1. Introduction
Dynamic and extreme structural loads on turbine components are critical for wind turbine design as rotor diameter increases. In general, mitigating these structural loads leads to an increase in lifetime and safer operation of the wind turbines, especially with large rotors. Thus, a reduction in extreme and fatigue loads can lead to a reduction in Levelized Cost of Energy (LCOE) [
1,
2,
3]. Individual Pitch Control (IPC) is a well-known method that has been utilized to reduce dynamic and extreme loads on wind turbines [
4,
5,
6]. However, load control using IPC can cause excessive wear in the pitch bearings because of the increased oscillating cycles and starved lubrication [
7], which limits the IPC’s operating time.
Active Flow Control (AFC) devices offer an attractive alternative to IPC. These devices can modulate the lift along the blade span. These devices include trailing edge flaps, microtabs, shape changing blades and plasma actuators. Some of these devices, such as Dielectric Barrier Discharge (DBD) plasma actuators, have no moving parts and can be used without extensive wear and tear during operation. Sectional Lift Actuators (SLAs) have been developed to emulate DBD plasma actuators [
8] and have been utilized to reduce dynamic fatigue loads on the blades using the so-called Sectional Lift Control (SLC) [
3,
9,
10].
Apart from fatigue damage due to dynamic loads, extreme loads under gust conditions can also cause serious and sometimes catastrophic damage to the turbine, e.g., tower strike [
11]. Studies have been conducted to evaluate the extreme loads reduction using dynamic load control approaches such as IPC and Individual Flap Control (IFC). Bottasso et al. [
6] proposed a load mitigation strategy using IPC to reduce the ultimate loads under extreme events. Lower peak loads for the main bearing, yaw bearing and tower were achieved, while no significant reduction in blade load was observed. Lackner and van Kuik [
12] investigated the performance of smart rotor control approaches (IPC and IFC) during extreme load events. These approaches, designed for fatigue load reduction, were ineffective at reducing the blade loads during uniform gusts. However, the IFC designed for rotor speed control had additional benefit of reducing blade loads. Bernhammer et al. [
13] analyzed the fatigue and extreme loads reduction with an individual flap controller designed for fatigue load reduction. The blade root bending moments and tip deflections were not affected significantly under gust events during power production. Based on these studies, we can conclude that the dynamic load controllers, designed for fatigue load reduction, have limited capability for reducing extreme loads, especially the blade root moments. This is because the gust wind induces a thrust force in the rotor, which requires a collective rather than a cyclic control to reduce the extreme loads.
Load alleviation systems aiming to reduce extreme loads have also been designed and evaluated in the literature. Kanev and van Engelen [
14] proposed an extreme event control strategy. A wind gust and direction change recognition algorithm was designed based on an extended Kalman filter to detect extreme events using blade root bending moments measurements. Upon detection of an extreme event, the extreme event control was activated. The rotor overspeed was controlled by collectively manipulating the blade pitch angles, and the blade root dynamic loads were mitigated with individual pitch control. Consequently, the extreme gust loads at the blade root were reduced. The normal turbine pitch and torque controllers were switched off under extreme event control. Carcangiu et al. [
15] proposed two strategies to mitigate the extreme loads. A pattern recognition artificial neural network was used to detect extreme wind events using anemometer measurements. Upon gust detection, the first strategy called ‘ride-through’ changed the collective blade pitch to a threshold pitch angle to reduce the loads. Another strategy called ‘early stop’ initiated a controlled stop when the gust event was detected. Overall, the ride-through strategy performed better. The extreme loads of blade root and tower base were reduced by up to 20% and 30%. Schlipf et al. [
16] presented a load reduction controller using LIDAR measurements for wind prediction. A nonlinear model predictive controller with LIDAR measurement was designed and its performance was compared with a baseline controller without wind prediction (i.e., look ahead) information. The results showed up to 50% extreme gust load reduction on the tower base fore-aft bending moment.
Barlas et al. [
17] evaluated the capability of active trailing edge flaps for extreme load alleviation. Collective and individual flap controllers were designed to alleviate extreme and fatigue loads using feedback of the blade root flapwise bending moments. The collective flap controller aimed to reduce the extreme blade load when the loads exceeded the predefined threshold. The flaps were commanded to a predefined angle with a maximum rate to reduce extreme loads. The individual flap controller focused on reducing the blade root fatigue loads in the above-rated conditions under normal operation. The load analysis discovered that the extreme blade root flapwise bending moment was reduced by 12%.
In this study, we focus on a feedback control approach given its simplicity and propose a Gust Alleviation Controller (GAC) to reduce extreme loads and blade-tip deflections using SLAs. A switching logic is designed to integrate the GAC with the existing fatigue load controller (SLC) from [
9] such that SLC is switched off and only GAC is activated during a gust event, while the SLC remains active during the normal operation of the turbine. The GAC proposed in this paper is similar to the one described in [
17], with blade root flapwise bending moment sensors used for feedback. Since the turbine controller also plays a critical role in performance and loads, we investigate and propose a modification to the NREL ROSCO turbine controller [
18], which leads to further reduction of extreme loads and lower out-of-plane tip deflections.
This paper has three contributions. Firstly, we propose a load analysis methodology for design and evaluation of the GAC following the industry IEC standard [
19]. The performance of GAC is evaluated under gust wind condition in terms of reductions in extreme loads and structural deflections. We also evaluate GAC’s effects on turbine performance and fatigue loads under turbulent wind condition. Secondly, we describe a procedure to design the GAC by utilizing the SLAs (Section Lift Actuators). A switching logic with hysteresis is proposed to ensure that the GAC is active when the loads exceed the threshold, and does not affect the normal operations of the turbine with SLC. The optimal load thresholds for the GAC are selected based on a weighted sum of the normalized metrics of interest. The designed GAC shows reductions in extreme loads and deflections by up to 10% under the Extreme Coherent guest with Direction change (ECD). No significant changes are observed in turbine performance and the fatigue damage by activating the GAC. Lastly, we propose a modification in the ROSCO turbine controller by adding a back-calculation anti-windup scheme to improve the saturation management and system dynamics. The GAC with modified ROSCO can reduce the extreme loads and deflections by up to 23%. Standard deviation of the turbine performance indicators such as rotor speed, pitch angle and generator power are reduced by up to 6.2%, which results in a relatively stable turbine operation. The modification in ROSCO also achieves additional reductions in fatigue loads by up to 6.9% under turbulent wind as compared to the case with SLC and original ROSCO only.
The particular wind turbine model and actuator configuration used in our study results in different reductions in extreme loads as compared to prior work using feedback only [
14,
15,
17]. Thus, a quantitative comparison with prior feedback techniques is not quite feasible because results in the open literature use different turbine models. Furthermore, there are differences in wind conditions and turbine operational modes (e.g., “power production”, “power production plus occurrence of fault”) used for the evaluation of ultimate loads. It should be noted that our study involves active flow control using plasma-based actuators (with no moving parts) acting on a particular blade section and does not require installation of LIDAR or pitching the whole blade.
The paper is organized as follows. The turbine setup is described in
Section 2. The turbine model, lift actuator model and controllers including baseline controller and dynamic load controller are briefly introduced.
Section 3 describes the load analysis methodology for GAC development. The IEC standard-based analyses are proposed for gust wind and normal turbulent wind conditions to evaluate the controller performance. The corresponding evaluation metrics are also discussed.
Section 4 discusses the details of the GAC and modified ROSCO (turbine controller). The optimal thresholds selection of the GAC are established based on the weighted sum of selected metrics of interest. The proposed controller configurations are then evaluated and compared in
Section 5 following the load analysis methodology. The extreme load/deflection reduction results under gust wind, as well as the GAC’s effects on turbine performance and fatigue loads are analyzed. Conclusions are in
Section 6.
4. GAC Controller Design
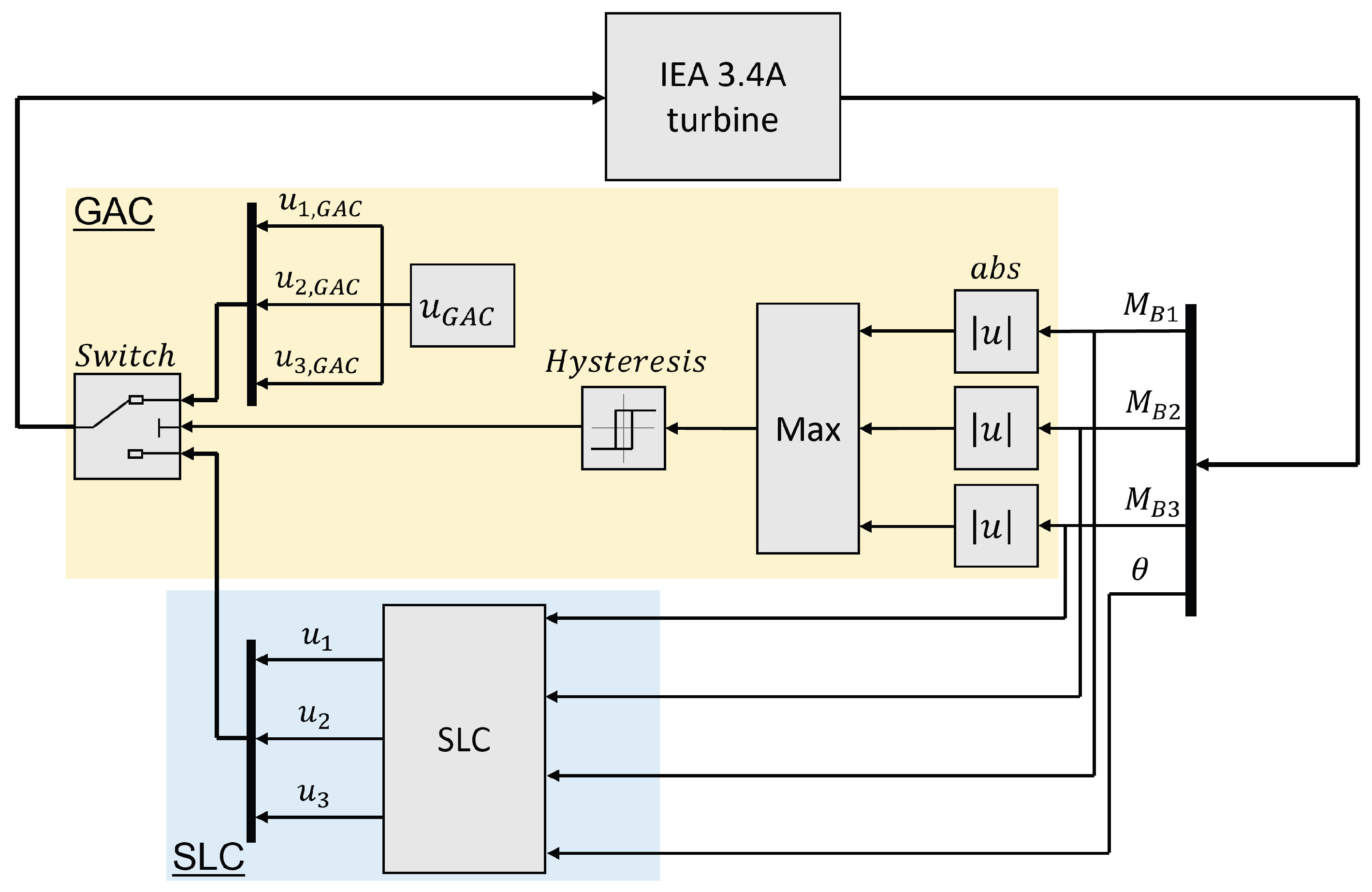
A gust induces a thrust force in the rotor, which requires a collective rather than a cyclic control to reduce the extreme transient loads. The blade responses such as blade root flapwise bending moments are used as the feedback signals. The GAC is designed such that once the flapwise bending moment of any of the three blades reaches a predefined upper load threshold, the SLA actuator commands for all the blades switch to a predefined value () to reduce extreme loads.
We implement a switching logic with hysteresis to ensure that the only the GAC remains active during a gust event or under extreme loads and does not affect the normal operations of the turbine including SLC. The switching logic ensures that the actuator commands switch back to the normal turbine operation (with SLC) once all the bending moments are below a predefined lower load threshold.
Figure 6 shows the block diagram of this switching logic.
4.1. Modifications to the ROSCO
When a large set-point change or disturbance occurs, e.g., due to a gust wind, the turbine PI controller commands may reach actuator limits such as saturation and rate limits. In this case, the system can be considered to be open-loop since the actuator remains at its limit regardless of the plant outputs. For the controllers with an integrator, a saturated actuator causes a non-zero error signal that continues to be integrated. This is the so-called integrator windup. In this case, integrator anti-windup is needed to restore controller effectiveness [
26].
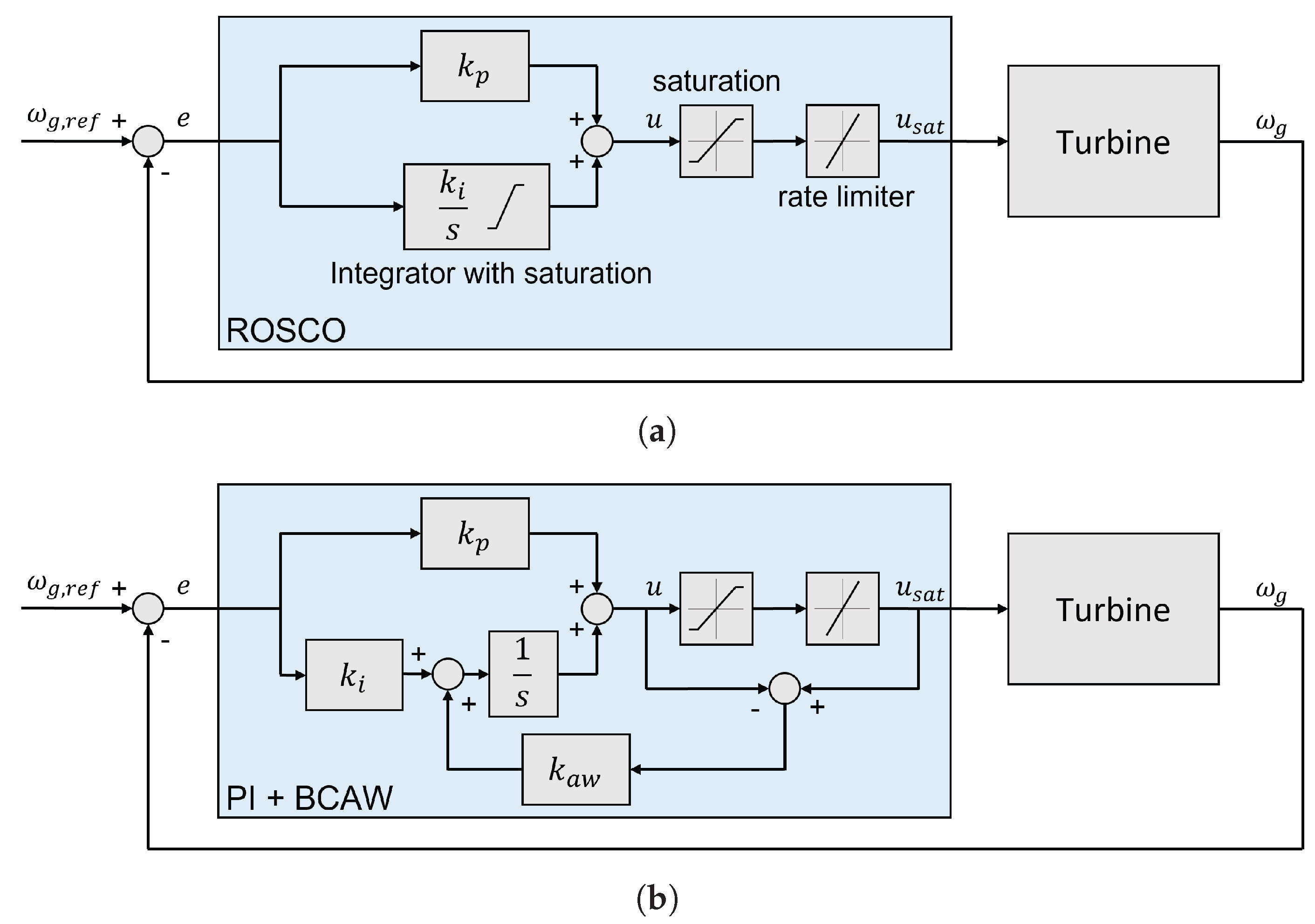
Figure 7a shows the block diagram of the PI controller in ROSCO. The integrator term in ROSCO has built-in saturation to limit its output, but due to the presence of the proportional term, the actuator command can still exceed the actuator limits which causes the system to become open-loop. A better approach to this problem is to remove the integral saturation and implement an anti-windup scheme in the entire PI loop.
To prevent actuator saturation and improve transients, Back-Calculation Anti-Windup (BCAW) is added to the ROSCO PI controllers. With the BCAW, when the output saturates, the input to the integrator is recalculated such that the actuator commands remains close to the saturation limit. The error signal between the output of the controller (u) and the actuator output () is fed to the input of the integrator through gain . It is an extra dynamic feedback path with a tracking time constant such that . The time constant determines how fast the integrator is reset. This error signal remains zero when actuator is not saturated. When the actuator saturates, the anti-windup feedback loop drives the integrator input such that the actuator command tracks the actuator saturation limit and thus, integrator windup is prevented.
Figure 7b shows the block diagram of the PI controller with BCAW. This configuration is implemented in both pitch and torque PI controllers. The tracking time constant is chosen to be equal to the integral time constant
of each controller, which follows the rule of thumb suggested by [
27].
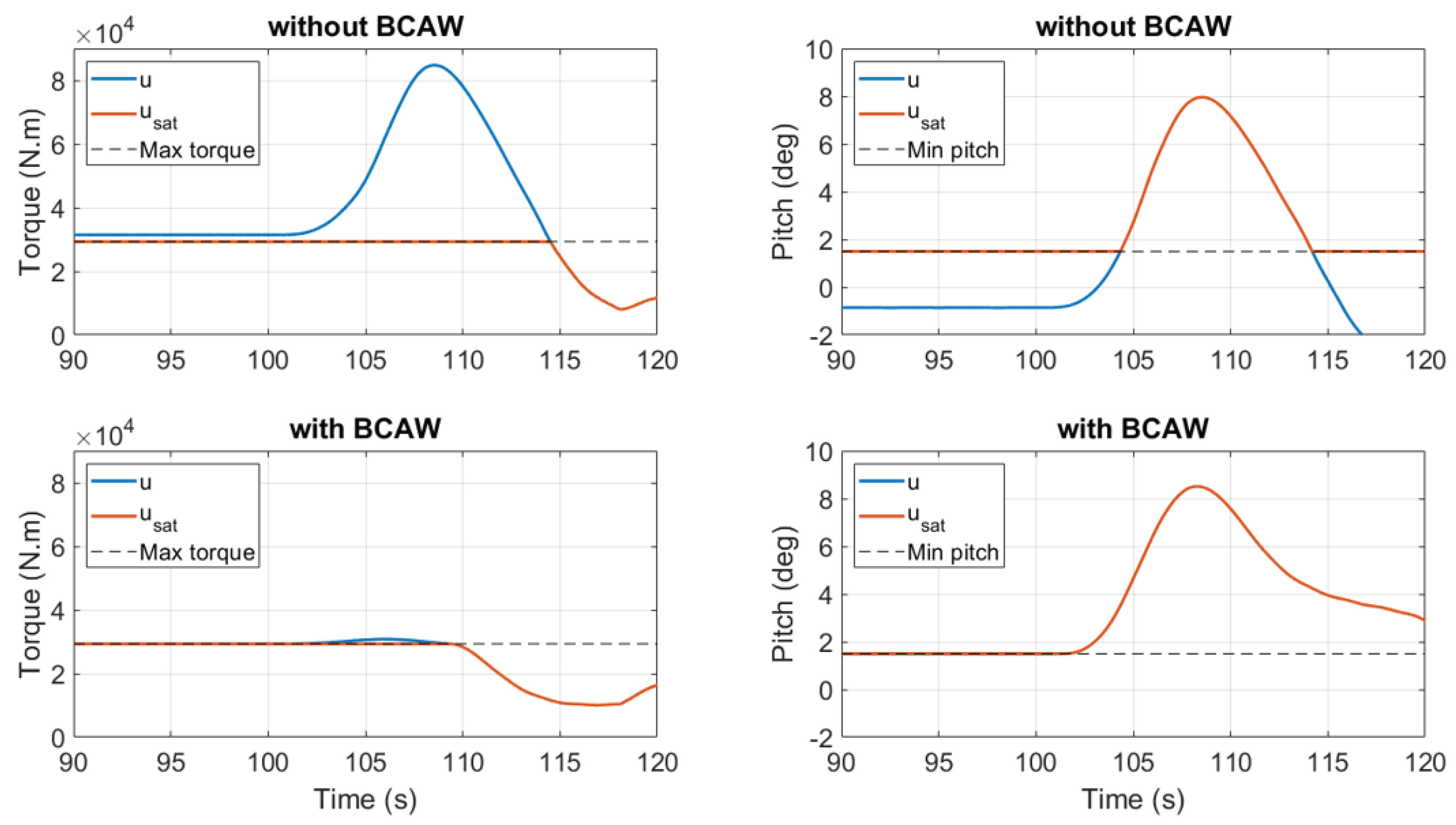
Undesired transitions such as the slow response of pitch controller are observed during the gust event with ROSCO (without BCAW). The controller outputs are compared here to show the differences between two configurations.
Figure 8 shows the controller outputs and saturated commands under the ECD wind described in
Section 3.1.1. Two upper plots show the dynamics of ROSCO torque and pitch controllers, lower plots are with the proposed BCAW configuration. The saturation limits of the torque and pitch are plotted with black dashed lines. By comparing the saturated commands
of pitch and torque controllers, we can see the controllers without BCAW stay at the limit for an additional 2 to 5 s as compared to controllers with BCAW. Under gust wind, a small delay could lead to huge difference in load and turbine performance. Furthermore, the improvement in turbine performance is also observed with BCAW under normal turbulence wind, as will be shown in
Section 5.2.
4.2. Optimal Threshold Selection
The switching logic in the GAC is based on predefined load thresholds (
,
) on the blade root flapwise bending moments. Since the threshold and hysteresis determine when the GAC is turned on and off, they impact the loads and turbine performance. In our experience, the mean of the bending moments grows as the wind speed increases in below-rated conditions and reaches the peak level at rated wind speed. It then decays due to the change of aerodynamic properties (change in blade pitch).
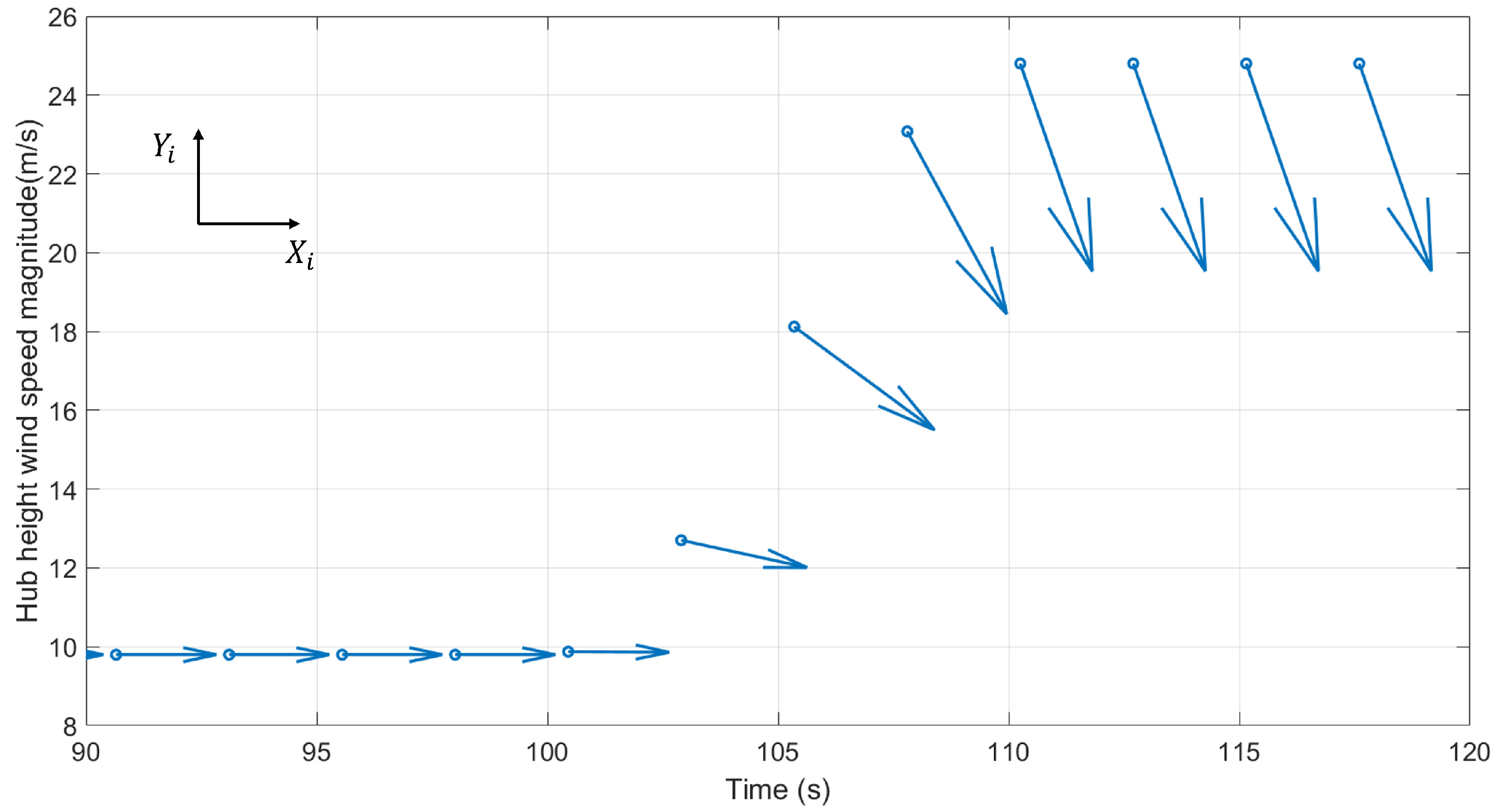
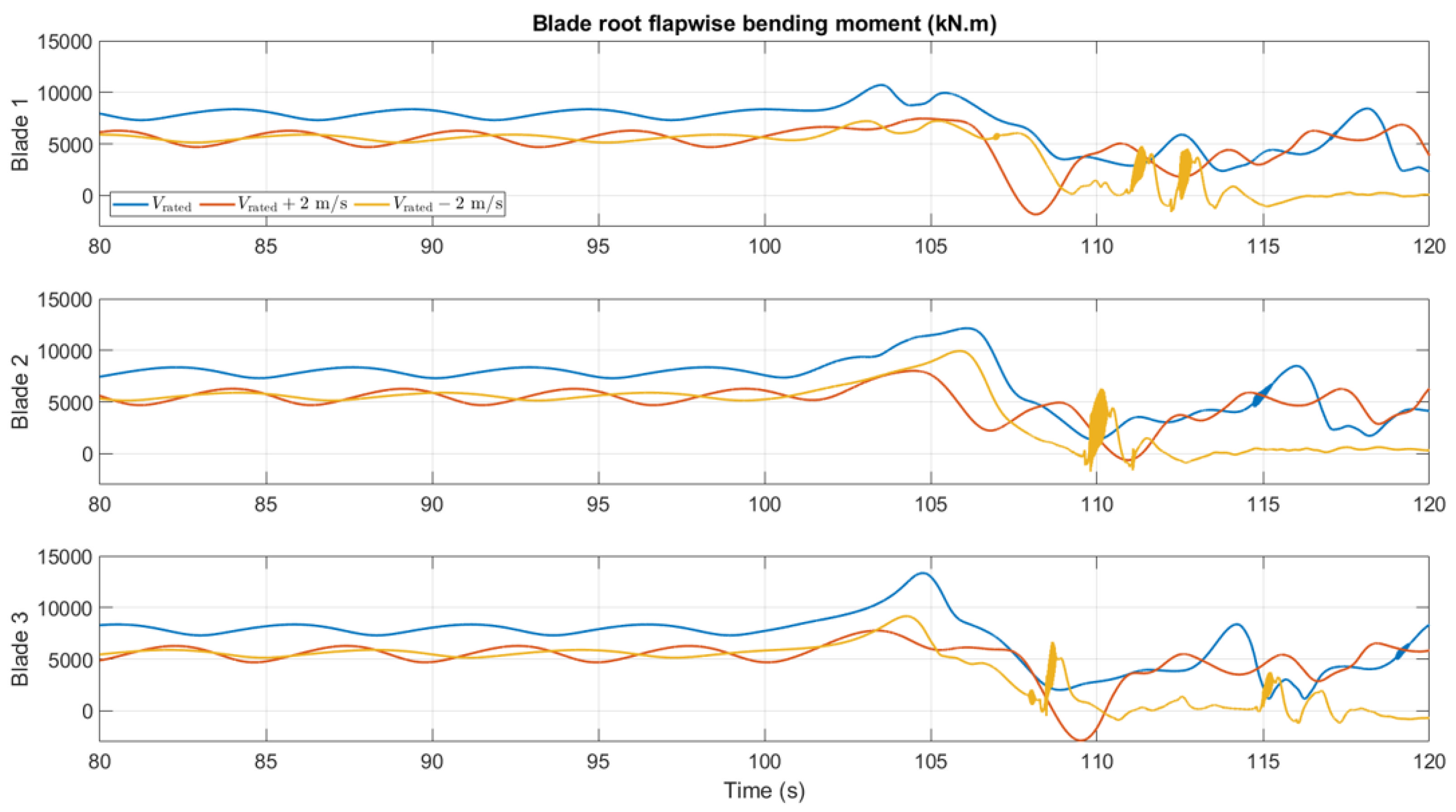
Figure 5 shows the bending moment profile under ECD at three different hub height wind speeds (
). Before the gust (before time
100 s), the bending moments under rated wind speed are at the highest level. The bending moments for the remaining wind speeds have comparable mean values, and both are smaller than the case with rated wind speed. After the gust impinges on the rotor (after time
100 s), the peak loads from highest to the lowest are in the sequence of
. Therefore, the threshold and hysteresis for one wind speed may not be appropriate for the other wind speeds.
In this section, we propose a method for the optimal thresholds selection based on the metrics defined in
Section 3.2. The highest transient load during the gust shows up at the rated wind speed as shown in
Figure 5. Thus, the case with
is used for optimal threshold selection.
Figure 5 also shows the range of the bending moments variation during the ECD, based on which the threshold range can be selected.
To find the optimal thresholds, a group of contours are plotted for all the metrics under different load thresholds (, ). Then, an overall performance map with all the metrics taken into account is generated using a normalized weighted sum based on the metrics interest. The optimal point/region is used as a reference to select the optimal load thresholds. It should be noted that the lower bound () needs to be higher than the mean bending moment before the gust impinges on the rotor to avoid affecting the normal turbine operation, while the upper bound () needs to be smaller than the peak value to activate the GAC and reduce the peak loads. In these simulations, the SLC is turned on, the BCAW is added to the ROSCO, and the GAC is activated based on the corresponding thresholds.
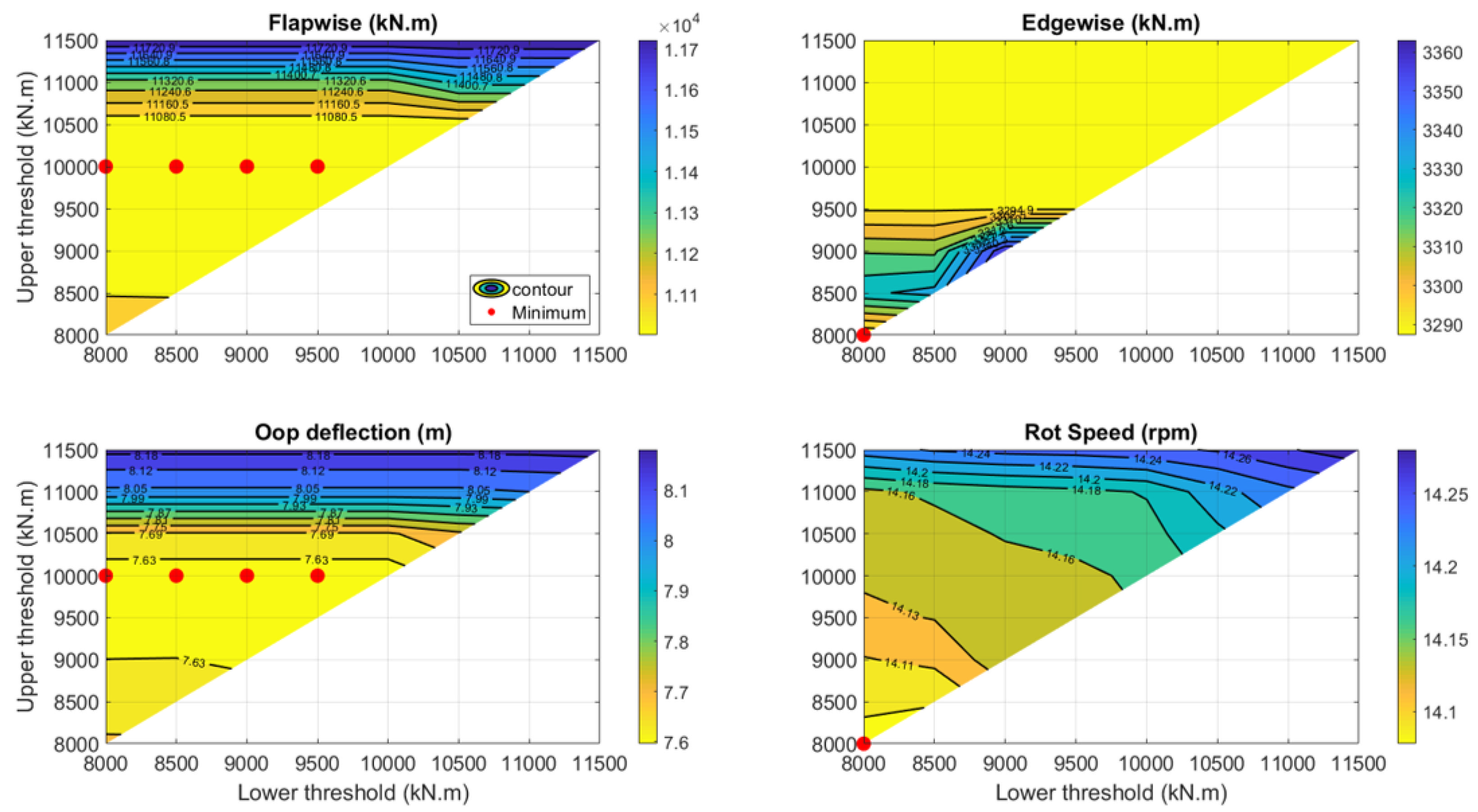
Figure 9 shows the contour plots for the primary evaluation criteria. Each contour plot shows the changes in the maximum transient value with respect to the thresholds. The maximum transient value is found within the 20 s window after the gust impinges on the rotor (100 to 120 s). The colorbars are shown to the right of the contour plots. Lighter color in the plot represents a lower peak value, which is favorable. The regions in yellow contain the best thresholds. The minimum peak values are marked with red dots for all the contour plots. Since the thresholds have to satisfy
, the contour map is in a triangle shape. With all the above considered, the thresholds for this case are from 8000 kN·m to 11,500 kN·m with increment of 500 kN·m. A total of 36 simulations are conducted to generate the contour maps.
The contour lines are mostly flat for the blade root bending moments and out-of-plane blade tip deflections. Therefore, we can either choose large hysteresis to avoid turning the controller on and off frequently, which is also beneficial with a noisy measurement, or to reduce the actuator-on time with smaller hysteresis.
From
Figure 9, we note that the contour plots of the blade root flapwise bending moments and out-of-plane deflections have the optimal region located in the middle region of the plots. This implies neither turning on the GAC too early nor too late is effective. For the edgewise bending moments, the minimum point is located at (8000 kN·m, 8000 kN·m). However, there is another optimal (yellow) region in the upper region of the plot. The minimum overspeed is at the (8000 kN·m, 8000 kN·m) point in the rotor speed contour plot. This is expected since the GAC can reduce the collective lift forces. The earlier we activate the GAC, the lower the overspeed can be achieved. The blade root edgewise bending moments and the rotor speed have less than 2% changes as compared to their minimum values. Thus, these two metrics are not significantly affected by the GAC.
To find the optimal combination of the upper and lower thresholds for the GAC, we need to take all the primary metrics into account. Normalization is needed since the metrics have different units. The metrics are first normalized with their minimum values on the contour plot. Then the percentage changes are calculated using Equation (
5),
where
are the peak values for metric
y with the thresholds
,
is the minimum value over all the calculated values, and
is the %-change value.
To combine the primary metrics, the weighted sum of the %-change map is calculated using Equation (
6),
where
n is the number of metrics,
is the
%-change from Equation (
5),
is the weighting factor associated with metric
, and
is the weighted sum of all the metrics. For this study, the weighting factors are all chosen to be one, thus assigning the same importance to all the primary metrics. However, the factors can vary based on the design requirements and operating constraints.
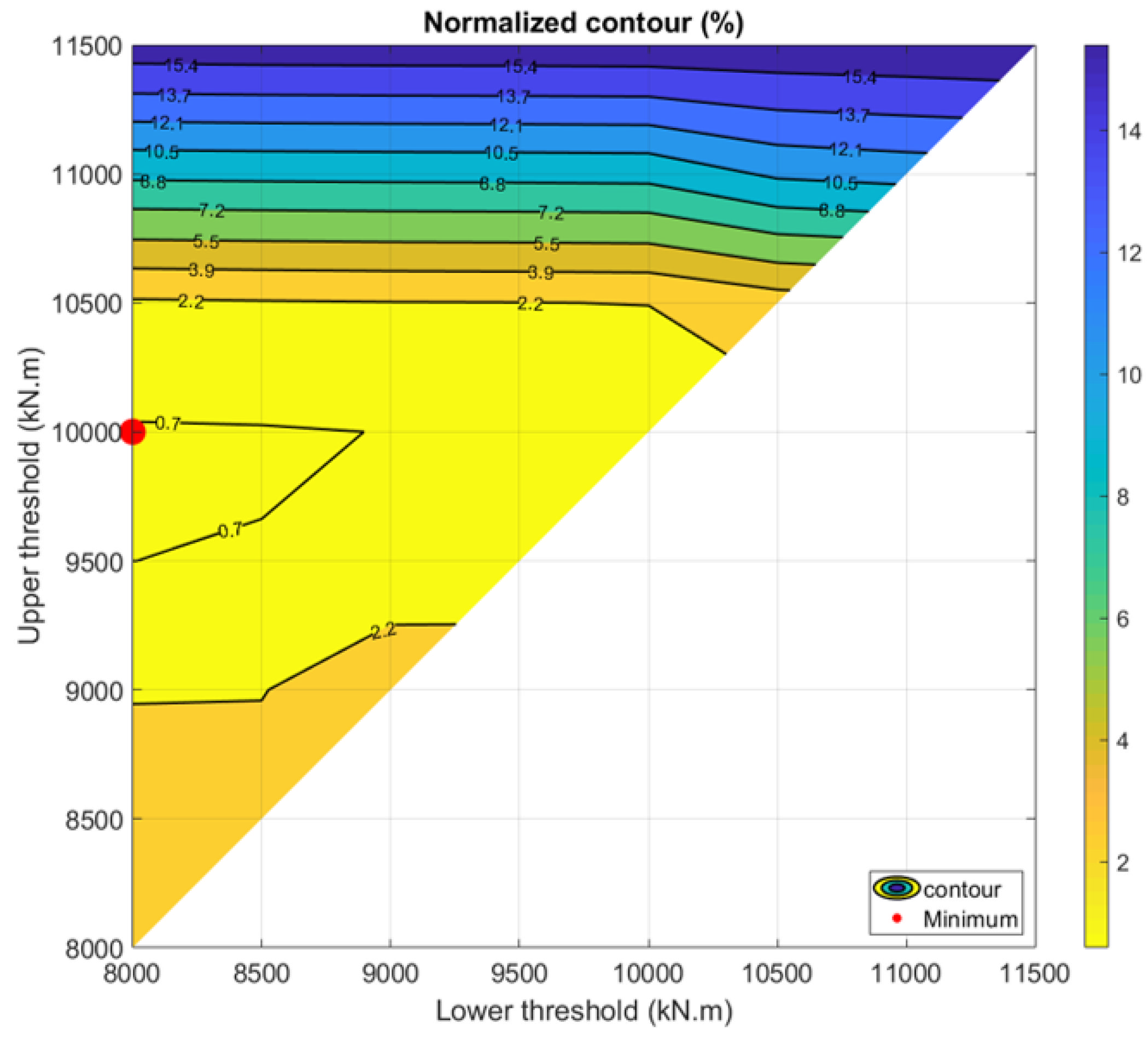
Figure 10 shows the %-change weighted sum contour plot. Theoretically, the optimal combination of the upper and lower thresholds would correspond to a point whose value equals zero, which means the combination has the lowest peak value on all the metrics. However, since the minimum points in each metric are attained with different thresholds, the minimum value under the current settings is
, which is shown with a red dot.
There are three points located in the optimal region (within the contour line of
) with little difference. For noisy measurements, large hysteresis is favorable. It can prevent turning the GAC on and off frequently, which can be considered an extra disturbance to the system. Thus, the optimal thresholds combination which minimizes overall percentage change metric and maximizes the hysteresis window is selected. The optimal thresholds
are chosen for this study. The numerical values for the parameters of ROSCO, SLC, and GAC controllers are summarized in
Table A1,
Table A2 and
Table A3, respectively, in
Appendix A.
5. Results
In this section, simulation results of selected DLC 1.2 and 1.4 cases described in
Section 3.1 are presented and analyzed. Performance of the GAC with optimal thresholds is evaluated and the peak values of primary and secondary responses introduced in
Table 3 are given. The GAC’s effects on turbine performance are evaluated under normal turbulence wind conditions following DLC 1.2. This is done because the gust events have a very short duration and would not affect the long-term turbine performance. The fatigue loads on blade root and tower base are also calculated under normal turbulence wind conditions in terms of DELs to check if there are any noticeable degradations in the fatigue loads due to deployment of the GAC. Three configurations are analyzed to evaluate the performance of the GAC: (1) ‘SLC Only’ (2) ‘SLC + GAC’ and (3) ‘SLC + GAC + BCAW’ (back-calculation anti-windup added to the ROSCO).
5.1. Primary and Secondary Criteria under Gust Wind
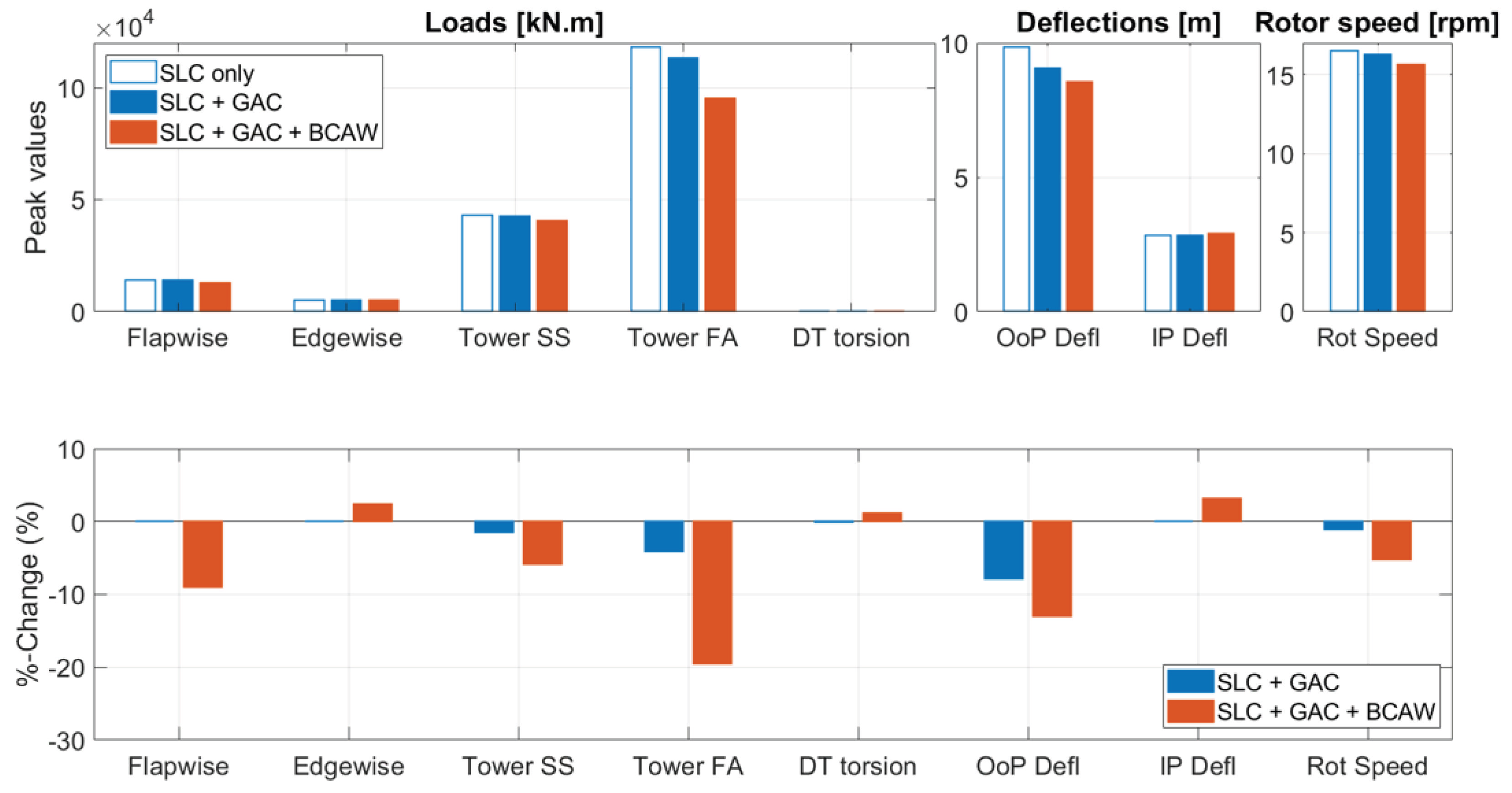
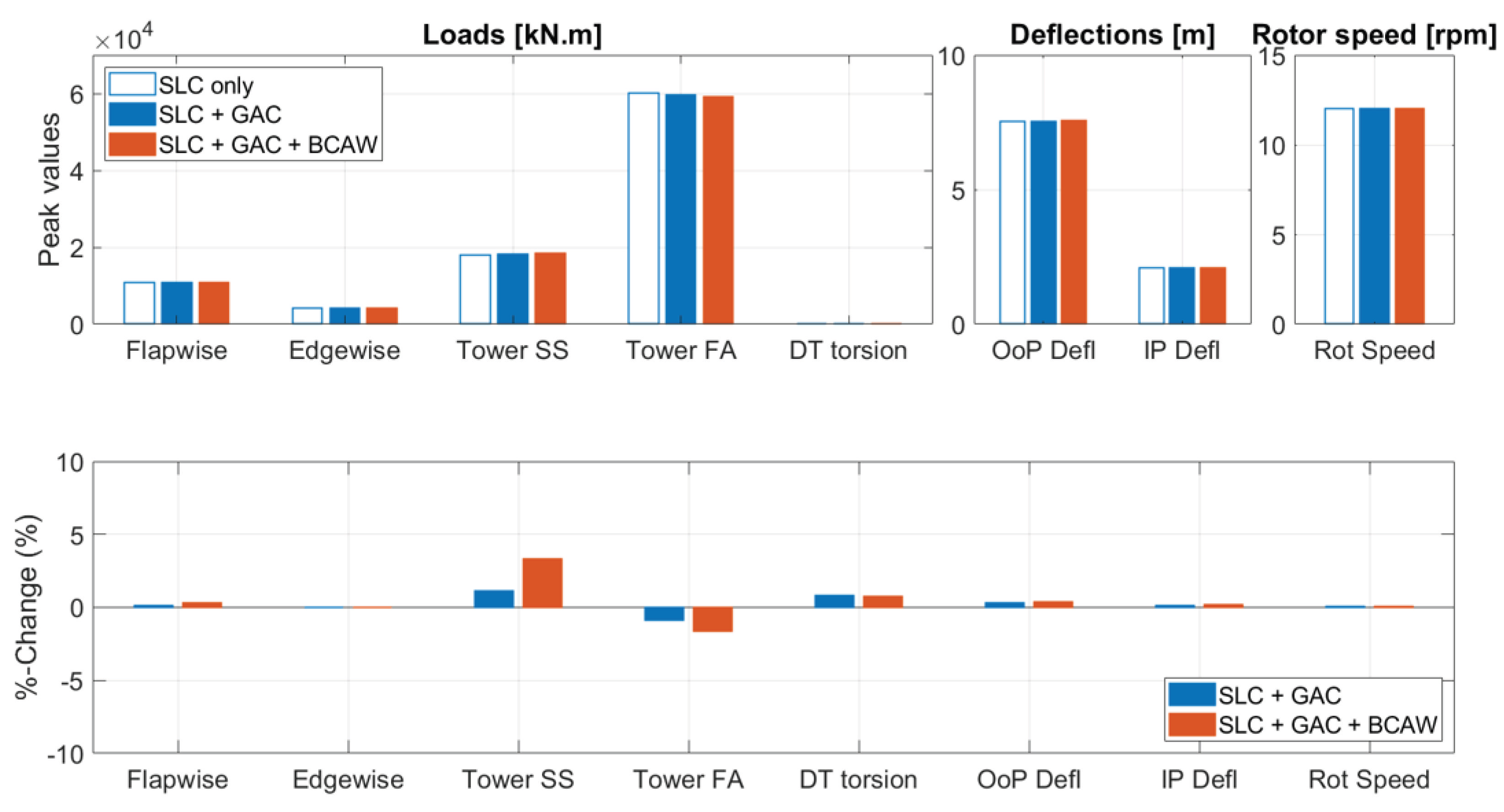
Figure 11 shows the results for all metrics in the evaluation criteria under gust wind. The top plot shows the maximum absolute transient (peak) values. The corresponding percentage changes with respect to ‘SLC only’ case are plotted in the bottom graph.
By comparing the ‘SLC Only’ with the ‘SLC + GAC’, we observe that by adding the GAC, all metrics either reduce or remain at the same level. Specifically, the GAC can reduce the peak bending moments on the blade root and tower base by up to 6%, and can reduce the peak blade tip out-of-plane and in-plane deflections by up to 10%. No significant reductions in drive-train torsional moment, blade root edgewise bending moments and rotor speed are observed.
We also investigate and quantify the improvement in gust alleviation by modifying the baseline turbine controller (ROSCO) to include BCAW. By comparing the ‘SLC + GAC’ with the ‘SLC + GAC + BCAW’, we observe that the BCAW can further reduce the peak value of some metrics without any significant drawbacks. With BCAW, peak values of blade root flapwise bending moments, tower base fore-aft bending moment, and out-of-plane deflections are reduced by 18%, 14% and 23% respectively. All of the metrics, except the blade tip in-plane deflections, show a higher reduction as compared to the ‘SLC + GAC’.
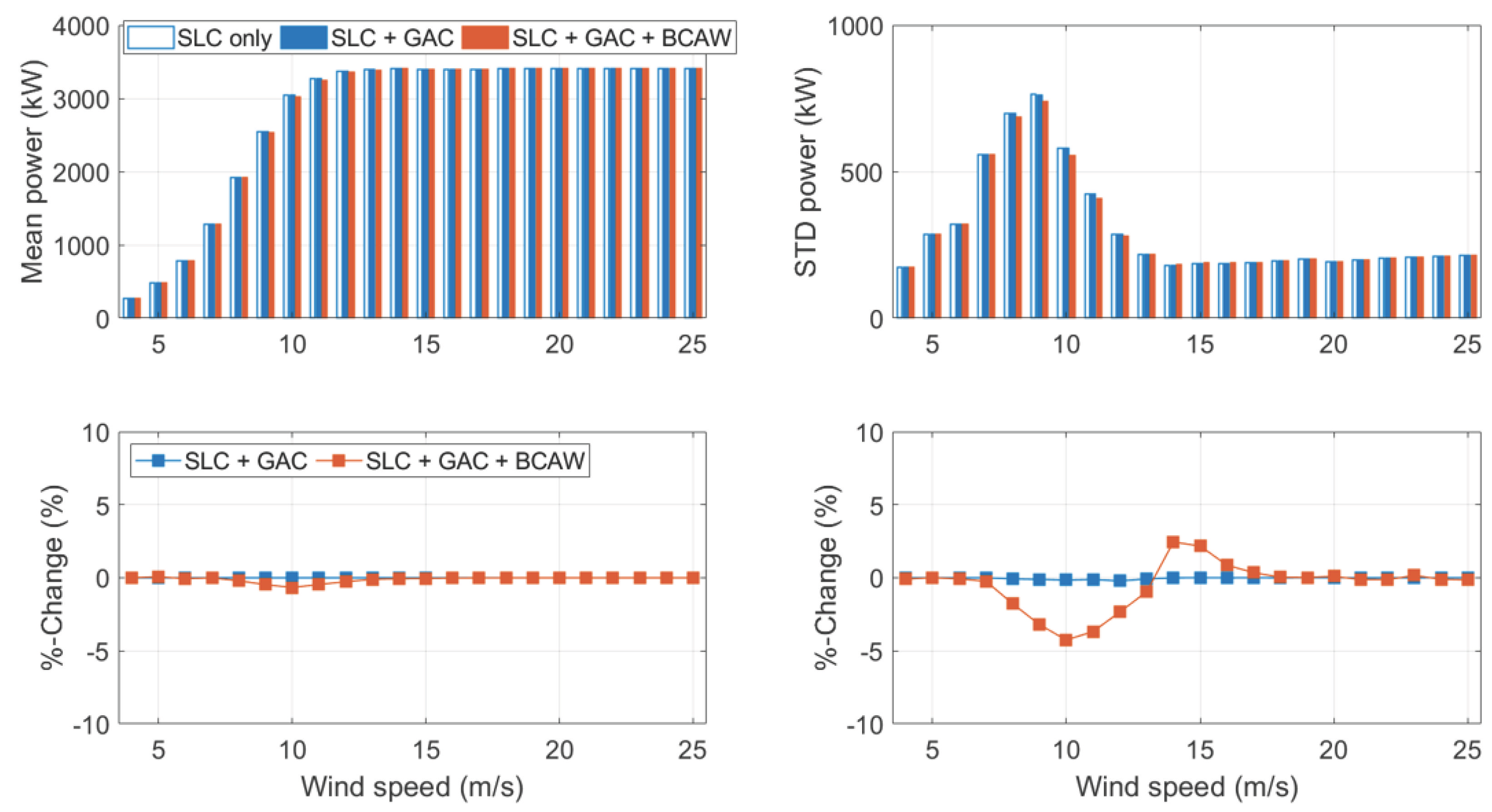
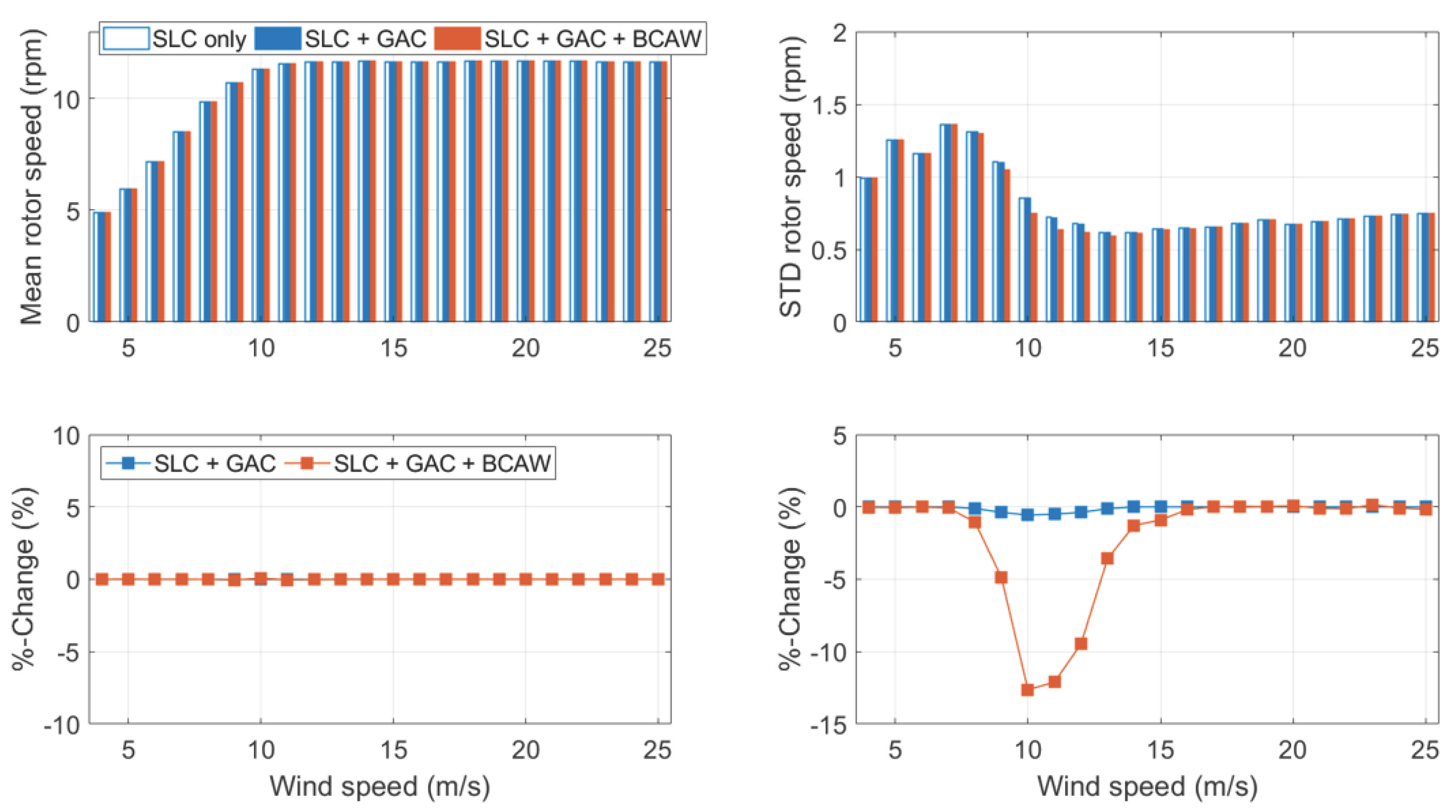
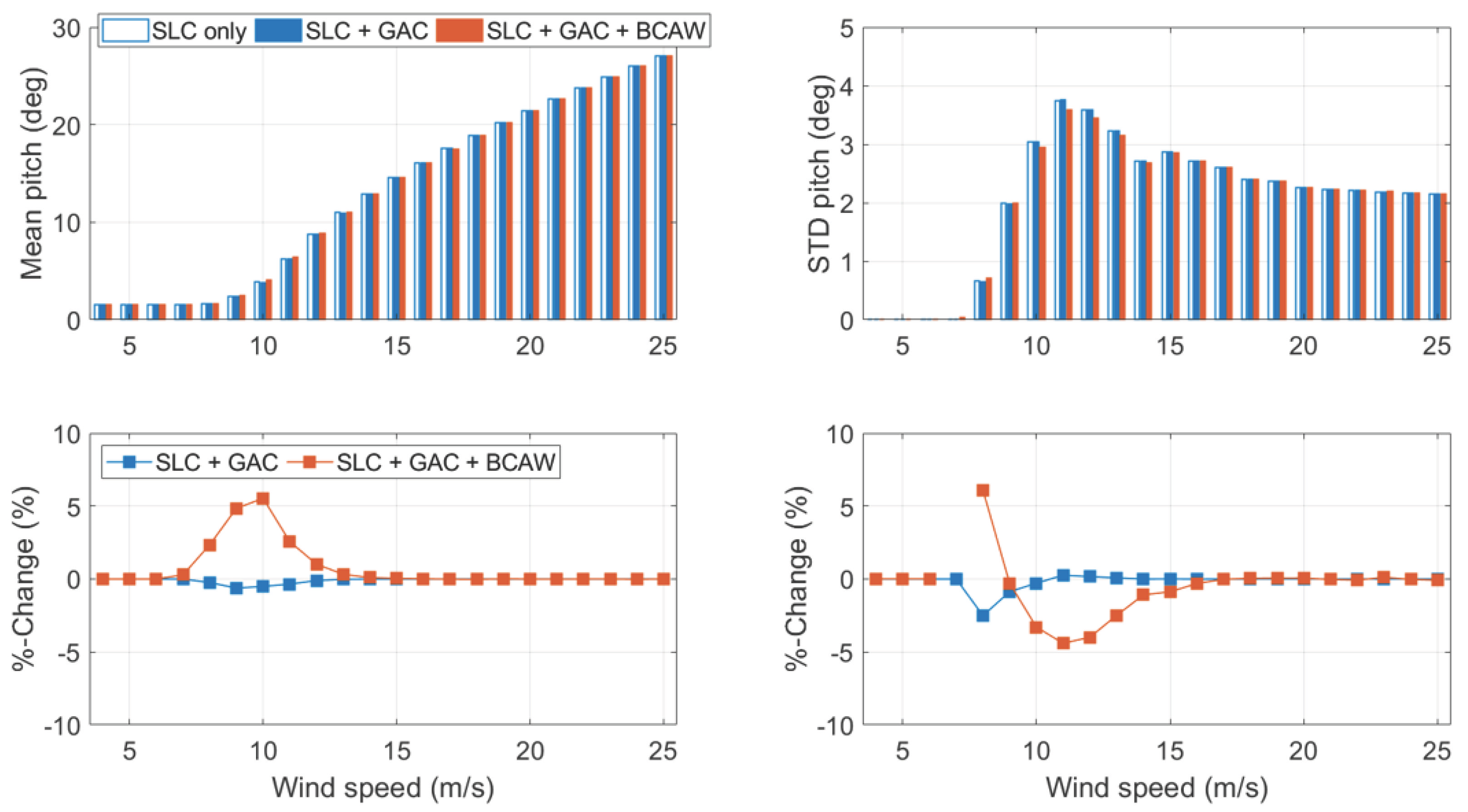
5.2. Effect on Turbine Performance under Normal Operating Conditions
The peak value comparison in the previous section demonstrates extreme load reduction under gust wind conditions. Since the loads can go beyond the threshold in the presence of turbulence as well, the GAC could affect the turbine performance under normal turbulence wind conditions. Therefore, the mean and standard deviation of rotor speed, pitch angle, and generator power are evaluated in this section to ensure that the turbine outputs are not affected by GAC during normal turbine operation.
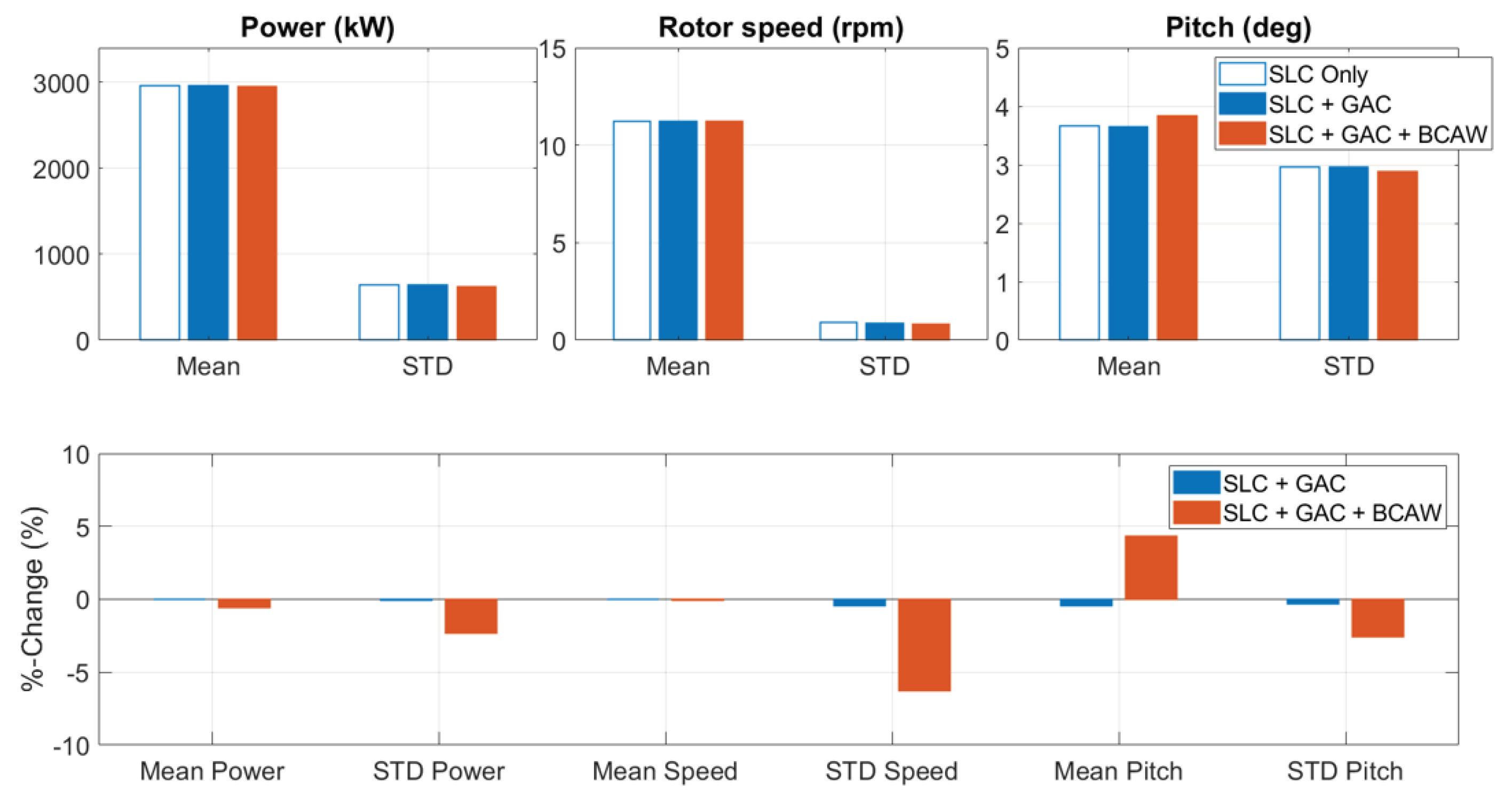
Figure 12 shows the absolute values and the percentage changes in the turbine performance under different controller configurations. By comparing the ‘SLC Only’ with the ‘SLC + GAC’, we observe that all performance metrics are virtually unaffected (within 0.5% change). This means the GAC with the optimal thresholds does not have any negative effects on the turbine performance. This is as expected since the loads go beyond the threshold for a very small amount of time under the normal turbulence wind.
By comparing the ‘SLC + GAC’ with the ‘SLC + GAC + BCAW’, we observe that the BCAW results in lower standard deviations and similar mean values except for the mean pitch angle. Specifically, mean power and mean rotor speed are virtually the same (within 0.5% change). The increase in the mean pitch angle is because the BCAW can bring the pitch command out of saturation faster than standard ROSCO, which allows better tracking when the turbulent wind exceeds its rated value. Standard deviations of power, rotor speed and pitch are reduced by 2.3%, 6.2% and 2.5%, respectively. The reduction of standard deviation shows that the turbine is operating in a relatively stable condition.
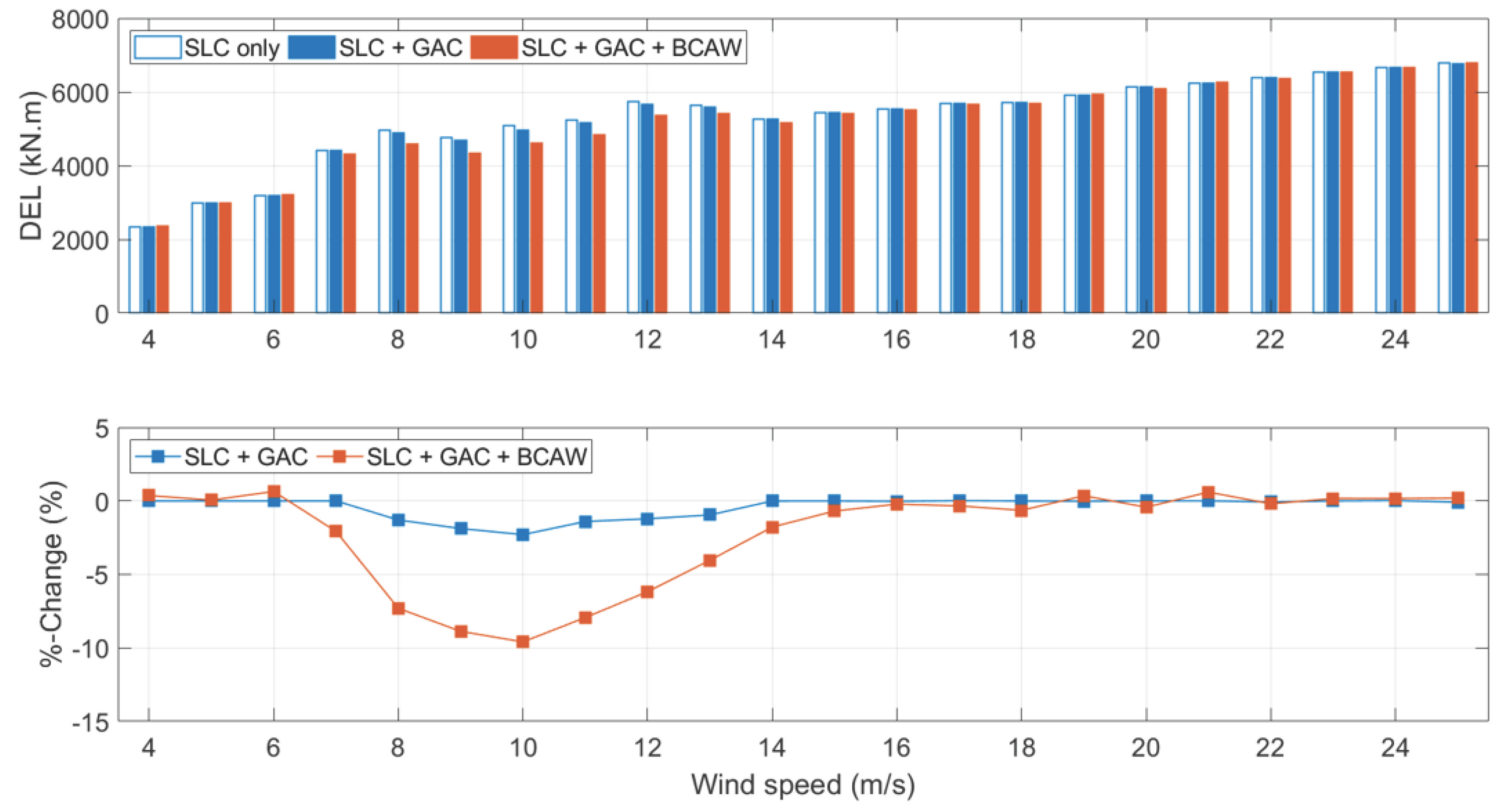
5.3. Fatigue Load Evaluation under Normal Operating Conditions
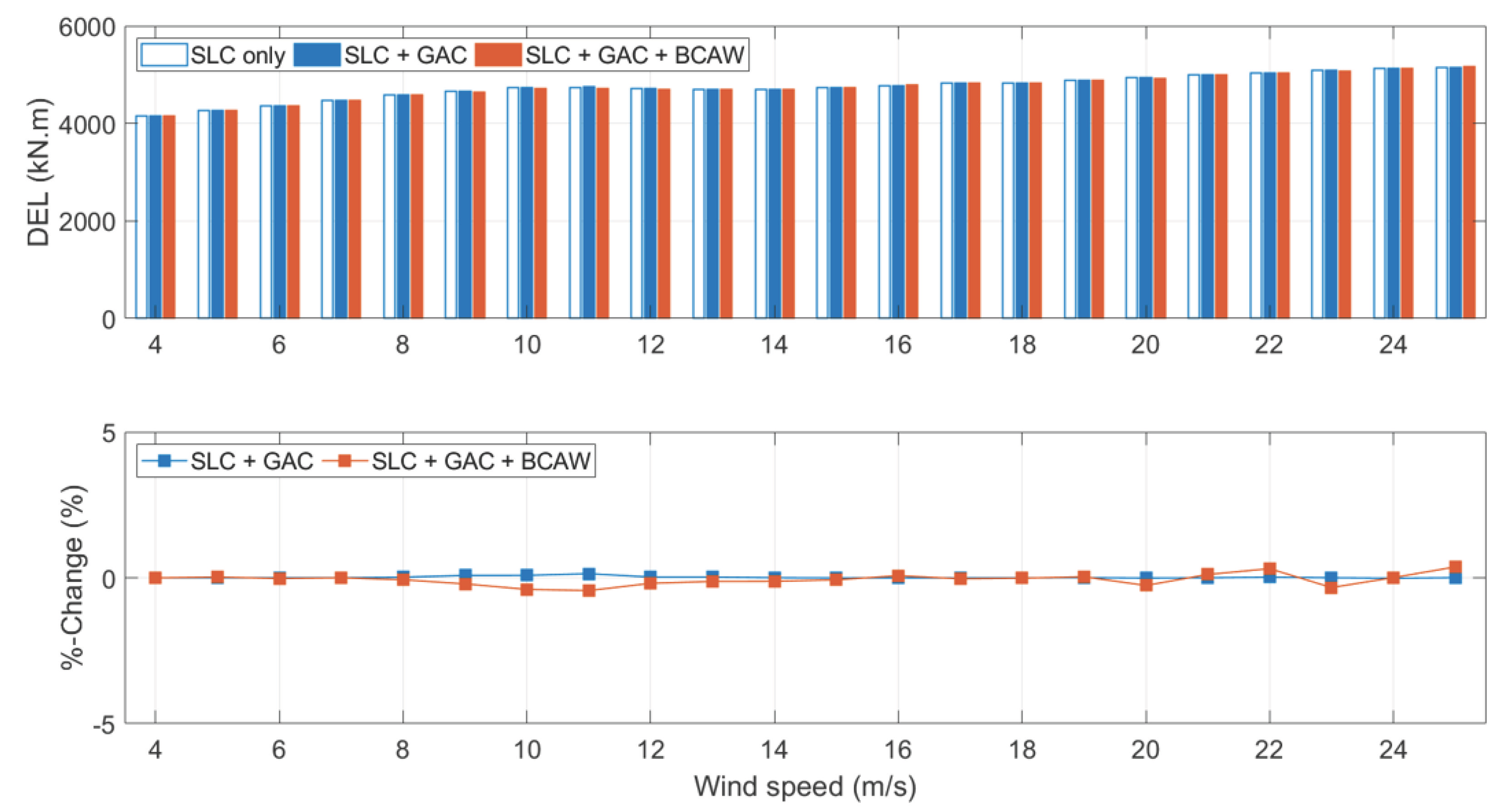
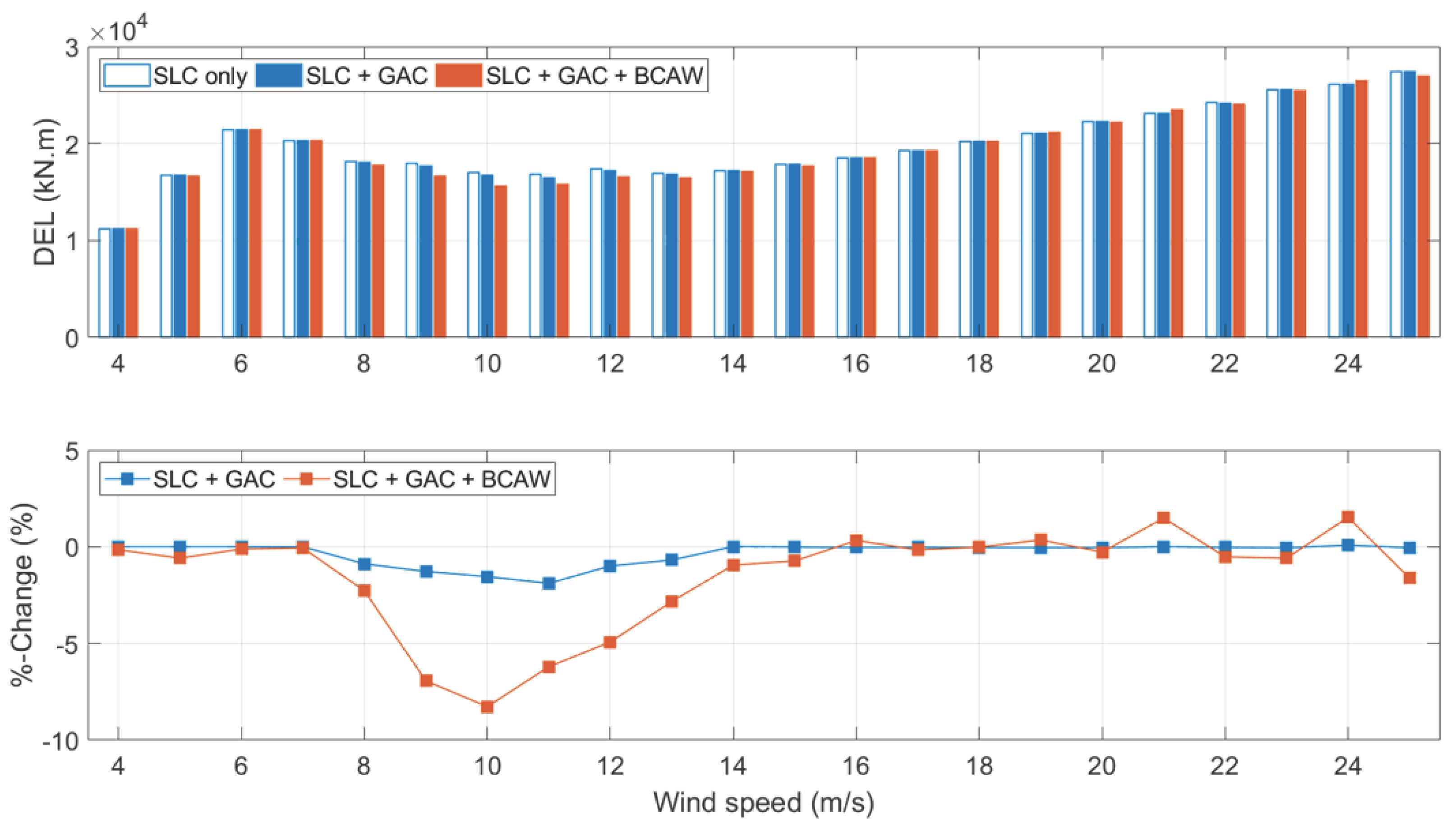
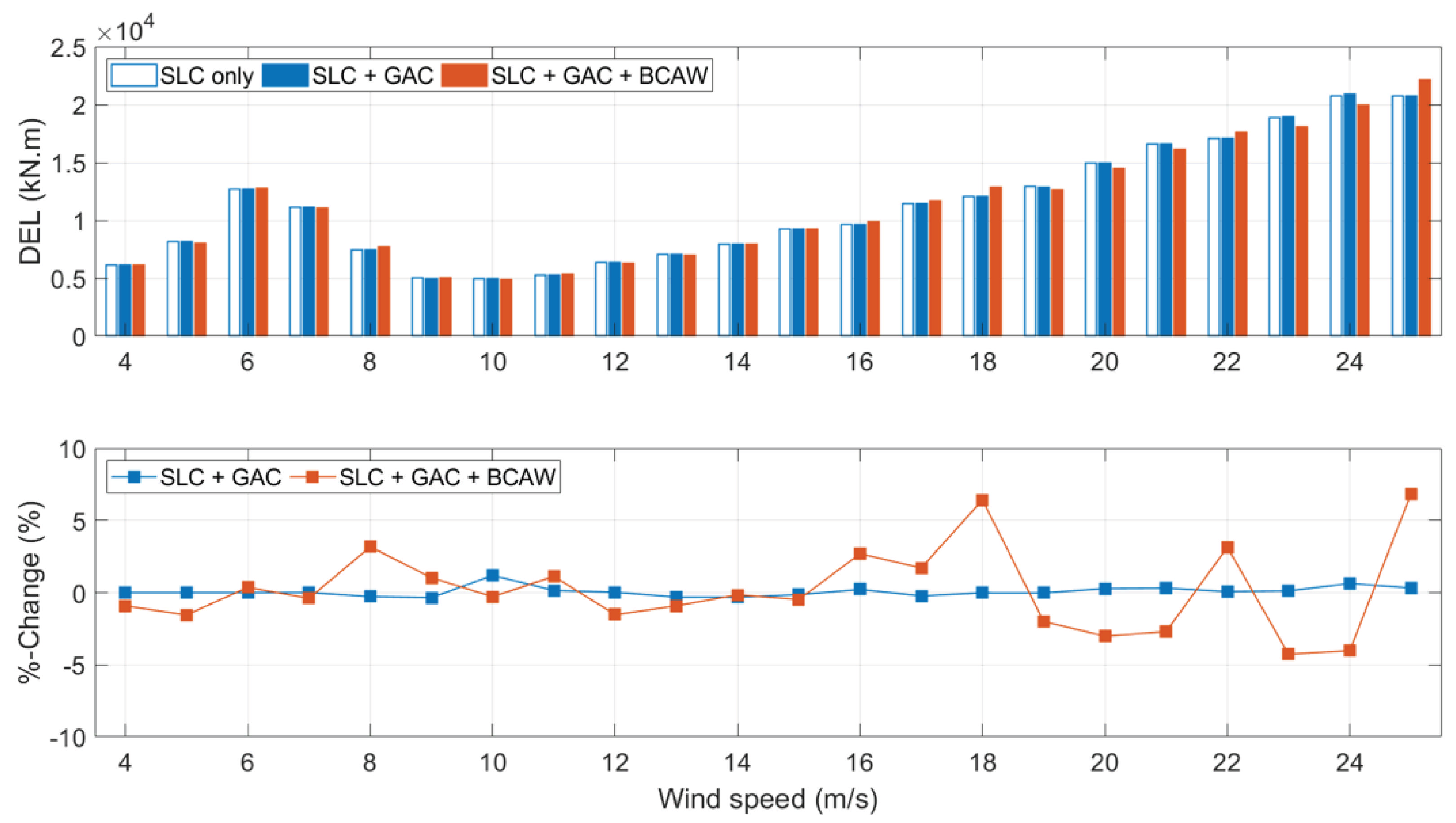
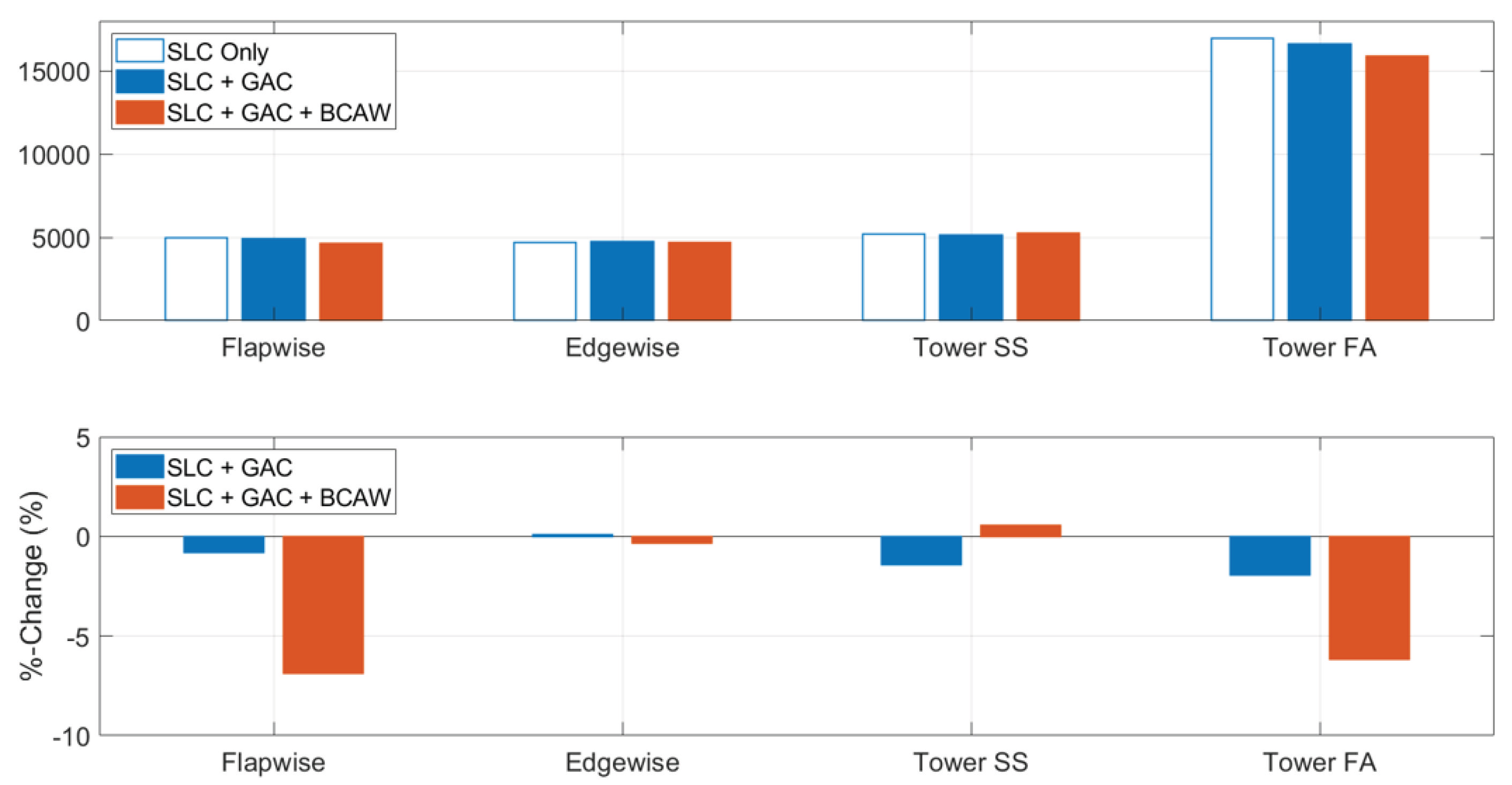
Fatigue loads are also evaluated with different controller configurations under normal turbulence wind conditions.
Figure 13 shows the DEL variations at the blade root and tower base with different control architectures. Overall, the metrics are either reduced or remain at the same level.
By comparing the ‘SLC Only’ with the ‘SLC + GAC’, we observe that the GAC does not affect the flapwise blade root bending moment DELs in any significant way. There is an approximate 2% reduction in tower base DELs. Therefore, the GAC has a slight positive effect on tower fatigue loads. Adding the BCAW results in significant DEL reductions in blade root flapwise bending moments and tower base fore-aft bending moments as compared to the baseline (‘SLC Only’). The DELs of blade root flapwise bending moments and tower base fore-aft bending moments have extra 6.9% and 6.2% reductions as compared to the ‘SLC Only’. The other two metrics show less than 1% change.
Further results on turbine performance, fatigue loads and extreme peak values (from cut-in to cut-out wind speed) are presented in
Appendix B. These additional evaluations are conducted following the IEC standard Design Load cases 1.2, 1.3 and 1.5, as listed in
Table A4. In this way, all the conditions required by the ‘power production’ case of the IEC standard are evaluated with our proposed controller.
6. Conclusions
This paper describes a methodology for the design and evaluation of a feedback control system using lift actuators to alleviate extreme loads and deflections under gust wind. It also describes a switching scheme to integrate the GAC into turbines with the fatigue load controller (SLC) to achieve extreme loads and deflections reduction while maintaining the fatigue load reduction capability. Moreover, modifications in the turbine controller (ROSCO) are proposed to further reduce extreme loads and deflections and to improve turbine performance.
Key features of the method presented include:
The GAC uses simple switching logic with hysteresis to activate the GAC under extreme loads only and does not affect the normal operation of the turbine equipped with SLC.
The optimal thresholds for the GAC are selected based on a weighted sum of the normalized evaluation metrics.
The performance evaluation is based on the IEC standard. Simulations are conducted under gust wind conditions to evaluate the extreme loads and deflections. Turbulent wind condition simulations are conducted to evaluate the GAC’s effects on power production, turbine performance and fatigue loads.
The method is demonstrated with a 3.4-MW turbine [
3] modified to incorporate sectional lift actuation on each blade. Based on the results of this study, the GAC can reduce the primary extreme loads and deflections by up to 10% under the ECD gust wind. The secondary loads and deflections are either reduced or unchanged. Moreover, the GAC does not affect the turbine performance and fatigue loads in any significant way under the normal turbulent wind.
The modified turbine controller (with BCAW) can further reduce the extreme loads and deflections by up to 23%. The extreme values of most of the primary and secondary metrics are reduced as compared to cases without BCAW, except the blade tip in-plane deflection which remains at the same level as the ‘SLC Only’ case. For turbine performance, adding the BCAW can reduce the standard deviation of rotor speed, pitch angle and generator power by up to 6.2%. The reduction in STD means the turbine’s key outputs such as power, rotor speed and blade pitch exhibit less fluctuation. The ‘SLC + GAC + BCAW’ case also shows extra reductions in fatigue loads measured by DELs. The blade root flapwise and tower base fore-aft bending moment DELs show up to 6.9% reduction under turbulent wind as compared to the ‘SLC Only’ case.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}