
A Theoretical Approach for Resonance Analysis of Wind Turbines under 1P/3P Loads


Abstract
:1. Introduction
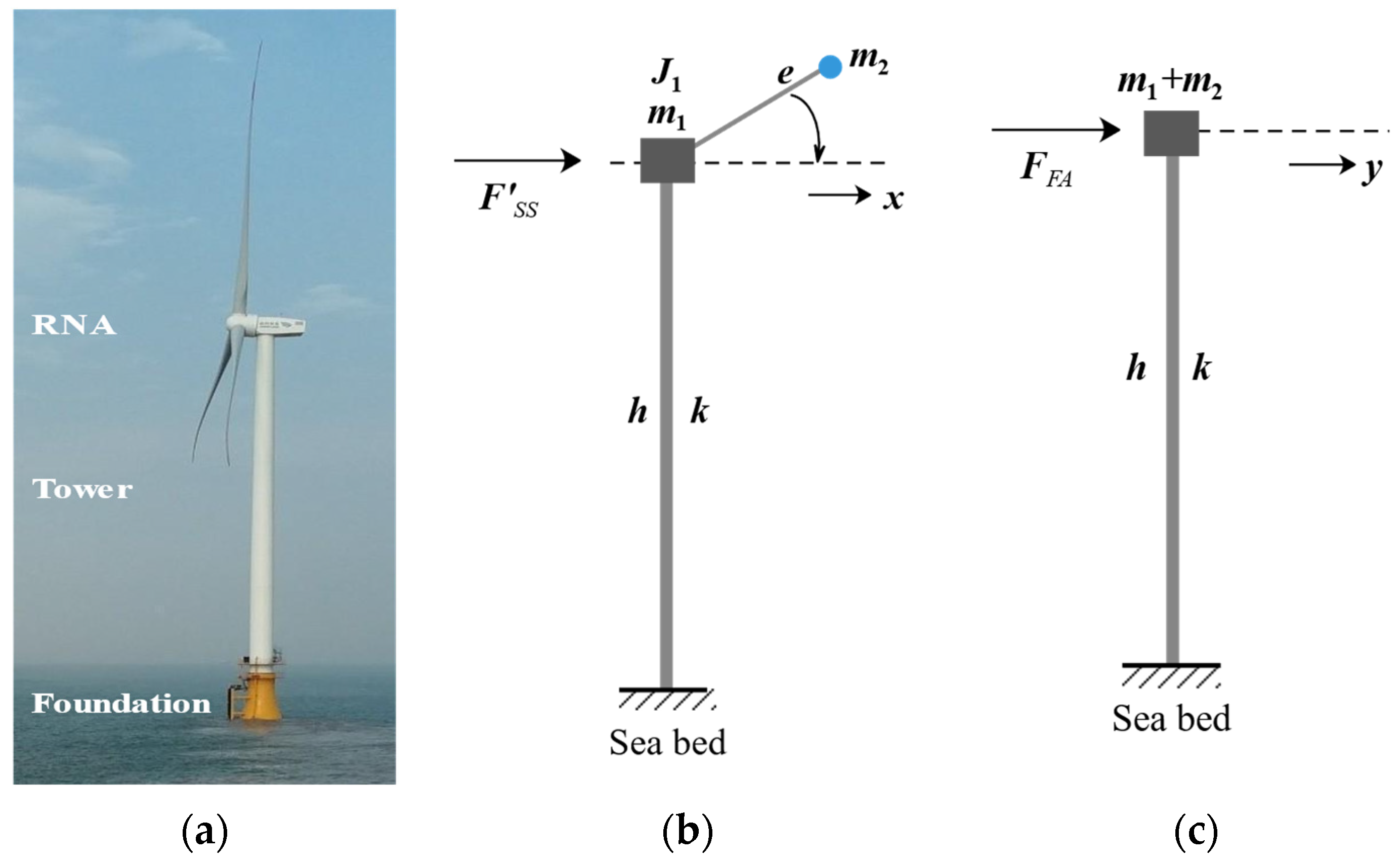
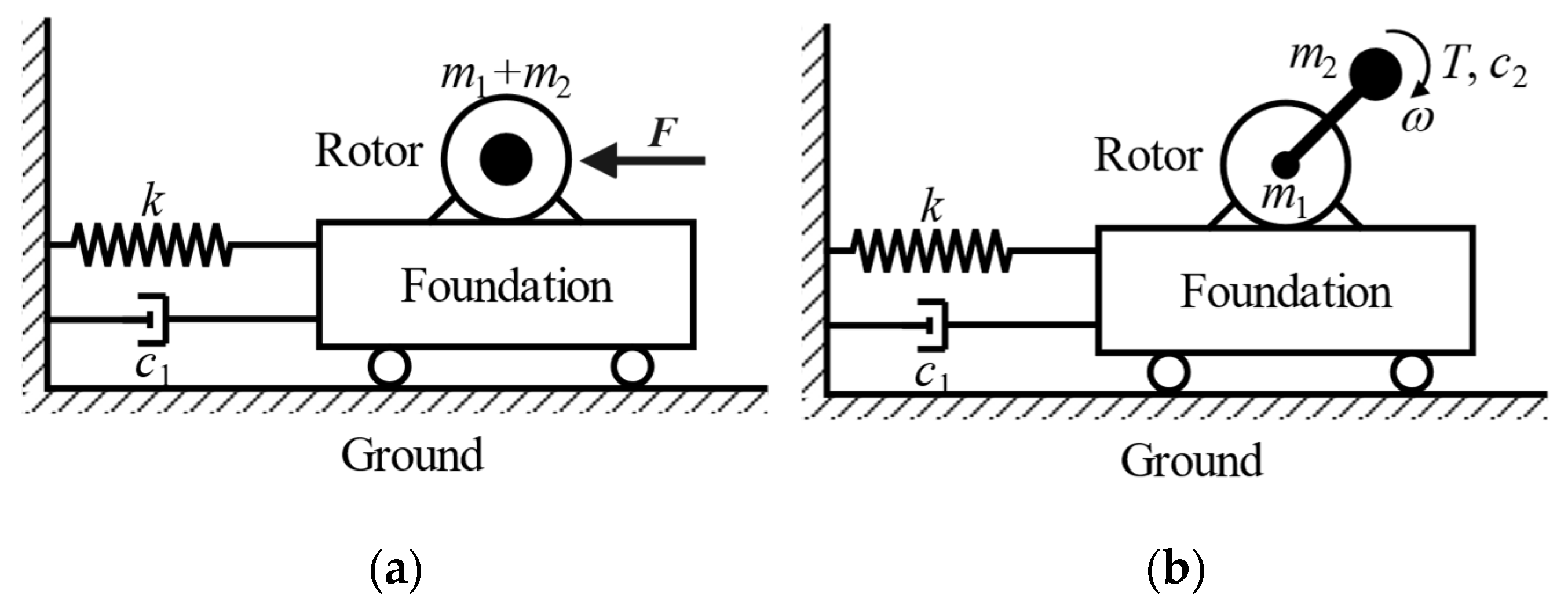
2. Theoretical Model of a WT
3. Influence Analysis of Different Parameters
3.1. Parameters Prepared for Calculation
3.2. Influences of b and c
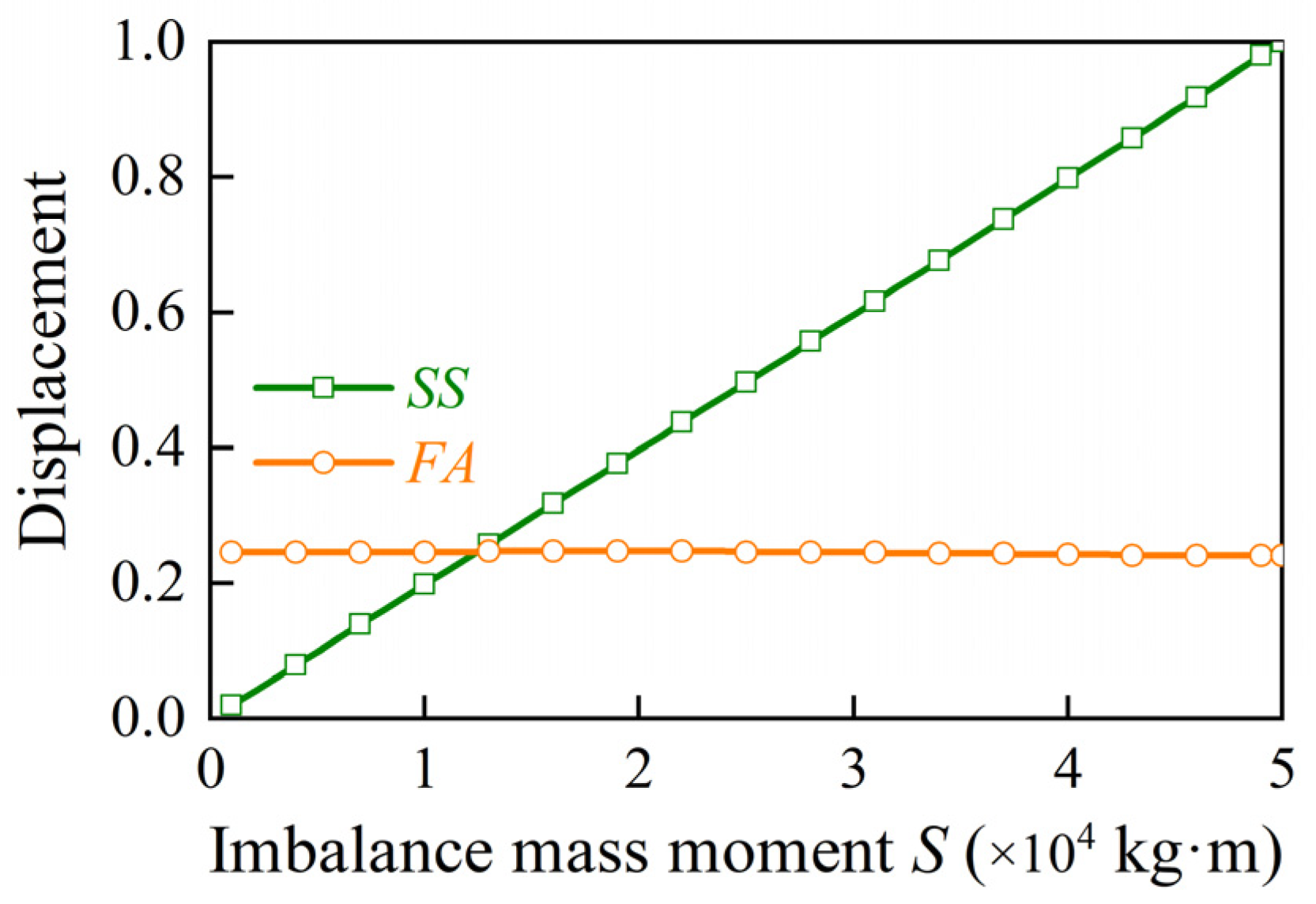
3.3. Influence of S and F
3.4. Influence of Torque T
4. Resonance Phenomenon
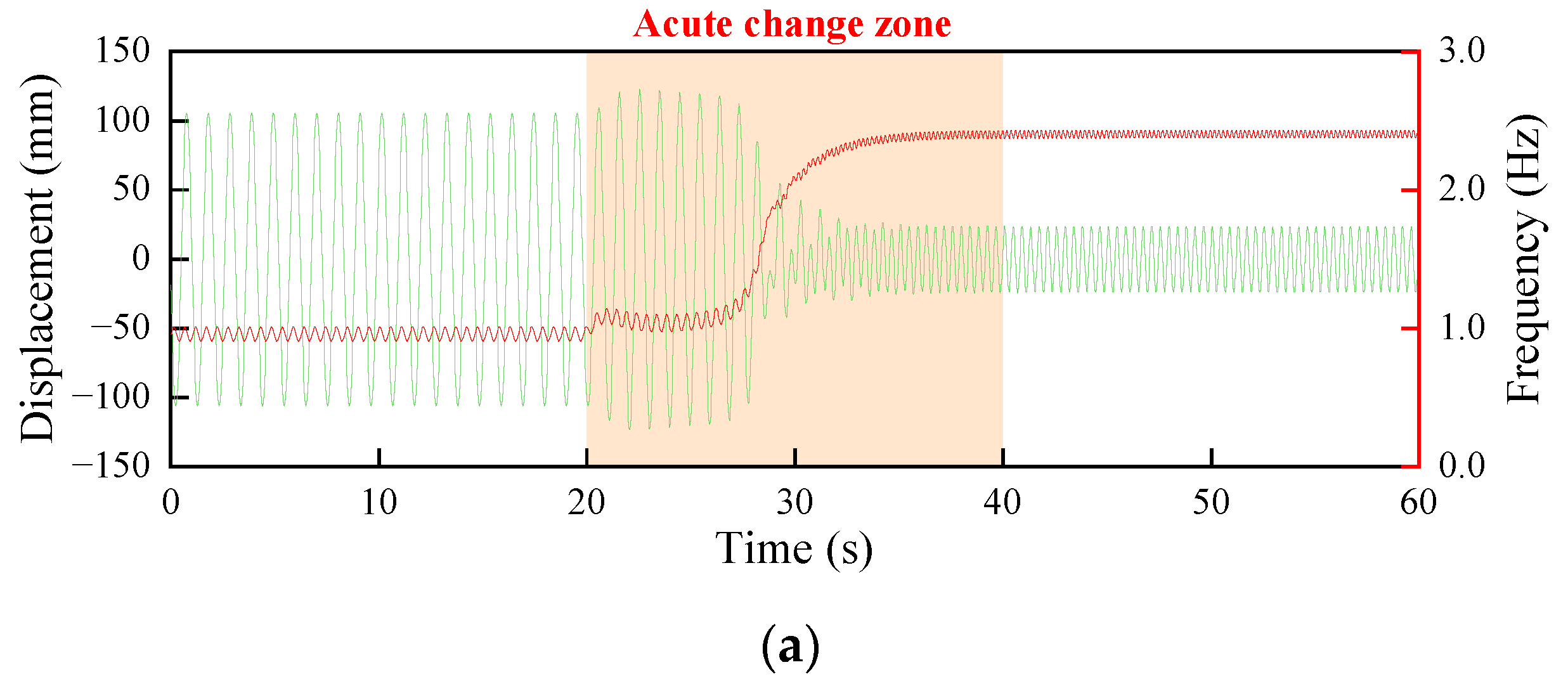
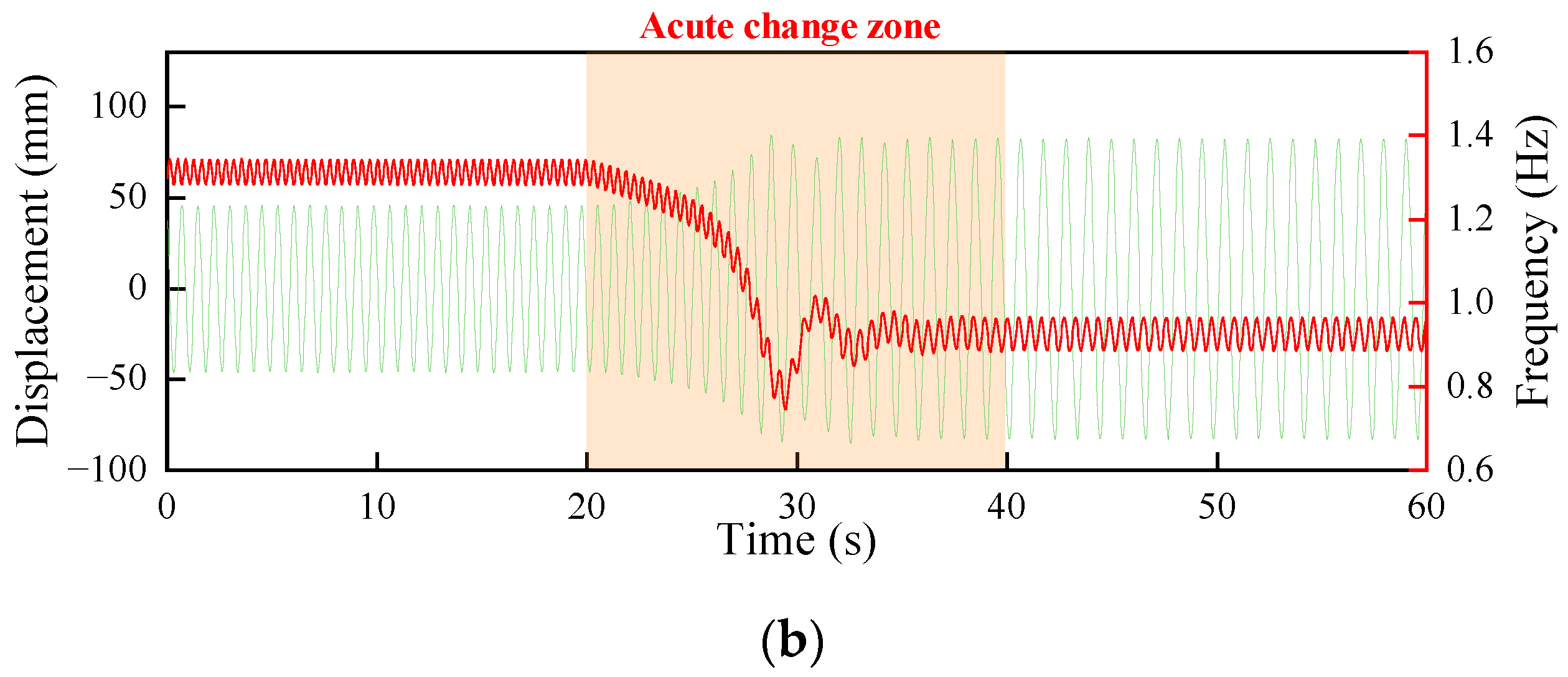
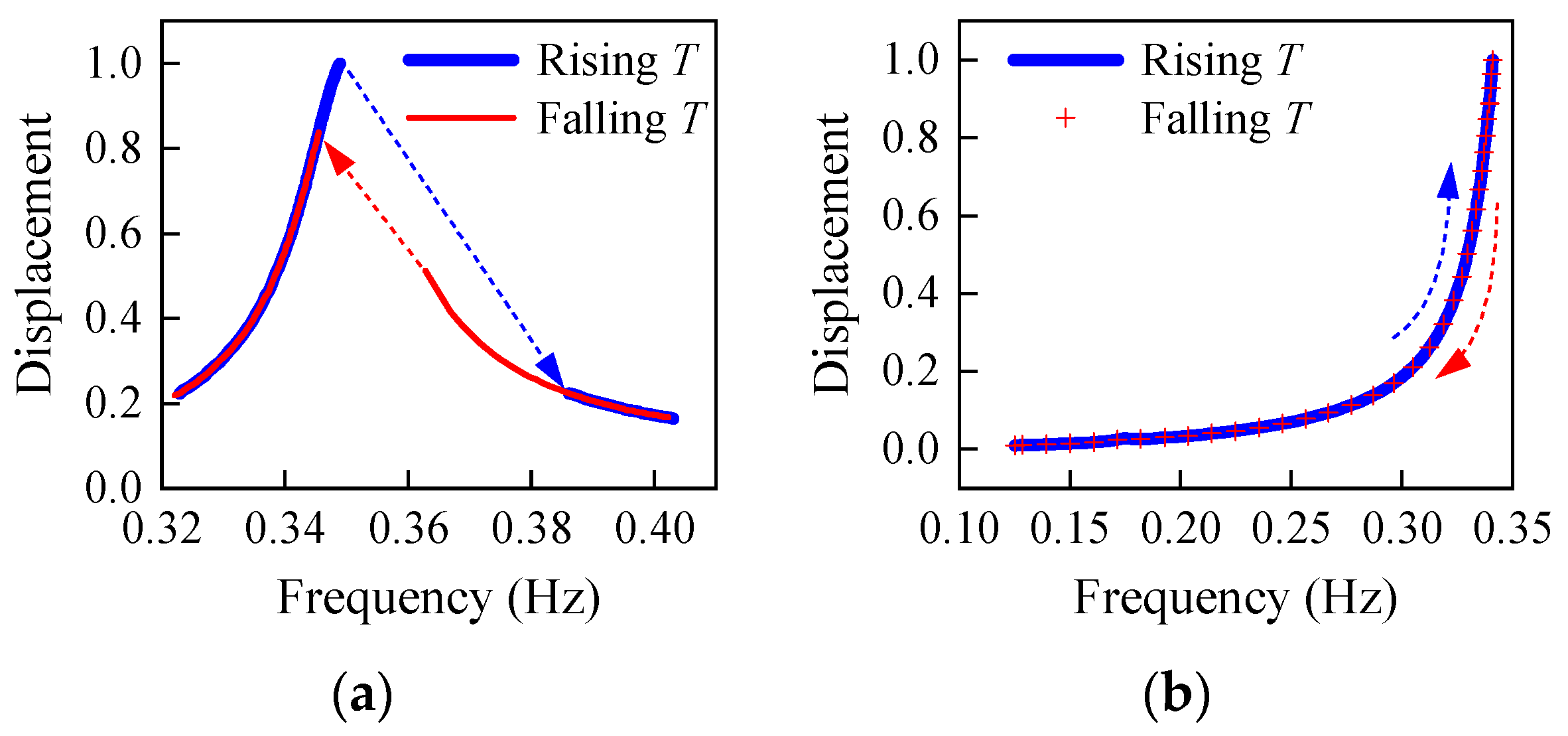
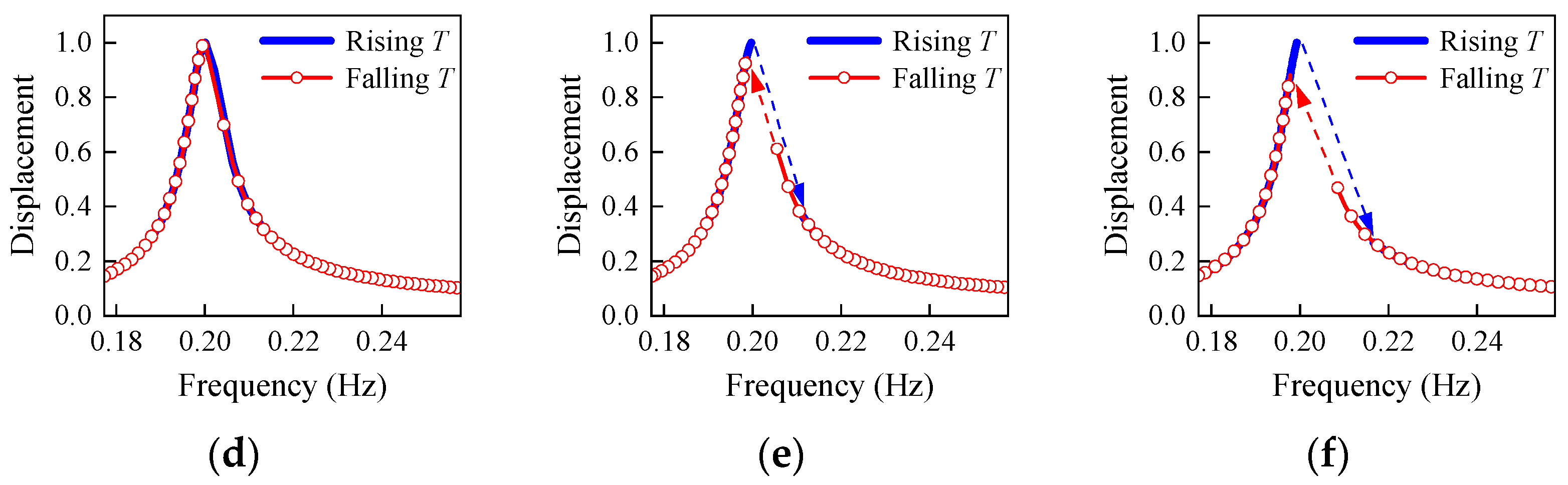
4.1. The Sommerfeld Effect
- The rotor speed will ‘jump’ when passing the natural frequency, resulting in a sudden increase or decrease in the vibration response;
- The jump phenomenon transits along different paths when the external energy supply rises or falls.
4.2. The Sommerfeld Effect of WT Structure
4.2.1. FA Direction
4.2.2. SS Direction of Soft–Stiff WT System
4.2.3. SS Direction for Soft WT Systems
4.2.4. 3P Resonance of WT Structure
5. Discussion
6. Conclusions
- (1)
- The model is built in the SS and FA directions separately because the mass imbalance is in the SS direction, and it is simulated by an eccentric mass point to generate a 1P load;
- (2)
- The structural damping has little effect on vibration, the imbalance mass moment and 3P load controls the response in the SS direction and the FA direction separately, and they have no impact on the response of the other direction. Torque is the source of rotational speed;
- (3)
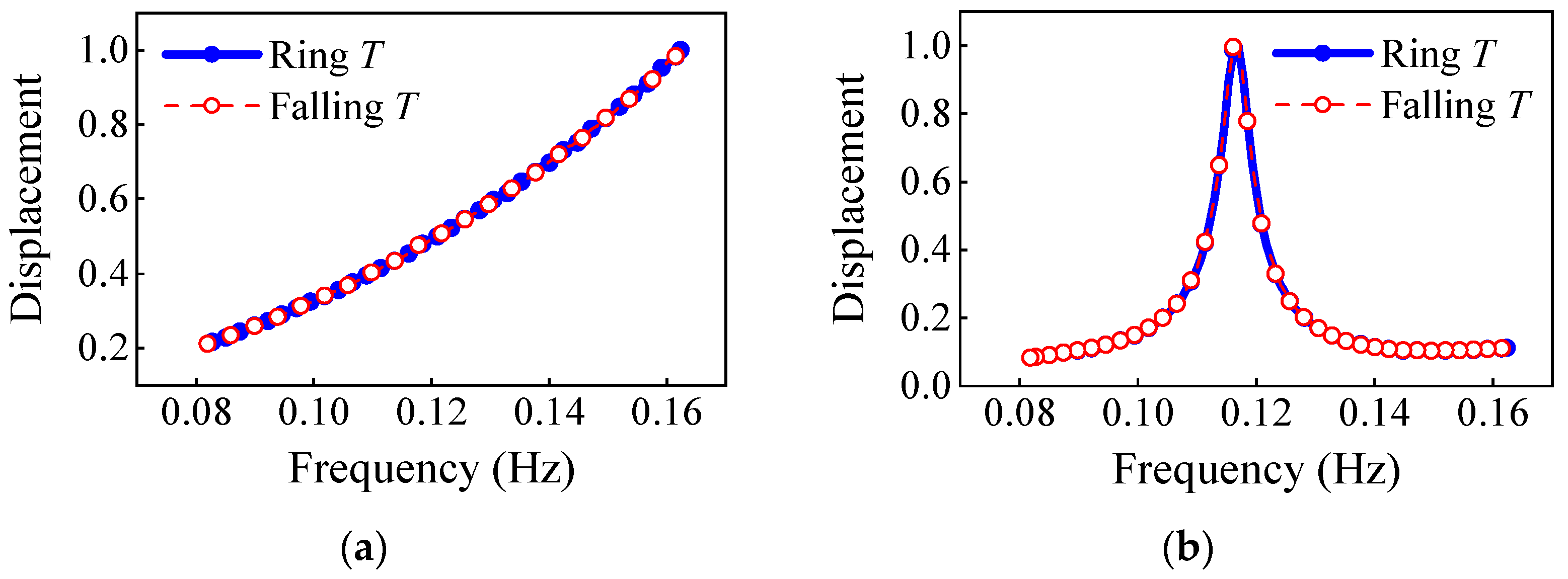
- The vibration behavior of a rotating eccentric mass passing the natural frequency of the system is the so-called Sommerfeld Effect, which has two significant characteristics compared to common resonance phenomena. The first is that the rotation speed and response of the structure will jump when passing the natural frequency. Secondly, the jump phenomenon transits along different paths when the rotation speed rises or falls;
- (4)
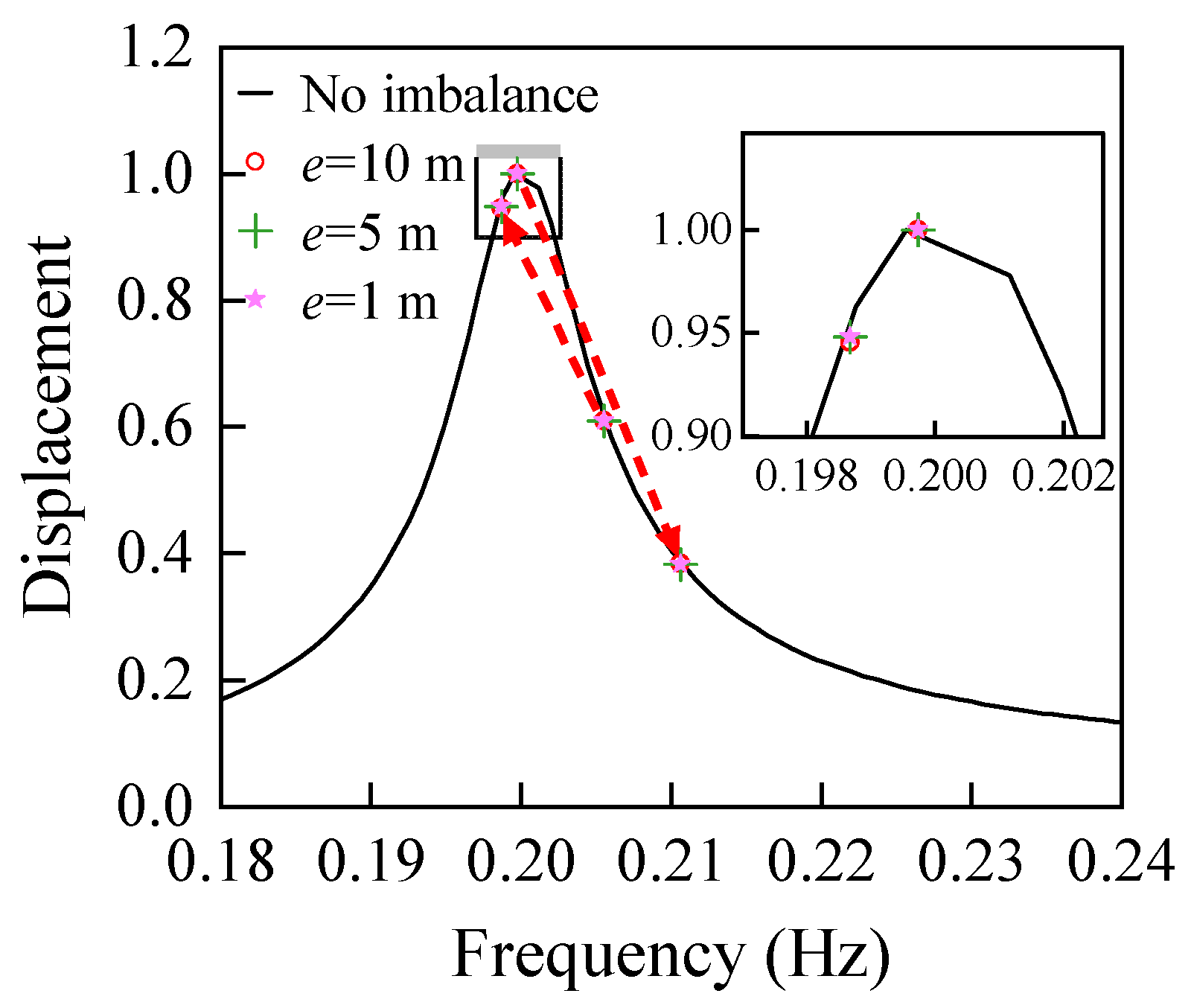
- The Sommerfeld Effect does not exist in soft–stiff WTs because there is no rotating imbalance mass in the FA direction and the rotational frequency does not pass the natural frequency in the SS direction. This is a new understanding different from that of existing research;
- (5)
- For soft WTs, only if the imbalance reaches a much higher value (19,200 kg·m in this study) should the Sommerfeld Effect be considered; otherwise, it could be ignored;
- (6)
- The 3P resonance happens when the 3P frequency passes the natural frequency, which can amplify the response of the structure, but it does not meet the characteristics of the Sommerfeld Effect; therefore, it is not the Sommerfeld Effect.
Author Contributions
Funding
Conflicts of Interest
References
- Global Wind Report. 2022. Available online: https://gwec.net/global-wind-report-2022/ (accessed on 2 April 2022).
- Lian, J.J.; Cai, O.; Dong, X.F.; Jiang, Q.; Zhao, Y. Health Monitoring and Safety Evaluation of the Offshore Wind Turbine Structure: A Review and Discussion of Future Development. Sustainability 2019, 11, 494. [Google Scholar] [CrossRef] [Green Version]
- Niebsch, J.; Ramlau, R.; Nguyen, T.T. Mass and Aerodynamic Imbalance Estimates of Wind Turbines. Energies 2010, 3, 696–710. [Google Scholar] [CrossRef] [Green Version]
- Tang, Q.Q.; Liu, H.M.; Ren, Q.Y.; Zhang, Z.K.; Chi, Y.N. Individual Pitch Control Strategy of Wind Turbine to Reduce 1P Aerodynamic Load and 3P Aerodynamic Torque Ripples. Acta Energ. Sol. Sin. 2018, 39, 2453–2461. [Google Scholar] [CrossRef]
- Bhattacharya, S. Design of Foundations for Offshore Wind Turbines, 1st ed.; John Wiley & Sons: Hoboken, NJ, USA, 2019; pp. 51–52. [Google Scholar]
- Thiringer, T.; Dahlberg, J. Periodic Pulsations from a Three-Bladed Wind Turbine. IEEE Trans. Energy Convers. 2001, 16, 128–133. [Google Scholar] [CrossRef]
- Bossanyi, E. Individual Blade Pitch Control for Load Reduction. Wind Energy 2003, 6, 119–128. [Google Scholar] [CrossRef]
- Bossanyi, E.; Fleming, P.; Wright, A. Validation of Individual Pitch Control by Field Tests on Two and Three-Bladed Wind Turbines. IEEE Trans. Control Syst. Technol. 2013, 21, 1067–1078. [Google Scholar] [CrossRef]
- Petrovic, V.; Jelavic, M.; Baotic, M. Advanced Control Algorithms for Reduction of Wind Turbine Structural Loads. Renew. Energy 2015, 76, 418–431. [Google Scholar] [CrossRef]
- Nayfeh, A.; Mook, D. Nonlinear Oscillations, 1st ed.; John Wiley & Sons: Hoboken, NJ, USA, 1995; pp. 224–227. [Google Scholar]
- Blekhman, I.I. Vibrational Mechanics: Nonlinear Dynamic Effects, General Approach, Applications, 1st ed.; World Scientific: Singapore, 1999; pp. 158–161. [Google Scholar]
- Fidlin, A. Nonlinear Oscillations in Mechanical Engineering, 1st ed.; Springer: Berlin, Germany, 2006; pp. 193–194. [Google Scholar]
- Brasil, R.; Feitosa, L.; Balthazar, J. A Nonlinear and Non-ideal Wind Generator Supporting Structure. Appl. Mech. Mater. 2006, 5–6, 433–442. [Google Scholar] [CrossRef]
- Hu, W.H.; Thons, S.; Rohrmann, R.G.; Said, S.; Rucker, W. Vibration-based Structural Health Monitoring of a Wind Turbine System. Part I: Resonance Phenomenon. Eng. Struct. 2015, 89, 260–272. [Google Scholar] [CrossRef]
- Zhao, Y.; Pan, J.N.; Wang, Z.Y. Analysis of Wind Turbine Vibration Characteristics during Startup and Shutdown Process. J. Hunan Univ. (Nat. Sci.) 2019, 16, 82–89. [Google Scholar] [CrossRef]
- Li, Z.W.; Wen, B.R.; Dong, X.J.; Peng, Z.K. Aerodynamic and Aeroelastic Characteristics of Flexible Wind Turbine Blades Under Periodic Unsteady Inflows. J. Wind Eng. Ind. Aerodyn. 2020, 197, 104057. [Google Scholar] [CrossRef]
- Lian, J.J.; Sun, L.Q.; Zhang, J.F.; Wang, H.J. Bearing Capacity and Technical Advantages of Composite Bucket Foundation of Offshore Wind Turbines. Trans. Tianjin Univ. 2011, 17, 132–137. [Google Scholar] [CrossRef]
- Ding, H.Y.; Lian, J.J.; Li, A.D.; Zhang, P.Y. One-step-installation of Offshore Wind Turbine on Large-scale Bucket-top-bearing Bucket Foundation. Trans. Tianjin Univ. 2013, 19, 188–194. [Google Scholar] [CrossRef]
- Samantaray, A.K.; Dasgupta, S.S.; Bhattacharyya, R. Sommerfeld Effect in Rotationally Symmetric Planar Dynamical Systems. Int. J. Eng. Sci. 2010, 48, 21–36. [Google Scholar] [CrossRef]
- Kovriguine, D.A. Synchronization and Sommerfeld Effect as Typical Resonant Patterns. Arch. Appl. Mech. 2012, 82, 591–604. [Google Scholar] [CrossRef]
- Sinha, A.; Bharti, S.K.; Samantaray, A.K.; Chakraborty, G.; Bhattacharyya, R. Sommerfeld Effect in an Oscillator with a Reciprocating Mass. Nonlinear Dyn. 2018, 93, 1719–1739. [Google Scholar] [CrossRef]
- Wang, Y.P.; Shi, W.; Michailides, C.; Wan, L.; Kim, H.; Li, X. WEC Shape Effect on the Motion Response and Power Performance of a Combined Wind-wave Energy Converter. Ocean Eng. 2022, 250, 111038. [Google Scholar] [CrossRef]
- Ren, Y.J.; Vengatesan, V.; Shi, W. Dynamic Analysis of a Multi-column TLP Floating Offshore Wind Turbine with Tendon Failure Scenarios. Ocean Eng. 2022, 245, 110472. [Google Scholar] [CrossRef]
- Det Norske Veritas; Risø National Laboratory. Guidelines for Design of Wind Turbines, 2nd ed.; Jydsk Centraltrykkeri: Copenhagen, Denmark, 2002. [Google Scholar]
- Standardization Administration of the People’s Republic of China. Wind Turbine Generator Systems Design Requirements (JB/T 10300-2001); Standards Press of China: Beijing, China, 2001. [Google Scholar]
- Licari, J.; Ekanayake, J.B.; Jenkins, N. Investigation of a Speed Exclusion Zone to Prevent Tower Resonance in Variable-Speed Wind Turbines. IEEE Trans. Sustain. Energy 2013, 4, 977–984. [Google Scholar] [CrossRef]
- Hu, W.H.; Tang, D.H.; Wang, M.; Liu, J.L.; Li, Z.H.; Lu, W.; Teng, J.; Said, S.; Rohrmann, R.G. Resonance Monitoring of a Horizontal Wind Turbine by Strain-Based Automated Operational Modal Analysis. Energies 2020, 13, 579. [Google Scholar] [CrossRef] [Green Version]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| M (kg) | 1.920 × 105 | b (N·m·s) | 4.457 × 105 |
| k (N/m) | 9.285 × 105 | c (N·s/m) | 1.689 × 104 |
| J (kg·m2) | 2 × 107 | T (N·m) | 3.5 × 105~1.12 × 106 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lian, J.; Zhou, H.; Dong, X. A Theoretical Approach for Resonance Analysis of Wind Turbines under 1P/3P Loads. Energies 2022, 15, 5787. https://doi.org/10.3390/en15165787
Lian J, Zhou H, Dong X. A Theoretical Approach for Resonance Analysis of Wind Turbines under 1P/3P Loads. Energies. 2022; 15(16):5787. https://doi.org/10.3390/en15165787
Chicago/Turabian StyleLian, Jijian, Huan Zhou, and Xiaofeng Dong. 2022. "A Theoretical Approach for Resonance Analysis of Wind Turbines under 1P/3P Loads" Energies 15, no. 16: 5787. https://doi.org/10.3390/en15165787
APA StyleLian, J., Zhou, H., & Dong, X. (2022). A Theoretical Approach for Resonance Analysis of Wind Turbines under 1P/3P Loads. Energies, 15(16), 5787. https://doi.org/10.3390/en15165787