
Research on Underground Coal Mine Map Construction Method Based on LeGO-LOAM Improved Algorithm


Abstract
:1. Introduction
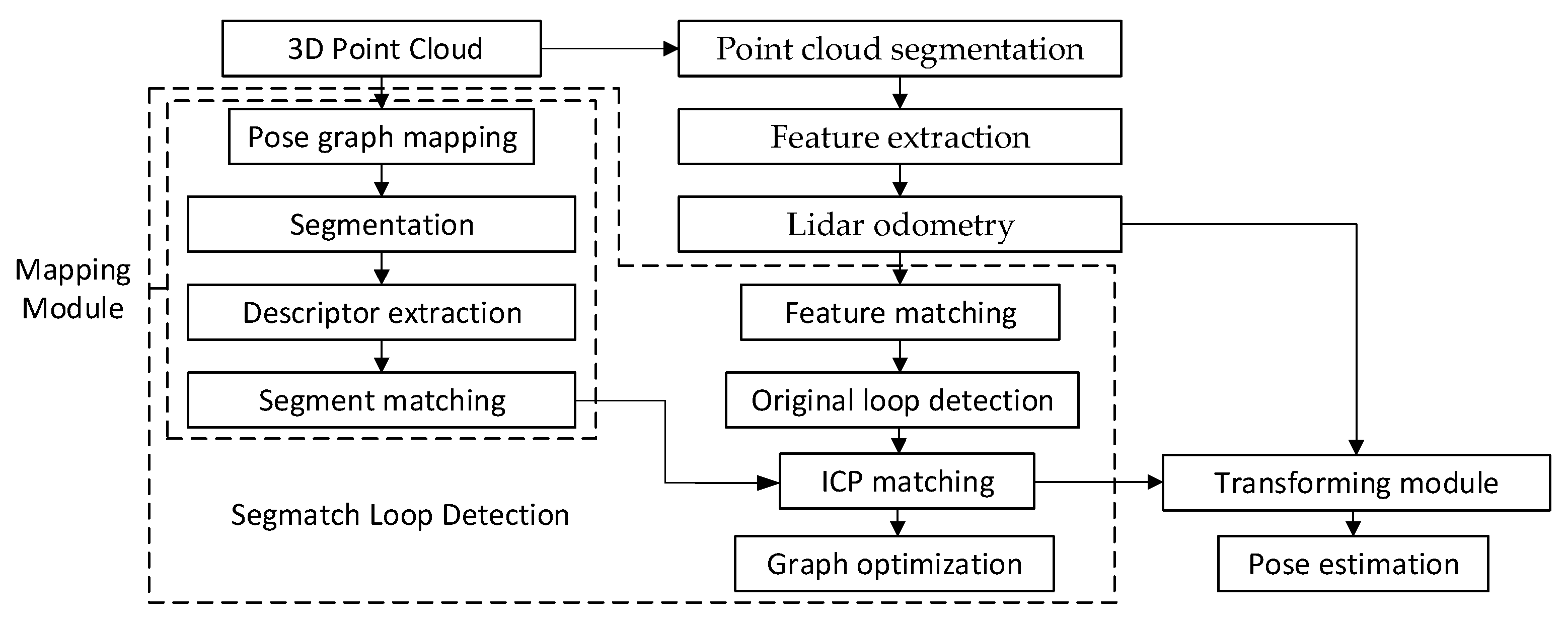
2. Algorithm Principle
- (1)
- Segmentation
- (2)
- Feature extraction
- (3)
- Segment match
- (4)
- Geometric verification
- (5)
- Loopback detection
3. The KITTI Dataset Test
3.1. Comparison of Mapping Results
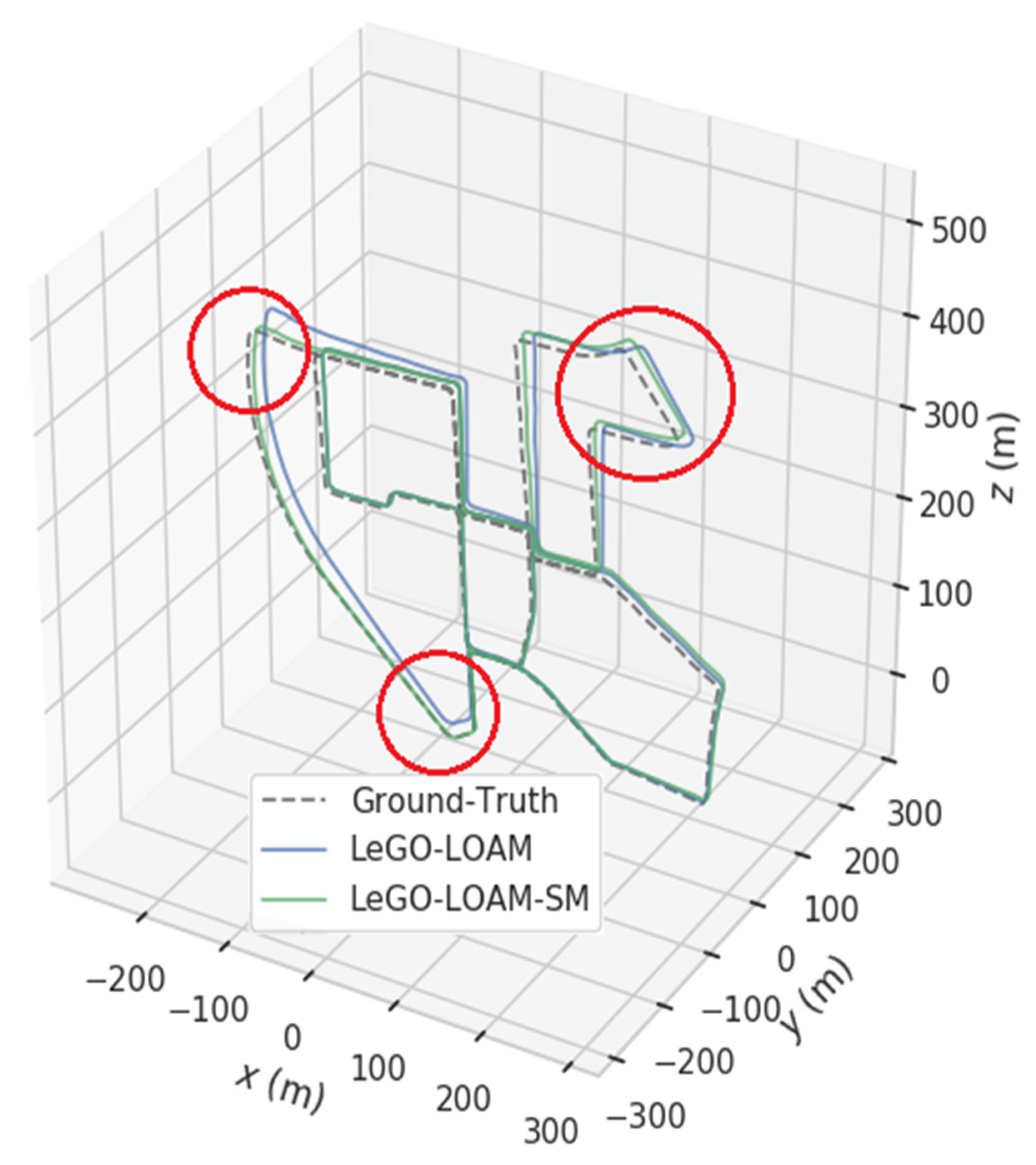
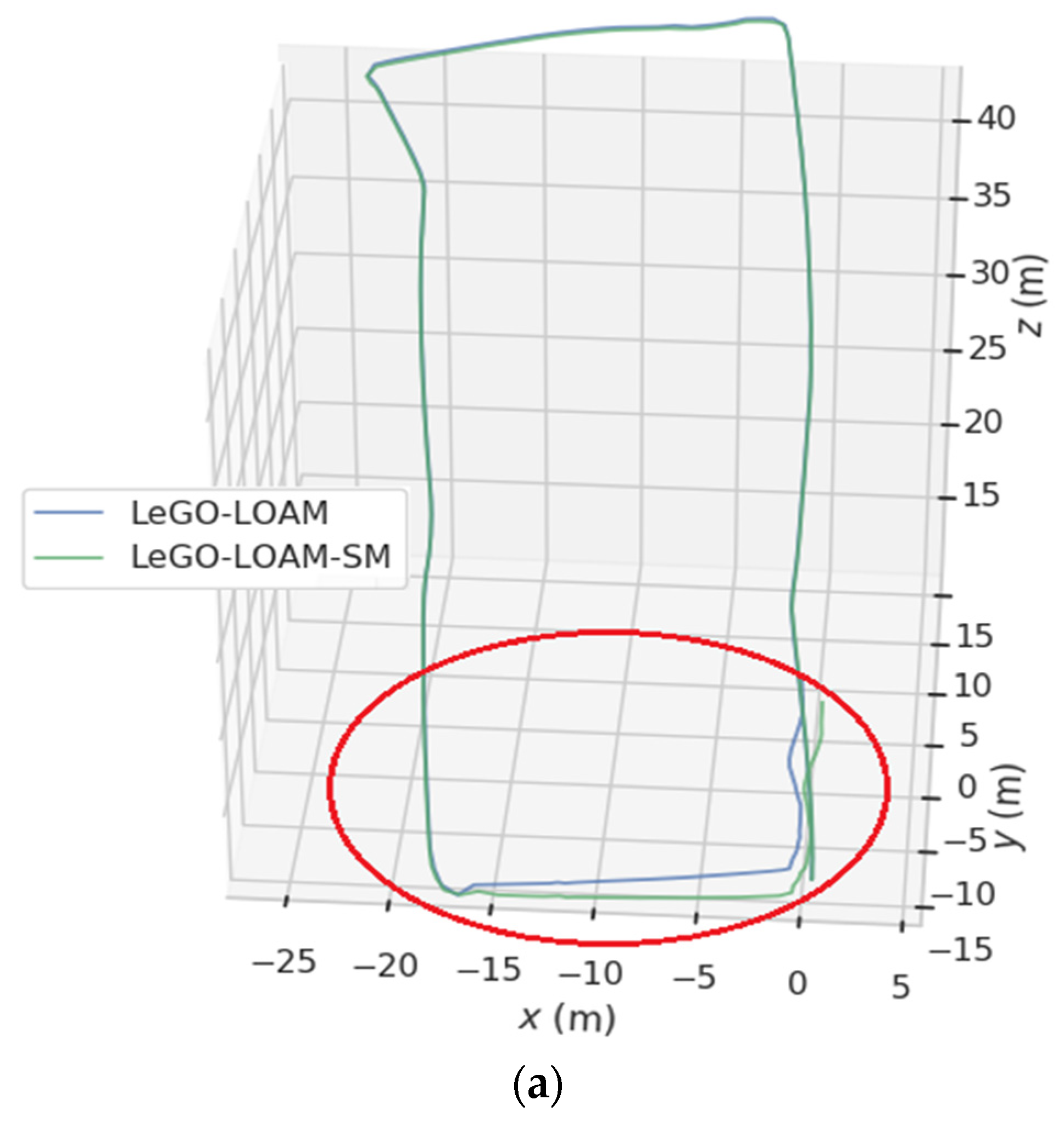
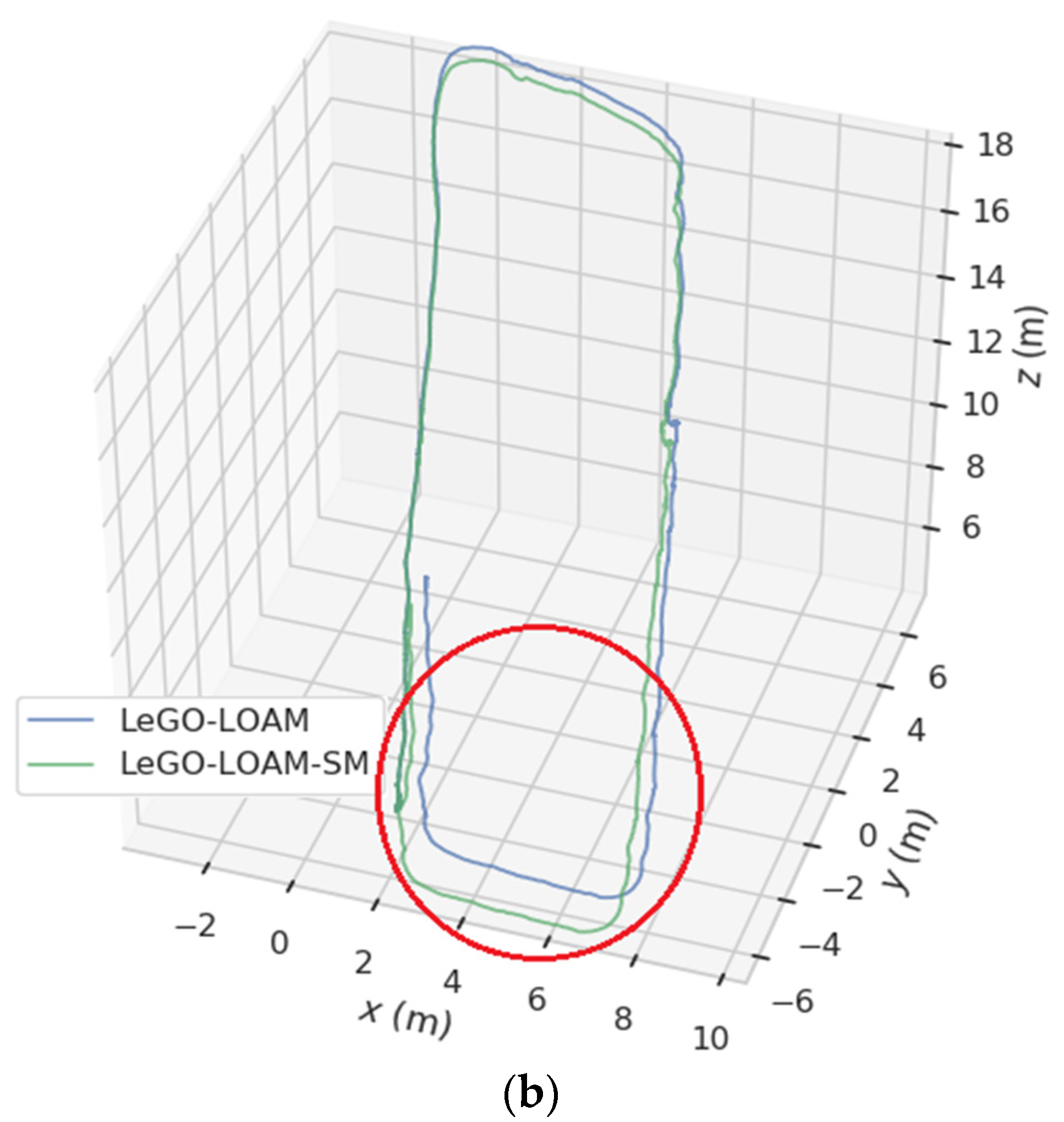
3.2. Trajectory Comparison
3.3. Estimated Trajectory Length Deviation
3.4. Absolute Trajectory Error and Relative Pose Error
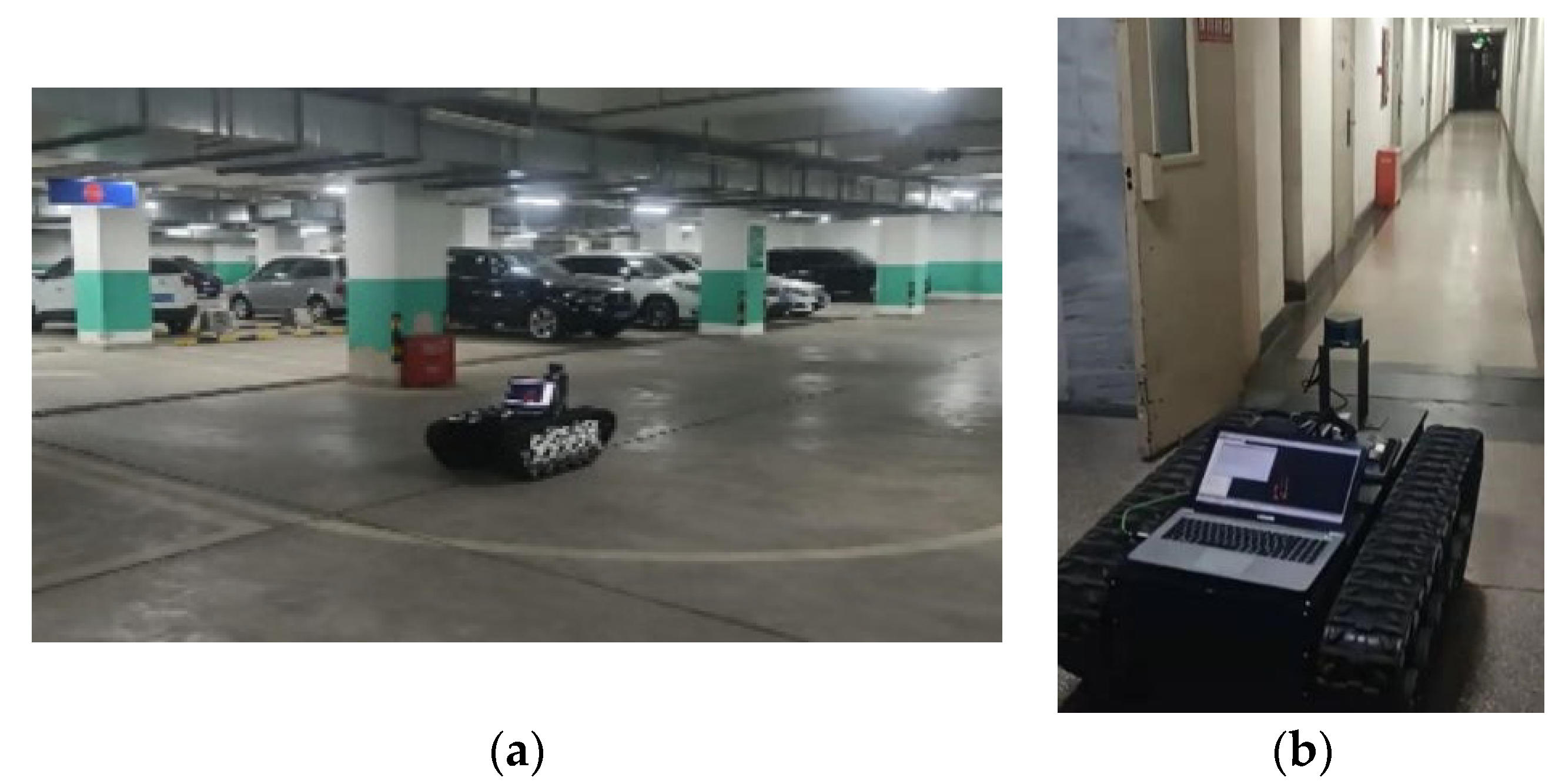
4. Experimental Verification of Practical Scenarios
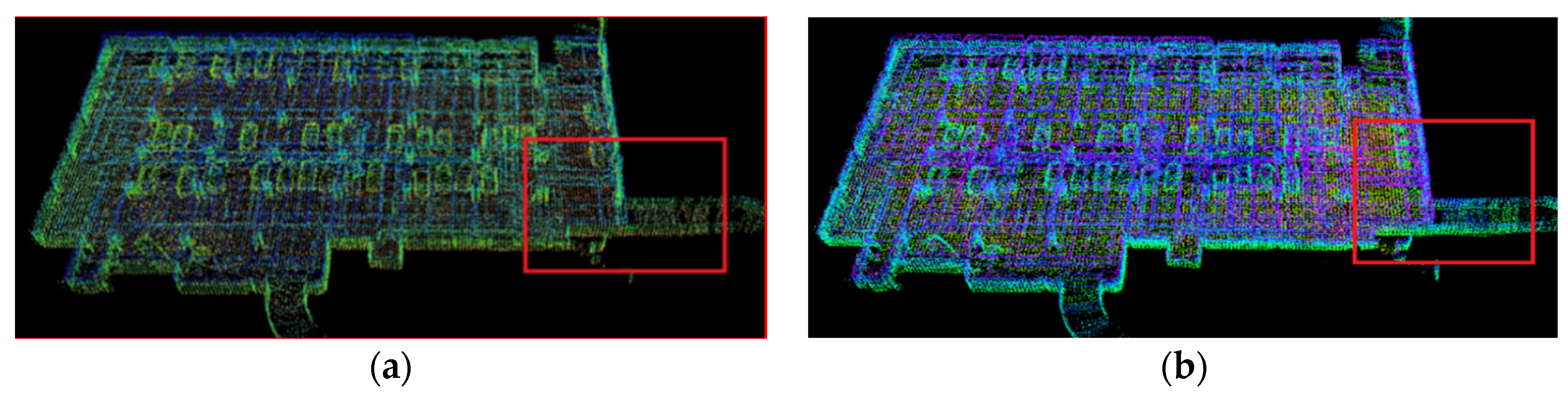
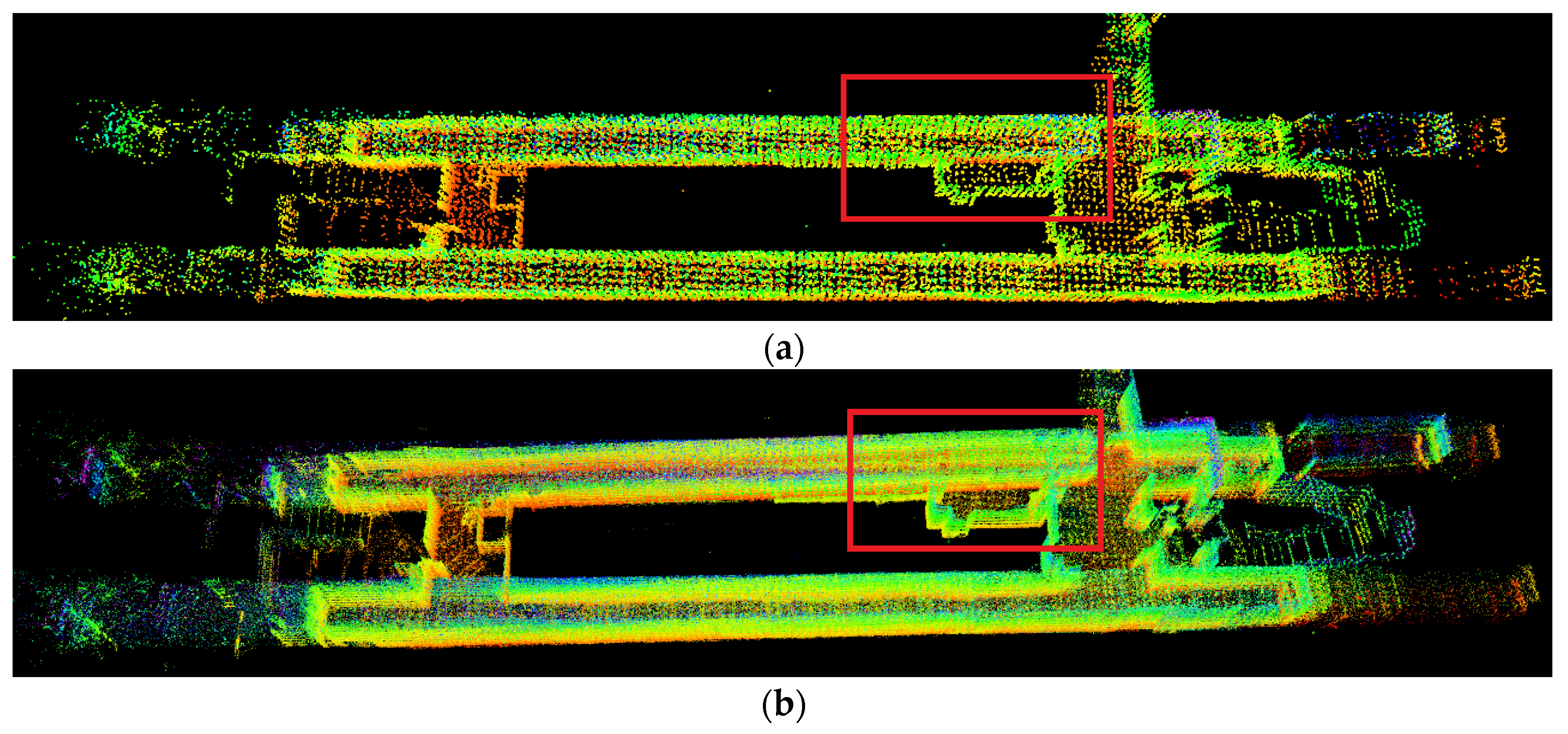
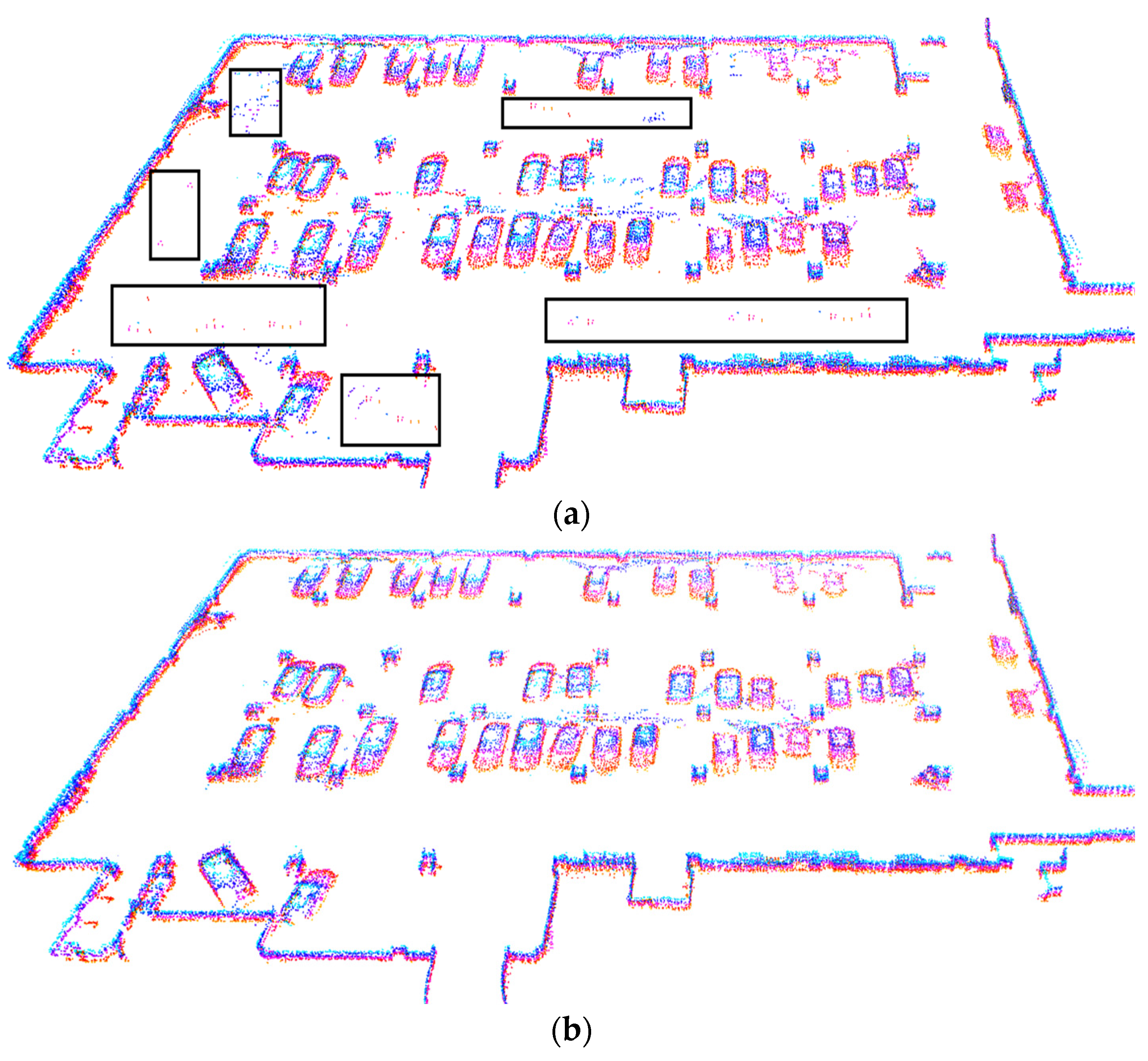
4.1. Comparison of Build Results
4.2. Trajectory Comparison
5. Construction of Occupancy Grid Map
5.1. Comparison of Build Results
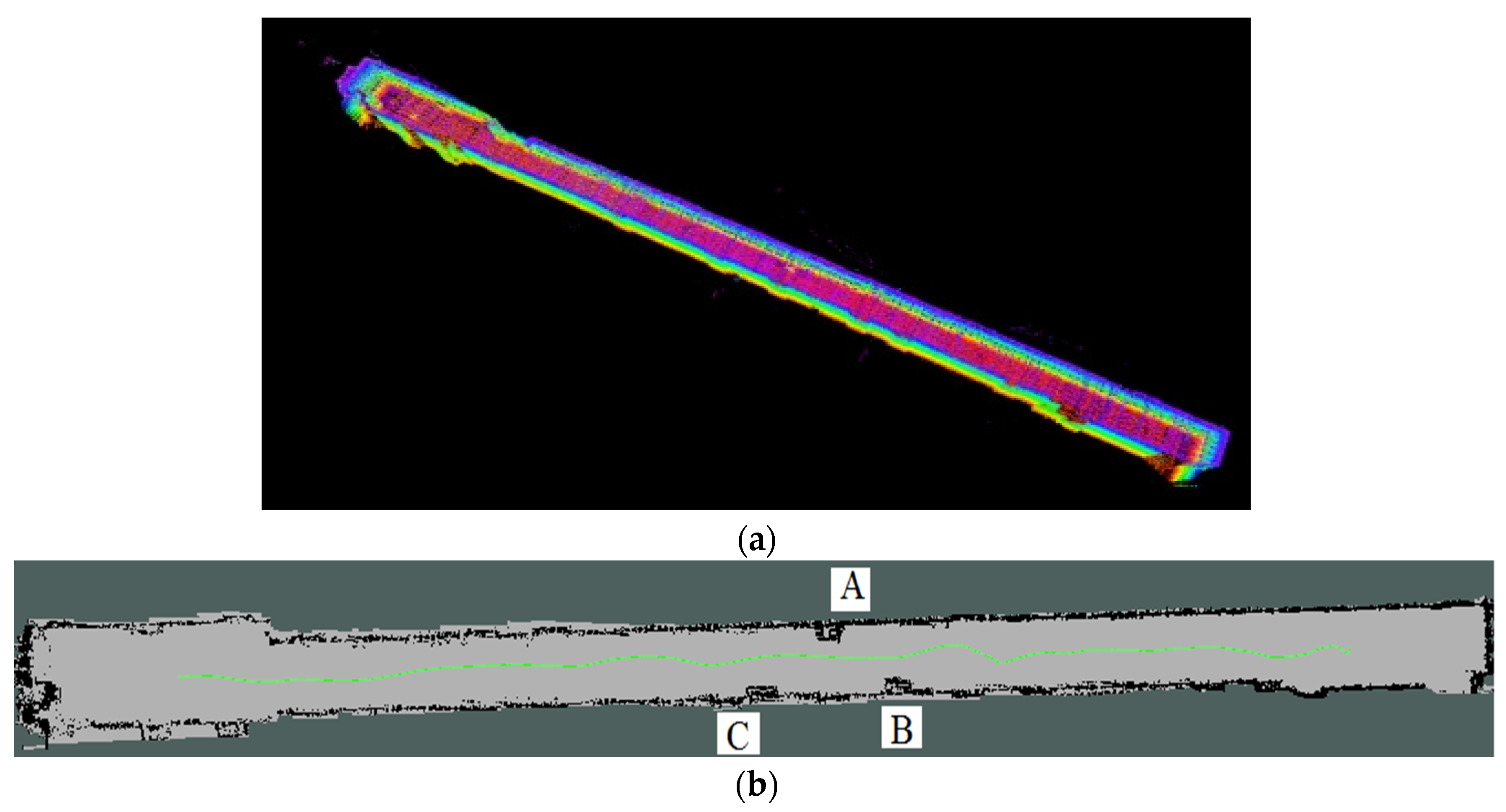
5.2. Two-Dimensional Occupancy Grid Map Construction
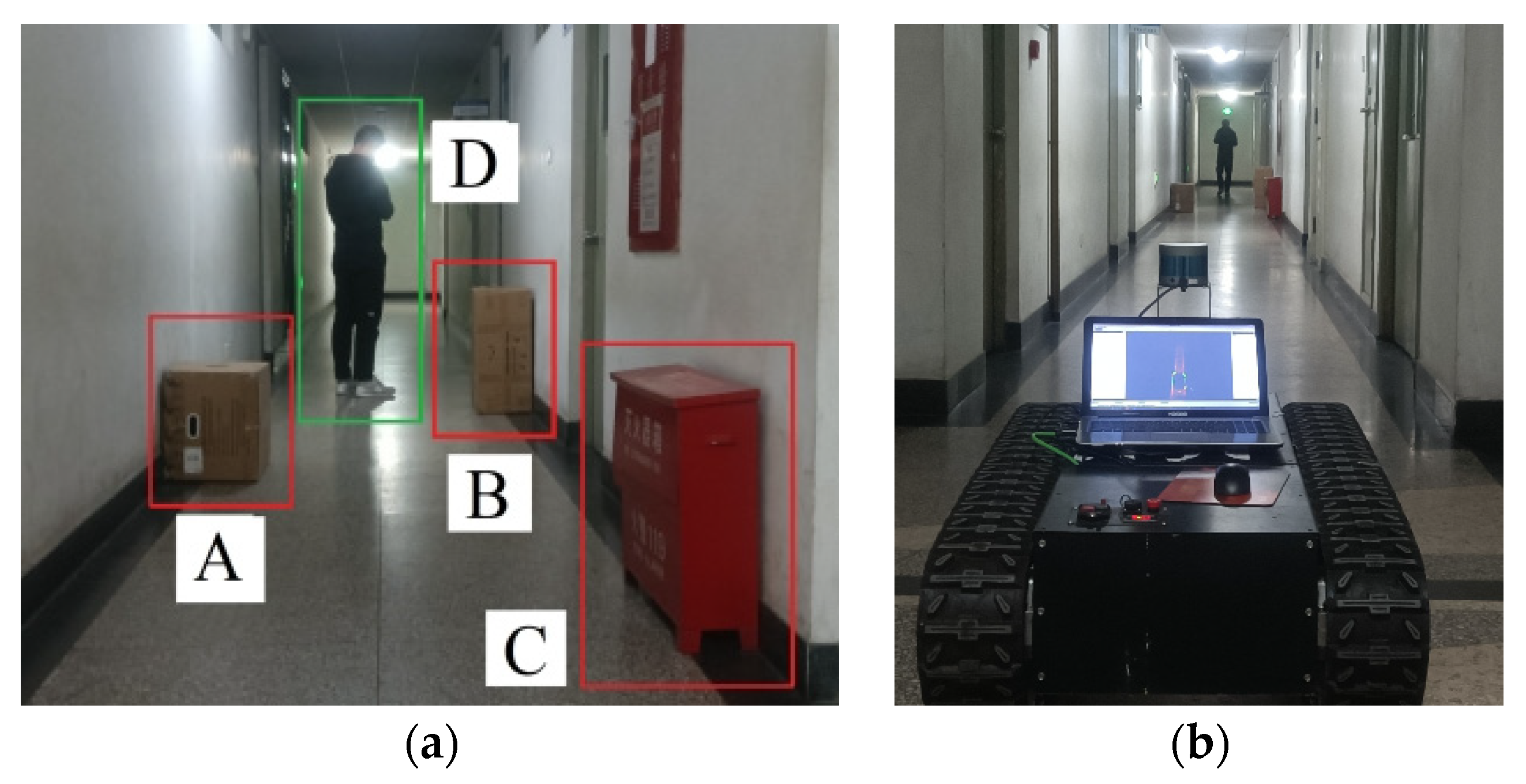
5.3. Simulation of Closed and Narrow Coal Mine Underground Environment Test
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Shirong, G.E.; Eryi, H.U.; Wenliang, P.E.I. Classification system and key technology of coal mine robot. J. China Coal Soc. 2020, 45, 455–463. [Google Scholar] [CrossRef]
- Jianjian, Y.; Qiang, Z.; Chao, W.; Boshen, C.; Xiaolin, W.; Shirong, G.; Miao, W. Status and development of robotization research on roadheader for coal mines. J. China Coal Soc. 2020, 45, 2995–3005. [Google Scholar] [CrossRef]
- Smith, R.C.; Cheeseman, P. On the representation and estimation of spatial uncertainty. Int. J. Robot. Res. 1986, 5, 56–68. [Google Scholar] [CrossRef]
- Durrant-Whyte, H.F. Consistent integration and propagation of disparate sensor observations. Inter-Natl. J. Robot. Res. 1987, 6, 3–24. [Google Scholar] [CrossRef]
- Huang, L. Review on LiDAR-based SLAM Techniques. In Proceedings of the 2021 International Conference on Signal Processing and Machine Learning (CONF-SPML), Beijing, China, 18–20 August 2021. [Google Scholar] [CrossRef]
- Taheri, H.; Xia, Z.C. SLAM; definition and evolution. Eng. Appl. Artif. Intell. 2021, 97, 104032. [Google Scholar] [CrossRef]
- Qin, T.; Li, P.; Shen, S. VINS-Mono: A Robust and Versatile Monocular Visual-Inertial State Estimator. IEEE Trans. Robot. 2018, 34, 1004–1020. [Google Scholar] [CrossRef]
- Zhang, T.; Zhang, H.; Li, Y.; Nakamura, Y.; Zhang, L. FlowFusion: Dynamic Dense RGB-D SLAM Based on Optical Flow. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020. [Google Scholar] [CrossRef]
- Campos, C.; Elvira, R.; Rodríguez, J.J.G.; Montiel, J.M.M.; Tardós, J.D. Orb-slam3: An accurate open-source library for visual, visual–inertial, and multimap slam. IEEE Trans. Robot. 2021, 37, 1874–1890. [Google Scholar] [CrossRef]
- Chen, X.; Milioto, A.; Palazzolo, E.; Giguère, P.; Behley, J.; Stachniss, C. SuMa++: Efficient LiDAR-based Semantic SLAM. In Proceedings of the International Conference on Intelligent Robots and Systems (IROS), Macau, China, 4–8 November 2019. [Google Scholar] [CrossRef]
- Li, K.; Li, M.; Hanebeck, U.D. Towards high-performance solid-state-lidar-inertial odometry and mapping. IEEE Robot. Autom. Lett. 2021, 6, 5167–5174. [Google Scholar] [CrossRef]
- Bai, C.; Xiao, T.; Chen, Y.; Wang, H.; Zhang, F.; Gao, X. Faster-LIO: Lightweight Tightly Coupled Lidar-Inertial Odometry Using Parallel Sparse Incremental Voxels. IEEE Robot. Autom. Lett. 2022, 7, 4861–4868. [Google Scholar] [CrossRef]
- Chen, Y.; Tang, J.; Hyyppä, J.; Wen, Z.; Li, C.; Zhu, T. Mobile laser scanning based 3D technology for mineral environment modeling and positioning. In Proceedings of the 2016 Fourth International Conference on Ubiquitous Positioning, Indoor Navigation and Location Based Services (UPINLBS), Shanghai, China, 3–4 November 2016. [Google Scholar] [CrossRef]
- Li, M.; Zhu, H.; You, S.; Tang, C.; Li, Y. Efficient laser-based 3D SLAM in real time for coal mine rescue robots. In Proceedings of the 2018 IEEE 8th Annual International Conference on CYBER Technology in Automation, Control, and Intelligent Systems (CYBER), Tianjin, China, 19–23 July 2018. [Google Scholar] [CrossRef]
- Yang, L.; Ma, H.; Wang, Y.; Wang, C.; Zhang, Z. Research on method of simultaneous localization and mapping of coal mine inspection robot. Ind. Mine Autom. 2019, 45, 18–24. [Google Scholar]
- Yang, J.; Wang, C.; Zhang, Q.; Chang, B.; Wang, F.; Wang, X.; Wu, M. Modeling of Laneway Environment and Locating Method of Roadheader Based on Self-Coupling and Hector SLAM. In Proceedings of the 2020 5th International Conference on Electromechanical Control Technology and Transportation (ICECTT), Nanchang, China, 15–17 May 2020. [Google Scholar] [CrossRef]
- Cowley, A.; Miller, I.D.; Taylor, C.J. UPSLAM: Union of panoramas SLAM. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021. [Google Scholar] [CrossRef]
- Xu, J.; Huang, Y.; Zhao, R.; Liu, Y.; Li, H. Probabilistic Membrane Computing-Based SLAM for Patrol UAVs in Coal Mines. J. Sens. 2021, 2021, 7610126. [Google Scholar] [CrossRef]
- Ren, Z.; Wang, L.; Bi, L. Robust GICP-based 3D LiDAR SLAM for underground mining environment. Sensors 2019, 19, 2915. [Google Scholar] [CrossRef] [PubMed]
- Ren, Z.; Wang, L. Accurate Real-Time Localization Estimation in Underground Mine Environments Based on a Distance-Weight Map (DWM). Sensors 2022, 22, 1463. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.; Singh, S. LOAM: Lidar odometry and mapping in real-time. In Proceedings of the Robotics: Science and Systems, wheeler hall, Berkeley, CA, USA, 12–16 July 2014. [Google Scholar] [CrossRef]
- Zhang, J.; Singh, S. Low-drift and real-time lidar odometry and mapping. Auton. Robot. 2017, 41, 401–416. [Google Scholar] [CrossRef]
- Salti, S.; Tombari, F.; di Stefano, L. SHOT: Unique signatures of histograms for surface and texture description. Comput. Vis. Image Underst. 2014, 125, 251–264. [Google Scholar] [CrossRef]
- Guo, J.; Borges, P.V.K.; Park, C.; Gawel, A. Local descriptor for robust place recognition using lidar intensity. IEEE Robot. Autom. Lett. 2019, 4, 1470–1477. [Google Scholar] [CrossRef]
- Guo, Y.; Bennamoun, M.; Sohel, F.A.; Lu, M.; Wan, J.; Kwok, N.M. A comprehensive performance evaluation of 3D local feature descriptors. Int. J. Comput. Vis. 2016, 116, 66–89. [Google Scholar] [CrossRef]
- Rizzini, D.L. Place recognition of 3D landmarks based on geometric relations. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017. [Google Scholar] [CrossRef]
- Scan Context: Egocentric Spatial Descriptor for Place Recognition Within 3D Point Cloud Map. In Proceedings of the International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018. [CrossRef]
- Wang, Y.; Sun, Z.; Xu, C.-Z.; Sarma, S.E.; Yang, J.; Kong, H. Lidar iris for loop-closure detection. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, CA, US, 24–30 October 2020. [Google Scholar] [CrossRef]
- Dubé, R.; Dugas, D.; Stumm, E.; Nieto, J.; Siegwart, R.; Cadena, C. Segmatch: Segment based place recognition in 3d point clouds. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017. [Google Scholar] [CrossRef]
- Douillard, B.; Quadros, A.; Morton, P.; Underwood, J.P.; de Deuge, M.; Hugosson, S.; Hallström, M.; Bailey, T. Scan segments matching for pairwise 3D alignment. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, St Paul, MN, USA, 14–18 May 2012. [Google Scholar] [CrossRef]
- Nieto, J.; Bailey, T.; Nebot, E. Scan-SLAM: Combining EKF-SLAM and scan correlation. In Proceedings of the Field and Service Robotics, QLD, Australia, 29–31 July 2005. [Google Scholar] [CrossRef]
- Li, Y.; Su, P.; Cao, M.; Chen, H.; Jiang, X.; Liu, Y. Semantic Scan Context: Global Semantic Descriptor for LiDAR-based Place Recognition. In Proceedings of the 2021 IEEE International Conference on Real-time Computing and Robotics (RCAR), Xining, China, 15–19 July 2021. [Google Scholar] [CrossRef]
- Zhou, Y.; Wang, Y.; Poiesi, F.; Qin, Q.; Wan, Y. Loop closure detection using local 3D deep descriptors. IEEE Robot. Autom. Lett. 2021, 7, 6335–6342. [Google Scholar] [CrossRef]
- Ma, J.; Zhang, J.; Xu, J.; Ai, R.; Gu, W.; Chen, X. Overlap Transformer: An Efficient and Yaw-Angle-Invariant Transformer Network for LiDAR-Based Place Recognition. IEEE Robot. Autom. Lett. 2022, 7, 6958–6965. [Google Scholar] [CrossRef]
- Shan, T.; Englot, B. LeGO-LOAM: Lightweight and Ground-Optimized Lidar Odometry and Mapping on Variable Terrain. In Proceedings of the International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018. [Google Scholar] [CrossRef]
- Ji, X.; Zuo, L.; Zhang, C.; Liu, Y. Lloam: Lidar odometry and mapping with loop-closure detection based correction. In Proceedings of the International Conference on Mechatronics and Automation (ICMA), Tianjin, China, 4–8 August 2019. [Google Scholar] [CrossRef]
- Meng, Z.; Wang, C.; Han, Z.; Ma, Z. Research on 3d Laser Navigation of Mobile Robot Based on Segmentation Matching and SLAM. In Proceedings of the 2020 5th International Conference on Automation, Control and Robotics Engineering (CACRE), Shenyang University of Technology, Shenyang, China, 19–20 September 2020. [Google Scholar] [CrossRef]
- Xue, G.; Wei, J.; Li, R.; Cheng, J. LeGO-LOAM-SC: An Improved Simultaneous Localization and Mapping Method Fusing LeGO-LOAM and Scan Context for Underground Coalmine. Sensors 2022, 22, 520. [Google Scholar] [CrossRef]
- Hornung, A.; Wurm, K.M.; Bennewitz, M.; Stachniss, C.; Burgard, W. OctoMap: An efficient probabilistic 3D mapping framework based on octrees. Auton. Robot. 2013, 34, 189–206. [Google Scholar] [CrossRef]
- Geiger, A.; Lenz, P.; Urtasun, R. Are we ready for autonomous driving? the kitti vision benchmark suite. In Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition, Providence, RI, USA, 16–21 June 2012. [Google Scholar]
- Zermas, D.; Izzat, I.; Papanikolopoulos, N. Fast segmentation of 3d point clouds: A paradigm on lidar data for autonomous vehicle applications. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017. [Google Scholar] [CrossRef]
- Zhang, Z.; Wang, D.; Liu, N.; Feng, X.; Geng, N.; Hu, S. Research on the preprocessing method of blade point cloud based on structured light on-machine measurement. Chin. J. Sci. Instrum. 2020, 41, 55–66. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Evaluation Indicators | LeGO-LOAM | LeGO-LOAM-SM | Improvement (%) |
|---|---|---|---|
| Trajectory length/m | 3733.44 | 3719.69 | / |
| Deviation 1/m | 9.25 | 4.50 | 51.4% |
| LeGO-LOAM | LeGO-LOAM-SM | |||
|---|---|---|---|---|
| ATE/m | RPE | ATE/m | RPE | |
| Maximum error | 11.11 | 6.174 | 5.67 | 2.312 |
| Minimum error | 1.16 | 0.005 | 0.20 | 0.005 |
| Average error | 5.37 | 0.061 | 2.04 | 0.060 |
| Standard deviation | 2.74 | 0.146 | 1.04 | 0.055 |
| Mean square error | 6.03 | 0.159 | 2.21 | 0.084 |
| Scene 1 | Scene 2 | |||
|---|---|---|---|---|
| LeGO-LOAM | LeGO-LOAM-SM | LeGO-LOAM | LeGO-LOAM-SM | |
| Panning X/m | −0.75 | 0.15 | 0.76 | 0.47 |
| Panning Y/m | 0.15 | 0.06 | 0.20 | −0.21 |
| Panning Z/m | 13.89 | 12.42 | 7.49 | 6.52 |
| Total panning/m | 13.91 | 12.42 | 7.53 | 6.54 |
| Pitch angle/deg | −2.35 | 0.92 | 10.28 | 9.92 |
| Declination angle/deg | 0.64 | −6.25 | 8.03 | 7.68 |
| Rolling angle/deg | 6.31 | −0.61 | 1.02 | 0.99 |
| Total rotation/deg | 6.76 | 6.35 | 13.08 | 12.58 |
| Measurement Size/m | Estimated Size/m | |||
|---|---|---|---|---|
| Length | Width | Length | Width | |
| Simulation scenario | 46.803 | 1.822 | 46.81 | 1.82 |
| Obstacle A | 0.765 | 0.411 | 0.77 | 0.42 |
| Obstacle B | 0.567 | 0.378 | 0.56 | 0.37 |
| Obstacle C | 0.688 | 0.210 | 0.68 | 0.22 |
| 3D Point Cloud Map/Mb | 3D Octo-Map/Kb | 2D Occupancy Grid Map/Kb | |
|---|---|---|---|
| Scene 1 | 24.3 | 62.3 | 16.3 |
| Scene 2 | 35.6 | 73.8 | 26.7 |
| Scene 3 | 17.8 | 54.5 | 13.4 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xue, G.; Li, R.; Liu, S.; Wei, J. Research on Underground Coal Mine Map Construction Method Based on LeGO-LOAM Improved Algorithm. Energies 2022, 15, 6256. https://doi.org/10.3390/en15176256
Xue G, Li R, Liu S, Wei J. Research on Underground Coal Mine Map Construction Method Based on LeGO-LOAM Improved Algorithm. Energies. 2022; 15(17):6256. https://doi.org/10.3390/en15176256
Chicago/Turabian StyleXue, Guanghui, Ruixue Li, Shuang Liu, and Jinbo Wei. 2022. "Research on Underground Coal Mine Map Construction Method Based on LeGO-LOAM Improved Algorithm" Energies 15, no. 17: 6256. https://doi.org/10.3390/en15176256
APA StyleXue, G., Li, R., Liu, S., & Wei, J. (2022). Research on Underground Coal Mine Map Construction Method Based on LeGO-LOAM Improved Algorithm. Energies, 15(17), 6256. https://doi.org/10.3390/en15176256