1. Introduction
In urban logistics systems, for energy saving or reducing the pollution from combustion-engine vehicles, a large number of electric vehicles (EVs) are adopted to deliver the goods from depot to customers. The main objective of the electric vehicle routing problem (EVRP) is to improve the delivery efficiency and reduce the routing cost of EVs [
1,
2,
3].
To improve the delivery efficiency, the service time for customers should be considered [
4,
5,
6,
7,
8]. This means that each good should be delivered to its customer within a time slot. The time window is the scope of the time slot. If the good cannot be delivered within the time window, the penalty should be added to the routing cost [
4,
8]. So, the paper makes an investigation into EVRP with a time window.
To reduce the routing cost, the number of EVs and the EV energy consumption should be considered [
9,
10,
11,
12,
13]. The number of EVs influences the basic service cost in the routing schedule, and to reduce the routing cost, the number should be as small as possible. Due to vehicle battery limit, some EVs may not have enough battery and should be recharged in the delivery and the EV’s total electric energy consumption including both the EV travel energy consumption and the EV recharging energy consumption should be considered, which are the most important components in the routing cost [
9,
12]. So, this paper uses the EV’s total electric energy consumption as the objective function of the routing system.
For solving the EVRP, many modern heuristic optimization algorithms are applied, such as tabu search, neighborhood search, genetic algorithm, particle swarm algorithm, etc. [
4,
13,
14,
15,
16,
17]. Among these methodologies, the heuristic genetic algorithm (GA) method has proved to be a strong and effective algorithm [
4,
13,
16,
18].
While the traditional GA has problems of premature convergence and getting into local optimums [
19,
20,
21]. Its random initialization easily makes GA chromosomes premature. Its free iterative operation easily causes the GA trap into local optimization.
In recent years, neighborhood algorithms have been proposed and broadly used to improve the convergence of EVRP [
5,
22,
23,
24]. In this method, the routing system searches the route from the neighbor nodes rather than random nodes, which makes the route searching converge fast and easily into the optimum [
22,
24]. Inspired by the idea, the paper adopts the neighbor routing (NR) idea to improve the convergence of GA. While, how to define the neighbor scope and the node amount still has doubts in researchers [
25,
26,
27,
28]. With this background, the paper proposes the distance circle to define the neighbor scope with the circle radius to adjust the node amount, which is elaborated in
Section 4. The research finds that the value of the radius can impact the randomness of the routing system. With bigger radius, the system expresses more searching randomness due to the more amount of neighbor nodes (while this easily increases the difficulty of the NP problem and makes the system get into a local optimum). With smaller radius, the system searches the route faster due to the less amount of neighbor nodes; while the randomness declines. The paper applies the NR method in the initialization of the GA and achieves the good routing convergence.
At the end of each iteration of GA, there are partly numbers of chromosomes which have the top best fitness. They are called elitists in the GA system. These chromosomes may include the best optimal rout and should be inherited from the parent generation to the children generation [
14,
27,
29]. The paper adopts the elitist genetic algorithm (EGA) to evolve the optimal route and demonstrates the performance of the NR-EGA through a number of simulations.
The main contribution of this paper is summarized as follows:
The total EV energy consumption is used as the main component of the NR-EGA fitness in the selection, crossover, and mutation operation. The EV energy consumption can clearly express the usage of the EV battery power, making the NR-EGA more rational and applicable.
An improved NR algorithm in EGA initialization is proposed. The proposed distance circle embraces the first customer alternatives, which enable the NR-EGA to choose the close route from a suitable first customer in the initialization. This method makes the NR-EGA search the optimal node faster and obtain the better convergence.
A delivery example in Dallas, Texas, USA is carried out to make the deep simulation analysis. The simulation results verify the effective performance of the method.
2. Electric Vehicle Routing Problem with the Time Window
Delivery routing is from a depot to several customers, and the solution of the EVRP with time window is to find the minimum set of
M = {1, …,
m} EVs visiting all customers once and only once satisfying their demands, all starting from and ending at the depot, such that the total travel time (including driving time, and charging and waiting time at the electric recharging stations as shown in objective function (1)) and the total electric energy cost as shown in objective function (2) is minimized [
1].
Set the battery recharged rate is
r, the battery recharged time
can be calculated as
. In objective function (1), the values of the parameters
and
are 1 or 0 as shown in (3) and (4). The electric consumption
in objective function (2) can be calculated by combining the resistance power and electric power losses which is shown in
Section 3.
For calculating the objective functions (1) and (2), there are some constraints should be considered to satisfy the EVRP requirements [
4,
6,
7]. The first constraint regulates the delivery route of each EV as a closed curve. So, the sum of
should be a constant as shown in (5). The second constraint limits the total customer load-weights as shown in (6). The third constraint limits the maximum delivery time of each EV as shown in (7). The last two constraints rule the battery capacity of each EV during the whole delivery service as shown in (8) and (9).
3. Electric Energy Consumption
As the electric vehicle, the battery power is one of the most important features compared with conventional vehicles, so the electric energy consumption should be discussed in the EVRP problem.
The electric energy consumption is an integration of the power output at the battery terminals, which is equal to sum of the resistance power, the electric power losses in the transmission and the vehicle drive [
9,
10,
11,
12,
13,
29].
Let
v(
t) be vehicle travel speed (m/s);
η be efficiency parameter of power losses in vehicle transmissions;
m be vehicle mass (kg);
g be gravitational constant (m/s
2);
Cr be rolling resistance coefficient;
α be angle of the road;
ρ be air density (kg/m
3);
Ca be aerodynamic drag coefficient;
A be vehicle frontal area (m
2). The battery power output
Pout can be expressed as [
9,
12]:
In (10), the first term is the energy from the rolling resistance of tires; the second term is the energy from the grading resistance; the third one is the energy from the aerodynamic drag; the last one is the energy from the acceleration force [
9,
12,
13].
For analyzing the EVRP problem with the electric energy consumption model, some parameters can be supposed as constants such as η, ρ, g, Cr, A, Ca; other parameters such as m, v(t), α should be considered under different conditions.
The vehicle mass m includes the weight of an EV and the weight of its all-customer load. The larger the number of customers is, the bigger the vehicle mass m is when the routing starts. So, the vehicle mass has a great impact on the energy consumption as the EV starts the delivery service. With the increasing number of visited customers, m will be getting smaller due to the lighter load. It is necessary to consider all customer load in calculating the electric energy consumption.
The vehicle travel speed v(t) also has a great impact on the energy consumption, which is always variable and uncertain in the delivery service. For simplifying the EVRP problem, it is assumed to be constant during its travelling and to have linear acceleration/deceleration during its short start/stop period.
The angle α reflects the gradient of the road. It’s also variable in realistic environment. Its impact on the energy consumption depends on the number of slopes in the road map and the value of α. In the EVRP problem of this paper, the value of α in the road map is small and is assumed to be zero.
In the followed simulations, the parameters are set as η = 1, ρ = 1.29 kg/m3, g = 9.8 kg/m3, Cr = 0.015, A = 3.5 m2, Ca = 0.7. The EV’s no-load weight is 3500 kg. The total electric energy capacity of the EV is 30 kwh.
4. Elitist Genetic Algorithm with Improved Neighbor Routing Initialization
4.1. Neighbor Routing and the First Customer Alternatives
Initialization is the first searching process in the elitist genetic algorithm (EGA). In a real routing application, a vehicle often chooses the route from all closest customers. So, the routing system can make a search from all available neighboring routes, calculate their distances, then select the customer with the shortest route as the service priority [
5,
22,
23,
24].
The neighboring strategy gives the delivery route a relatively reasonable order. While, starting from the depot, the traditional GA will randomly select any customer as its first service object, sometimes, the first service customer is far distant from the depot, which can cause the total travel distance long and the total electrical energy consumption high [
25,
26,
27,
28]. While, the NR-EGA needs some stochastic behavior in it searching iterations. To solve this problem, the paper proposes the first customer selecting method in NR-EGA.
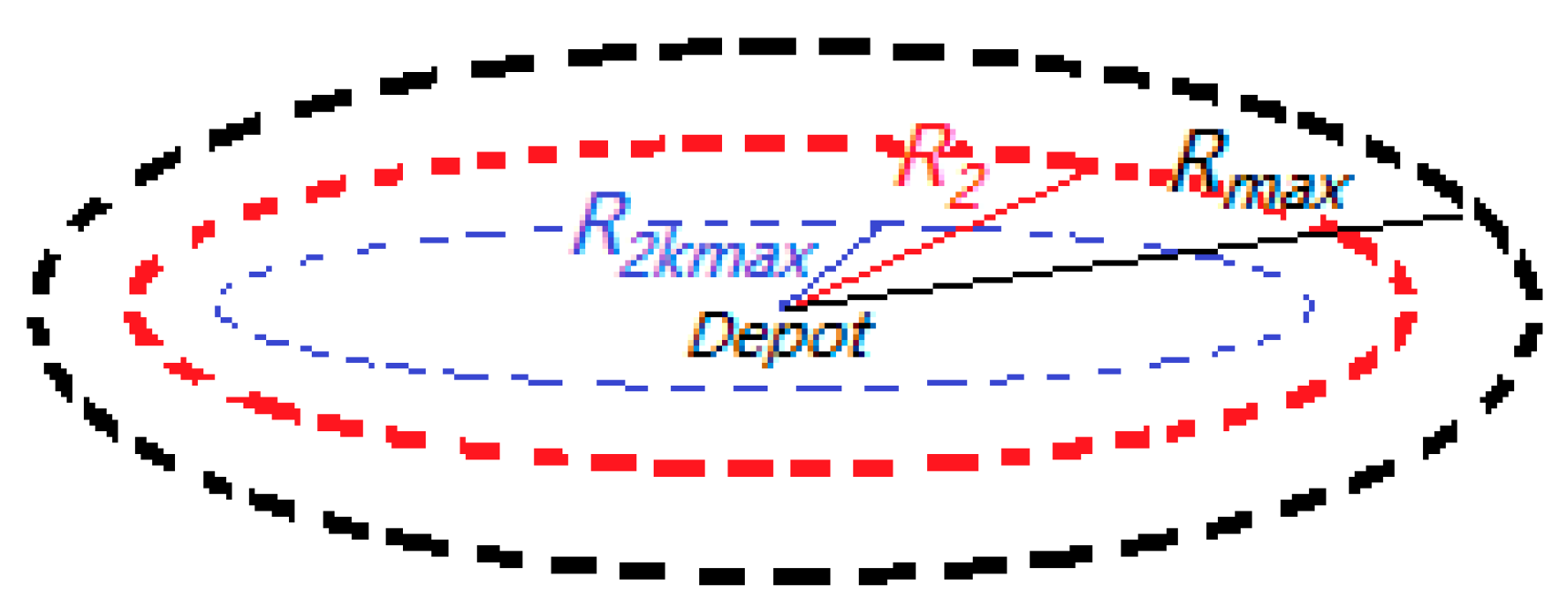
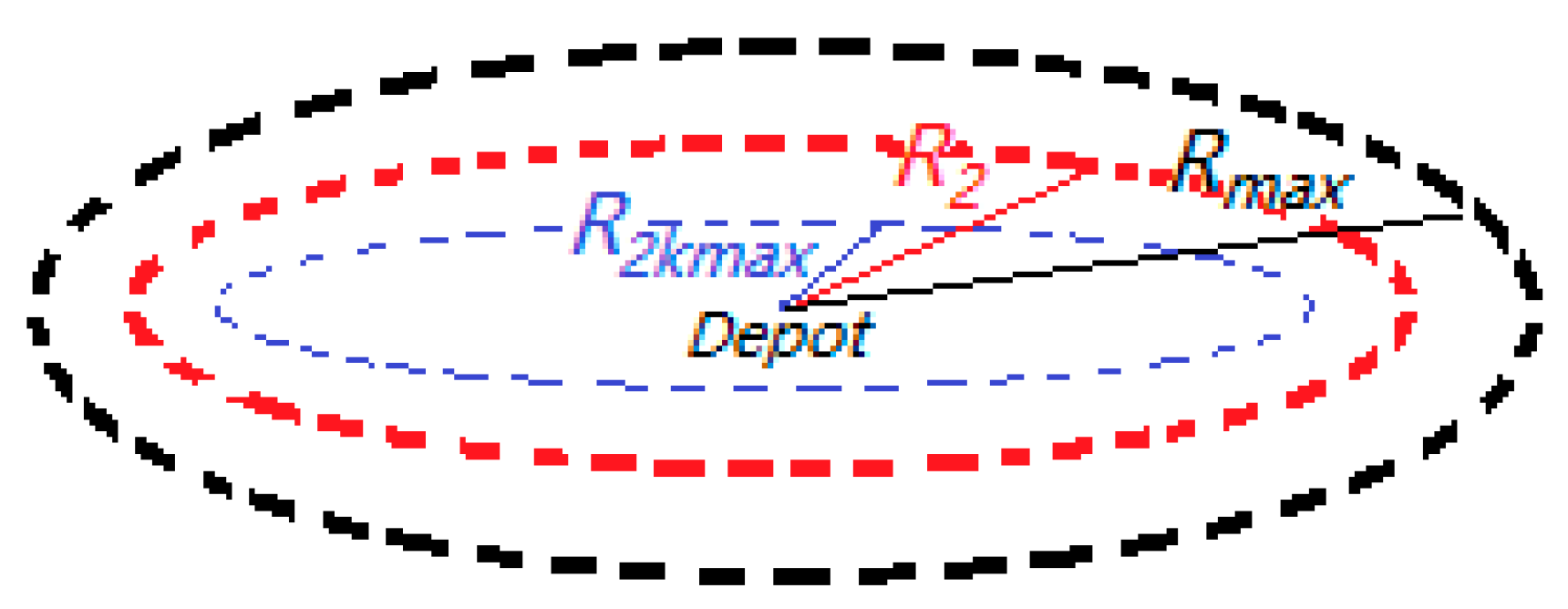
Firstly, the paper gives the scope for the first customer selecting. In
Figure 1, the radius
Rmax of the largest black circle is the farthest distance between the depot and customers. So, this circle embraces all customers. Obviously, for avoiding the farthest customers trapping into the first customer alternatives, the scope covers the first customer alternatives should be smaller than the black circle. In the
Figure 1, the middle red circle with the radius
R2 (
R2 <
Rmax) expresses the scope. The NR-EGA can randomly select the first customer in the circle.
The delivery route of each EV is a closed curve, each EV has two routes from and back to the depot; so at least
2k routes close to the depot available for
k EVs to select the first customer. Let
R2kmax be the farthest distance between the depot and the
2k closest customers, the scope of
R2 can be
R2kmax ≤
R2 <
Rmax as shown in
Figure 1.
The suitable
R2 can provide the effective first customer alternatives, at the same time, offer the NR-EGA appropriate stochastic behavior. The paper proposes the mean radius between the depot and all customers shown below
where
doi is the distance between the depot and customer
i. If
Rmean is less than
R2kmax, the NR-EGA will use
R2kmax, as
Rmean to avoid the low randomness of the chromosomes.
When the NR-EGA finishes the neighbor routing initialization with the suitable first customer, the routing system possess better chromosome orders for the optimization iterations.
4.2. Optimization Iterations
Each chromosome member in NR-EGA has the specified code sequence to do the optimization iterations. The digital sequence is usually used and composed with the depot, all customers and the charging stations [
5,
14,
27].
Table 1 shows the digital representation of a one depot, eight customers and one charging station example. If NR-EGA selects two EV to carry out the delivery service, each chromosome member will be the random assortment of these digital sequence as shown in
Figure 2. In
Figure 2, there are two delivery routes for the routing schedule: 0→2→4→6→7→0, 0→1→8→3→9→5→0. At the same time, the second EV is recharged after serving customer 3.
The objective of the NR-EGA in routing searching is to find the optimal digital sequence to obtain the minimum delivery cost. The delivery cost can be expressed as the sum of five cost functions [
1]:
In (12), the first two items give the energy cost and the recharging cost functions. They are calculated through (2). The third one gives the penalty cost function which can be calculated through (1). The last two items are the routing constraints. The fourth one limits the EV’s total customer load demands to satisfy the constraint (6). The fifth one provides enough battery power to finish the delivery services. They are calculated to satisfy the constraints (8) and (9). The parameters M1 and M2 are set to be large, e.g., to ensure the hard constraints.
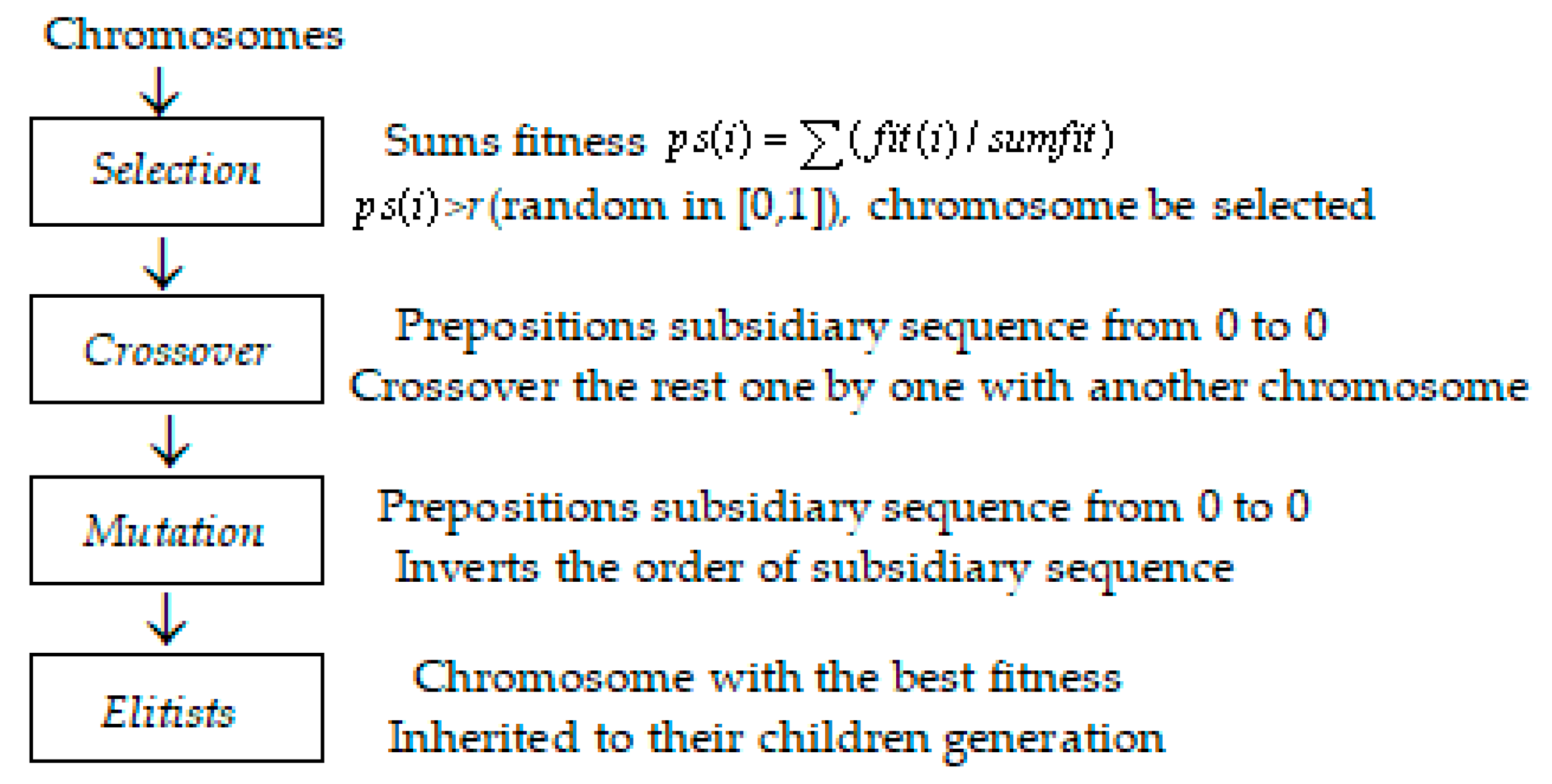
The optimization operation of the NR-EGA includes the selection, crossover, and mutation operations. All iterations rely on the fitness
of chromosomes. The NR-EGA inverses the cost function (12) as the fitness of chromosomes.
Figure 3 shows the optimization iteration operations of the NR-EGA.
5. Simulation Analysis Using Solomon Benchmark Data
For discussing the routing performance of the NR-EGA, the paper makes the simulation comparisons with Solomon benchmark VRPTW data [
30,
31,
32].
Six benchmark data are used: clustered customer sets (C201, C205), random customer sets (R201, R205), and random-clustered customer sets (RC201, and RC205). The paper selects 50 customers and 100 customers from them to do the comparison. As an example,
Table 2 shows the information of partial data in C205, wherein ‘Xcoord’ and ‘Ycoord’ are the coordinates of the customers; ‘Demand’ is the customers’ load capacity; ‘Ready Time’ and ‘Due Time’ are the time slot of customers’ time window; and ‘Service Time’ is the EV’s service time at each customer.
As all benchmark data have no electric vehicle parameters, the paper supplies two charging stations with coordinates [25, 43], [25, 60] to the data map. The parameters of these two charging stations are also shown in
Table 2 with No. 101 and 102. All parameters in
Table 2 have no unit, so the simulation is carried out using no-unit routing parameters shown in
Table 3.
After 500 optimizing iterations, the NR-EGA finds the optimal route. The compared performances between the NR-EGA and the algorithm [
31] are shown in
Table 4. In the table, the overall travel distances and the vehicle capacities in NR-EGA are less than those in the algorithm [
31]. The number of used vehicles is also smaller. The NR-EGA has more powerful performances.
In RC201 and RC205, when the customer number enhances from 50 to 100, the load capacity limitation also enhances. While, the limitations are still less than those in the algorithm [
31].
In order to analyze the affection of the electric energy consumption in NR-EGA, the paper compares the NR-EGA performances with two different fitness evaluation functions: travel distance as a fitness function and electric energy consumption as a fitness function, respectively.
Table 5 shows the comparison of the results.
Under the same constraints, the same number of EVs, the same recharging times, and the same load capacity, the NR-EGA with electric energy consumption as fitness evaluation function can search more suitable routes with fewer travel distances. For example, in data R201.50, using two EVs, with one recharging time, the NR-EGA with electric energy consumption as the fitness evaluation function consumes 80.5 total electric energy to find the optimal route. The total distance of the route is 542.6, less than 708.1 in the case with travel distance used as the fitness evaluation function.
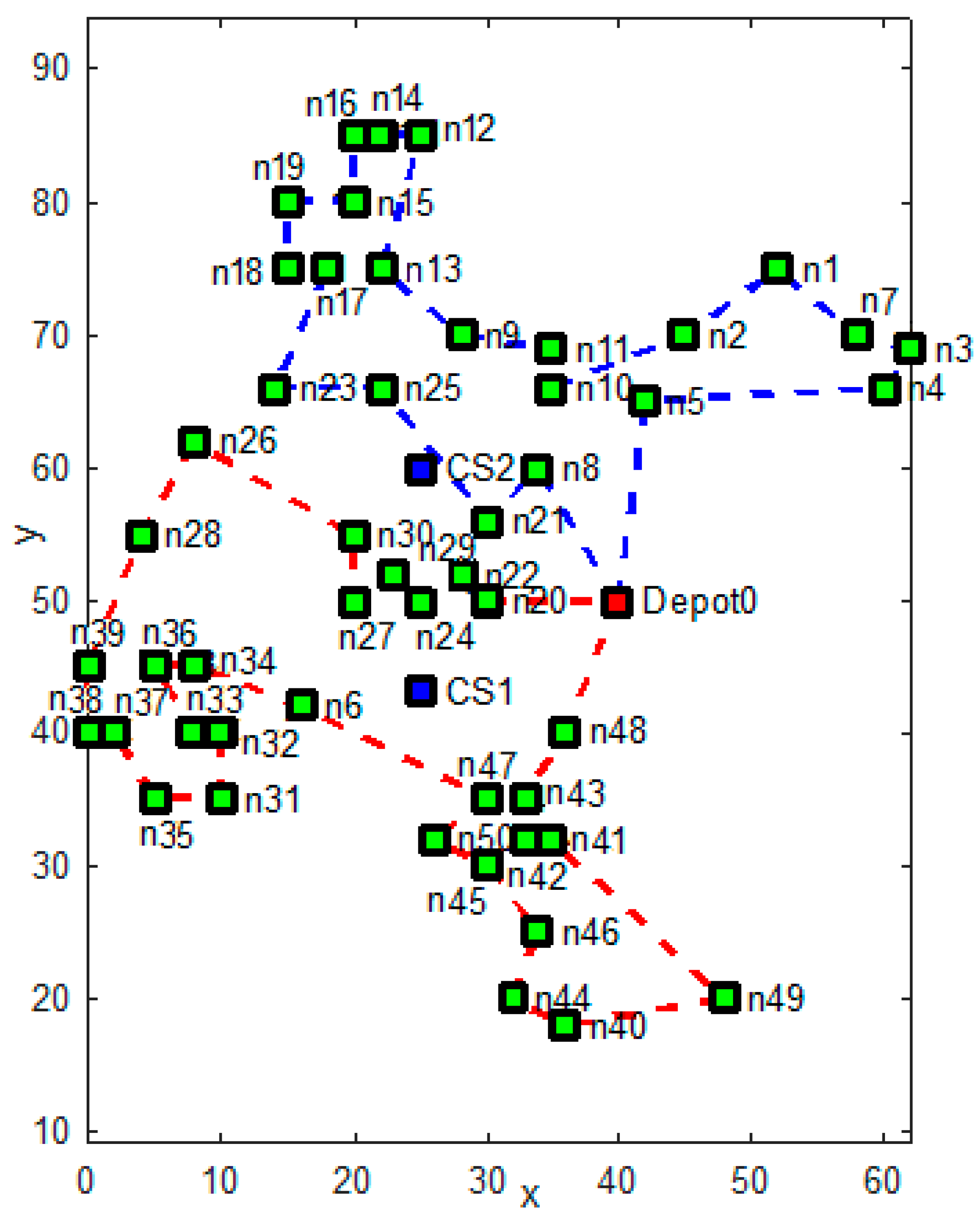
As an example, the NR-EGA with electric energy consumption as the fitness evaluation function carries out 500 optimizing iterations with 100 population on data sets C205.50, then finds the routing schedule shown in
Table 6. The schedule uses two EVs to make the delivery. The electric energy consumption on each EV is less than the limited electric energy 40. Thus, no EV needs to be recharged. The routes are drawn in
Figure 4 in two different colors.
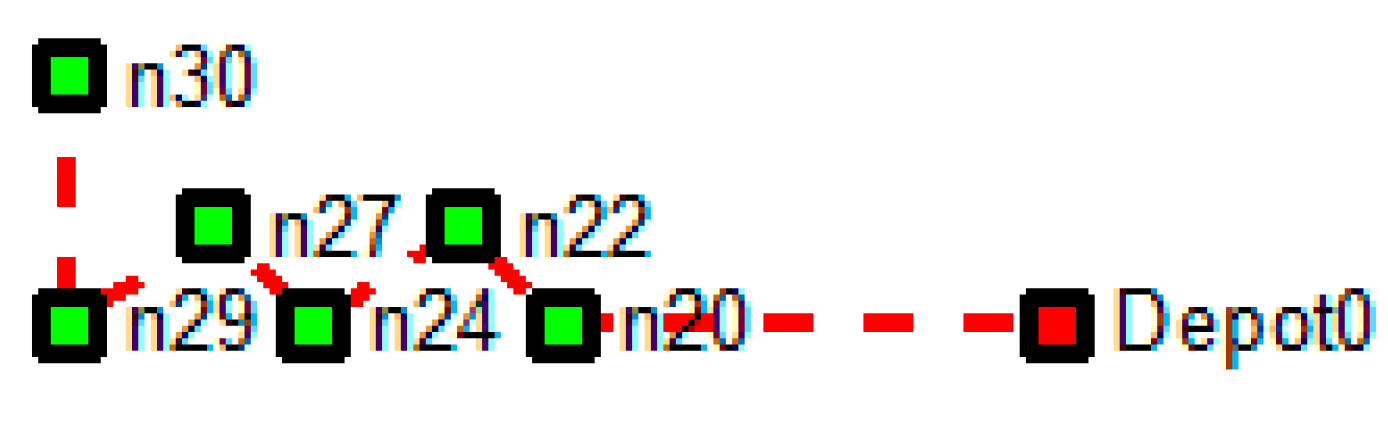
Load capacities of customers are the key element of vehicle mass
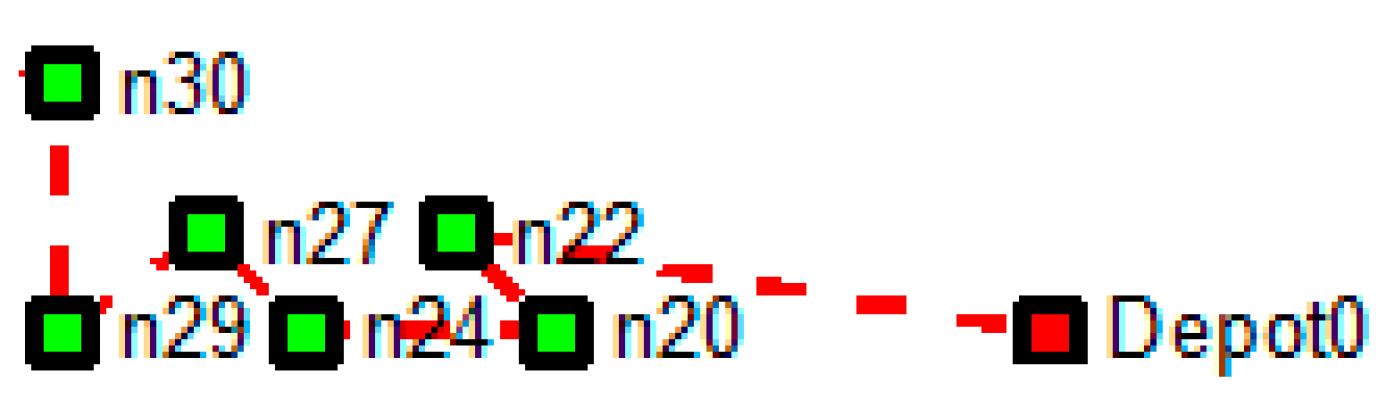
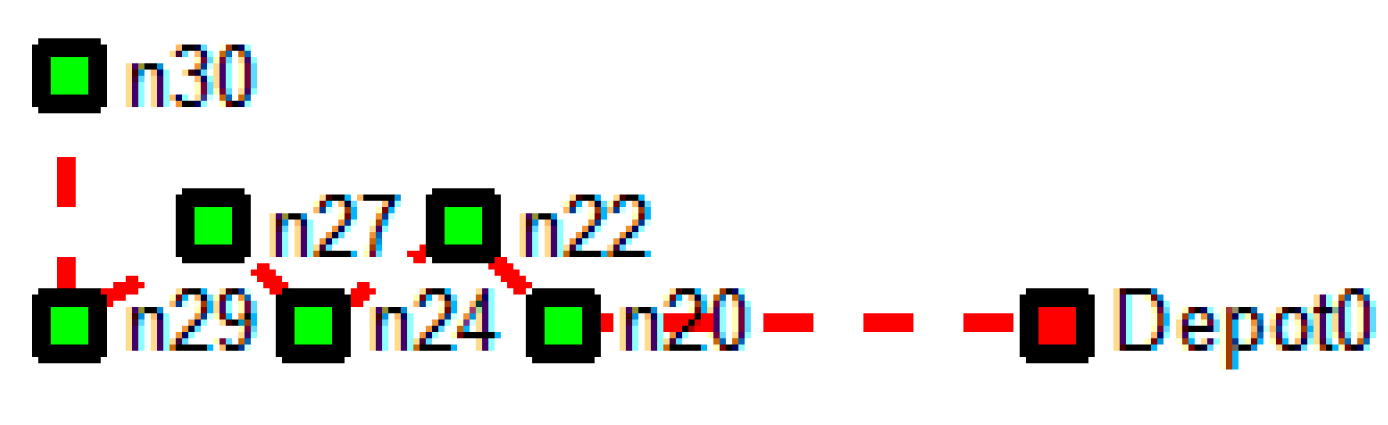
m in (10). The heavier the load capacity, the more electric energy EV will consume.
Figure 5 shows the partial route, 0→20→22→24→27→29→30…, of route 2. Their load demand is 10 or 20 as shown in
Table 2. For simulation analysis, change the load capacity of customer 22 from 20 to 50, then the optimal route of the NR-EGA is adjusted to 0→22→20→24→27→29→30…, for reducing the electric energy consumption, as shown in
Figure 6.
The customer 5, 20, 22, and 24 are close to the depot with early time windows as shown in
Table 2 and
Figure 4. They are set as the priority served customers in optimal route 1 and route 2 for reducing the punishment cost. The optimal routing schedule is reasonable and applicable.
6. NR-EGA Application to Hiland Dairy Delivery Service
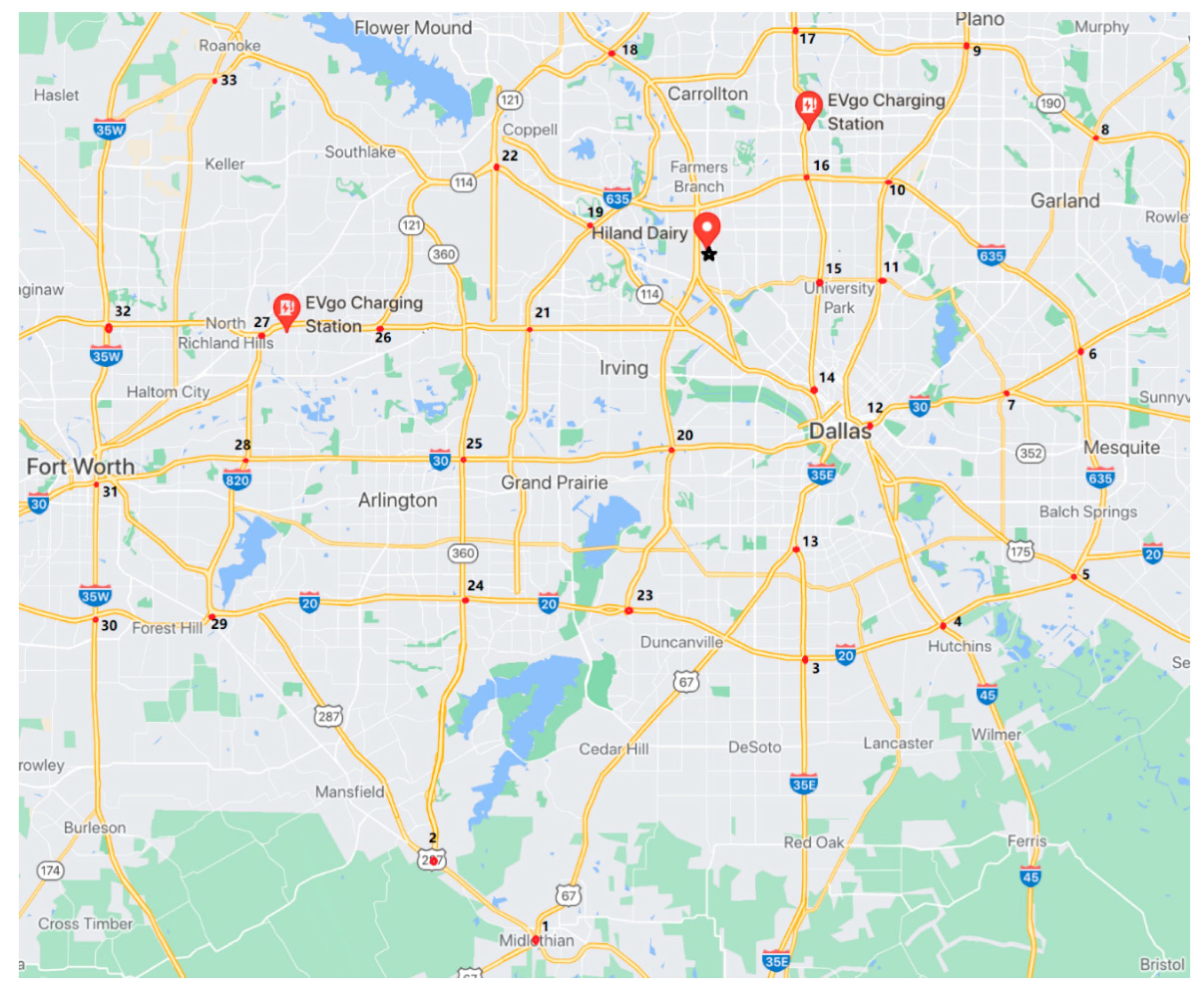
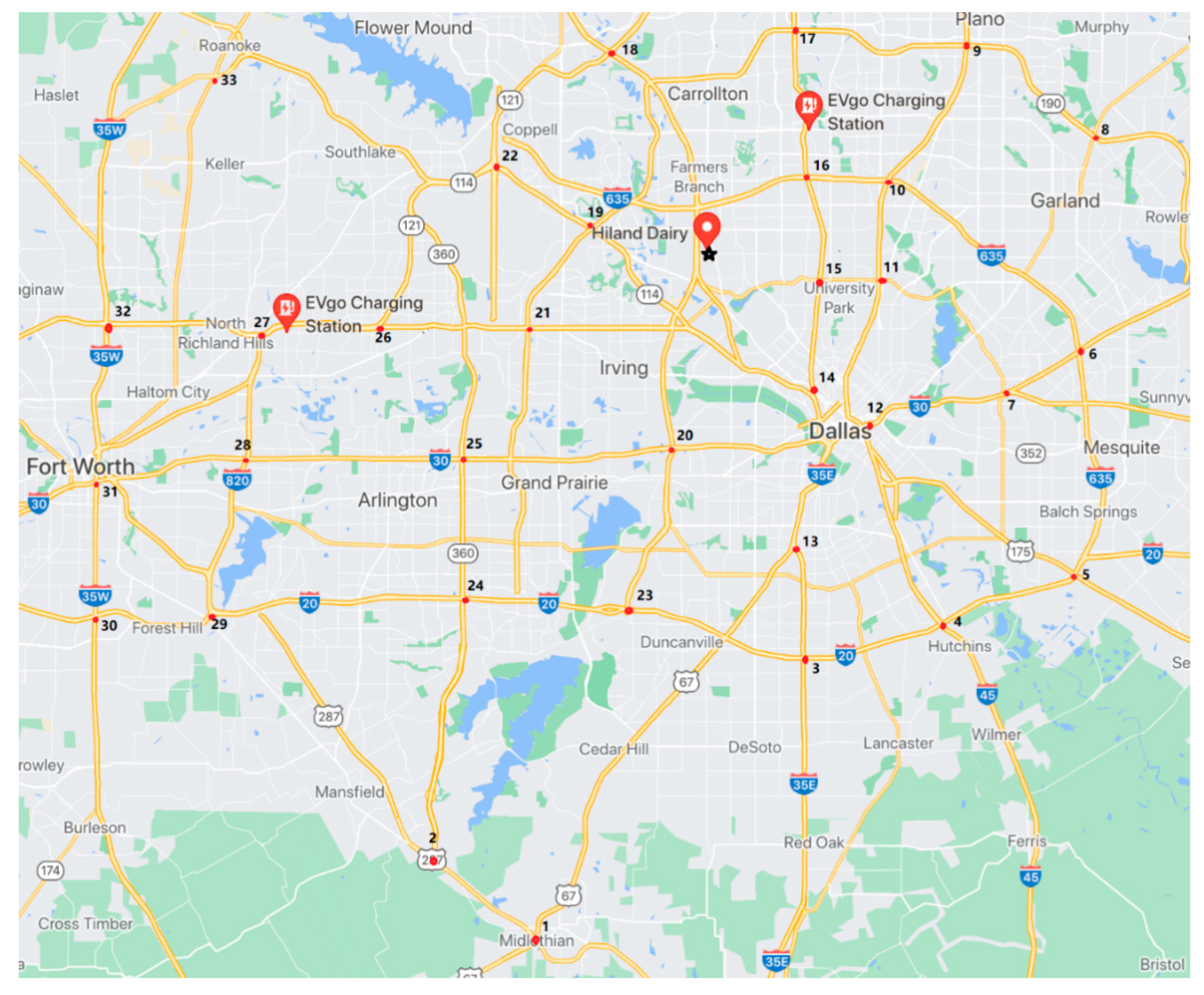
To testify the applicability of the NR-EGA, the paper discusses the delivery schedules of the Hiland Dairy milk delivery service in Dallas, Texas, USA.
Figure 7 shows the coordinates of the depot of the Hiland Dairy, two EVgo Charging stations and 33 customers in the google map. The customers are randomly distributed in [0–100 km, 0–100 km] regions with loose time window as [0, 24 h]. The Hiland Dairy uses EVs with constant speed 50 km/h to carry out the milk delivery. The EV’s service time at each customer is set as 10 min. The EV’s recharged time at the EVgo Charging Station is set as 40 min. The routing parameters are shown in
Table 7.
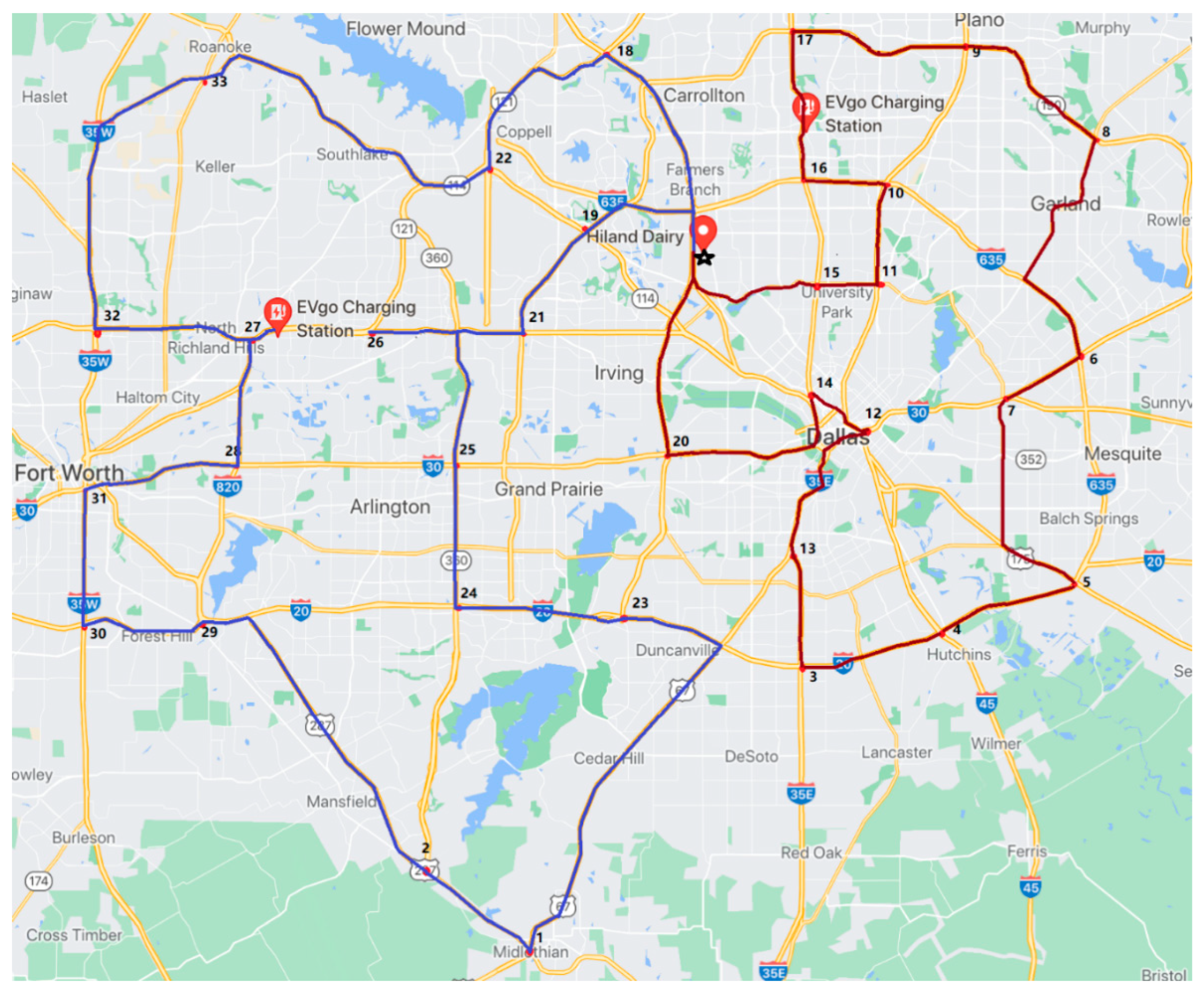
With 100 population, the NR-EGA carries out 500 optimizing iterations to find the optimal route. The performance results are shown in
Table 8 and
Figure 8.
In the
Figure 8, the NR-EGA designs two EV to carry out the milk delivery service. As the electric energy capacity of the EV is 30 kwh, each EV has once electric recharging at EVgo charging stations. Their total electric energy and total travel distances are shown in
Table 8. In the table, the first EV consumes more electric energy and needs more time for the delivery service. Including the recharging time, the first EV takes 9.5 h to carry out the delivery service for 17 customers, while the second EV takes 7.6 h for 16 customers.
7. Conclusions
The paper proposes an improved NR algorithm in EGA initialization based on the EV energy consumption. In the NR-EGA, the EV energy consumption is used as the main component of the NR-EGA fitness in the selection, crossover, and mutation operations. The NR-EGA chooses the close route from a suitable first customer in the initialization.
In the simulation with the Solomon benchmark data, the paper firstly uses the total route distances as the objective function to calculate the fitness of NR-EGA, and makes the simulation comparison between the NR-EGA and the algorithm [
31] with the results shown in
Table 4. The overall travel distances and the vehicle capacities in NR-EGA are less than those in the algorithm [
31]. The number of used vehicles is also fewer. The NR-EGA has better routing capability. Secondly, the paper analyzes the affection of the electric energy consumption in NR-EGA through the simulation comparison between the total travel distance as the fitness function and the electric energy consumption as the fitness function. The comparison results in
Table 5 shows the NR-EGA with electric energy consumption as the objective function can search more optimal routes with fewer travel distances. Thirdly, the paper discusses the affection of the load capacity on the NR-EGA routing. As the load capacity is one key factor for the electric energy consumption, changing the value will make the optimal route change as shown in
Figure 5 and
Figure 6. From all of the above benchmark simulation analyses, the NR-EGA was verified as an effective theoretical algorithm for EVRP.
Finally, the paper uses the Hiland Dairy milk delivery example in Dallas, Texas, USA in the simulation to verify the practicality of the method. A total of 33 customers are randomly distributed in [100 km, 100 km] region. For energy saving and improving the delivery efficiency, the NR-EGA makes 500 iterations to find the optimal routing schedule as shown in
Figure 8. The electric energy consumption of each EV, the total travel distances, and the delivery time are all reasonable and practical. The simulation performance of the NR-EGA verifies the application of the algorithm on express, postal service, delivery, logistics, and so on. For its realization and generalization, the algorithm will be tried to applied on some logistics software in the future research.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}