
Tracking and Rejection of Biased Sinusoidal Signals Using Generalized Predictive Controller

 ,
,  , , , , , and
, , , , , and
Abstract
:1. Introduction
2. Proposed GPC Approach
2.1. Preliminaries
2.2. Proposed Augmented Model
2.3. Predictive Control Law through GPC
3. Tracking/Rejecting Capability of the Proposed Controller
Application of the Proposed Approach for MIMO Plants
4. Results
- Test 1: tracking of biased sinusoidal references with zero perturbation.
- Test 2: rejection of biased sinusoidal perturbation with a constant reference.
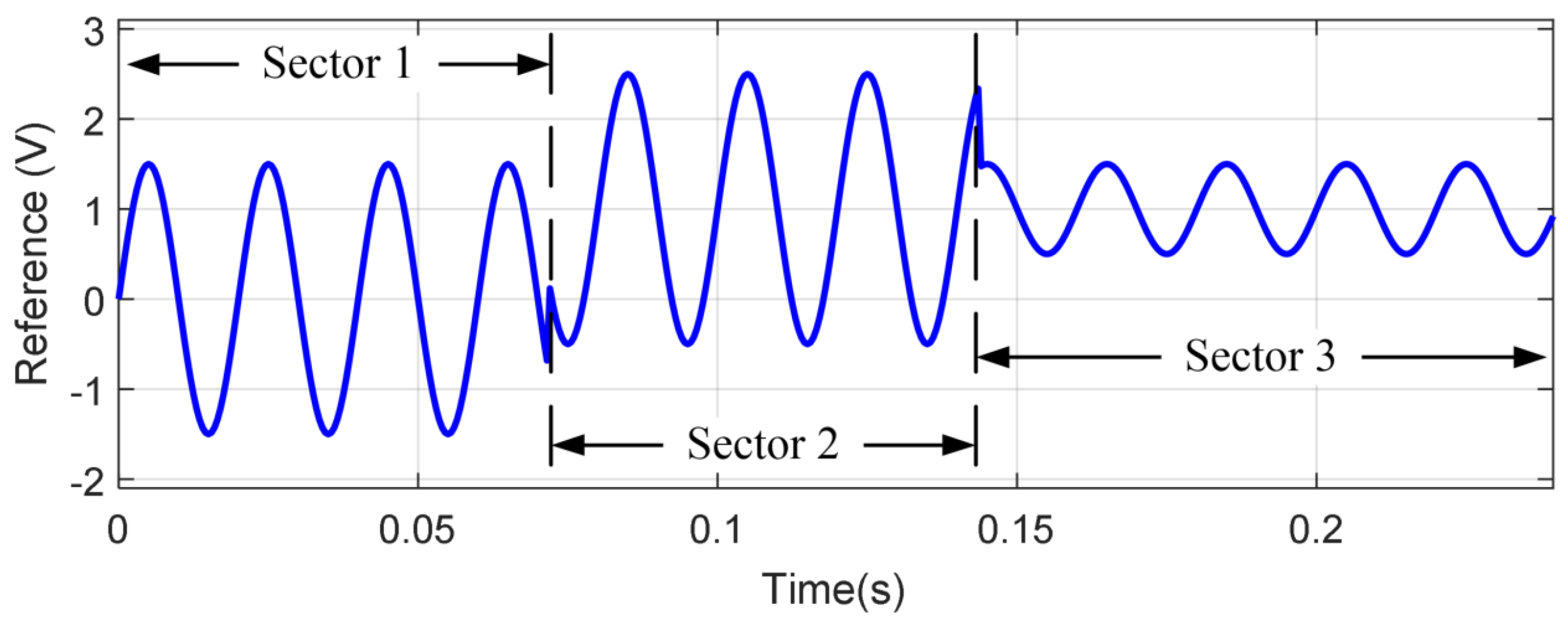
4.1. Test 1: Tracking of Biased Sinusoidal References
- Sector 1: bias (b) = 0 V, amplitude () = 1.5 V, (50 Hz).
- Sector 2: bias (b) = 1 V, amplitude () = 1.5 V, (50 Hz).
- Sector 3: bias (b) = 1 V, amplitude () = 0.5 V, (50 Hz).
4.2. Test 2: Rejection of Biased Sinusoidal Disturbance
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| DC | Direct Current signal |
| DSP | Digital Signal Processor |
| GPC | Generalized Predictive Control |
| IMP | Internal Model Principle |
| PI | Proportional Integral Controller |
| RMSE | Root Mean Square Error |
| SISO | Single Input, Single Output |
| MIMO | Multiple Input, Multiple Output |
| Angular frequency (rad/s) | |
| Discrete-time angular frequency (rad/sample) | |
| Sinusoidal amplitude | |
| b | Sinusoidal bias |
| i | Discrete instant of time |
| t | Continuous time |
| J | Cost function |
References
- Kamaldar, M.; Hoagg, J.B. Adaptive Harmonic Control for Rejection of Sinusoidal Disturbances Acting on an Unknown System. IEEE Trans. Control Syst. Technol. 2020, 28, 277–290. [Google Scholar] [CrossRef]
- Zhou, S.; Shi, J. Active Balancing and Vibration Control of Rotating Machinery: A Survey. Shock Vibrat. Dig. 2001, 33, 361–371. [Google Scholar] [CrossRef] [Green Version]
- Esbrook, A.; Tan, X.; Khalil, H.K. An Indirect Adaptive Servocompensator for Signals of Unknown Frequencies with Application to Nanopositioning. Automatica 2013, 49, 2006–2016. [Google Scholar] [CrossRef]
- Hong, F.; Du, C.; Tee, K.P.; Ge, S.S. Adaptive Disturbance Rejection in the Presence of Uncertain Resonance Mode in Hard Disk Drives. IEEE Trans. Inst. Meas. Control. 2010, 32, 99–119. [Google Scholar] [CrossRef] [Green Version]
- Kim, W.; Moon, J. Adaptive Nonlinear Output Tracking Control With Rejection of Unmatched Biased Sinusoidal Disturbances for Nonlinear Systems. IEEE Access 2020, 8, 216210–216218. [Google Scholar] [CrossRef]
- Kim, W.; Shin, D.; Won, D.; Chung, C.C. Disturbance-Observer-Based Position Tracking Controller in the Presence of Biased Sinusoidal Disturbance for Electrohydraulic Actuators. IEEE Trans. Control Syst. Technol. 2013, 21, 2290–2298. [Google Scholar] [CrossRef]
- Ji, W.; Tian, B.; Zong, Q.; Chen, Y. PID Controller Design Based on BPNN for Helicopter Vibration Attenuation. In Proceedings of the 40th Chinese Control Conference (CCC 2021), Shanghai, China, 26–28 July 2021; pp. 2045–2050. [Google Scholar]
- Meng, Y.; Fang, S.; Pan, Z.; Qin, L. A New Hybrid-Excited Doubly Salient Dual-PM Machine with DC-biased Sinusoidal Current. IEEE Trans. Appl. Supercond. 2021, 31, 1–5. [Google Scholar] [CrossRef]
- Du, Y.; Mao, Y.; Xiao, F.; Zhu, X.; Quan, L.; Li, F. Partitioned Stator Hybrid Excited Machine With DC-Biased Sinusoidal Current. IEEE Trans. Ind. Electron. 2022, 69, 236–248. [Google Scholar] [CrossRef]
- Li, A.; Gao, Z.; Jiang, D.; Kong, W.; Jia, S.; Qu, R. Three-phase four-leg drive for DC-biased sinusoidal current vernier reluctance machine. In Proceedings of the 2018 IEEE Applied Power Electronics Conference and Exposition (APEC), San Antonio, TX, USA, 4–8 March 2018; pp. 1236–1241. [Google Scholar]
- Jia, S.; Qu, R.; Kong, W.; Li, D.; Li, J.; Yu, Z.; Fang, H. Hybrid Excitation Stator PM Vernier Machines With Novel DC-Biased Sinusoidal Armature Current. IEEE Trans. Ind. Appl. 2018, 54, 1339–1348. [Google Scholar] [CrossRef]
- Kong, W.; Jiang, D.; Qu, R.; Yu, Z.; Jia, S.; Jing, L. Drive for DC-biased sinusoidal current vernier reluctance motors with reduced power electronics devices. In Proceedings of the IEEE International Electric Machines and Drives Conference (IEMDC 2017), Miami, FL, USA, 21–24 May 2017; pp. 1–6. [Google Scholar]
- Xu, S.; Chang, L.; Shao, R. Single-Phase Voltage Source Inverter With Voltage Boosting and Power Decoupling Capabilities. IEEE Trans. Emerg. Sel. Topics Power Electron. 2020, 8, 2977–2988. [Google Scholar] [CrossRef]
- Rivera, J.; Ortega-Cisneros, S.; Chavira, F. Sliding Mode Output Regulation for a Boost Power Converter. Energies 2019, 12, 879. [Google Scholar] [CrossRef] [Green Version]
- Tran, T.V.; Yoon, S.-J.; Kim, K.-H. An LQR-Based Controller Design for an LCL-Filtered Grid-Connected Inverter in Discrete-Time State-Space under Distorted Grid Environment. Energies 2018, 11, 2062. [Google Scholar] [CrossRef] [Green Version]
- Incremona, G.P.; Mirkin, L.; Colaneri, P. Integral Sliding-Mode Control with Internal Model: A Separation. IEEE Contr. Syst. Lett. 2022, 6, 446–451. [Google Scholar] [CrossRef]
- Yepes, A.G.; Freijedo, F.D.; Doval-Gandoy, J.; López, Ó.; Malvar, J.; Fernandez-Comesaña, P. Effects of discretization methods on the performance of resonant controllers. IEEE Trans. Power Electron. 2010, 25, 1692–1712. [Google Scholar] [CrossRef]
- Cordero, R.; Estrabis, T.; Brito, M.A.; Gentil, G. Development of a Resonant Generalized Predictive Controller for Sinusoidal Reference Tracking. IEEE Trans. Circuits Syst. II Exp. Briefs 2022, 69, 1218–1222. [Google Scholar] [CrossRef]
- Cordero, R.; Estrabis, T.; Batista, E.A.; Andrea, C.Q.; Gentil, G. Ramp-Tracking Generalized Predictive Control System Based on Second-Order Difference. IEEE Trans. Circuits Syst. II Exp. Briefs 2021, 68, 1283–1287. [Google Scholar] [CrossRef]
- Cordero, R.; Estrabis, T.; Gentil, G.; Batista, E.A.; Andrea, C.Q. Development of a Generalized Predictive Control system for Polynomial Reference Tracking. IEEE Trans. Circuits Syst. II Exp. Briefs 2021, 68, 2875–2879. [Google Scholar] [CrossRef]
- Prieto Cerón, C.E.; Normandia Lourenço, L.F.; Solís-Chaves, J.S.; Sguarezi Filho, A.J. A Generalized Predictive Controller for a Wind Turbine Providing Frequency Support for a Microgrid. Energies 2022, 15, 2562. [Google Scholar] [CrossRef]
- Pimentel, J.C.G.; Gad, E.; Roy, S. High-Order A -Stable and L -Stable State-Space Discrete Modeling of Continuous Systems. IEEE Trans. Circuits Syst. I Reg. Papers 2012, 59, 346–359. [Google Scholar] [CrossRef]
- Bobtsov, A.A.; Pyrkin, A.A. Cancelation of Unknown Multiharmonic Disturbance for Nonlinear Plant with Input Delay. Int. J. Adapt. Control Signal Process. 2012, 26, 302–315. [Google Scholar] [CrossRef]
- Verma, A.K.; Roncero-Sánchez, P.; Ahmed, H.; Elghali, S.B.; Busarello, T.D.C. A Robust Half-Cycle Single-Phase Prefiltered Open-Loop Frequency Estimator for Fast Tracking of Amplitude and Phase. IEEE Trans. Instrum. Meas. 2022, 71, 1–12. [Google Scholar] [CrossRef]
- Wang, L. Model Predictive Control System Design and Implementation Using Matlab®; Springer: London, UK, 2009; pp. 22–27. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Configuration | RMSE | RMSE | RMSE | RMSE |
|---|---|---|---|---|
| () | (Overall) | (Sector 1) | (Sector 2) | (Sector 3) |
| Configuration | Settling Time | Settling Time | Settling Time |
|---|---|---|---|
| () | (Sector 1) | (Sector 2) | (Sector 3) |
| Configuration | RMSE | RMSE | RMSE |
|---|---|---|---|
| () | (Overall) | (Sector 1) | (Sector 2) |
| Configuration | Settling Time | Settling Time |
|---|---|---|
| () | (Sector 1) | (Sector 2) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cordero, R.; Estrabis, T.; Gentil, G.; Caramalac, M.; Suemitsu, W.; Onofre, J.; Brito, M.; dos Santos, J. Tracking and Rejection of Biased Sinusoidal Signals Using Generalized Predictive Controller. Energies 2022, 15, 5664. https://doi.org/10.3390/en15155664
Cordero R, Estrabis T, Gentil G, Caramalac M, Suemitsu W, Onofre J, Brito M, dos Santos J. Tracking and Rejection of Biased Sinusoidal Signals Using Generalized Predictive Controller. Energies. 2022; 15(15):5664. https://doi.org/10.3390/en15155664
Chicago/Turabian StyleCordero, Raymundo, Thyago Estrabis, Gabriel Gentil, Matheus Caramalac, Walter Suemitsu, João Onofre, Moacyr Brito, and Juliano dos Santos. 2022. "Tracking and Rejection of Biased Sinusoidal Signals Using Generalized Predictive Controller" Energies 15, no. 15: 5664. https://doi.org/10.3390/en15155664
APA StyleCordero, R., Estrabis, T., Gentil, G., Caramalac, M., Suemitsu, W., Onofre, J., Brito, M., & dos Santos, J. (2022). Tracking and Rejection of Biased Sinusoidal Signals Using Generalized Predictive Controller. Energies, 15(15), 5664. https://doi.org/10.3390/en15155664