
A Planning Method for Partially Grid-Connected Bus Rapid Transit Systems Operating with In-Motion Charging Batteries



Abstract
1. Introduction
2. BEB Charging Strategies
2.1. Depot Charging
2.2. Opportunity Charging
2.3. In-Motion Changing
2.3.1. Wireless In-Motion Changing
2.3.2. Conductive In-Motion Charging
- Medium Voltage (MV) feeder: It consists of the equipment required to supply energy from the MV network to the traction substations and depot chargers.
- Traction Substation (TS): It consists of a coupling point to an MV feeder, a power transformer, and an AC/DC converter. It could be used to feed a catenary section and to supply energy to depot scheme to charge the battery buses trough an alternative connector. The cost of TS can be assumed as a function of the power capacity in USD/kW. If a design class VI is assumed for this element, according to standard UNE EN 50328:2004 [20], the equipment is be able to withstand an overload of 3 p.u. during 60 s, 1.5 p.u. for 2 h, and 1.0 continually.
- Catenary segment: It includes the set of elements and equipment of the overhead line such as poles, insulators, mechanical supports, and related accessories. Its cost is almost independent of the feeding power, and it is considered only proportional to the length in USD/km.
- Depot Charger: It consists of a power converter for BEB charging with DC current. Its cost is related to the charger power.
- On-board battery: It is the battery installed on-board the buses, and its cost is related to the energy capacity in USD/kWh, and the chemistry, i.e., LFP, NMC, or LTO.
3. Vehicle Technology Effect in BRT Operation
4. IMC Planning Model
- Objective function: it consists of minimizing the total investment costs, and considers the costs associated to overhead line segments, batteries, traction substations and depot chargers:
- Line segment electrification and traction substation constraints: the following equations determine the installation of electrified segments between bus stops and the location of traction substations to feed the required overhead line segments [13]:
- Bus energy constraints: the following equations describe the energy consumption or storage for each bus. The energy demand D for each bus can be determined through measurements, as in this paper, or transport simulations using vehicle dynamic models and route data (e.g., [13]):
- Battery state-of-charge (SoC) constraints: the following equations determine the initial State-of-charge (SoC) and constraint the energy consumption and storage to the minimum and maximum SoC, according to battery’s capacity:
- Depot Charging Power: The following constraint computes the total required power to charge the bus fleet at the end of the operation day to guarantee a high SoC level at the beginning of next day:
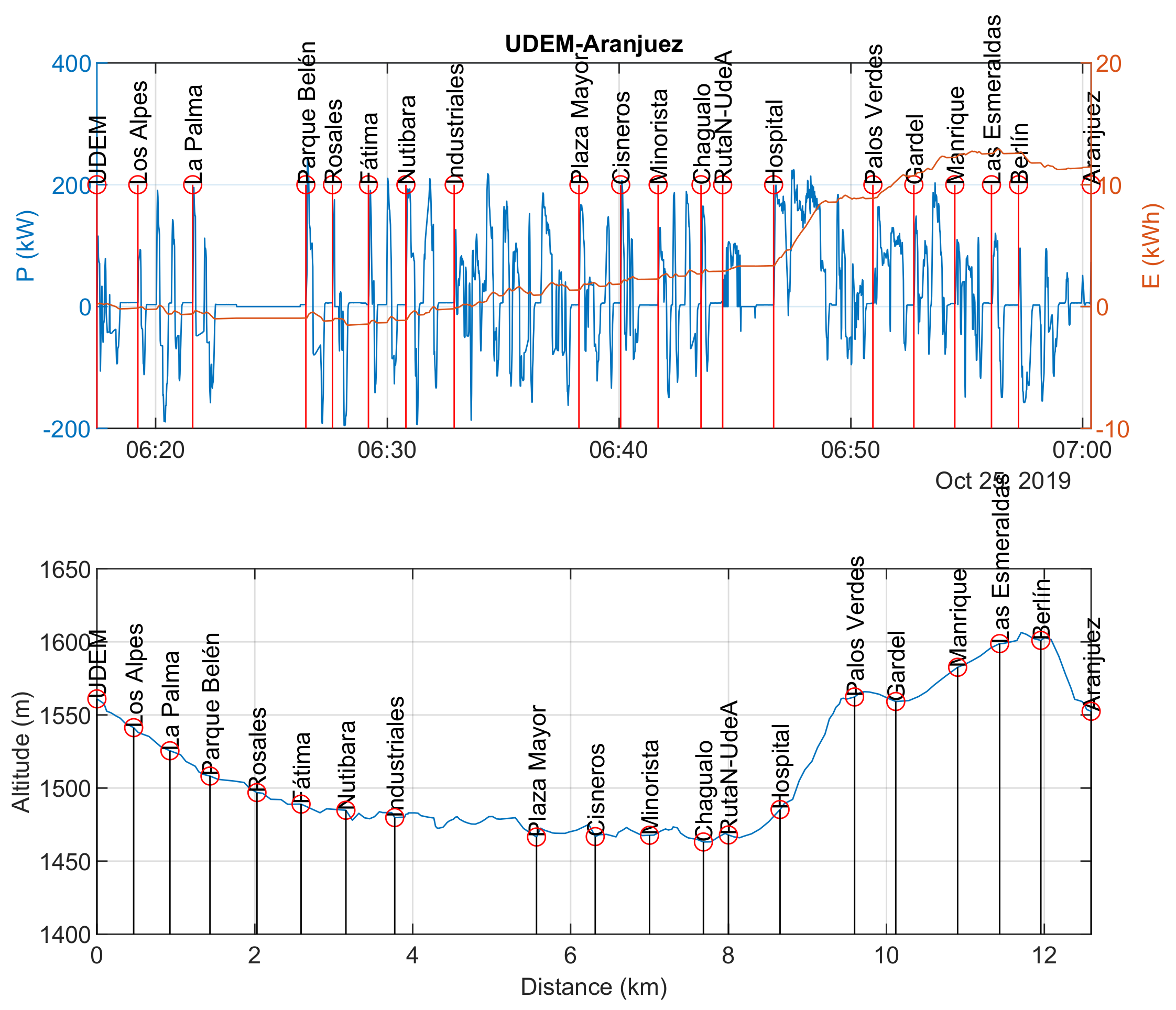
5. Study Case: Medellin’s Metro Bus Line 1
- An average daily range of 240 km is low for most of intensive BRT schemes, being 300 km or higher the most common requirement.
- Average energy consumption of 1.5 kWh/km does not include air conditioning, which is increasingly reclaimed by the public and would be needed more as average temperature increases due to climate change. Additionally, heating is a sensible bus feature in extreme weather countries, and increases the energy consumption of the bus, reducing operational range.
- In many cities as Medellin, where events like pollution emergencies occur, the bus fleet is required to operate at maximum capacity, it becomes difficult to stop a bus for battery charging, and almost all day the operation schedule behaves like peak period.
- Despite many manufacturers define a ratio of buses to chargers of 4, this criteria has proven to be unrealistic when intensive use of the fleet is required.
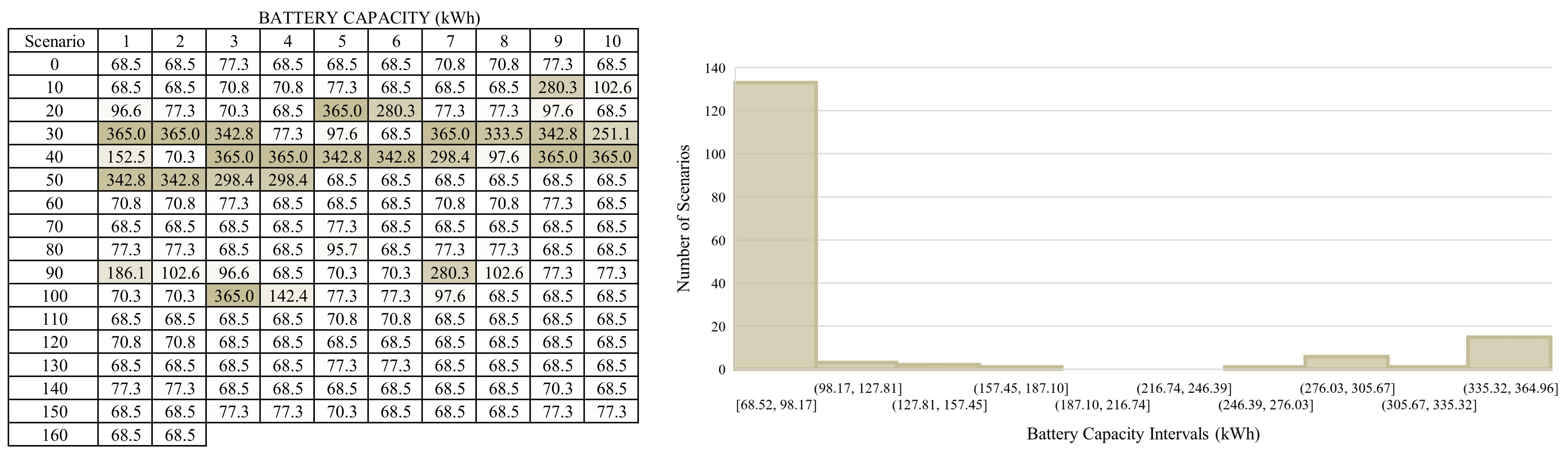
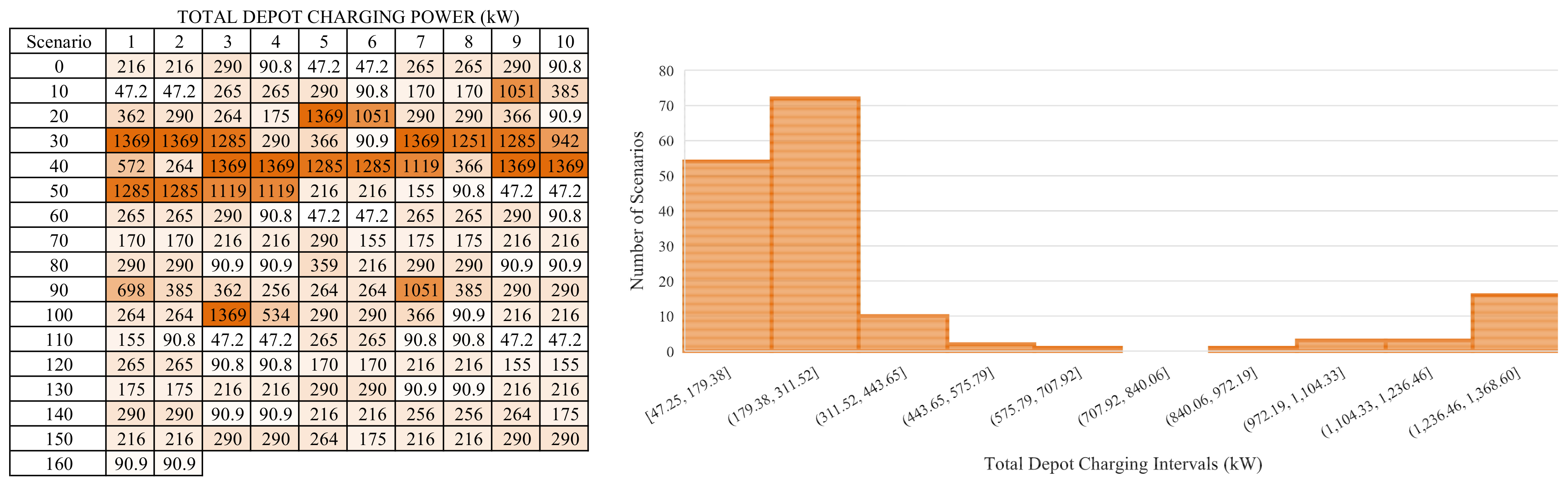
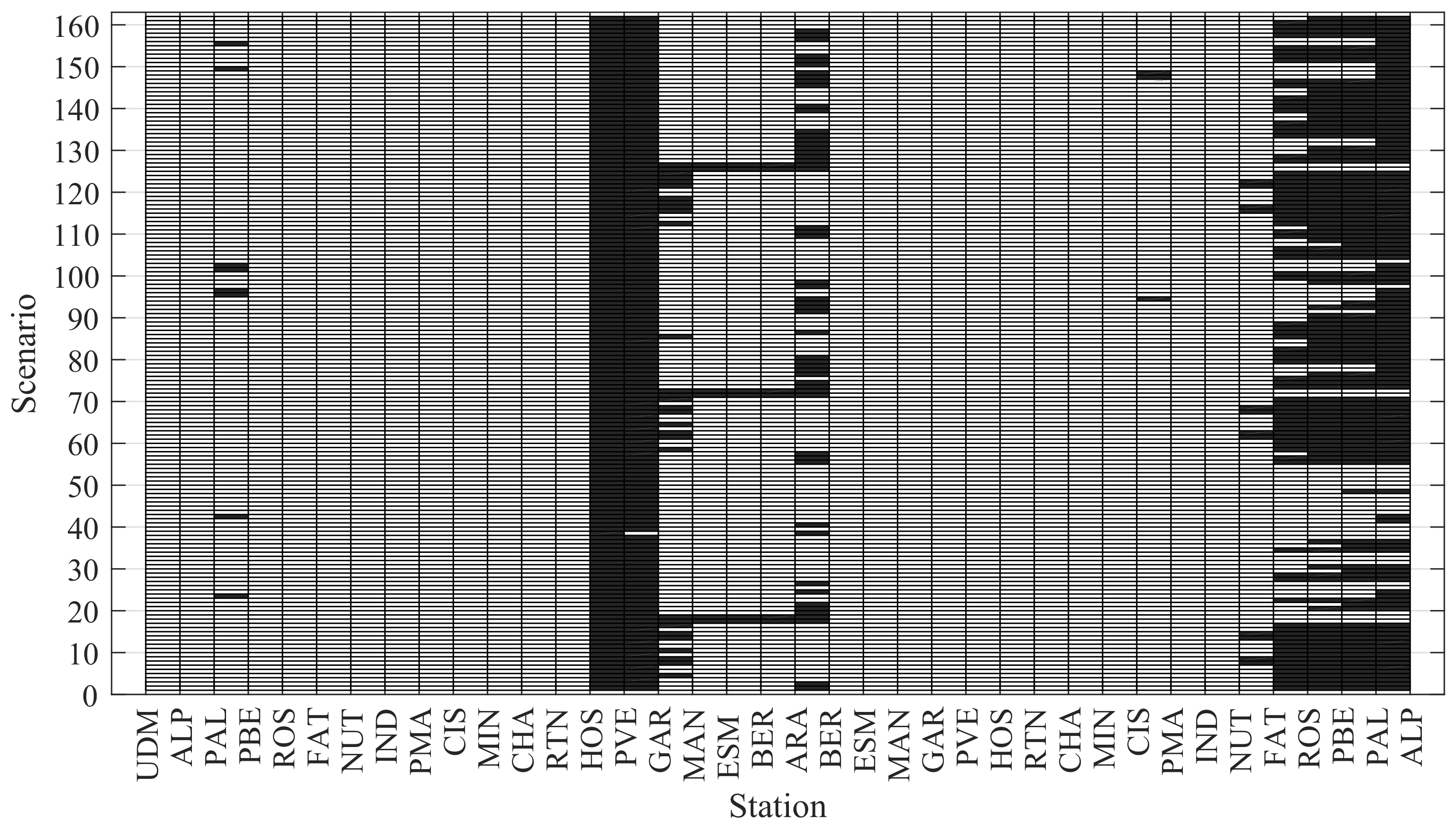
6. Results and Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| b | Bus index |
| l | Trip index |
| s | Station index |
| Total travel time per segment (h) | |
| Depot charging efficiency (p.u.) | |
| Efficiency of in-motion charging (p.u.) | |
| Unitary cost of battery (USD/kWh) | |
| Unitary cost of overhead line (USD/km) | |
| Unitary cost of depot charger (USD/kW) | |
| Unitary cost of feeding substation (USD) | |
| D | Bus energy consumption (kWh) |
| L | Length of route segment between passenger stations (km) |
| NB | Total number of buses |
| NL | Total number of bus trips |
| Ns | Total number of stations |
| In-motion charging power (kW) | |
| Initial battery state-of-charge (p.u.) | |
| Maximum battery state-of-charge (p.u.) | |
| Minimum battery state-of-charge (p.u.) | |
| Depot charging time (h) | |
| Battery capacity of bus b (kWh) | |
| E | Total bus energy (kWh) |
| x | Binary variable for installing overhead line between stations (1 = Install, 0 = Do not install) |
| y | Binary variable for installing traction substation in a passenger station (1 = Install, 0 = Do not install) |
| Acronyms | |
| BEB | Battery Electric Bus |
| BRT | Bus Rapid Transit |
| CNG | Compressed Natural Gas |
| EV | Electric Vehicle |
| GCS | Grid-connected System |
| IEA | International Energy Agency |
| IMC | In-motion Charging |
| LFP | Lithium Ferrophosphate |
| Li-ion | Lithium-ion |
| LTO | Lithium-titanate |
| NMC | Nickel-Managanese-Cobalt |
| MV | Medium Voltage |
| NPV | Net Present Value |
| OC | Opportunity Charging |
| SoC | State-of-charge |
| SoH | State-of-health |
| TS | Traction Substation |
References
- Gilbert, R.; Perl, A. Grid-connected vehicles as the core of future land-based transport systems. Energy Policy 2007, 35, 3053–3060. [Google Scholar] [CrossRef]
- International Energy Agency. The Future of Rail. 2019. Available online: https://www.iea.org/reports/the-future-of-rail (accessed on 15 January 2021).
- International Energy Agency. Global EV Outlook 2019. 2019. Available online: https://www.iea.org/reports/global-ev-outlook-2019 (accessed on 15 January 2021).
- Vilppo, O.; Markkula, J. Feasibility of electric buses in public transport. World Electr. Veh. J. 2015, 7, 357–365. [Google Scholar] [CrossRef]
- Jahic, A.; Eskander, M.; Schulz, D. Charging schedule for load peak minimization on large-scale electric bus depots. Appl. Sci. 2019, 9, 1748. [Google Scholar] [CrossRef]
- Raab, A.F.; Lauth, E.; Strunz, K.; Göhlich, D. Implementation schemes for electric bus fleets at depots with optimized energy procurements in virtual power plant operations. World Electr. Veh. J. 2019, 10, 5. [Google Scholar] [CrossRef]
- Fisher, T.M.; Farley, K.B.; Gao, Y.; Bai, H.; Tse, Z.T.H. Electric vehicle wireless charging technology: A state-of-the-art review of magnetic coupling systems. Wirel. Power Transf. 2014, 1, 87–96. [Google Scholar] [CrossRef]
- Randhahn, A.; Knote, T. Deployment of Charging Infrastructure for Battery Electric Buses. In Towards User-Centric Transport in Europe 2; Springer: Berlin, Germany, 2020; pp. 169–183. [Google Scholar]
- Kahlen, M.T.; Ketter, W.; van Dalen, J. Electric vehicle virtual power plant dilemma: Grid balancing versus customer mobility. Prod. Oper. Manag. 2018, 27, 2054–2070. [Google Scholar] [CrossRef]
- Lajunen, A. Lifecycle costs and charging requirements of electric buses with different charging methods. J. Clean. Prod. 2018, 172, 56–67. [Google Scholar] [CrossRef]
- El-Taweel, N.A.; Farag, H.E.; Mohamed, M. Integrated Utility-Transit Model for Optimal Configuration of Battery Electric Bus Systems. IEEE Syst. J. 2019, 14, 738–748. [Google Scholar] [CrossRef]
- Ruiz, S.; Arroyo, N.; Acosta, A.; Portilla, C.; Espinosa, J. An optimal battery charging and schedule control strategy for electric bus rapid transit. In Proceedings of the MOVICI-MOYCOT 2018: Joint Conference for Urban Mobility in the Smart City, Medellin, Colombia, 18–20 April 2018; pp. 1–5. [Google Scholar]
- Liu, Z.; Song, Z. Robust planning of dynamic wireless charging infrastructure for battery electric buses. Transp. Res. C Emerg. Technol. 2017, 83, 77–103. [Google Scholar] [CrossRef]
- Chen, Z.; Yin, Y.; Song, Z. A cost-competitiveness analysis of charging infrastructure for electric bus operations. Transp. Res. C Emerg. Technol. 2018, 93, 351–366. [Google Scholar] [CrossRef]
- Bartłomiejczyk, M.; Połom, M. Dynamic charging of electric buses as a way to reduce investment risks of urban transport system electrification. In Proceedings of the International Conference TRANSBALTICA, Vilnius, Lithuania, 2–3 May 2019; Springer: Berlin, Germany, 2019; pp. 297–308. [Google Scholar]
- Bartłomiejczyk, M.; Połom, M. The impact of the overhead line’s power supply system spatial differentiation on the energy consumption of trolleybus transport: Planning and economic aspects. Transport 2017, 32, 1–12. [Google Scholar] [CrossRef][Green Version]
- Alfieri, L.; Bracale, A.; Caramia, P.; Iannuzzi, D.; Pagano, M. Optimal battery sizing procedure for hybrid trolley-bus: A real case study. Electr. Power Syst. Res. 2019, 175, 105930. [Google Scholar] [CrossRef]
- Abdelwahed, A.; van den Berg, P.; Brandt, T.; Collins, J.; Ketter, W. Evaluating and Optimizing Opportunity Fast-Charging Schedules in Transit Battery Electric Bus Networks. Transp. Sci. 2020, 54, 1601–1615. [Google Scholar] [CrossRef]
- Göhlich, D.; Fay, T.A.; Jefferies, D.; Lauth, E.; Kunith, A.; Zhang, X. Design of urban electric bus systems. Des. Sci. 2018, 4, e15. [Google Scholar] [CrossRef]
- Asociación Española de Normalización (UNE). Spanish Standard UNE-EN 50328:2004, Railway Applications—Fixed Installations—Electronic Power Converters for Substations; Asociación Española de Normalización: Madrid, Spain, 2007. [Google Scholar]
- Brunton, L. The trolleybus story. IEE Rev. 1992, 38, 57–61. [Google Scholar] [CrossRef]
- Wołek, M.; Wolański, M.; Bartłomiejczyk, M.; Wyszomirski, O.; Grzelec, K.; Hebel, K. Ensuring sustainable development of urban public transport: A case study of the trolleybus system in Gdynia and Sopot (Poland). J. Clean. Prod. 2020, 279, 123807. [Google Scholar] [CrossRef]
- Sun, F.; Liu, B.; Wang, Z. Analysis of energy consumption characteristics of dual-source trolleybus. In Proceedings of the 2014 IEEE Conference and Expo Transportation Electrification Asia-Pacific (ITEC Asia-Pacific), Beijing, China, 31 August–3 September 2014; pp. 1–5. [Google Scholar]
- Bartłomiejczyk, M. Dynamic charging of electrical vehicles. Adv. Mech. Eng. Transp. 2018, 2, 5–10. [Google Scholar]
- Zhang, L.; Yang, Y.; Sun, M.; Liu, H. Energy management strategy based on dynamic programming for dual source trolleybus. Teh. Vjesn. Tech. Gaz. 2017, 24, 1439–1447. [Google Scholar]
- López, R. El Corredor de Trolebuses de Quito. Carreteras, Revista Técnica de la Asociación Española de Carreteras 2003, 133, 99–115. [Google Scholar]
- Wright, L. 15 Bus rapid transit: A review of recent advances. In Urban Transport in the Developing World: A Handbook of Policy and Practice; Edward Elgar Publishing: Cheltenham, UK, 2011; p. 421. [Google Scholar]
- González, E.G.M.; Romana, M.G.; Álvaro, Ó.M. Effectiveness of reserved bus lanes in Arterials. In Proceedings of the Transportation Research Board 92nd Annual Meeting, Washington, DC, USA, 13–17 January 2013; pp. 1–15. [Google Scholar]
- Nair, P.; Kumar, D. Transformation in road transport system in Bogotá: An overview. ICFAI J. Infrastruct. 2005, 3, 20–28. [Google Scholar]
- Połom, M. Trends in the development of trolleybus transport in Poland at the end of the second decade of the 21st century. Prace Komisji Geogr. Komun. PTG 2018, 4, 44–59. [Google Scholar] [CrossRef]
- Transmilenio, S.A. Informe de Gestión 2019. 2019. Available online: https://www.transmilenio.gov.co/publicaciones/151691/informe-de-gestion-2019/ (accessed on 22 January 2021).
- Autoridad Nacional de Licencias Ambientales (ANLA). Certificación 629. 2016. Available online: http://portal.anla.gov.co/sites/default/files/res_cert_0629_10062016.pdf (accessed on 22 January 2021).
- Diez, A.E.; Bohórquez, A.; Velandia, E.; Roa, L.F.; Restrepo, M. Modern trolleybuses on bus rapid transit: Key for electrification of public transportation. In Proceedings of the 2010 IEEE ANDESCON, Bogota, Colombia, 15–17 September 2010; pp. 1–7. [Google Scholar]
- Castillo-Camacho, M.P.; Tunarrosa-Grisales, I.C.; Chacón-Rivera, L.M.; Guevara-Luna, M.A.; Belalcázar-Cerón, L.C. Personal Exposure to PM2.5 in the Massive Transport System of Bogotá and Medellín, Colombia. Asian J. Atmos. Environ. 2020, 14, 210–224. [Google Scholar] [CrossRef]
- Guevara-Luna, F.A.; Guevara-Luna, M.A.; Belalcázar-Cerón, L.C. Passengers Exposure to PM2.5 in Self-polluted BRT-Diesel Operated Transport System Microenvironments. Asian J. Atmos. Environ. 2020, 14, 105–118. [Google Scholar] [CrossRef]
- Ríos, A.M.G.; Salas, M.A.D.; Becerra, L.C.B. Evaluación diaria de la exposición personal a PM2.5 en cuatro localidades de la ciudad de Bogotá. In Proceedins of the Congreso Colombiano y Conferencia Internacional de Calidad del Aire y Salud Pública, Barranquilla, Colombia, 14–16 August 2019. [Google Scholar]
- Betancur, D.; Duarte, L.F.; Revollo, J.; Restrepo, C.; Díez, A.E.; Isaac, I.A.; López, G.J.; González, J.W. Methodology to Evaluate the Impact of Electric Vehicles on Electrical Networks Using Monte Carlo. Energies 2021, 14, 1300. [Google Scholar] [CrossRef]
- Gómez Hernández, L.Y.; Semeshenko, V. Transporte y calidad de vida urbana: Estudio de caso sobre el Metroplús de Medellín, Colombia. Lect. Econ. 2018, 89, 103–131. [Google Scholar] [CrossRef]
- Hart, W.E.; Laird, C.D.; Watson, J.P.; Woodruff, D.L.; Hackebeil, G.A.; Nicholson, B.L.; Siirola, J.D. Pyomo–Optimization Modeling in Python, 2nd ed.; Springer: Berlin, Germany, 2017; Volume 67. [Google Scholar]
- Cplex, I.I. V12.1: User’s Manual for CPLEX. Int. Bus. Mach. Corp. 2009, 46, 157. [Google Scholar]
- Czyzyk, J.; Mesnier, M.P.; Moré, J.J. The NEOS Server. IEEE J. Comput. Sci. Eng. 1998, 5, 68. [Google Scholar] [CrossRef]
- Dolan, E.D. The NEOS Server 4.0 Administrative Guide; Technical Memorandum ANL/MCS-TM-250; Mathematics and Computer Science Division, Argonne National Laboratory: Lemont, IL, USA, 2001. [Google Scholar]
- Gropp, W.; Moré, J.J. Optimization Environments and the NEOS Server. In Approximation Theory and Optimization; Buhman, M.D., Iserles, A., Eds.; Cambridge University Press: Cambridge, UK, 1997; p. 167. [Google Scholar]
- Salzillo-Arriaga, D.; Sessing, G.; Kowalski, J. Strengths, Weaknesses, Opportunities and Threats of Electrification Strategies. 2018. Available online: https://ec.europa.eu/research/participants/documents/downloadPublic?documentIds=080166e5bb778c92&appId=PPGMS (accessed on 7 February 2021).
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bus Technology | Energy Consumption (kWh/km) | GHG Emissions (kgCO2/km) | Energy Cost (USD/km) | Comments |
|---|---|---|---|---|
| Diesel | 6.56 | 1.70 | 0.402 | From average diesel consumption in Transmilenio BRT (6.20 km/gL), Bogotá. Emissions from tailpipe [31] |
| CNG | 8.75 | 1.76 | 0.370 | From average CNG consumption in Metroplus BRT, Medellín (1.2 km/m3). Emissions from tailpipe [32]. |
| BEB | 1.34 | 0.28 | 0.191 | From average consumption in Metroplus BRT, Medellín. Emissions from electric grid [32]. |
| Bus Parameter | Value | Comments |
|---|---|---|
| Length (m) | 18 | Articulated bus |
| Width (m) | 2.55 | |
| Heigth (m) | 3.26 | |
| Seats | 33 | |
| Passengers | 160 | |
| Empty weight (kg) | 19,120 | Measured 19,770 kg |
| Maximum weigth (kg) | 30,000 | |
| Battery capacity (kWh) | 450 | |
| Power (KW) | 360 | 2 × 180 kW Permanent magnet synchronous motor |
| Battery Chemistry | LFP |
| Battery and Charger Information | Value | Comments |
|---|---|---|
| Number of parallel modules | 2 | |
| Voltage per module (V) | 736 | |
| Current capacity per module (Ah) | 300 | |
| Module energy capacity (kWh) | 220.8 | |
| Battery energy capacity (kWh) | 441.6 | 450 kWh according to manufacturer |
| Cells per module | 230 | |
| Nominal cell voltage (V) | 3.2 | |
| Charging power (kW) | 200 | 2 × 100 kW plugs, 480 Vac |
| Measured charging power (kW) | 154.32 kW | |
| Measured charging time (h) | 2.58 | From 10% SoC |
 |
| Parameter | Value |
|---|---|
| Number of buses (NB) | 30 |
| Number of station (NS) | 39 |
| Number of bus trips (NL) | 11 |
| Minimum SoC () | 0.3 |
| Maximum SoC () | 0.9 |
| Initial SoC () | 0.8 |
| IMC efficiency () | 1 |
| Depot charging efficiency () | 1 |
| Depot charging time () | 4 h |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Díez, A.E.; Restrepo, M. A Planning Method for Partially Grid-Connected Bus Rapid Transit Systems Operating with In-Motion Charging Batteries. Energies 2021, 14, 2550. https://doi.org/10.3390/en14092550
Díez AE, Restrepo M. A Planning Method for Partially Grid-Connected Bus Rapid Transit Systems Operating with In-Motion Charging Batteries. Energies. 2021; 14(9):2550. https://doi.org/10.3390/en14092550
Chicago/Turabian StyleDíez, Andrés E., and Mauricio Restrepo. 2021. "A Planning Method for Partially Grid-Connected Bus Rapid Transit Systems Operating with In-Motion Charging Batteries" Energies 14, no. 9: 2550. https://doi.org/10.3390/en14092550
APA StyleDíez, A. E., & Restrepo, M. (2021). A Planning Method for Partially Grid-Connected Bus Rapid Transit Systems Operating with In-Motion Charging Batteries. Energies, 14(9), 2550. https://doi.org/10.3390/en14092550