
Grid-Connected Power Converters: An Overview of Control Strategies for Renewable Energy

 ,
,  and
and 
Abstract
:1. Introduction
2. Control of Solar Photovoltaic Farms
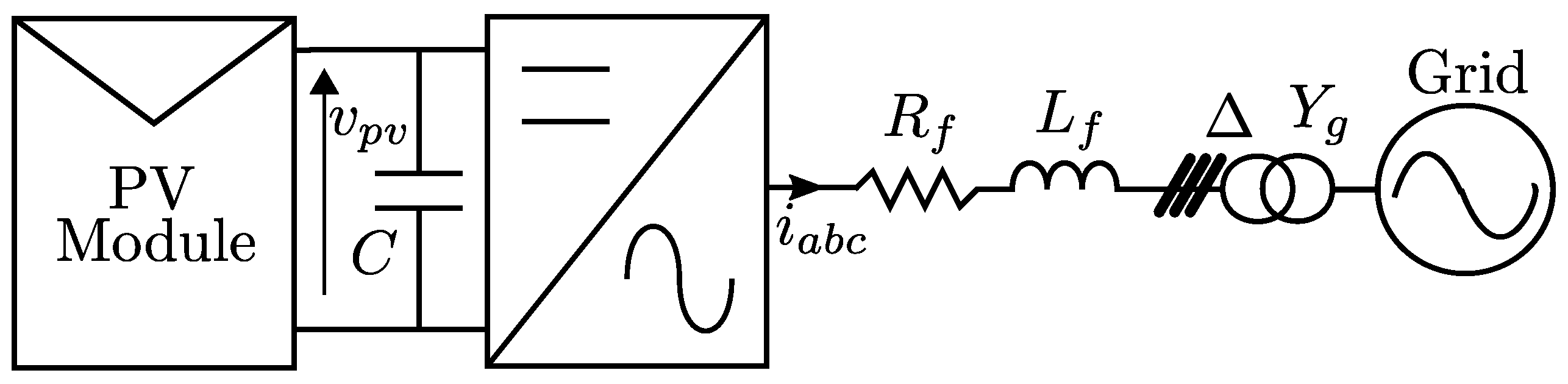
2.1. Characteristics and Connection Topologies of PV Farms
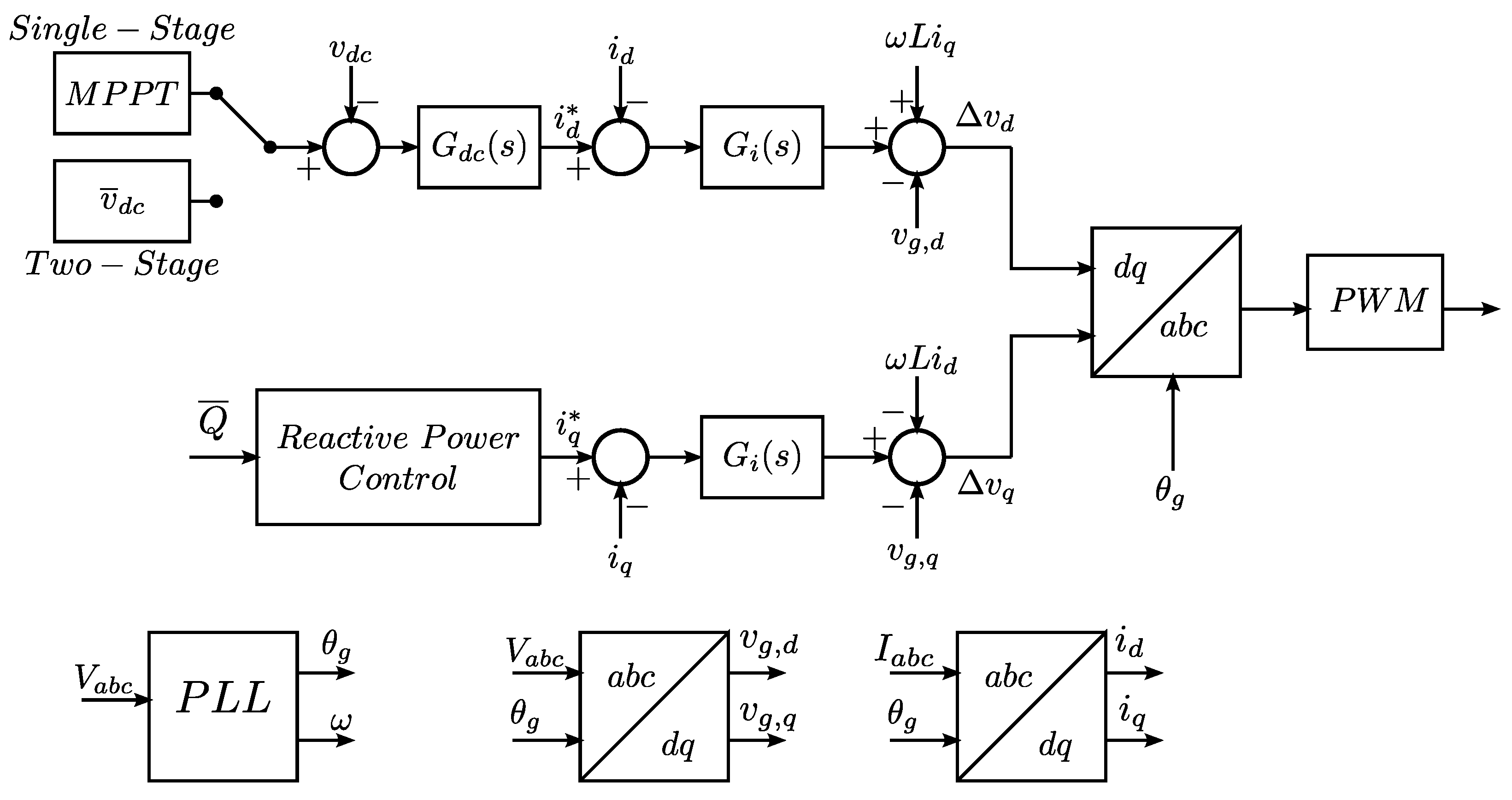
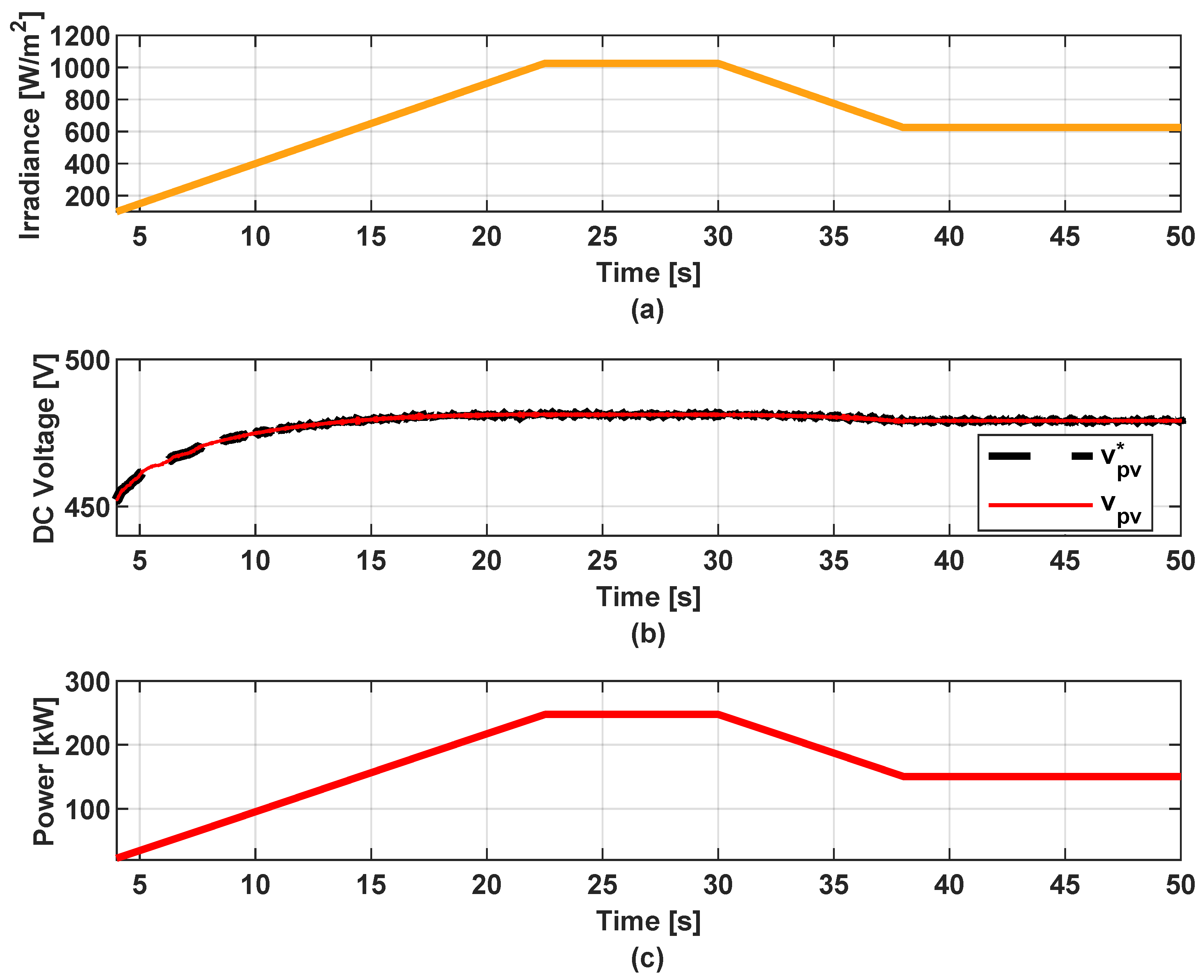
2.2. Control of DC/AC Converters for PV Applications
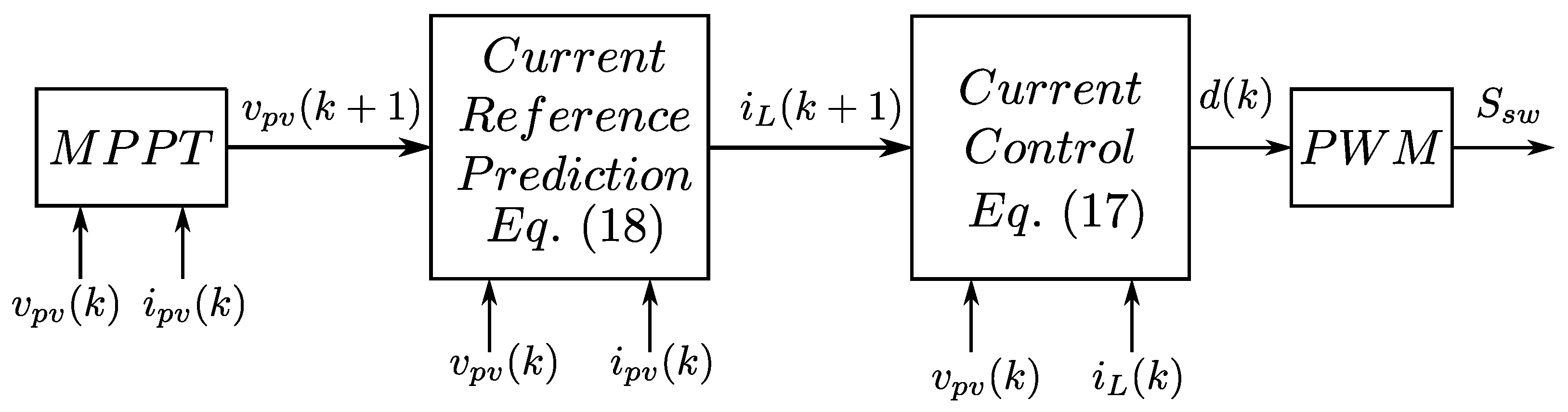
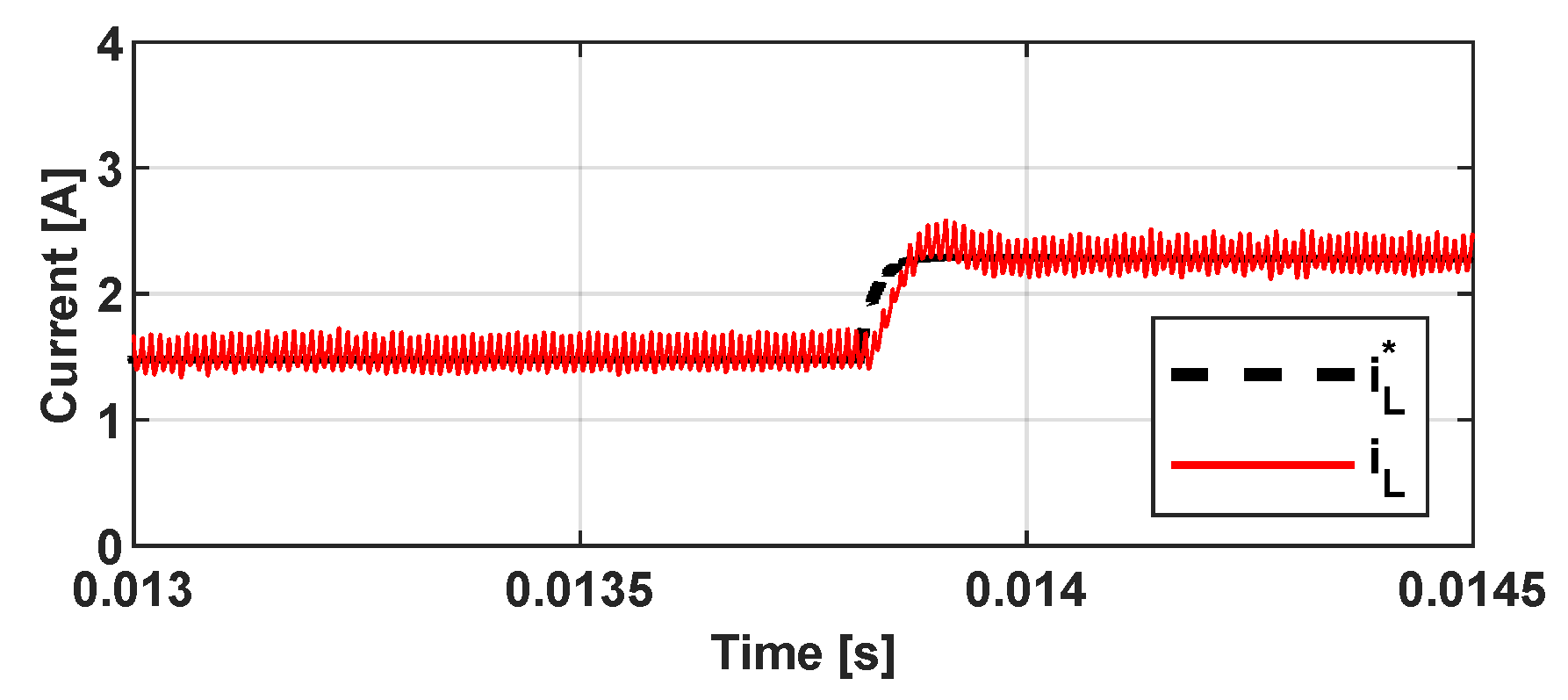
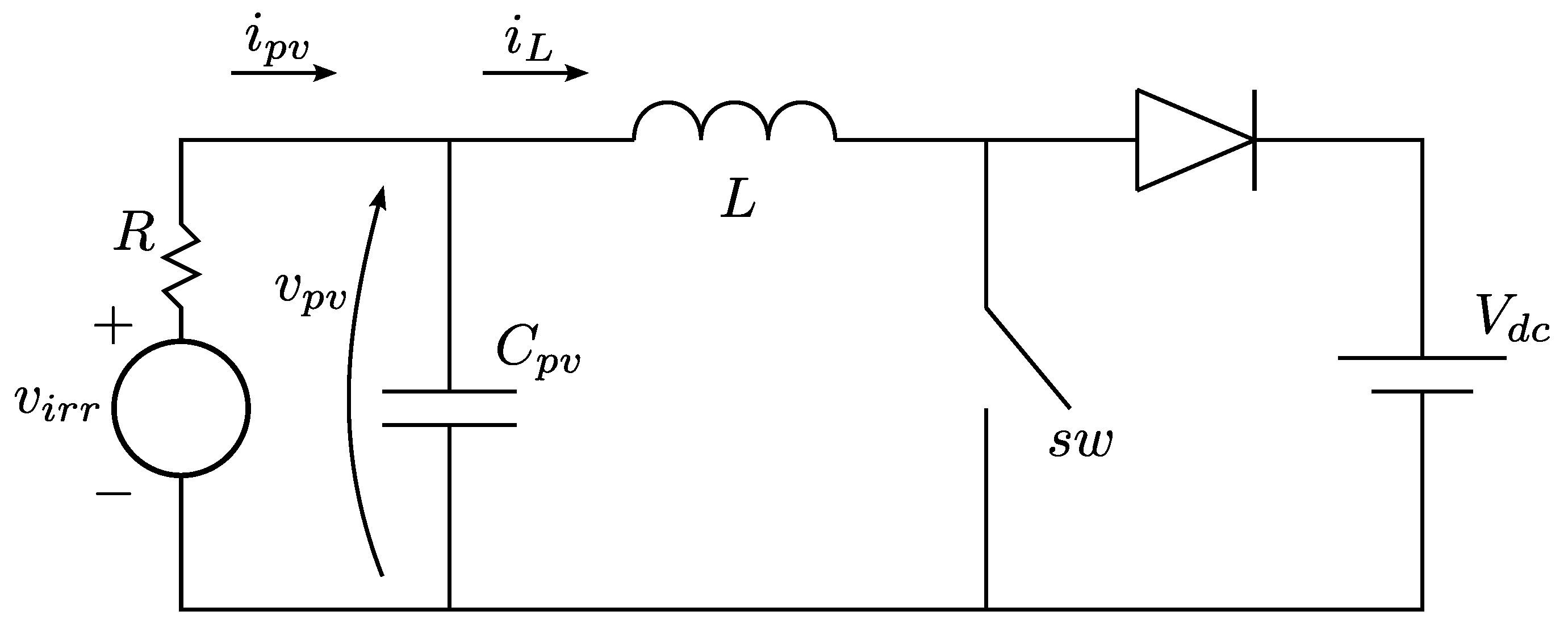
2.3. Control of DC/DC Converters for PV Applications
3. Control of Doubly Fed Induction Generator-Based Wind Turbines
3.1. DFIG’s Mathematical Model in the Synchronous Frame (dq)
3.2. Stator Flux-Oriented System
3.3. State Space Model
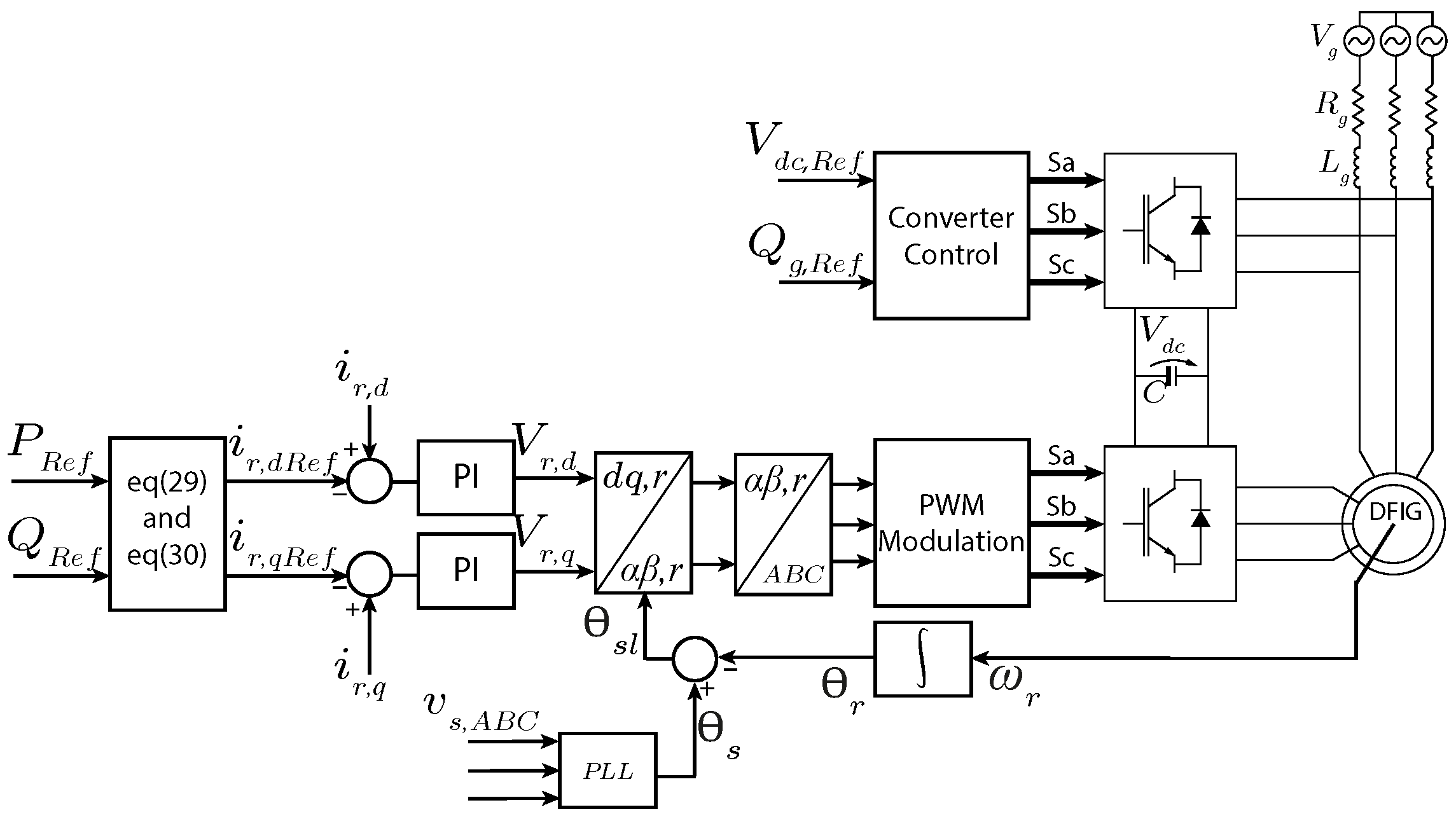
3.4. Proportional Integral Control for DFIG
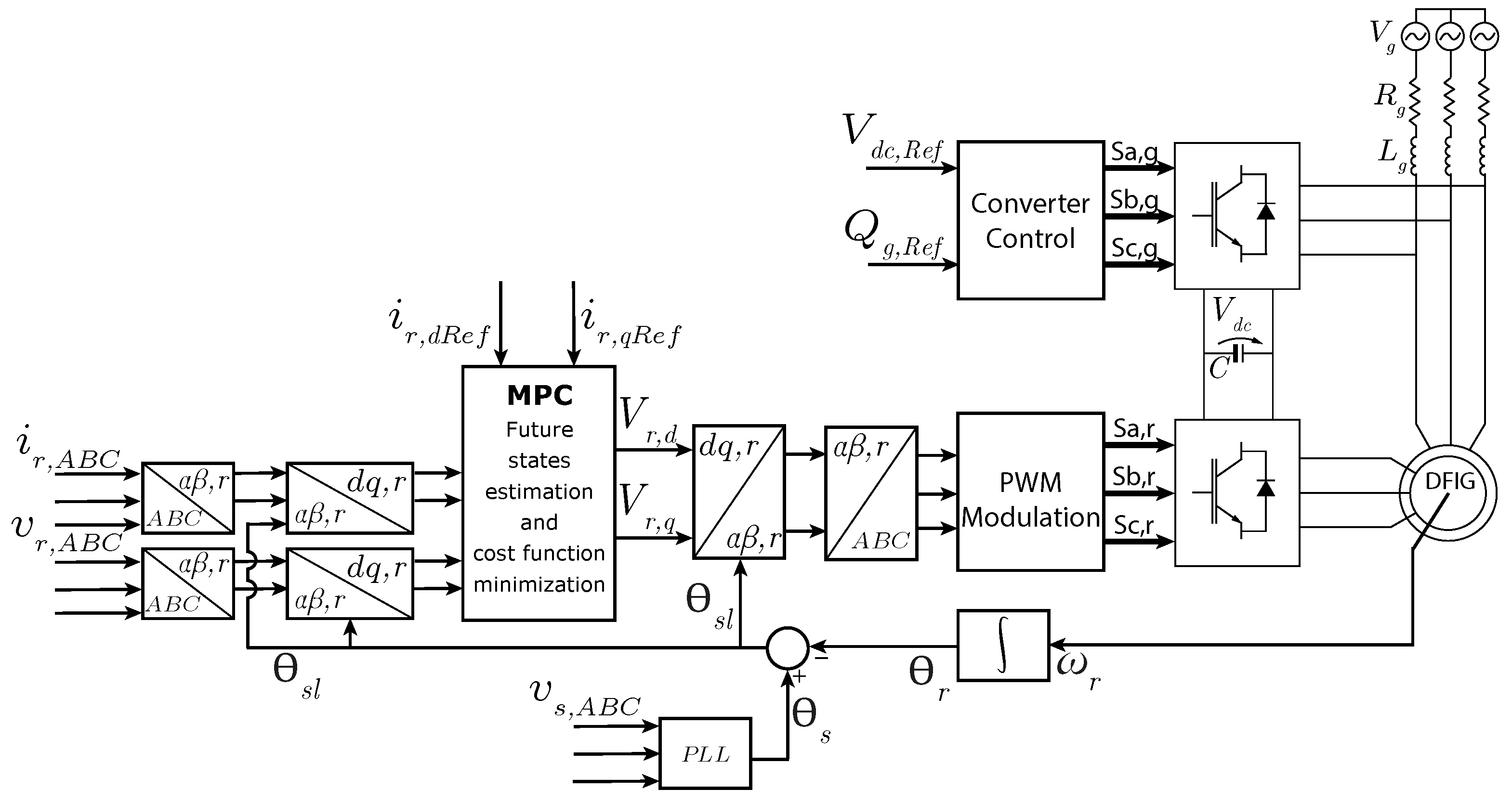
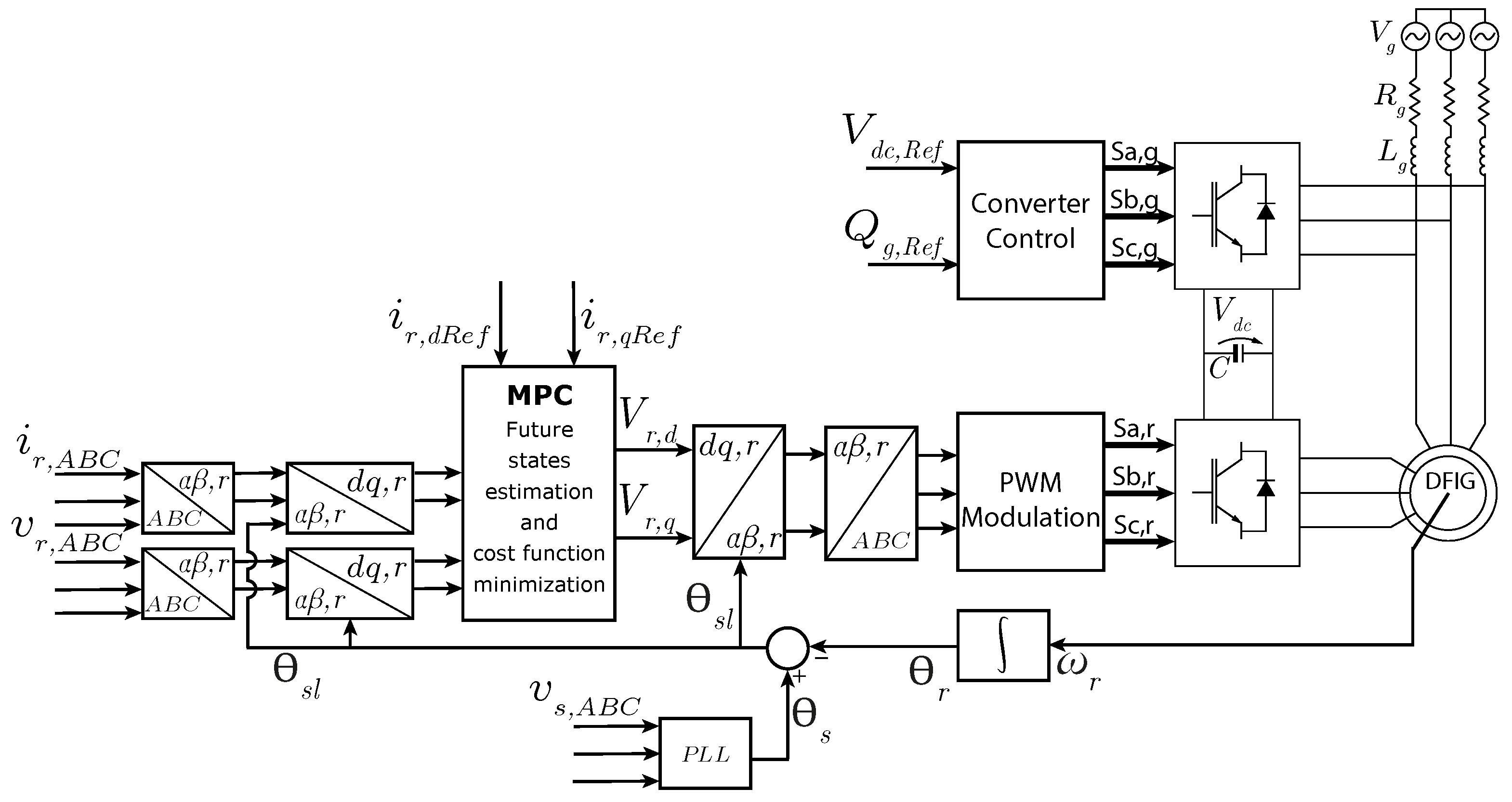
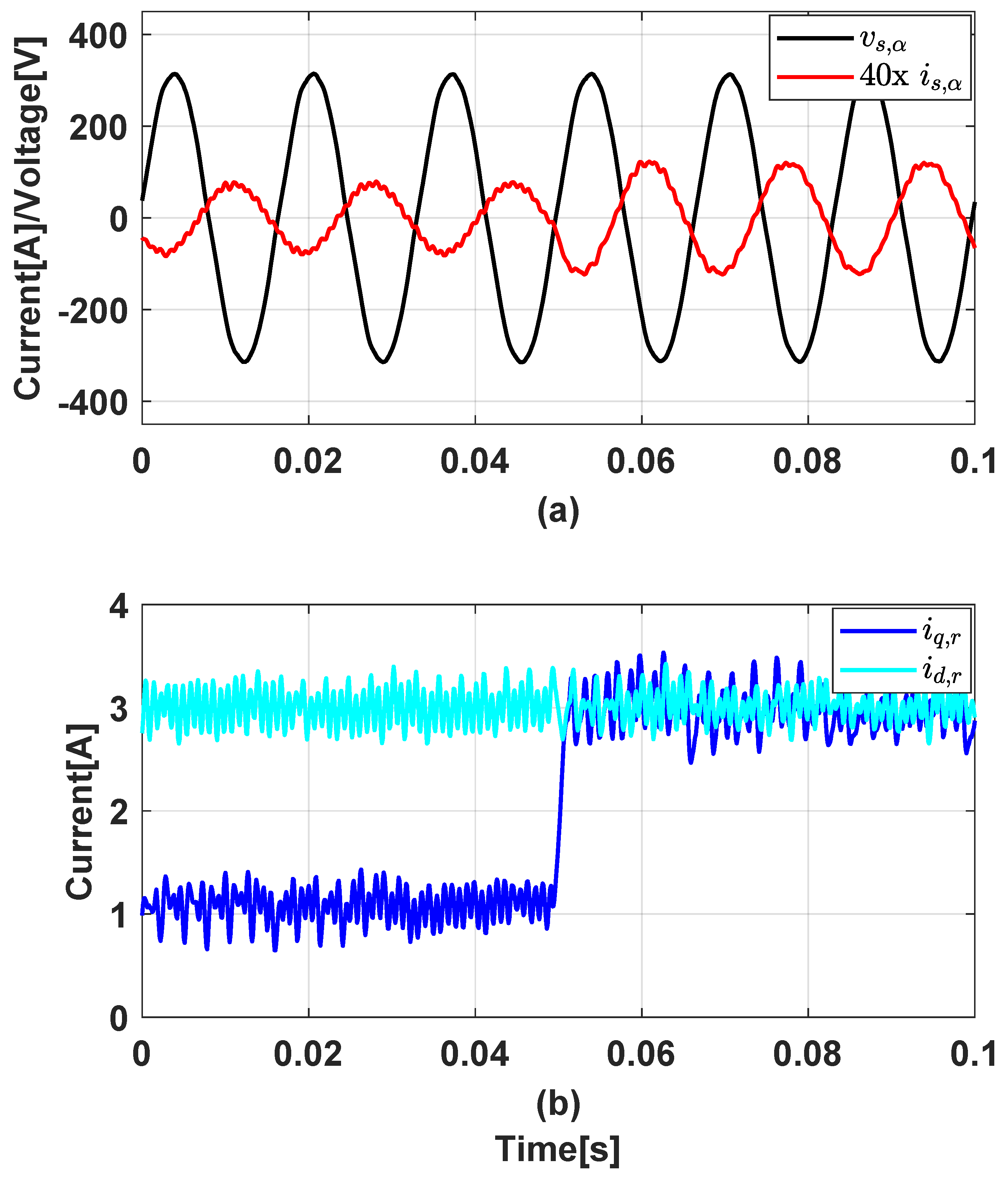
3.5. Model Predictive Control for the DFIG
4. Control of Grid-Connected Energy Storage Devices and Electric Vehicles
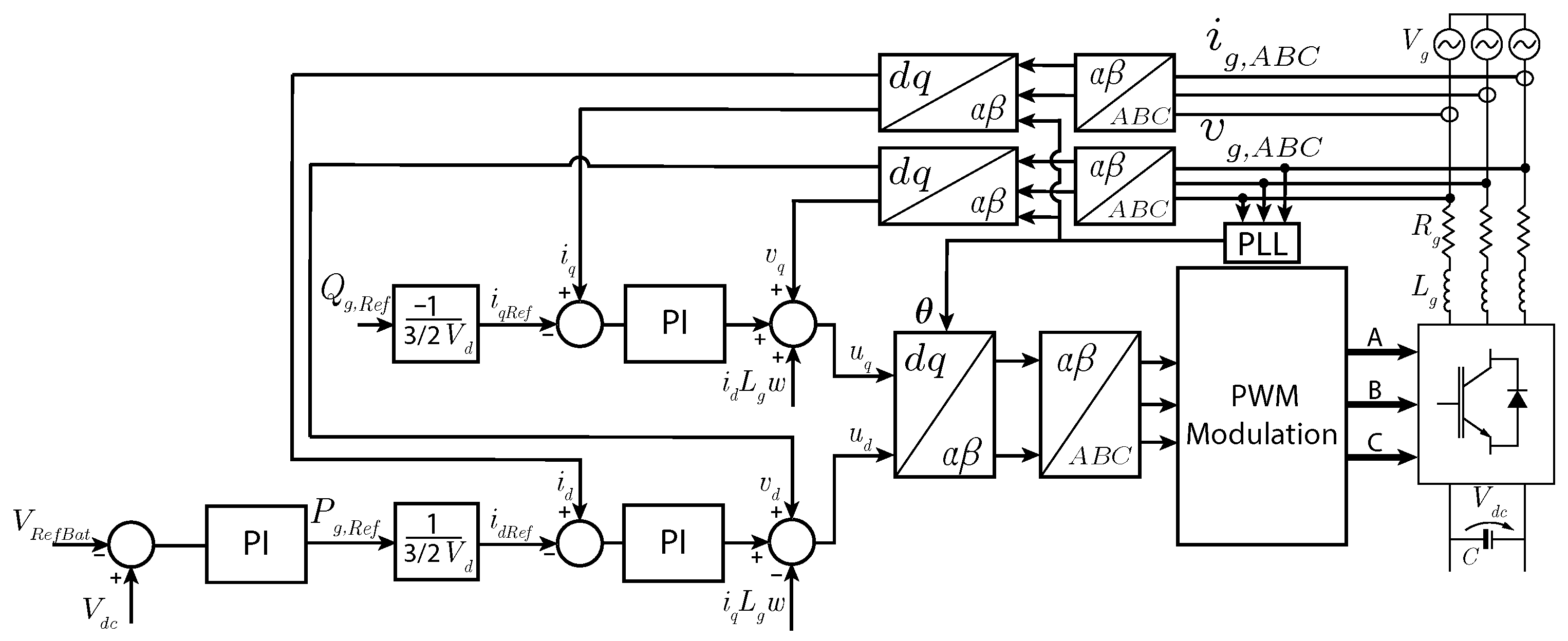
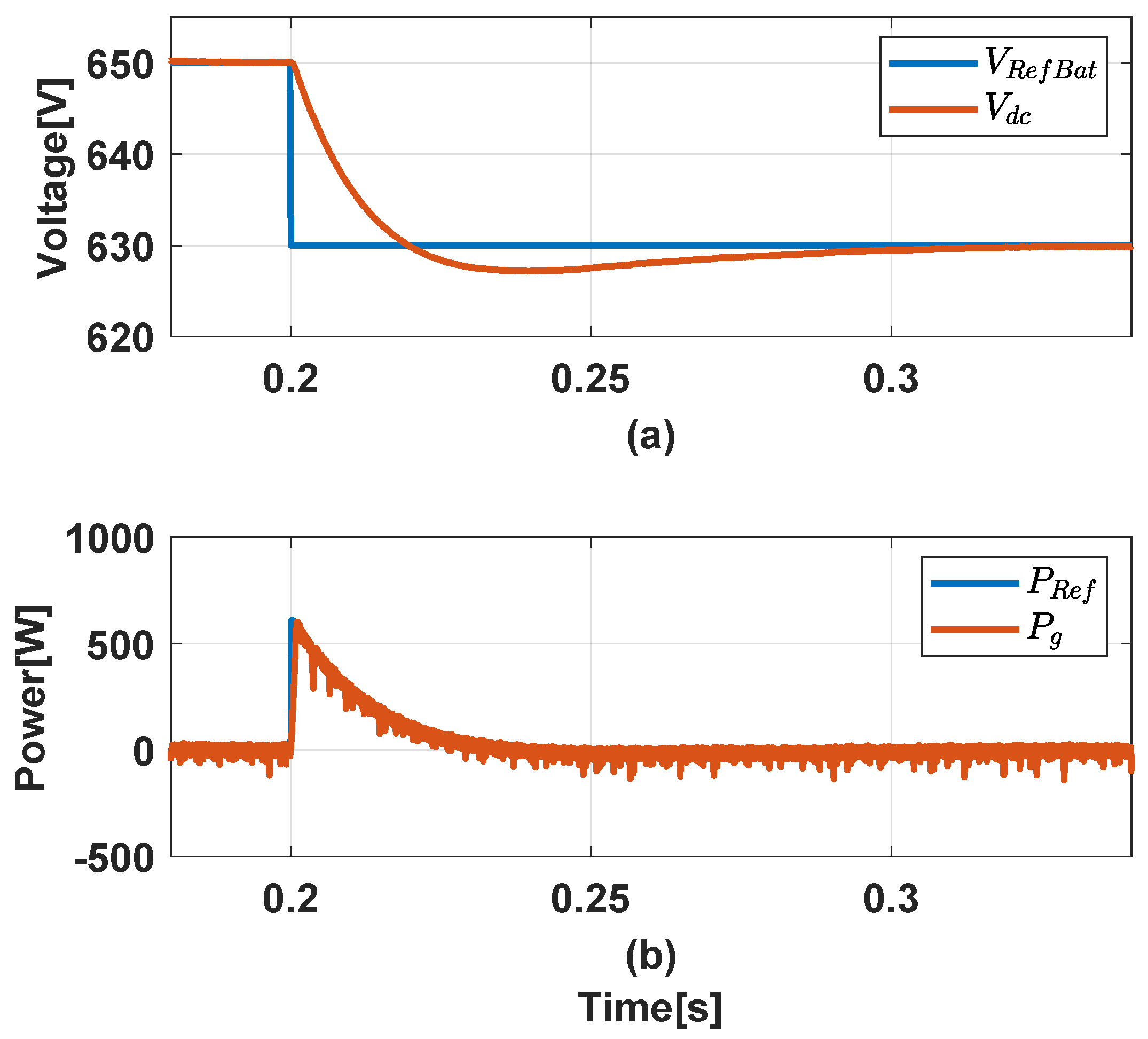
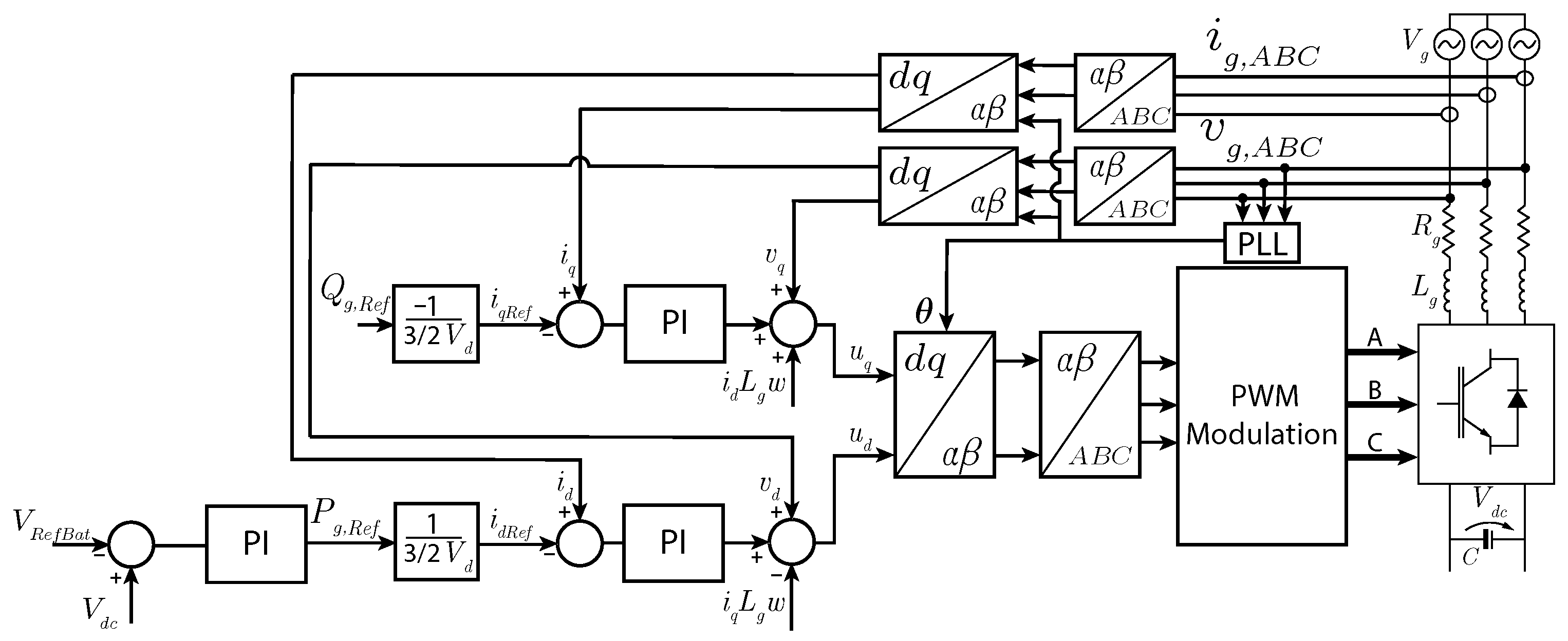
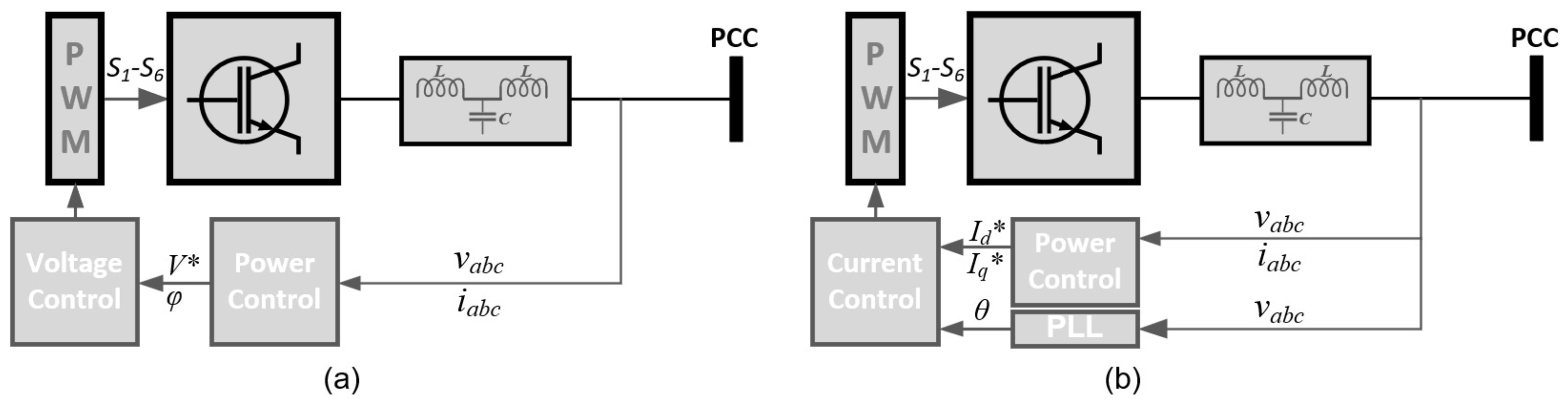
4.1. Proportional Integral Control for Storage
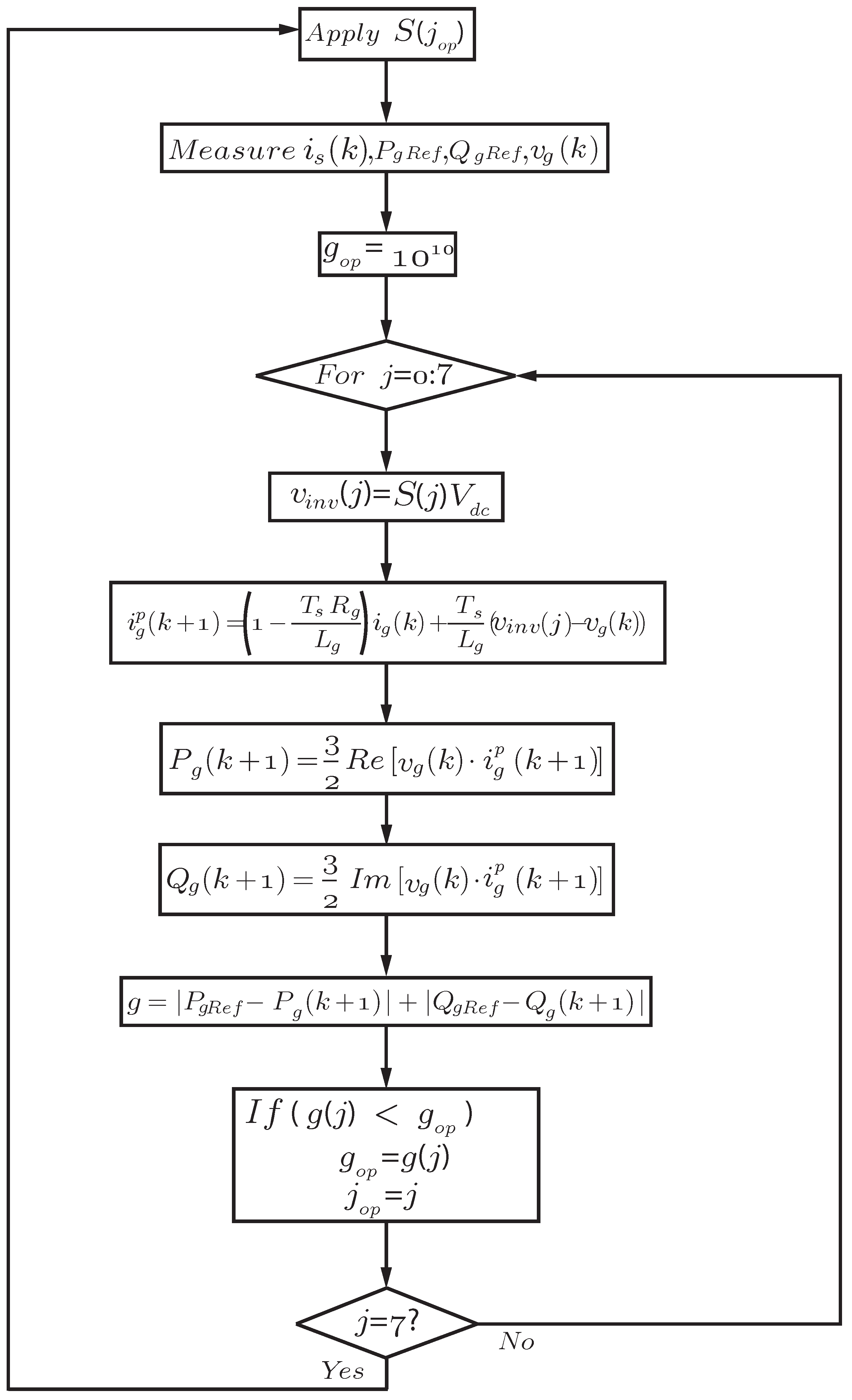
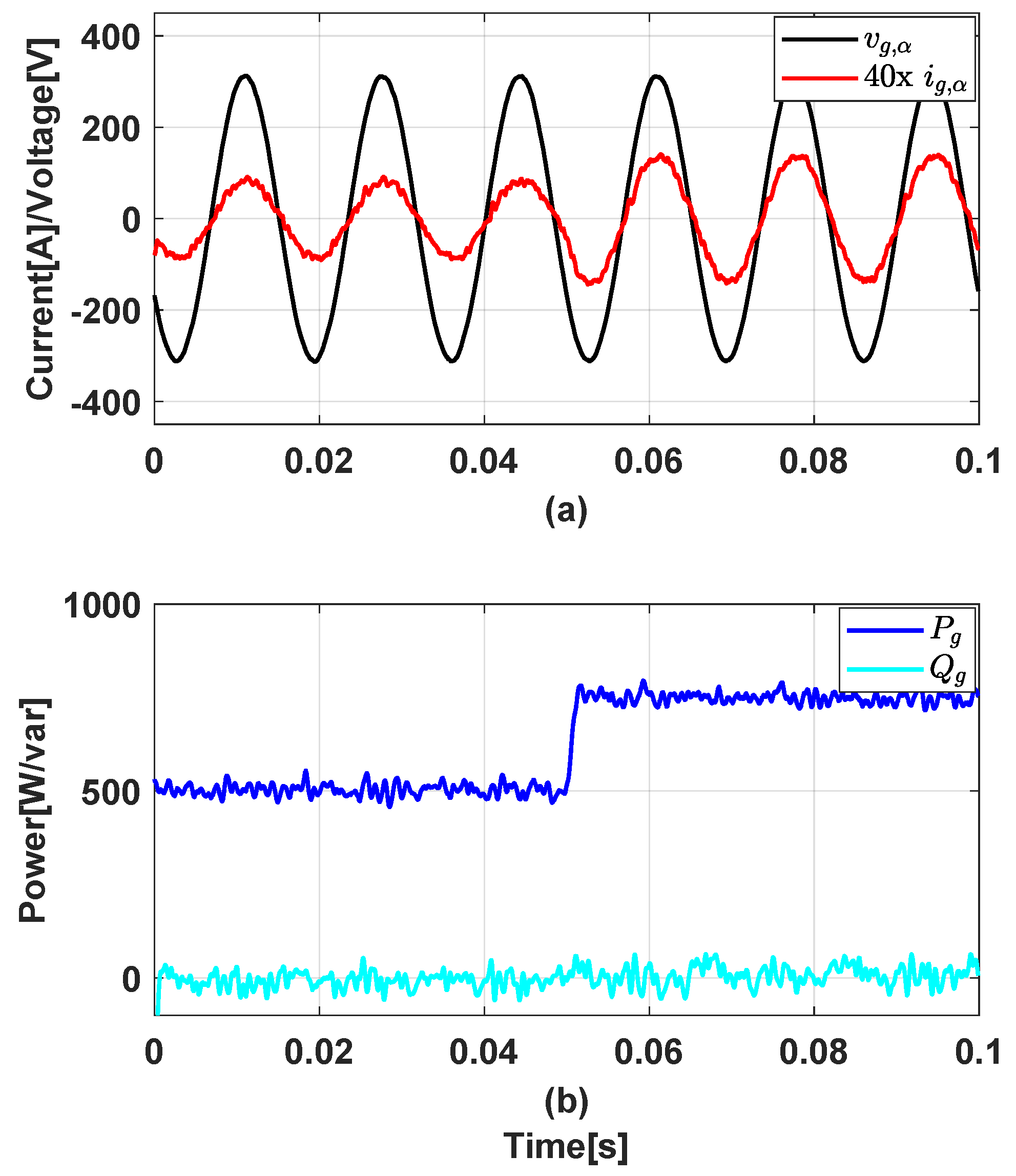
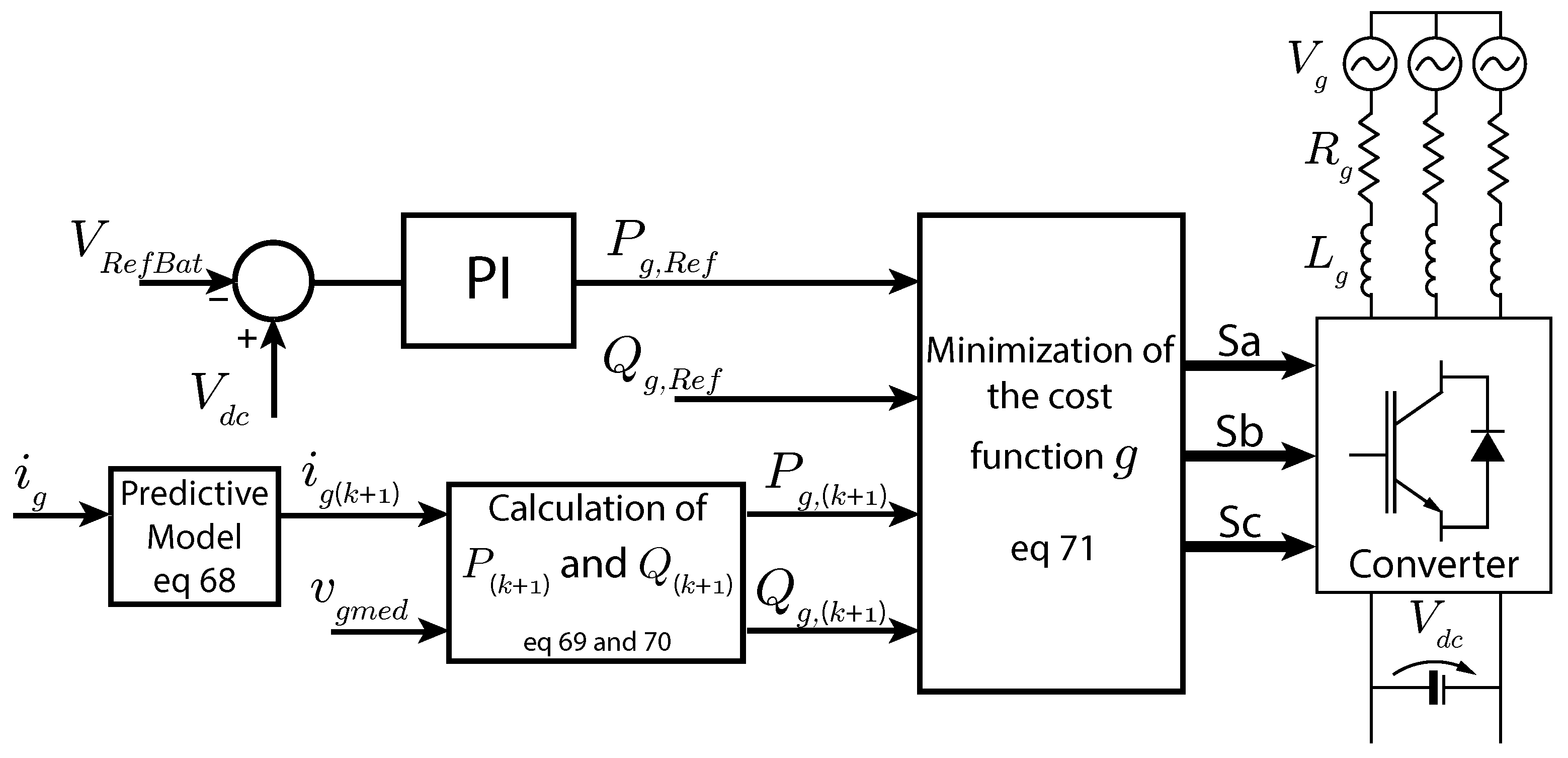
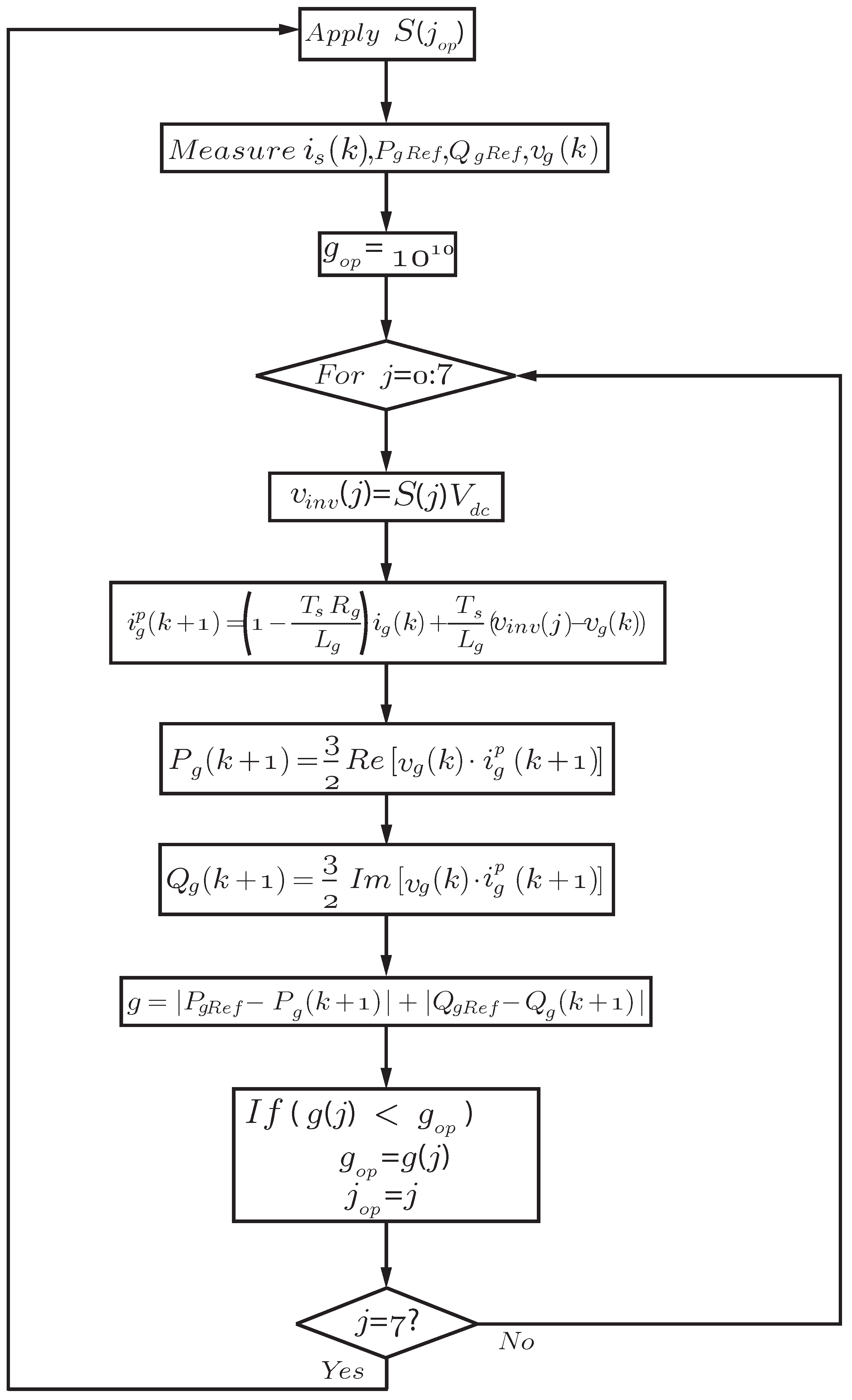
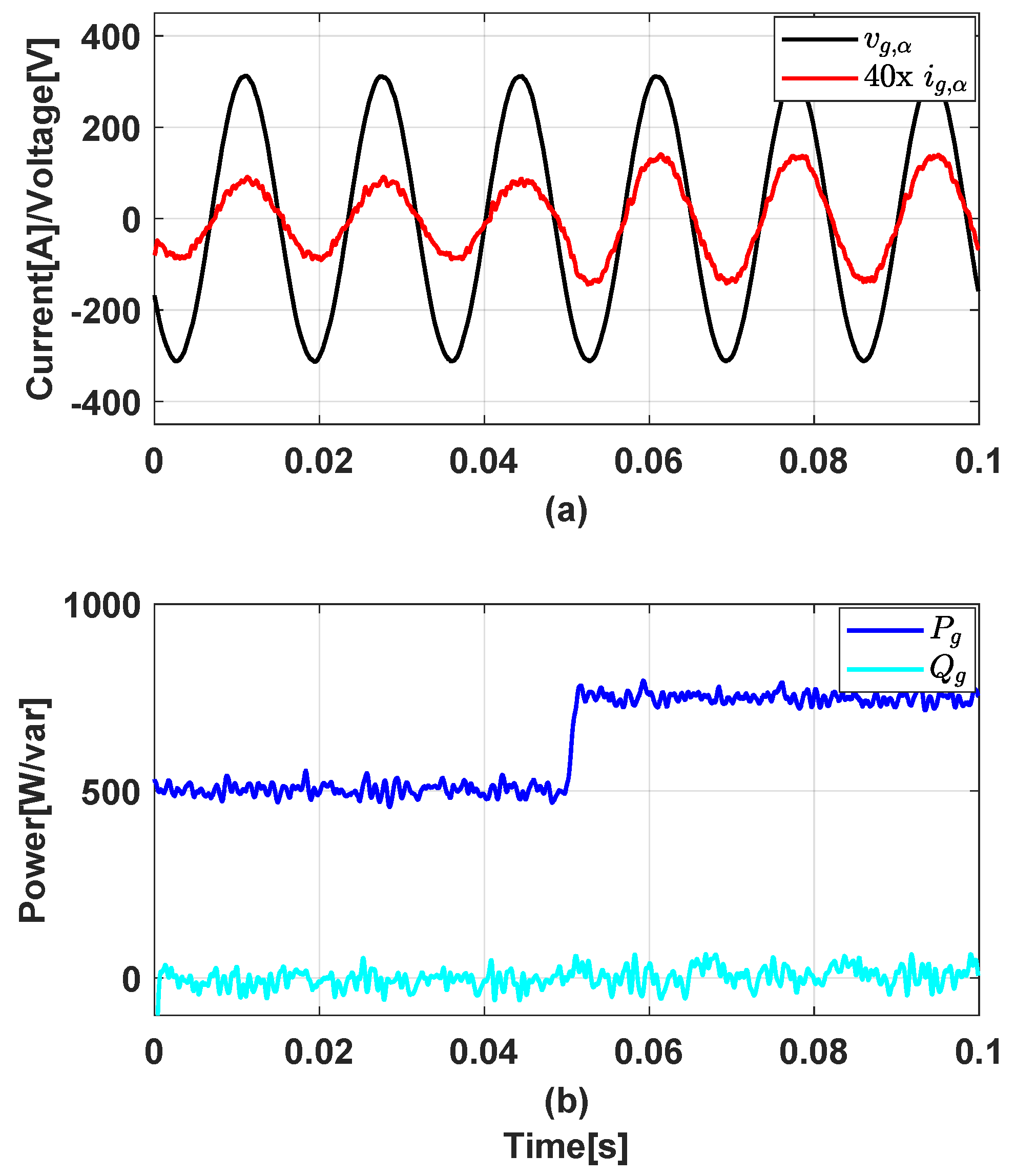
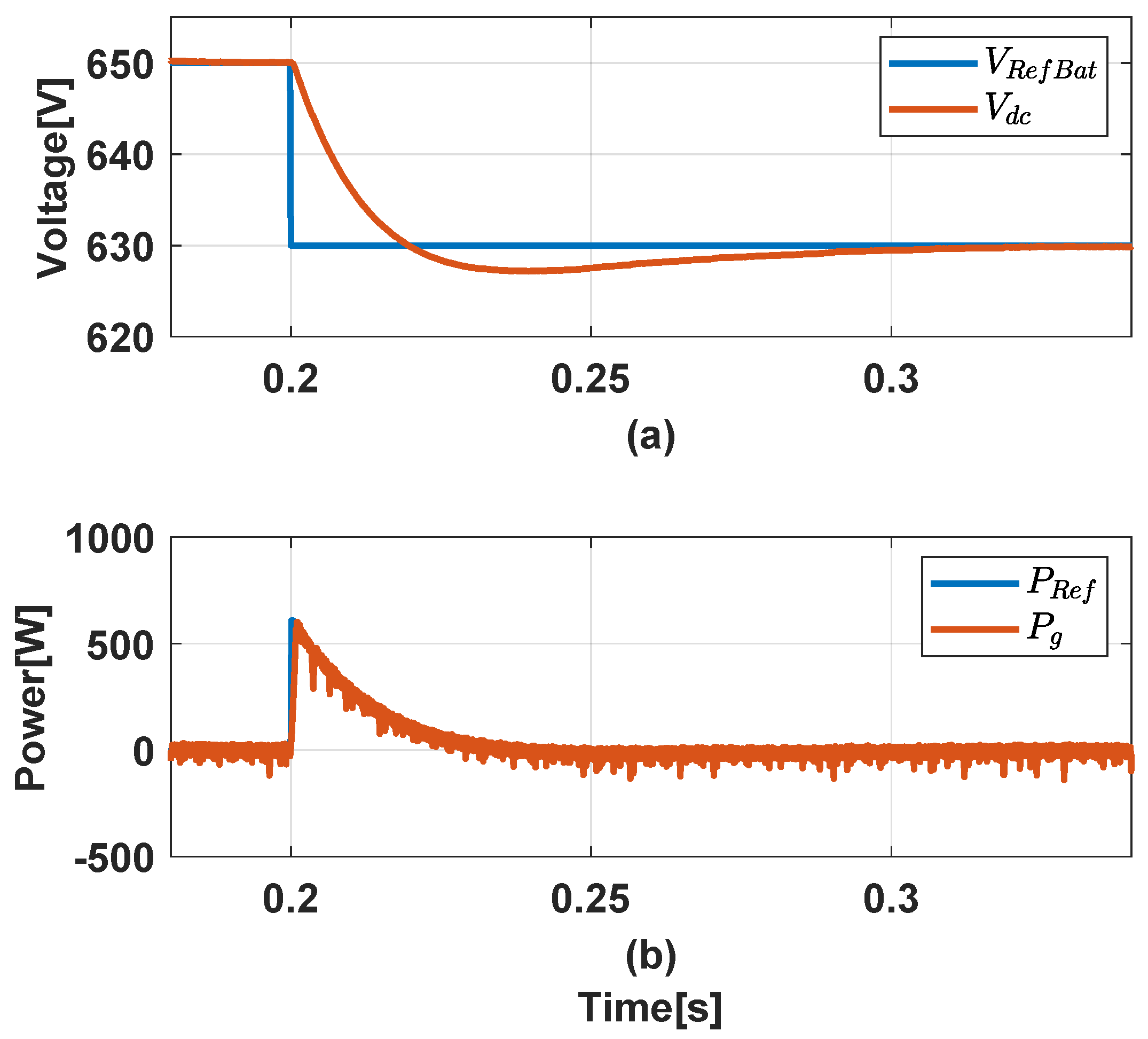
4.2. Finite Control Set Model Predictive Control (FCS-MPC) for Energy Storage Systems
5. Stability of Power Systems with High Penetration of Grid-Connected Converters
- Low short-circuit strength and weak grid issues;
- Inertia reduction and frequency stability;
- Converter-associated interactions and resonance.
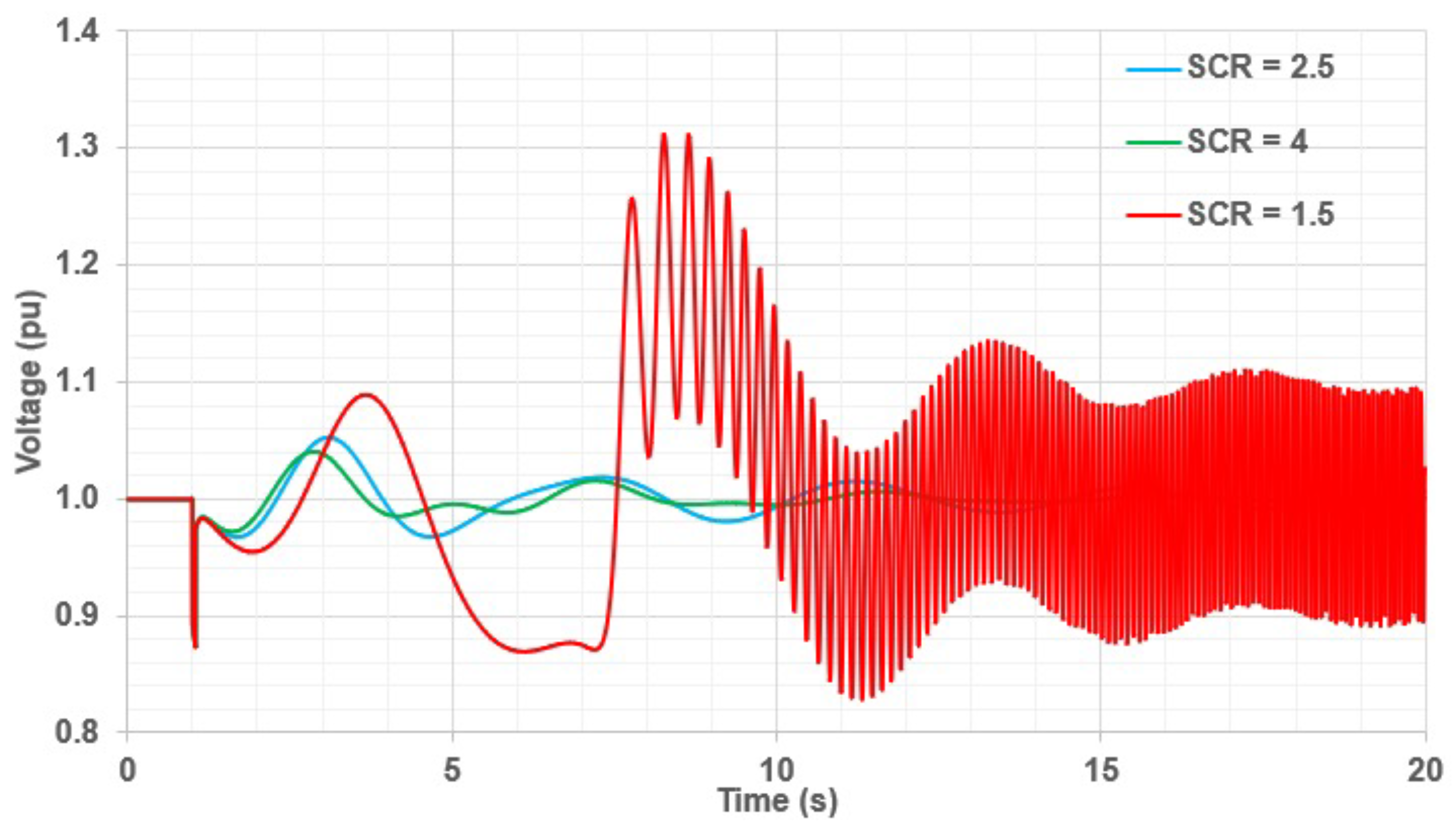
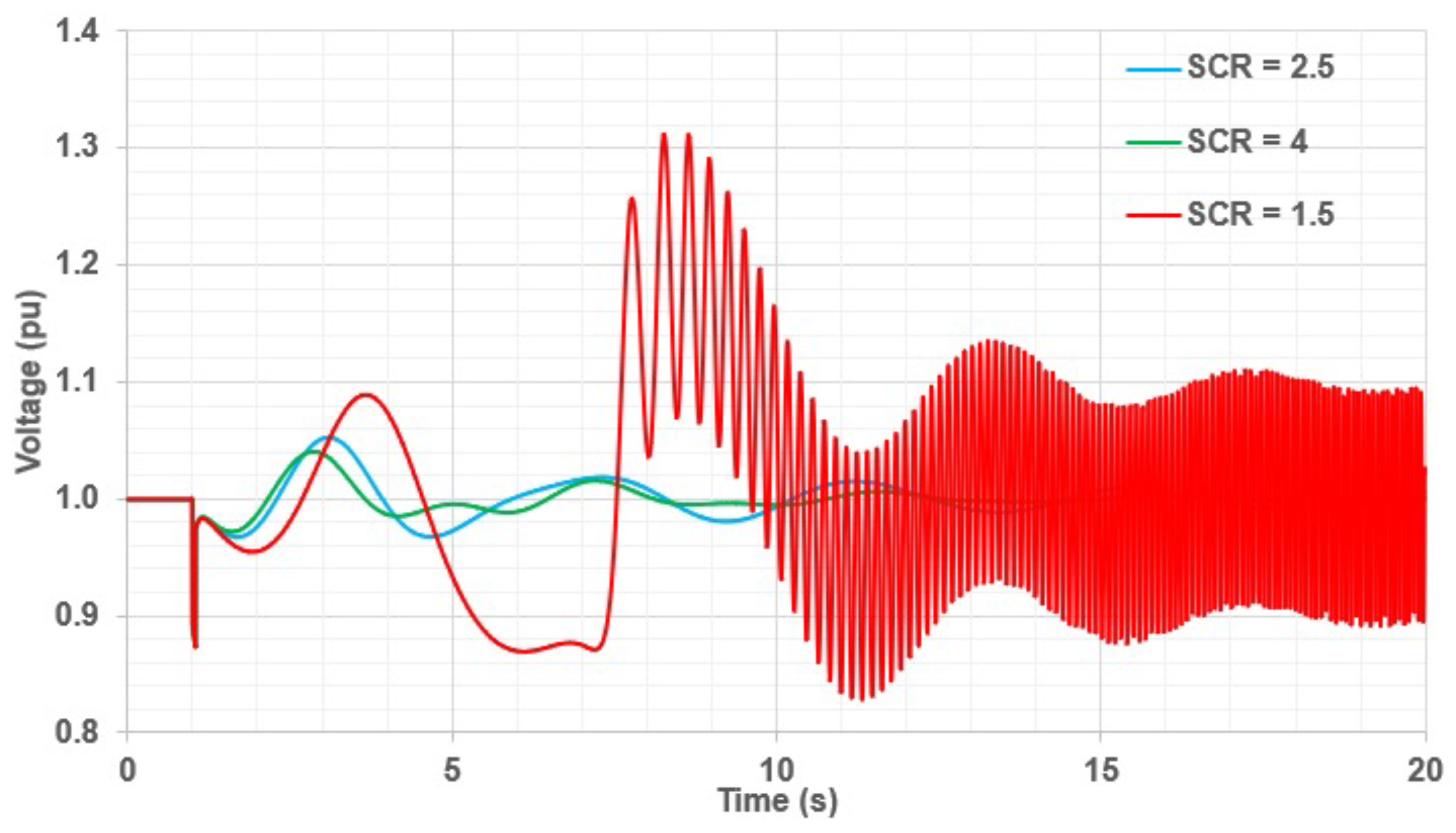
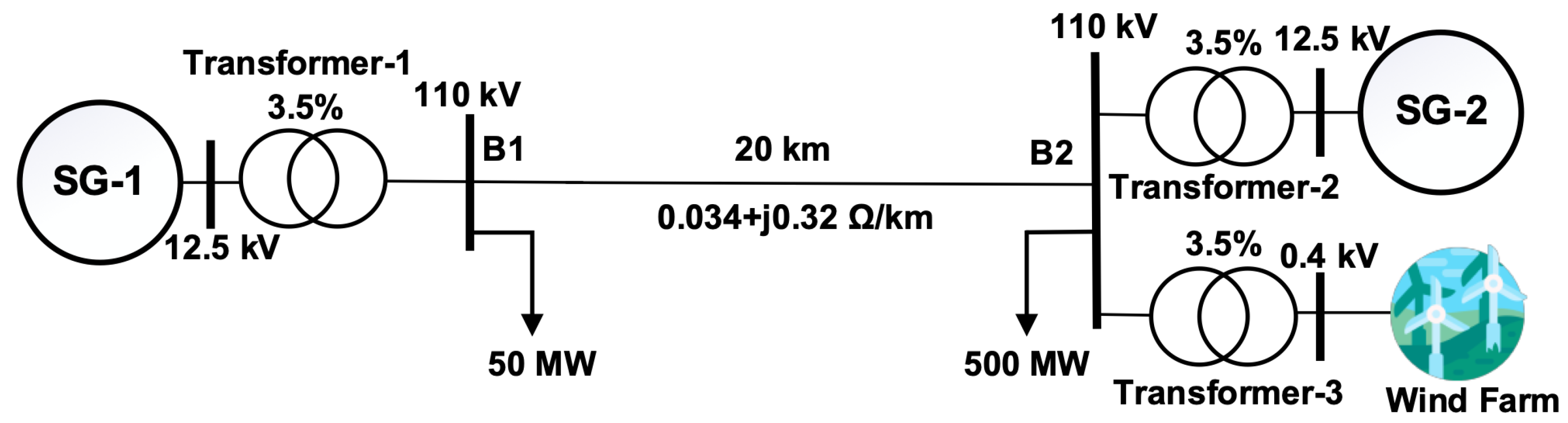
5.1. Low Short-Circuit Strength and Weak Grid Issues
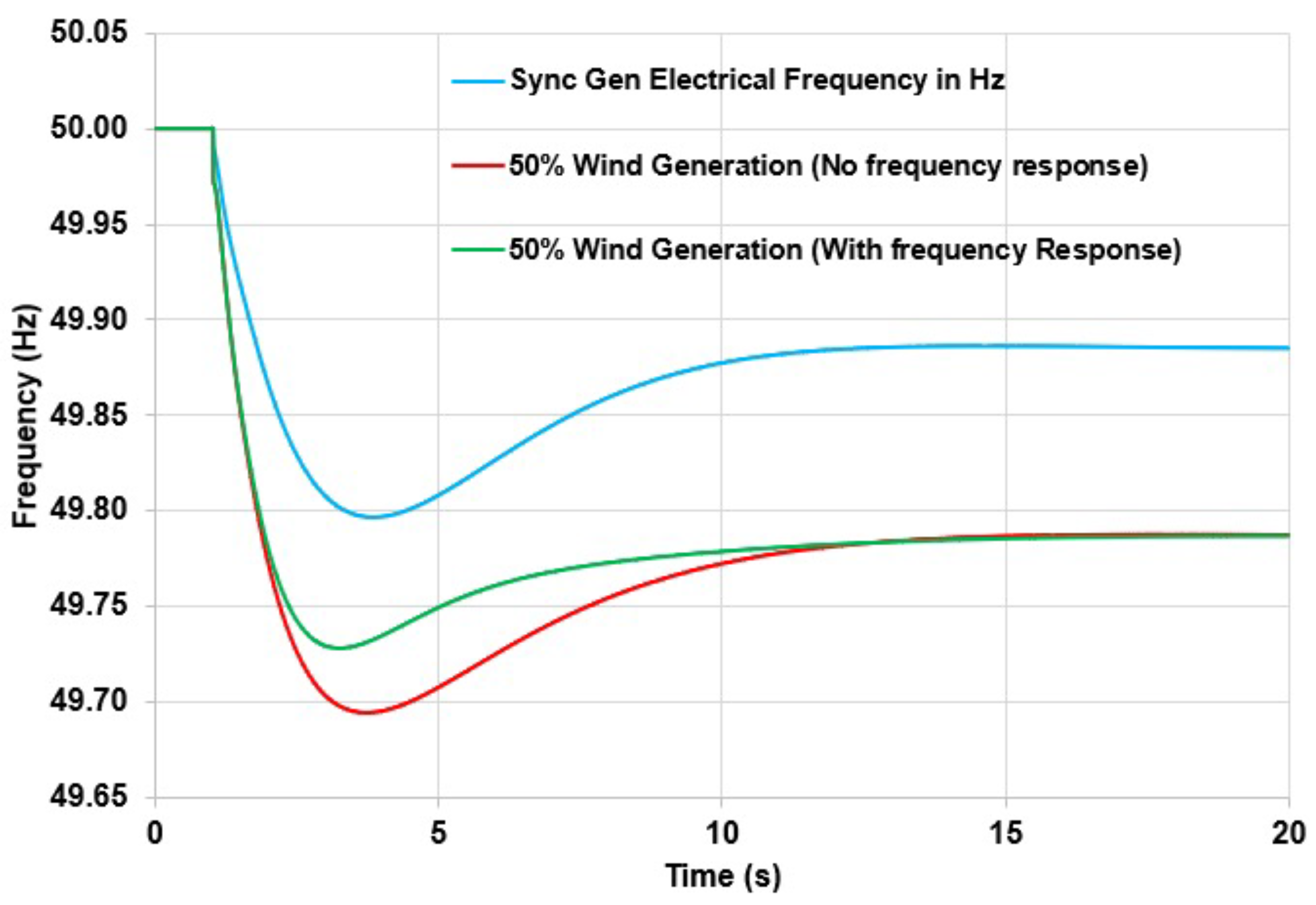
5.2. Inertia Reduction and Frequency Stability Issues
5.3. Other Converter-Associated Stability Issues
- Weak grid-driven converter-associated stability issues—The phase-locked loop and inner current control loop can destabilize the PEC under weak grid conditions, while leading to sustained oscillations in the power grid [114,115]. The PEC-interfaced generation sources and voltage source converter (VSC)-based HVDC converter systems have reported PLL-based stability issues under weak grid scenarios. High PLL gain is identified as the root cause of this instability issue [114]. Various alternative PLL schemes have been proposed to overcome these weak grid-related stability issues [116]. Moreover, inner current loop gains are also reported to be the cause of instability in PEC-interfaced sources under weak grid conditions [117].
- Fast interactions—When the PEC-interfaced sources are involved with oscillation frequencies higher than the nominal power frequency, these interactions are categorized as fast interactions. These oscillation frequencies could be high as the kHz range. There are several mechanisms by which these fast interactions could occur: (1) between PEC controllers and the passive power network elements, (2) between one PEC controller and another PEC controller or a PEC cluster, (3) between PEC controllers and other network devices, such as synchronous generators. These fast interactions are not limited to the PEC-interfaced generation sources, but also present in other PEC-interfaced devices, such as STATCOMs and HVDC systems [118,119].
- Slow interactions—The slow interactions can also originate from the same mechanisms outlined in the fast interactions category. However, the frequency range is less than the power frequency (typically less than 10 Hz); therefore, the frequency range of these interactions depends on the controller parameters and network elements. Other than these mechanisms, weak grid-related oscillations also occur at this low-frequency range, but should be analyzed under the weak grid category.
- Resonance issues—The resonance issues could arise when the network elements (series capacitors) together with the source-end impedances form a resonance circuit at sub-synchronous frequencies, leading to effective negative resistance [120]. Ultimately, this would lead to high current and voltage oscillations while damaging power grid equipment. This type of resonance condition has been reported in a number of power networks (e.g., China and ERCOT-Texas) [120], and researchers have mainly referred to these resonance issues as sub-synchronous control interactions (SSCI). Compared with the conventional resonance issues, in this particular resonance issue, PEC converters play a major role by affecting the negative resistance by PEC controllers. Therefore, the resonance condition is governed by the PEC controller.
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| AC | Alternating Current |
| BESS | Battery Energy Storage System |
| CIR | Converter Interfaced Resource |
| DC | Direct Current |
| DFIG | Doubly Fed Induction Generator |
| EMS | Energy Management System |
| EV | Electric Vehicle |
| FCS | Finite Control Set |
| GFL | Grid-Following |
| GFM | Grid-Forming |
| GPC | Generalized Predictive Control |
| GSC | Rotor Side Converter |
| PLL | Phase-Locked Loop |
| PV | Photovoltaic |
| MPC | Model Predictive Control |
| POC | Point of Connection |
| PWM | Pulse Width Modulation |
| SCR | Short-Circuit Ratio |
| SG | Synchronous Generator |
| VSC | Voltage Source Converter |
References
- Zhao, Z.Y.; Chen, Y.L. Critical factors affecting the development of renewable energy power generation: Evidence from China. J. Clean. Prod. 2018, 184, 466–480. [Google Scholar] [CrossRef]
- Fell, H.; Gilbert, A.; Jenkins, J.D.; Mildenberger, M. Nuclear power and renewable energy are both associated with national decarbonization. Nat. Energy 2022, 7, 25–29. [Google Scholar] [CrossRef]
- Murdock, H.E.; Gibb, D.; Andre, T.; Sawin, J.L.; Brown, A.; Ranalder, L.; Collier, U.; Dent, C.; Epp, B.; Hareesh Kumar, C.; et al. Renewables 2021-Global Status Report. 2021. Available online: https://www.unep.org/resources/report/renewables-2021-global-status-report (accessed on 1 May 2022).
- Upadhyay, S.; Sharma, M. A review on configurations, control and sizing methodologies of hybrid energy systems. Renew. Sustain. Energy Rev. 2014, 38, 47–63. [Google Scholar] [CrossRef]
- Manzano-Agugliaro, F.; Alcayde, A.; Montoya, F.G.; Zapata-Sierra, A.; Gil, C. Scientific production of renewable energies worldwide: An overview. Renew. Sustain. Energy Rev. 2013, 18, 134–143. [Google Scholar] [CrossRef]
- Collados-Rodriguez, C.; Cheah-Mane, M.; Prieto-Araujo, E.; Gomis-Bellmunt, O. Stability and operation limits of power systems with high penetration of power electronics. Int. J. Electr. Power Energy Syst. 2022, 138, 107728. [Google Scholar] [CrossRef]
- Gomis-Bellmunt, O.; Sánchez-Sánchez, E.; Arévalo-Soler, J.; Prieto-Araujo, E. Principles of operation of grids of DC and AC subgrids interconnected by power converters. IEEE Trans. Power Deliv. 2020, 36, 1107–1117. [Google Scholar] [CrossRef]
- Milano, F.; Dörfler, F.; Hug, G.; Hill, D.J.; Verbič, G. Foundations and challenges of low-inertia systems. In Proceedings of the 2018 Power Systems Computation Conference (PSCC), Dublin, Ireland, 11–15 June 2018; pp. 1–25. [Google Scholar]
- Camacho, E.F.; Bordons, C. Introduction to model predictive control. In Model Predictive Control; Springer: Berlin/Heidelberg, Germany, 2007; pp. 1–11. [Google Scholar]
- Rodriguez, J.; Kazmierkowski, M.P.; Espinoza, J.R.; Zanchetta, P.; Abu-Rub, H.; Young, H.A.; Rojas, C.A. State of the art of finite control set model predictive control in power electronics. IEEE Trans. Ind. Inform. 2012, 9, 1003–1016. [Google Scholar] [CrossRef]
- Gomez, L.A.; Lourenço, L.F.; Grilo, A.P.; Salles, M.B.; Meegahapola, L.; Sguarezi Filho, A.J. Primary frequency response of microgrid using doubly fed induction generator with finite control set model predictive control plus droop control and storage system. IEEE Access 2020, 8, 189298–189312. [Google Scholar] [CrossRef]
- Lunardi, A.; Sguarezi Filho, A.J. Current Control for DFIG Systems Under Distorted Voltage Using Predictive—Repetitive Control. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 9, 4354–4363. [Google Scholar]
- Conde D, E.R.; Lunardi, A.; Normandia Lourenço, L.F.; Sguarezi Filho, A.J. A Predictive Repetitive Current Control in Stationary Reference Frame for DFIG Systems under Distorted Voltage Operation. IEEE J. Emerg. Sel. Top. Power Electron. 2022. [Google Scholar] [CrossRef]
- Liu, Y.; Cheng, S.; Ning, B.; Li, Y. Robust model predictive control with simplified repetitive control for electrical machine drives. IEEE Trans. Power Electron. 2018, 34, 4524–4535. [Google Scholar] [CrossRef]
- Prieto Cerón, C.E.; Normandia Lourenço, L.F.; Solís-Chaves, J.S.; Sguarezi Filho, A.J. A Generalized Predictive Controller for a Wind Turbine Providing Frequency Support for a Microgrid. Energies 2022, 15, 2562. [Google Scholar] [CrossRef]
- Gomez, L.; Lourenço, L.; Salles, M.; Grilo, A. Frequency support by grid connected DFIG-based wind farms. In Design, Analysis, and Applications of Renewable Energy Systems; Elsevier: Amsterdam, The Netherlands, 2021; pp. 481–496. [Google Scholar]
- Lasseter, R.H.; Chen, Z.; Pattabiraman, D. Grid-forming inverters: A critical asset for the power grid. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 8, 925–935. [Google Scholar] [CrossRef]
- Meegahapola, L.; Mancarella, P.; Flynn, D.; Moreno, R. Power system stability in the transition to a low carbon grid: A techno-economic perspective on challenges and opportunities. Wiley Interdiscip. Rev. Energy Environ. 2021, 10, e399. [Google Scholar] [CrossRef]
- He, X.; Pan, S.; Geng, H. Transient Stability of Hybrid Power Systems Dominated by Different Types of Grid-Forming Devices. IEEE Trans. Energy Convers. 2021, 37, 868–879. [Google Scholar] [CrossRef]
- Lourenço, L.F.; Perez, F.; Iovine, A.; Damm, G.; Monaro, R.M.; Salles, M.B. Stability Analysis of Grid-Forming MMC-HVDC Transmission Connected to Legacy Power Systems. Energies 2021, 14, 8017. [Google Scholar] [CrossRef]
- Tayyebi, A.; Groß, D.; Anta, A.; Kupzog, F.; Dörfler, F. Frequency stability of synchronous machines and grid-forming power converters. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 8, 1004–1018. [Google Scholar] [CrossRef] [Green Version]
- Our World in Data. Installed Solar Energy Capacity. Available online: https://ourworldindata.org/grapher/installed-solar-pv-capacity (accessed on 21 February 2022).
- Park, J.; Liang, W.; Choi, J.; El-Keib, A.; Shahidehpour, M.; Billinton, R. A probabilistic reliability evaluation of a power system including solar/photovoltaic cell generator. In Proceedings of the Power & Energy Society General Meeting, Calgary, AB, Canada, 26–30 July 2009; pp. 1–6. [Google Scholar]
- Antonanzas, J.; Osorio, N.; Escobar, R.; Urraca, R.; Martinez-de Pison, F.; Antonanzas-Torres, F. Review of photovoltaic power forecasting. Sol. Energy 2016, 136, 78–111. [Google Scholar] [CrossRef]
- Von Appen, J.; Braun, M.; Stetz, T.; Diwold, K.; Geibel, D. Time in the sun: The challenge of high PV penetration in the German electric grid. IEEE Power Energy Mag. 2013, 11, 55–64. [Google Scholar] [CrossRef]
- Mountain, B.; Szuster, P. Solar, solar everywhere: Opportunities and challenges for Australia’s rooftop PV systems. IEEE Power Energy Mag. 2015, 13, 53–60. [Google Scholar] [CrossRef]
- Aneel, C.T. Micro e Minigeração Distribuída. In Sistema de Compensação de Energia Elétrica; Centro de Documentação–Cedoc: Brasília, Brasil, 2014. [Google Scholar]
- Ekström, J.; Koivisto, M.; Mellin, I.; Millar, R.J.; Lehtonen, M. A Statistical Model for Hourly Large-Scale Wind and Photovoltaic Generation in New Locations. IEEE Trans. Sustain. Energy 2017, 8, 1383–1393. [Google Scholar] [CrossRef] [Green Version]
- Fernandes, A.T.; Lourenço, L.F.; Monaro, R.M.; Cardoso, J.R. Statistical modeling of solar irradiance for Northeast Brazil. In Proceedings of the 2019 8th International Conference on Renewable Energy Research and Applications (ICRERA), Brasov, Romania, 3–6 November 2019; pp. 386–391. [Google Scholar]
- Salam, Z.; Ahmed, J.; Merugu, B.S. The application of soft computing methods for MPPT of PV system: A technological and status review. Appl. Energy 2013, 107, 135–148. [Google Scholar] [CrossRef]
- Podder, A.K.; Roy, N.K.; Pota, H.R. MPPT methods for solar PV systems: A critical review based on tracking nature. IET Renew. Power Gener. 2019, 13, 1615–1632. [Google Scholar] [CrossRef]
- De Brito, M.A.; Sampaio, L.P.; Luigi, G.; e Melo, G.A.; Canesin, C.A. Comparative analysis of MPPT techniques for PV applications. In Proceedings of the 2011 International Conference on Clean Electrical Power (ICCEP), Ischia, Italy, 14–16 June 2011; pp. 99–104. [Google Scholar]
- Ackermann, T.; Ellis, A.; Fortmann, J.; Matevosyan, J.; Muljadi, E.; Piwko, R.; Pourbeik, P.; Quitmann, E.; Sorensen, P.; Urdal, H.; et al. Code Shift: Grid Specifications and Dynamic Wind Turbine Models. IEEE Power Energy Mag. 2013, 11, 72–82. [Google Scholar] [CrossRef]
- Varma, R.K.; Rahman, S.A.; Mahendra, A.; Seethapathy, R.; Vanderheide, T. Novel nighttime application of PV solar farms as STATCOM (PV-STATCOM). In Proceedings of the IEEE Power and Energy Society General Meeting, San Diego, CA, USA, 22–26 July 2012; pp. 1–8. [Google Scholar]
- Varma, R.K.; Rahman, S.A.; Vanderheide, T. New control of PV solar farm as STATCOM (PV-STATCOM) for increasing grid power transmission limits during night and day. IEEE Trans. Power Deliv. 2015, 30, 755–763. [Google Scholar] [CrossRef]
- Lourenço, L.F.N.; Salles, M.B.C.; Monaro, R.M.; Quéval, L. Technical cost of PV-STATCOM applications. In Proceedings of the 2017 IEEE 6th International Conference on Renewable Energy Research and Applications (ICRERA), San Diego, CA, USA, 5–8 November 2017; pp. 534–538. [Google Scholar]
- Lourenço, L.F.; Monaro, R.M.; Salles, M.B.; Cardoso, J.R.; Quéval, L. Evaluation of the reactive power support capability and associated technical costs of photovoltaic farms’ operation. Energies 2018, 11, 1567. [Google Scholar] [CrossRef] [Green Version]
- Lourenco, L.F.N.; de Camargo Salles, M.B.; Monaro, R.M.; Queval, L. Technical cost of operating a photovoltaic installation as a STATCOM at nighttime. IEEE Trans. Sustain. Energy 2018, 10, 75–81. [Google Scholar] [CrossRef]
- Kumar, N.; Buwa, O.N.; Thakre, M.P. Virtual synchronous machine based PV-STATCOM controller. In Proceedings of the 2020 IEEE First International Conference on Smart Technologies for Power, Energy and Control (STPEC), Nagpur, India, 25–26 September 2020; pp. 1–6. [Google Scholar]
- Varma, R.K.; Maleki, H. PV solar system control as STATCOM (PV-STATCOM) for power oscillation damping. IEEE Trans. Sustain. Energy 2018, 10, 1793–1803. [Google Scholar]
- Varma, R.K.; Salehi, R. SSR mitigation with a new control of PV solar farm as STATCOM (PV-STATCOM). IEEE Trans. Sustain. Energy 2017, 8, 1473–1483. [Google Scholar] [CrossRef]
- Blaabjerg, F.; Chen, Z.; Kjaer, S.B. Power electronics as efficient interface in dispersed power generation systems. IEEE Trans. Power Electron. 2004, 19, 1184–1194. [Google Scholar]
- Kouro, S.; Leon, J.I.; Vinnikov, D.; Franquelo, L.G. Grid-connected photovoltaic systems: An overview of recent research and emerging PV converter technology. IEEE Ind. Electron. Mag. 2015, 9, 47–61. [Google Scholar] [CrossRef]
- Yazdani, A.; Di Fazio, A.R.; Ghoddami, H.; Russo, M.; Kazerani, M.; Jatskevich, J.; Strunz, K.; Leva, S.; Martinez, J.A. Modeling guidelines and a benchmark for power system simulation studies of three-phase single-stage photovoltaic systems. IEEE Trans. Power Deliv. 2011, 26, 1247–1264. [Google Scholar] [CrossRef]
- Huang, L.; Qiu, D.; Xie, F.; Chen, Y.; Zhang, B. Modeling and Stability Analysis of a Single-Phase Two-Stage Grid-Connected Photovoltaic System. Energies 2017, 10, 2176. [Google Scholar] [CrossRef] [Green Version]
- Cole, S. Steady-State and Dynamic Modelling of VSC HVDC Systems for Power System Simulation; Katholieke Universiteit Leuven: Leuven, Belgium, 2010. [Google Scholar]
- Hansen, A.D.; Michalke, G. Modelling and control of variable-speed multi-pole permanent magnet synchronous generator wind turbine. Wind. Energy 2008, 11, 537–554. [Google Scholar] [CrossRef]
- Quéval, L.; Ohsaki, H. Back-to-back converter design and control for synchronous generator-based wind turbines. In Proceedings of the 2012 International Conference on Renewable Energy Research and Applications (ICRERA), Nagasaki, Japan, 11–14 November 2012; pp. 1–6. [Google Scholar]
- Yazdani, A.; Iravani, R. Voltage-Sourced Converters in Power Systems: Modeling, Control, and Applications; John Wiley & Sons: Hoboken, NJ, USA, 2010. [Google Scholar]
- Lourenço, L.F.N. Technical Cost of Operating a PV Installation as a STATCOM during Nightime. Master’s Thesis, Universidade de São Paulo, São Paulo, Brazil, 2017. [Google Scholar]
- Mirhosseini, M.; Pou, J.; Agelidis, V.G. Single- and two-stage inverter-based grid-connected photovoltaic power plants with ride-through capability under grid faults. IEEE Trans. Sustain. Energy 2014, 6, 1150–1159. [Google Scholar] [CrossRef]
- Li, W.; He, X. Review of nonisolated high-step-up DC/DC converters in photovoltaic grid-connected applications. IEEE Trans. Ind. Electron. 2010, 58, 1239–1250. [Google Scholar] [CrossRef]
- Zapata, J.W.; Kouro, S.; Carrasco, G.; Renaudineau, H.; Meynard, T.A. Analysis of partial power DC–DC converters for two-stage photovoltaic systems. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 7, 591–603. [Google Scholar] [CrossRef]
- Iovine, A.; Siad, S.B.; Damm, G.; De Santis, E.; Di Benedetto, M.D. Nonlinear control of a DC microgrid for the integration of photovoltaic panels. IEEE Trans. Autom. Sci. Eng. 2017, 14, 524–535. [Google Scholar] [CrossRef] [Green Version]
- Iovine, A.; Carrizosa, M.J.; Damm, G.; Alou, P. Nonlinear control for DC microgrids enabling efficient renewable power integration and ancillary services for AC grids. IEEE Trans. Power Syst. 2018, 34, 5136–5146. [Google Scholar] [CrossRef]
- Faifer, M.; Piegari, L.; Rossi, M.; Toscani, S. An Average Model of DC–DC Step-Up Converter Considering Switching Losses and Parasitic Elements. Energies 2021, 14, 7780. [Google Scholar] [CrossRef]
- Haripriya, T.; Parimi, A.M.; Rao, U. Modeling of DC-DC boost converter using fuzzy logic controller for solar energy system applications. In Proceedings of the 2013 IEEE Asia Pacific Conference on Postgraduate Research in Microelectronics and Electronics (PrimeAsia), Visakhapatnam, India, 19–21 December 2013; pp. 147–152. [Google Scholar]
- Vargas-Gil, G.M.; Colque, C.J.C.; Sguarezi, A.J.; Monaro, R.M. Sliding mode plus PI control applied in PV systems control. In Proceedings of the 2017 IEEE 6th International Conference on Renewable Energy Research and Applications (ICRERA), San Diego, CA, USA, 5–8 November 2017; pp. 562–567. [Google Scholar]
- Vargas Gil, G.M.; Lima Rodrigues, L.; Inomoto, R.S.; Sguarezi, A.J.; Machado Monaro, R. Weighted-PSO applied to tune sliding mode plus PI controller applied to a boost converter in a PV system. Energies 2019, 12, 864. [Google Scholar] [CrossRef] [Green Version]
- Mohan, N.; Undeland, T.M.; Robbins, W.P. Power Electronics: Converters, Applications, and Design; John Wiley & Sons: Hoboken, NJ, USA, 2003. [Google Scholar]
- Ibrahim, O.; Yahaya, N.Z.; Saad, N. Comparative studies of PID controller tuning methods on a DC-DC boost converter. In Proceedings of the 2016 6th International Conference on Intelligent and Advanced Systems (ICIAS), Kuala Lumpur, Malaysia, 15–17 August 2016; pp. 1–5. [Google Scholar]
- Mamizadeh, A.; Genc, N.; Rajabioun, R. Optimal tuning of pi controller for boost dc-dc converters based on cuckoo optimization algorithm. In Proceedings of the 2018 7th International Conference on Renewable Energy Research and Applications (ICRERA), Paris, France, 14–17 October 2018; pp. 677–680. [Google Scholar]
- Elshaer, M.; Mohamed, A.; Mohammed, O. Smart optimal control of DC-DC boost converter for intelligent PV systems. In Proceedings of the 2011 16th International Conference on Intelligent System Applications to Power Systems, Hersonissos, Greece, 25–28 September 2011; pp. 1–6. [Google Scholar]
- Sabarish, P.; Sneha, R.; Vijayalakshmi, G.; Nikethan, D. Performance Analysis of PV-Based Boost Converter using PI Controller with PSO Algorithm. J. Sci. Technol. (JST) 2017, 2, 17–24. [Google Scholar]
- Talbi, B.; Krim, F.; Laib, A.; Sahli, A.; Krama, A. PI-MPC Switching Control for DC-DC Boost Converter using an Adaptive Sliding Mode Observer. In Proceedings of the 2020 International Conference on Electrical Engineering (ICEE), Istanbul, Turkey, 25–27 September 2020; pp. 1–5. [Google Scholar]
- Oettmeier, F.M.; Neely, J.; Pekarek, S.; DeCarlo, R.; Uthaichana, K. MPC of switching in a boost converter using a hybrid state model with a sliding mode observer. IEEE Trans. Ind. Electron. 2008, 56, 3453–3466. [Google Scholar] [CrossRef]
- Inomoto, R.; Monteiro, J.; Sguarezi Filho, A. Boost Converter Control of PV System Using Sliding Mode Control with Integrative Sliding Surface. IEEE J. Emerg. Sel. Top. Power Electron. 2022. [Google Scholar] [CrossRef]
- Liu, J.; Cheng, S.; Liu, Y.; Shen, A. FCS-MPC for a single-phase two-stage grid-connected PV inverter. IET Power Electron. 2019, 12, 915–922. [Google Scholar] [CrossRef]
- Hussain, A.; Sher, H.A.; Murtaza, A.F.; Al-Haddad, K. Improved restricted control set model predictive control (iRCS-MPC) based maximum power point tracking of photovoltaic module. IEEE Access 2019, 7, 149422–149432. [Google Scholar] [CrossRef]
- Cunha, R.; Inomoto, R.; Altuna, J.; Costa, F.; Di Santo, S.; Sguarezi Filho, A. Constant switching frequency finite control set model predictive control applied to the boost converter of a photovoltaic system. Sol. Energy 2019, 189, 57–66. [Google Scholar] [CrossRef]
- Abad, G.; Lopez, J.; Rodriguez, M.; Marroyo, L.; Iwanski, G. Doubly Fed Induction Machine: Modeling and Control for Wind Energy Generation; John Wiley & Sons: Hoboken, NJ, USA, 2011; Volume 85. [Google Scholar]
- Rodriguez, P.; Pou, J.; Bergas, J.; Candela, J.I.; Burgos, R.P.; Boroyevich, D. Decoupled Double Synchronous Reference Frame PLL for Power Converters Control. IEEE Trans. Power Electron. 2007, 22, 584–592. [Google Scholar] [CrossRef]
- Filho, A.J.S. Model Predictive Control for Doubly-Fed Induction Generators and Three-Phase Power Converters; Elsevier: Amsterdam, The Netherlands, 2022; Volume 1. [Google Scholar]
- Sguarezi Filho, A.J.; Ruppert, E. A deadbeat active and reactive power control for doubly fed induction generator. Electr. Power Components Syst. 2010, 38, 592–602. [Google Scholar] [CrossRef]
- Franklin, G.F.; Powell, J.D.; Workman, M.L. Digital Control of Dynamic Systems; Addison-Wesley: Menlo Park, CA, USA, 1998; Volume 3. [Google Scholar]
- Rodrigues, L.L.; Vilcanqui, O.A.C.; Murari, A.L.L.F.; Filho, A.J.S. Predictive Power Control for DFIG: A FARE-Based Weighting Matrices Approach. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 7, 967–975. [Google Scholar] [CrossRef]
- Zarei, M.E.; Asaei, B. Predictive direct torque control of DFIG under unbalanced and distorted stator voltage conditions. In Proceedings of the 2013 12th International Conference on Environment and Electrical Engineering, Wroclaw, Poland, 5–8 May 2013; pp. 507–512. [Google Scholar] [CrossRef]
- Zhang, Y.; Jiang, T.; Jiao, J. Model-free predictive current control of DFIG based on an extended state observer under unbalanced and distorted grid. IEEE Trans. Power Electron. 2020, 35, 8130–8139. [Google Scholar] [CrossRef]
- Zhang, Y.; Jiang, T. Robust Predictive Rotor Current Control of a Doubly Fed Induction Generator Under an Unbalanced and Distorted Grid. IEEE Trans. Energy Convers. 2021, 37, 433–442. [Google Scholar] [CrossRef]
- Ghodbane-Cherif, M.; Skander-Mustapha, S.; Slama-Belkhodja, I. An improved predictive control for parallel grid-connected doubly fed induction generator-based wind systems under unbalanced grid conditions. Wind Eng. 2019, 43, 377–391. [Google Scholar] [CrossRef]
- Gontijo, G.F.; Tricarico, T.C.; França, B.W.; Da Silva, L.F.; Van Emmerik, E.L.; Aredes, M. Robust model predictive rotor current control of a DFIG connected to a distorted and unbalanced grid driven by a direct matrix converter. IEEE Trans. Sustain. Energy 2018, 10, 1380–1392. [Google Scholar] [CrossRef]
- Lin, C.H.; Hsieh, C.Y.; Chen, K.H. A Li-ion battery charger with smooth control circuit and built-in resistance compensator for achieving stable and fast charging. IEEE Trans. Circuits Syst. Regul. Pap. 2009, 57, 506–517. [Google Scholar]
- Affanni, A.; Bellini, A.; Franceschini, G.; Guglielmi, P.; Tassoni, C. Battery choice and management for new-generation electric vehicles. IEEE Trans. Ind. Electron. 2005, 52, 1343–1349. [Google Scholar] [CrossRef] [Green Version]
- Liu, C.; Chau, K.; Wu, D.; Gao, S. Opportunities and challenges of vehicle-to-home, vehicle-to-vehicle, and vehicle-to-grid technologies. Proc. IEEE 2013, 101, 2409–2427. [Google Scholar] [CrossRef] [Green Version]
- Bonab, S.A.; Emadi, A. MPC-based energy management strategy for an autonomous hybrid electric vehicle. IEEE Open J. Ind. Appl. 2020, 1, 171–180. [Google Scholar] [CrossRef]
- Iovine, A.; Rigaut, T.; Damm, G.; De Santis, E.; Di Benedetto, M.D. Power management for a DC MicroGrid integrating renewables and storages. Control. Eng. Pract. 2019, 85, 59–79. [Google Scholar] [CrossRef]
- Gupta, S.C. Phase-locked loops. Proc. IEEE 1975, 63, 291–306. [Google Scholar] [CrossRef]
- Wu, B.; Lang, Y.; Zargari, N.; Kouro, S. Power Conversion and Control of Wind Energy Systems; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Dannehl, J.; Wessels, C.; Fuchs, F.W. Limitations of voltage-oriented PI current control of grid-connected PWM rectifiers with LCL filters. IEEE Trans. Ind. Electron. 2009, 56, 380–388. [Google Scholar] [CrossRef]
- Ciobotaru, M.; Teodorescu, R.; Blaabjerg, F. A new single-phase PLL structure based on second order generalized integrator. In Proceedings of the 2006 37th IEEE Power Electronics Specialists Conference, Jeju, Korea, 18–22 June 2006; pp. 1–6. [Google Scholar]
- Sevilmiş, F.; Karaca, H. Performance enhancement of DSOGI-PLL with a simple approach in grid-connected applications. Energy Rep. 2022, 8, 9–18. [Google Scholar] [CrossRef]
- Yu, J.; Yang, B.; Zhu, P.; Zhang, L.; Peng, Y.; Zhou, X. An improved digital phase locked loop against adverse grid conditions. Energy Rep. 2022, 8, 714–723. [Google Scholar] [CrossRef]
- Rodriguez, J.; Pontt, J.; Silva, C.A.; Correa, P.; Lezana, P.; Cortés, P.; Ammann, U. Predictive current control of a voltage source inverter. IEEE Trans. Ind. Electron. 2007, 54, 495–503. [Google Scholar] [CrossRef]
- Hatziargyriou, N.; Milanovic, J.; Rahmann, C.; Ajjarapu, V.; Canizares, C.; Erlich, I.; Hill, D.; Hiskens, I.; Kamwa, I.; Pal, B.; et al. Definition and classification of power system stability–revisited & extended. IEEE Trans. Power Syst. 2020, 36, 3271–3281. [Google Scholar]
- Dey, K.; Kulkarni, A. Analysis of the Passivity Characteristics of Synchronous Generators and Converter-Interfaced Systems for Grid Interaction Studies. Int. J. Electr. Power Energy Syst. 2021, 129, 106818. [Google Scholar] [CrossRef]
- Meegahapola, L.; Sguarezi, A.; Bryant, J.S.; Gu, M.; Conde D, E.R.; Cunha, R. Power system stability with power-electronic converter interfaced renewable power generation: Present issues and future trends. Energies 2020, 13, 3441. [Google Scholar] [CrossRef]
- Rocabert, J.; Luna, A.; Blaabjerg, F.; Rodriguez, P. Control of power converters in AC microgrids. IEEE Trans. Power Electron. 2012, 27, 4734–4749. [Google Scholar] [CrossRef]
- Rosso, R.; Wang, X.; Liserre, M.; Lu, X.; Engelken, S. Grid-forming converters: Control approaches, grid-synchronization, and future trends-A review. IEEE Open J. Ind. Appl. 2021, 2, 93–109. [Google Scholar] [CrossRef]
- Wang, X.; Taul, M.G.; Wu, H.; Liao, Y.; Blaabjerg, F.; Harnefors, L. Grid-synchronization stability of converter-based resources—An overview. IEEE Open J. Ind. Appl. 2020, 1, 115–134. [Google Scholar] [CrossRef]
- Hu, Q.; Han, R.; Quan, X.; Wu, Z.; Tang, C.; Li, W.; Wang, W. Grid-Forming Inverter Enabled Virtual Power Plants with Inertia Support Capability. IEEE Trans. Smart Grid 2022. [Google Scholar] [CrossRef]
- Hinchliffe, S.; Eggleston, J. System Strength, Inertia and Network Loss Factors—Implications for Power Networks and Renewable Generation. 2021. Available online: https://cse.cigre.org/cse-n023/system-strength-inertia-and-network-loss-factors-implications-for-power-networks-and-renewable-generation (accessed on 1 June 2022).
- Meegahapola, L.; Flynn, D.; Littler, T. Transient stability analysis of a power system with high wind penetration. In Proceedings of the 2008 43rd International Universities Power Engineering Conference, Padua, Italy, 1–4 September 2008; pp. 1–5. [Google Scholar]
- Du, W.; Wang, H.; Bu, S. Small-Signal Stability Analysis of Power Systems Integrated with Variable Speed Wind Generators; Springer: Berlin/Heidelberg, Germany, 2018. [Google Scholar]
- Amarasekara, K.; Meegahapola, L.G.; Agalgaonkar, A.P.; Perera, S. Characterisation of long-term voltage stability with variable-speed wind power generation. IET Gener. Transm. Distrib. 2017, 11, 1848–1855. [Google Scholar] [CrossRef]
- Munkhchuluun, E.; Meegahapola, L.; Vahidnia, A. Long-term voltage stability with large-scale solar-photovoltaic (PV) generation. Int. J. Electr. Power Energy Syst. 2020, 117, 105663. [Google Scholar] [CrossRef]
- Meegahapola, L.; Flynn, D. Impact on transient and frequency stability for a power system at very high wind penetration. In Proceedings of the IEEE PES General Meeting, Minneapolis, MN, USA, 25–29 July 2010; pp. 1–8. [Google Scholar]
- Yusuff, A.; Mosetlhe, T.; Ayodele, T. Statistical method for identification of weak nodes in power system based on voltage magnitude deviation. Electr. Power Syst. Res. 2021, 200, 107464. [Google Scholar] [CrossRef]
- Yu, L.; Meng, K.; Zhang, W.; Dong, J.; Nadarajah, M. System Strength Challenges: An Overview of Energy Transition in Australia’s National Electricity Market. In Proceedings of the 2021 IEEE 4th International Electrical and Energy Conference (CIEEC), Wuhan, China, 28–30 May 2021; pp. 1–6. [Google Scholar]
- Australian Energy Market Operator (AEMO). System Strength Impact Assessment Guidelines. 2018. Available online: https://aemo.com.au/-/media/Files/Electricity/NEM/Security_and_Reliability/System-Security-Market-Frameworks-Review/2018/System_Strength_Impact_Assessment_Guidelines_PUBLISHED.pdf (accessed on 14 March 2022).
- Ratnam, K.S.; Palanisamy, K.; Yang, G. Future low-inertia power systems: Requirements, issues, and solutions—A review. Renew. Sustain. Energy Rev. 2020, 124, 109773. [Google Scholar] [CrossRef]
- Stroe, D.I.; Knap, V.; Swierczynski, M.; Stroe, A.I.; Teodorescu, R. Operation of a grid-connected lithium-ion battery energy storage system for primary frequency regulation: A battery lifetime perspective. IEEE Trans. Ind. Appl. 2016, 53, 430–438. [Google Scholar] [CrossRef]
- Tan, Y.; Meegahapola, L.; Muttaqi, K.M. A suboptimal power-point-tracking-based primary frequency response strategy for DFIGs in hybrid remote area power supply systems. IEEE Trans. Energy Convers. 2015, 31, 93–105. [Google Scholar] [CrossRef]
- Tan, Y.; Muttaqi, K.M.; Ciufo, P.; Meegahapola, L. Enhanced frequency response strategy for a PMSG-based wind energy conversion system using ultracapacitor in remote area power supply systems. IEEE Trans. Ind. Appl. 2016, 53, 549–558. [Google Scholar] [CrossRef] [Green Version]
- Zhou, J.Z.; Ding, H.; Fan, S.; Zhang, Y.; Gole, A.M. Impact of Short-Circuit Ratio and Phase-Locked-Loop Parameters on the Small-Signal Behavior<? Pub _bookmark=”” Command=”[Quick Mark]”?> of a VSC-HVDC Converter. IEEE Trans. Power Deliv. 2014, 29, 2287–2296. [Google Scholar]
- Wang, X.; Blaabjerg, F. Harmonic stability in power electronic-based power systems: Concept, modeling, and analysis. IEEE Trans. Smart Grid 2018, 10, 2858–2870. [Google Scholar] [CrossRef] [Green Version]
- Huang, L.; Xin, H.; Wang, Z.; Huang, W.; Wang, K. An adaptive phase-locked loop to improve stability of voltage source converters in weak grids. In Proceedings of the 2018 IEEE Power & Energy Society General Meeting (PESGM), Portland, OR, USA, 5–10 August 2018; pp. 1–5. [Google Scholar]
- Midtsund, T.; Suul, J.; Undeland, T. Evaluation of current controller performance and stability for voltage source converters connected to a weak grid. In Proceedings of the 2nd International Symposium on Power Electronics for Distributed Generation Systems, Hefei, China, 16–18 June 2010; pp. 382–388. [Google Scholar]
- Kunjumuhammed, L.P.; Pal, B.C.; Oates, C.; Dyke, K.J. Electrical oscillations in wind farm systems: Analysis and insight based on detailed modeling. IEEE Trans. Sustain. Energy 2015, 7, 51–62. [Google Scholar] [CrossRef] [Green Version]
- Shu, D.; Xie, X.; Rao, H.; Gao, X.; Jiang, Q.; Huang, Y. Sub- and super-synchronous interactions between STATCOMs and weak AC/DC transmissions with series compensations. IEEE Trans. Power Electron. 2017, 33, 7424–7437. [Google Scholar] [CrossRef]
- Meegahapola, L.G.; Bu, S.; Wadduwage, D.P.; Chung, C.Y.; Yu, X. Review on oscillatory stability in power grids with renewable energy sources: Monitoring, analysis, and control using synchrophasor technology. IEEE Trans. Ind. Electron. 2020, 68, 519–531. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit | Parameter | Value | Unit |
|---|---|---|---|---|---|
| Peak Power | 250 | kW | 20 | H | |
| (1000 W/m, 25 C) | 510 | V | 0.37 | m | |
| 250 | V | C | 108 | mF | |
| f | 60 | Hz |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Stator Current | 12 A | Stator Voltage | 220/380 –Y |
| Stator Resistance | 1 | Rotor Resistance | 3.1322 |
| Rated Power | 3 kW | Mutual Inductance | 0.1917 H |
| Rated Speed | 1800 rpm | Stator Inductance | 0.2010 H |
| Frequency | 60 Hz | Rotor Inductance | 0.2010 H |
| Number of Poles | 4 | Inertia Constant | 0.05 kg m |
| DC Voltage | 130 V | Switching Frequency | 10 kHz |
| Vector Voltage | |||
|---|---|---|---|
| 0 | 0 | 0 | |
| 1 | 0 | 0 | |
| 1 | 1 | 0 | |
| 0 | 1 | 0 | |
| 0 | 1 | 1 | |
| 0 | 0 | 1 | |
| 1 | 0 | 1 | |
| 1 | 1 | 1 |
| Parameter | Value |
|---|---|
| Inductor Internal Resistance per Phase () | |
| Inductance per Phase () | 22 mH |
| Nominal Grid Frequency | 60 Hz |
| Nominal Grid Voltage () | V |
| Sampling Frequency | 20 kHz |
| Switching Frequency () | 20 kHz |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lunardi, A.; Normandia Lourenço, L.F.; Munkhchuluun, E.; Meegahapola, L.; Sguarezi Filho, A.J. Grid-Connected Power Converters: An Overview of Control Strategies for Renewable Energy. Energies 2022, 15, 4151. https://doi.org/10.3390/en15114151
Lunardi A, Normandia Lourenço LF, Munkhchuluun E, Meegahapola L, Sguarezi Filho AJ. Grid-Connected Power Converters: An Overview of Control Strategies for Renewable Energy. Energies. 2022; 15(11):4151. https://doi.org/10.3390/en15114151
Chicago/Turabian StyleLunardi, Angelo, Luís F. Normandia Lourenço, Enkhtsetseg Munkhchuluun, Lasantha Meegahapola, and Alfeu J. Sguarezi Filho. 2022. "Grid-Connected Power Converters: An Overview of Control Strategies for Renewable Energy" Energies 15, no. 11: 4151. https://doi.org/10.3390/en15114151
APA StyleLunardi, A., Normandia Lourenço, L. F., Munkhchuluun, E., Meegahapola, L., & Sguarezi Filho, A. J. (2022). Grid-Connected Power Converters: An Overview of Control Strategies for Renewable Energy. Energies, 15(11), 4151. https://doi.org/10.3390/en15114151