
Bus Voltage Control of Photovoltaic Grid Connected Inverter Based on Adaptive Linear Active Disturbance Rejection

Abstract
:1. Introduction
- (1)
- Considering the structure diagram of the inverter, KVL law, and KCl law, the mathematical model of the inverter is established. In addition, to solve the AC coupling component that is laborious to analyze in the mathematical model, the mathematical model changes through the coordinate system, which is more instrumental in the design of the controller and the research and analysis of the system.
- (2)
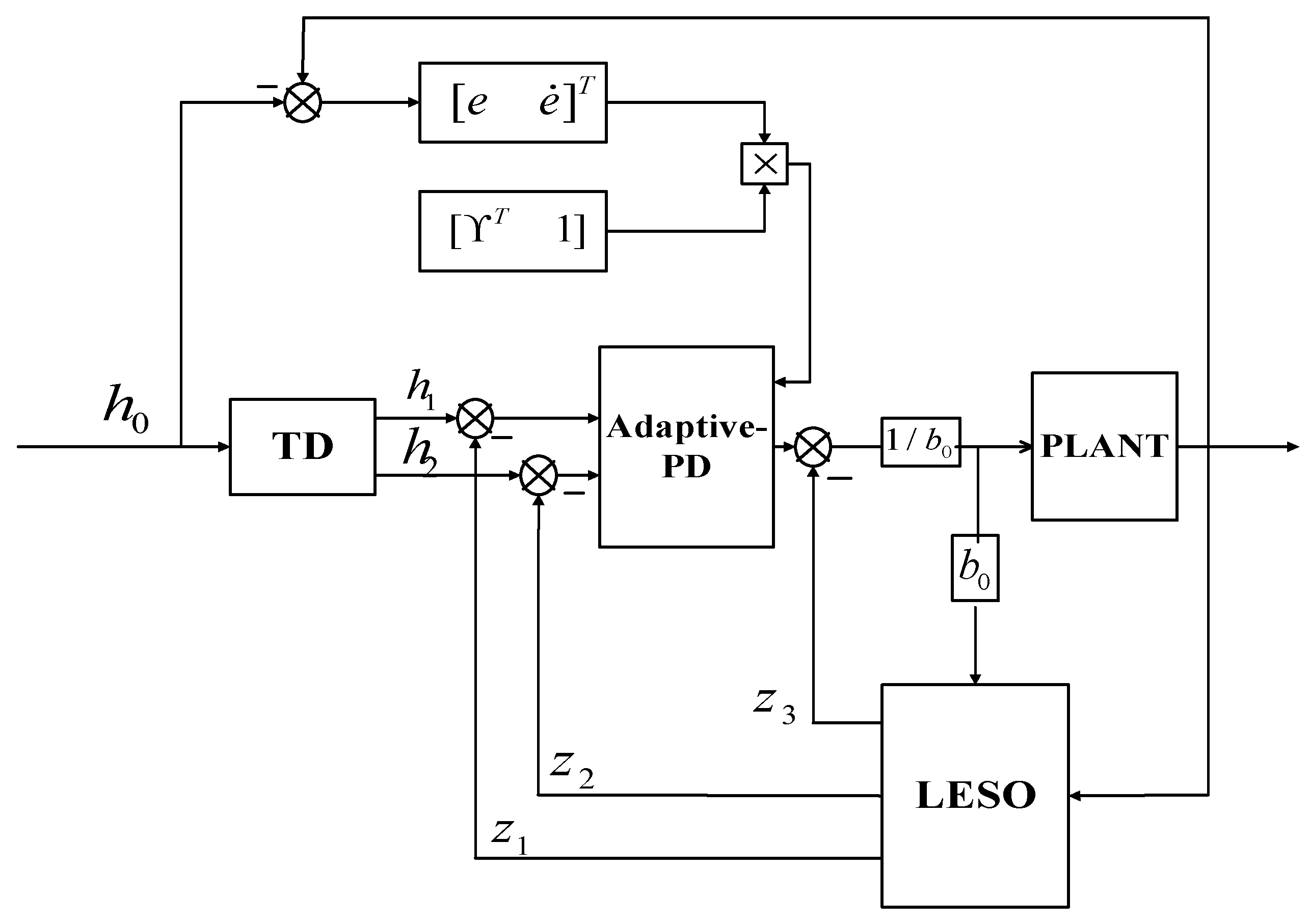
- An inverter control strategy of A–LADRC is proposed. In practical engineering, the bus voltage controlled by the inverter will fluctuate under the influence of light mutation, low voltage ride through, and other faults, which will affect the power quality. On the basis of double closed-loop control, this control strategy uses LADRC to enhance the anti-interference ability and designs a good adaptive control scheme and applies it to the PD controller of LADRC. By changing the and in real time, the controller has better control performance in the initial transient process and fault occurrence.
- (3)
- It is proved that the system is uniformly stable by Lyapunov theory, and it is further proved that the system is uniformly asymptotically stable by the Barbalat theorem. Compared with LADRC and PI, this scheme has stronger anti-interference ability and less response time in the case of light mutation and low voltage ride through fault.
2. Mathematical Model of Grid-Connected PV Inverter
- 1.
- The power supply is equivalent to three-phase symmetrical sinusoidal voltage source.
- 2.
- The switch is considered to be an ideal switch without switching delay and loss.
3. Inverter Control Strategy
4. Stability Analysis
5. Experiment and Simulation Analysis
6. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| A–LADRC | Adaptive-linear active disturbance rejection control |
| LADRC | Linear active disturbance rejection control |
| TD | Tracking differentiator |
| LESF | Linear error state feedback control law |
| AFC | Adaptive fuzzy control |
| NPC | Neutral point clamped |
| MPPT | Maximum power point tracking |
| DISMC | Dual integral sliding mode controller |
Nomenclature
| L | AC measured filter inductance |
| R | Equivalent series resistance of the filter inductance |
| Cl | AC measured filter capacitance |
| C | DC side capacitance |
| Sk | Switching function |
| igk | Grid side current |
| egk | Grid voltage |
| ugk | Inverter terminal voltage |
| Udc | DC bus voltage |
| is | Output current of the previous converter |
| ω | Angular frequency |
| b | Fast factor |
| a | Sampling time |
| h0(t) | Initial signal |
| h1(t) | Initial signal tracking signal |
| h2(t) | Initial signal differential tracking signal |
| fn(t), gn(t) | Nonlinear function |
| m(t) | Destabilization of the system |
| β1, β2, β3 | Observer gains |
| ω0 | Bandwidth of LESO |
| upd | Output control signals of PD controller |
| uL | Output control signals of LESF |
| kp,kd | Parameters of PD controller |
| e2 | Tracking error |
| η | Filtering tracking error |
References
- Lunardi, A.; Lourenço, L.F.N.; Munkhchuluun, E.; Meegahapola, L.; Filho, A.J.S. Grid-Connected Power Converters: An Overview of Control Strategies for Renewable Energy. Energies 2022, 15, 4151. [Google Scholar] [CrossRef]
- Sharma, A.; Sharma, A.; Jately, V.; Averbukh, M.; Rajput, S.; Azzopardi, B. A Novel TSA-PSO Based Hybrid Algorithm for GMPP Tracking under Partial Shading Conditions. Energies 2022, 15, 3164. [Google Scholar] [CrossRef]
- Demirbas, A. Global Renewable Energy Projections. Energy Sources B Econ. Plan. Policy 2009, 4, 212–224. [Google Scholar] [CrossRef]
- Hassaine, L.; Olias, E.; Quintero, J.; Salas, V. Overview of power inverter topologies and control structures for grid connected photovoltaic systems. Renew. Sustain. Energy Rev. 2014, 30, 796–807. [Google Scholar] [CrossRef]
- Yang, Y.; Blaabjerg, F.; Wang, H.; Simões, M.G. Power control flexibilities for grid-connected multi-functional photovoltaic inverters. IET Renew. Power Gener. 2016, 10, 504–513. [Google Scholar] [CrossRef] [Green Version]
- Romero-Cadaval, E.; Francois, B.; Malinowski, M.; Zhong, Q.-C. Grid-Connected Photovoltaic Plants: An Alternative Energy Source, Replacing Conventional Sources. IEEE Ind. Electron. Mag. 2015, 9, 18–32. [Google Scholar] [CrossRef]
- Xavier, L.; Cupertino, A.F.; Pereira, H.A. Ancillary services provided by photovoltaic inverters: Single and three phase control strategies. Comput. Electr. Eng. 2018, 70, 102–121. [Google Scholar] [CrossRef]
- Shadoul, M.; Yousef, H.; Abri, R.; Al-Hinai, A. Adaptive Fuzzy Approximation Control of PV Grid-Connected Inverters. Energies 2021, 14, 942. [Google Scholar] [CrossRef]
- Callegari, J.; Cupertino, A.; Ferreira, V.; Brito, E.; Mendes, V.; Pereira, H. Adaptive dc-link voltage control strategy to increase PV inverter lifetime. Microelectron. Reliab. 2019, 100–101, 113439. [Google Scholar] [CrossRef]
- Zhang, Q.; Zhuang, X.; Liu, Y.; Wang, C.; Guo, H. A novel control strategy for mode seamless switching of PV converter in DC microgrid based on double integral sliding mode control. ISA Trans. 2019, 100, 469–480. [Google Scholar] [CrossRef] [PubMed]
- Liu, H.; Jiang, J.; Wu, H.; Wang, W. Reliability evaluation of PV converter based on modified hybrid power control method. Microelectron. Reliab. 2019, 113386, 100–101. [Google Scholar] [CrossRef]
- Shareef, H.; Mutlag, A.H.; Mohamed, A. A novel approach for fuzzy logic PV inverter controller optimization using lightning search algorithm. Neurocomputing 2015, 168, 435–453. [Google Scholar] [CrossRef]
- Malakondareddy, B.; Kumar, S.S.; Gounden, N.A.; Anand, I. An adaptive PI control scheme to balance the neutral-point voltage in a solar PV fed grid connected neutral point clamped inverter. Int. J. Electr. Power Energy Syst. 2019, 110, 318–331. [Google Scholar] [CrossRef]
- Silva, J.F. Sliding-mode control of boost-type unity-power-factor PWM rectifiers. IEEE Trans. Ind. Electron. 1999, 46, 594–603. [Google Scholar] [CrossRef]
- Liu, D.; Xu, J.; Xue, R.; Song, C.; Zhou, Z. Research on Photovoltaic Grid-Connected Control Strategy Based on Active Disturbance Rejection of Adaptive Extended State Observer. Adv. Civ. Eng. 2021, 2021, 9014317. [Google Scholar] [CrossRef]
- Aboudrar, I.; El Hani, S.; Mediouni, H.; Aghmad, A.; Heyine, M.S. Robust control of three phase grid connected PV system based on ADRC and fuzzy. In Proceedings of the International Renewable and Sustainable Energy Conference (IRSEC), Rabat, Morocco, 5–8 December 2018. [Google Scholar]
- Boukhriss, A. Active Disturbance Rejection Control Applied to a Three-Phase Grid-Connected Photovoltaic System. Adv. Electr. Comput. Eng. 2022, 22, 87–94. [Google Scholar] [CrossRef]
- Zhou, X.; Liu, Q.; Ma, Y. DC-Link Voltage Research of Photovoltaic Grid-Connected Inverter Using Improved Active Disturbance Rejection Control. IEEE Access 2021, 9, 9884–9894. [Google Scholar] [CrossRef]
- Liu, C.; Cheng, Y.; Liu, D.; Cao, G.; Lee, I. Research on a LADRC Strategy for Trajectory Tracking Control of Delta High-Speed Parallel Robots. Math. Probl. Eng. 2020, 2020, 9014317. [Google Scholar] [CrossRef]
- Guo, B.; Bacha, S.; Alamir, M.; Mohamed, A.; Boudinet, C. LADRC applied to variable speed micro-hydro plants: Experimental validation. Control Eng. Pract. 2019, 85, 290–298. [Google Scholar] [CrossRef]
- Ma, X.J.; Zeng, Q.H.; Yuan, D. Speed tracking of PMSM drive for hybrid electric vehicle based on LADRC. In Proceedings of the IEEE Conference and Expo Transportation Electrification Asia-Pacific (ITEC Asia-Pacific), Beijing, China, 31 August–3 September 2014. [Google Scholar]
- Ma, Y.; Sun, X.; Zhou, X. Research on D-STATCOM Double Closed-Loop Control Method Based on Improved First-Order Linear Active Disturbance Rejection Technology. Energies 2020, 13, 3958. [Google Scholar] [CrossRef]
- Liu, K.; He, J.; Luo, Z.; Shen, X.; Liu, X.; Lu, T. Secondary Frequency Control of Isolated Microgrid Based on LADRC. IEEE Access 2019, 7, 53454–53462. [Google Scholar] [CrossRef]
- Sun, C.; Liu, M.; Liu, C.; Feng, X.; Wu, H. An Industrial Quadrotor UAV Control Method Based on Fuzzy Adaptive Linear Active Disturbance Rejection Control. Electronics 2021, 10, 376. [Google Scholar] [CrossRef]
- Dang, C.; Tong, X.; Song, W. Sliding-mode control in dq-frame for a three-phase grid-connected inverter with LCL-filter. J. Frankl. Inst. 2020, 357, 10159–10174. [Google Scholar] [CrossRef]
- Roinila, T.; Messo, T.; Suntio, T.; Vilkko, M. Pseudo-Random Sequences in DQ-Domain Analysis of Feedforward Control in Grid-Connected Inverters. IFAC-Pap. 2015, 48, 1301–1306. [Google Scholar] [CrossRef]
- Zhang, Y.; Tian, M.; Zhang, H.; Song, J.; Zhang, W. Admittance Modeling and Stability Enhancement of Grid-connected Inverter Considering Frequency Coupling in Weak Grids. Electr. Power Syst. Res. 2022, 209. [Google Scholar] [CrossRef]
- Mostafa, S.; Zekry, A.; Youssef, A.; Anis, W.R. Raspberry Pi Design and Hardware Implementation of Fuzzy-PI Controller for Three-Phase Grid-Connected Inverter. Energies 2022, 15, 843. [Google Scholar] [CrossRef]
- Piccini, A.R.; Guimarães, G.C.; de Souza, A.C.; Denardi, A.M. Implementation of a Photovoltaic Inverter with Modified Automatic Voltage Regulator Control Designed to Mitigate Momentary Voltage Dip. Energies 2021, 14, 6244. [Google Scholar] [CrossRef]
- Wang, Z.; Zhao, T. Adaptive-based linear active disturbance rejection attitude control for quadrotor with external disturbances. Trans. Inst. Meas. Control 2021, 44, 286–298. [Google Scholar] [CrossRef]
- Cong, M.X.; Zhao, T. Active Disturbance Rejection Trajectory Tracking Control of Manipulator Based on Neural Network. In Proceedings of the 2020 Chinese Control and Decision Conference, Hefei, China, 22–24 August 2020; pp. 1732–1737. [Google Scholar]
- Liu, W.; Zhao, T.; Wu, Z.; Huang, W. Linear active disturbance rejection control for hysteresis compensation based on backpropagation neural networks adaptive control. Trans. Inst. Meas. Control 2020, 43, 915–924. [Google Scholar] [CrossRef]
- Liu, W.; Zhao, T. An active disturbance rejection control for hysteresis compensation based on Neural Networks adaptive control. ISA Trans. 2020, 109, 81–88. [Google Scholar] [CrossRef]
- Gao, K.; Song, J.; Yang, E. Stability analysis of the high-order nonlinear extended state observers for a class of nonlinear control systems. Trans. Inst. Meas. Control 2019, 41, 4370–4379. [Google Scholar] [CrossRef] [Green Version]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 0.2 | 5 | 3000 | 700 | 250 | 900 |
| Symbol | Description | Numerical Value |
|---|---|---|
| Udc | DC Bus Voltage | 800 V |
| C | DC Bus Capacitance | 100 μF |
| R | Equivalent resistance at grid side | 0.001 Ω |
| L | Filter inductance at grid side | 50 mH |
| Cl | Filter capacitor at grid side | 0.1 μF |
| F | Grid Frequency | 50 Hz |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, M.; Zhuang, K.; Zhao, T.; Chen, X.; Xue, J.; Qiao, Z.; Cui, S.; Gao, Y. Bus Voltage Control of Photovoltaic Grid Connected Inverter Based on Adaptive Linear Active Disturbance Rejection. Energies 2022, 15, 5556. https://doi.org/10.3390/en15155556
Zhang M, Zhuang K, Zhao T, Chen X, Xue J, Qiao Z, Cui S, Gao Y. Bus Voltage Control of Photovoltaic Grid Connected Inverter Based on Adaptive Linear Active Disturbance Rejection. Energies. 2022; 15(15):5556. https://doi.org/10.3390/en15155556
Chicago/Turabian StyleZhang, Miao, Keyu Zhuang, Tong Zhao, Xianli Chen, Jingze Xue, Zheng Qiao, Shuai Cui, and Yunlong Gao. 2022. "Bus Voltage Control of Photovoltaic Grid Connected Inverter Based on Adaptive Linear Active Disturbance Rejection" Energies 15, no. 15: 5556. https://doi.org/10.3390/en15155556
APA StyleZhang, M., Zhuang, K., Zhao, T., Chen, X., Xue, J., Qiao, Z., Cui, S., & Gao, Y. (2022). Bus Voltage Control of Photovoltaic Grid Connected Inverter Based on Adaptive Linear Active Disturbance Rejection. Energies, 15(15), 5556. https://doi.org/10.3390/en15155556