
Observer Based Improved Position Estimation in Field-Oriented Controlled PMSM with Misplaced Hall-Effect Sensors


Abstract
:1. Introduction
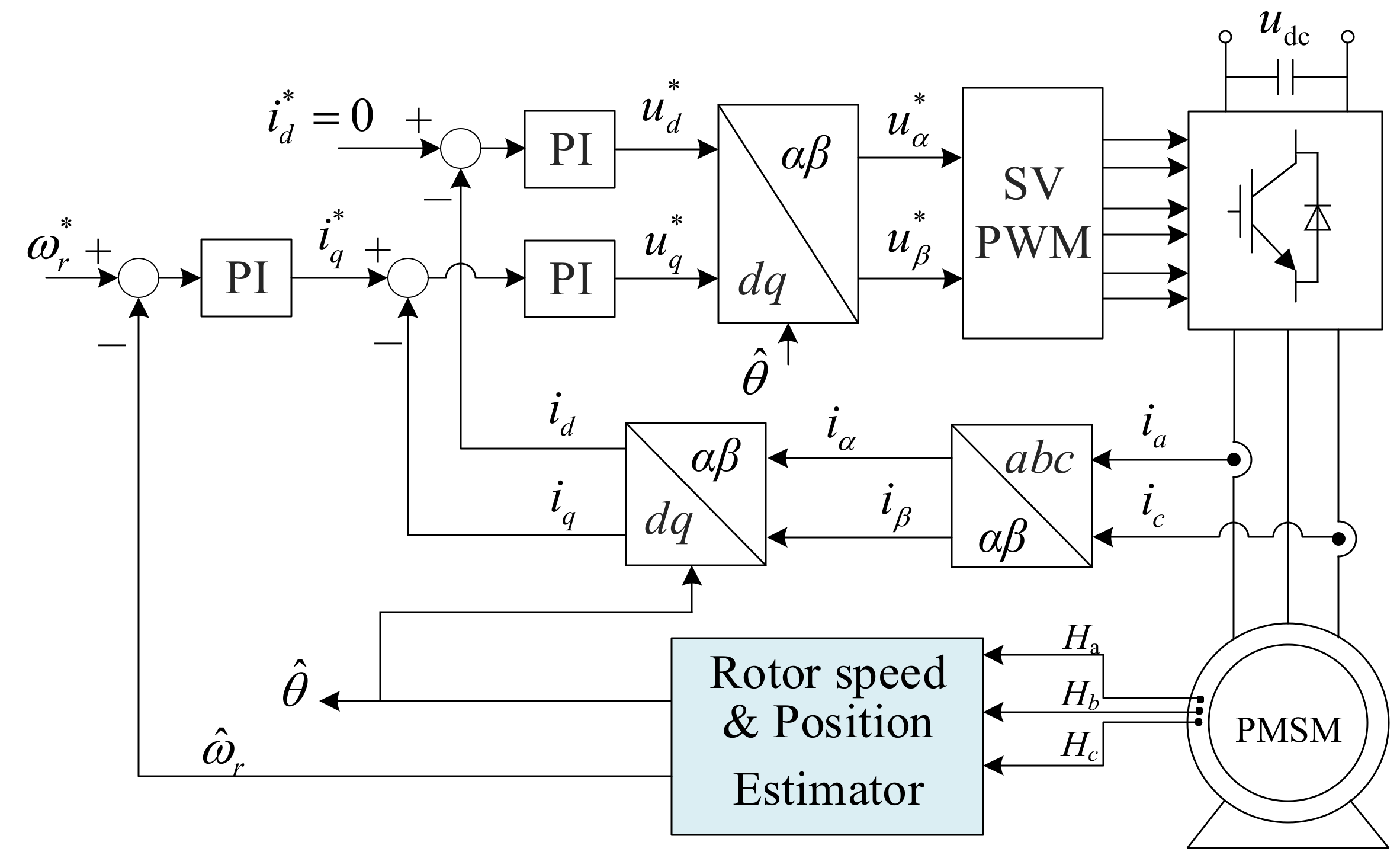
2. Field-Oriented Control of SPMSM Based on Hall-Effect Sensors
3. Conventional Rotor Position Estimation Methods
3.1. Average Speed Method
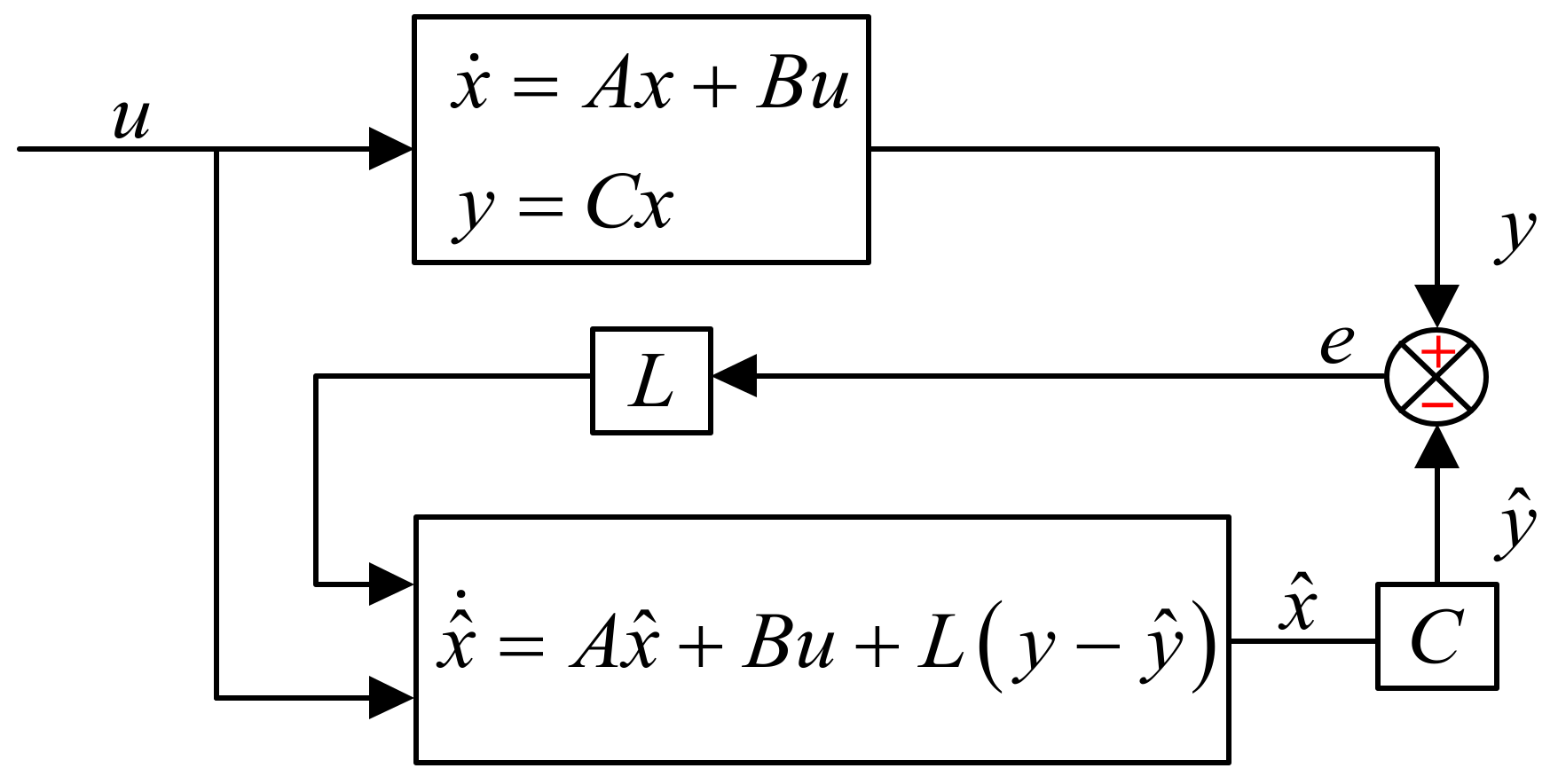
3.2. Luenberger Observer
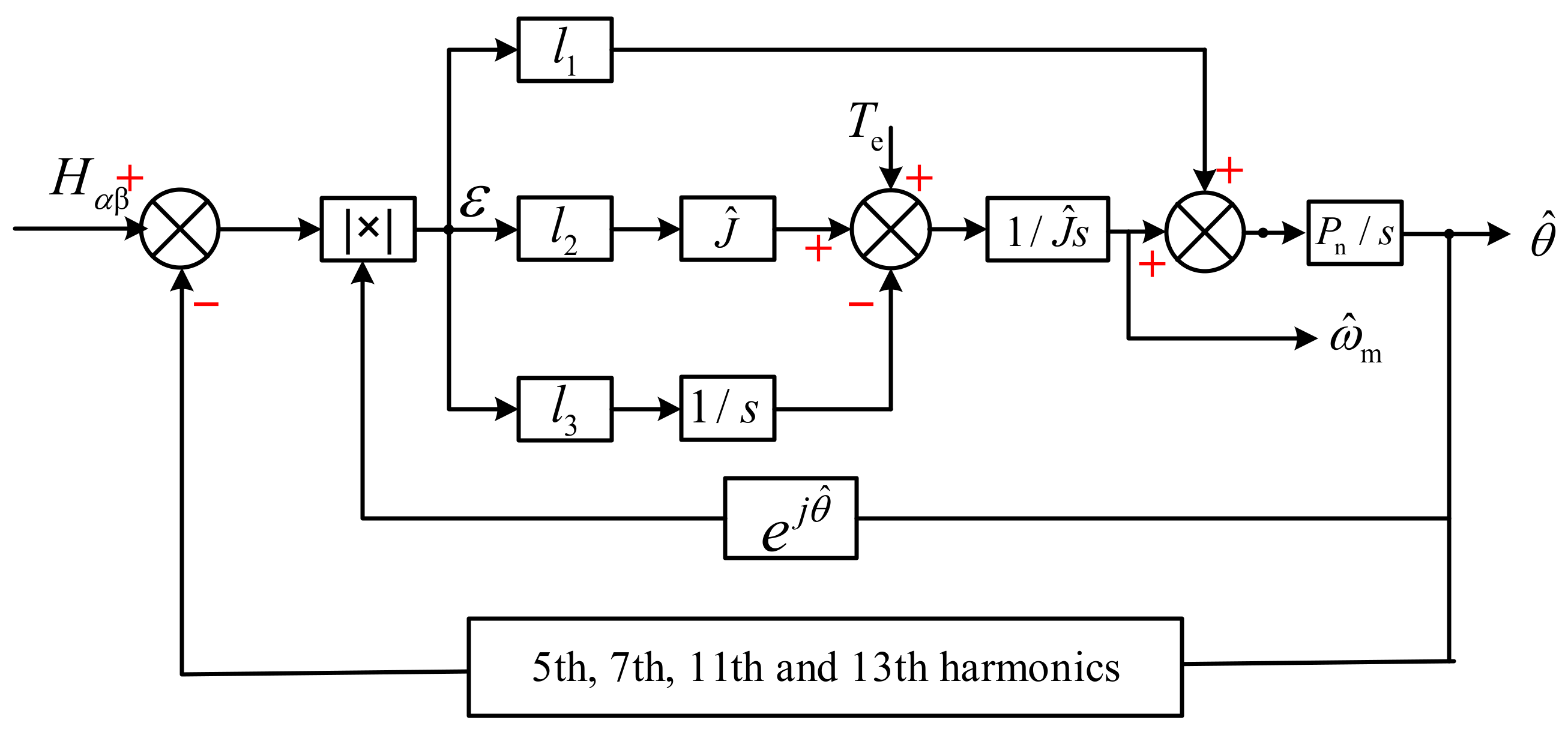
3.3. Luenberger Observer with Feedback Decoupling
4. Improved Dual Observer
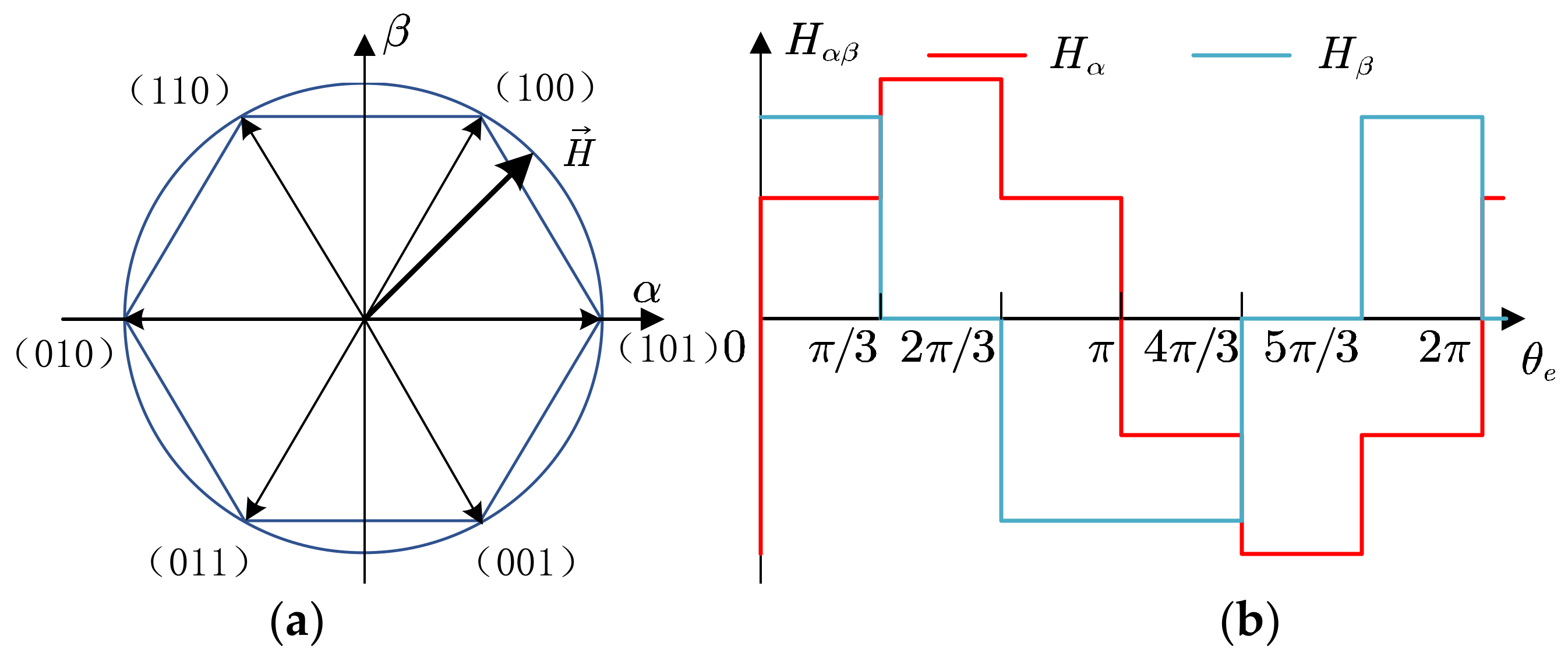
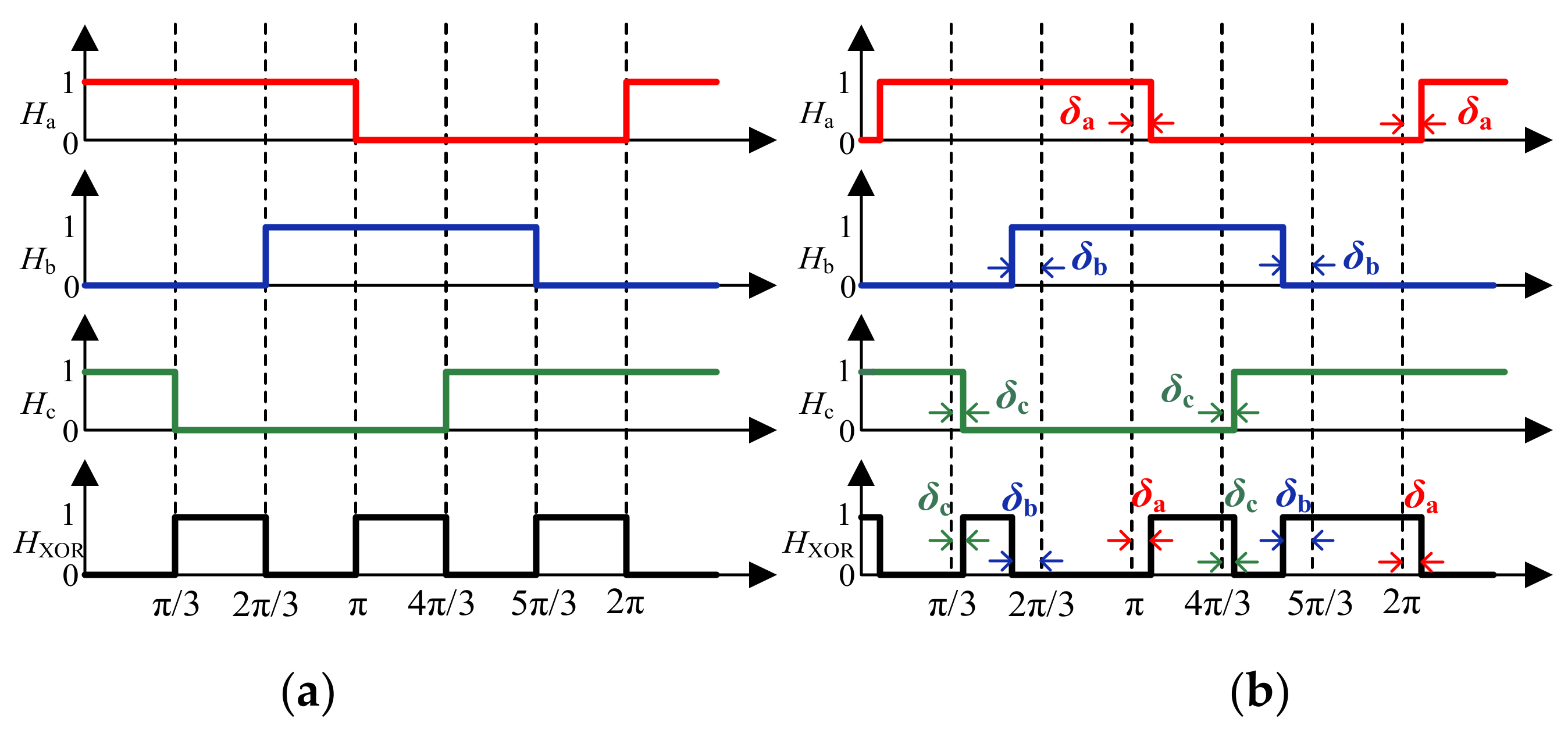
4.1. Misplaced Position Sensors
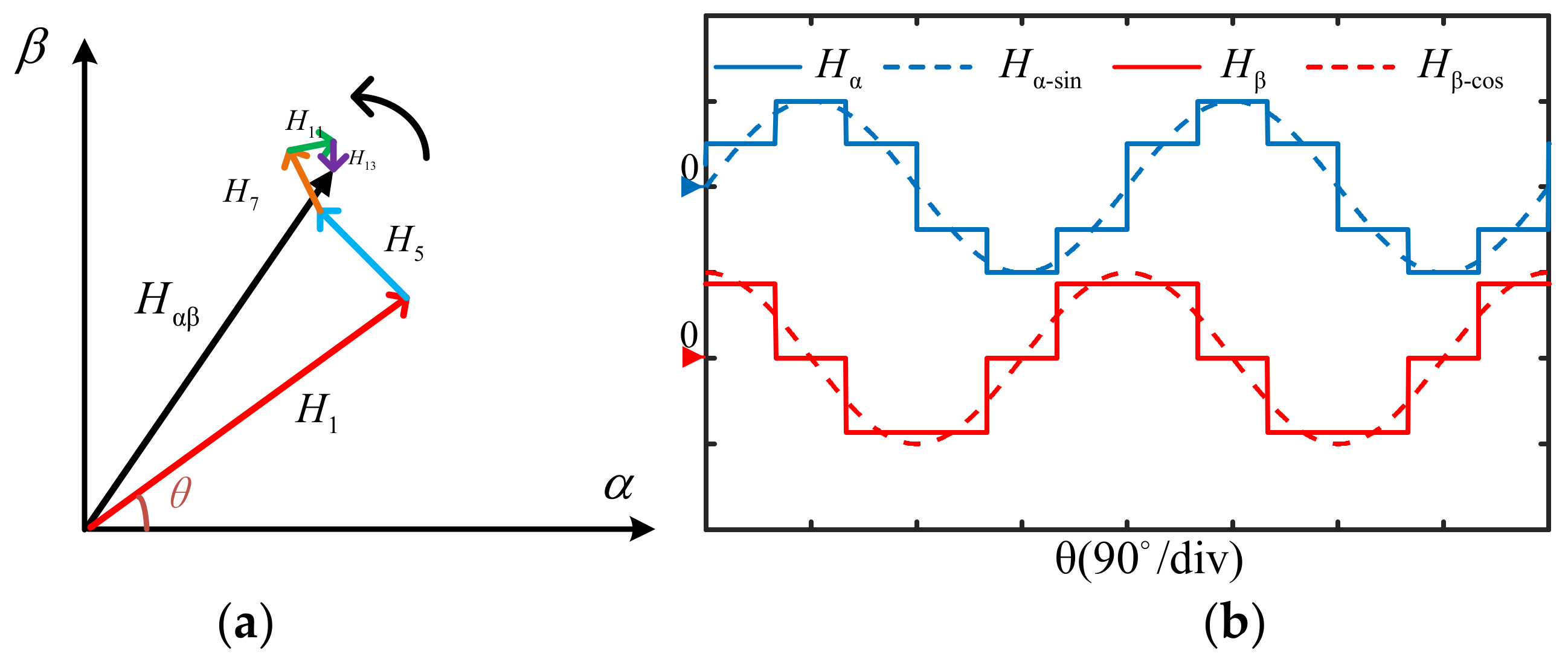
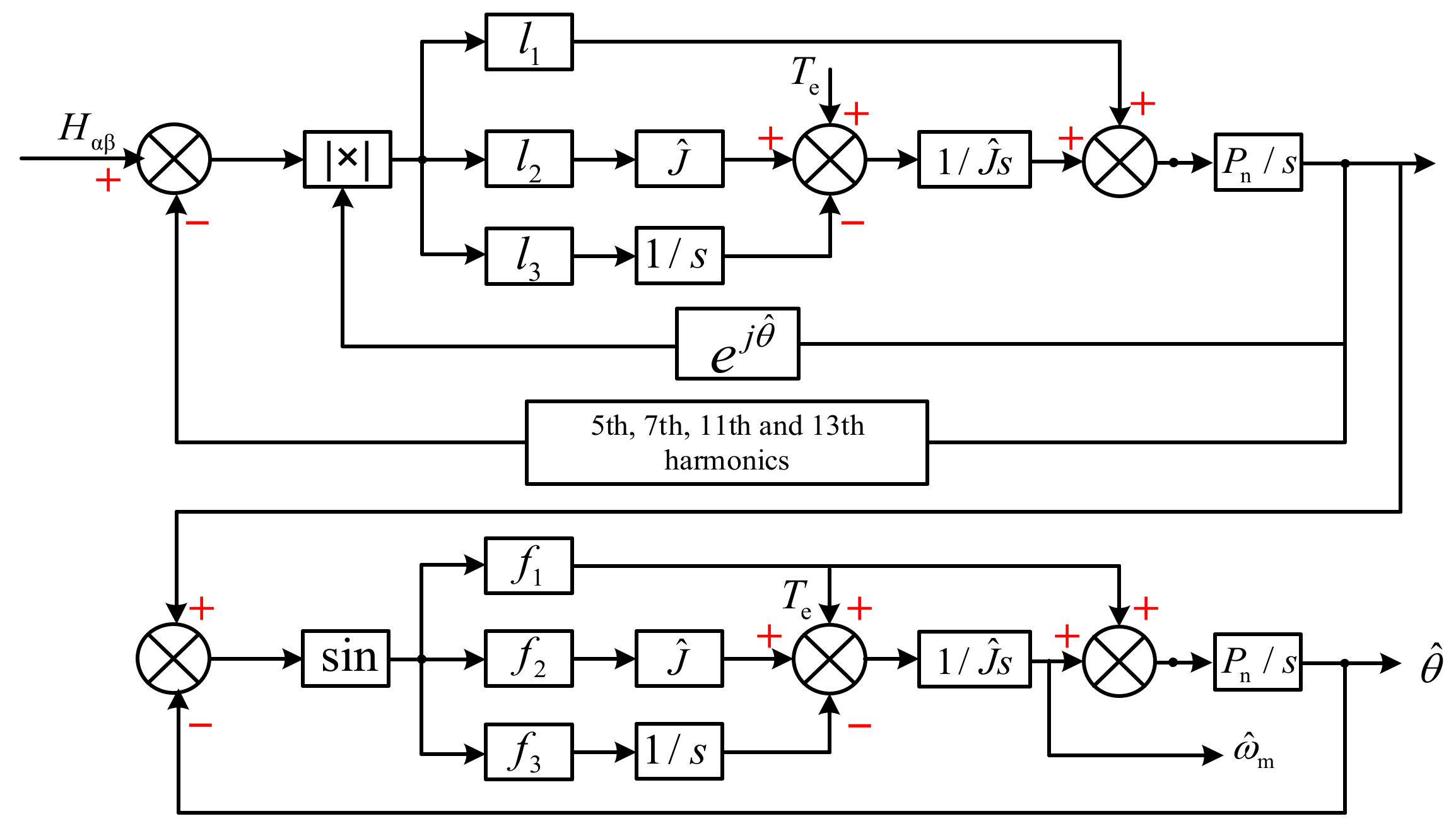
4.2. The Proposed Dual Observer
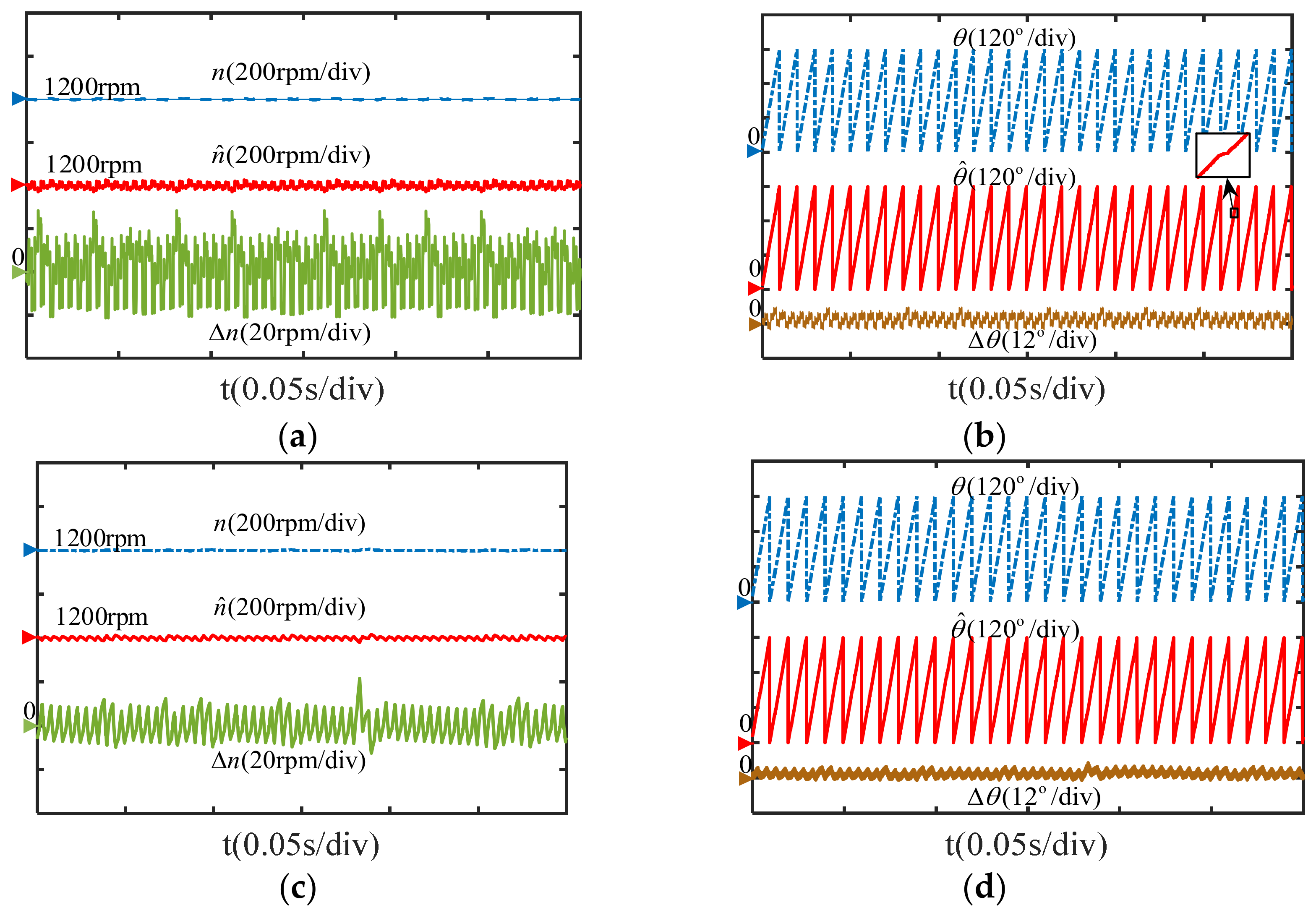
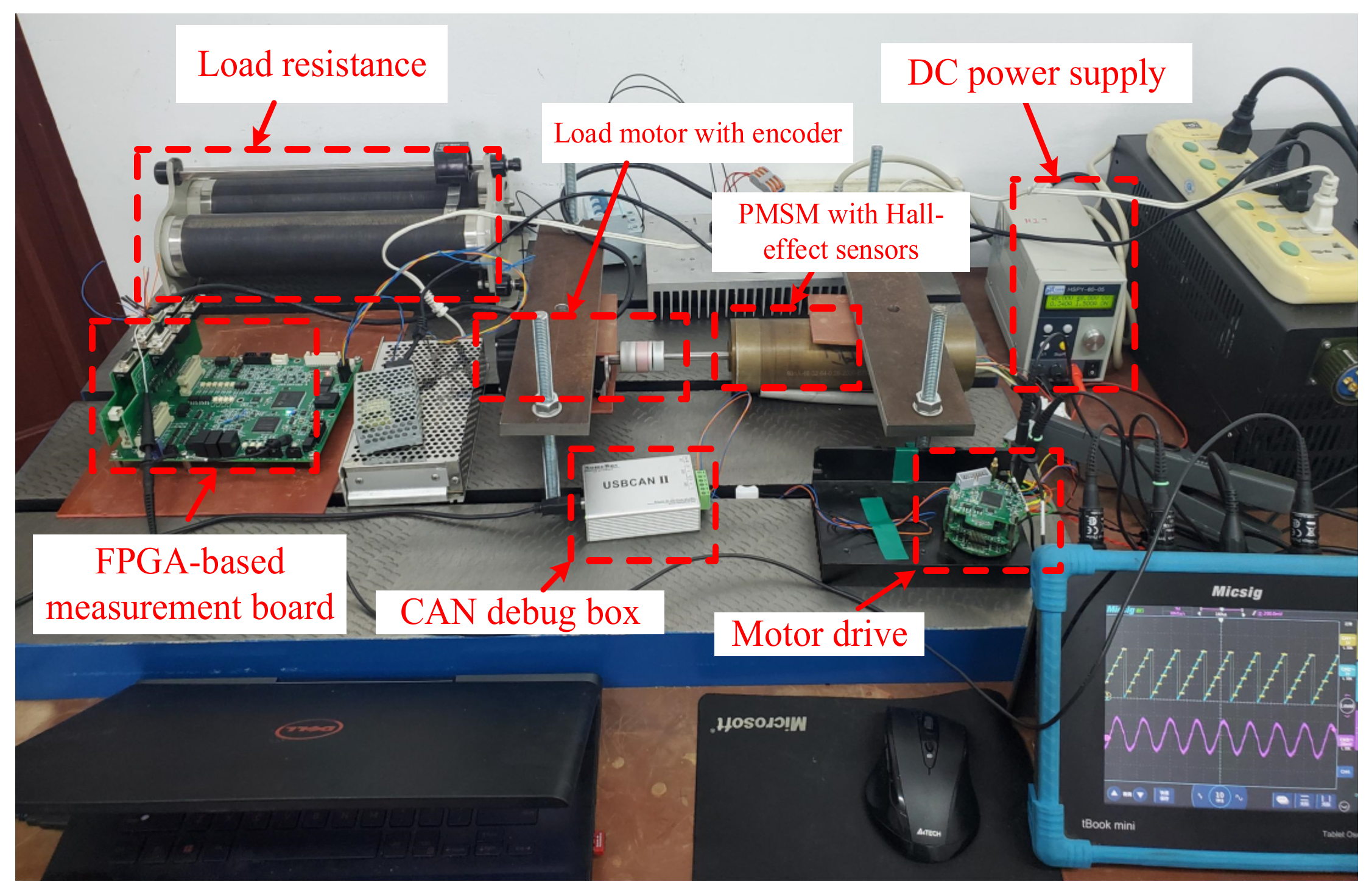
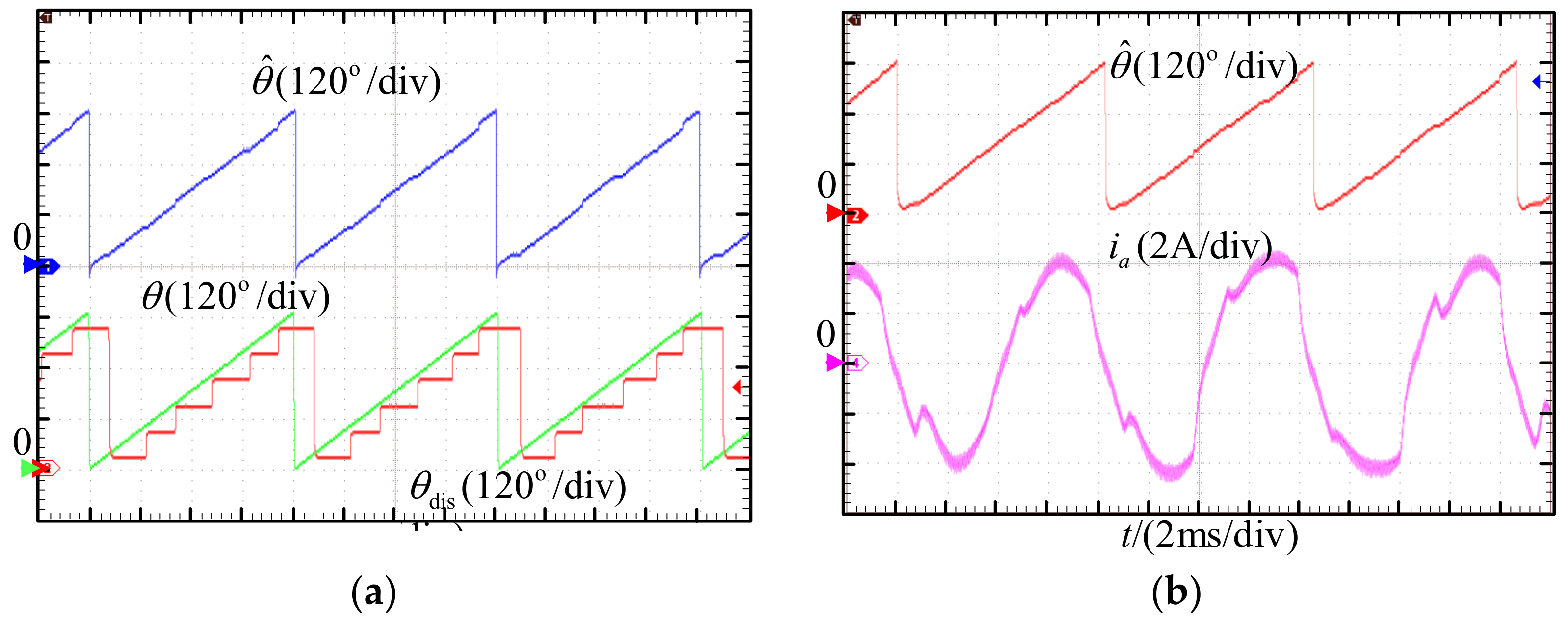
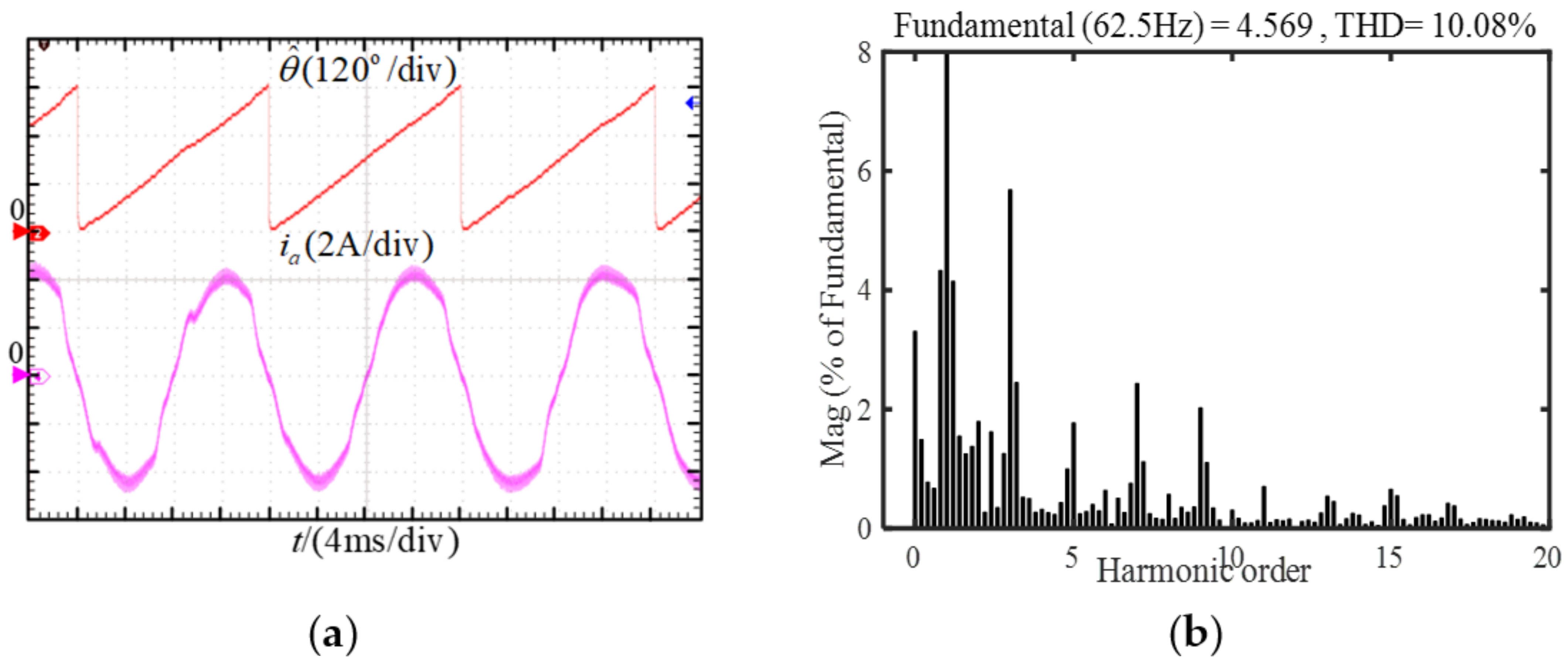
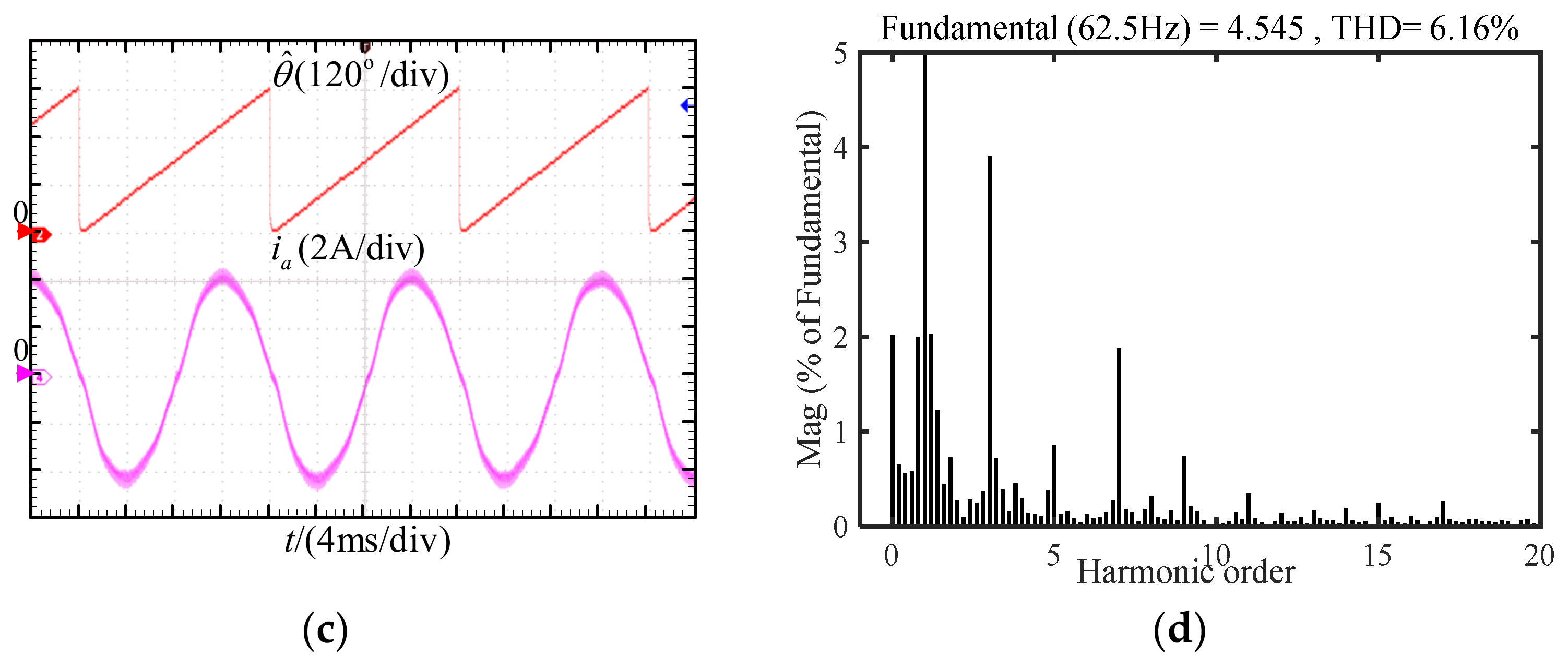
5. Experimental Verification
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, J.; Jiang, Q.; Xiong, D. Review of Rotor Position and Speed Estimation Method of PMSM with Hall Sensor. In Proceedings of the 2021 IEEE 16th Conference on Industrial Electronics and Applications (ICIEA), Chengdu, China, 1–4 August 2021; pp. 1832–1837. [Google Scholar]
- Morimoto, S.; Sanada, M.; Takeda, Y. Sinusoidal Current Drive System of Permanent Magnet Synchronous Motor with Low Resolution Position Sensor. In Proceedings of the IAS ’96, Conference Record of the 1996 IEEE Industry Applications Conference Thirty-First IAS Annual Meeting, San Diego, CA, USA, 6–10 October 1996; Volume 1, pp. 9–14. [Google Scholar]
- Capponi, F.G.; De Donato, G.; Del Ferraro, L. Brushless AC Drive Using an Axial Flux Synchronous PM Motor with Low Resolution Position Sensors. In Proceedings of the 2004 IEEE 35th Annual Power Electronics Specialists Conference (IEEE Cat. No.04CH37551), Aachen, Germany, 20–25 June 2004; Volume 3, pp. 2287–2292. [Google Scholar]
- Brown, R.H.; Schneider, S.C.; Mulligan, M.G. Analysis of Algorithms for Velocity Estimation from Discrete Position versus Time Data. IEEE Trans. Ind. Electron. 1992, 39, 11–19. [Google Scholar] [CrossRef]
- Dalala, Z.M.; Cho, Y.; Lai, J.-S. Enhanced Vector Tracking Observer for Rotor Position Estimation for PMSM Drives with Low Resolution Hall-Effect Position Sensors. In Proceedings of the 2013 International Electric Machines & Drives Conference, Chicago, IL, USA, 12–15 May 2013; pp. 484–491. [Google Scholar]
- Liu, G.; Chen, B.; Song, X. High-Precision Speed and Position Estimation Based on Hall Vector Frequency Tracking for PMSM With Bipolar Hall-Effect Sensors. IEEE Sens. J. 2019, 19, 2347–2355. [Google Scholar] [CrossRef]
- Lim, J.-H.; Park, S.M.; Hyon, B.J.; Park, J.S.; Kim, J.-H.; Choi, J.-H. Study on PMSM Rotor Position Compensation Method for Hall-Effect Sensor Installation Error Using WBG- Based Inverter. In Proceedings of the 2021 24th International Conference on Electrical Machines and Systems (ICEMS), Gyeongju, Korea, 31 October–3 November 2021; pp. 1844–1848. [Google Scholar]
- Bolognani, S.; Tubiana, L.; Zigliotto, M. Extended Kalman Filter Tuning in Sensorless PMSM Drives. IEEE Trans. Ind. Appl. 2003, 39, 1741–1747. [Google Scholar] [CrossRef]
- Batzel, T.D.; Lee, K.Y. Commutation Torque Ripple Minimization for Permanent Magnet Synchronous Machines with Hall Effect Position Feedback. IEEE Trans. Energy Convers. 1998, 13, 257–262. [Google Scholar] [CrossRef]
- Zaim, S.; Martin, J.P.; Nahid-Mobarakeh, B.; Meibody-Tabar, F. High Performance Low Cost Control of a Permanent Magnet Wheel Motor Using a Hall Effect Position Sensor. In Proceedings of the 2011 IEEE Vehicle Power and Propulsion Conference, Chicago, IL, USA, 6–9 September 2011; pp. 1–6. [Google Scholar]
- Kim, K.S.; Lee, J.H.; Lee, J.H.; Won, C.Y. Control Algorithm PMSM Using Rectangular 2 Hall Sensors Compensated by Sensorless Control Method. In Proceedings of the 2011 International Conference on Electrical Machines and Systems, Beijing, China, 20–23August 2011; pp. 1–6. [Google Scholar]
- Kim, S.-Y.; Choi, C.; Lee, K.; Lee, W. An Improved Rotor Position Estimation With Vector-Tracking Observer in PMSM Drives With Low-Resolution Hall-Effect Sensors. IEEE Trans. Ind. Electron. 2011, 58, 4078–4086. [Google Scholar] [CrossRef]
- Zhang, P.; Zhang, Q. A Controller of PMSM for Elctrical Bicycle with Hall Effect Sensors. In Proceedings of the 2016 IEEE 11th Conference on Industrial Electronics and Applications (ICIEA), Hefei, China, 5–7 June 2016; pp. 619–623. [Google Scholar]
- Yao, X.; Huang, S.; Wang, J.; Zhang, F.; Wang, Y.; Ma, H. Pseudo Sensorless Deadbeat Predictive Current Control for PMSM Drives With Hall-Effect Sensors. In Proceedings of the 2021 IEEE International Electric Machines & Drives Conference (IEMDC), Virtual Event. 16–18 May 2021; pp. 1–6. [Google Scholar]
- Giulii Capponi, F.; De Donato, G.; Del Ferraro, L.; Honorati, O.; Harke, M.C.; Lorenz, R.D. AC Brushless Drive with Low-Resolution Hall-Effect Sensors for Surface-Mounted PM Machines. IEEE Trans. Ind. Appl. 2006, 42, 526–535. [Google Scholar] [CrossRef]
- Harke, M.C.; De Donato, G.; Giulii Capponi, F.; Tesch, T.R.; Lorenz, R.D. Implementation Issues and Performance Evaluation of Sinusoidal, Surface-Mounted PM Machine Drives With Hall-Effect Position Sensors and a Vector-Tracking Observer. IEEE Trans. Ind. Appl. 2008, 44, 161–173. [Google Scholar] [CrossRef]
- Ahn, H.-J.; Lee, D.-M. A New Bumpless Rotor-Flux Position Estimation Scheme for Vector-Controlled Washing Machine. IEEE Trans. Ind. Inf. 2016, 12, 466–473. [Google Scholar] [CrossRef]
- Ni, O.; Yang, M.; Odhano, S.A.; Zanchetta, P.; Liu, X.; Xu, D. Analysis and Design of Position and Velocity Estimation Scheme for PM Servo Motor Drive with Binary Hall Sensors. In Proceedings of the 2018 IEEE Energy Conversion Congress and Exposition (ECCE), Portland, OR, USA, 23–27 September 2018; pp. 6967–6974. [Google Scholar]
- Ni, Q.; Yang, M.; Odhano, S.A.; Tang, M.; Zanchetta, P.; Liu, X.; Xu, D. A New Position and Speed Estimation Scheme for Position Control of PMSM Drives Using Low-Resolution Position Sensors. IEEE Trans. Ind. Appl. 2019, 55, 3747–3758. [Google Scholar] [CrossRef]
- Yoo, A.; Sul, S.-K.; Lee, D.-C.; Jun, C.-S. Novel Speed and Rotor Position Estimation Strategy Using a Dual Observer for Low-Resolution Position Sensors. IEEE Trans. Power Electron. 2009, 24, 2897–2906. [Google Scholar] [CrossRef]
- Zhao-yong, Z.; Zheng, X.; Tie-cai, L. FPGA Implementation of a New Hybrid Rotor Position Estimation Scheme Based on Three Symmetrical Locked Hall Effect Position Sensors. In Proceedings of the The 4th International Power Electronics and Motion Control Conference (IPEMC), IPEMC 2004, Xi′an, China, 14–16 August 2004; Volume 3, pp. 1592–1596. [Google Scholar]
- Zhao, Y.; Huang, W.; Yang, J. Fault Diagnosis of Low-Cost Hall-Effect Sensors Used in Controlling Permanent Magnet Synchronous Motor. In Proceedings of the 2016 19th International Conference on Electrical Machines and Systems (ICEMS), Chiba, Japan, 13–16 November; pp. 1–5.
- Park, Y.; Yang, C.; Lee, S.B.; Lee, D.-M.; Fernandez, D.; Reigosa, D.; Briz, F. Online Detection and Classification of Rotor and Load Defects in PMSMs Based on Hall Sensor Measurements. IEEE Trans. Ind. Applicat. 2019, 55, 3803–3812. [Google Scholar] [CrossRef]
- Wang, Z.; Wang, K.; Zhang, J.; Liu, C.; Cao, R. Improved Rotor Position Estimation for Permanent Magnet Synchronous Machines Based on Hall-Effect Sensors. In Proceedings of the 2016 IEEE International Conference on Aircraft Utility Systems (AUS), Beijing, China, 10–12 October 2016; pp. 911–916. [Google Scholar]
- Miguel-Espinar, C.; Heredero-Peris, D.; Igor-Gross, G.; Llonch-Masachs, M.; Montesinos-Miracle, D. An Enhanced Electrical Angle Representation in PMSM Control with Misplaced Hall-Effect Switch Sensors. In Proceedings of the 2020 23rd International Conference on Electrical Machines and Systems (ICEMS), Hamamatsu, Japan, 24–27 November 2020; pp. 1454–1459. [Google Scholar]
- Fernandez, D.; Reigosa, D.; Park, Y.; Lee, S.; Briz, F. Hall-Effect Sensors as Multipurpose Devices to Control, Monitor and Diagnose AC Permanent Magnet Synchronous Machines. In Proceedings of the 2021 IEEE Energy Conversion Congress and Exposition (ECCE), Vancouver, BC, Canada, 10–14 October 2021; pp. 4967–4972. [Google Scholar]
- Wu, Z.; Zuo, S.; Huang, Z.; Hu, X.; Chen, S.; Liu, C.; Zhuang, H. Effect of Hall Errors on Electromagnetic Vibration and Noise of Integer-Slot Inset Permanent Magnet Synchronous Motors. IEEE Trans. Transp. Electrif. 2022, 1. [Google Scholar] [CrossRef]
- Muley, N.; Saxena, A.; Chaudhary, P. Comparative Evaluation of Methods for Continuous Rotor Position Estimation Using Low Resolution Hall Sensors. In Proceedings of the 2021 National Power Electronics Conference (NPEC), Bhubaneswar, India, 15 December 2021; pp. 1–6. [Google Scholar]
- An, Q.; Chen, C.; Zhao, M.; Ma, T.; Ge, K. Research on Rotor Position Estimation of PMSM Based on Hall Position Sensor. In Proceedings of the 2021 IEEE 16th Conference on Industrial Electronics and Applications (ICIEA), Chengdu, China, 23–26 April 2021; pp. 2088–2094. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value (Unit) |
|---|---|
| Polar pairs PN | 5 |
| Flux ψf | 0.022 (Wb) |
| Stator resistance R | 0.18 (Ω) |
| Stator inductance L | 0.35 (mH) |
| Rated speed nN | 2000 (rpm) |
| Rated current iN | 7 (A) |
| Inertia J | 0.0001 (kg.m2) |
| Hall average deviation | 2 (deg) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, M.; An, Q.; Chen, C.; Cao, F.; Li, S. Observer Based Improved Position Estimation in Field-Oriented Controlled PMSM with Misplaced Hall-Effect Sensors. Energies 2022, 15, 5985. https://doi.org/10.3390/en15165985
Zhao M, An Q, Chen C, Cao F, Li S. Observer Based Improved Position Estimation in Field-Oriented Controlled PMSM with Misplaced Hall-Effect Sensors. Energies. 2022; 15(16):5985. https://doi.org/10.3390/en15165985
Chicago/Turabian StyleZhao, Mengji, Quntao An, Changqing Chen, Fuqiang Cao, and Siwen Li. 2022. "Observer Based Improved Position Estimation in Field-Oriented Controlled PMSM with Misplaced Hall-Effect Sensors" Energies 15, no. 16: 5985. https://doi.org/10.3390/en15165985
APA StyleZhao, M., An, Q., Chen, C., Cao, F., & Li, S. (2022). Observer Based Improved Position Estimation in Field-Oriented Controlled PMSM with Misplaced Hall-Effect Sensors. Energies, 15(16), 5985. https://doi.org/10.3390/en15165985