
Optimization of Train Energy Cooperation Using Scheduled Service Time Reserve


Abstract
:1. Introduction
2. Literature Review
- Line Planning Problem (LPP)—involves defining a set of train routes and their frequencies so that they meet customer expectations to the maximum extent. In order to formulate the mathematical problem, it is necessary to determine the linear and nodal elements of the infrastructure, the train running times, and the demand volume.
- Train Timetabling Problem or Train Scheduling Problem (TTP/TSP)—consists of determining, for a given set of trains, that the running frequency, the departure times from the departure station for each train, the arrival and departure time at each station in such a way that safety is ensured, minimum travel time and maximum profit are met. This problem can be considered in the context of both cyclic and non-cyclic timetables.
- Train Platforming Problem (TPP)—the solution to this problem makes it possible to work out the path of each train passing along the track layout of the station with the highest level of safety, taking into account minimal time intervals between particular vehicles.
- The Rolling Stock Circulation Problem (RSCP)—the solution to this problem is to assign each train a vehicle to provide a service in such a way that the cost of providing the service, as well as the amount of rolling stock required, is as low as possible.
- Planning the work of train operation crews—involves assigning train crews to planned trains at the lowest possible cost of task execution and taking into account a number of constraints.
- the real-time optimization of train traffic with a view to minimizing energy consumption and train delays;
- the optimization of driving techniques for train drivers;
- the optimization of the number of trains operating on the routes in terms of empty mileage costs; and
- the optimization of the work schedule of conductor crews and train crews, taking into account their maintenance costs.
3. Materials and Methods
3.1. Model
3.2. Optimization Algorithm
- tb(pi,sk)—technical operating time reserve used in timetable for i-th train p departing from k-th station sk,
- tb(pj,sk)—technical operating time reserve used in timetable for j-th train p arriving at k-th station sk.
- For case (a), when the real braking start time of the j-th train is later than the real start-up time of the i-th train, but simultaneously earlier than the real end time of the i-th train’s start-up and when the real braking end time of the j-th train is later than the real end time of the i-th train’s start-up:where:
- TRR(pi,sk)—actual time of the start-up initiation of the i-th train p to commercial speed vh, enabling the implementation of the timetable without secondary delays at station sk+1 (larger than TB(pi = j,sk)),
- TRH(pj,sk)—real time of braking initiation of the j-th train p from commercial speed vh, enabling the implementation of the timetable without secondary delays at station sk+1 (larger than TB(pi = j,sk)),
- TKR(pi,sk)—real time end of the start-up of i-th train p to commercial speed vh, enabling the implementation of the timetable without secondary delays in station sk+1 (bigger than TB(pi = j,sk)),
- TKH(pj,sk)—actual end time of braking of j-th train p from commercial speed vh, enabling the implementation of the timetable.
- the actual initiation time of the start-up phase of the i-th train TRR(pi,sk) can be determined from relation (2):where trrmax(pi,sk) is the latest possible start-up initiation time for the i-th train departing from the k-th station sk.
- the actual initiation time of the braking phase of the j-th train TRH(pj,sk) can be determined by means of relation (4):where is the latest possible braking initiation time for the j-th train entering the k-th station sk,
- the real end time of the start-up phase of the i-th train TKR(pi,sk) can be determined from relation (3):where is the earliest possible start-up end time for the i-th train p departing from the k-th station sk
- the actual end time of the braking phase of the j-th train TRH(pj,sk) can be determined by means of relation (5):where is the earliest possible braking end time for the j-th train entering the k-th station sk.
- 2.
- For case (b), when the actual braking initiation time of the j-th train is earlier than the real start-up initiation time of the i-th train and, at the same time, when the start-up end time of the i-th train is earlier than the actual braking end time of the j-th train:
- 3.
- For case (c), when the real start-up initiation time of the j-th train is later than the real initiation time of the i-th train’s breaking, but is simultaneously earlier than the real end time of the i-th train’s braking and when the real end time of the j-th train’s start-up is later than the real end time of the i-th train’s braking:
- 4.
- For case (d), when the real start-up initiation time of the i0-th train is earlier than the real braking initiation time of the j-th train and, simultaneously, when the real braking end time of the j-th train is later than the real start-up end time of the i-th train:
4. Results
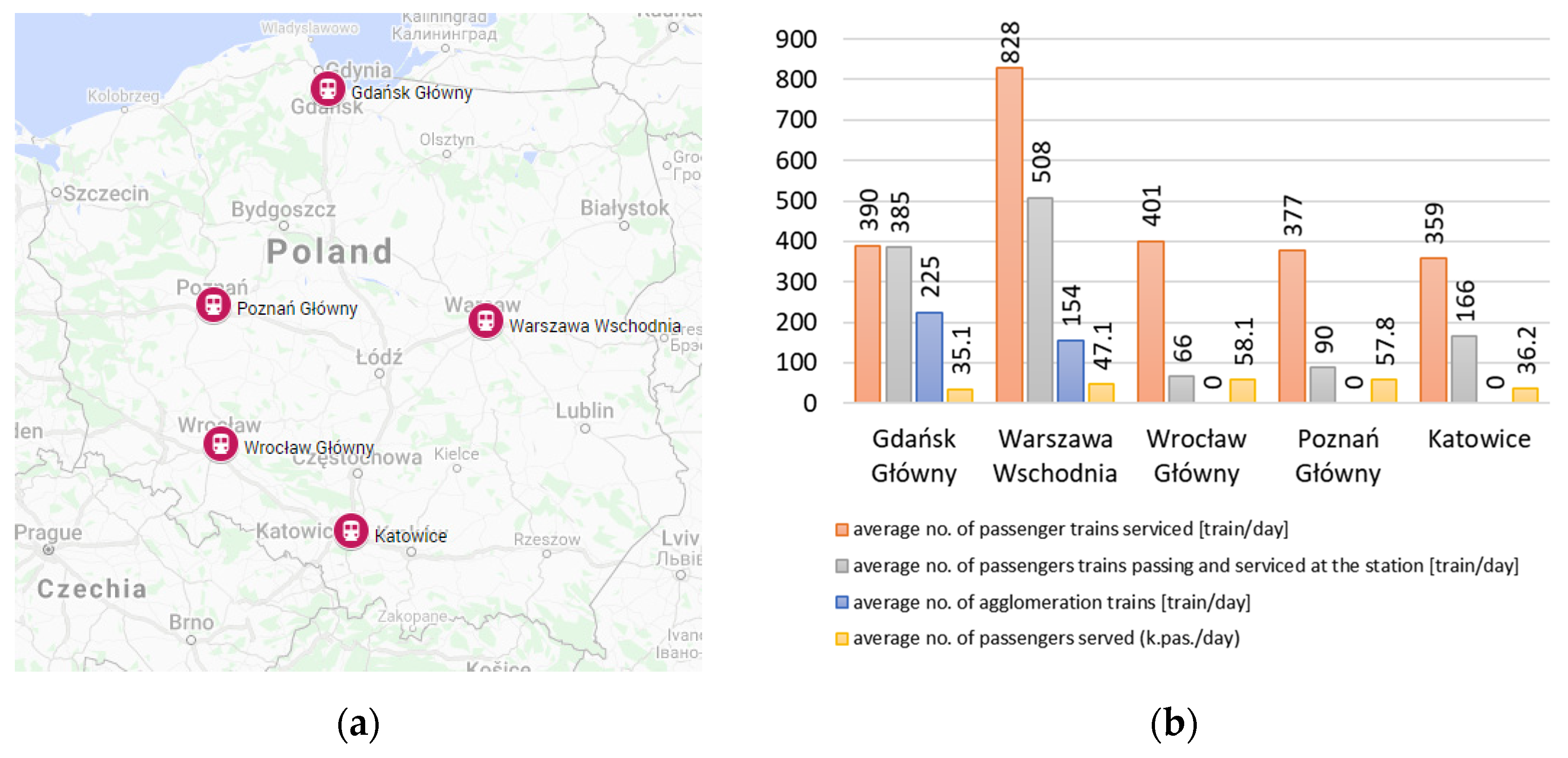
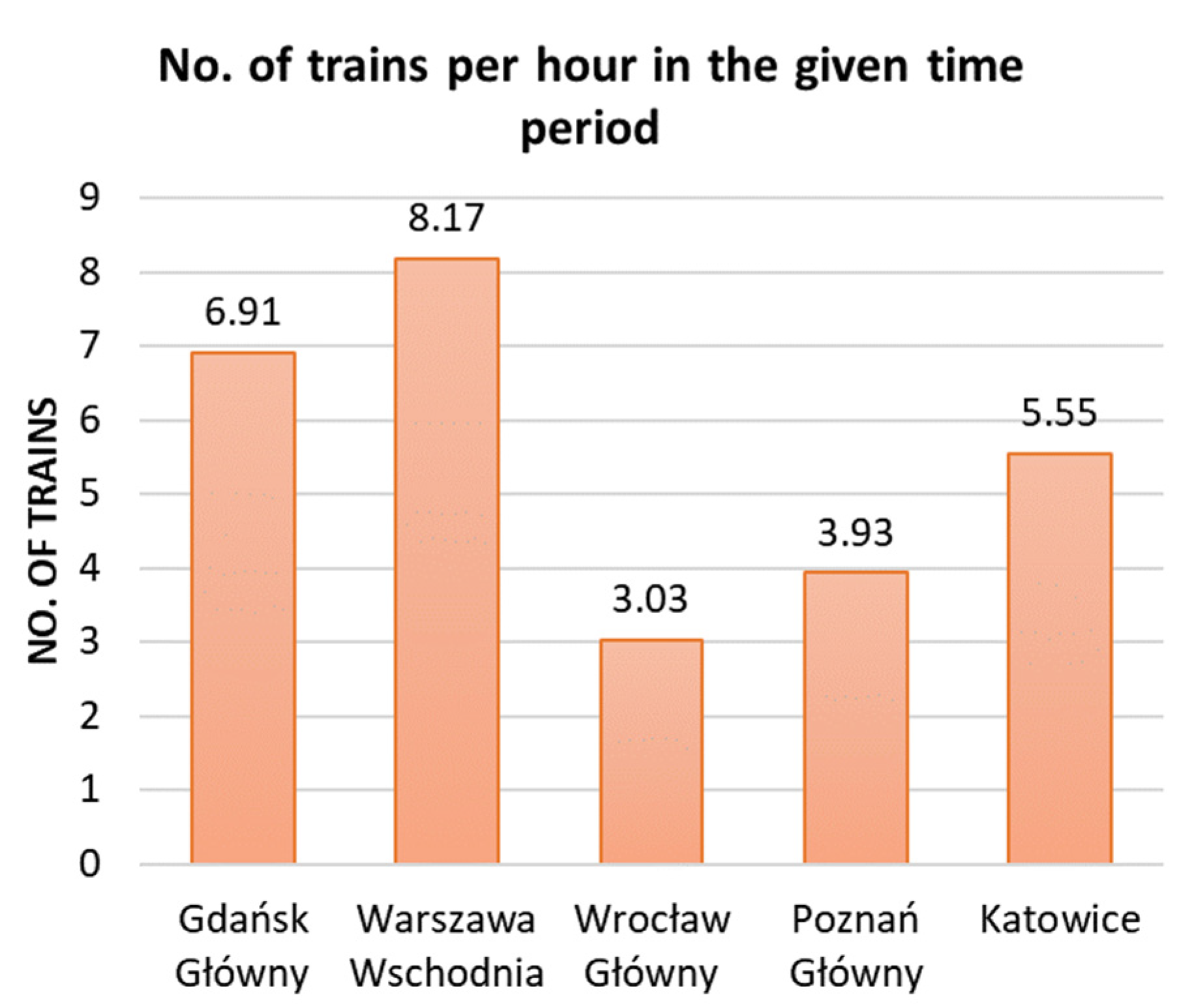
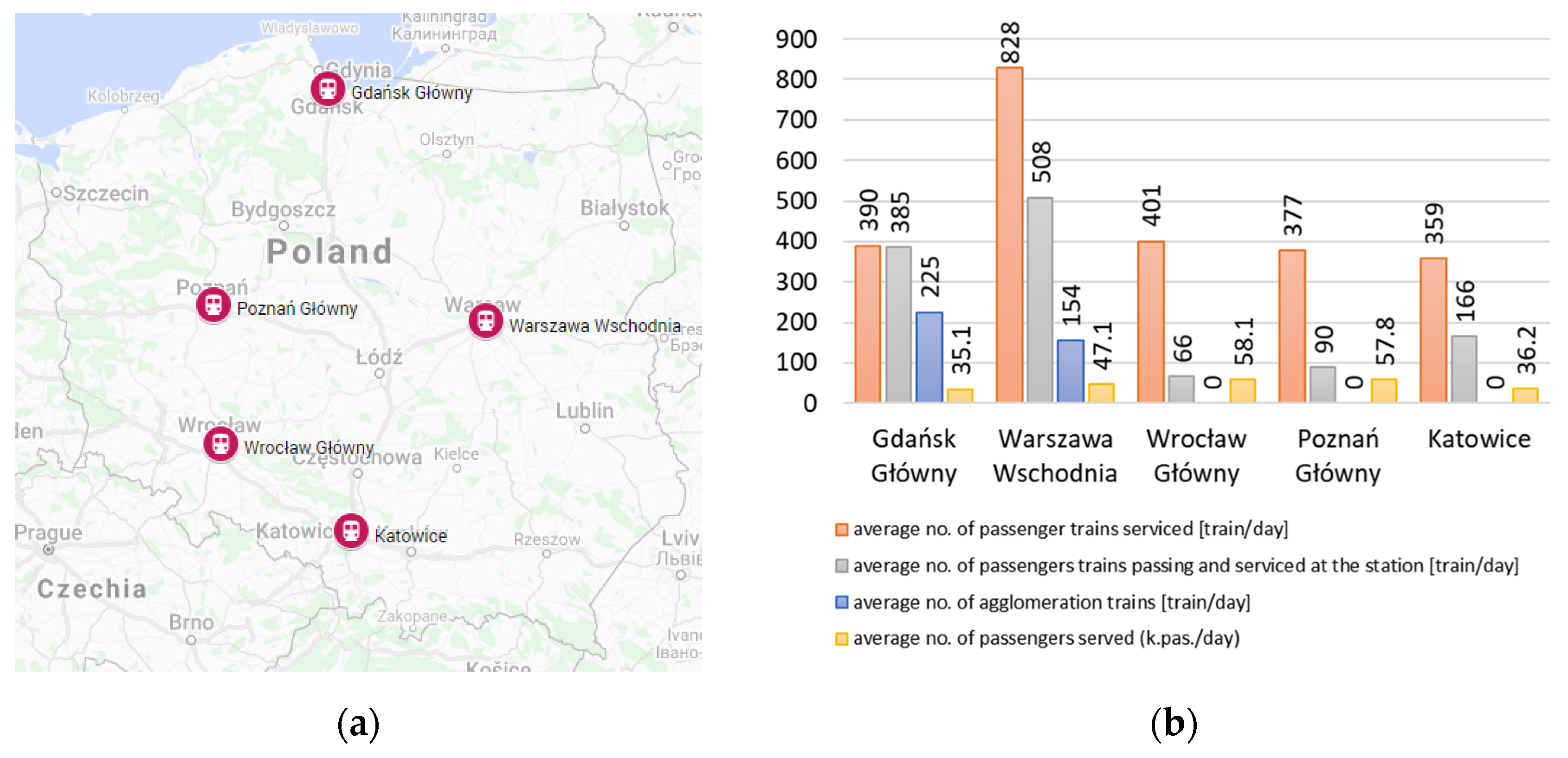
4.1. General Assumptions and Data
- Gdańsk Główny railway station,
- Warszawa Wschodnia railway station,
- Wrocław Główny railway station,
- Poznań Główny railway station,
- Katowice railway station.
- Provincial agglomeration transport: SKM (Fast Urban Rail in Tri-city), SKW (Fast Warsaw Rail),
- National Provincial: R (Regio), KM (Kolej Mazowiecka), KD (Kolej Dojazdowa), KW (Kolej Wielkopolska), KS (Koleje Śląskie)
- National Provincial fast trains: TLK (Twoje Linie Kolejowe), IC (Inter City),
- Express Inter City: EIC (Express InterCity), EIP (Ekspress Intercity Premium).
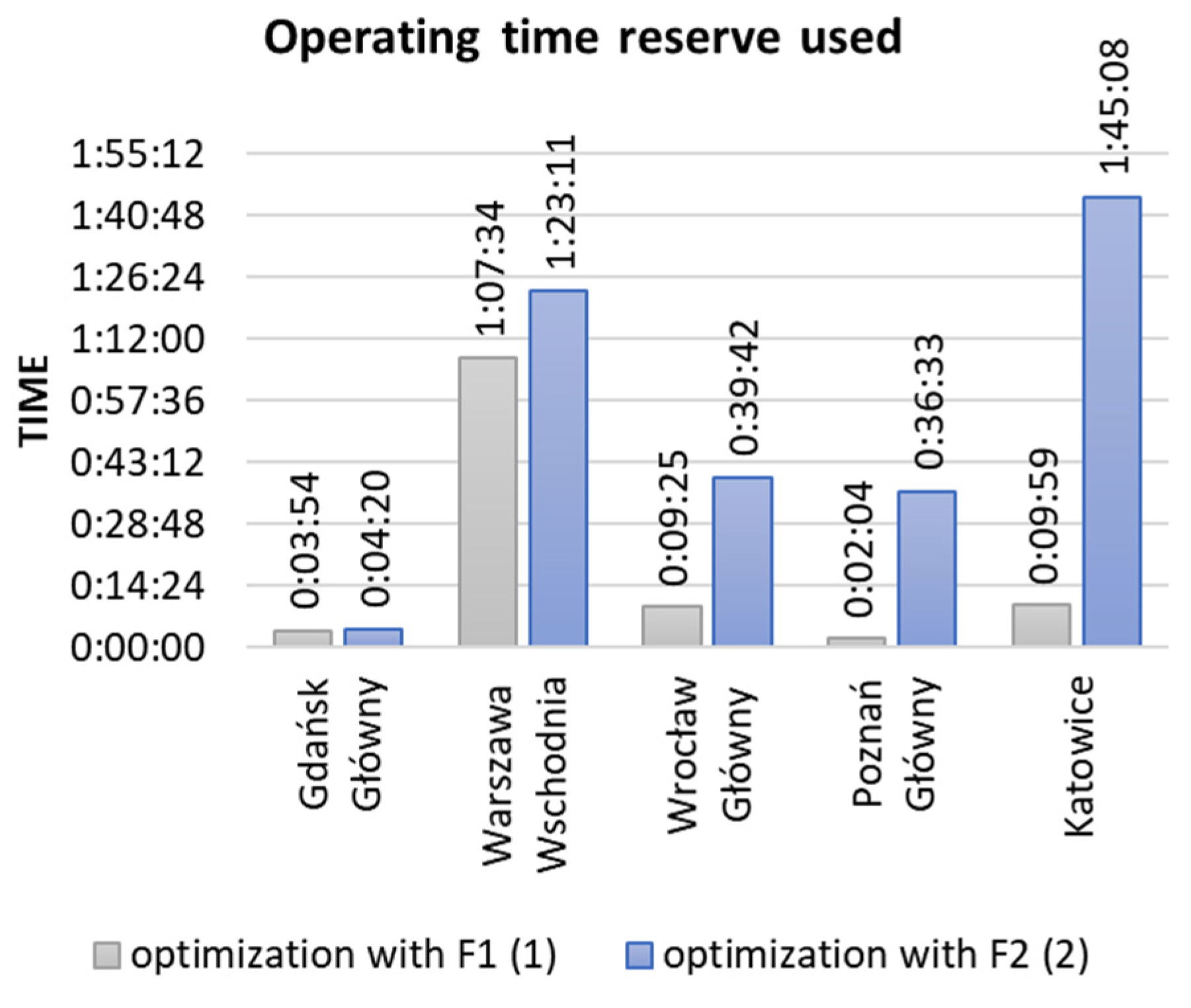
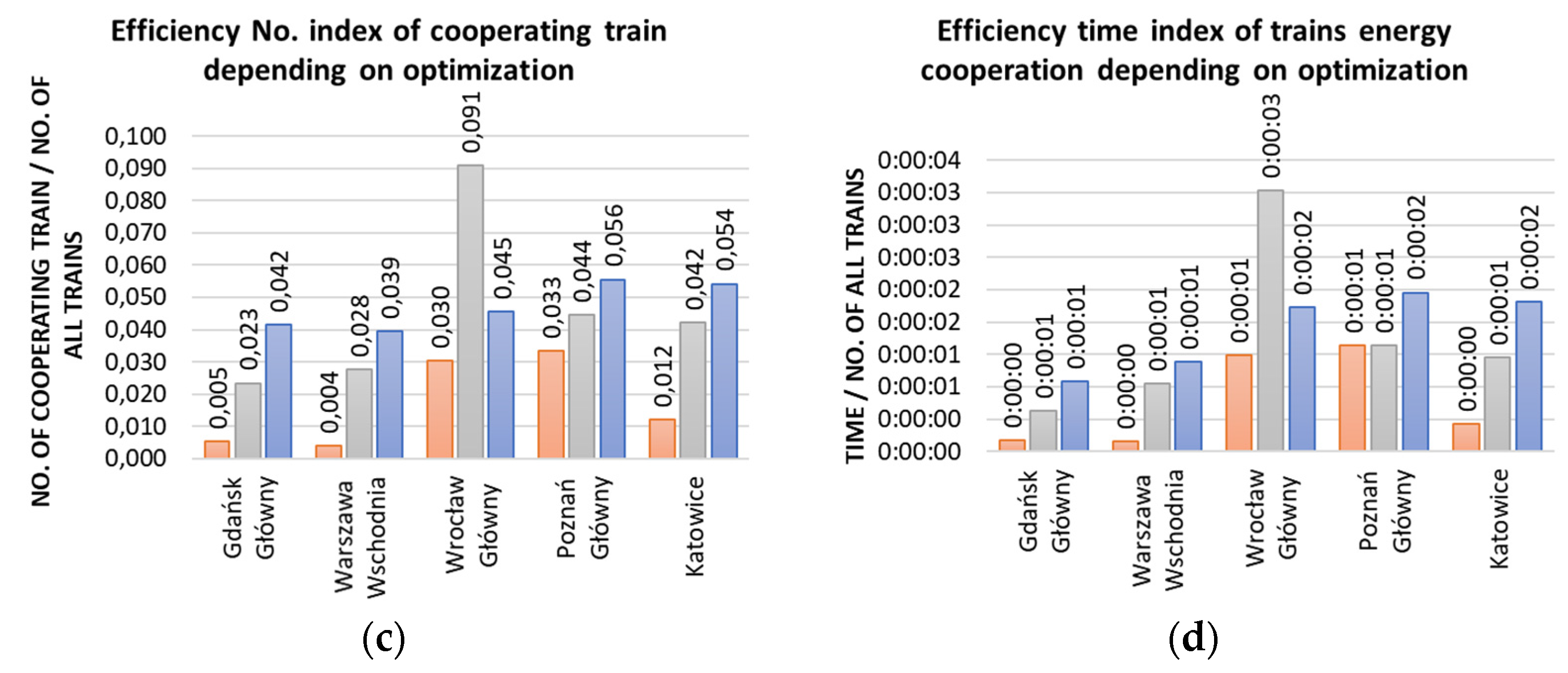
4.2. Single-Criterion Optimization
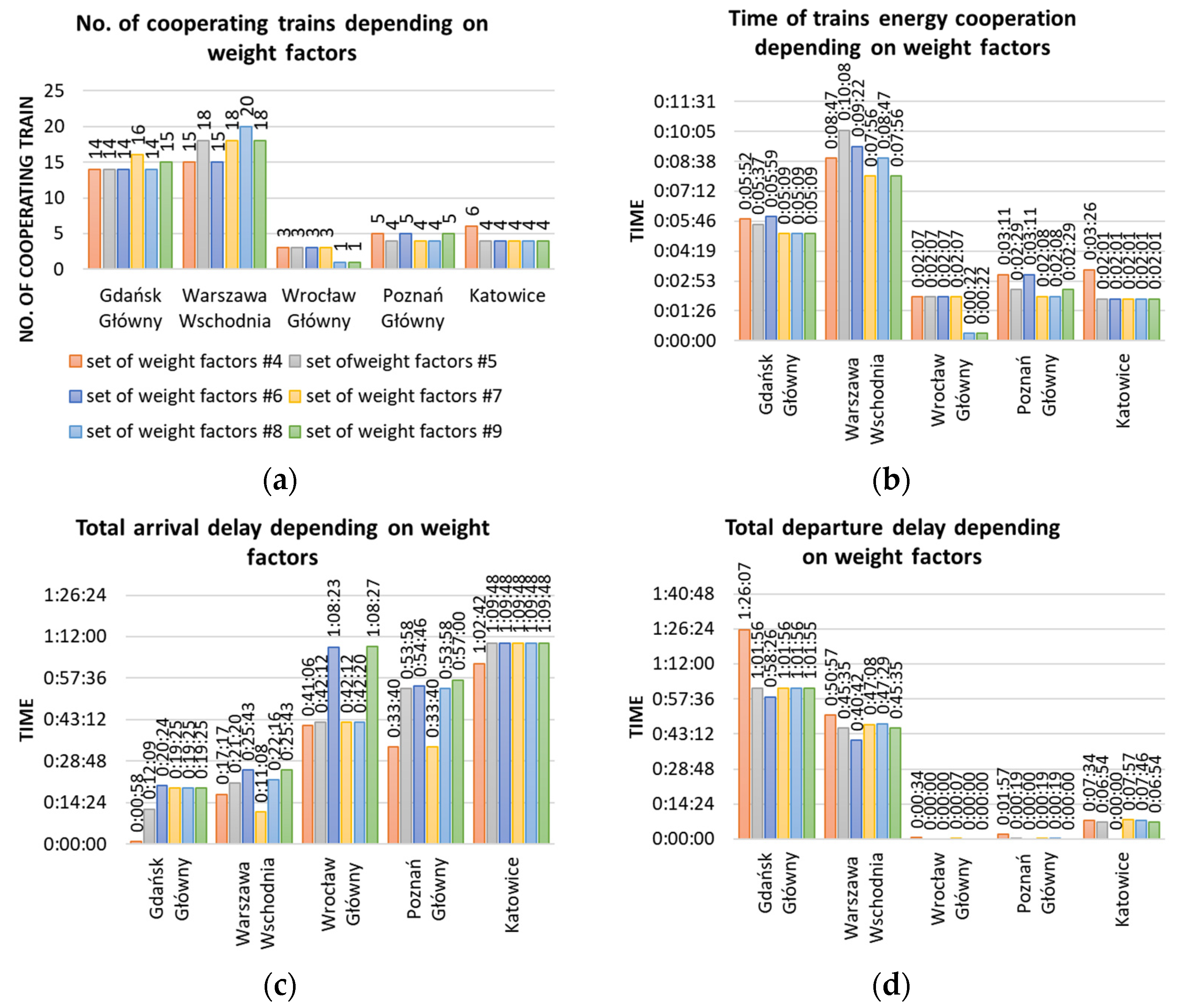
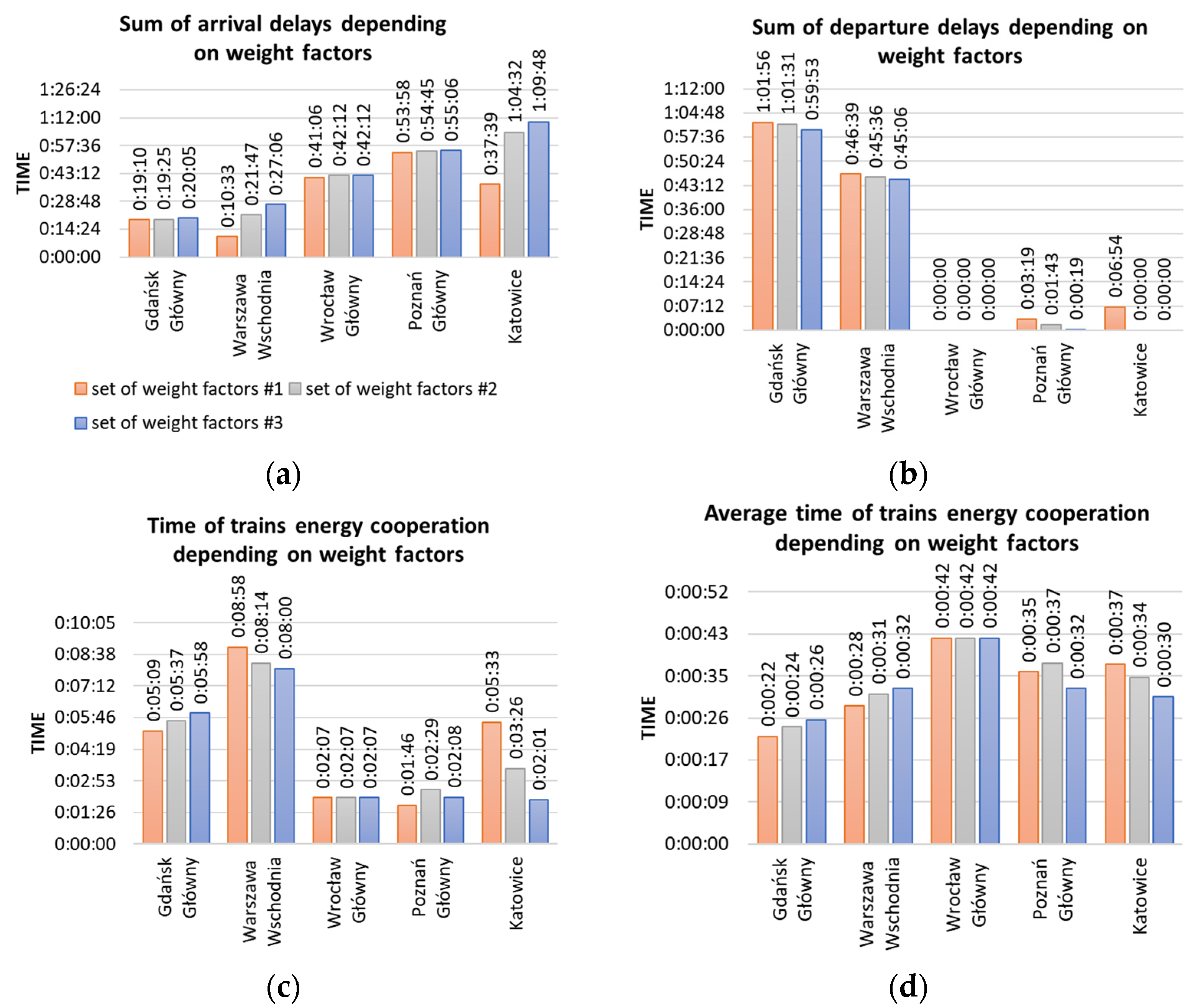
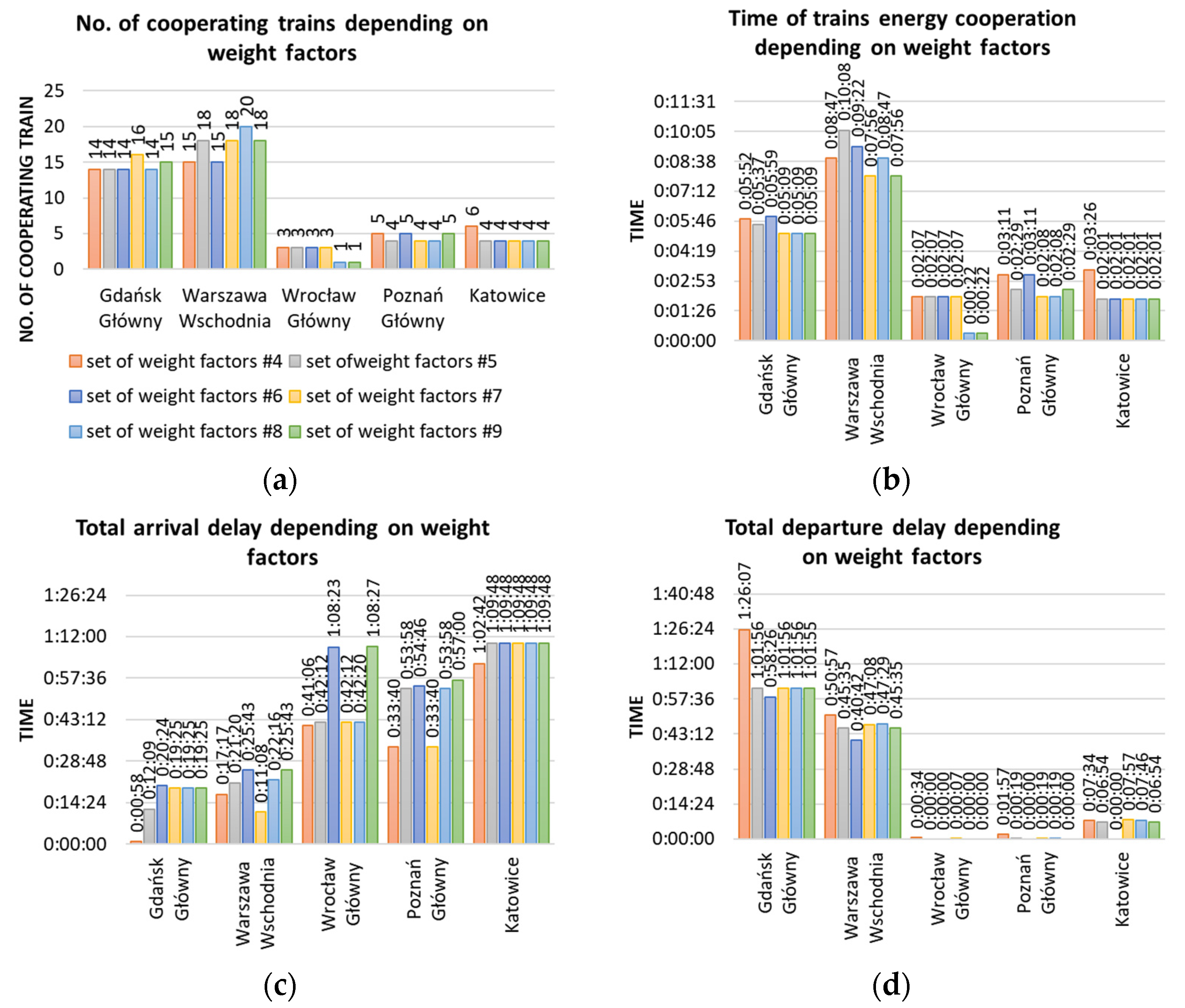
4.3. Multi-Criteria Optimization
5. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- European Environment Agency. Adaptation of Transport to Climate Change in Europe; EEA Report no 8/2014; European Environment Agency: Luxemburg, 2014. [Google Scholar]
- Batrancea, I.; Batrancea, L.; Nichita, A.; Gaban, L.; Masca, E.; Fatacean, G.; Moscviciov, A. An Econometric Approach on Production, Costs and Profit in Romanian Coal Mining Enterprises. Econ. Res.-Ekon. Istraz. 2019, 32, 1019–1063. [Google Scholar] [CrossRef] [Green Version]
- Ma, F.; Wang, W.; Sun, Q.; Liu, F.; Li, X. Ecological Pressure of Carbon Footprint in Passenger Transport: Spatio-Temporal Changes and Regional Disparities. Sustainability 2018, 10, 317. [Google Scholar] [CrossRef] [Green Version]
- Moretti, L.; Loprencipe, G. Climate Change and Transport Infrastructures: State of the Art. Sustainability 2018, 10, 4098. [Google Scholar] [CrossRef] [Green Version]
- Gaj, K.; Miller, U.; Sówka, I. Progressing Climate Changes and Deteriorating Air Quality as One of the Biggest Challenges of Sustainable Development of the Present Decade in Poland. Sustainability 2020, 12, 6367. [Google Scholar] [CrossRef]
- Izdebski, M.; Jacyna, M. An Efficient Hybrid Algorithm for Energy Expenditure Estimation for Electric Vehicles in Urban Service Enterprises. Energies 2021, 14, 2004. [Google Scholar] [CrossRef]
- European Commision. Roadmap to a Single European Transport Area—Towards a Competitive and Resource Efficient Transport System; European Commision: Brusseles, Belgium, 2011. [Google Scholar]
- European Commision. Sustainable and Smart Mobility Strategy—Putting European Transport on Track for the Future; European Commision: Brusseles, Belgium, 2011. [Google Scholar]
- Batrancea, I.; Batrancea, L.; Maran Rathnaswamy, M.; Tulai, H.; Fatacean, G.; Rus, M.-I. Greening the Financial System in USA, Canada and Brazil: A Panel Data Analysis. Mathematics 2020, 8, 2217. [Google Scholar] [CrossRef]
- Batrancea, L. An Econometric Approach Regarding the Impact of Fiscal Pressure on Equilibrium: Evidence from Electricity, Gas and Oil Companies Listed on the New York Stock Exchange. Mathematics 2021, 9, 630. [Google Scholar] [CrossRef]
- García-Olivares, A.; Solé, J.; Samsó, R.; Ballabrera-Poy, J. Sustainable European Transport System in a 100% Renewable Economy. Sustainability 2020, 12, 5091. [Google Scholar] [CrossRef]
- Popescu, M.; Bitoleanu, A. A Review of the Energy Efficiency Improvement in DC Railway Systems. Energies 2019, 12, 1092. [Google Scholar] [CrossRef] [Green Version]
- Iannuzzi, D.; Pagano, E.; Tricoli, P. The Use of Energy Storage Systems for Supporting the Voltage Needs of Urban and Suburban Railway Contact Lines. Energies 2013, 6, 1802–1820. [Google Scholar] [CrossRef] [Green Version]
- Mayrink, S., Jr.; Oliveira, J.G.; Dias, B.H.; Oliveira, L.W.; Ochoa, J.S.; Rosseti, G.S. Regenerative Braking for Energy Recovering in Diesel-Electric Freight Trains: A Technical and Economic Evaluation. Energies 2020, 13, 963. [Google Scholar] [CrossRef] [Green Version]
- Jacyna, M.; Szczepański, E.; Izdebski, M.; Jasiński, S.; Maciejewski, M. Characteristics of event recorders in Automatic Train Control systems. Arch. Transp. 2018, 46, 61–70. [Google Scholar] [CrossRef]
- González-Gil, A.; Palacin, R.; Batty, P. Sustainable urban rail systems: Strategies and technologies for optimal management of regenerative braking energy. Energy Convers. Manag. 2013, 75, 374–388. [Google Scholar] [CrossRef] [Green Version]
- Urbaniak, M.; Kardas-Cinal, E.; Jacyna, M. Optimization of Energetic Train Cooperation. Symmetry 2019, 11, 1175. [Google Scholar] [CrossRef] [Green Version]
- Urbaniak, M.; Kardas-Cinal, E. Optimization of using recuperative braking energy on a double-track railway line. Transp. Res. Procedia 2019, 40, 1208–1215. [Google Scholar] [CrossRef]
- Caprara, A.; Fischetti, M.; Toth, P. Modelling and Solving the Train Timetabling Problem. Oper. Res. 2002, 50, 851–861. [Google Scholar] [CrossRef]
- Laporte, G.; Barnhart, C. Handbooks in Operations Research and Management Science: Transportation; Elsevier: Amsterdam, The Netherlands, 2007; Volume 14, 784p. [Google Scholar]
- Peeters, L. Cyclic Railway Timetable Optimization; Erasmus Research Institute of Management: Rotterdam, The Netherlands, 2003. [Google Scholar]
- Albrecht, T.; Oettich, S. A New Integrated Approach to Dynamic Schedule Synchronization and Energy Saving Train Control, Computers in railways VIII; WIT Press: Southampton, UK, 2002; pp. 847–856. [Google Scholar]
- Bengtsson, L.; Galia, R.; Gustafsson, T.; Hjorring, C.; Kohl, N. Railway Crew Pairing Optimization. In Algorithmic Methods for Railway Optimization; Geraets, F., Kroon, L., Schoebel, A., Wagner, D., Zaroliagis, C.D., Eds.; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2007; Volume 4359, pp. 126–144. [Google Scholar]
- Bocharnikov, Y.V.; Goodman, C.J.; Hillmansen, S.; Roberts, C.; Tobias, A.M. Optimal driving strategy for traction energy saving on DC suburban railways. Electr. Power Appl. 2007, 5, 675–682. [Google Scholar] [CrossRef]
- Pazdro, P.; Karwowski, K.; Czucha, J.; Mizan, M.; Kamonciak, A.; Skibicki, J. Optymalizacja Efektów Hamowania Odzyskowego w Komunikacji Miejskiej Przez Sterowanie Adaptacyjne; State Committee for Scientific Research (KBN) Report: Gdansk, Poland, 2003. (In Polish) [Google Scholar]
- González-Gil, A.; Palacin, R.; Batty, P.; Powell, J. Energy-efficient urban rail systems: Strategies for an optimal management of regenerative braking energy. In Proceedings of the Transport Research Arena 2014, Paris, France, 14–17 April 2014. [Google Scholar]
- Pena-Alcaraz, M.; Fernandez, A.; Cucala Paloma, A.; Ramos, A.; Pecharromán, R. Optimal underground timetable design based on power flow for maximizing the use of regenerative-braking energy. J. Rail Rapid Transit 2011, 226, 397–408. [Google Scholar] [CrossRef]
- Nasri, A.; Fekri Moghadam, M.; Mokhtari, H. Timetable optimization for maximum usage of regenerative energy of braking in electrical railway systems. In Proceedings of the SPEEDAM 2010, Pisa, Italy, 14–16 June 2010. [Google Scholar]
- Yang, X.; Ning, B.; Li, X.; Tang, T. A Two-Objective Timetable Optimization Model in Subway Systems. IEEE Trans. Intell. Transp. Syst. 2014, 5, 1913–1921. [Google Scholar] [CrossRef]
- Zapata-Barrero, R.; Tackoen, X.; van Mirelo, J. Stationary or onboard energy storage systems for energy consumption reduction in a metro network. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2010, 224, 207–225. [Google Scholar] [CrossRef]
- Chymera, M.; Renfrew, A.; Barnes, M. Analizing the potential of energy storage on electrified transit systems. In Proceedings of the World Congress on Railway Research—WCRR 2008, Seoul, Korea, 18–22 May 2008. [Google Scholar]
- Dominguez, M.; Cucala, A.P.; Fernandez, A.; Pecharroman, R.R.; Blanquer, J. Energy efficiency on train control—Design of metro ATO driving and impact of energy accumulation devices. In Proceedings of the World Congress on Railway Research—WCRR 2011, Lille, France, 22–26 May 2011. [Google Scholar]
- Teymourfar, R.; Asaei, B.; Iman-Eini, H.; Nejati fard, R. Stationary super-capacitor energy storage system to save regenerative braking energy in metro line. Energy Convers. Manag. 2012, 56, 206–214. [Google Scholar] [CrossRef]
- Warin, Y.; Lanselle, R.; Thiounn, M. Active substation. In Proceedings of the World Congress on Railway Research—WCRR 2011, Lille, France, 22–26 May 2011. [Google Scholar]
- Garcia-Ortega, M.J.; Ibaiondo, H. Kinetic energy recovery on railway systems with feedback to the grid. In Proceedings of the World Congress on Railway Research—WCRR 2011, Lille, France, 22–26 May 2011. [Google Scholar]
- Cornic, D. Efficient recovery of braking energy through a reversible dc substation. In Proceedings of the Electrical Systems for Aircraft, Railway and Ship Propulsion (ESARS) Conference, Bologna, Italy, 19–21 October 2010. [Google Scholar] [CrossRef]
- Urząd Transportu Kolejowego. Największe Dworce Kolejowe w Polsce; Urząd Transportu Kolejowego: Warszawa, Poland, 2020. (In Polish) [Google Scholar]
- PKP Informatyka & PKP S.A. Your Routeplanner. Available online: http://old.rozklad-pkp.pl/ (accessed on 20 September 2021).
- Google Maps. Available online: https://www.google.com/maps/ (accessed on 20 September 2021).
- PKP Polskie Linie Kolejowe. Instrukcja o Rozkładzie Jazdy Pociągów Ir-11; PKP Polskie Linie Kolejowe: Warszawa, Poland, 2015. (In Polish) [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Warszawa Wschodnia | Gdańsk Główny | Wrocław Główny | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Train No. | Type of train | Arrival time | Departure time | Train No. | Type of train | Arrival time | Departure time | Train No. | Type of train | Arrival time | Departure time |
| 19889 | KM | 00:03:00 | 00:04:00 | 95401 | SKM | 00:03:00 | 00:04:00 | 83172 | IC | 00:53:00 | 01:05:00 |
| 19567 | KM | 00:25:00 | 00:26:00 | 59400 | SKM | 04:22:00 | 04:23:00 | 38172 | IC | 03:00:00 | 03:05:00 |
| 93150 | KM | 00:50:00 | 00:51:00 | 50600 | R | 04:47:00 | 04:48:00 | 60456 | IC | 04:45:00 | 05:25:00 |
| 21636 | KM | 01:09:00 | 01:10:00 | 55401 | R | 05:00:00 | 05:02:00 | 16170 | IC | 04:47:00 | 04:57:00 |
| 38170 | TLK | 02:52:00 | 02:54:00 | 59402 | SKM | 05:02:00 | 05:03:00 | 69300 | KD | 05:00:00 | 05:05:00 |
| 19891 | KM | 03:12:00 | 03:17:00 | 95711 | SKM | 05:02:00 | 05:03:00 | 69751 | KD | 05:06:00 | 05:10:00 |
| 97151 | KM | 03:17:00 | 03:18:00 | 5600 | IC | 05:17:00 | 05:20:00 | 54170 | TLK | 05:20:00 | 05:37:00 |
| 99880 | SKW | 03:34:00 | 03:46:00 | … | … | … | … | … | … | … | … |
| 12711 | KM | 03:56:00 | 04:05:00 | Poznań Główny | Katowice | ||||||
| 97153 | KM | 04:19:00 | 04:20:00 | 45170 | TLK | 01:37:00 | 01:57:00 | 14103 | TLK | 00:01:00 | 00:10:00 |
| 99580 | SKW | 04:21:00 | 04:22:00 | 18170 | TLK | 02:05:00 | 02:25:00 | 36170 | TLK | 01:48:00 | 02:07:00 |
| 19601 | KM | 04:32:00 | 04:36:00 | 81170 | TLK | 02:13:00 | 02:33:00 | 60456 | IC | 01:48:00 | 02:07:00 |
| 93110 | KM | 04:36:00 | 04:37:00 | 54170 | TLK | 02:20:00 | 02:41:00 | 60457 | IC | 02:02:00 | 02:18:00 |
| 99300 | SKW | 04:39:00 | 04:40:00 | 77113 | KW | 05:02:00 | 05:12:00 | 63170 | TLK | 02:02:00 | 02:18:00 |
| 99582 | SKW | 04:45:00 | 04:46:00 | 77384 | KW | 05:14:00 | 05:21:00 | 41102 | TLK | 04:10:00 | 04:15:00 |
| 91850 | KM | 04:47:00 | 04:48:00 | 38172 | IC | 05:20:00 | 05:54:00 | 83172 | IC | 04:16:00 | 04:21:00 |
| … | … | … | … | … | … | … | … | … | … | … | … |
| Type of Train | Commercial Speed | Acceleration of Braking | Duration of Braking | Acceleration | Duration of Accelerating | Service Time Reserve | Passengers Transfer Time |
|---|---|---|---|---|---|---|---|
| vh [km/h] | ar [m/s2] | th [h:min:sek] | ar [m/s2] | tr [h:min:sek] | TB [h:min:sek] | Twp [h:min:sek] | |
| SKM/SKW | 80 | 0.8 | 00:00:29 | 1.6 | 00:00:15 | 00:02:30 | 00:00:30 |
| R/KM/KD/KW/KS | 100 | 0.8 | 00:00:35 | 1.6 | 00:00:18 | 00:02:30 | 00:01:00 |
| TLK | 120 | 0.8 | 00:00:42 | 1.6 | 00:00:22 | 00:02:00 | 00:01:00 |
| IC | 120 | 0.8 | 00:00:42 | 1.6 | 00:00:22 | 00:02:00 | 00:02:00 |
| EIC | 160 | 0.8 | 00:00:56 | 1.6 | 00:00:29 | 00:01:30 | 00:02:00 |
| EIP | 200 | 0.8 | 00:01:10 | 1.6 | 00:00:35 | 00:01:30 | 00:02:00 |
| Weight | No. of Cooperating Trains | Length of Time for Energetic Trains Cooperation | Arrival Delays | Departure Delays | |
|---|---|---|---|---|---|
| w1 | w2 | w3 | w4 | ||
| FC (24) | Set of weight factor #1 | - | 0.6 | 0.3 | 0.1 |
| Set of weight factor #2 | - | 0.6 | 0.2 | 0.2 | |
| Set of weight factor #3 | - | 0.6 | 0.1 | 0.3 | |
| Set of weight factor #4 | 0.2 | 0.4 | 0.3 | 0.1 | |
| Set of weight factor #5 | 0.2 | 0.4 | 0.2 | 0.2 | |
| Set of weight factor #6 | 0.2 | 0.4 | 0.1 | 0.3 | |
| Set of weight factor #7 | 0.4 | 0.2 | 0.3 | 0.1 | |
| Set of weight factor #8 | 0.4 | 0.2 | 0.2 | 0.2 | |
| Set of weight factor #9 | 0.4 | 0.2 | 0.1 | 0.3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Urbaniak, M.; Kardas-Cinal, E. Optimization of Train Energy Cooperation Using Scheduled Service Time Reserve. Energies 2022, 15, 119. https://doi.org/10.3390/en15010119
Urbaniak M, Kardas-Cinal E. Optimization of Train Energy Cooperation Using Scheduled Service Time Reserve. Energies. 2022; 15(1):119. https://doi.org/10.3390/en15010119
Chicago/Turabian StyleUrbaniak, Michał, and Ewa Kardas-Cinal. 2022. "Optimization of Train Energy Cooperation Using Scheduled Service Time Reserve" Energies 15, no. 1: 119. https://doi.org/10.3390/en15010119
APA StyleUrbaniak, M., & Kardas-Cinal, E. (2022). Optimization of Train Energy Cooperation Using Scheduled Service Time Reserve. Energies, 15(1), 119. https://doi.org/10.3390/en15010119