
Fault Detecting and Isolating Schemes in a Low-Voltage DC Microgrid Network from a Remote Village


Abstract
:1. Introduction
- Detailed study of the LVDC microgrid networks, their topologies, possible faults in the LVDC microgrid, power protective devices, and fault protection method.
- Selection of the suitable and quick method for fault detection and isolation of the faulty segment in the LVDC microgrid network to efficiently protect that network.
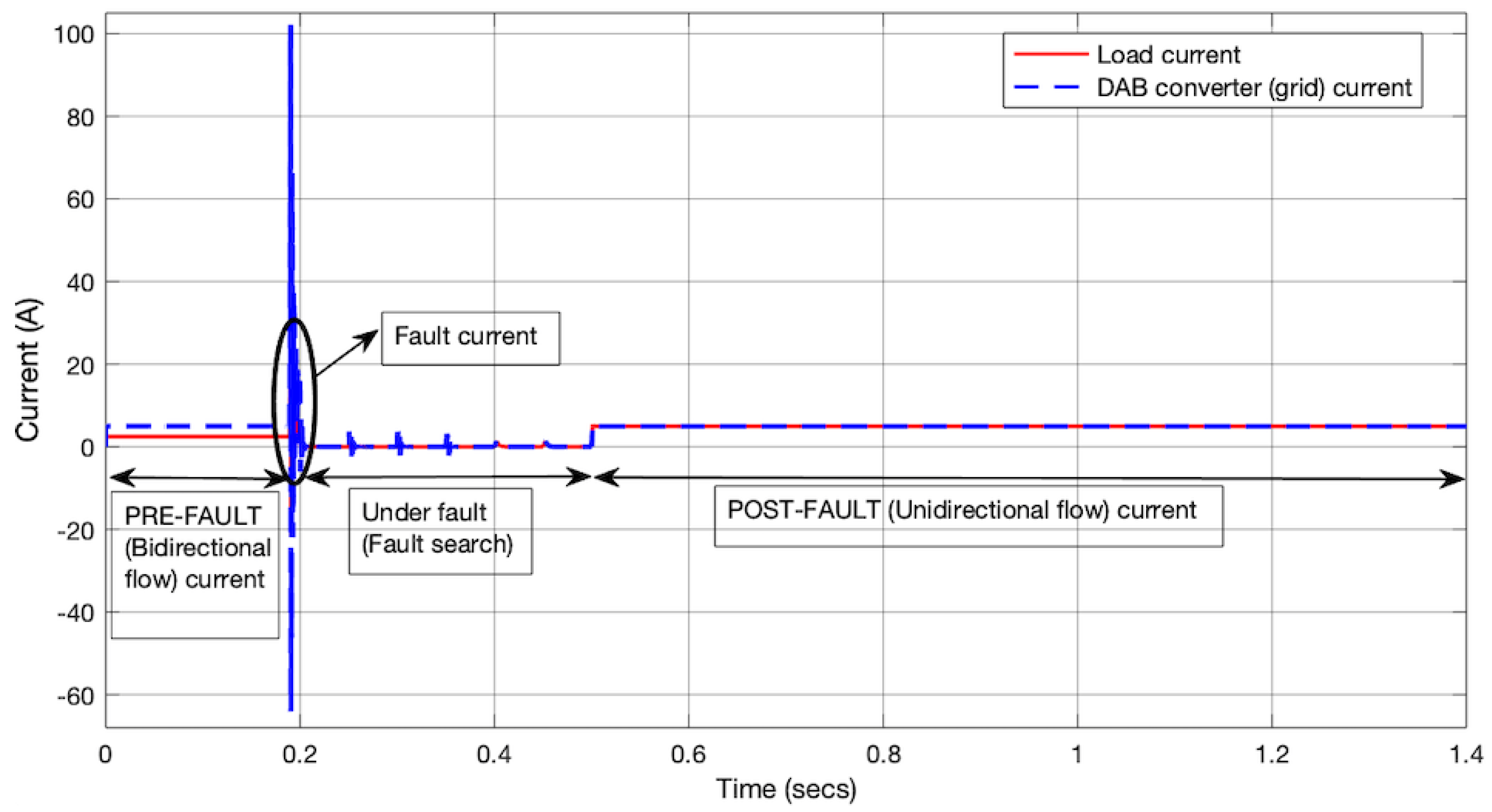
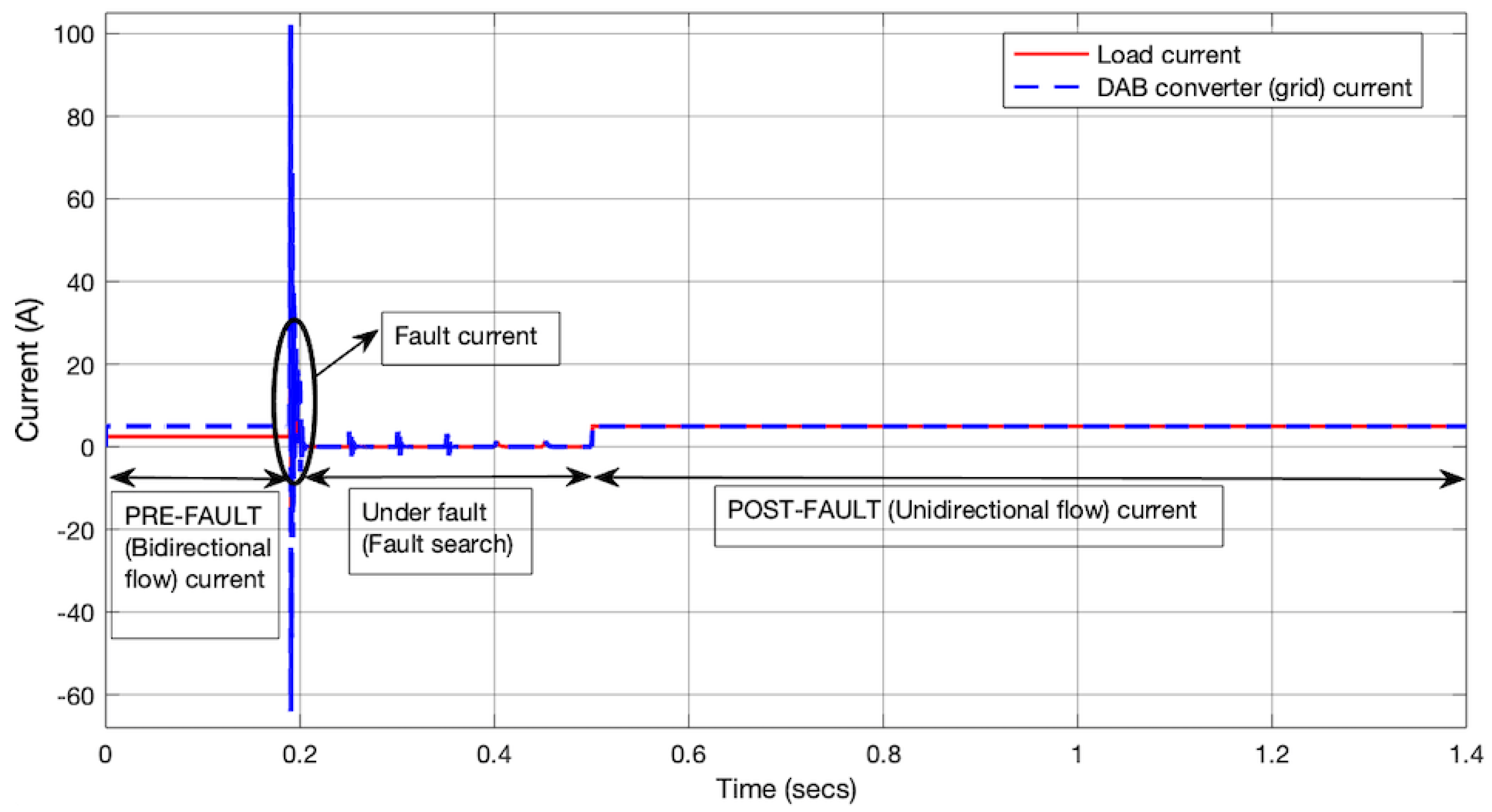
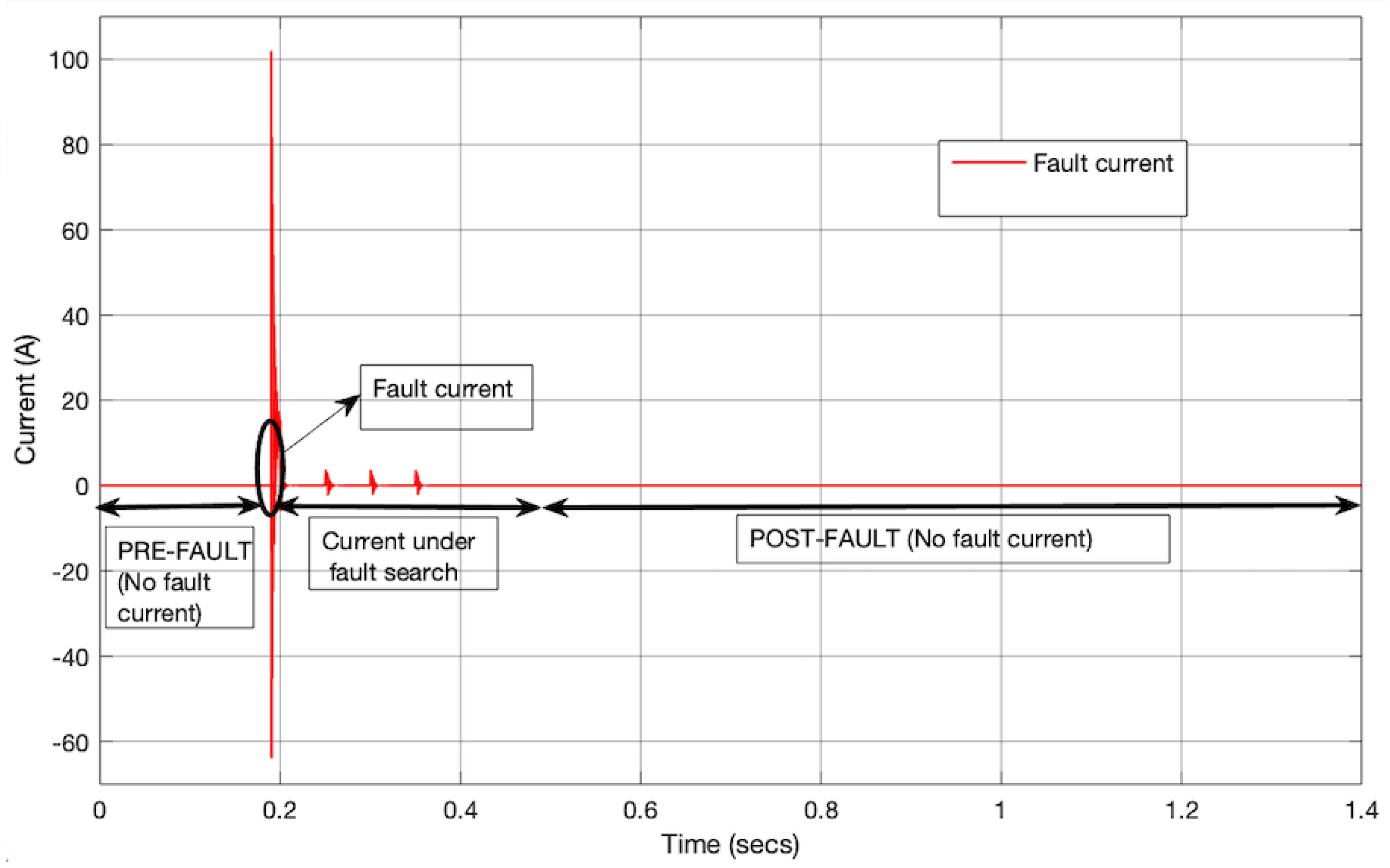
- Analysis of the fault current into the LVDC microgrid.
2. Background of DC Microgrids and Their Protection Systems
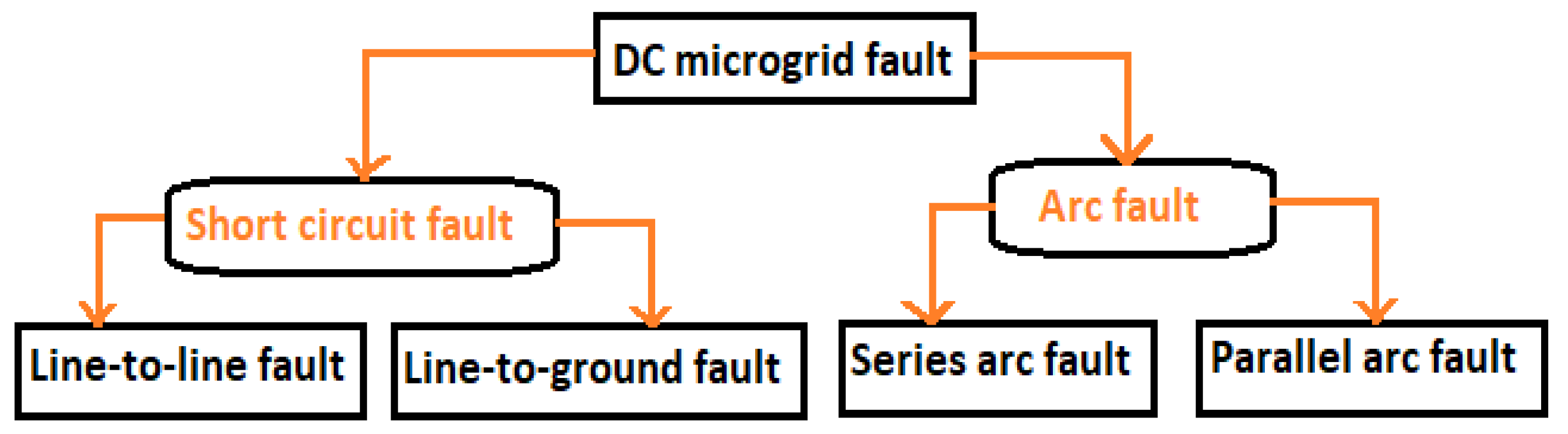
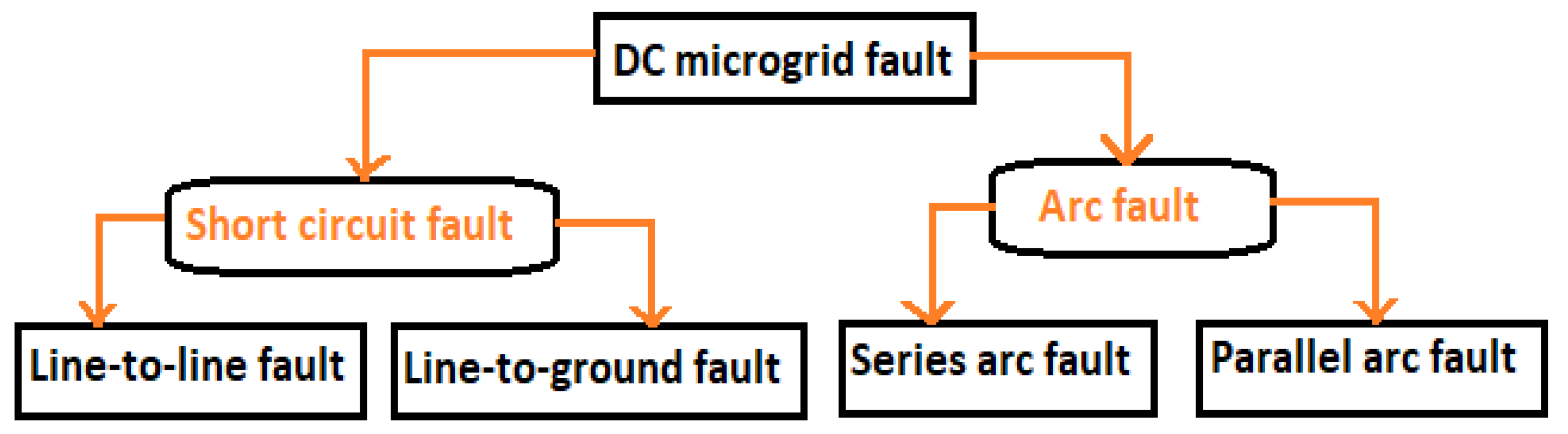
2.1. Possible Fault in DC Microgrid
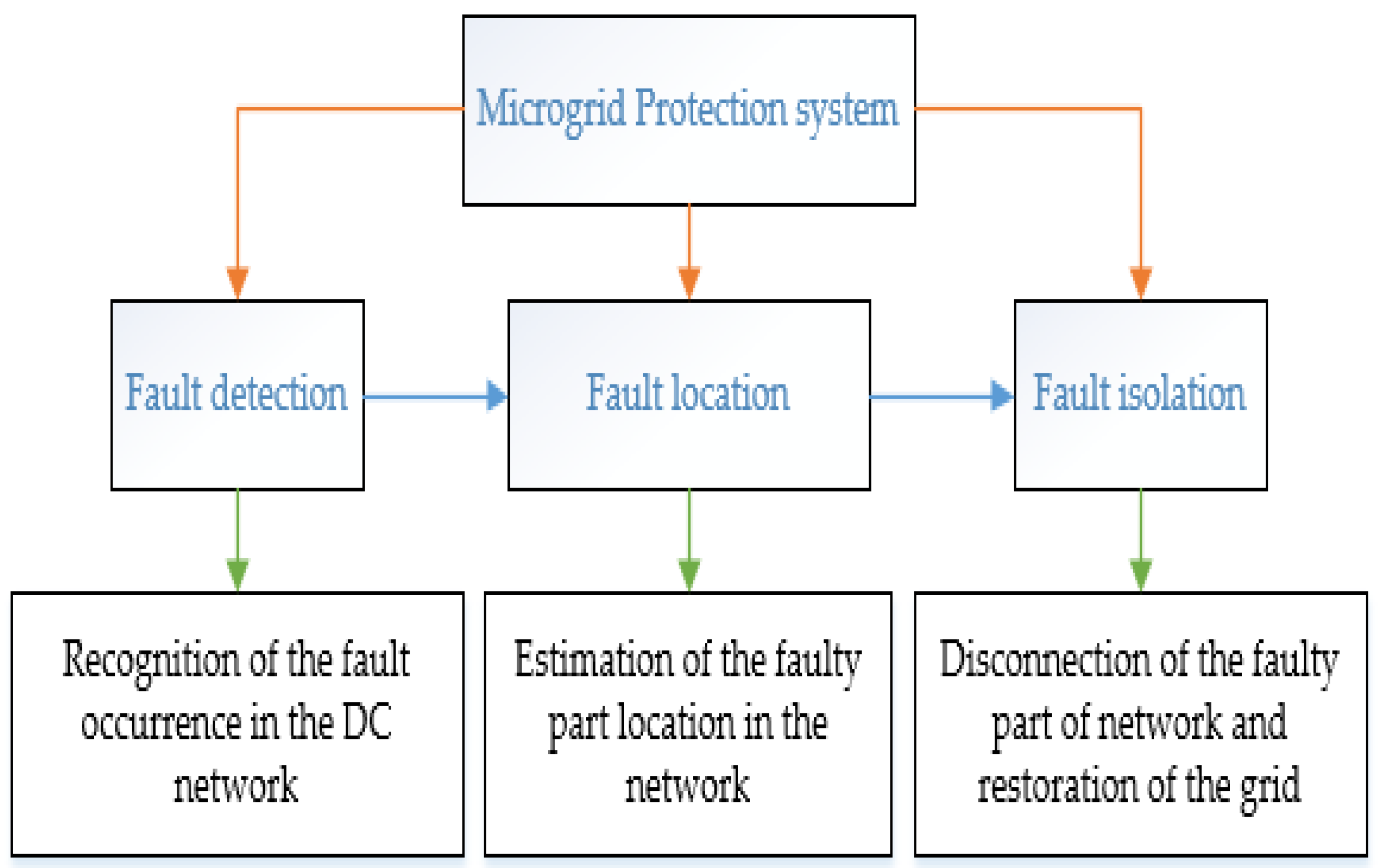
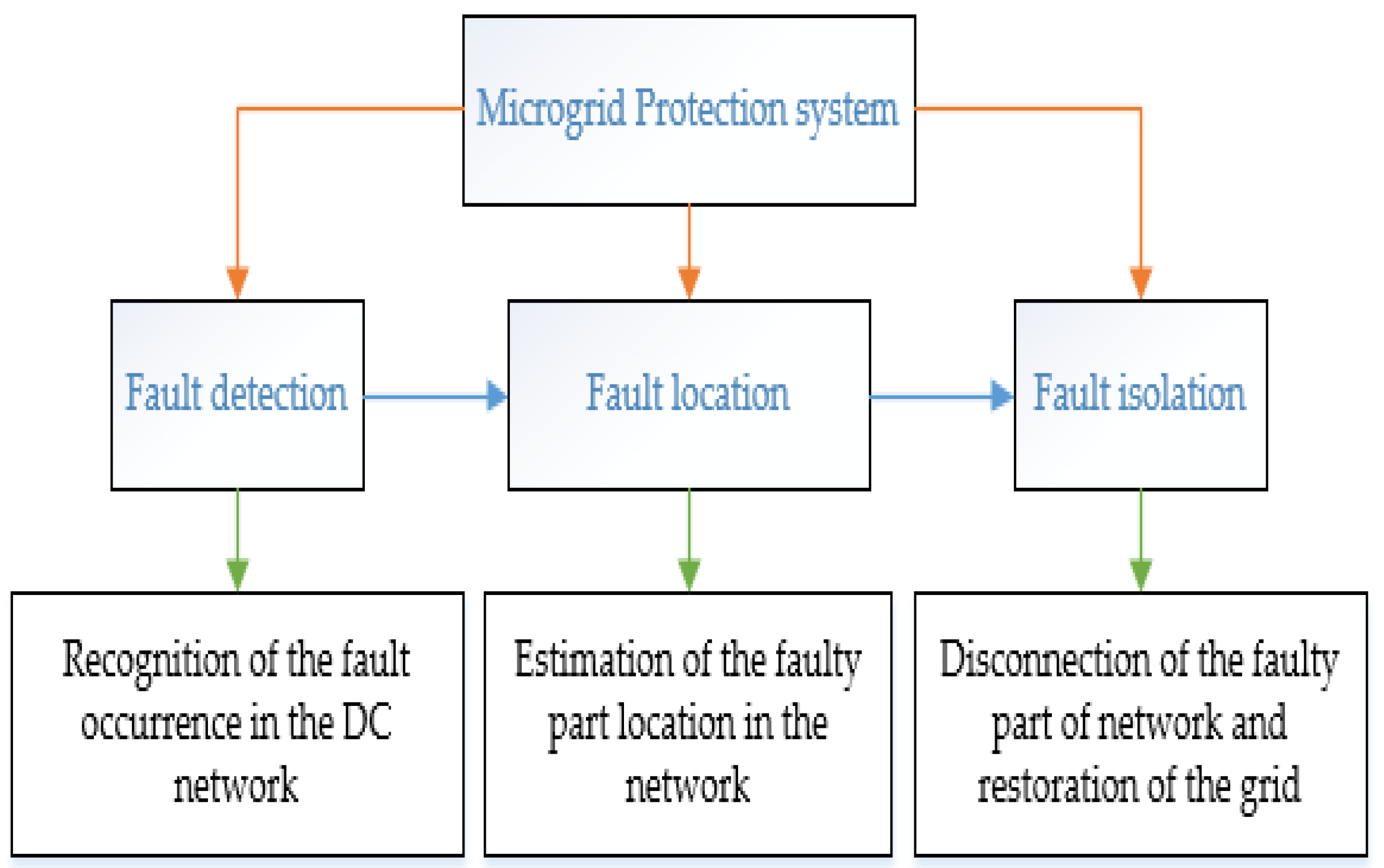
2.2. Network Protection and Fault Detection in the DCMG
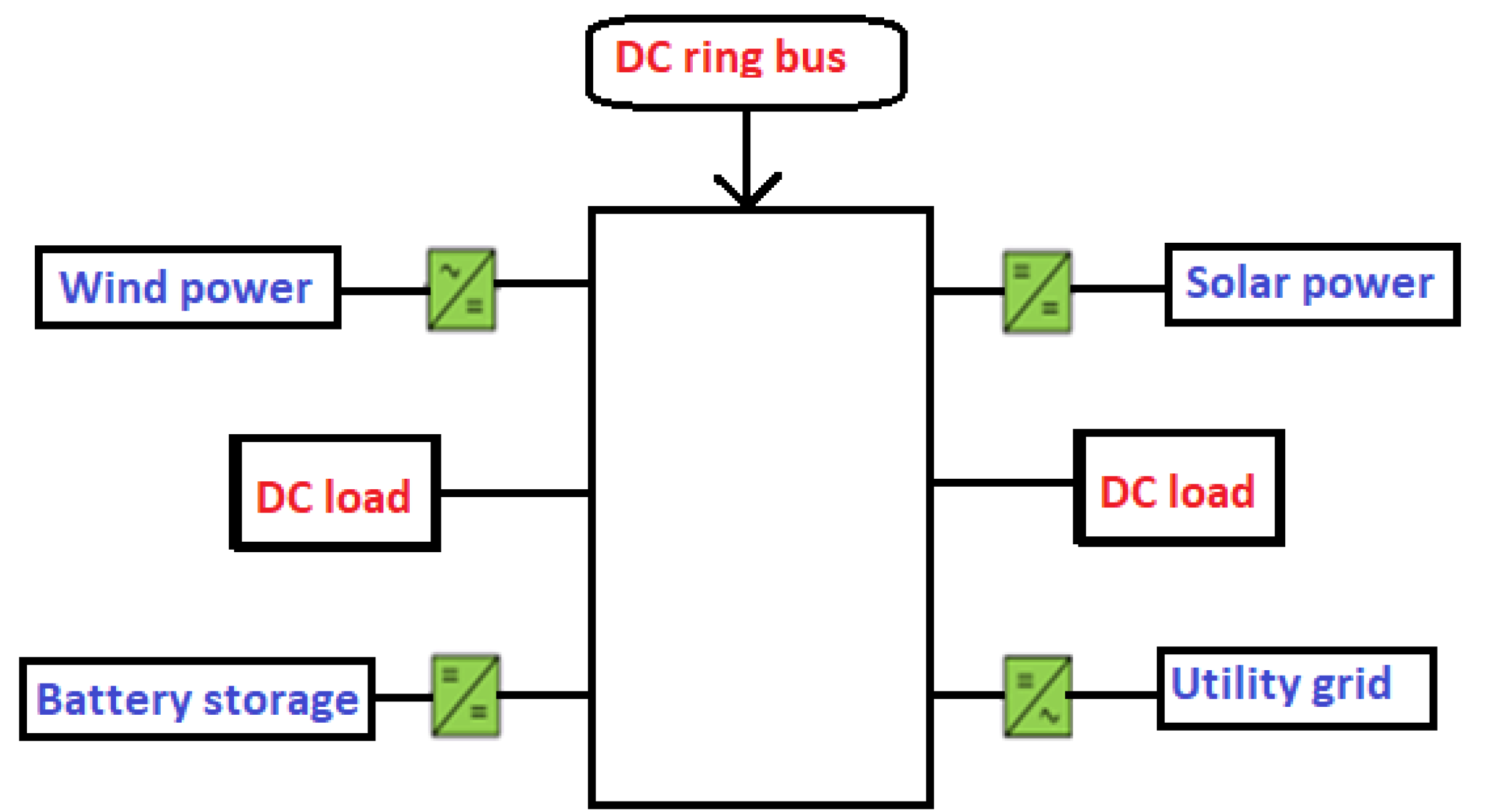
2.3. Rural Village LVDC Microgrid
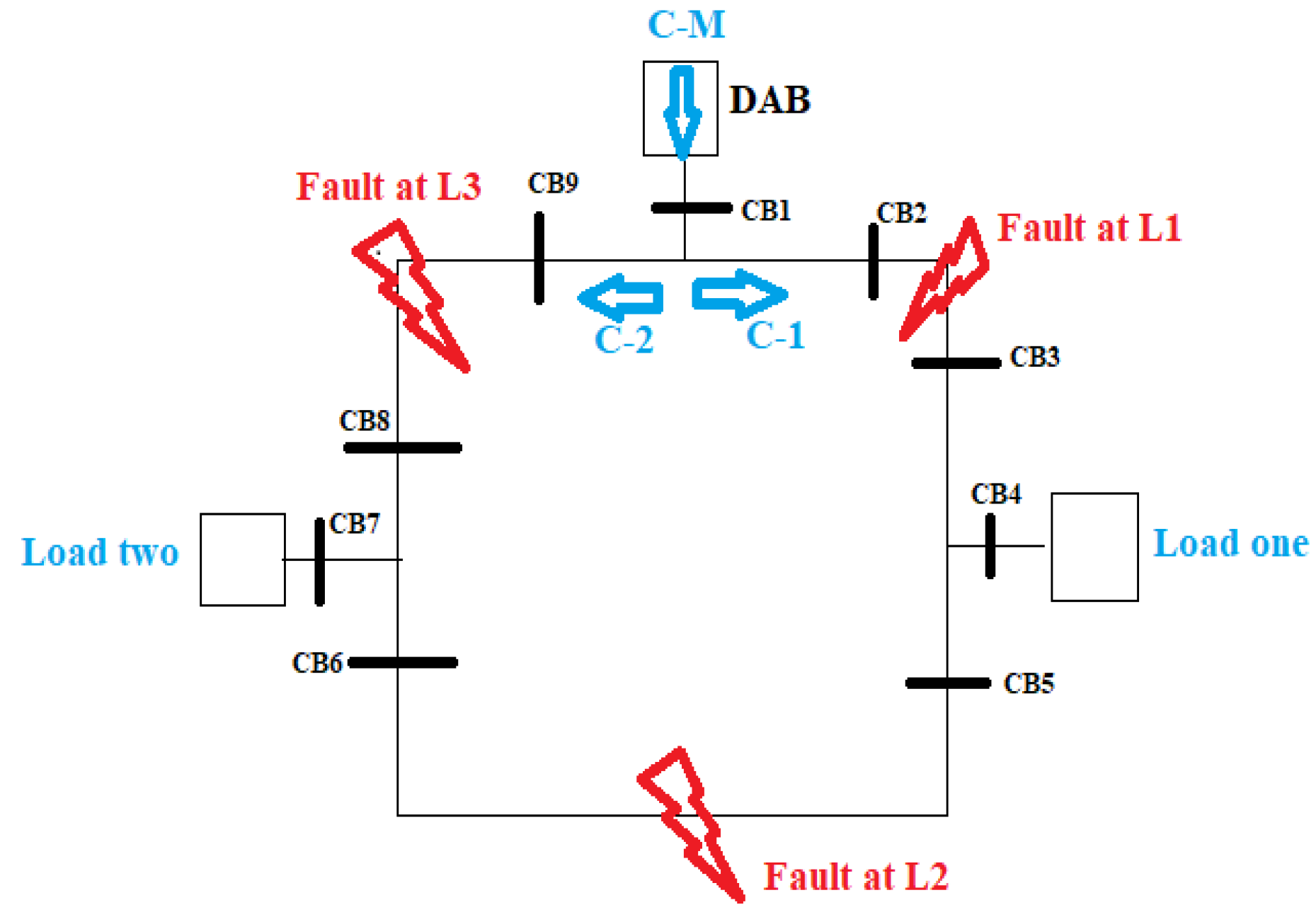
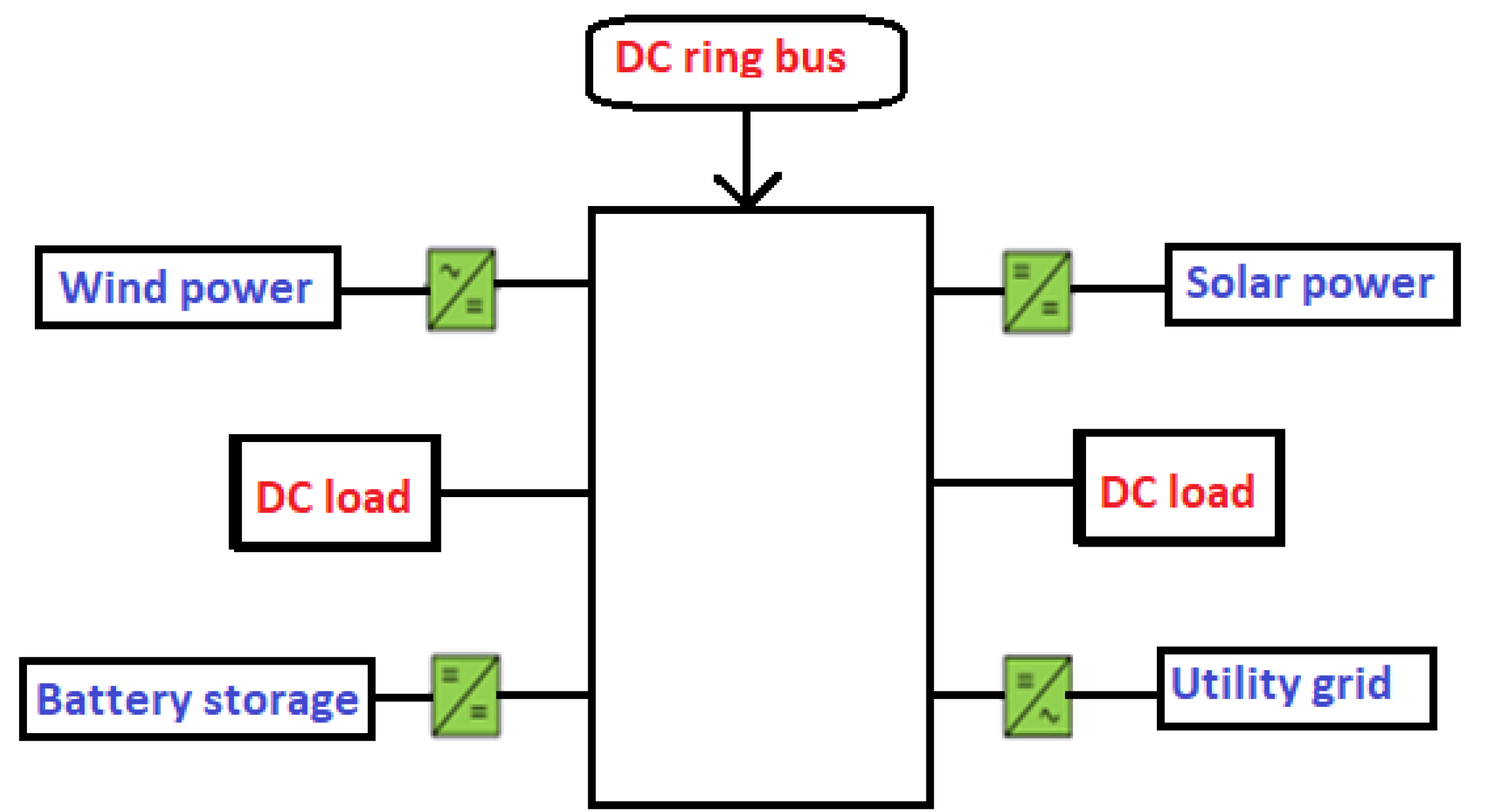
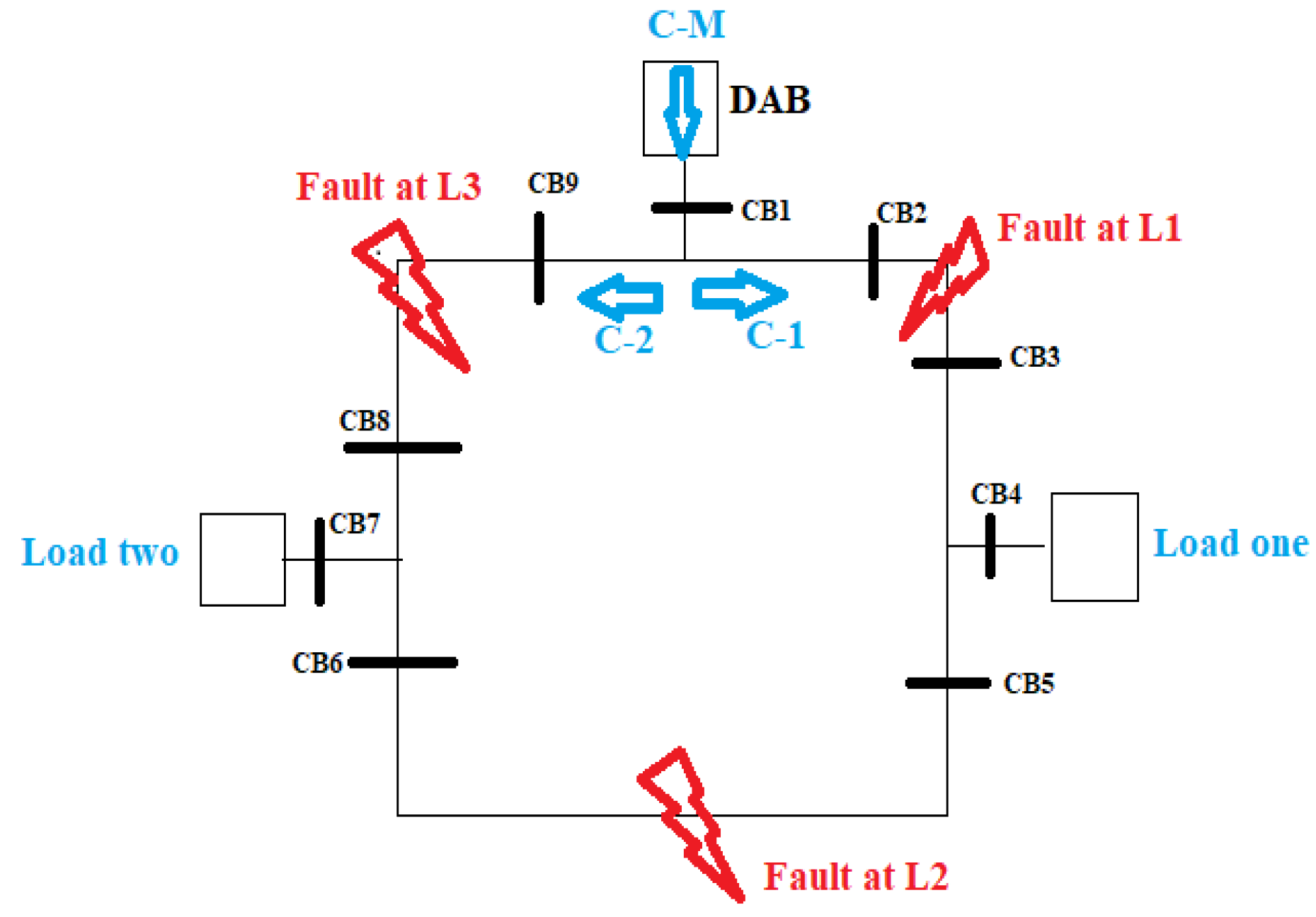
2.4. Proposed Topology for Fault Detection
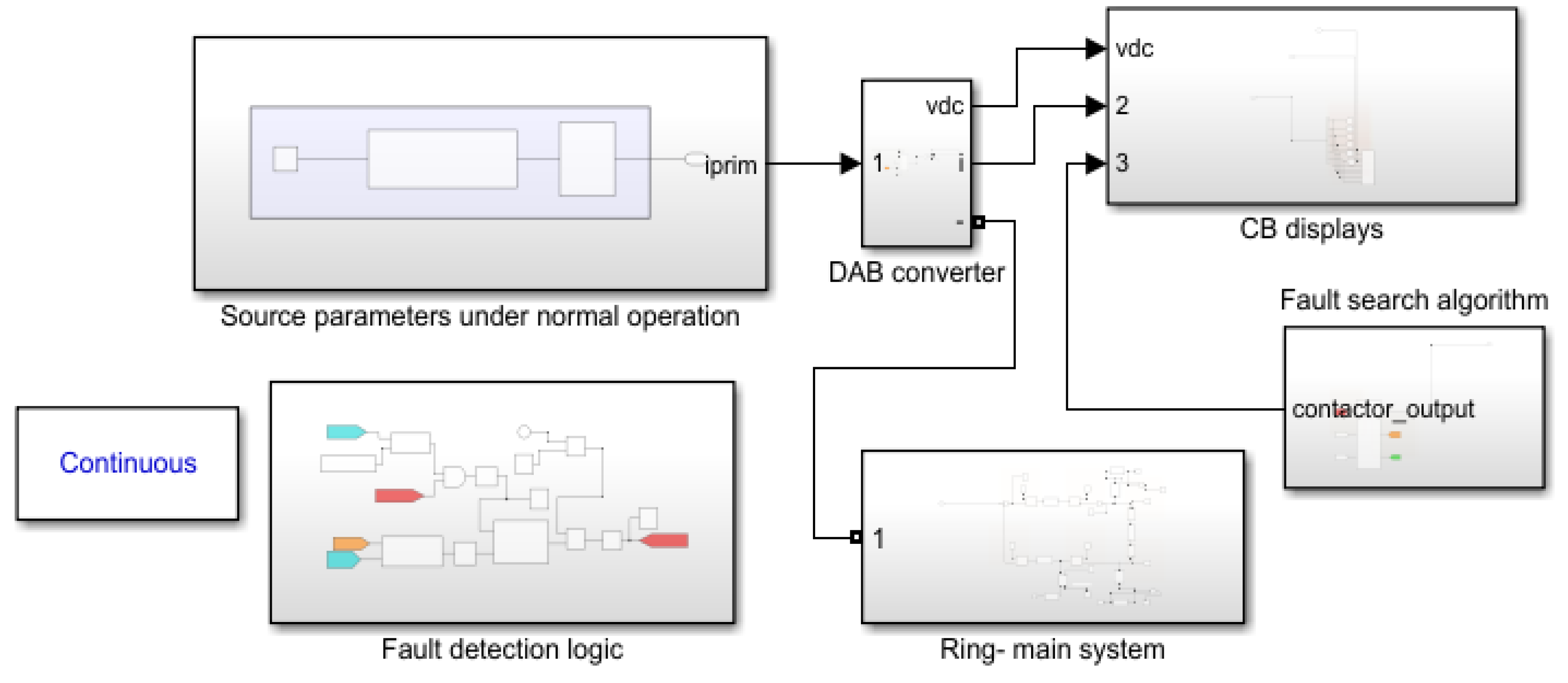
3. Methods and Materials
4. Results and Discussion
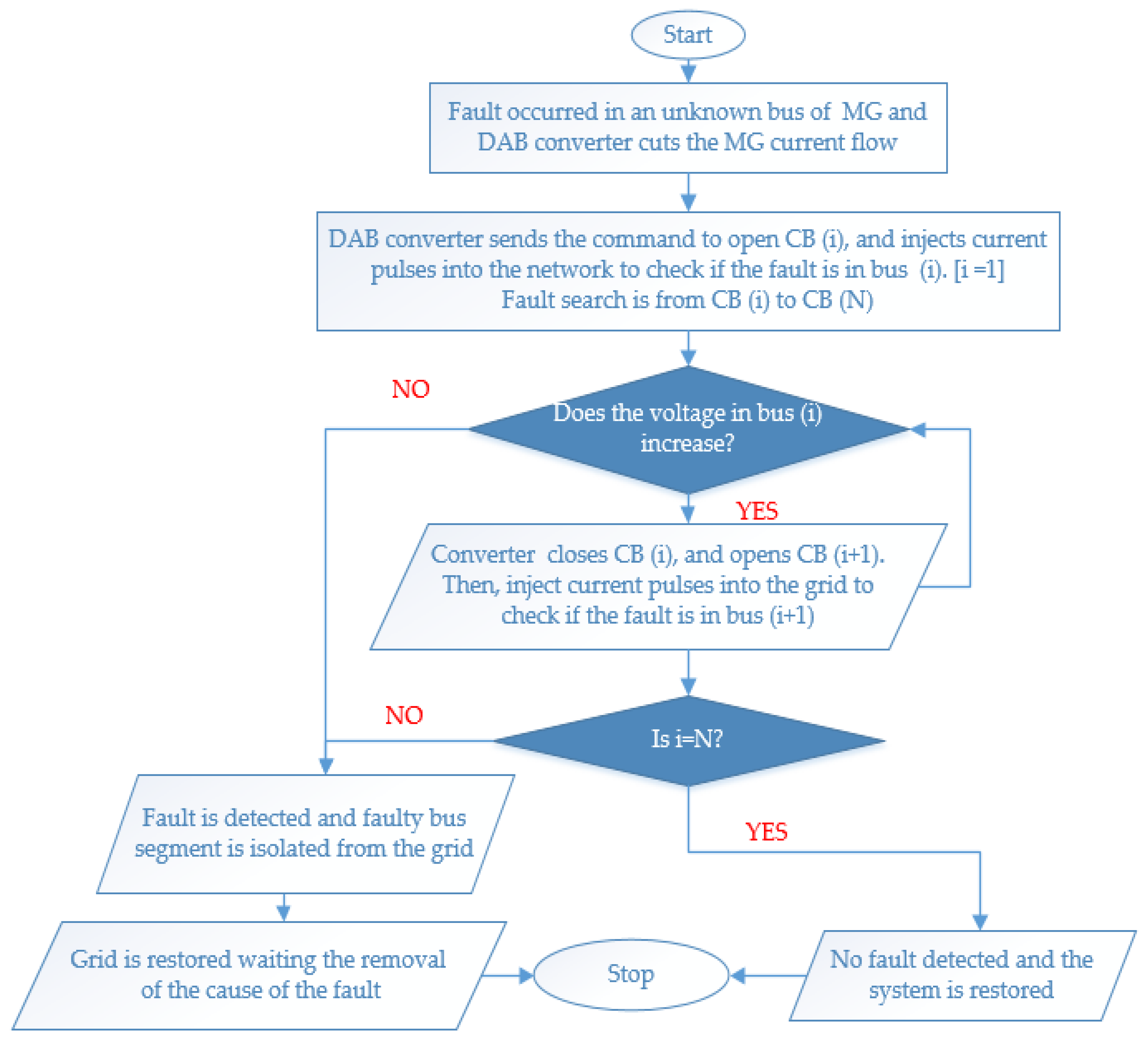
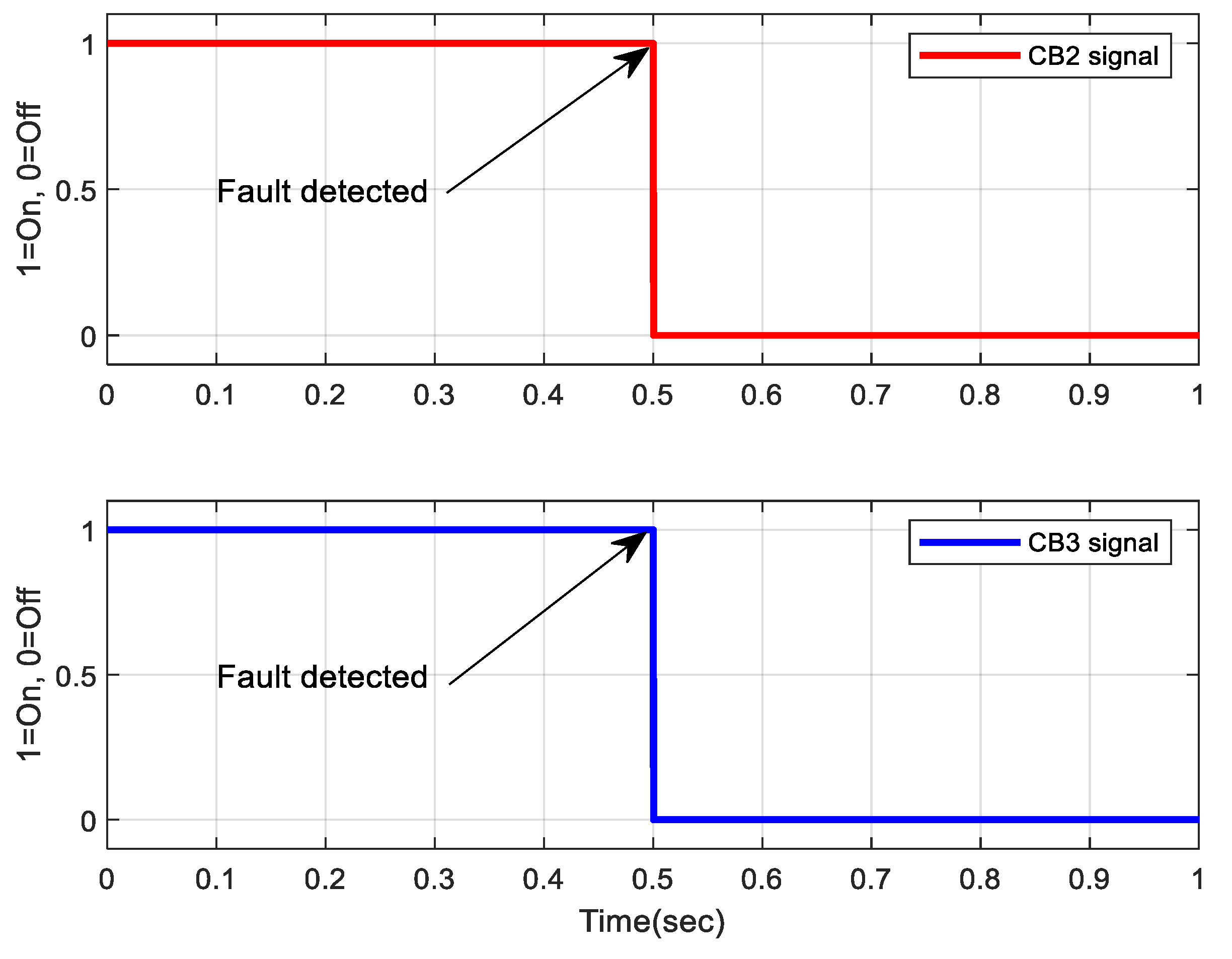
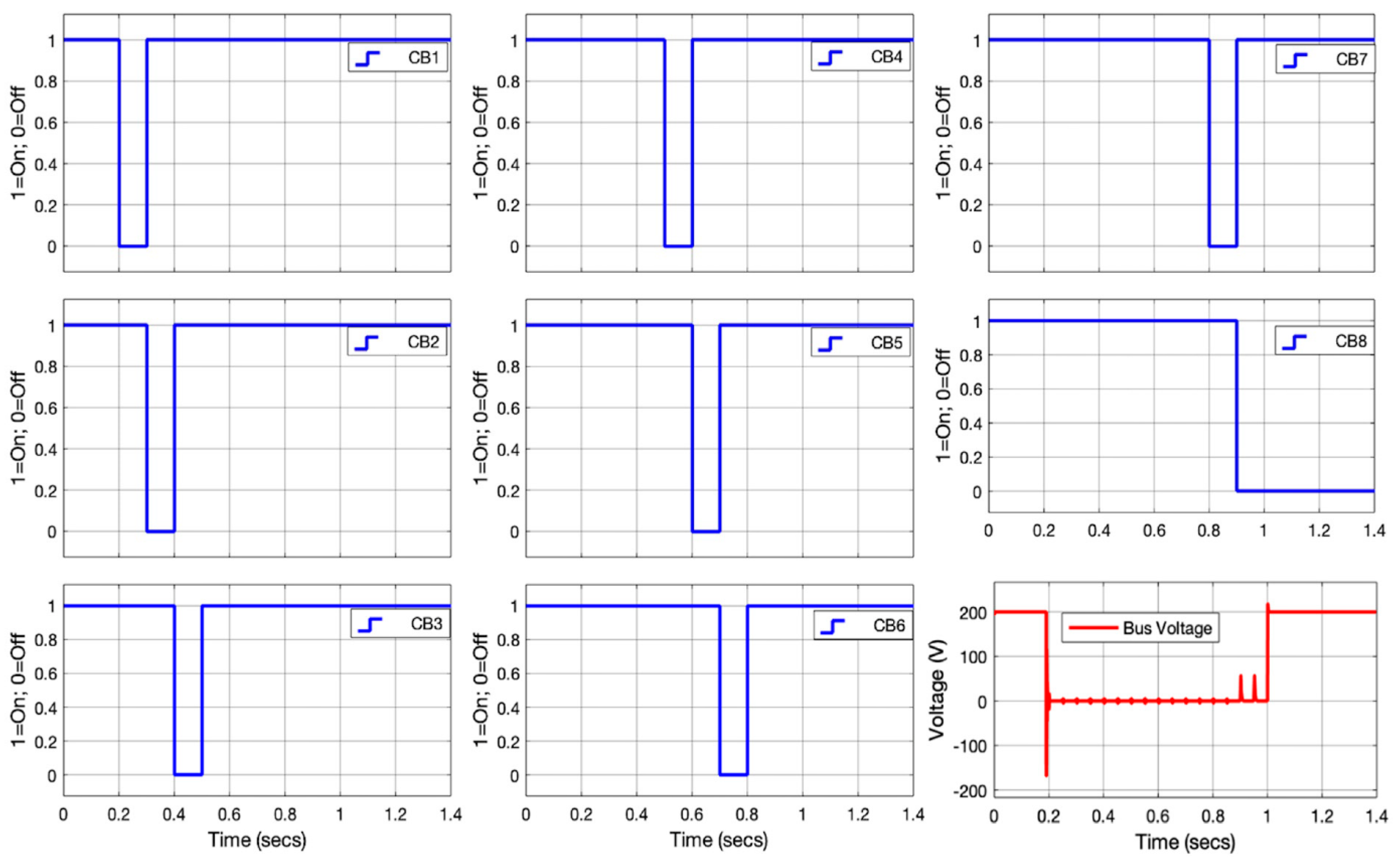
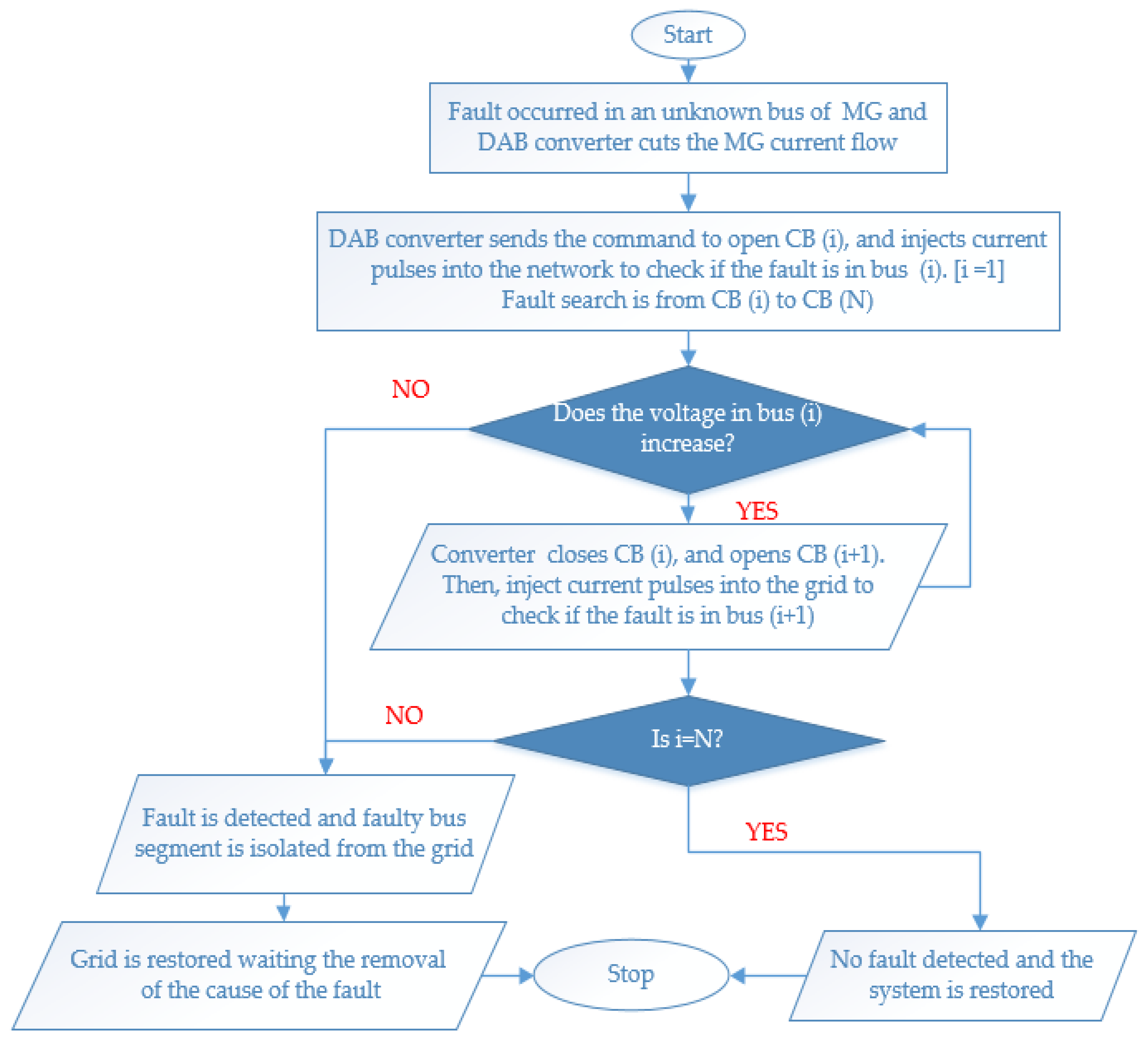
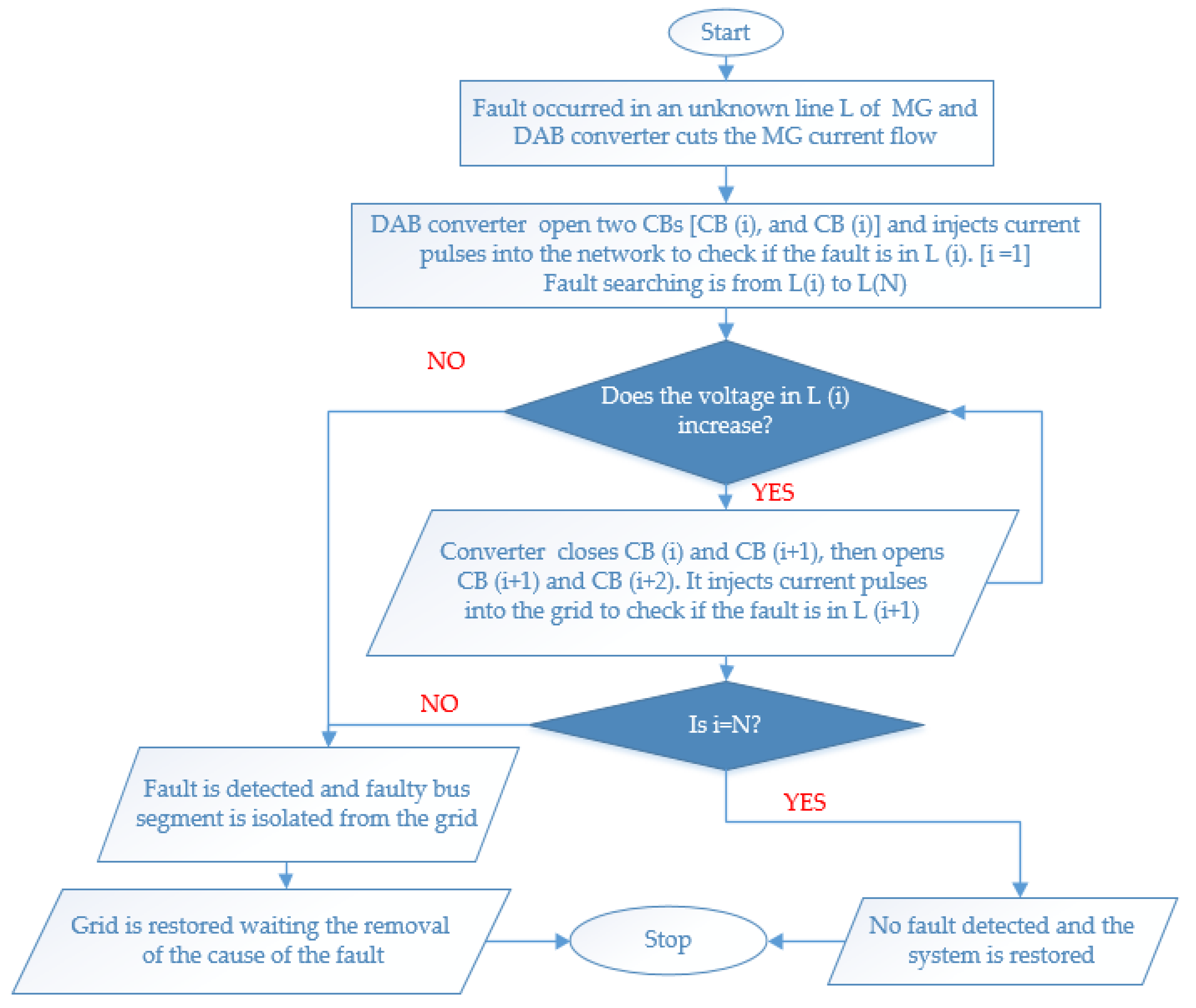
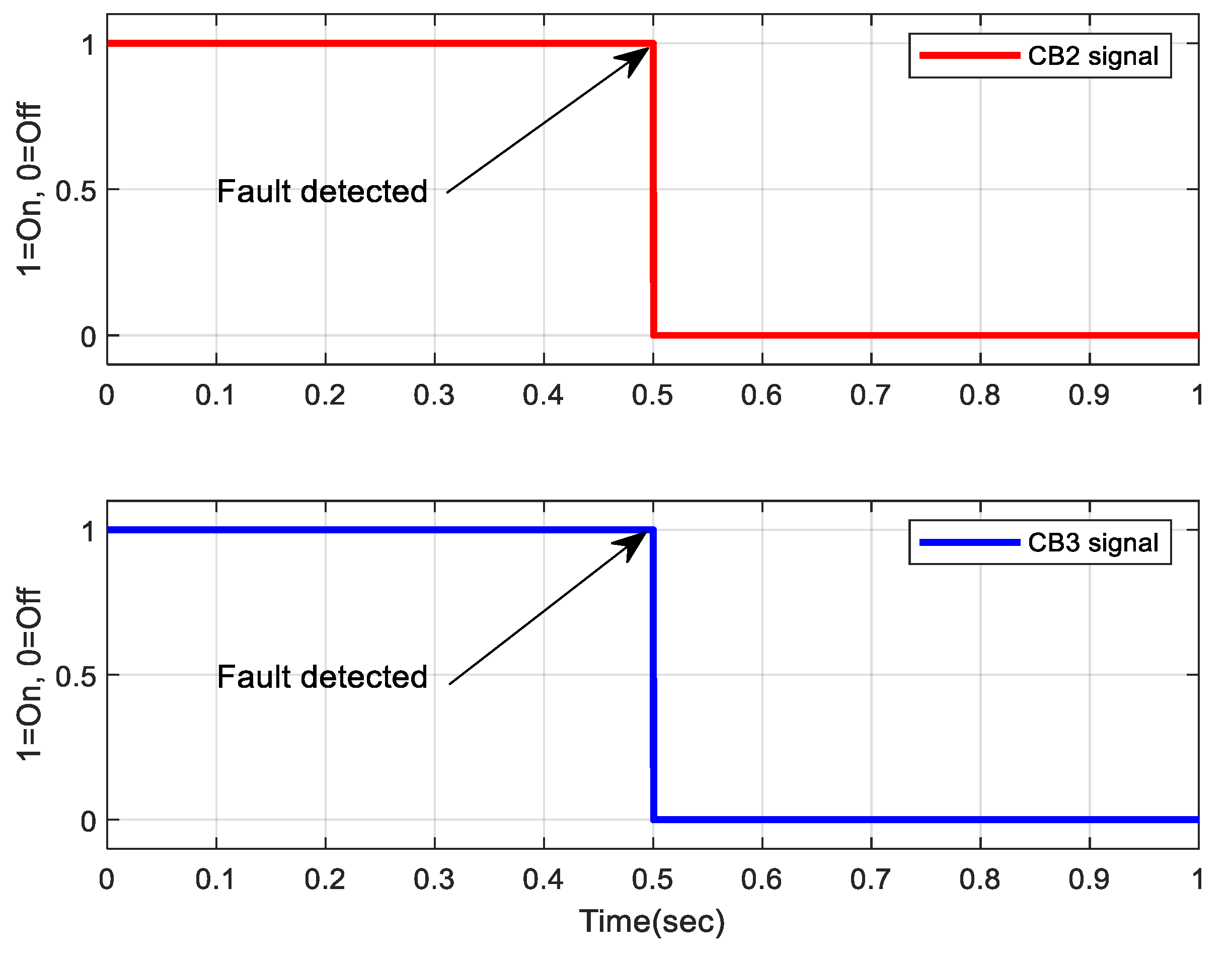
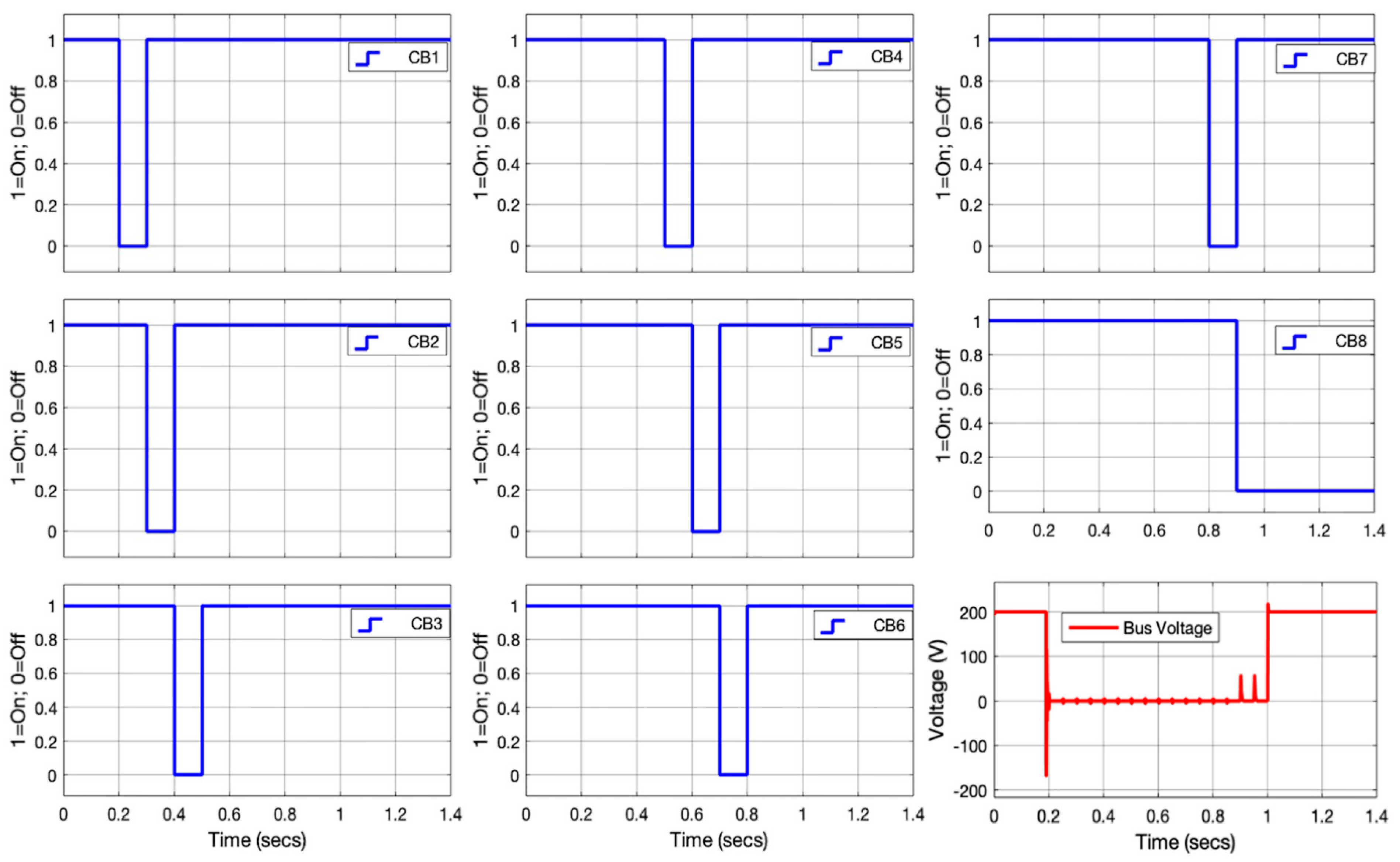
4.1. Bus Fault Searching by Operating Individual CBs in the Microgrid
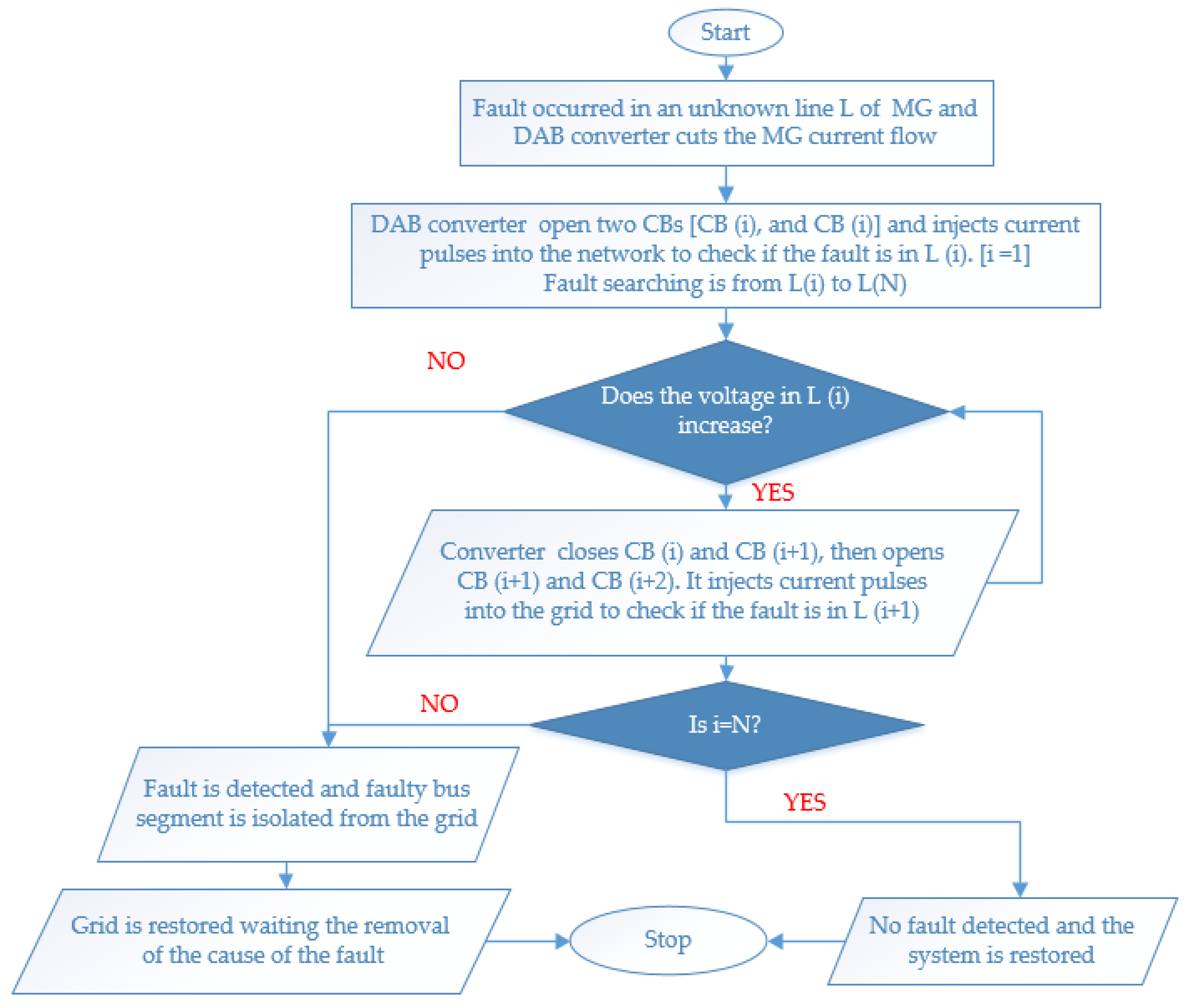
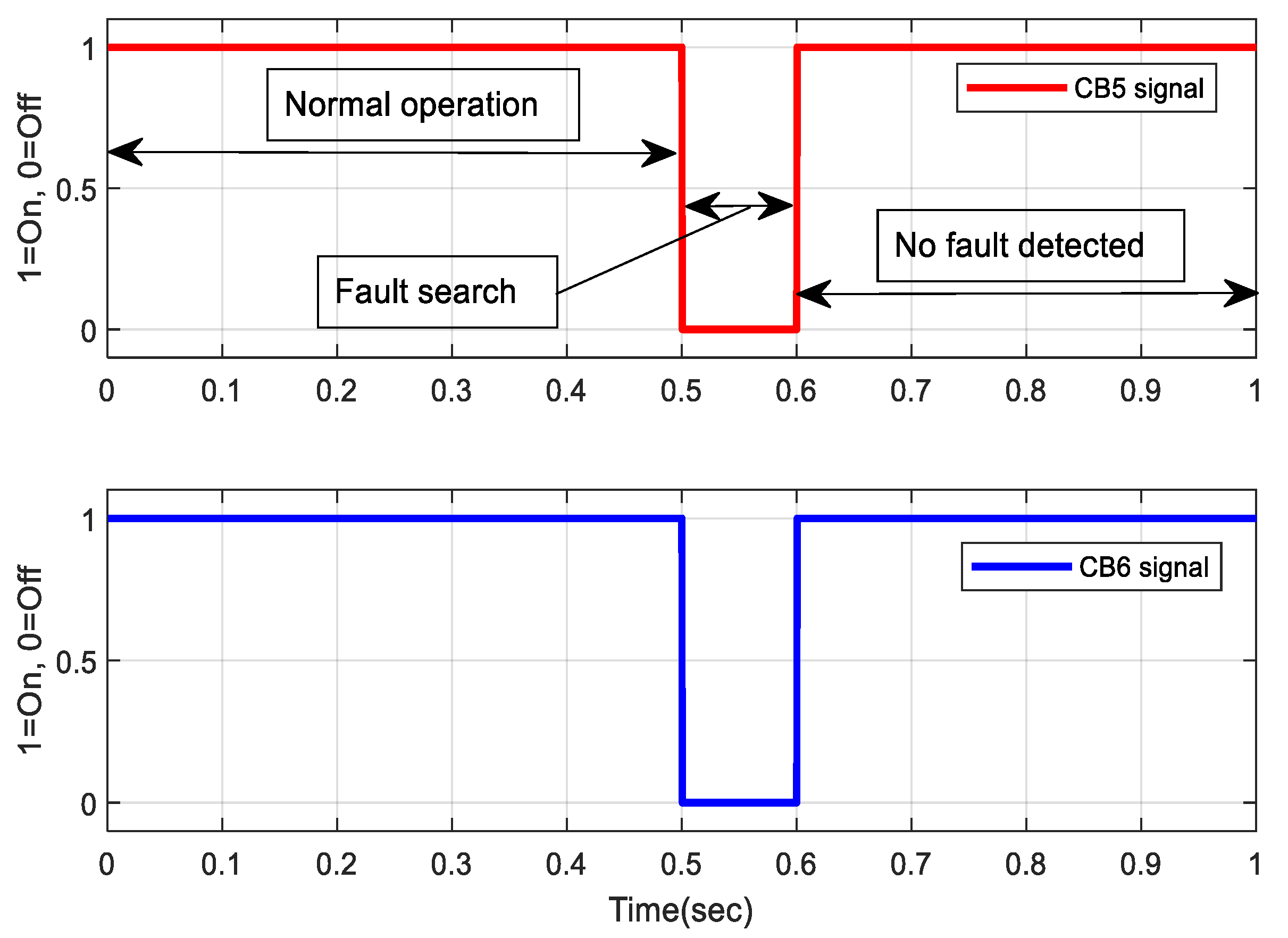
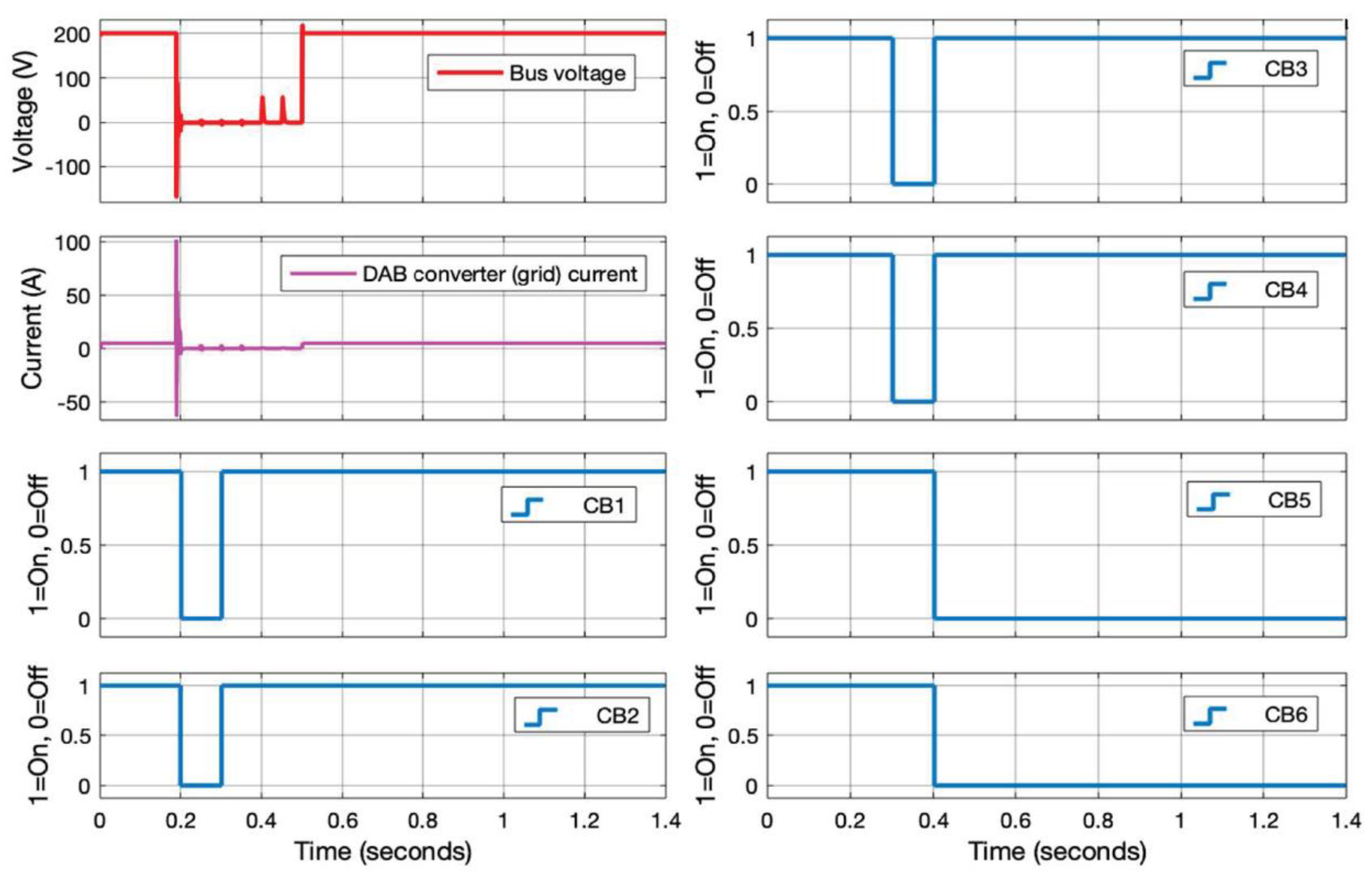
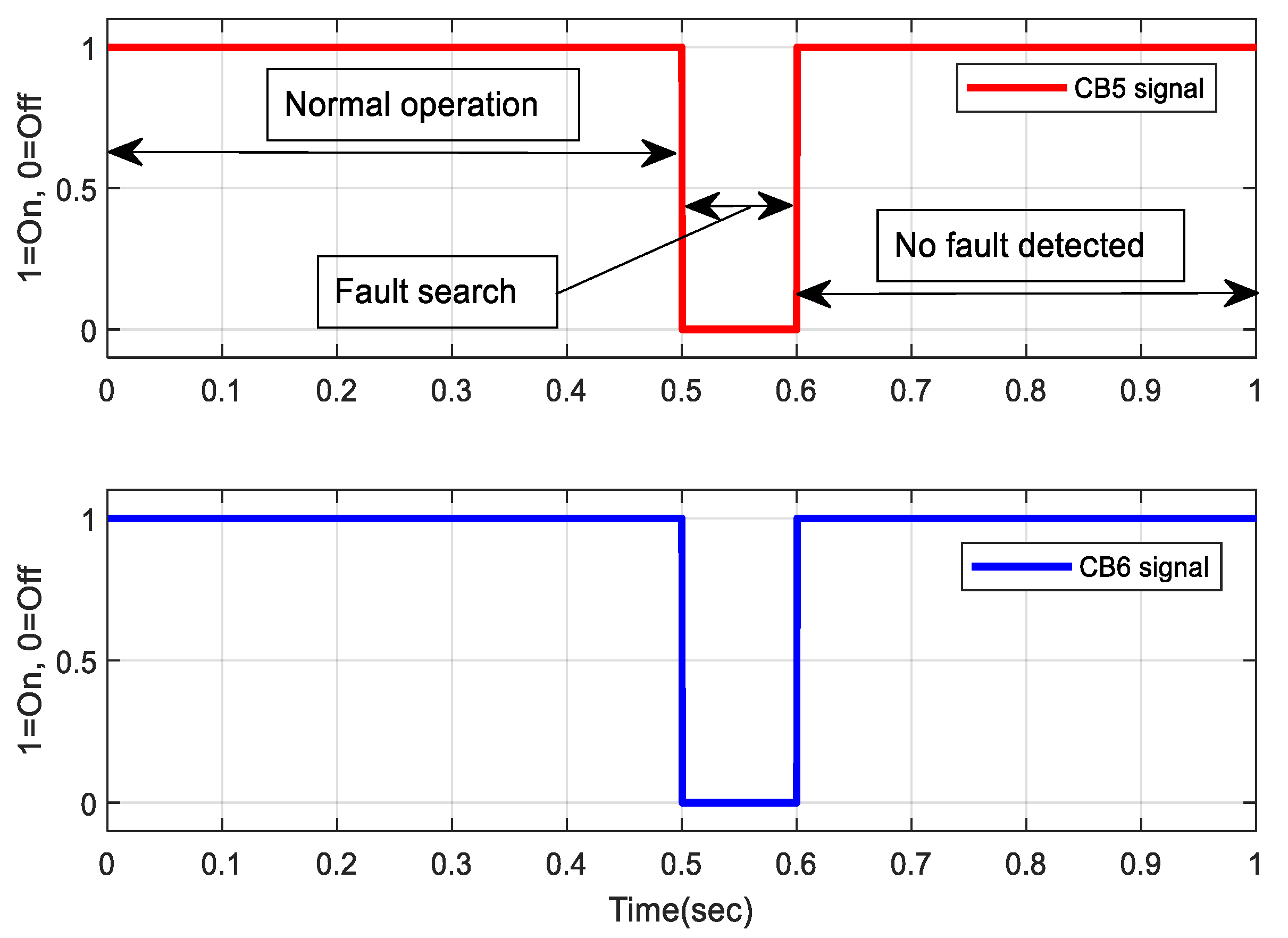
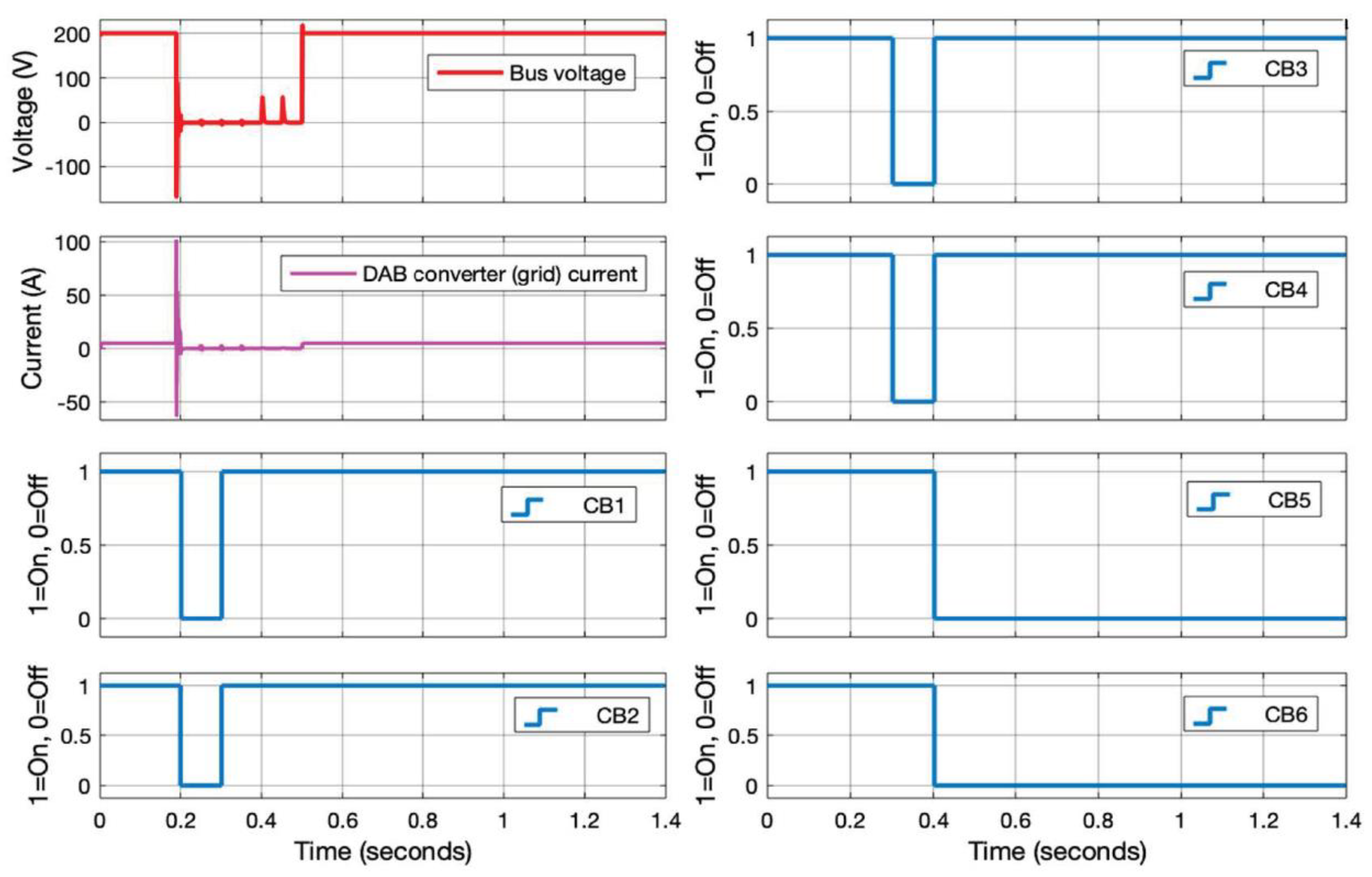
4.2. Line Fault Searching through the Two Nearby CBs across a Line
4.3. Analysis of Current under Normal and Fault Conditions
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclatures
| CB | Circuit breaker |
| DAB Dual | Active bidirectional (converter) |
| PPD | Power protective devices |
| ZCP | Zero-crossing point |
| ICM Main | Current (from DAB converter) |
| IC1 | Current in direction-1 |
| IC2 | Current in direction-2 |
| VLine | Line voltage |
| Vbus | Bus voltage |
| Vth | Threshold voltage |
| Ith | Threshold current |
| LVDC | Low-voltage direct current |
| MG | Microgrid |
| RENGA | Resilient Electricity Networks for a productive Grid Architecture |
References
- He, J.; Chen, K.; Li, M.; Luo, Y.; Liang, C.; Xu, Y. Review of protection and fault handling for a flexible DC grid. Prot. Control Mod. Power Syst. 2020, 5, 15. [Google Scholar] [CrossRef]
- Lin, Z.; Nengling, T.I.; Wentao, H.; Jian, L.; Yanhong, W. A review on protection of DC microgrids. J. Mod. Power Syst. Clean Energy 2018, 6, 1113–1127. [Google Scholar] [CrossRef] [Green Version]
- Thi, T.H.M. Evaluation of DC Supply Protection for Efficient Energy Delivery in Low Voltage Applications. Ph.D. Thesis, Universite de Lyon, Lyon, France, 2018. [Google Scholar]
- Wei-Chen, L.; Wei-Tzer, H.; Kai-Chao, Y.; Hong-Ting, C.; Chun-Chiang, M. Fault Location and Restoration of Microgrids via Particle Swarm Optimization. Appl. Sci. 2021, 11, 7036. [Google Scholar] [CrossRef]
- Sonia, M.; Manel, J.B.G.; Jihen, A.Z.; Ilhem, S.B. Residual-Based Fault Detection and Isolation in LVDC Microgrid; Elsevier Inc.: New York, NY, USA, 2022; pp. 1–24. [Google Scholar] [CrossRef]
- Siavash, B.; Robert, M.C.; Mojtaba, F.; Mehdi, S.; Guerrero, J.M. DC Microgrid protection: A Comprehensive Review. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 21, 1–25. [Google Scholar] [CrossRef]
- Yadav, N.; Tummuru, N.R. A Real-Time Resistance Based Fault Detection Technique for Zonal Type Low-Voltage DC Microgrid Applications. IEEE Trans. Ind. Appl. 2020, 56, 6815–6824. [Google Scholar] [CrossRef]
- Sheikh, A.A.; Wakode, S.A.R.; Deshmukh, R.; Ballal, M.S. A Protection Scheme for Fault Detection, Location and Isolation in DC Ring Microgrid. In Proceedings of the IECON 2019—45th Annual Conference of the IEEE Industrial Electronics Society, Lisbon, Portugal, 14–17 October 2019. [Google Scholar] [CrossRef]
- Sijo, A.; Jimmy, E.Q.; Matthew, J.R.; Sukumar, B. DC Microgrid Protection: Review and Challenges; Technical Report for Sandia National Laboratories: Albuquerque, NM, USA, 2018. [Google Scholar] [CrossRef]
- Meenakshisundaram, R.; Sivasakthi, S.; Vignesh, M. DC Ring-Bus Microgrid Fault Protection and Identification of Fault Location. Int. J. Technol. Res. Eng. 2015, 2, 2347–4718. [Google Scholar]
- Rajeev, K.C.; Kalpana, C. Smart protection system for identification and localisation of faults in multi-terminal DC microgrid. IET Smart Grid 2020, 3, 882–889. [Google Scholar] [CrossRef]
- Sohrab, M.; Xinzhou, D.; Shenxing, S.; Dimitrios, T. Challenges, Advances and Future Directions in Protection of Hybrid AC/DC Microgrids. IET Renew. Power Gener. 2017, 10, 79. [Google Scholar] [CrossRef] [Green Version]
- Behrooz, T.; Seyed, A.H. Detection of High Impedance Fault in DC Microgrid Using Impedance Prediction Technique. In Proceedings of the 15th International Conference on Protection and Automation of Power Systems (IPAPS), Shiraz, Iran, 30–31 January 2021; pp. 1–8. [Google Scholar]
- Nikhil, K.S.; Ruturaj, P.; Samantaray, S.R.; Bhende, C.N. A Fast Fault Detection Scheme for Low Voltage DC Microgrid. In Proceedings of the 21st National Power Systems Conference (NPSC), Gandhinagar, India, 29 January 2021; pp. 1–7. [Google Scholar] [CrossRef]
- Waqas, J.; Dong, C.; Mohamed, E.F.; Yan, X. System Configuration, Fault Detection, Location, Isolation and Restoration: A Review on LVDC Microgrid Protections. Energies 2019, 12, 1001. [Google Scholar] [CrossRef] [Green Version]
- Sumanth; Akash, S.; Sangeeta, M. Fault Analysis and Protection of DC Microgrid. Int. J. Eng. Res. Technol. IJERT 2020, 8, 122–126. [Google Scholar]
- Liang, K.; Heng, N. Transient Modeling Method for Faulty DC Microgrid Considering Control Effect of DC/AC and DC/DC Converters. IEEE Access 2020, 8, 150759–150772. [Google Scholar] [CrossRef]
- Deshmukh, R.R.; Ballal, M.S.; Suryawanshi, H.M.; Mishra, M.K. An Adaptive Approach for Effective Power Management in DC Microgrid Based on Virtual Generation in Distributed Energy Sources. IEEE Trans. Ind. Inform. 2020, 16, 362–372. [Google Scholar] [CrossRef]
- Hategekimana, P.; Rodriguez-Bernuz, J.M.; Junyent-Ferre, A.; Ntagwirumugara, E. Assessment of Feasible DC Microgrid Network Topologies for Rural Electrification in Rwanda: Studying the Kagoma Village. In Proceedings of the 2020 International Conference on Smart Grids and Energy Systems (SGES), Perth, Australia, 23–26 November 2020; pp. 854–859. [Google Scholar] [CrossRef]
- Chetan, S.; Manoj, T. DC microgrid protection issues and schemes: A critical review. Renew. Sustain. Energy Rev. 2021, 151, 111546. [Google Scholar] [CrossRef]
- Gururajapathy, S.S.; Mokhlis, H.; Illias, H.A. Fault Location and Detection Techniques in Power Distribution Systems with Distributed Generation: A Review; Elsevier: Berlin, Germany, 2017; Volume 74, pp. 949–958. [Google Scholar] [CrossRef]
- Ming, Y.; Wang, Y.; Zhang, L.; Ziguang, Z. DC short circuit fault analysis and protection of ring type DC microgrid. In Proceedings of the IEEE 8th International Power Electronics and Motion Control Conference (IPEMC-ECCE Asia), Hefei, China, 22–26 May 2016; pp. 1694–1700. [Google Scholar] [CrossRef]
- Anselmo, I.S.; Rashid, M.H. Solid-State Circuit Breakers for D.C. Microgrid Applications. In Proceedings of the International Conference on Electrical, Communication, and Computer Engineering (ICECCE), Istanbul, Turkey, 12–13 June 2020; pp. 1–4. [Google Scholar] [CrossRef]
- Pate, P.; Kamal, S.; Pate, P. New Scheme of Protection for LVDC Bus Microgrid System. Cikitusi J. Multidiscip. Res. 2018, 7, 53–60. [Google Scholar]
- Ibrahim, A.; Marwan, A. Fault Diagnosis Based Approach to Protecting DC Microgrid Using Machine Learning Technique. Procedia Comput. Sci. 2017, 114, 449–456. [Google Scholar] [CrossRef]
- Mohammad, A.; Yaqobi, H.M.; Mir, S.S.D.; Mohammed, E.L.; Abdul, M.H.; Senjyu, T. Low-Voltage Solid-State DC Breaker for Fault Protection Applications in Isolated DC Microgrid Cluster. Appl. Sci. 2019, 9, 723. [Google Scholar] [CrossRef] [Green Version]
- Noor, H.; Mashood, N.; Juan, C.V.; Guerrero, J.M. Recent Developments and Challenges on AC Microgrids Fault Detection and Protection Systems–A Review. Energies 2020, 13, 2149. [Google Scholar] [CrossRef]
- Wu, P.; Huang, W.; Tai, N.; Liang, S. A novel design of architecture and control for multiple microgrids with hybrid AC/DC connection. Appl. Energy 2018, 74, 1002–1016. [Google Scholar] [CrossRef]
- Sharthak, M.; Juan, C.B. Short-Circuit Protection for Low-Voltage DC Microgrids Based on Solid-State Circuit Breakers. In Proceedings of the IEEE IEEE 7th International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Vancouver, BC, Canada, 27–30 June 2016. [Google Scholar] [CrossRef]
- Dionne, S.; Mike, S.; Harsha, R.; Mischa, S. Advances to megawatt scale demonstrations of high speed fault clearing and power restoration in breakerless MVDC shipboard power systems. In Proceedings of the IEEE Electric Ship Technologies Symposium (ESTS), Arlington, VA, USA, 14–17 August 2017; pp. 312–315. [Google Scholar] [CrossRef]
- Ankan, C.; Singh, G.K.; Vinay, P. Protection techniques for DC microgrid—A review. Electr. Power Syst. Res. 2020, 187, 106439. [Google Scholar] [CrossRef]
- Sheikh, A.A.; Wakode, S.A.; Deshmukh, R.R.; Ballal, M.S.; Suryawanshi, H.M.; Mishra, M.K.; Kumar, S. A Brief Review on DC Microgrid Protection. In Proceedings of the 2020 IEEE First International Conference on Smart Technologies for Power, Energy and Control (STPEC), Nagpur, India, 25–26 September 2020; pp. 1–7. [Google Scholar] [CrossRef]
- Anju, M.; Saikat, C.; Srivastava, S.C. An On-line Fault Location Technique for DC Microgrid Using Transient Measurements. In Proceedings of the 7th International Conference on Power Systems (ICPS), Pune, India, 21–23 December 2017; pp. 386–391. [Google Scholar] [CrossRef]
- Bayati, N.; Baghaee, H.R.; Hajizadeh, A.; Soltani, M.; Lin, Z.; Savaghebi, M. Local Fault Location in Meshed DC Microgrids based on Parameter Estimation Technique. IEEE Syst. J. 2021, 16, 1606–1615. [Google Scholar] [CrossRef]
- Anju, M.; Suresh, C.S.; Saikat, C. Local measurement-based technique for estimating fault location in multi-source DC microgrids. IET Gener. Transm. Distrib. 2018, 12, 3305–3313. [Google Scholar] [CrossRef]
- Sangit, S.; Abhinav, B.; Elangovan, D.; Arunkumar, G. DC Microgrid System for Rural Electrification. In Proceedings of the International Conference on Energy, Communication, Data Analytics and Soft Computing (ICECDS), Chennai, India, 1–2 August 2017; pp. 307–317. [Google Scholar]
- Vinogradov, A.; Vinogradova, A.; Bolshev, V. Analysis of the Major Constituents of the Power Supply System Efficiency for Rural Consumers. IETE J. Res. 2020, 17, 1–10. [Google Scholar] [CrossRef]
- Luis, E.Z. Are Microgrids the Future of Energy? DC microgrids from concept to demonstration to deployment. EE Electrif. Mag. 2016, 14, 37–44. [Google Scholar] [CrossRef]
- Vinny, M.; Pitshou, N.B.; Moses, O.O. A Review of Microgrid-Based Approach to Rural Electrification in South Africa: Architecture and Policy Framework. Energies 2020, 13, 2193. [Google Scholar] [CrossRef]
- Chengwei, L.; Rodriguez-Bernuz, J.M.; Junyent-Ferre, A. A low-cost and efficient fault detection and location algorithm for LVDC microgrid. In Proceedings of the IEEE 22nd Workshop on Control and Modeling for Power Electronics (COMPEL), Cartagena, Colombia, Online Conference, 2–5 November 2021. [Google Scholar] [CrossRef]
- Rodriguez-Bernuz, J.M.; Junyent-Ferré, A.; Xin, X. Optimal Droop Offset Adjustments for Accurate Energy Trading in Rural DC Mini-Grid Clusters. In Proceedings of the 2020 International Conference on Smart Grids and Energy Systems (SGES), Perth, Australia, 23–26 November 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Somasekar, K.; Mathumathi, T.; Anand, K. Fault detection in dc microgrid system. Int. J. Adv. Manag. Technol. Eng. Sci. 2017, 7, 245–257. [Google Scholar]
- Power Stream Technology. Wire Gauge and Current Limits Including Skin Depth and Strength. 23 April 2021. Available online: https://www.powerstream.com/Wire_Size.htm (accessed on 3 October 2021).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System Component | Rating |
|---|---|
| Converter nominal voltage at HVS (Vth) | 200 V |
| Converter rated current at HVS (Ith) | 5 A |
| Rated power | 1000 W |
| Frequency of operation | 100 kHz |
| Line resistance | 0.81508 mΩ/m |
| Line inductance | 0.1 mH/m |
| Length of grid cable | 500 m |
| Converter low-voltage side | 48 V |
| Converter capacitor | 50 µF |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hategekimana, P.; Ferre, A.J.; Bernuz, J.M.R.; Ntagwirumugara, E. Fault Detecting and Isolating Schemes in a Low-Voltage DC Microgrid Network from a Remote Village. Energies 2022, 15, 4460. https://doi.org/10.3390/en15124460
Hategekimana P, Ferre AJ, Bernuz JMR, Ntagwirumugara E. Fault Detecting and Isolating Schemes in a Low-Voltage DC Microgrid Network from a Remote Village. Energies. 2022; 15(12):4460. https://doi.org/10.3390/en15124460
Chicago/Turabian StyleHategekimana, Pascal, Adria Junyent Ferre, Joan Marc Rodriguez Bernuz, and Etienne Ntagwirumugara. 2022. "Fault Detecting and Isolating Schemes in a Low-Voltage DC Microgrid Network from a Remote Village" Energies 15, no. 12: 4460. https://doi.org/10.3390/en15124460
APA StyleHategekimana, P., Ferre, A. J., Bernuz, J. M. R., & Ntagwirumugara, E. (2022). Fault Detecting and Isolating Schemes in a Low-Voltage DC Microgrid Network from a Remote Village. Energies, 15(12), 4460. https://doi.org/10.3390/en15124460