
Research on a Limit Analytical Method for a Low-Speed Micro Permanent Magnet Torque Motor with Back Winding

Abstract
:1. Introduction
2. Structure and Advantage Analysis of the BWPMTM
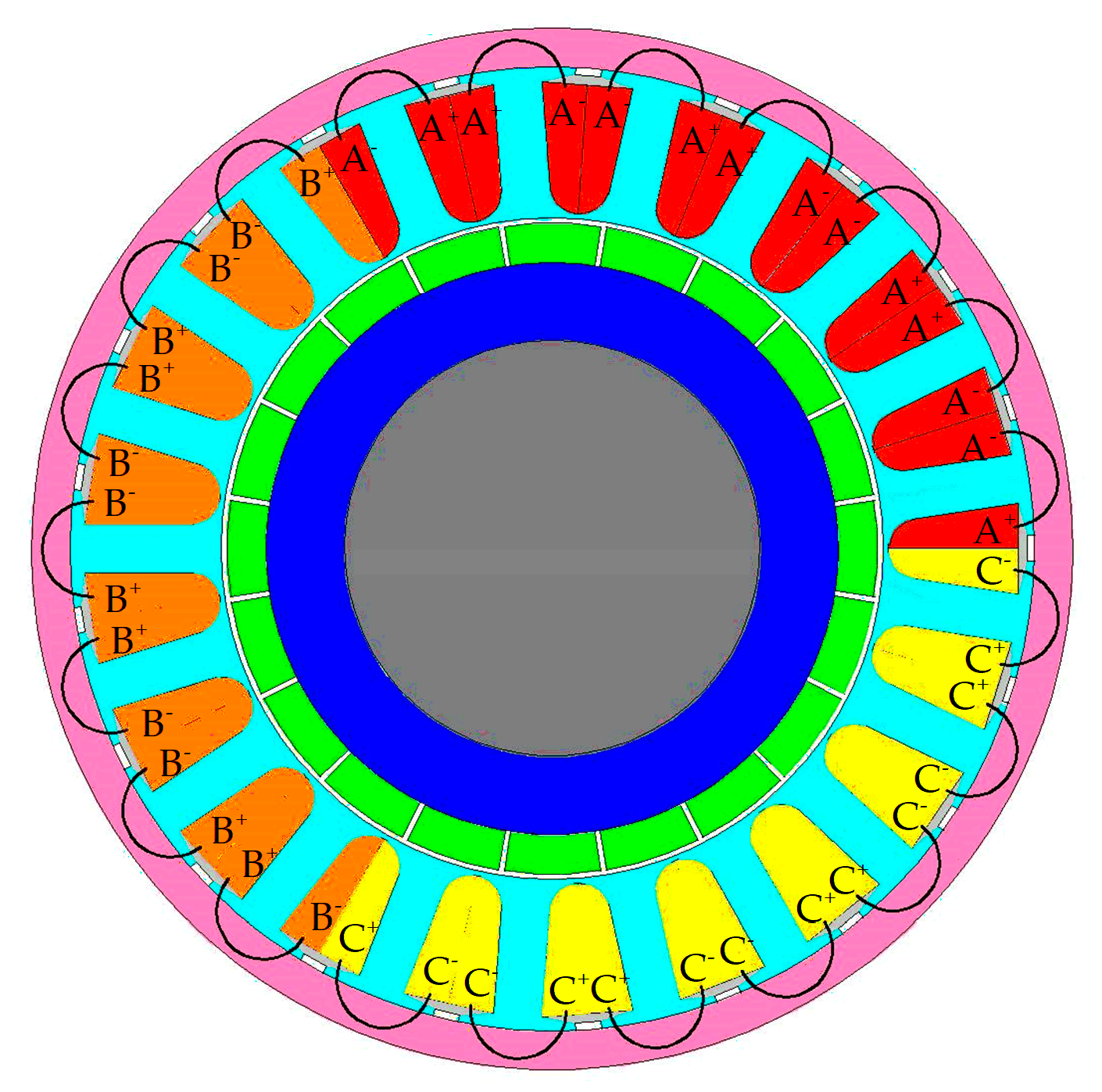
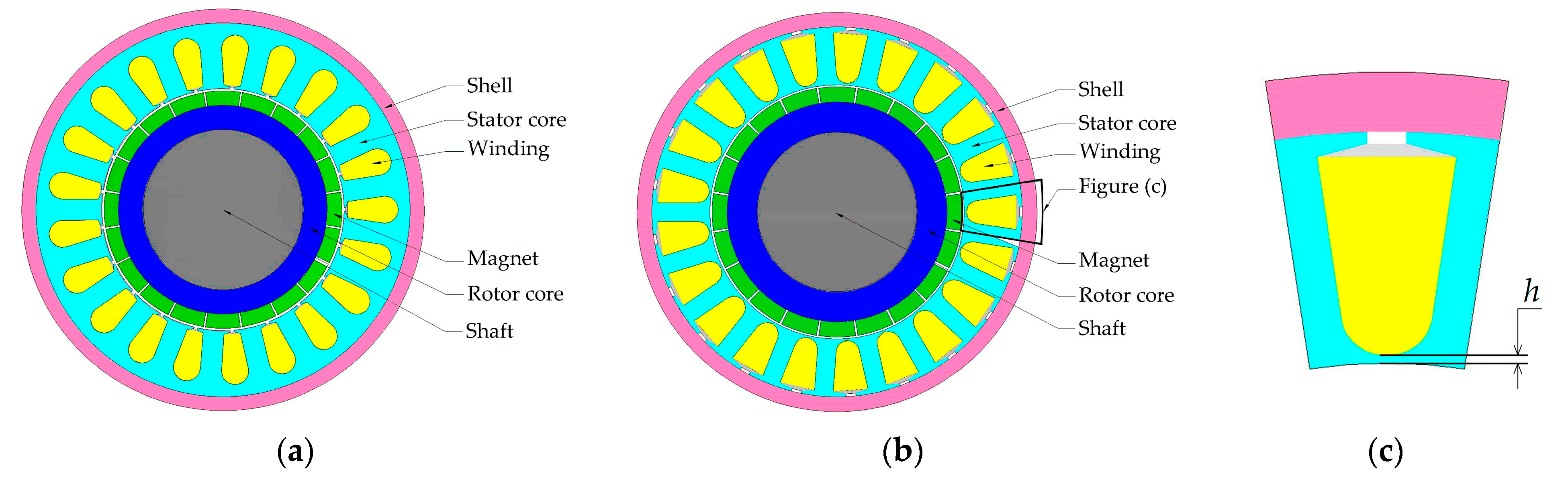
2.1. Motor Structure
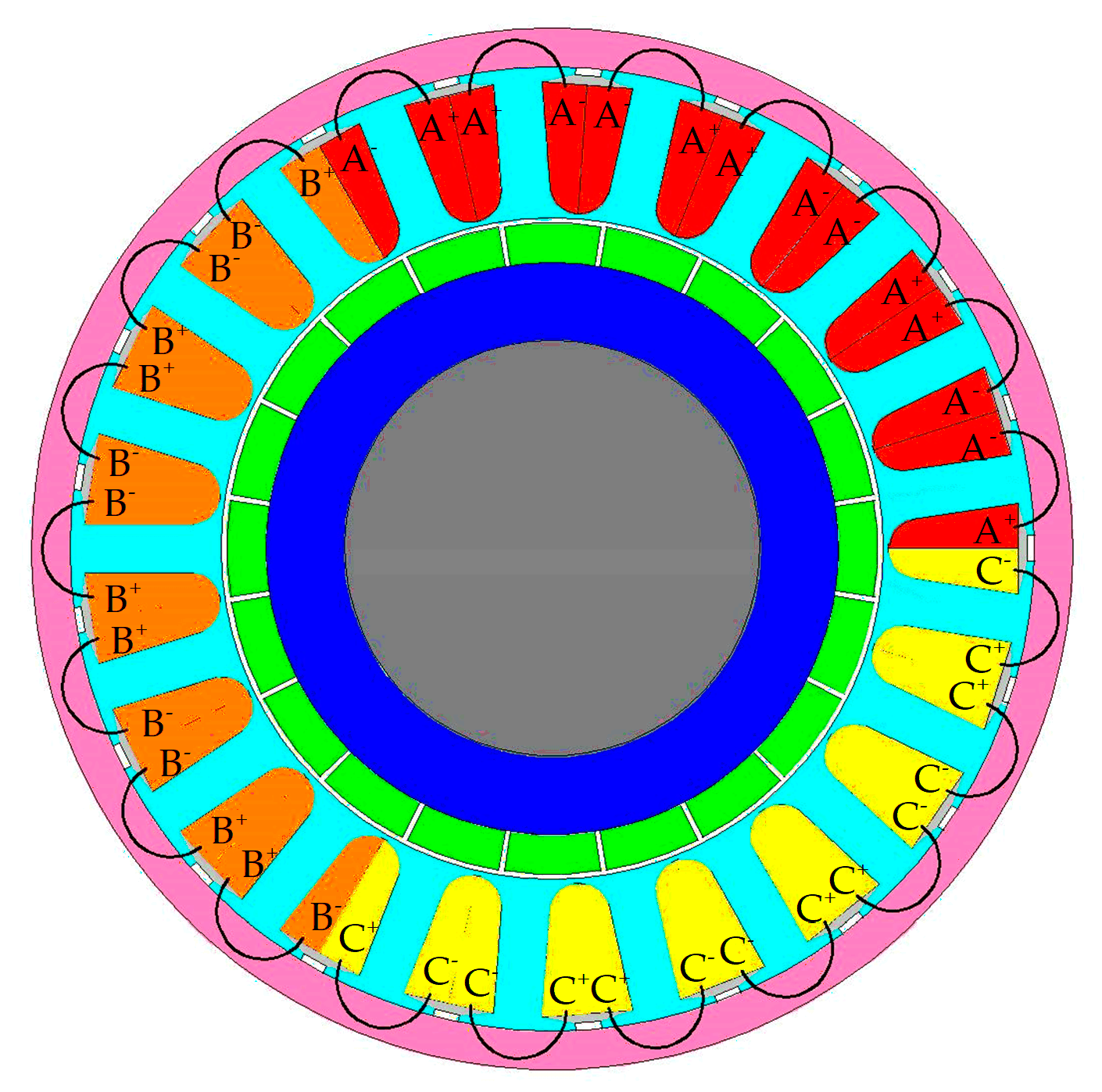
2.2. Fractional Slot Concentrated Winding
2.3. Advantage in Torque Density
3. Limit Analytical Method
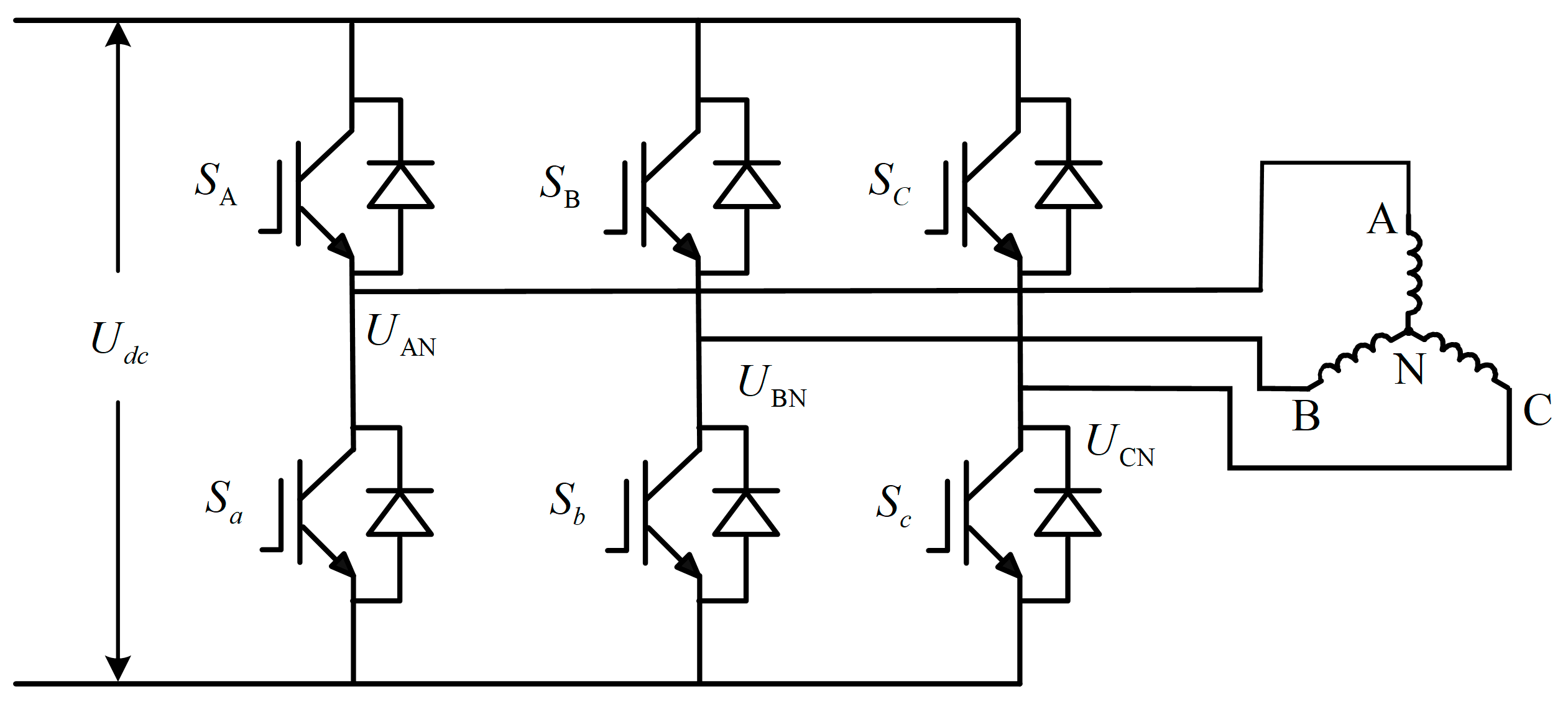
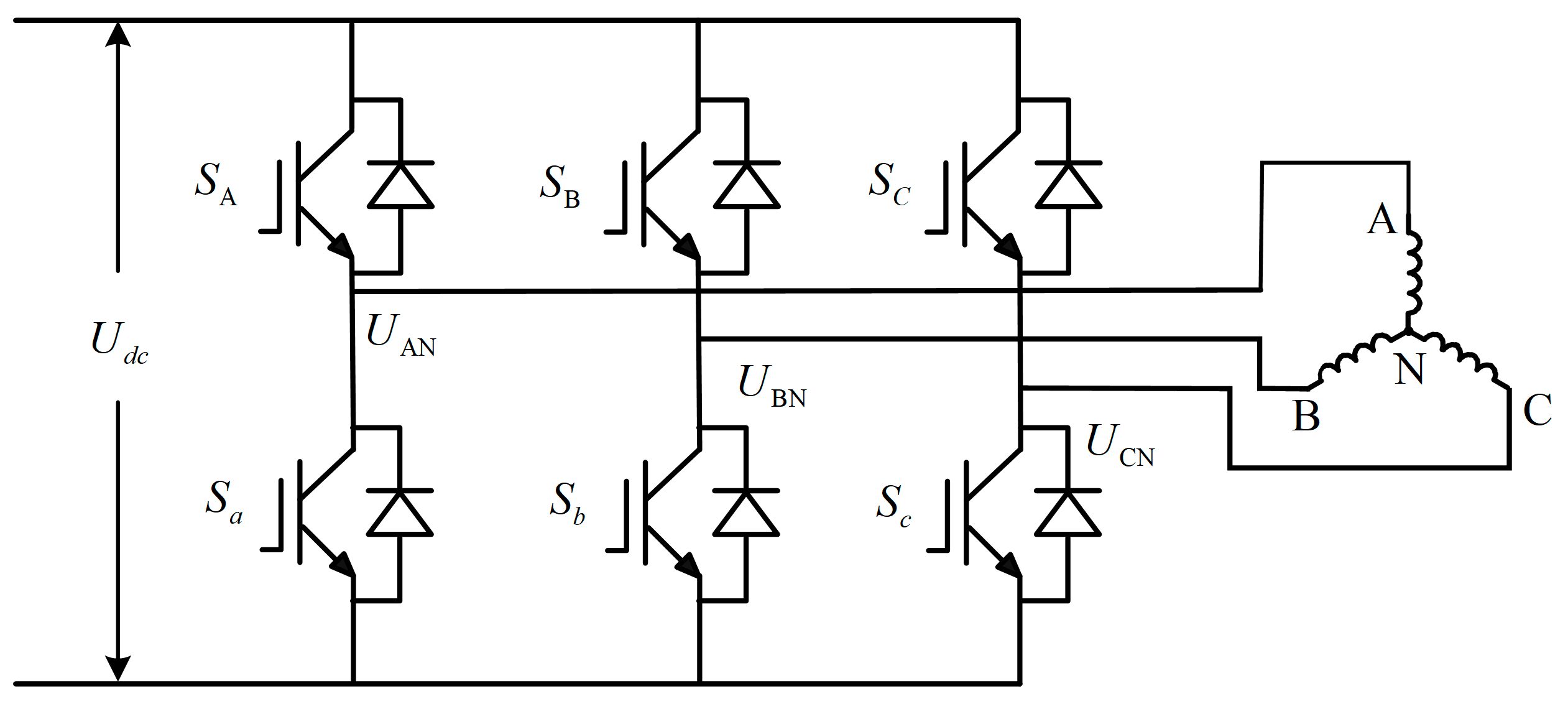
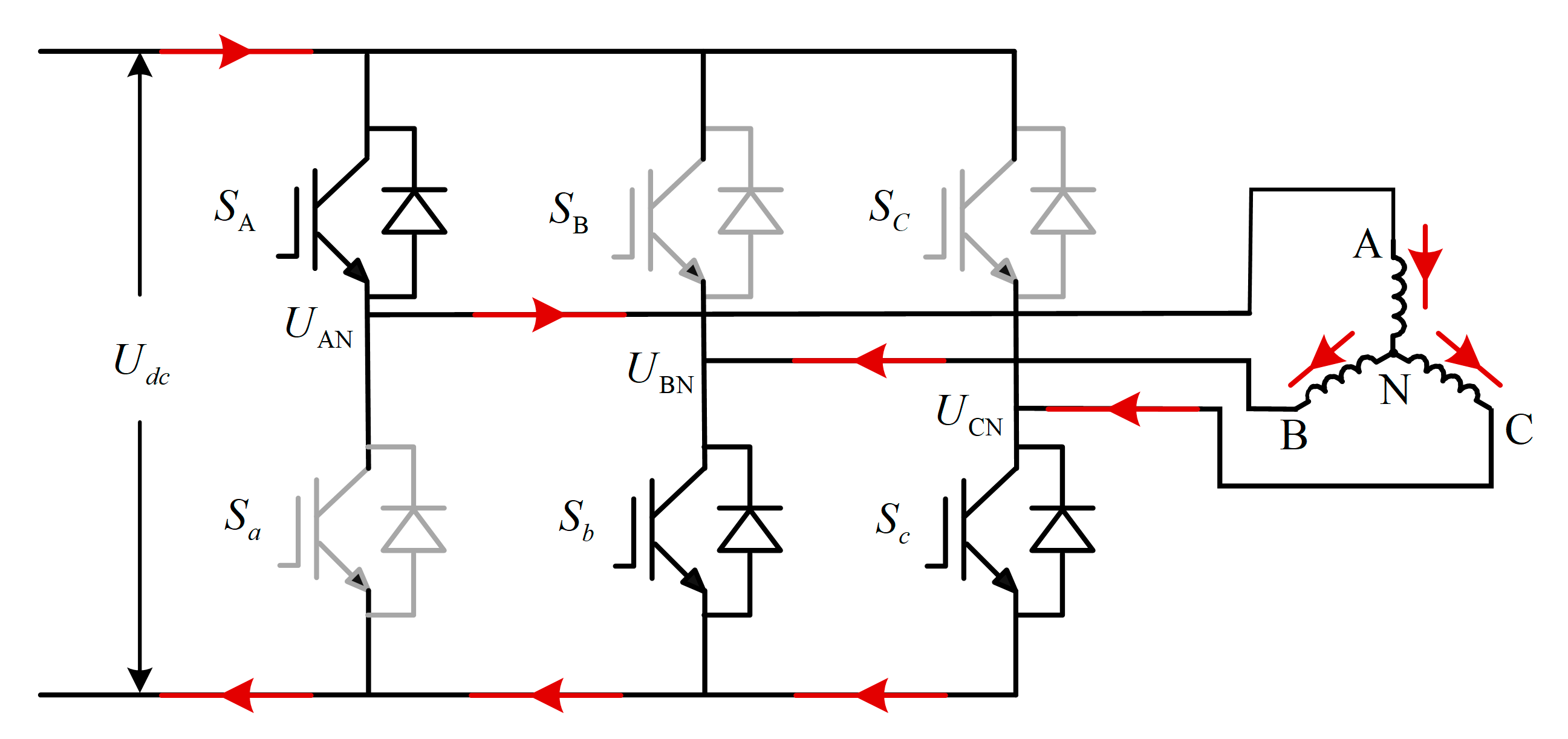
3.1. The Control Circuit of the Motor
3.2. Constraint of No-Load Back EMF
3.3. Constraint of Slot Space Factor
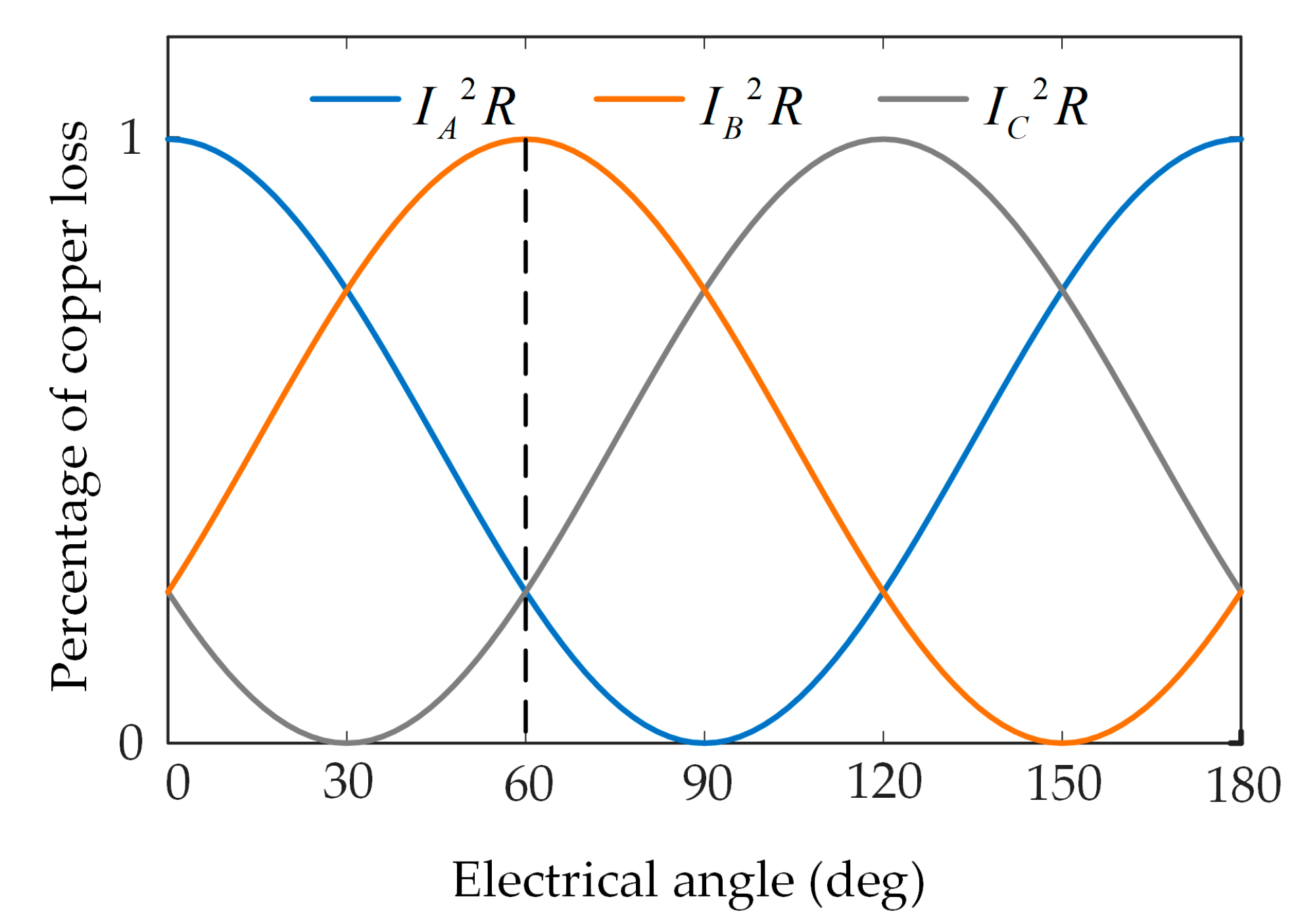
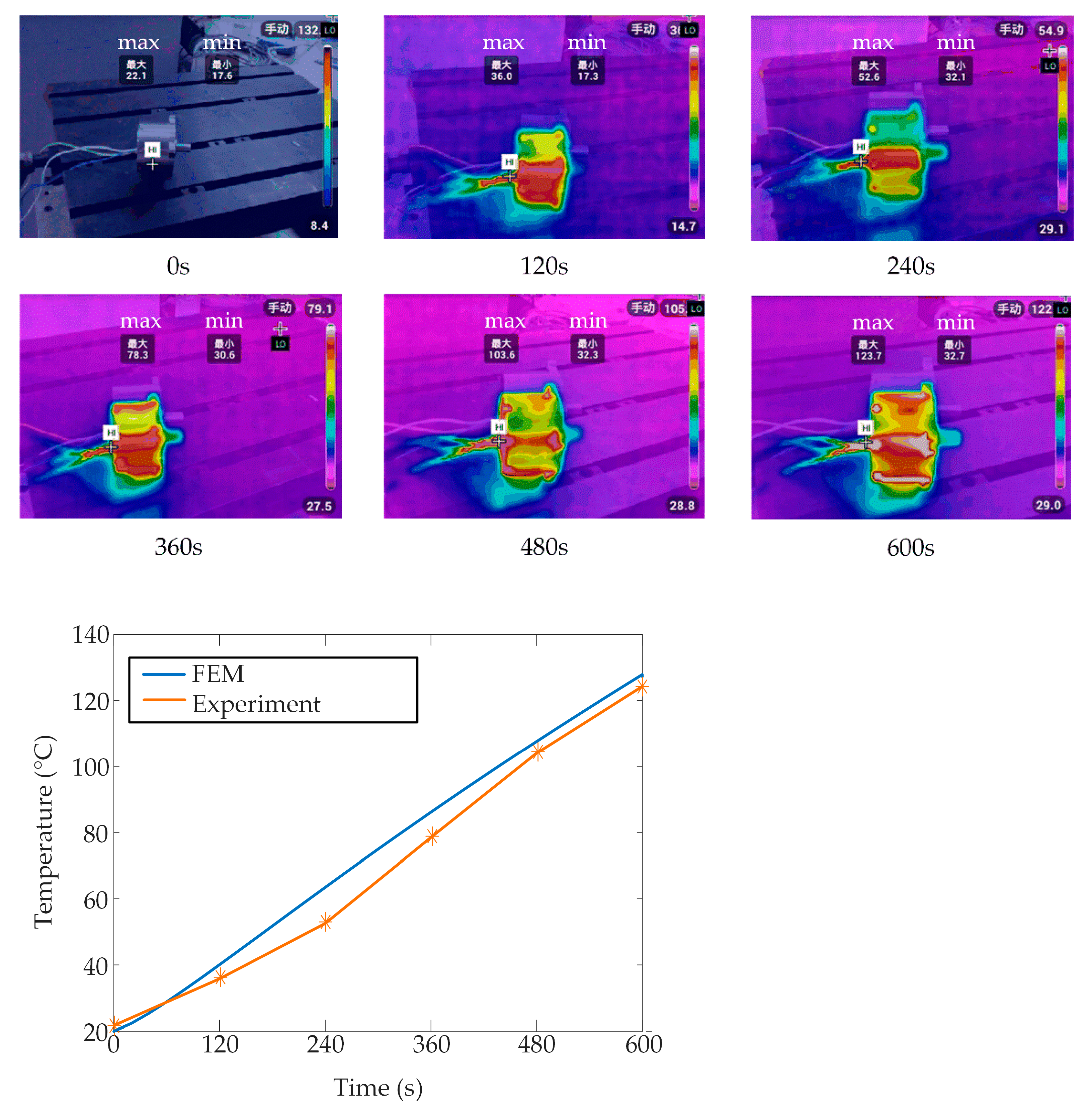
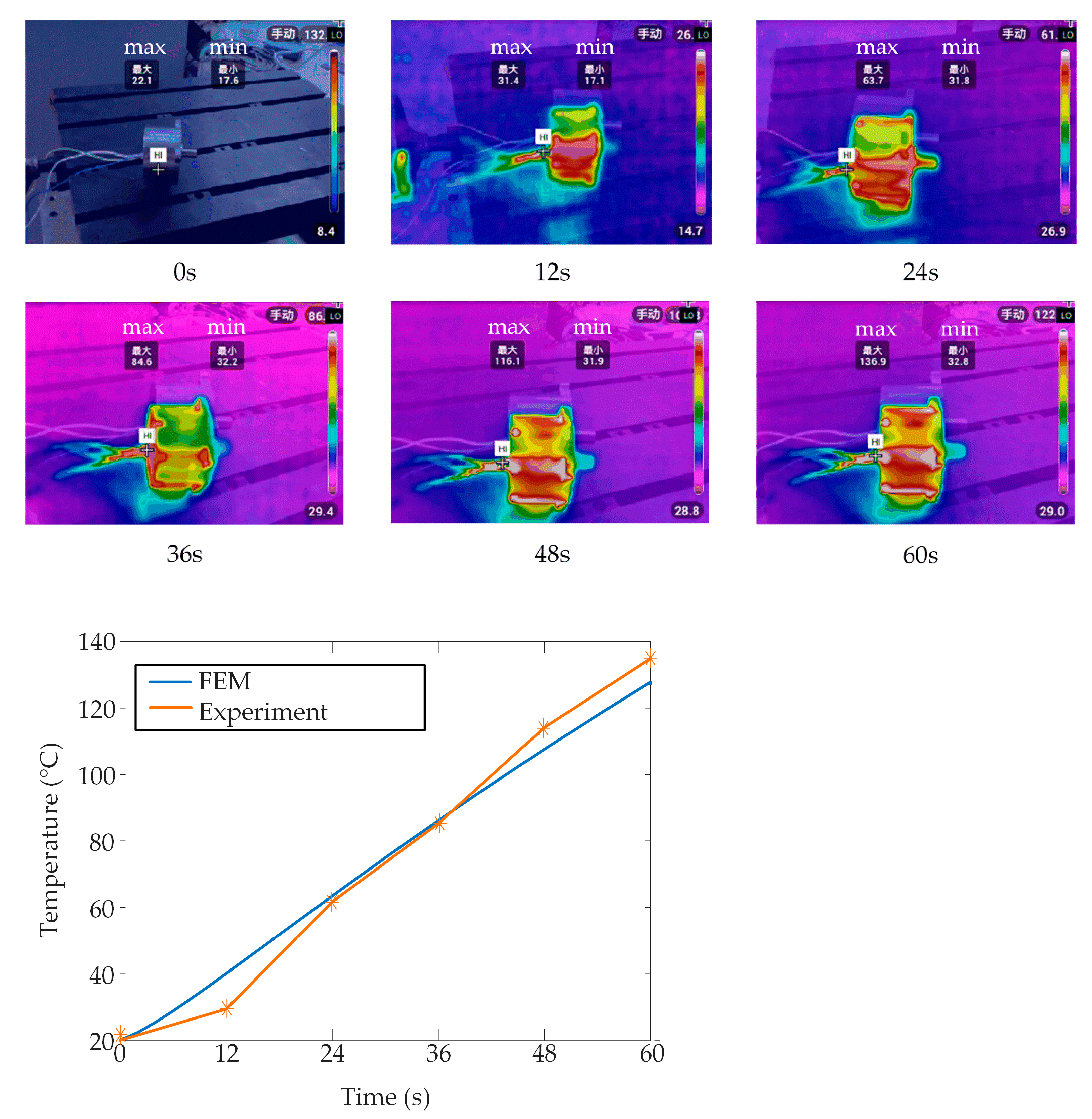
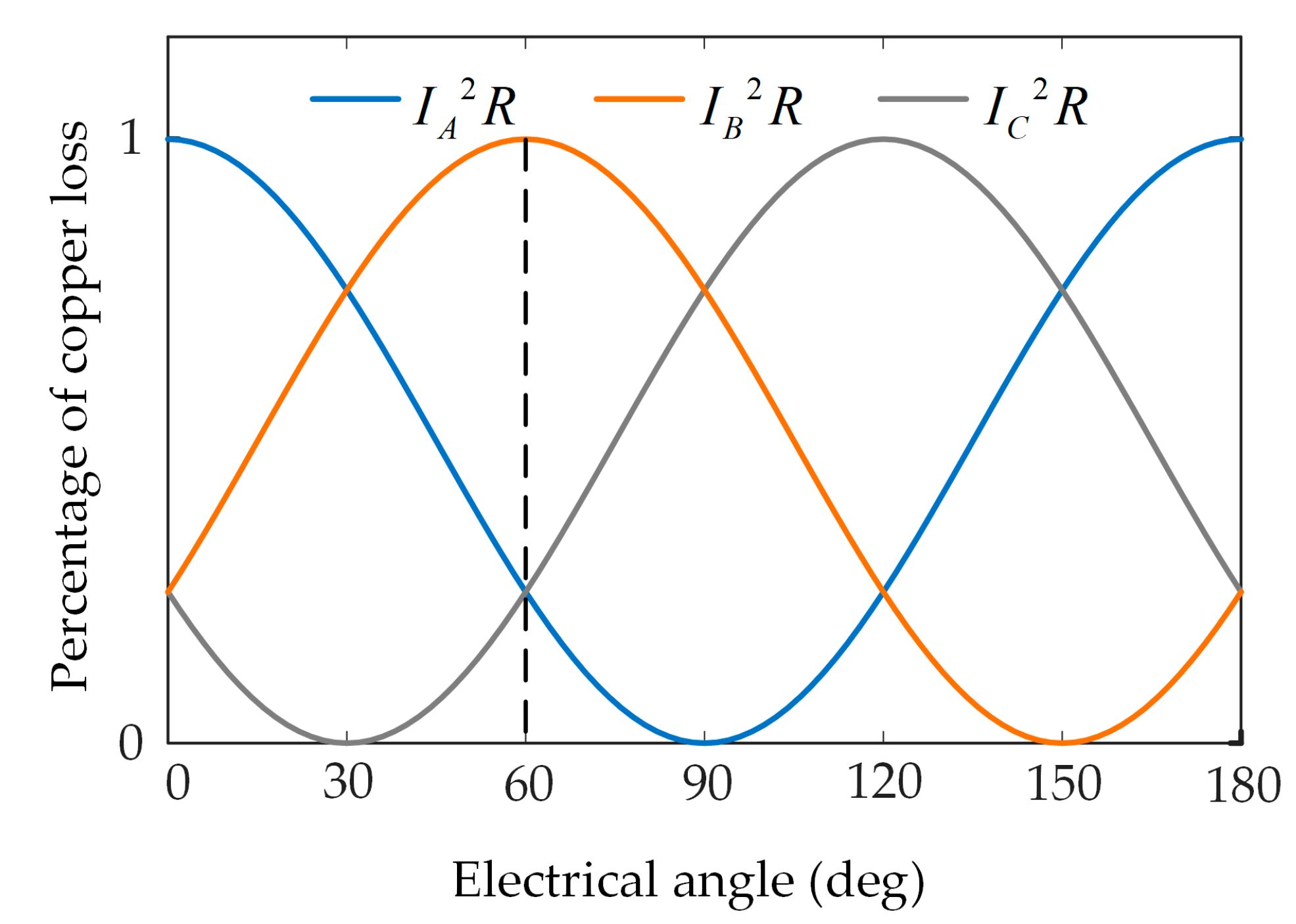
3.4. Constraint of Temperature
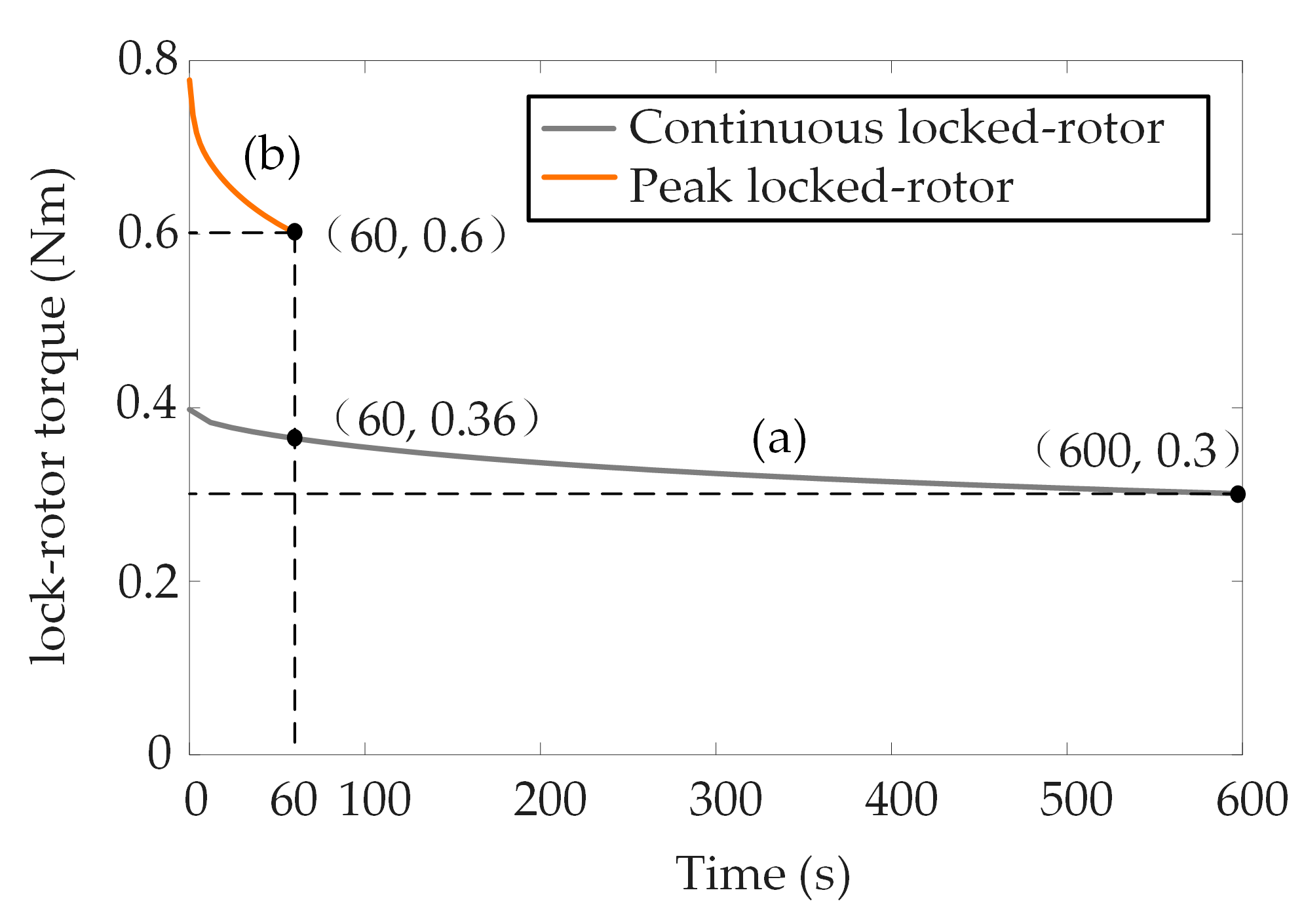
3.5. Constraint of Torque
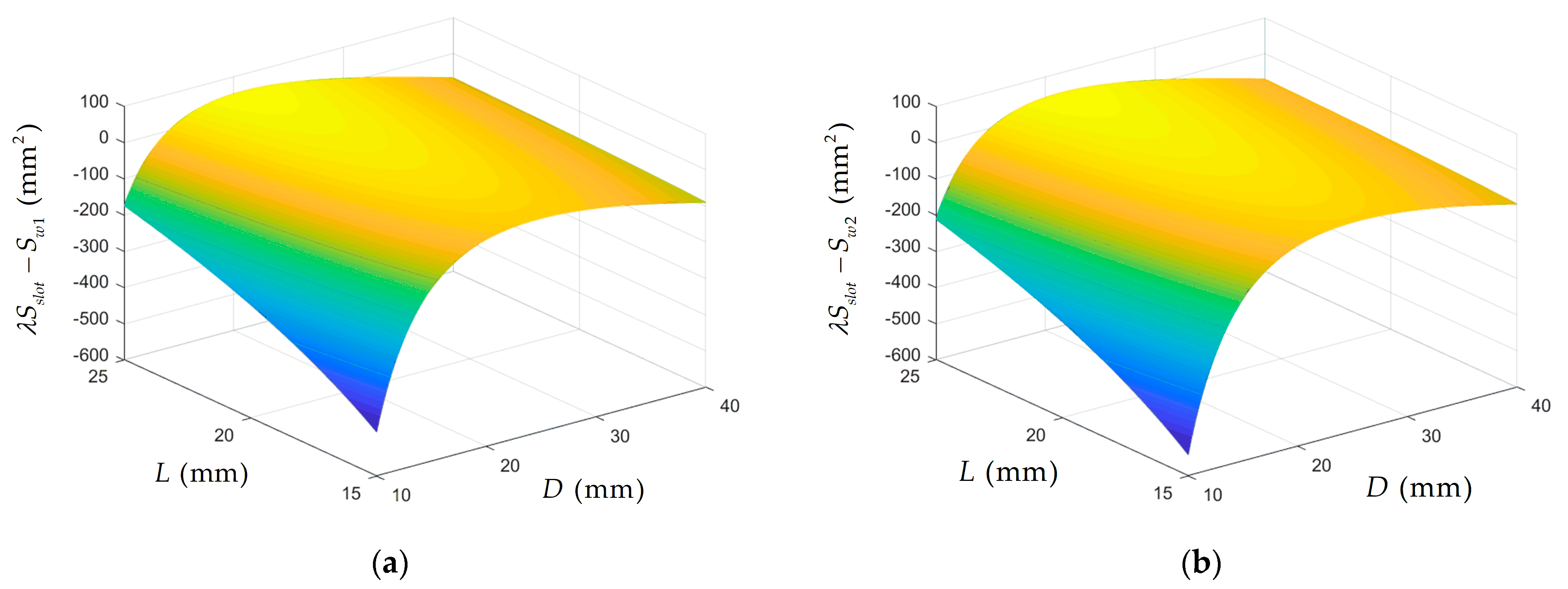
3.6. Design of the Magnetic Barrier
- The magnetic barrier should be as small as possible so that the magnetic flux at the slot bottom is in a state of oversaturation. This allows magnetic flux to pass through the stator teeth to the greatest extent possible, reducing magnetic leakage and improving the efficiency of the permanent magnet.
- The thickness of the stator stamping die is generally larger than 0.15 mm–0.2 mm in the manufacturing process. In view of the wear of the die on the stamping die and the service life of the stamping die, is selected. The maximum force that the slot bottom bears can be expressed as , where is the yield strength and is the thickness of the silicon steel sheet. To ensure the safe operation of the motor, it is taken to be 50% of the yield strength of the silicon steel sheet for the purpose of calculation. The force that the magnetic barrier bears during processing is less than .
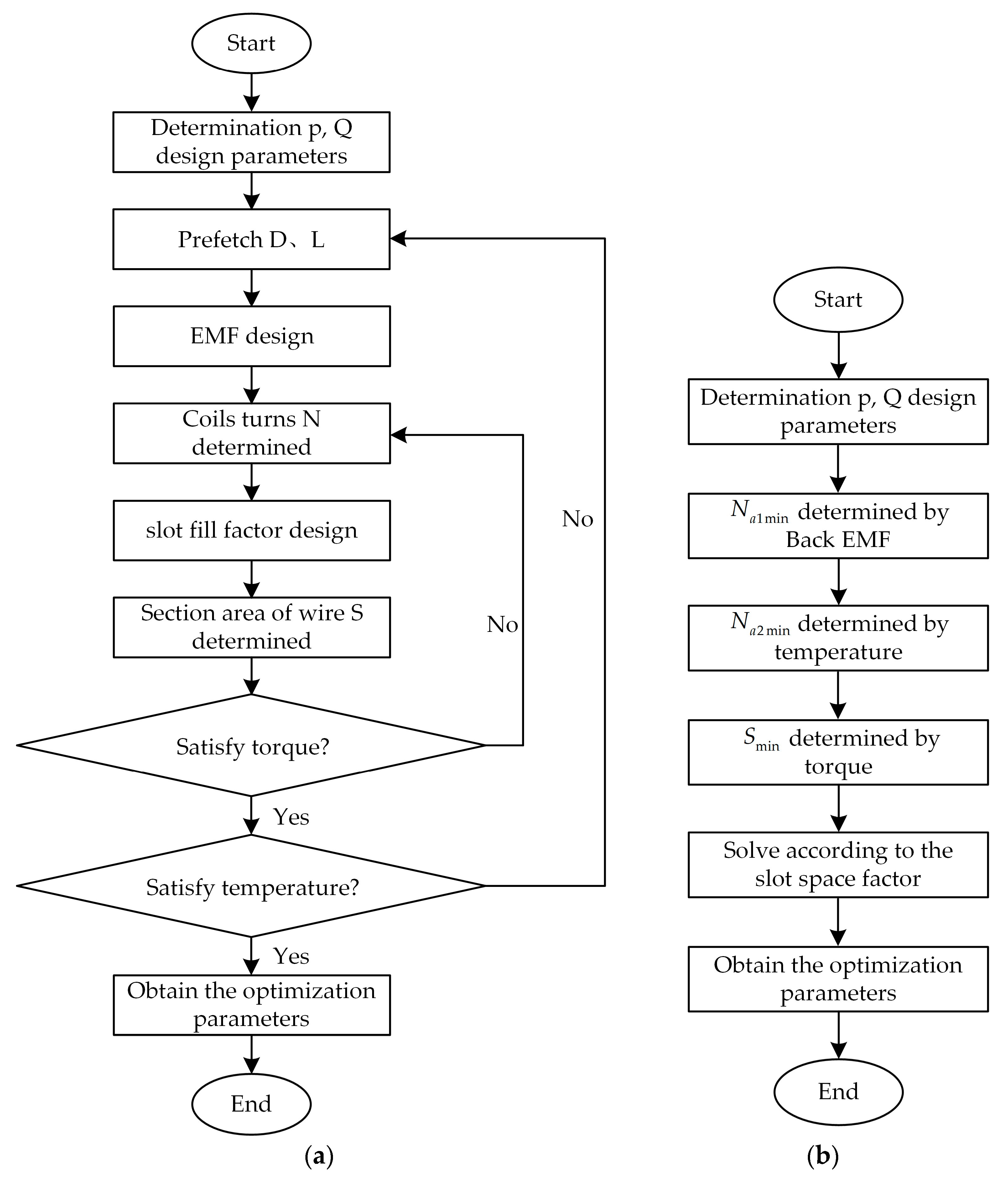
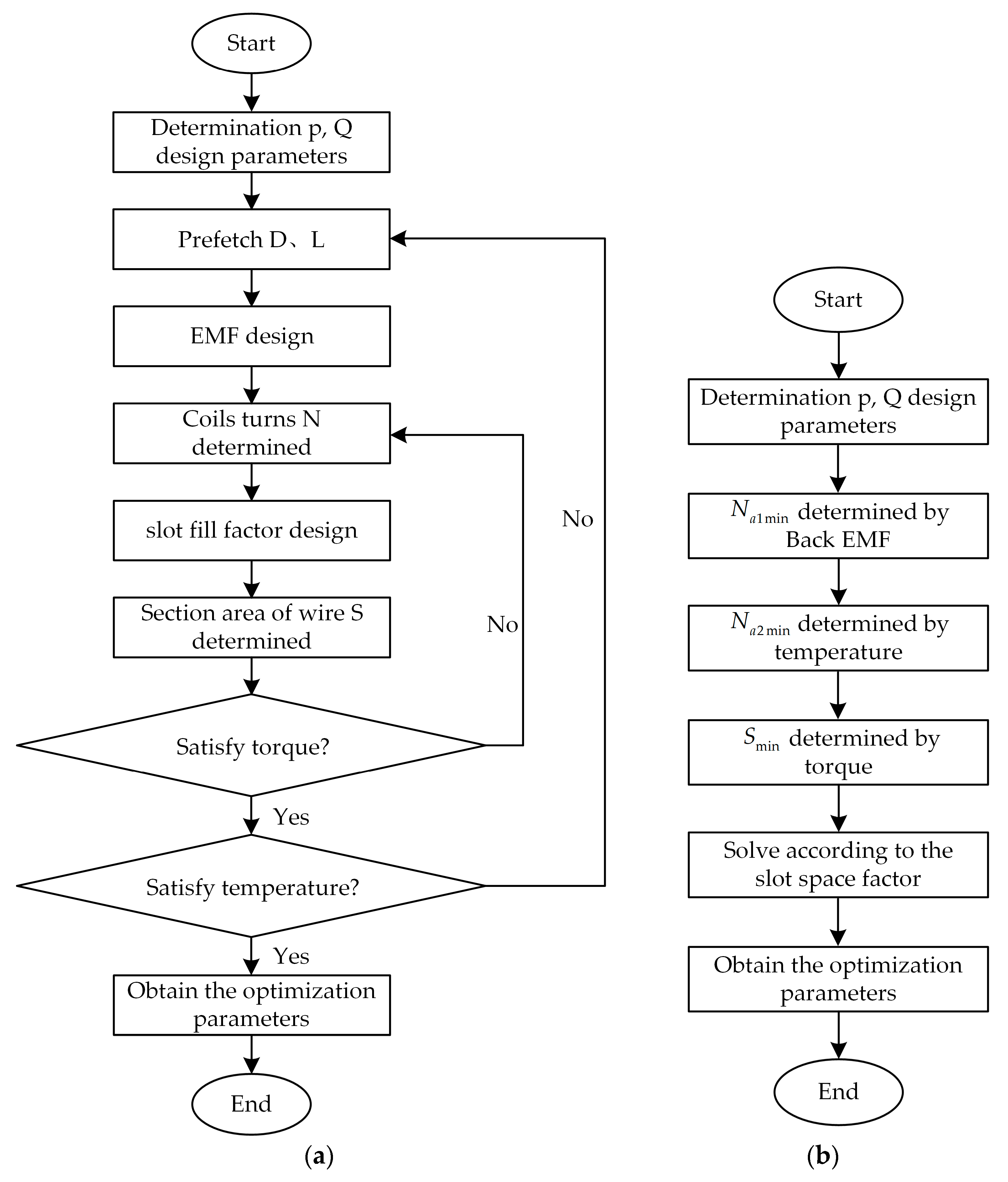
3.7. The Solution of Optimal Parameters
4. Simulation Results and Discussion
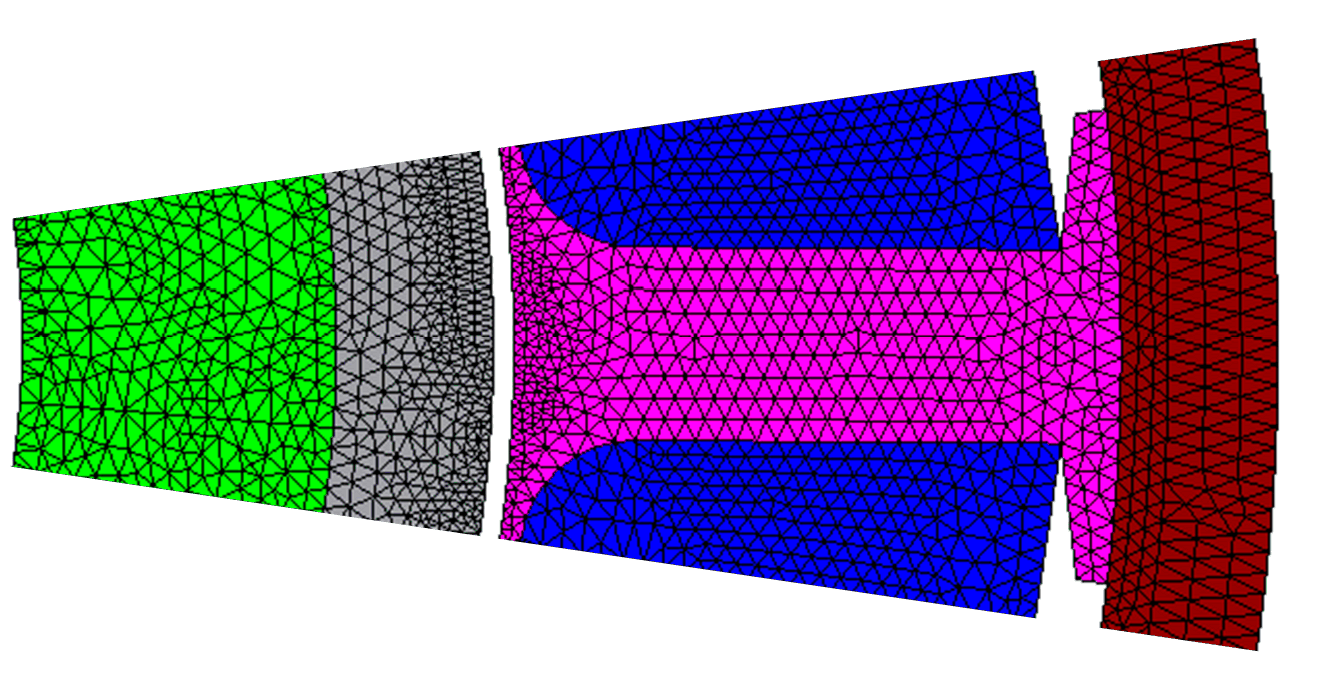
4.1. Finite Element Model
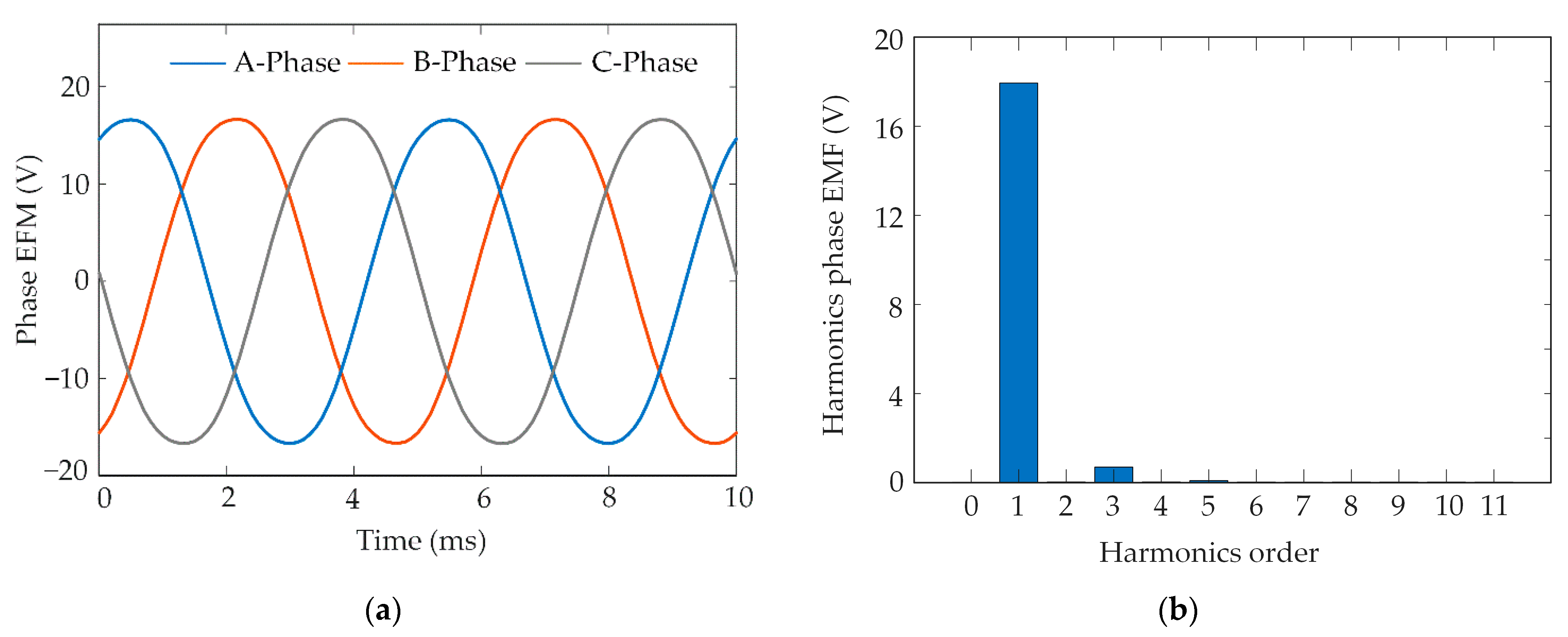
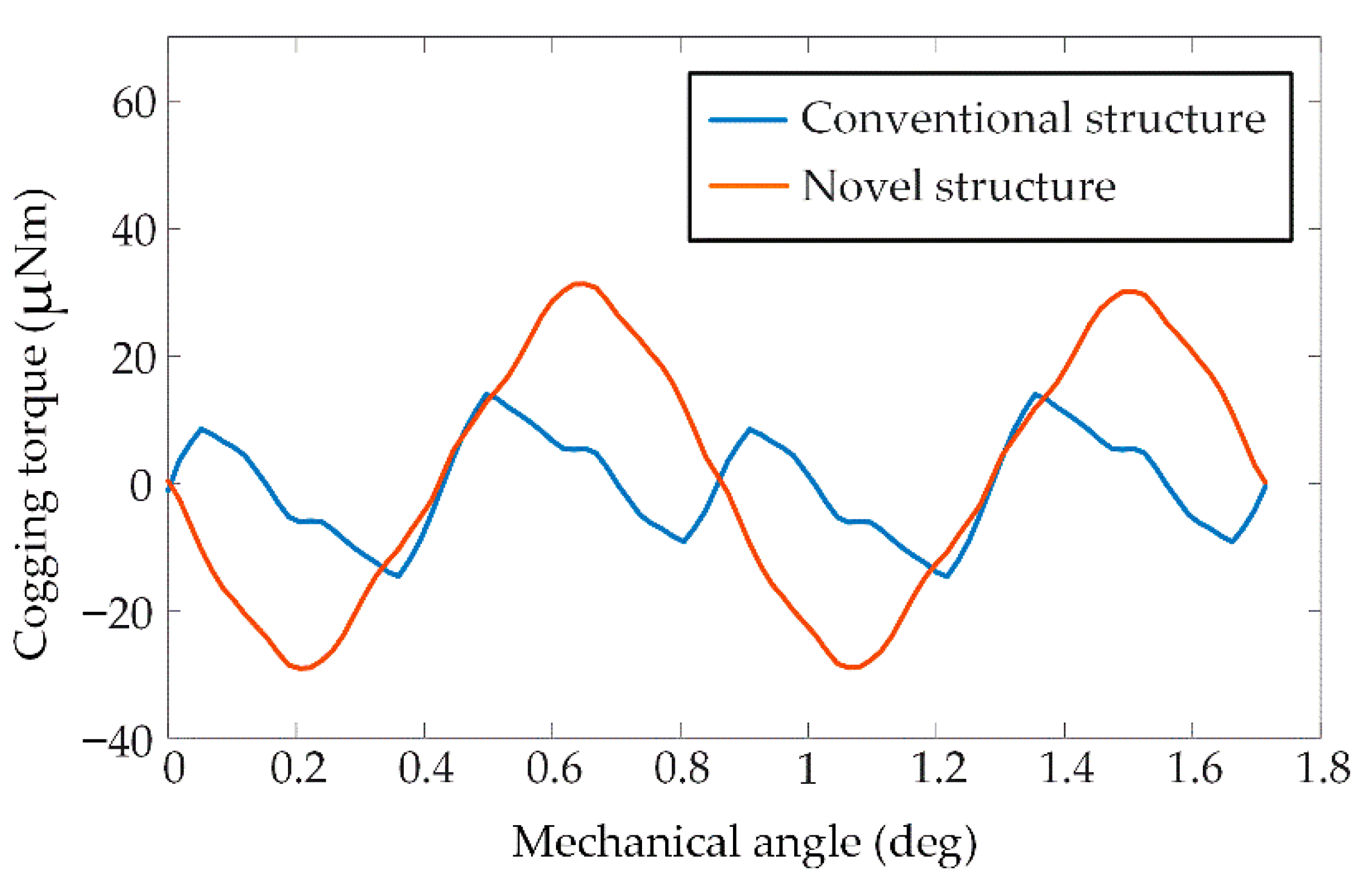
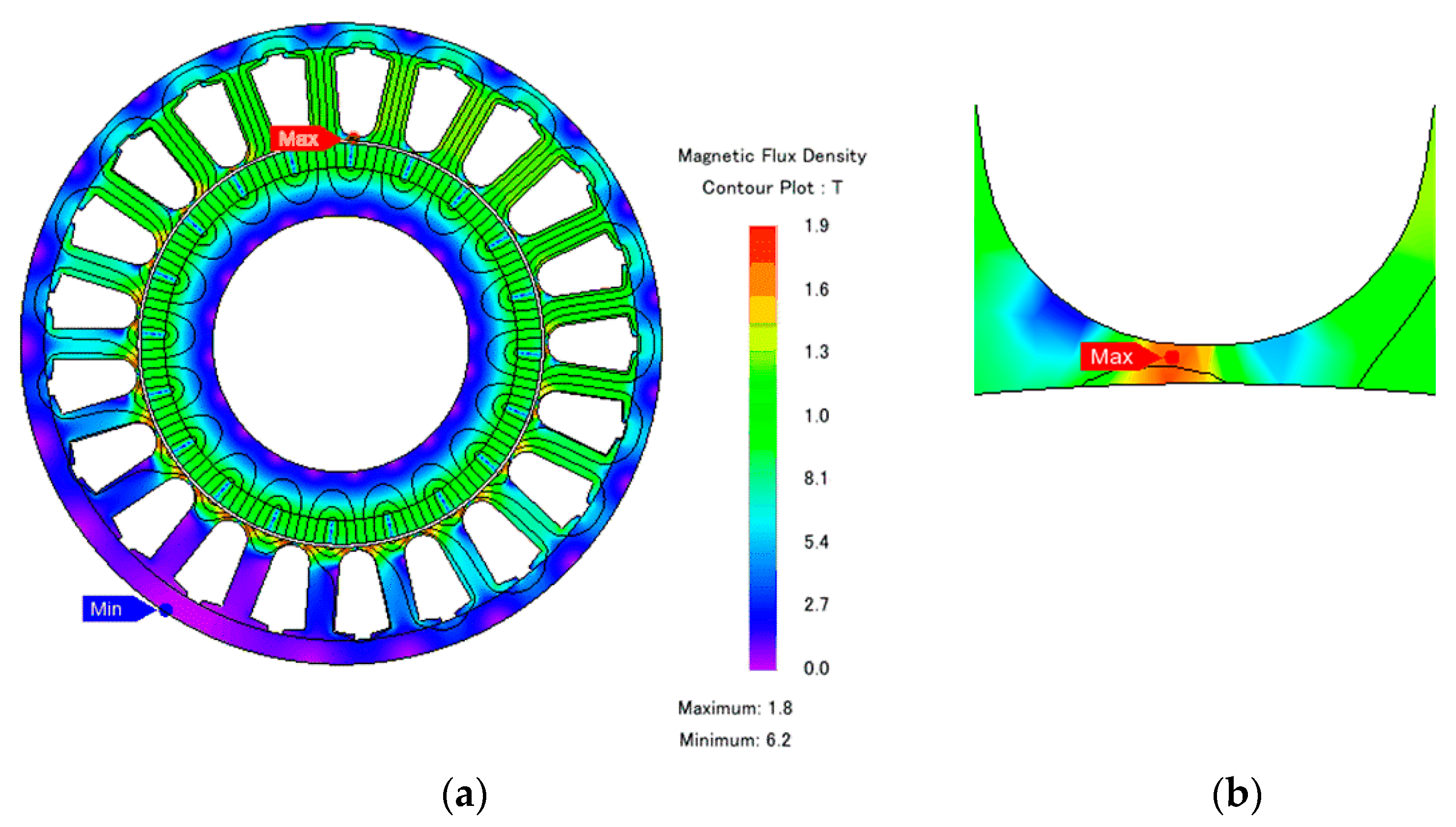
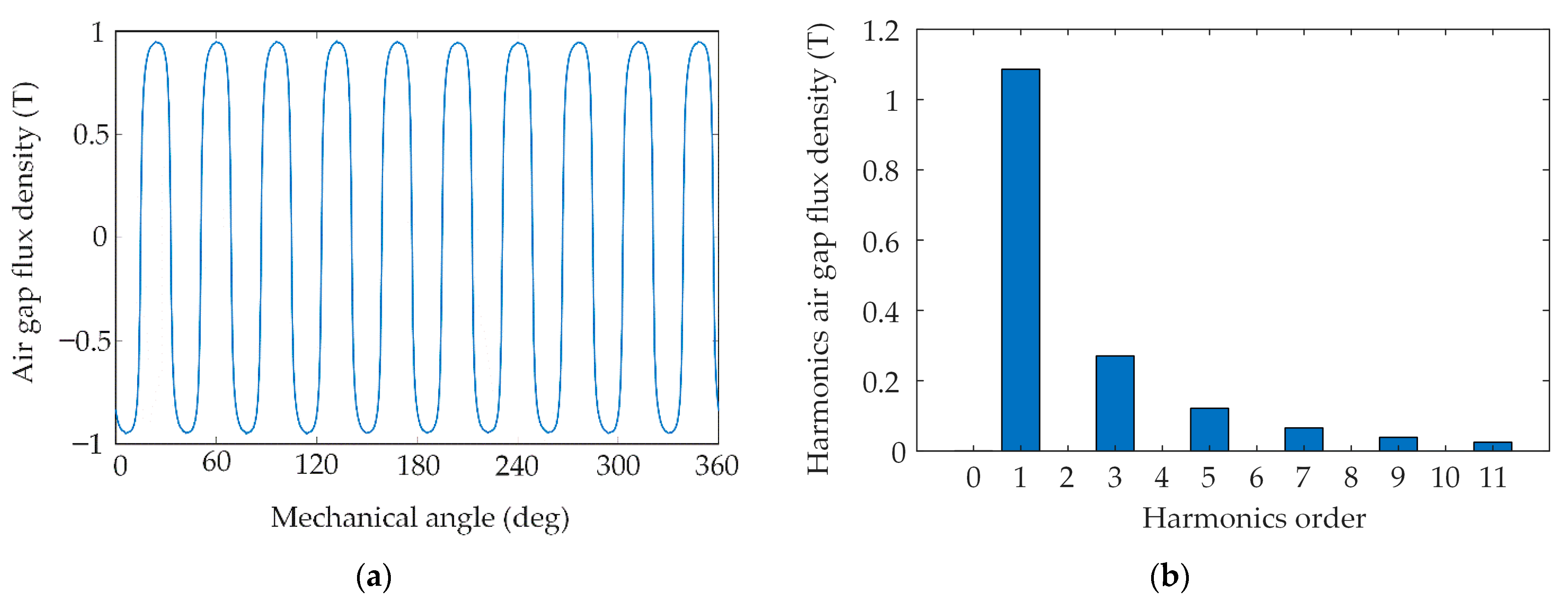
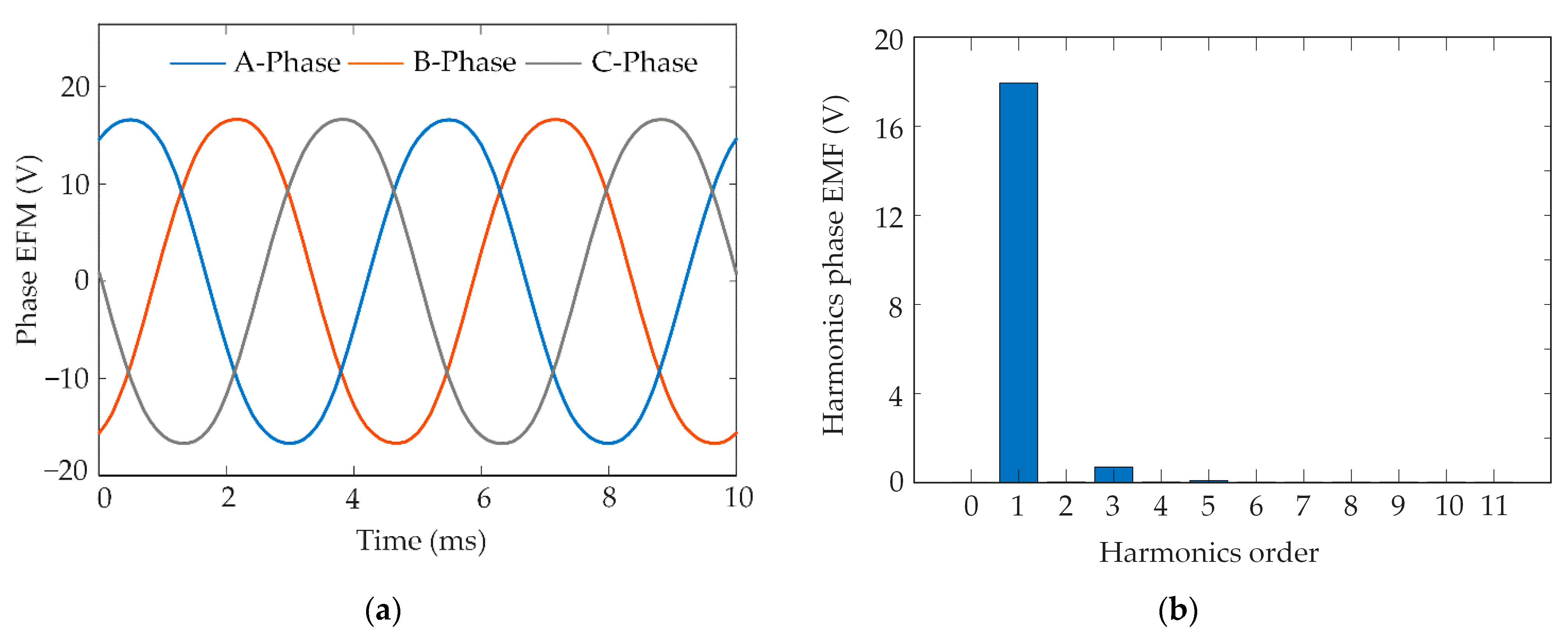
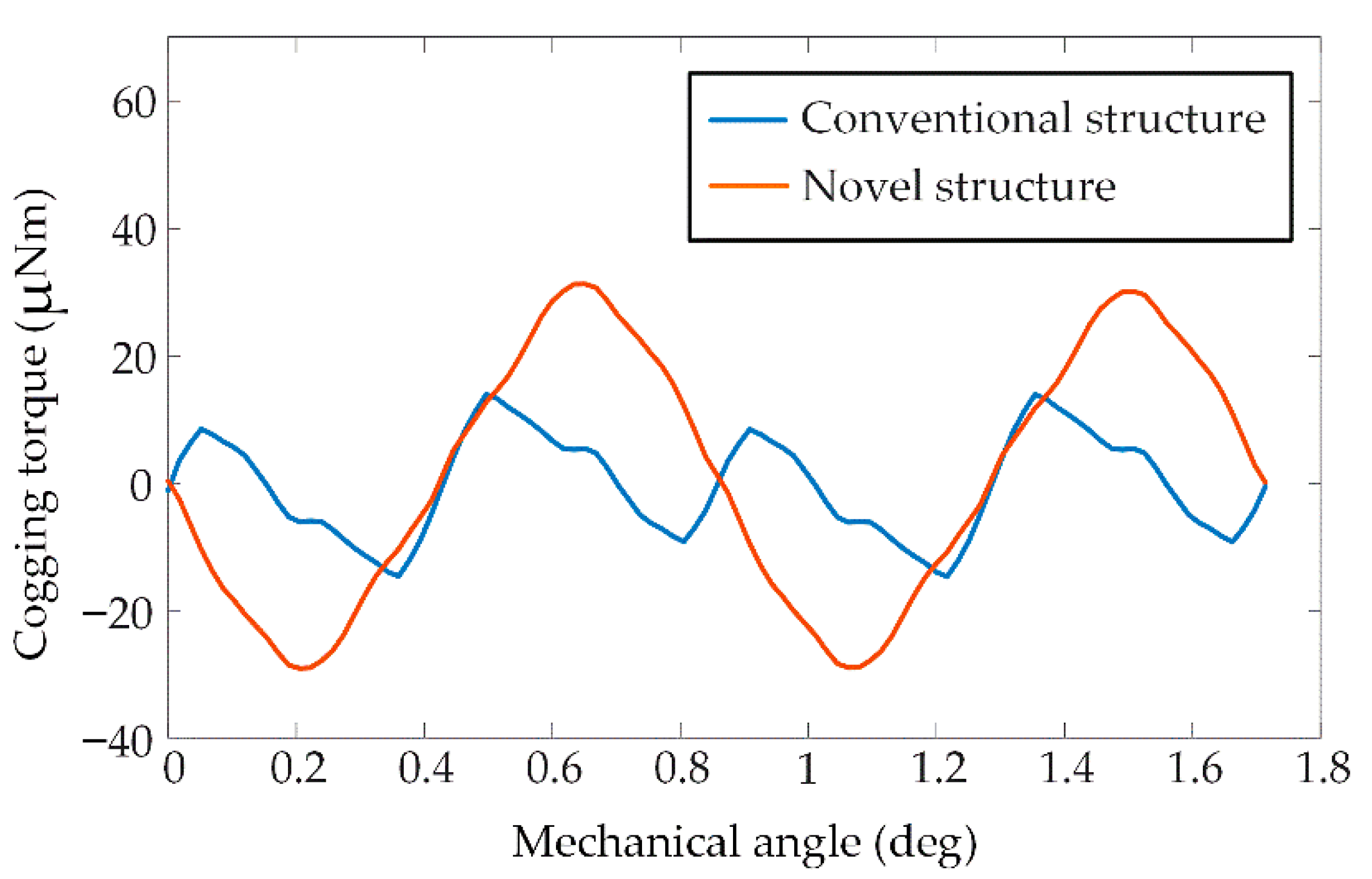
4.2. Electromagnetic Characteristic
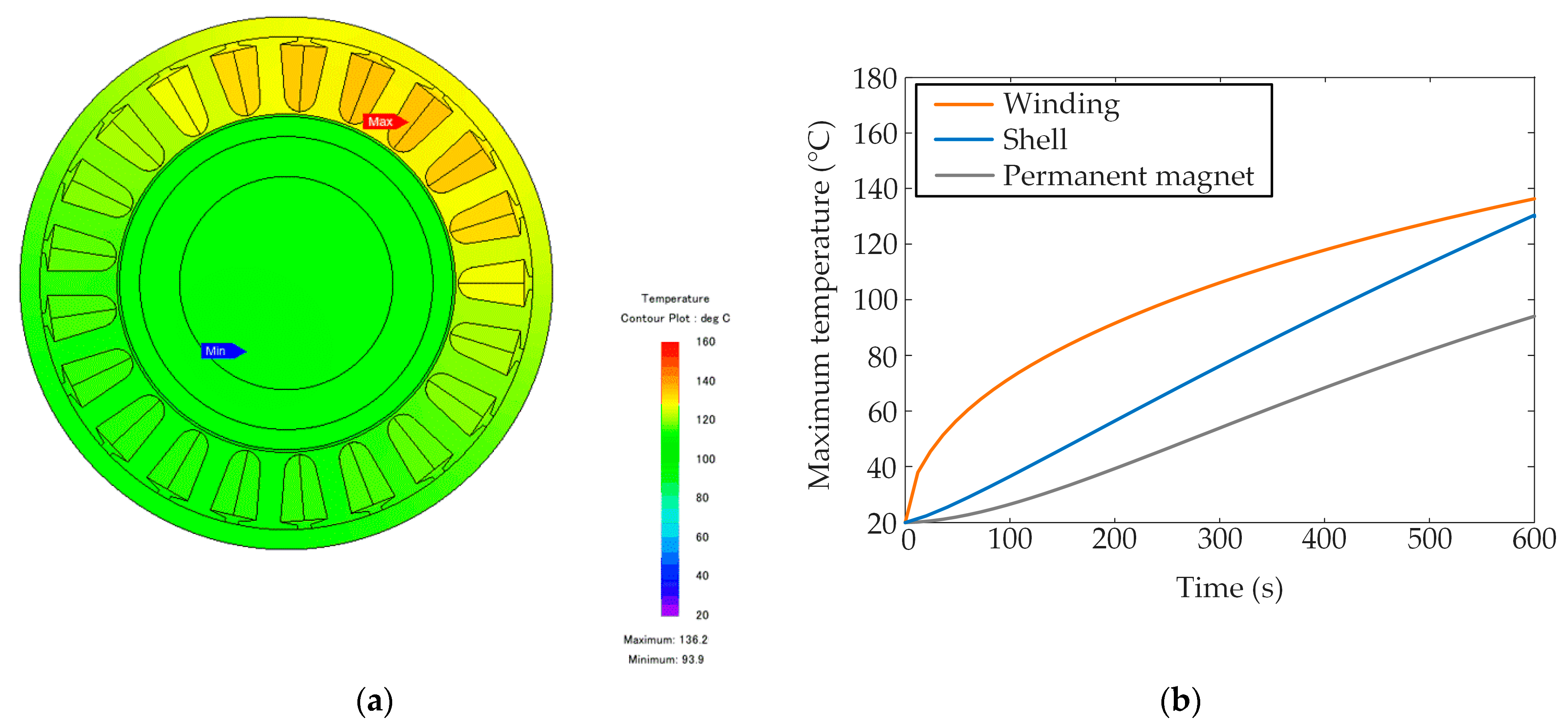
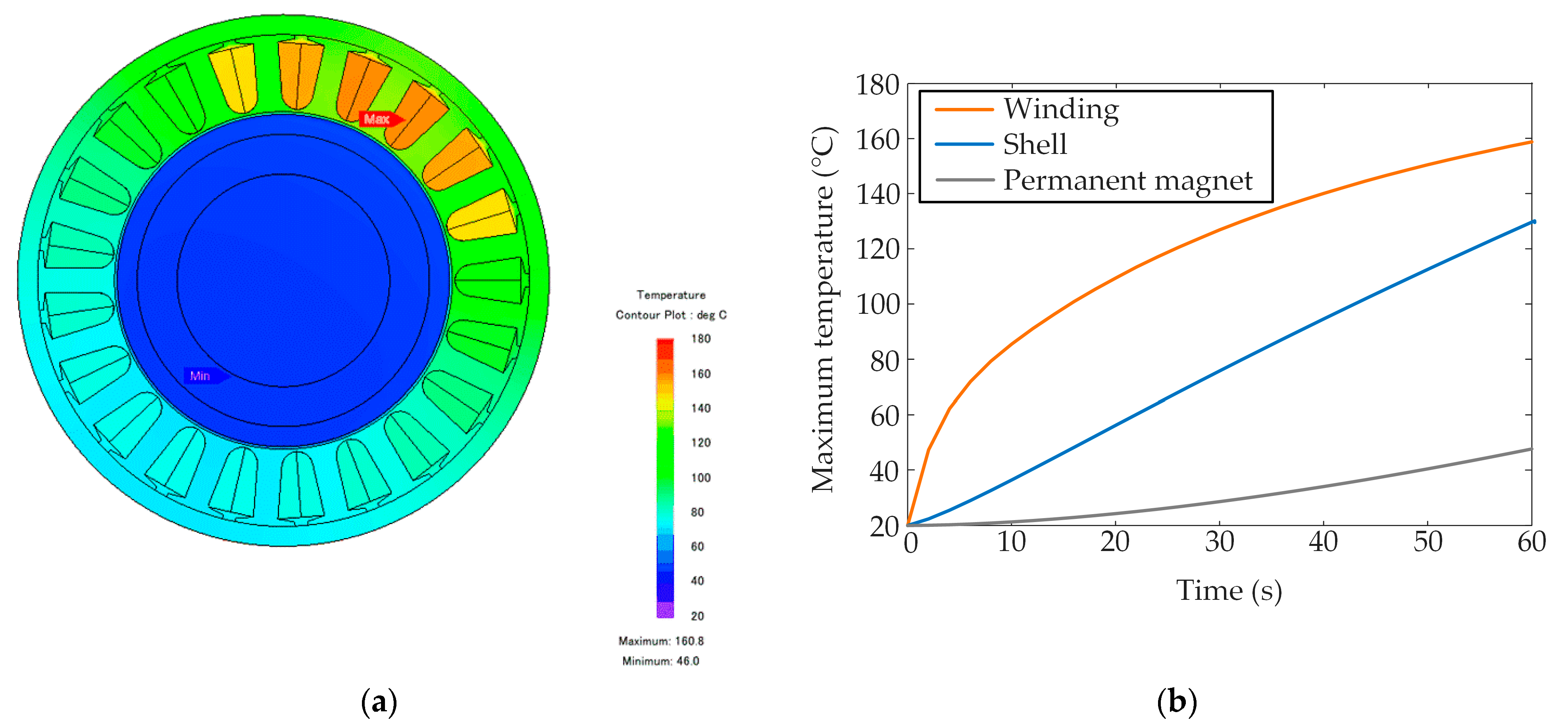
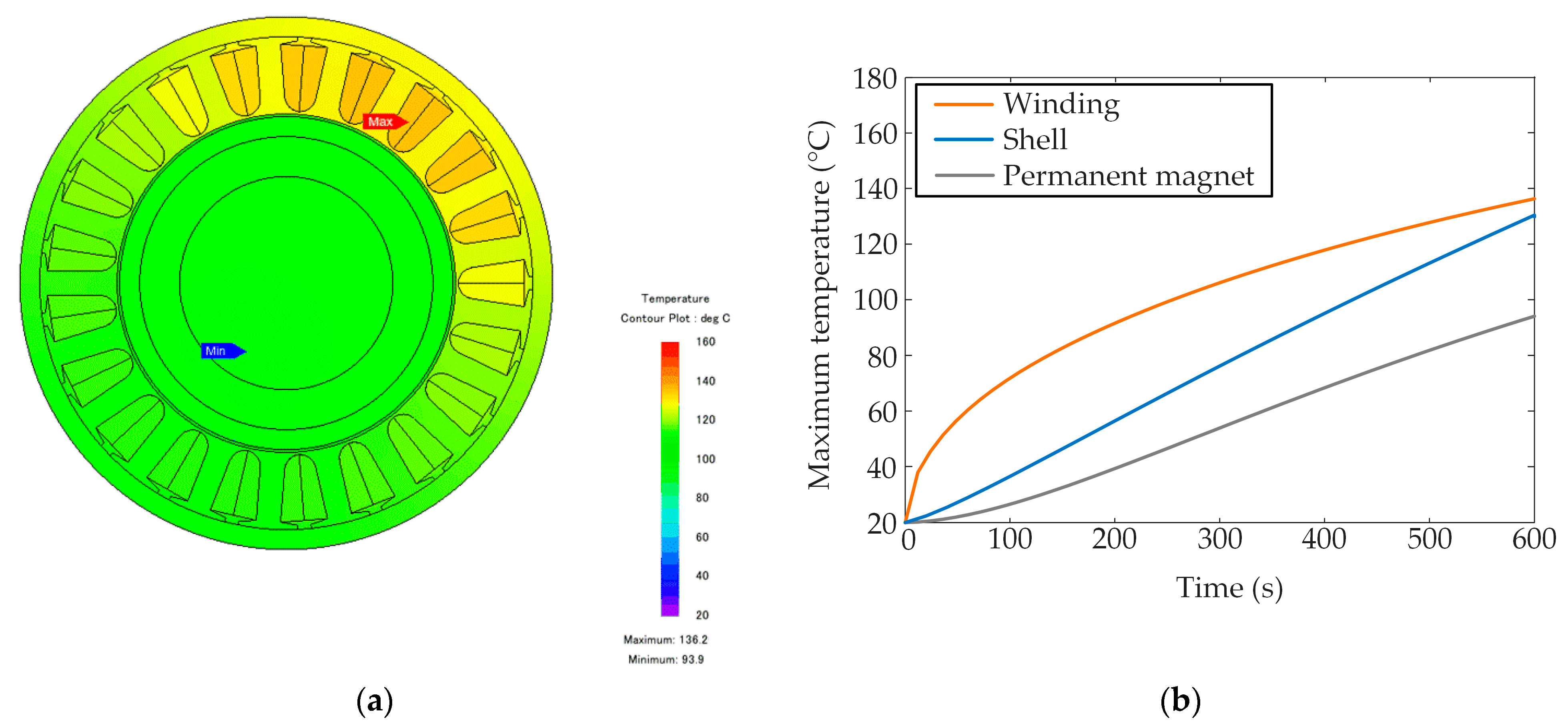
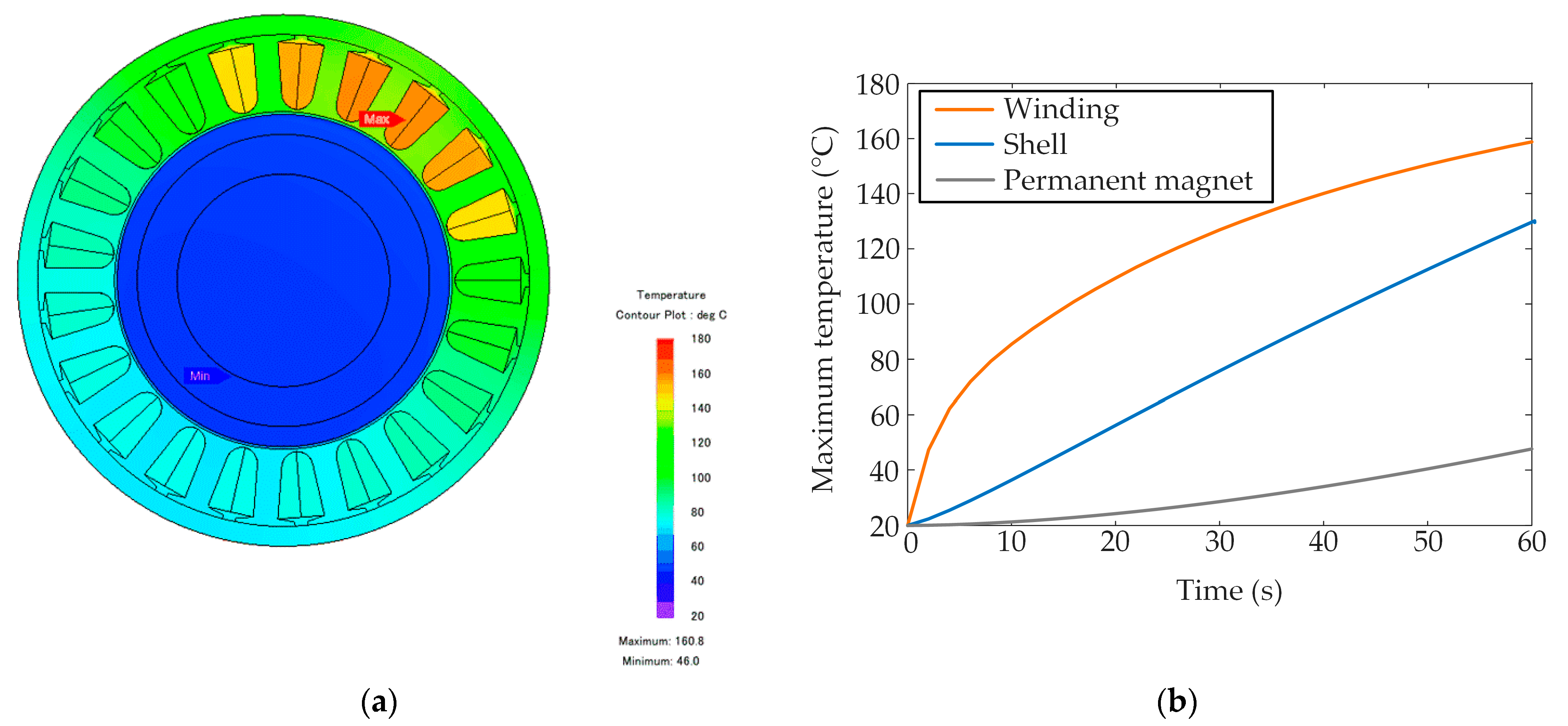
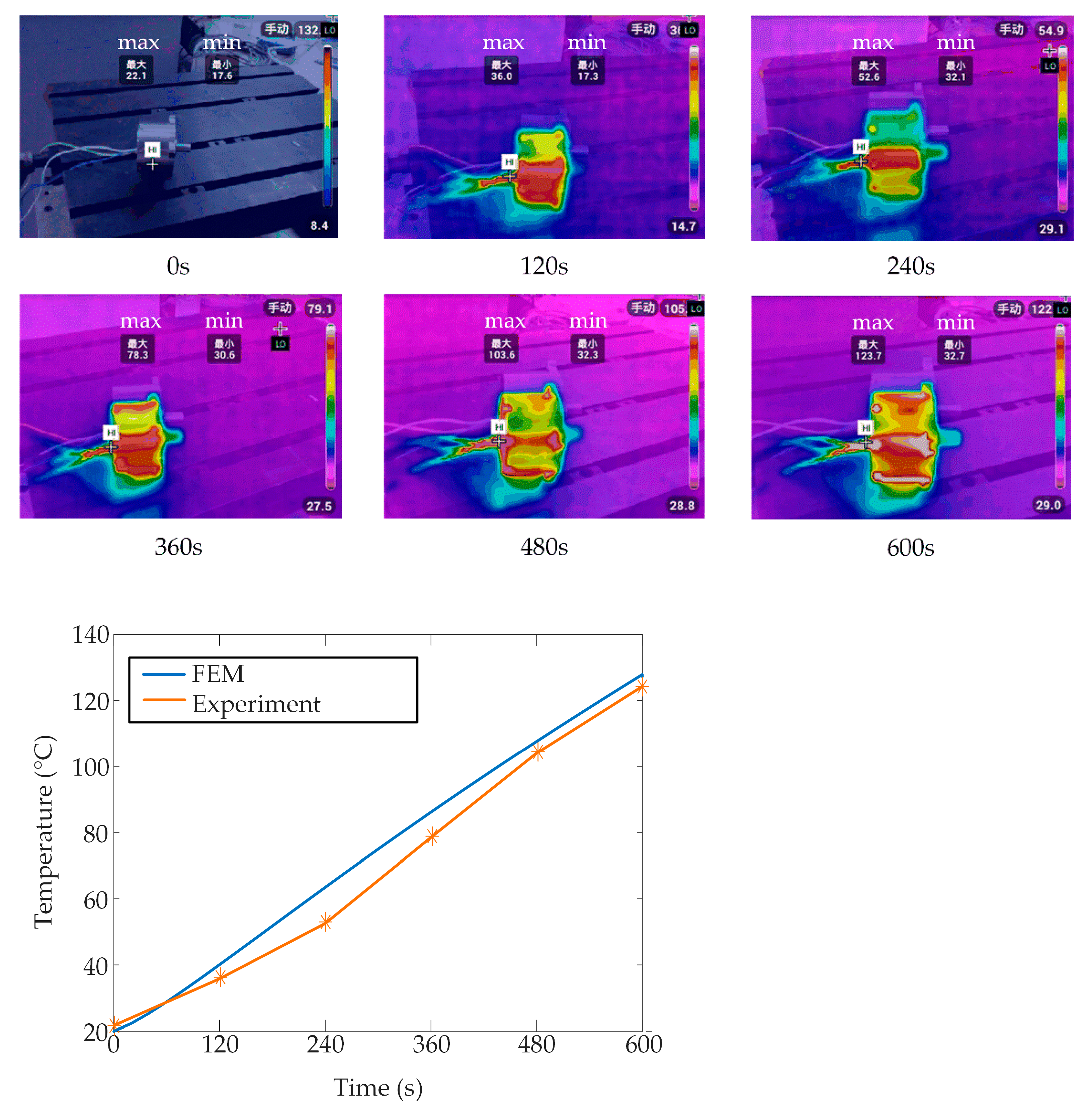
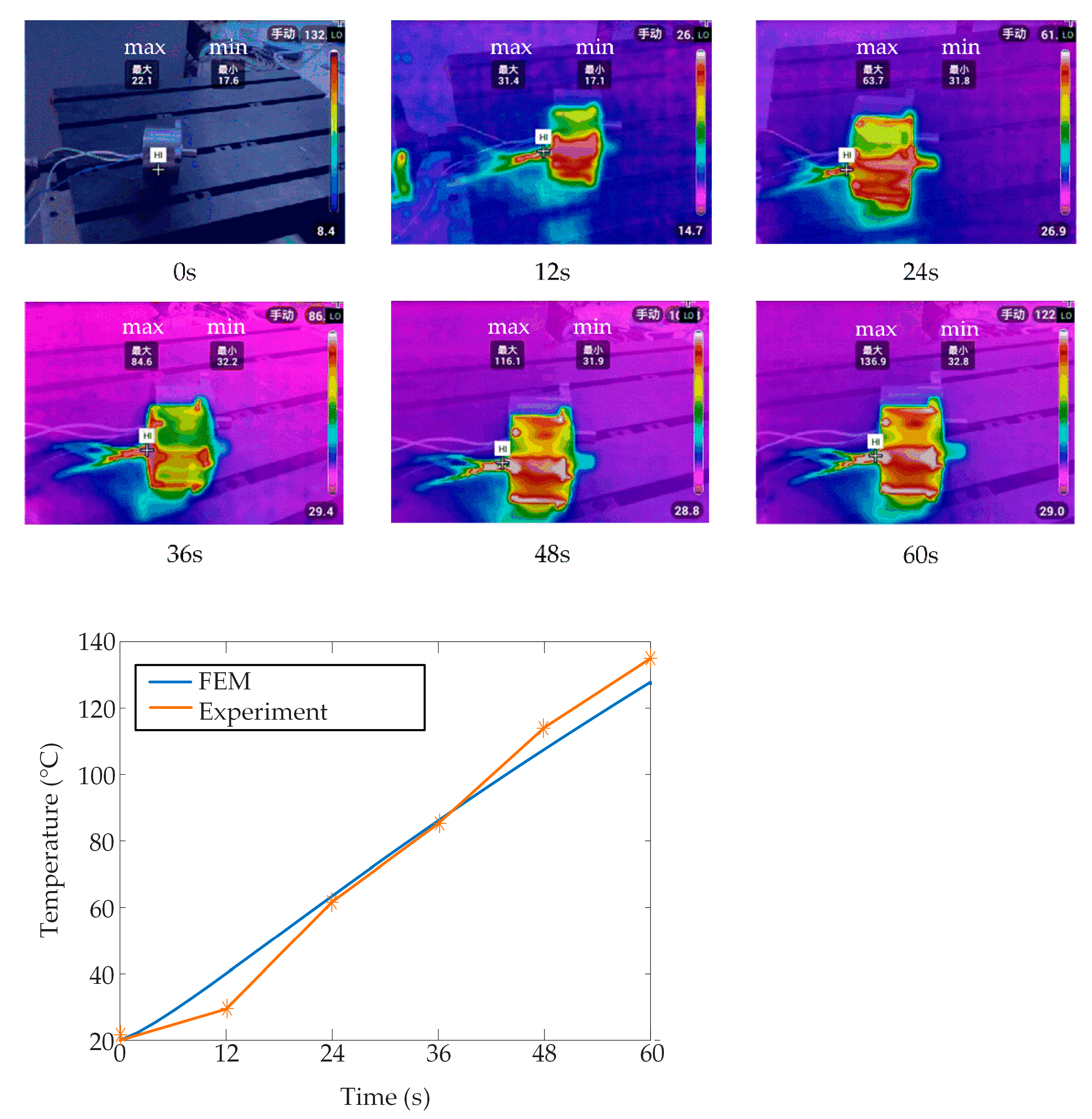
4.3. Temperature Distribution
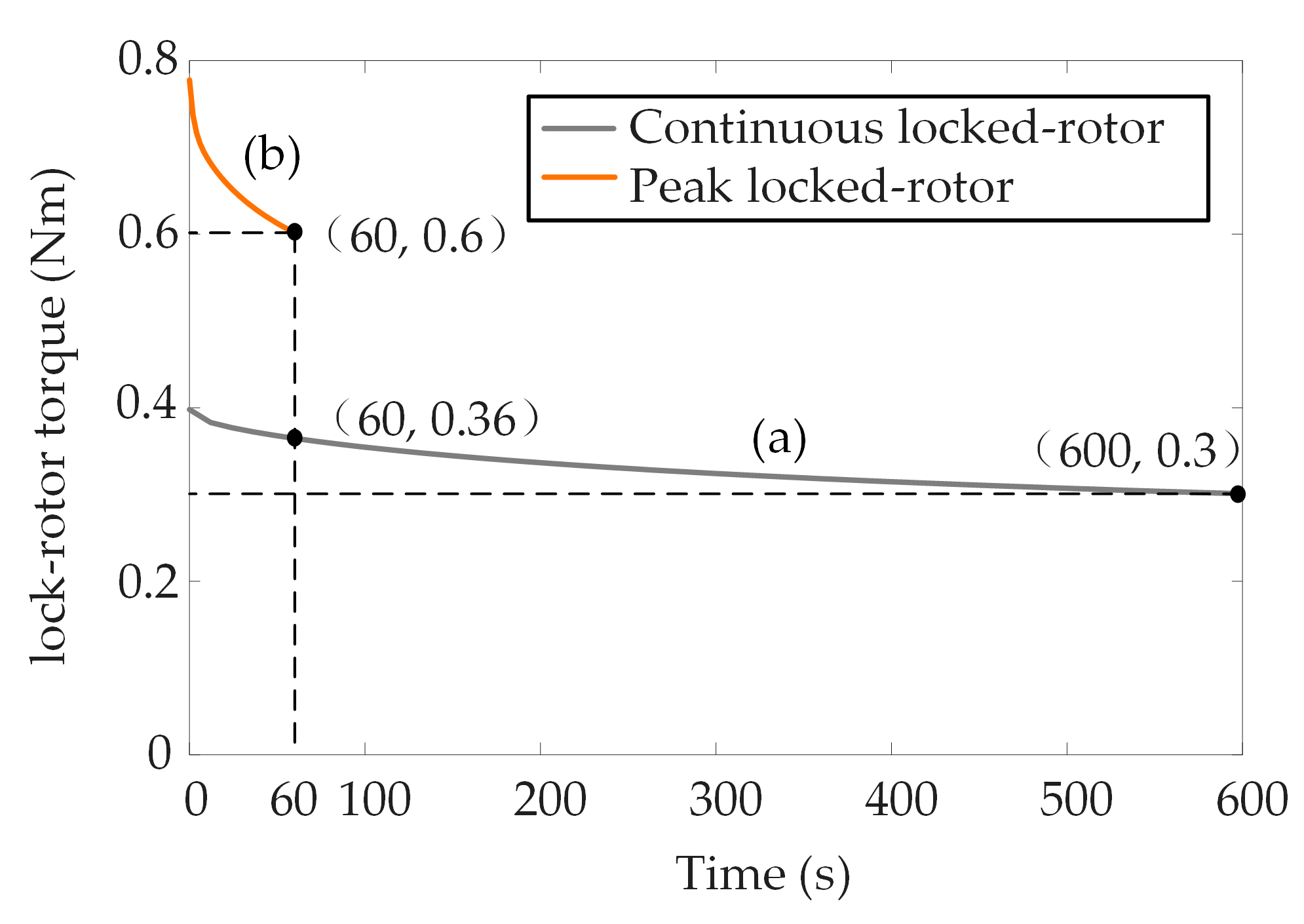
4.4. Impact of Temperature on Torque
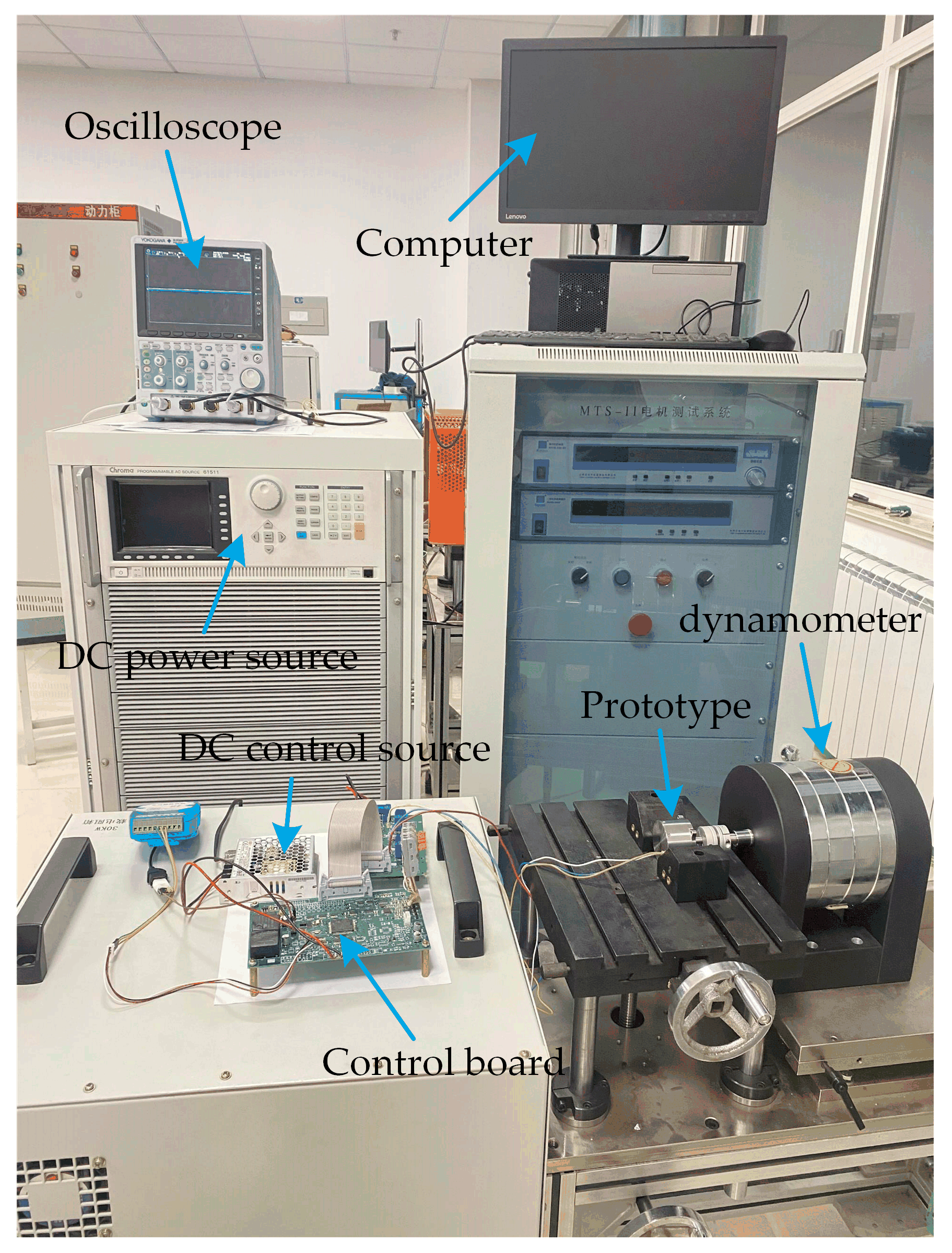
5. Prototype Motor and Experiments
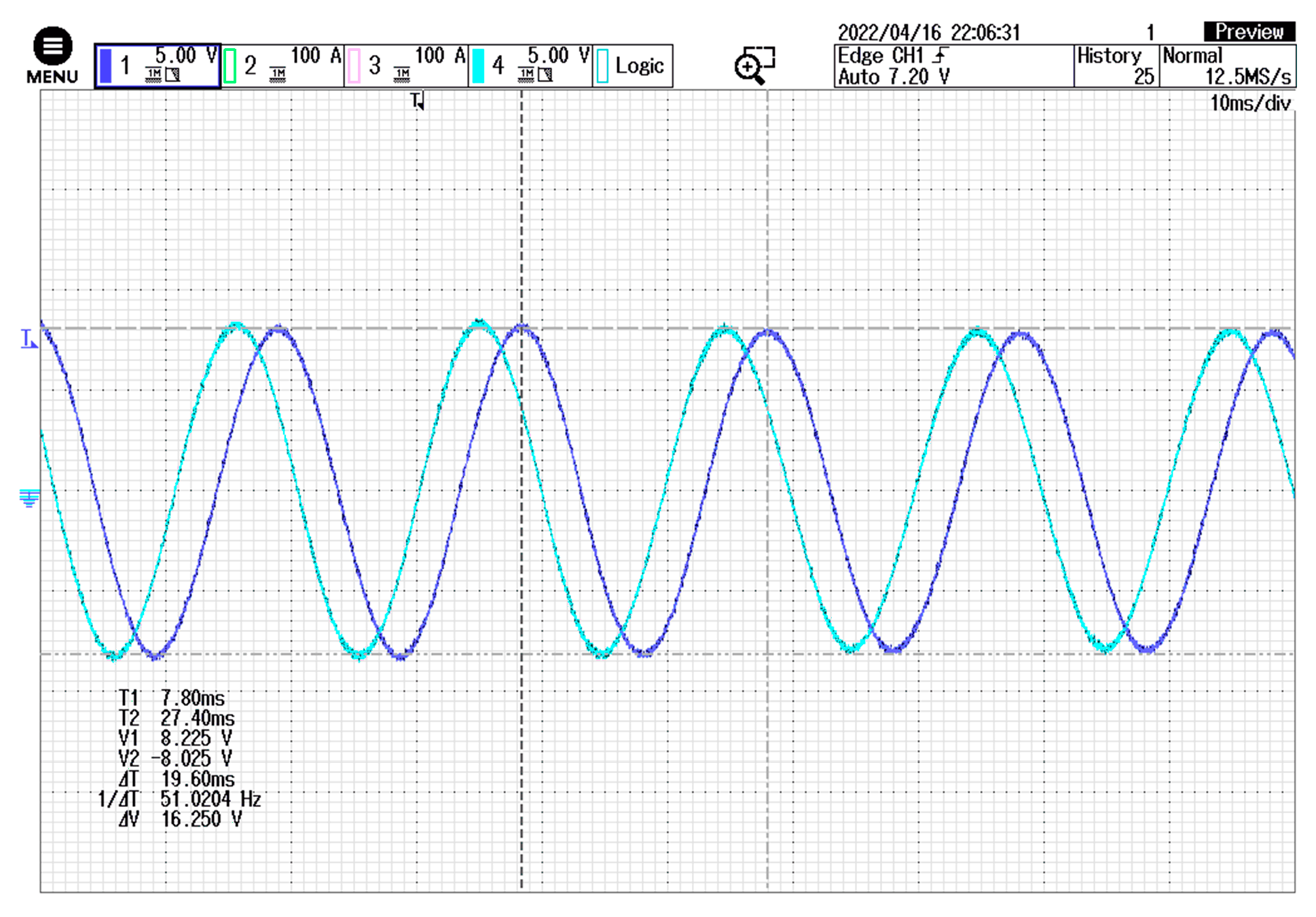
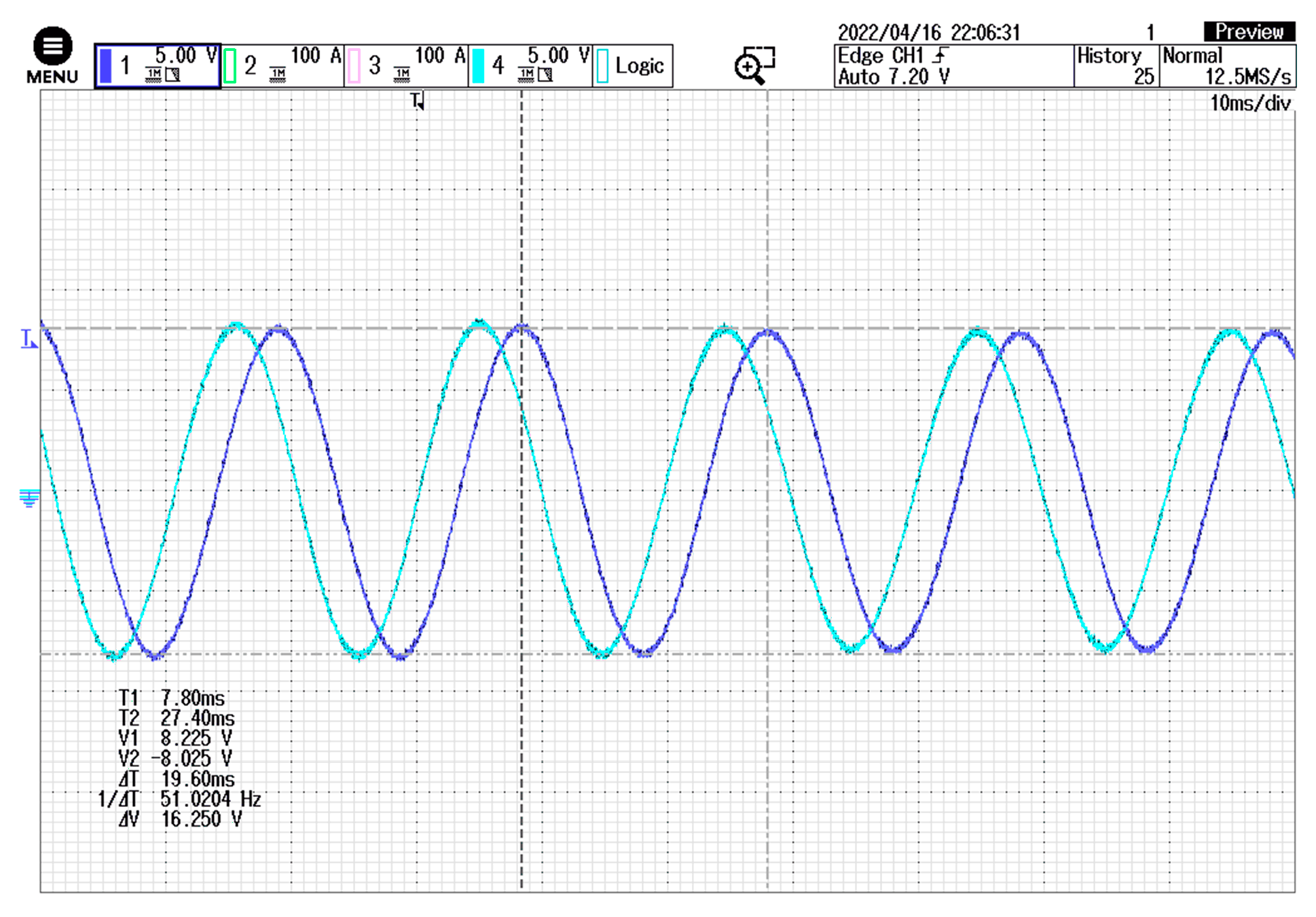
5.1. No-Load Experiment
5.2. Temperature Experiment
6. Discussion
Author Contributions
Funding
Conflicts of Interest
References
- Onsal, M.; Cumhur, B.; Demir, Y.; Yolacan, E. Rotor design optimization of a new flux-assisted consequent pole spoke-type permanent magnet torque motor for low-speed applications. IEEE Trans. Magn. 2018, 54, 8206005. [Google Scholar] [CrossRef]
- Jo, I.H.; Lee, J.; Lee, H.W.; Lee, J.B.; Lim, J.H.; Kim, S.H.; Park, C.B. A Study on MG-PMSM for High Torque Density of 45 kW–Class Tram Driving System. Energies 2022, 15, 1749. [Google Scholar] [CrossRef]
- Gao, C.; Gao, M.; Si, J.; Hu, Y.; Gan, C. A novel direct-drive permanent magnet synchronous motor with toroidal windings. Energies 2019, 12, 432. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Z.; Yu, S.; Zhang, F.; Jin, S.; Wang, X. Electromagnetic and Structural Design of a Novel Low-Speed High-Torque Motor with Dual-Stator and PM-Reluctance Rotor. IEEE Trans. Appl. Supercon. 2020, 30, 5203605. [Google Scholar] [CrossRef]
- Bacco, G.; Bianchi, N.; Luise, F. High-torque low-speed permanent magnet assisted synchronous reluctance motor design. In Proceedings of the 2019 IEEE International Electric Machines and Drives Conference (IEMDC), San Diego, CA, USA, 12–15 May 2019; pp. 644–649. [Google Scholar]
- Wu, S.; Zhao, X.; Jiao, Z.; Luk, P.C.-K.; Jiu, C. Multi-objective optimal design of a toroidally wound radial-flux Halbach permanent magnet array limited angle torque motor. IEEE Trans. Ind. Electron. 2016, 64, 2962–2971. [Google Scholar] [CrossRef] [Green Version]
- Chai, W.; Lipo, T.A.; Kwon, B.I. Design and optimization of a novel wound field synchronous machine for torque performance enhancement. Energies 2018, 11, 2111. [Google Scholar] [CrossRef] [Green Version]
- Chu, W.Q.; Zhu, Z.Q. Reduction of on-load torque ripples in permanent magnet synchronous machines by improved skewing. IEEE Trans. Magn. 2013, 49, 3822–3825. [Google Scholar] [CrossRef]
- Zhao, W.; Lipo, T.A.; Kwon, B.I. Torque pulsation minimization in spoke-type interior permanent magnet motors with skewing and sinusoidal permanent magnet configurations. IEEE Trans. Magn. 2015, 51, 8110804. [Google Scholar] [CrossRef]
- Zhu, Z.Q.; Howe, D. Influence of design parameters on cogging torque in permanent magnet machines. IEEE Trans. Energy Convers. 2000, 15, 407–412. [Google Scholar] [CrossRef] [Green Version]
- Demir, Y.; Aydin, M. A novel dual three-phase permanent magnet synchronous motor with asymmetric stator winding. IEEE Trans. Magn. 2016, 52, 8105005. [Google Scholar] [CrossRef]
- Chen, N.; Ho, S.L.; Fu, W.N. Optimization of permanent magnet surface shapes of electric motors for minimization of cogging torque using FEM. IEEE Trans. Magn. 2010, 46, 2478–2481. [Google Scholar] [CrossRef]
- Vicente, S.-S.; Auxiliadora, S.-G.; Manuel, B.-P.; José-Ramón, C.-B. Optimisation of Magnet Shape for Cogging Torque Reduction in Axial-Flux Permanent-Magnet Motors. IEEE Trans. Energy Convers. 2021, 36, 2825–2838. [Google Scholar]
- Yu, H.; Yu, G.; Xu, Y.; Zou, J. Torque performance improvement for slotted limited-angle torque motors by combined SMA application and GA optimization. IEEE Trans. Magn. 2020, 57, 8200305. [Google Scholar] [CrossRef]
- Zhang, J.; Zhang, B.; Feng, G.; Gan, B. Design and Analysis of a Low-Speed and High-Torque Dual-Stator Permanent Magnet Motor With Inner Enhanced Torque. IEEE Access 2020, 8, 182984–182995. [Google Scholar] [CrossRef]
- Ma, P.; Wang, Q.; Li, Y.; Jiang, S.; Zhao, M. Research on Torque Ripple Suppression of the Slotted Limited Angle Torque Motor. IEEE Trans. Magn. 2020, 57, 8200106. [Google Scholar] [CrossRef]
- Zou, J.B.; Yu, G.D.; Xu, Y.X.; Li, J.L.; Wang, Q. Design and analysis of a permanent magnet slotted limited-angle torque motor with special tooth-tip structure for torque performance improvement. In Proceedings of the 2015 IEEE International Conference on Applied Superconductivity and Electromagnetic Devices (ASEMD), Shanghai, China, 20–23 November 2015; pp. 246–247. [Google Scholar]
- Kim, M.; Cho, S.; Lee, K.; Lee, J.; Han, J.; Jeong, T.; Kim, W.; Koo, D.; Lee, J. Torque density elevation in concentrated winding interior PM synchronous motor with minimized magnet volume. IEEE Trans. Magn. 2013, 49, 3334–3337. [Google Scholar] [CrossRef]
- Chai, J.; Zhao, T.; Gui, X. Multi-Objective Optimization Design of Permanent Magnet Torque Motor. World Electr. Veh. J. 2021, 12, 131. [Google Scholar] [CrossRef]
- Chung, S.U.; Kim, J.W.; Chun, Y.D.; Woo, B.C.; Hong, D.K. Fractional slot concentrated winding PMSM with consequent pole rotor for a low-speed direct drive: Reduction of rare earth permanent magnet. IEEE Trans. Energy Convers. 2015, 30, 103–109. [Google Scholar] [CrossRef]
- Li, Y.; Zhu, Z.Q.; Li, G.J. Influence of stator topologies on average torque and torque ripple of fractional-slot SPM machines with fully closed slots. IEEE Trans. Ind. Appl. 2018, 54, 2151–2164. [Google Scholar] [CrossRef]
- Hu, Y.; Zhu, S.; Xu, L.; Jiang, B. Reduction of Torque Ripple and Rotor Eddy Current Losses by Closed Slots Design in a High-speed PMSM for EHA Applications. IEEE Trans. Magn. 2022, 58, 8102206. [Google Scholar] [CrossRef]
- Chen, H.; Qu, R.; Li, J.; Li, D. Demagnetization performance of a 7 MW interior permanent magnet wind generator with fractional-slot concentrated windings. IEEE Trans. Magn. 2015, 51, 2442263. [Google Scholar] [CrossRef]
- De Donato, G.; Capponi, F.G.; Rivellini, G.A.; Caricchi, F. Integral-slot versus fractional-slot concentrated-winding axial-flux permanent-magnet machines: Comparative design, FEA, and experimental tests. IEEE Trans. Ind. Appl. 2012, 48, 1487–1495. [Google Scholar] [CrossRef]
- Jia, G.X.; Zhao, H.C.; Shao, H.J. Simulation research on PMSM vector control system based on SVPWM. In Proceedings of the 2010 International Conference on Electrical and Control Engineering, Wuhan, China, 25–27 June 2010; pp. 1936–1940. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Maximum stack length | 25 mm |
| Shell outer diameter | 40 mm |
| Number of pole pairs | 10 |
| Number of slots | 21 |
| Maximum no-load speed | 1200 rpm |
| Continuous locked-rotor voltage | 14 V |
| Peak locked-rotor voltage | 28 V |
| Continuous locked-rotor torque | 0.3 Nm |
| Peak locked-rotor torque | 0.6 Nm |
| Slot space factor | 0.3 |
| Maximum working temperature | 180 °C |
| Initial temperature | 20 °C |
| Parameters | Value | Unit |
|---|---|---|
| Stack length | 18 | mm |
| Shell outer diameter | 40 | mm |
| Stator outer diameter | 37 | mm |
| Stator inner diameter | 24.6 | mm |
| Rotor outer diameter | 22 | mm |
| Permanent magnet thickness | 2 | mm |
| Air gap length | 0.2 | mm |
| Magnetic barrier thickness | 0.2 | mm |
| Section area of single wire | 0.056 | mm2 |
| Number of series turns per phase | 322 | - |
| Phase resistance | 4.8 | |
| Continuous locked-rotor current | 2 | A |
| Peak locked-rotor current | 4 | A |
| Permanent Magnet | Silicon Steel Sheet | Steel C101 | |||
|---|---|---|---|---|---|
| Density/kg·m−3 | 7400 | Density/kg·m−3 | 7650 | Density/kg·m−3 | 7900 |
| Remanence/T | 1.05 | Thickness/mm | 0.5 | Resistivity/Ωm | 6.098 × 10−7 |
| Coercive force/kA·m−1 | 764 | Saturation flux density/T | 2.2 | Saturation flux density/T | 1.8 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, S.; Zhao, B.; Zhang, C.; Lu, B.; Chu, Y.; Yang, P. Research on a Limit Analytical Method for a Low-Speed Micro Permanent Magnet Torque Motor with Back Winding. Energies 2022, 15, 4662. https://doi.org/10.3390/en15134662
Guo S, Zhao B, Zhang C, Lu B, Chu Y, Yang P. Research on a Limit Analytical Method for a Low-Speed Micro Permanent Magnet Torque Motor with Back Winding. Energies. 2022; 15(13):4662. https://doi.org/10.3390/en15134662
Chicago/Turabian StyleGuo, Shuangshuang, Bo Zhao, Cunshan Zhang, Binglin Lu, Yukang Chu, and Peng Yang. 2022. "Research on a Limit Analytical Method for a Low-Speed Micro Permanent Magnet Torque Motor with Back Winding" Energies 15, no. 13: 4662. https://doi.org/10.3390/en15134662
APA StyleGuo, S., Zhao, B., Zhang, C., Lu, B., Chu, Y., & Yang, P. (2022). Research on a Limit Analytical Method for a Low-Speed Micro Permanent Magnet Torque Motor with Back Winding. Energies, 15(13), 4662. https://doi.org/10.3390/en15134662