isotopes | Weight Fraction |
|---|---|---|
| Material 1 (plutonium metal) | Isotope 1 (239Pu) | 9.3804 × 10−1 |
| Isotope 2 (240Pu) | 5.9411 × 10−2 | |
| Isotope 3 (69Ga) | 1.5152 × 10−3 | |
| Isotope 4 (71Ga) | 1.0346 × 10−3 | |
| Material 2 (polyethylene) | Isotope 5 (12C) | 8.5630 × 10−1 |
| Isotope 6 (1H) | 1.4370 × 10−1 |
| Symbol | Parameter Name | Number of Parameters |
|---|---|---|
| Multigroup microscopic total cross section for isotope and energy group | 180 | |
| Multigroup microscopic scattering cross section for -th-order Legendre expansion, for isotope , from energy group into group | 21,600 | |
| Multigroup microscopic fission cross section and energy group | 60 | |
| Average number of neutrons per fission for isotope and energy group | 60 | |
| Fission spectrum for isotope and energy group | 60 | |
| Source parameters: | 10 | |
| Isotopic number density for isotope and material | 6 | |
| Total number of parameters | 21,976 |
| Expected Value | RSD = 1% | RSD = 5% | RSD = 10% |
|---|---|---|---|
| 1.765 × 106 | 1.765 × 106 | 1.765 × 106 | |
| 4.598 × 104 | 1.149 × 106 | 4.598 × 106 | |
| 6.026 × 103 | 3.766 × 106 | 6.026 × 107 | |
| 1.817 × 106 | 6.681 × 106 | 6.662 × 107 |
| Variances | RSD = 1% | RSD = 5% | RSD = 10% |
|---|---|---|---|
| 3.419 × 1010 | 8.549 × 1011 | 3.419 × 1012 | |
| 2.879 × 109 | 1.799 × 1012 | 2.879 × 1013 | |
| 9.841 × 109 | 2.338 × 1013 | 1.236 × 1015 | |
| 1.825 × 109 | 2.852 × 1013 | 1.825 × 1015 | |
| 4.874 × 1010 | 5.456 × 1013 | 3.093 × 1015 |
| Third-Order Moment and Skewness | RSD = 1% | RSD = 5% | RSD = 10% |
|---|---|---|---|
| 6.663 × 1015 | 1.070 × 1019 | 4.982 × 1020 | |
| 3.948 × 1015 | 6.169 × 1019 | 3.948 × 1021 | |
| 1.973 × 1015 | 3.083 × 1019 | 1.973 × 1021 | |
| 1.258 × 1016 | 1.032 × 1020 | 6.419 × 1021 | |
| 1.169 | 0.256 | 0.037 |
| Parameter Nr. | Parameter | Nominal Value | Unit of Measure |
|---|---|---|---|
| 1 | |||
| 2 | |||
| 3 | |||
| 4 | |||
| 5 | |||
| 6 | |||
| 7 | |||
| 8 | |||
| 9 | |||
| 10 | |||
| 11 | |||
| 12 | |||
| 13 | |||
| 14 | |||
| 15 | |||
| 16 |
| Bifurcation Order | Bifurcation Variable | Value | ||
|---|---|---|---|---|
| 1 | ||||
| 2 | ||||
| 3 | ||||
| 4 | ||||
| Transition to chaos (extrapolated) |
| Time Windows | Minimum Sensitivity Value | Maximum Sensitivity Value |
|---|---|---|
| 0–25 s | −1.26 × 1008 | 1.26 × 1008 |
| 25–50 s | −3.46 × 1015 | 3.41 × 1015 |
| 50–75 s | −1.44 × 1022 | 1.44 × 1022 |
| 75–100 s | −2.53 × 1029 | 2.51 × 1029 |
| 100–125 s | −1.45 × 1035 | 1.47 × 1035 |
| 125–150 s | −4.59 × 1043 | 4.56 × 1043 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cacuci, D.G. Overview of Arbitrarily High-Order Adjoint Sensitivity and Uncertainty Quantification Methodology for Large-Scale Systems. Energies 2022, 15, 6590. https://doi.org/10.3390/en15186590
Cacuci DG. Overview of Arbitrarily High-Order Adjoint Sensitivity and Uncertainty Quantification Methodology for Large-Scale Systems. Energies. 2022; 15(18):6590. https://doi.org/10.3390/en15186590
Chicago/Turabian StyleCacuci, Dan Gabriel. 2022. "Overview of Arbitrarily High-Order Adjoint Sensitivity and Uncertainty Quantification Methodology for Large-Scale Systems" Energies 15, no. 18: 6590. https://doi.org/10.3390/en15186590
APA StyleCacuci, D. G. (2022). Overview of Arbitrarily High-Order Adjoint Sensitivity and Uncertainty Quantification Methodology for Large-Scale Systems. Energies, 15(18), 6590. https://doi.org/10.3390/en15186590