
New Methodology for Computing the Aircraft’s Position Based on the PPP Method in GPS and GLONASS Systems



Abstract
1. Introduction
2. Related Papers
3. Research Method
3.1. Positioning Model of the PPP Method for GPS and GLONASS Solutions
- -
- for GPS or GLONASS:
3.2. New Mathematical Scheme for Improving the GPS and GLONASS Solution in the PPP Method
- -
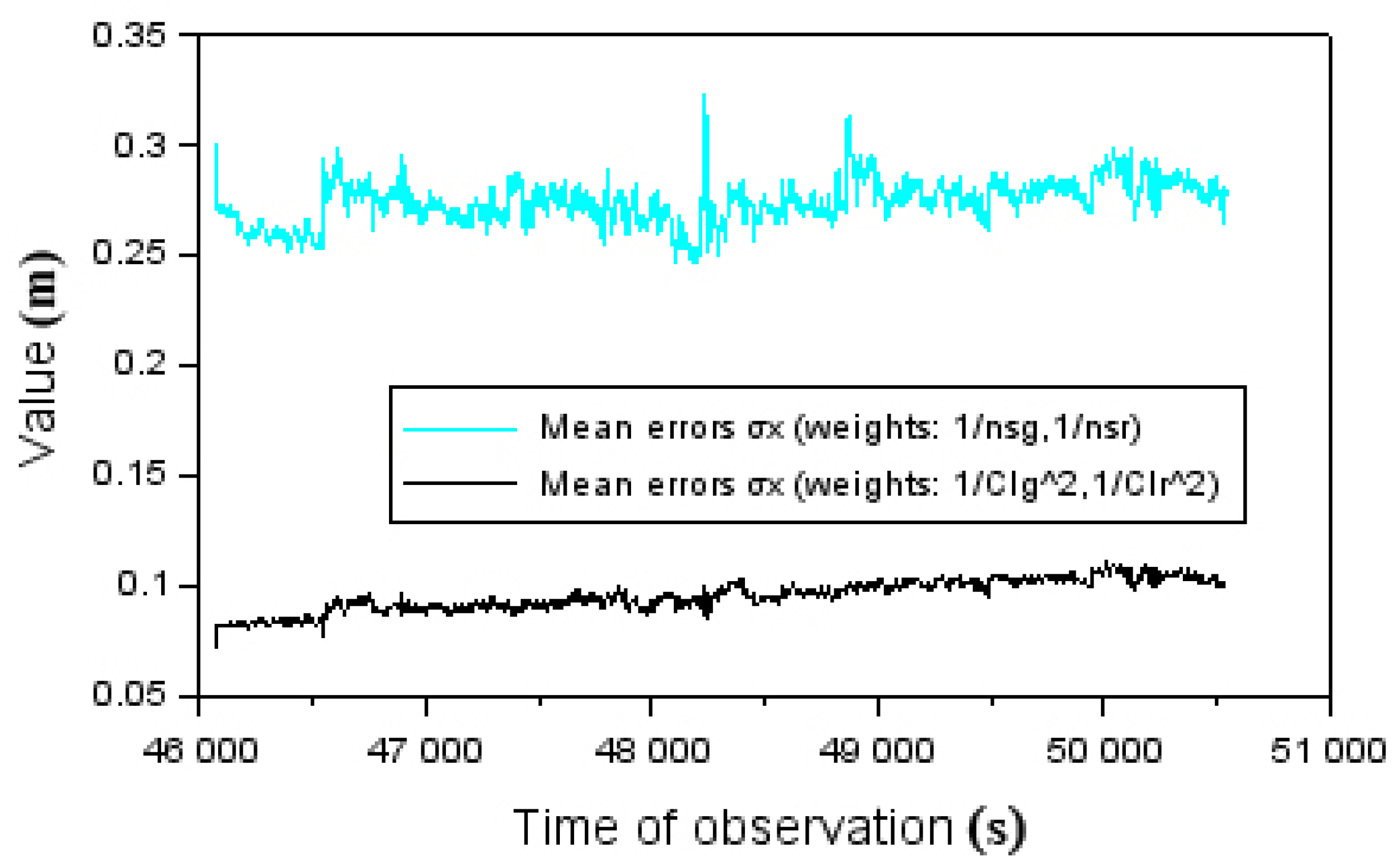
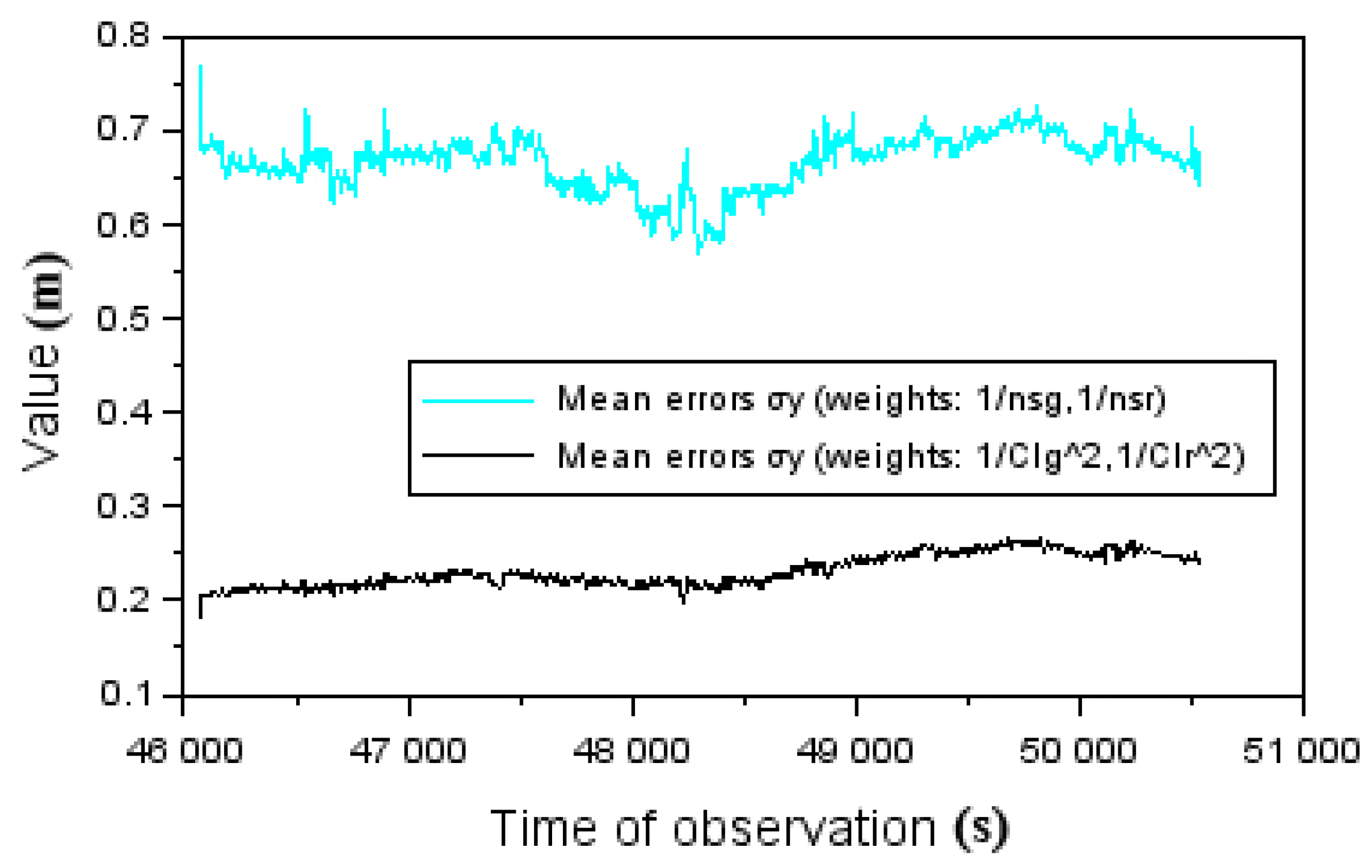
- determination of the average measurement error,
- -
- determining the corrections,
- -
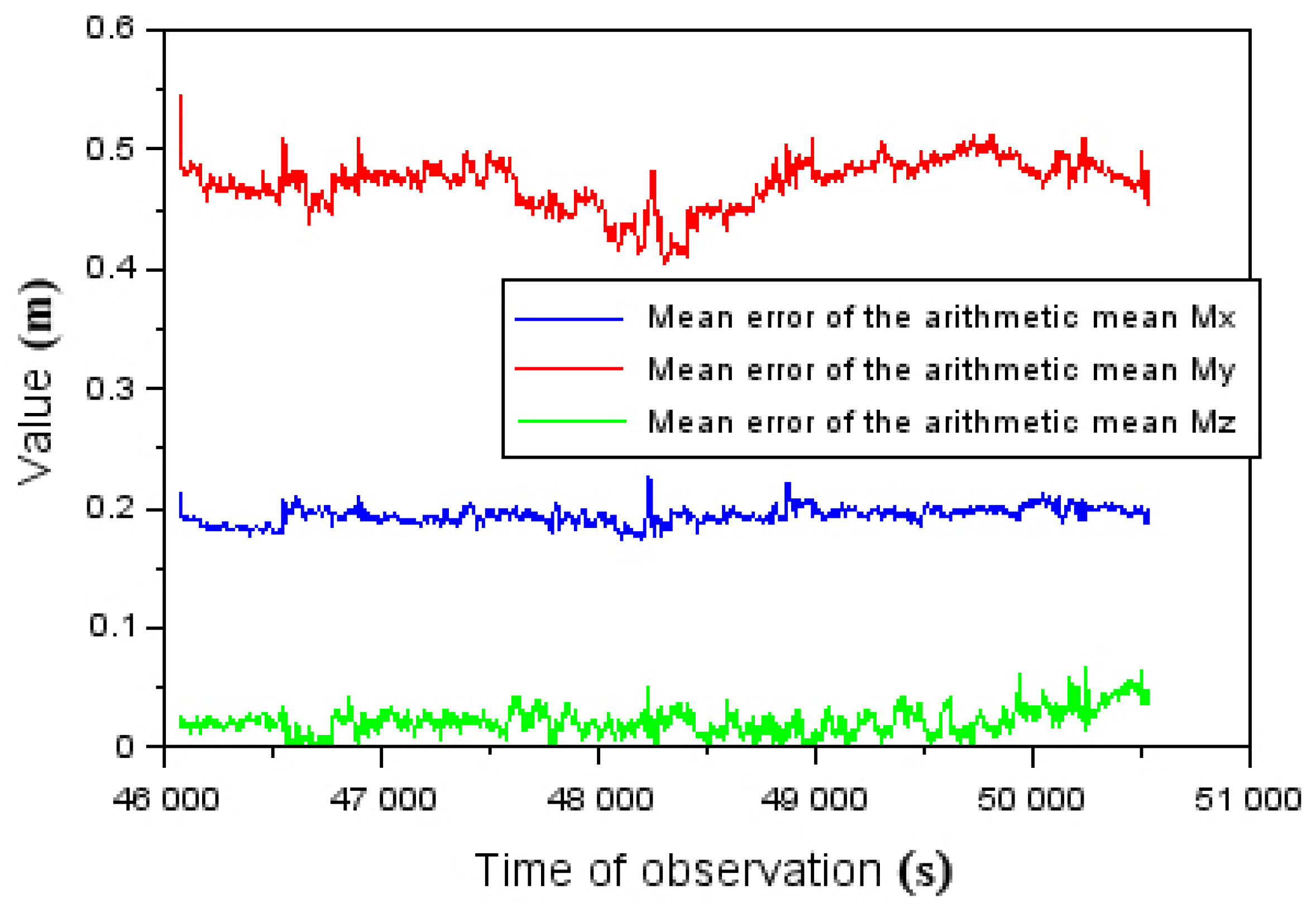
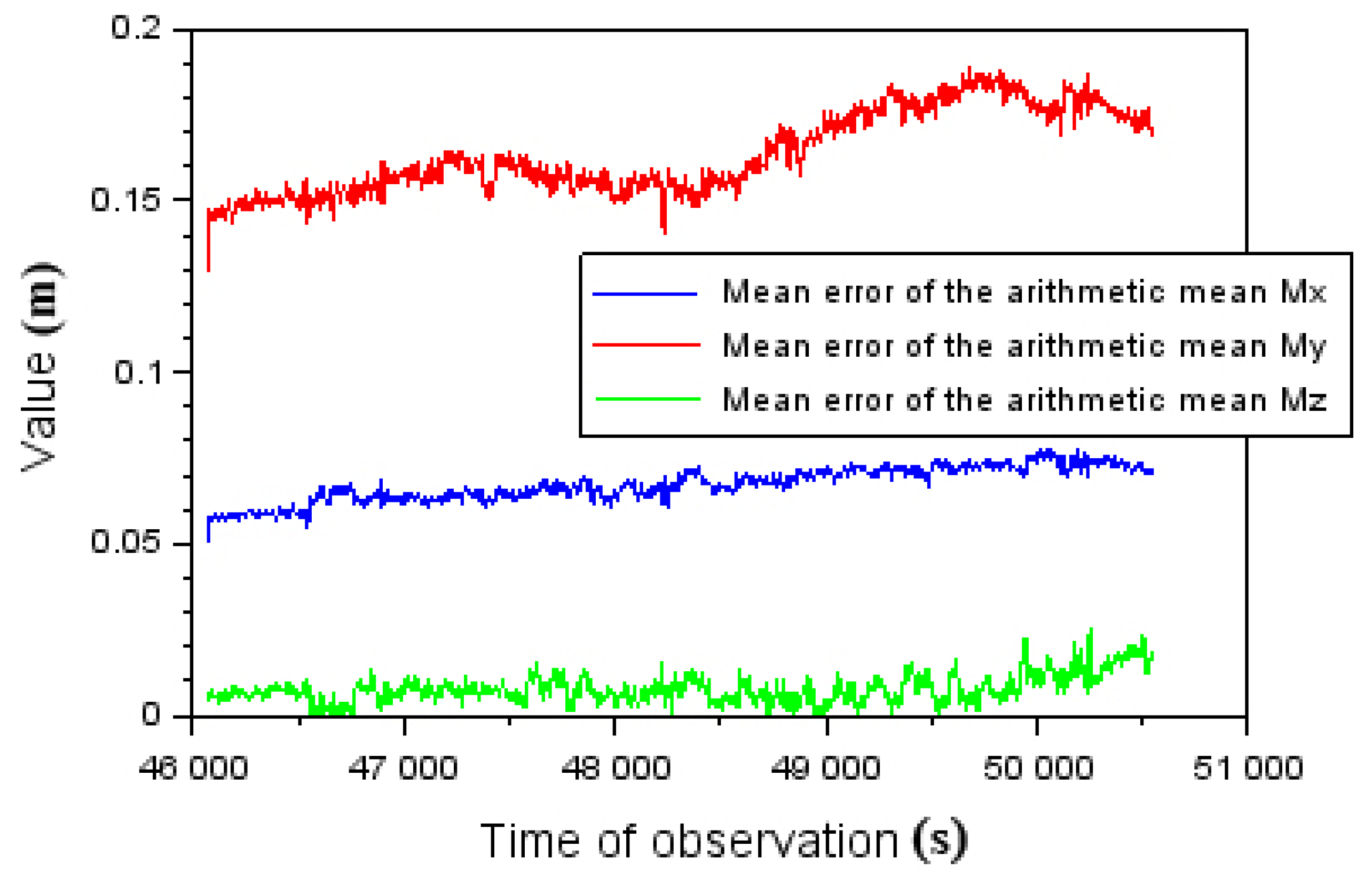
- determination of the mean error of the arithmetic mean.
4. Research Test
- -
- the coordinates of the aircraft are modeled from white noise,
- -
- the receiver clock offset is modeled from white noise,
- -
- the phase ambiguity for each satellite is modeled as a constant value;
- -
- the ZWD is modeled as a random walk parameter.
5. Results
6. Discussion
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- International Civil Aviation Organization. ICAO Standards and Recommended Practices (SARPS), Annex 10, Volume 1 (Radio Navigation Aids). 2006. Available online: https://www.ulc.gov.pl/pl/prawo/prawomi%C4%99dzynarodowe/206-konwencje (accessed on 15 January 2021).
- Krasuski, K. Application the GPS Code Observations in BSSD Method for Recovery the Position of the Aircraft. J. Autom. Mob. Robot. Intell. Syst 2017, 11, 45–52. [Google Scholar] [CrossRef]
- Krasuski, K. Utilization CSRS-PPP software for recovery aircraft’s position. Sci. J. Sil. Univ. Technol. Ser. Transp. 2015, 89, 61–68. [Google Scholar] [CrossRef]
- Grzegorzewski, M.; Jaruszewski, W.; Fellner, A.; Oszczak, S.; Wasilewski, A.; Rzepecka, Z.; Kapcia, J.; Poplawski, T. Preliminary results of DGPS/DGLONASS aircraft positioning in flight approaches and landings. Annu. Navig. 1999, 1, 41–53. [Google Scholar]
- Grzegorzewski, M. Navigating an aircraft by means of a position potential in three dimensional space. Annu. Navig. 2005, 9, 111. [Google Scholar]
- El-Mowafy, A. Precise Point Positioning in the airborne mode. Artif. Satell. 2011, 46, 33–45. [Google Scholar] [CrossRef]
- Abdel-tawwab Abdel-salam, M. Precise Point Positioning Using Undifferenced Code and Carrier Phase Observations. Ph.D. Thesis, University of Calgary, Calgary, AB, Canada, September 2005. [Google Scholar]
- Gao, Y.; Chen, K. Performance Analysis of Precise Point Positioning using real-time orbit and clock products. J. Glob. Position. Syst. 2004, 3, 95–100. [Google Scholar] [CrossRef]
- Gao, Y.; Wojciechowski, A. High precision kinematic positioning using single dual frequency GPS receiver. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2004, 34, 845–850. [Google Scholar]
- Shimizu, Y.; Murata, M. Flight Evaluation of GPS Precise Point Positioning Software for Helicopter Navigation. SICE J. Control Meas. Syst. Integr. 2008, 1, 362–367. [Google Scholar] [CrossRef]
- Gross, J.N.; Watson, R.M.; D’Urso, S.; Gu, Y. Flight-Test Evaluation of Kinematic Precise Point Positioning of Small UAVs. Int. J. Aerosp. Eng. 2016, 1259893. [Google Scholar] [CrossRef]
- Hutton, J.J.; Gopaul, N.; Zhang, X.; Wang, J.; Menon, V.; Rieck, D.; Kipka, A.; Pastor, F. Centimeter-Level Robust Gnss-Aided Inertial Post-Processing for Mobile Mapping Without Local Reference Stations. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XXIII ISPRS Congress, Prague, Czech Republic, 12–19 July 2016; Volume XLI-B3, pp. 819–826. [Google Scholar] [CrossRef]
- Zhang, X. Precise Point Positioning: Evaluation and Airborne Lidar Calibration; Danish National Space Center: Copenhagen, Denmark, 2006.
- Waypoint Products Group. Airborne Precise Point Positioning (PPP) in GrafNav 7.80 with Comparisons to Canadian Spatial Reference System (CSRS) Solutions; NovAtel Inc.: Calgary, AB, Canada, 2006; 8p. [Google Scholar]
- Chen, K.; Gao, Y. Real-Time Precise Point Positioning Using Single Frequency Data. In Proceedings of the 18th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2005), Long Beach, CA, USA, 13–16 September 2005; pp. 1514–1523. [Google Scholar]
- Le, A.Q.; Tiberius, C. Single-frequency precise point positioning with optimal filtering. GPS Solut. 2007, 11, 61–69. [Google Scholar] [CrossRef]
- Grayson, B.; Penna, N.T.; Mills, J.P.; Grant, D.S. GPS precise point positioning for UAV photogrammetry. Photogramm. Rec. 2018, 33, 427–447. [Google Scholar] [CrossRef]
- Yuan, X.; Fu, J.; Sun, H.; Toth, C. The application of GPS precise point positioning technology in aerial triangulation. ISPRS J. Photogramm. Remote Sens. 2009, 64, 541–550. [Google Scholar] [CrossRef]
- Gao, Z.; Zhang, H.; Ge, M.; Niu, X.; Shen, W.; Wickert, J.; Schuh, H. Tightly coupled integration of ionosphere-constrained precise point positioning and inertial navigation systems. Sensors 2015, 15, 5783–5802. [Google Scholar] [CrossRef]
- Gao, Z.; Shen, W.; Zhang, H.; Niu, X.; Ge, M. Real-time Kinematic Positioning of INS Tightly Aided Multi-GNSS Ionospheric Constrained PPP. Sci. Rep. 2016, 6, 30488. [Google Scholar] [CrossRef]
- Kjørsvik, N.S.; Gjevestad, J.G.O.; Brøste, E.; Gade, K.; Hagen, O.-K. Tightly coupled precise point positioning and inertial navigation systems. In Proceedings of the International Calibration and Orientation Workshop EuroCOW 2010, Castelldefels, Spain, 10–12 February 2010; 6p. [Google Scholar]
- Roesler, G.; Martell, H. Tightly coupled processing of Precise Point Position (PPP) and INS data. In Proceedings of the 22nd International Meeting of the Satellite Division of the Institute of Navigation, Savannah, GA, USA, 22–25 September 2009; pp. 1898–1905. [Google Scholar]
- Shi, J.; Yuan, X.; Cai, Y.; Wang, G. GPS real-time precise point positioning for aerial triangulation. GPS Solut. 2017, 21, 405–414. [Google Scholar] [CrossRef]
- Krasuski, K.; Wierzbicki, D.; Jafernik, H. Utilization PPP method in aircraft positioning in post-processing mode. Aircr. Eng. Aerosp. Tech. 2018, 90, 202–209. [Google Scholar] [CrossRef]
- Grzegorzewski, M.; Ciećko, A.; Oszczak, S.; Popielarczyk, D. Autonomous and EGNOS Positioning Accuracy Determination of Cessna Aircraft on the Edge of EGNOS Coverage. In Proceedings of the 2008 National Technical Meeting of The Institute of Navigation, San Diego, CA, USA, 28–30 January 2008; pp. 407–410. [Google Scholar]
- Ćwiklak, J.; Kozuba, J.; Krasuski, K.; Jafernik, H. The assessment of aircraft positioning accuracy using GPS data in RTK-OTF technique. In Proceedings of the 18th International Multidisciplinary Scientific GeoConference SGEM 2018, Sofia, Bulgaria, 2–8 July 2018; pp. 459–466, ISBN 978-619-7408-40-9. [Google Scholar] [CrossRef]
- Krasuski, K.; Kobialka, E.; Grzegorzewski, M. Research of Accuracy of the Aircraft Position Using the GPS and EGNOS Systems in Air Transport. Commun. Sci. Lett. Univ. Zilina 2019, 21, 27–34. [Google Scholar] [CrossRef]
- Ćwiklak, J.; Kozuba, J.; Krasuski, K.; Jafernik, H. Determination of the aircraft position in PPP method in an in-flight test—Case study. In Proceedings of the 18th International Multidisciplinary Scientific GeoConference SGEM 2018, Sofia, Bulgaria, 2–8 July 2018; pp. 133–140, ISBN 978-619-7408-40-9. [Google Scholar] [CrossRef]
- Kozuba, J.; Krasuski, K. Utilization of the PPP method for precise positioning of the aircraft in air navigation. In Proceedings of the 22nd International Scientific Conference Transport Means 2018, Trakai, Lithuania, 3–5 October 2018; pp. 16–21, ISSN 1822-296 X. [Google Scholar]
- Krasuski, K. Aircraft positioning using SPP method in GPS system. Aircr. Eng. Aerosp. Tech. 2018, 90, 1213–1220. [Google Scholar] [CrossRef]
- Krasuski, K. Application the Single Difference Technique in Aircraft Positioning Using the GLONASS System in the Air Transport. Commun. Sci. Lett. Univ. Zilina 2019, 21, 51–58. [Google Scholar] [CrossRef]
- Krasuski, K.; Jafernik, H. Applied GLONASS observations in PPP method in airborne test in Mielec. Inform. Autom. Pomiary Gospod. Ochr. Śr. 2016, 6, 83–88. [Google Scholar] [CrossRef]
- Jafernik, H.; Krasuski, K.; Cwiklak, J. Application the PPP Method in aircraft positioning in air navigation. Revist. Eur. Derecho Navega. Marít. Aeronáut. 2017, 34, 1–10. [Google Scholar]
- Krasuski, K.; Cwiklak, J.; Jafernik, H. Aircraft positioning using PPP method in GLONASS system. Aircr. Eng. Aerosp. Tech. 2018, 90, 1413–1420. [Google Scholar] [CrossRef]
- Krasuski, K.; Ciećko, A.; Bakuła, M.; Wierzbicki, D. New Strategy for Improving the Accuracy of Aircraft Positioning Based on GPS SPP Solution. Sensors 2020, 20, 4921. [Google Scholar] [CrossRef] [PubMed]
- Monico, J.F.G.; Marques, H.A.; Tsuchya, I.; Oyama, R.T.; Queiroz, W.R.S.; Souza, M.C.; Wentz, J.P. Real Time PPP Applied to Airplane Fligtht Tests. Bull. Geod. Sci. 2019, 25, e2019007. [Google Scholar] [CrossRef]
- Navipedia Website. Available online: https://gssc.esa.int/navipedia/index.php/Receiver_Antenna_Phase_Centre (accessed on 30 October 2020).
- Hadaś, T. GNSS-WARP software for real-time Precise Point Positioning. Artif. Satell. 2015, 50, 59–76. [Google Scholar] [CrossRef]
- Leandro, R.; Santos, M.; Langley, R. Analyzing GNSS data in precise point positioning software. GPS Solut. 2011, 15, 1–13. [Google Scholar] [CrossRef]
- Krasuski, K. The impact of IGS precise products in aircraft positioning in air navigation. Pomiary Autom. Robot. 2018, 2, 61–66. [Google Scholar] [CrossRef]
- Osada, E. Geodesy; Oficyna Wydawnicza Politechniki Wrocławskiej: Wroclaw, Poland, 2001; ISBN 83-7085-663-2. [Google Scholar]
- CSRS-PPP Tools Website. Available online: https://webapp.geod.nrcan.gc.ca/geod/tools-outils/ppp.php (accessed on 30 October 2020).
- Scilab Website. Available online: https://www.scilab.org/ (accessed on 30 October 2020).
- CODE LAC Website. Available online: http://ftp.aiub.unibe.ch/CODE/ (accessed on 30 October 2020).
- Takasu, T. RTKLIB ver. 2.4.2 Manual, RTKLIB: An Open Source Program. Package for GNSS Positioning. 2013. Available online: http://www.rtklib.com/prog/manual_2.4.2.pdf (accessed on 30 October 2020).
- Abdel-Maguid, R.H. Assessment and Testing of GPS kinematic Surveys using Precise Point Positioning Technique. J. Eng. Comput. Sci. 2016, 8, 81–94. [Google Scholar]
- Specht, M. Consistency of the Empirical Distributions of Navigation Positioning System Errors with Theoretical Distributions—Comparative Analysis of the DGPS and EGNOS Systems in the Years 2006 and 2014. Sensors 2021, 21, 31. [Google Scholar] [CrossRef] [PubMed]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Coordinate | Measurement Weight | ||
|---|---|---|---|
| X | 0.323 | 3.841 | |
| Y | 0.769 | 3.841 | |
| Z | 0.089 | 3.841 | |
| X | 0.110 | 3.841 | |
| Y | 0.267 | 3.841 | |
| Z | 0.029 | 3.841 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Krasuski, K.; Wierzbicki, D. New Methodology for Computing the Aircraft’s Position Based on the PPP Method in GPS and GLONASS Systems. Energies 2021, 14, 2525. https://doi.org/10.3390/en14092525
Krasuski K, Wierzbicki D. New Methodology for Computing the Aircraft’s Position Based on the PPP Method in GPS and GLONASS Systems. Energies. 2021; 14(9):2525. https://doi.org/10.3390/en14092525
Chicago/Turabian StyleKrasuski, Kamil, and Damian Wierzbicki. 2021. "New Methodology for Computing the Aircraft’s Position Based on the PPP Method in GPS and GLONASS Systems" Energies 14, no. 9: 2525. https://doi.org/10.3390/en14092525
APA StyleKrasuski, K., & Wierzbicki, D. (2021). New Methodology for Computing the Aircraft’s Position Based on the PPP Method in GPS and GLONASS Systems. Energies, 14(9), 2525. https://doi.org/10.3390/en14092525