
New Hybrid Machine Learning Method for Detecting Faults in Three-Phase Power Transformers


Abstract
:1. Introduction
2. Materials and Methods
2.1. Description of the Model System
- Three phase transformer
- Power supply
- Three-phase load
- Six-current transformer with turn ratio of 40/5, rated burden is 1VA and Class 3 FS5
- Switch relay, OMRON G8P series SPST-NO, 5VDC, 30A
- Data acquisition (6211) card
- Power analyser LEM NORMA D 6000
- LabVIEW software
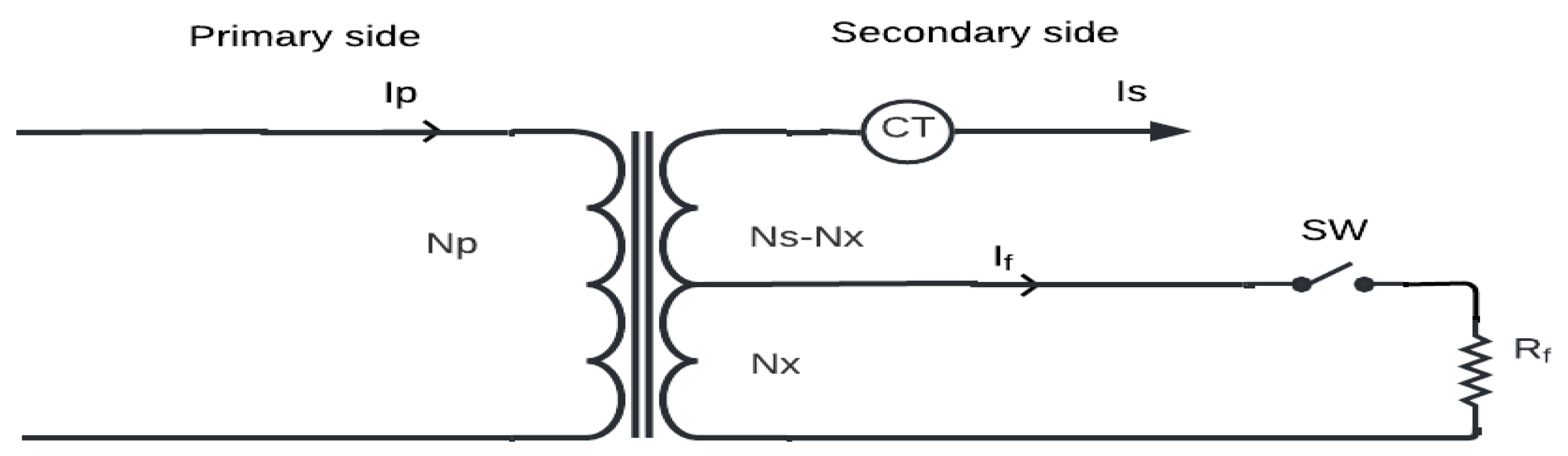
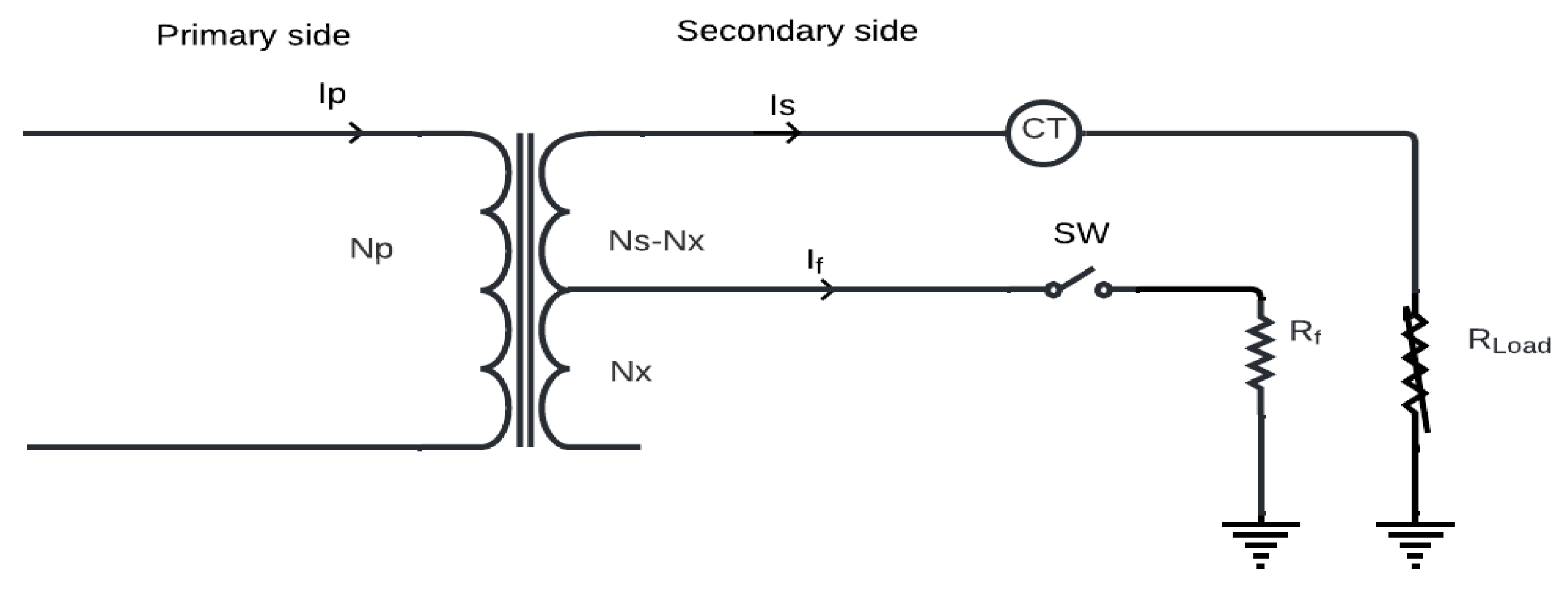
2.2. Turn-to-Turn Fault
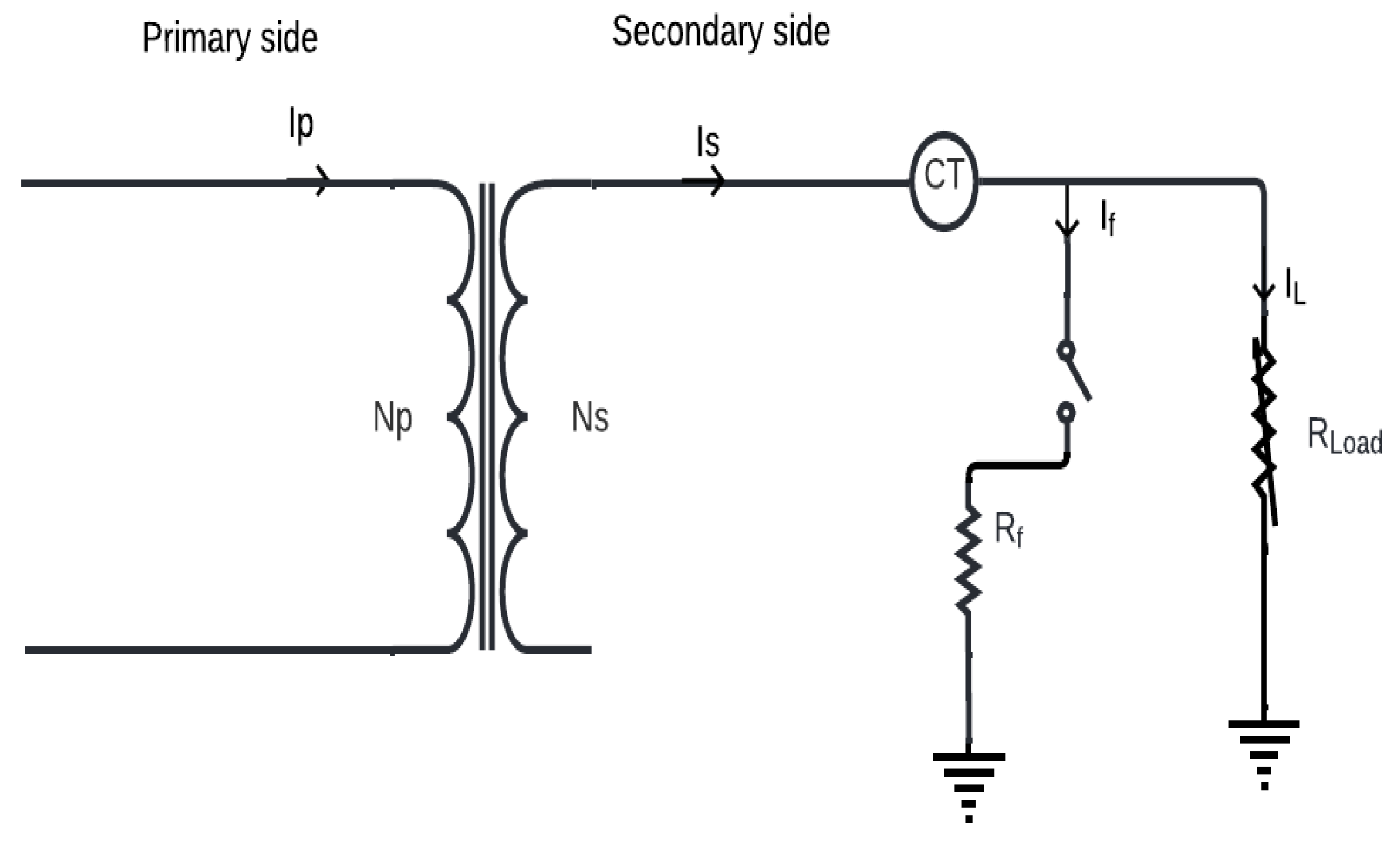
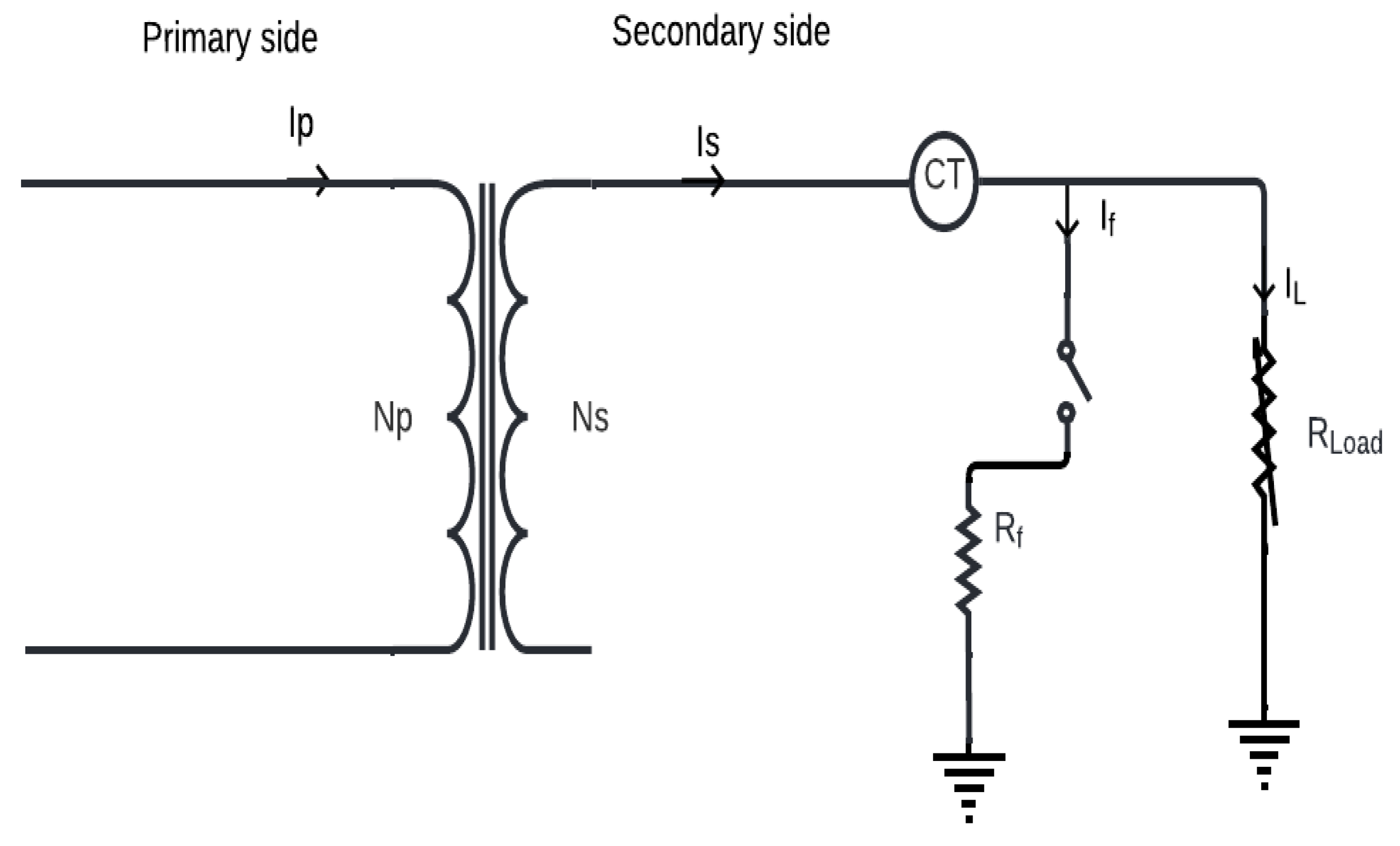
2.3. Turn-to-Ground Fault
2.4. Phase-to-Ground Fault
2.5. Phase–Phase Fault
2.6. External Fault
3. Research Methodology
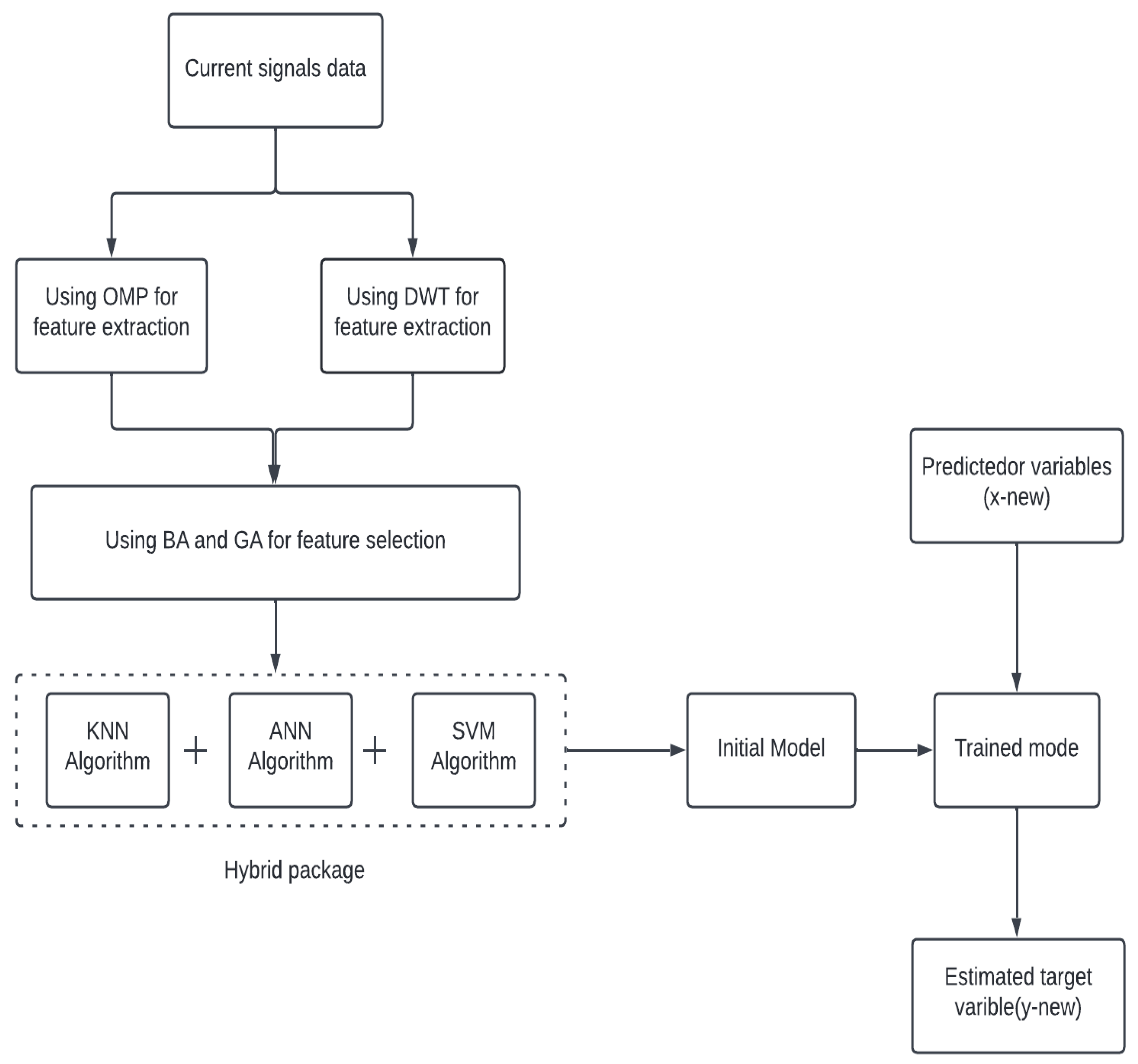
3.1. Feature Extraction
3.1.1. Discrete Wavelet Transform
3.1.2. Orthogonal Matching Pursuit
3.2. Feature Selection Algorithms
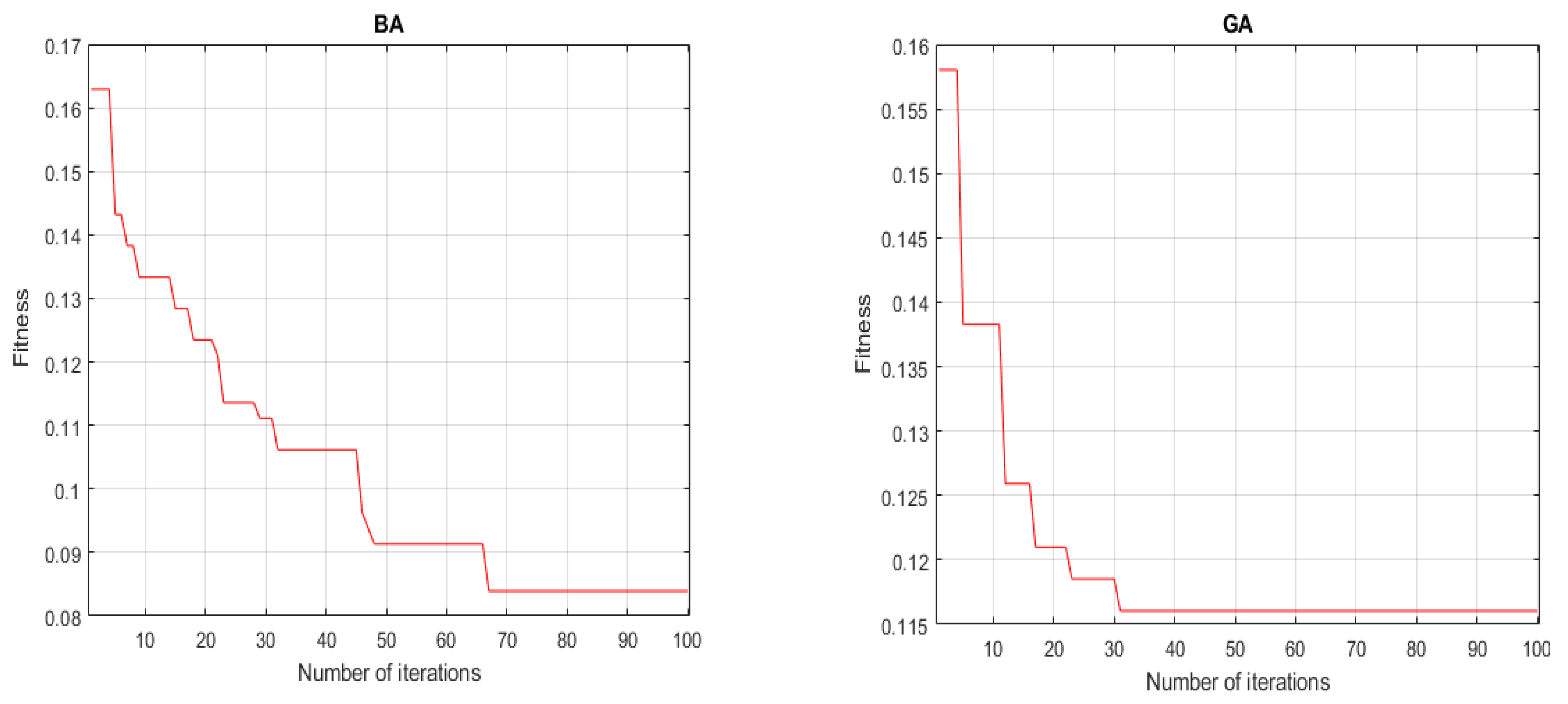
3.2.1. Bees Algorithm
3.2.2. Genetic Algorithm
3.3. Classification Techniques
3.3.1. K-Nearest Neighbour
3.3.2. Support Vector Machine
3.3.3. Artificial Neural Networks
3.4. Proposed Method
3.5. Assessment of the Model
4. Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
- Initialise population with random solutions.
- Evaluate fitness of the population.
- While (stopping criterion not met)//forming new population.
- Select elite bees.
- Select sites for neighbourhood search.
- Recruit bees for selected sites (more bees for best e sites) and evaluate fitness.
- Select the fittest bee from each patch.
- Assign remaining bees to search randomly and evaluate their fitness.
- End while.
- Best features subset

Appendix B
- With the feature vector, produce the initial population.
- For a successful application, choose a suitable evaluation functions.
- Indicates whether reproduction is possible. Only the fittest individuals will inherit the best qualities.
- The crossover stage of simulated mating results in a generation that combines the best features from both parents.
- During reproduction, each child undergoes a mutation operation based on its genes. As a result, the children inherit the best characteristics of their parents.
- Once all the requirements are satisfied, the process is repeated with a newer population sector. As soon as the population reaches a maximum number of generations or the population reaches the optimal solution, the algorithm will stop.

References
- Horowitz, S.; Phadke, A. Power System Relaying; Research Studies Press: Somerset, UK, 1992. [Google Scholar]
- Faiz, J.; Heydarabadi, R. Diagnosing power transformers faults. Russ. Electr. Eng. 2014, 85, 785–793. [Google Scholar] [CrossRef]
- Sidhu, T.; Sachdev, M. Online identification of magnetizing inrush and internal faults in three-phase transformers. IEEE Trans. Power Deliv. 1992, 7, 1885–1891. [Google Scholar] [CrossRef]
- Phadke, A.; Thorp, J. A new computer-based flux-restrained current differential relay for power transformer protection. IEEE Trans. Power App. Syst. 1983, 11, 3624–3629. [Google Scholar] [CrossRef]
- Bastard, P.; Bertrand, P.; Meunier, M. A transformer model for winding fault studies. IEEE Trans. Power Deliv. 1994, 9, 690–699. [Google Scholar] [CrossRef]
- Gafoor, S.A.; Rao, P.R. Wavelet based fault detection, classify cation and location in transmission lines. In Proceedings of the 2006 IEEE International Power and Energy Conference, Putra Jaya, Malaysia, 28–29 November 2006; pp. 114–118. [Google Scholar]
- Rao, M.; Singh, B. Detection and localization of interturn fault in the HV winding of a power transformer using wavelets. IEEE Trans. Dielectr. Electr. Insul. 2001, 8, 652–657. [Google Scholar] [CrossRef]
- Bastard, P.; Meunier, M.; Regal, H. Neural network-based algorithm for power transformer differential relays. IEE Proc. Gener. Transm. Distrib. 1995, 142, 386–392. [Google Scholar] [CrossRef]
- Pihler, J.; Grcar, B.; Dolinar, D. Improved operation of power transformer protection using artificial neural network. IEEE Trans. Power Deliv. 1997, 12, 1128–1136. [Google Scholar] [CrossRef]
- Eissa, M.M. A Novel Digital Directional Transformer Protection Technique Based on Wavelet Packet. IEEE Trans. Power Deliv. 2005, 20, 1830–1836. [Google Scholar] [CrossRef]
- Jettanasen, C.; Pothisarn, J.; Klomjit, J.; Ngaopitakkul, A. Discriminating among inrush current, external fault and internal fault in power transformer using low frequency components comparison of DWT. In Proceedings of the 2012 15th International Conference on Electrical Machines and Systems (ICEMS), Sapporo, Japan, 21–24 October 2012; pp. 1–6. [Google Scholar]
- Ngaopitakkul, A.; Kunakorn, A.; Ngamroo, I. Discrimination between external short circuits and internal faults in transformer windings using discrete wavelet transforms. In Proceedings of the Fourtieth IAS Annual Meeting. Conference Record of the 2005 Industry Applications Conference, Hong Kong, China, 2–6 October 2005; Volume 1, pp. 448–452. [Google Scholar] [CrossRef]
- Ngaopitakkul, A.; Kunakorn, A. Internal fault classification in transformer windings using combination of discrete wavelet transforms and back-propagation neural networks. Int. J. Control Autom. Syst. 2006, 4, 365–371. [Google Scholar]
- Jettanasen, C.; Klomjit, J.; Positharn, C.; Bunjongjit, S.; Ngaopitakkul, A. Differential protection schemes for classification of fault detection between external fault and internal winding fault in transformer using probabilistic neural network. In Proceedings of the 2012 International conference on Fuzzy Theory and Its Applications (iFUZZY2012), Taichung, Taiwan, 16–18 November 2012; pp. 150–153. [Google Scholar] [CrossRef]
- Snedecor, G.W.; Cochran, W.G. The Sample Correlation Coefficient r and Properties of r. In 10.1–10.2 in Statistical Methods, 7th ed.; Iowa State Press: Ames, IA, USA, 1980; pp. 175–178. [Google Scholar]
- Spiegel, M.R. Correlation theory. In Theory and Problems of Probability and Statistics, 2nd ed.; Mcgraw-Hill: New York, NY, USA, 1992; pp. 294–323. [Google Scholar]
- Lü, S.-S.; Jiang, M.-S.; Su, C.-H.; Zhang, L.; Zhang, F.-Y.; Sui, Q.-M.; Jia, L. Novel phase difference extraction method of FPP system based on DWT and OMP algorithm. Optoelectron. Lett. 2020, 16, 131–136. [Google Scholar] [CrossRef]
- Singh, M.; Shaik, A.G. Broken Rotor Bar Fault Diagnosis of a Three-phase Induction Motor using Discrete Wavelet Transform. In Proceedings of the 2019 IEEE PES GTD Grand International Conference and Exposition Asia (GTD Asia), Bangkok, Thailand, 19–23 March 2019; pp. 13–17. [Google Scholar] [CrossRef]
- IEEE Standard C37.91-2000; IEEE Guide for Protective Relay Applications to Power Transformers. IEEE: Piscataway, NJ, USA, 2000.
- Chen, J.; Li, Z.; Pan, J.; Chen, G.; Zi, Y.; Yuan, J.; Chen, B.; He, Z. Wavelet transform based on inner product in fault diagnosis of rotating machinery: A review. Mech. Syst. Signal Process. 2015, 70–71, 1–35. [Google Scholar] [CrossRef]
- Subasi, A. Classification of EMG signals using PSO optimized SVM for diagnosis of neuromuscular disorders. Comput. Biol. Med. 2013, 43, 576–586. [Google Scholar] [CrossRef] [PubMed]
- Bontempo, R.N.; Bottom, W.P.; Weberp, E.U. Asynchronous motor cage fault detection through electromagnetic torque measurement. Eur. Trans. Electr. Power 1997, 17, 529–555. [Google Scholar]
- Elasha, F.; Greaves, M.; Mba, D.; Addali, A. Application of Acoustic Emission in Diagnostic of Bearing Faults within a Helicopter Gearbox. Procedia CIRP 2015, 38, 30–36. [Google Scholar] [CrossRef] [Green Version]
- Pham, D.T.; Castellani, M. A comparative study of the Bees Algorithm as a tool for function optimisation. Cogent Eng. 2015, 2, 1091540. [Google Scholar] [CrossRef]
- Boqiang, X.; Heming, L.; Liling, S. Feature signal extraction of inter-turn short circuit fault in stator windings of induction motors. In Proceedings of the 2002 IEEE International Conference on Industrial Technology, Bangkok, Thailand, 11–14 December 2002; Volume 1, pp. 97–100. [Google Scholar]
- Islam, R.; Khan, S.A.; Kim, J.M. Discriminant Feature Distribution Analysis-Based Hybrid Feature Selection for Online Bearing Fault Diagnosis in Induction Motors. J. Sens. 2016, 2016, 7145715. [Google Scholar] [CrossRef]
- Meyer, H.; Kühnlein, M.; Appelhans, T.; Nauss, T. Comparison of four machine learning algorithms for their applicability in satellite-based optical rainfall retrievals. Atmos. Res. 2016, 169, 424–433. [Google Scholar] [CrossRef]
- Fawzy, H.; Rady, E.H.A.; Fattah, A.M.A. Comparison between support vector machines and k-nearest neighbor for time series forecasting. J. Math. Comput. Sci. 2020, 10, 2342–2359. [Google Scholar]
- Seshadrinath, J.; Singh, B.; Panigrahi, B.K. Investigation of vibration signatures for multiple fault diagnosis in variable frequency drives using complex wavelets. IEEE Trans. Power Electron. 2014, 29, 936–945. [Google Scholar] [CrossRef]
- Moravej, Z. Evolving Neural Nets for Protection and Condition Monitoring of Power Transformer. Electr. Power Compon. Syst. 2005, 33, 1229–1236. [Google Scholar] [CrossRef]
- Yu, J.; Zhang, Z. Fault Diagnosis of Transformer Based on RBF Neural Network. Appl. Mech. Mater. 2014, 571–572, 201–204. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithms | Current Signal Data |
|---|---|
| BA | 12 |
| GA | 21 |
| 5-Fold Cross-Validation | SVM | ANN | KNN | (a) | 10-FoldCross-Validation | SVM | ANN | KNN | (b) |
| Accuracy | 0.93% | 0.62% | 0.86% | Accuracy | 0.96% | 0.76% | 0.93% | ||
| Specificity | 0.97% | 0.83% | 0.91% | Specificity | 0.98% | 0.88% | 0.91% | ||
| Precision | 0.85% | 0.58% | 0.83% | Precision | 0.88% | 0.74% | 0.88% | ||
| Sensitivity | 0.85% | 0.62% | 0.81% | Sensitivity | 0.87% | 0.72% | 0.87% | ||
| F1-Score | 0.77% | 0.57% | 0.76% | F1-Score | 0.78% | 0.64% | 0.85% |
| 5-Fold Cross-Validation | SVM | ANN | KNN | (a) | 10-FoldCross-Validation | SVM | ANN | KNN | (b) |
| Accuracy | 0.89% | 0.59% | 0.82% | Accuracy | 0.91% | 0.73% | 0.85% | ||
| Specificity | 0.86% | 0.85% | 0.97% | Specificity | 0.89% | 0.70% | 0.84% | ||
| Precision | 0.75% | 0.64% | 0.82% | Precision | 0.86% | 0.69% | 0.78% | ||
| Sensitivity | 0.87% | 0.57% | 0.75% | Sensitivity | 0.77% | 0.68% | 0.77% | ||
| F1-Score | 0.87% | 0.58% | 0.76% | F1-Score | 0.75% | 0.71% | 0.81% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abdusalam, O.; Ibrahim, A.; Anayi, F.; Packianather, M. New Hybrid Machine Learning Method for Detecting Faults in Three-Phase Power Transformers. Energies 2022, 15, 3905. https://doi.org/10.3390/en15113905
Abdusalam O, Ibrahim A, Anayi F, Packianather M. New Hybrid Machine Learning Method for Detecting Faults in Three-Phase Power Transformers. Energies. 2022; 15(11):3905. https://doi.org/10.3390/en15113905
Chicago/Turabian StyleAbdusalam, Othman, Alasmer Ibrahim, Fatih Anayi, and Michael Packianather. 2022. "New Hybrid Machine Learning Method for Detecting Faults in Three-Phase Power Transformers" Energies 15, no. 11: 3905. https://doi.org/10.3390/en15113905
APA StyleAbdusalam, O., Ibrahim, A., Anayi, F., & Packianather, M. (2022). New Hybrid Machine Learning Method for Detecting Faults in Three-Phase Power Transformers. Energies, 15(11), 3905. https://doi.org/10.3390/en15113905