
Vibration Monitoring for Position Sensor Fault Diagnosis in Brushless DC Motor Drives

 , ,
, , 

Abstract
1. Introduction
2. System Overview
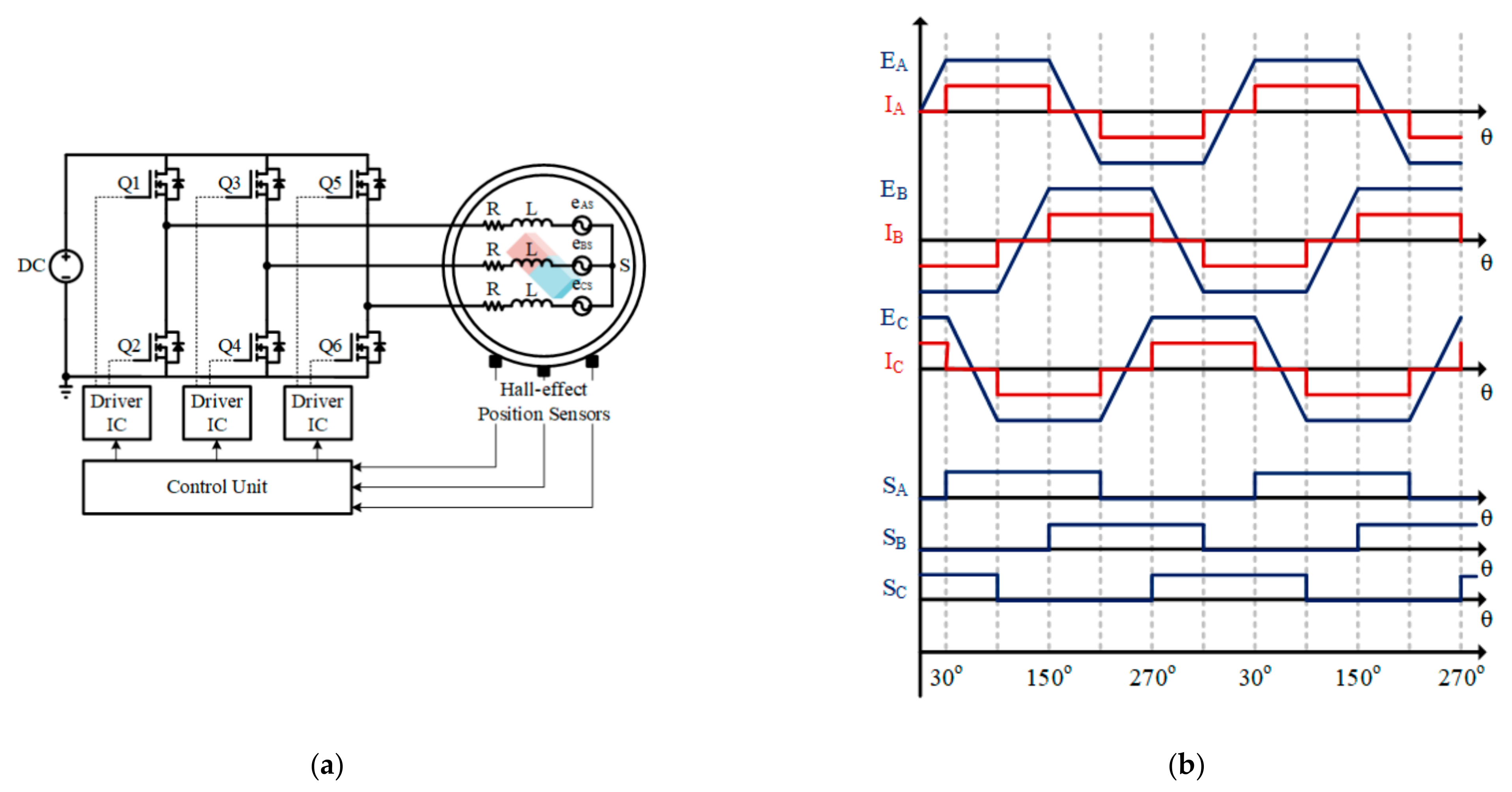
2.1. Brushless DC Motor Drive Operating Principles
2.2. Use of Piezoelectric Transducers for Position Sensor Faults Detection
2.3. Harmonic Analysis Using the Goertzel Algorithm
3. Investigation of Position Sensor Fault Impact on a BLDC Motor Drive through Simulation
3.1. Simulation Model Development and Healthy System Operation
3.2. Brushless DC Motor Drive under Position Sensor Misalignment Fault
3.3. Brushless DC Motor Drive under Position Sensor Breakdown Fault
3.3.1. Simulation Analysis of Single Position Sensor Breakdown Fault
3.3.2. Simulation Analysis of Double Position Sensor Breakdown Fault
4. Experimental Investigation of the Proposed Fault-Detection Methodology
4.1. Development of the Experimental Setup
4.2. Piezoelectric Sensor Investigation under Position Sensor Misalignment Defect
4.3. Piezoelectric Sensor Investigation under a Single Position Sensor Breakdown Fault
4.4. Piezoelectric Sensor Investigation under a Double Position Sensor Breakdown Fault
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Nandi, S.; Toliyat, H.A.; Li, X. Condition Monitoring and Fault Diagnosis of Electrical Motors—A Review. IEEE Trans. Energy Convers. 2005, 20, 719–729. [Google Scholar] [CrossRef]
- Dyer, D.; Stewart, R.M. Detection of Rolling Element Bearing Damage by Statistical Vibration Analysis. J. Mech. Des. 1978, 100, 229–235. [Google Scholar] [CrossRef]
- Henriquez, P.; Alonso, J.B.; Ferrer, M.A.; Travieso, C.M. Review of Automatic Fault Diagnosis Systems Using Audio and Vibration Signals. IEEE Trans. Syst. Man Cybern. Syst. 2014, 44, 642–652. [Google Scholar] [CrossRef]
- Kanović, Ž.; Matić, D.; Jeličić, Z.; Rapaić, M.; Jakovljević, B.; Kapetina, M. Induction Motor Broken Rotor Bar Detection Using Vibration Analysis—A Case Study. In Proceedings of the 2013 9th IEEE International Symposium on Diagnostics for Electric Machines, Power Electronics and Drives (SDEMPED), Valencia, Spain, 27–30 August 2013; pp. 64–68. [Google Scholar] [CrossRef]
- Zimnickas, T.; Vanagas, J.; Dambrauskas, K.; Kalvaitis, A. A Technique for Frequency Converter-fed Asynchronous Motor Vibration Monitoring and Fault Classification, Applying Continuous Wavelet Transform and Convolutional Neural Networks. Energies 2020, 13, 3690. [Google Scholar] [CrossRef]
- Sizov, G.Y.; Yeh, C.; Demerdash, N.A.O. Application of Piezoelectric Sensors to Rotor Fault Diagnostics in Squirrel-Cage Induction Machines. In Proceedings of the 2008 the IEEE Industry Applications Society Annual Meeting, Edmonton, AB, Canada, 5–9 October 2008; pp. 1–6. [Google Scholar] [CrossRef]
- Minervini, M.; Frosini, L.; Hasani, L.; Albini, A. A Multisensor Induction Motors Diagnostics Method for Bearing Cyclic Fault. In Proceedings of the 2020 International Conference on Electrical Machines (ICEM), Gothenburg, Sweden, 23–26 August 2020; Volume 1, pp. 1259–1265. [Google Scholar] [CrossRef]
- Lucas, G.; Rocha, M.; Castro, B.; Leão, J.; Andreoli, A. Stator Winding Fault Phase Identification Using Piezoelectric Sensors in Three-Phase Induction Motors. Eng. Proc. 2020, 2, 32. [Google Scholar] [CrossRef]
- Yoon, J.; He, D.; Van Hecke, B. On the Use of a Single Piezoelectric Strain Sensor for Wind Turbine Planetary Gearbox Fault Diagnosis. IEEE Trans. Ind. Electron. 2015, 62, 6585–6593. [Google Scholar] [CrossRef]
- Gama, L.; de Lima, W.B.; de Veneza, J.P.S. Detection of Shaft Misalignment Using Piezoelectric Strain Sensors. Exp. Tech. 2017, 41, 87–93. [Google Scholar] [CrossRef]
- Lucas, G.B.; de Castro, B.A.; Rocha, M.A.; Andreoli, A.L. Study of a Low-Cost Piezoelectric Sensor for Three Phase Induction Motor Load Estimation. Proceedings 2019, 4, 46. [Google Scholar] [CrossRef]
- Carvalho, L.; Lucas, G.; Rocha, M.; Fraga, C.; Andreoli, A. Undervoltage Identification in Three Phase Induction Motor Using Low-Cost Piezoelectric Sensors and STFT Technique. Proceedings 2020, 42, 72. [Google Scholar] [CrossRef]
- Iorgulescu, M.; Alexandru, M.; Beloiu, R. Noise and Vibration Monitoring for Diagnosis of DC Motor’s Faults. In Proceedings of the 2012 13th International Conference on Optimization of Electrical and Electronic Equipment (OPTIM), Brasov, Romania, 24–26 May 2012; pp. 724–729. [Google Scholar] [CrossRef]
- Zimnickas, T.; Vanagas, J.; Dambrauskas, K.; Kalvaitis, A.; Ažubalis, M. Application of Advanced Vibration Monitoring Systems and Long Short-Term Memory Networks for Brushless DC Motor Stator Fault Monitoring and Classification. Energies 2020, 13, 820. [Google Scholar] [CrossRef]
- Shifat, T.A.; Hur, J.W. An Effective Stator Fault Diagnosis Framework of BLDC Motor Based on Vibration and Current Signals. IEEE Access 2020, 8, 106968–106981. [Google Scholar] [CrossRef]
- Long, B.; Lim, S.T.; Ryo, J.H.; Chong, K.T. Energy-Regenerative Braking Control of Electric Vehicles Using Three-Phase Brushless Direct-Current Motors. Energies 2014, 7, 99–114. [Google Scholar] [CrossRef]
- Nandakumar, M.; Ramalingam, S.; Nallusamy, S.; Rangarajan, S.S. Hall-Sensor-Based Position Detection for Quick Reversal of Speed Control in a BLDC Motor Drive System for Industrial Applications. Electronics 2020, 9, 1149. [Google Scholar] [CrossRef]
- Huang, X.; Goodman, A.; Gerada, C.; Fang, Y.; Lu, Q. A Single Sided Matrix Converter Drive for a Brushless DC Motor in Aerospace Applications. IEEE Trans. Ind. Electron. 2012, 59, 3542–3552. [Google Scholar] [CrossRef]
- Tashakori, A.; Ektesabi, M. A Simple Fault Tolerant Control System for Hall Effect Sensors Failure of BLDC Motor. In Proceedings of the 2013 IEEE 8th Conference on Industrial Electronics and Applications (ICIEA), Melbourne, Australia, 19–21 June 2013; pp. 1011–1016. [Google Scholar] [CrossRef]
- Mitronikas, E.; Papathanasopoulos, D.; Athanasiou, G.; Tsotoulidis, S. Hall-effect Sensor Fault Identification in Brushless DC Motor Drives Using Wavelets. In Proceedings of the 2017 IEEE 11th International Symposium on Diagnostics for Electrical Machines, Power Electronics and Drives (SDEMPED), Tinos, Greece, 29 August–1 September 2017; pp. 434–440. [Google Scholar] [CrossRef]
- Gowtham, S.; Keerthana, I.; Balaji, M. Characterization and Classification of Hall Sensor Faults using S-Transform Analysis on BLDC Motor Drive. In Proceedings of the 2019 IEEE 1st International Conference on Energy, Systems and Information Processing (ICESIP), Chennai, India, 4–6 July 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Skóra, M.; Kowalski, C.T. The Influence of Sensor Faults on PM BLDC Motor Drive. In Proceedings of the 2015 International Conference on Electrical Drives and Power Electronics (EDPE), Tatranska Lomnica, Slovakia, 21–23 September 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Selmi, T.; Baitie, H.E.; Masmoudi, A. An Approach to Diagnose and Remediate Failures of Hall Effect Sensors in BLDC Motors. In Proceedings of the 2015 International Conference on Sustainable Mobility Applications, Renewables and Technology (SMART), Kuwait, Kuwait, 23–25 November 2015; pp. 1–7. [Google Scholar] [CrossRef]
- Sova, V.; Chalupa, J.; Grepl, R. Fault Tolerant BLDC Motor Control for Hall Sensors Failure. In Proceedings of the 2015 21st International Conference on Automation and Computing (ICAC), Glasgow, UK, 11–12 September 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Mehta, H.; Thakar, U.; Joshi, V.; Rathod, K.; Kurulkar, P. Hall Sensor Fault Detection and Fault Tolerant Control of PMSM Drive System. In Proceedings of the 2015 International Conference on Industrial Instrumentation and Control (ICIC), Pune, India, 28–30 May 2015; pp. 624–629. [Google Scholar] [CrossRef]
- Scelba, G.; De Donato, G.; Scarcella, G.; Capponi, F.G.; Bonaccorso, F. Fault-Tolerant Rotor Position and Velocity Estimation Using Binary Hall-Effect Sensors for Low-Cost Vector Control Drives. IEEE Trans. Ind. Appl. 2014, 50, 3403–3413. [Google Scholar] [CrossRef]
- Scelba, G.; De Donato, G.; Pulvirenti, M.; Capponi, F.G.; Scarcella, G. Hall-Effect Sensor Fault Detection, Identification, and Compensation in Brushless DC Drives. IEEE Trans. Ind. Appl. 2016, 52, 1542–1554. [Google Scholar] [CrossRef]
- Dong, L.; Huang, Y.; Jatskevich, J.; Liu, J. Improved Fault-Tolerant Control for Brushless Permanent Magnet Motor Drives With Defective Hall Sensors. IEEE Trans. Energy Convers. 2016, 31, 789–799. [Google Scholar] [CrossRef]
- Zhang, Q.; Feng, M. Fast Fault Diagnosis Method for Hall Sensors in Brushless DC Motor Drives. IEEE Trans. Power Electron. 2019, 34, 2585–2596. [Google Scholar] [CrossRef]
- Papathanasopoulos, D.A.; Mitronikas, E.D. Fault Tolerant Control of a Brushless DC Motor with Defective Position Sensors. In Proceedings of the 2018 XIII International Conference on Electrical Machines (ICEM), Alexandroupoli, Greece, 3–6 September 2018; pp. 1503–1509. [Google Scholar] [CrossRef]
- Mousmi Abbou, A.; El Houm, Y. Binary Diagnosis of Hall Effect Sensors in Brushless DC Motor Drives. IEEE Trans. Power Electron. 2020, 35, 3859–3868. [Google Scholar] [CrossRef]
- Aqil, M.; Hur, J. A Direct Redundancy Approach to Fault-Tolerant Control of BLDC Motor with a Damaged Hall-Effect Sensor. IEEE Trans. Power Electron. 2020, 35. [Google Scholar] [CrossRef]
- Papathanasopoulos, D.A.; Mitronikas, E.D.; Giannousakis, K.N.; Dermatas, E.S. An Alternative Approach for Condition Monitoring of Brushless DC Motor Drives. In Proceedings of the 2020 International Conference on Electrical Machines (ICEM), Gothenburg, Sweden, 23–26 August 2020; Volume 1, pp. 1280–1286. [Google Scholar] [CrossRef]
- Kasap, S. Principles of Electronic Materials and Devices, 3rd ed.; Tata McGraw-Hill: New Delhi, Delhi, India, 2005. [Google Scholar]
- De Freitas, E.S.; Baptista, F.G.; Budoya, D.E.; de Castro, B.A. Equivalent Circuit of Piezoelectric Diaphragms for Impedance-Based Structural Health Monitoring Applications. IEEE Sens. J. 2017, 17, 5537–5546. [Google Scholar] [CrossRef]
- Svilainis, L.; Dumbrava, V.; Motiejunas, G. Optimization of the Ultrasonic Excitation Stage. In Proceedings of the ITI 2008—30th International Conference on Information Technology Interfaces, Cavtat, Croatia, 23–26 June 2008. [Google Scholar]
- Elahi, H.; Munir, K.; Eugeni, M.; Abrar, M.; Khan, A.; Arshad, A.; Gaudenzi, P. A Review on Applications of Piezoelectric Materials in Aerospace Industry. Integr. Ferroelectr. 2020, 211, 25–44. [Google Scholar] [CrossRef]
- Shaikh, F.K.; Zeadally, S. Energy Harvesting in Wireless Sensor Networks: A Comprehensive Review. Renew. Sustain. Energy Rev. 2016, 55, 1041–1054. [Google Scholar] [CrossRef]
- Saoutieff, E.; Allain, M.; Nowicki-Bringuier, Y.-R.; Viana, A.; Pauliac-Vaujour, E. Integration of Piezoelectric Nanowires Matrix onto a Microelectronics Chip. Procedia Eng. 2016, 168, 1638–1641. [Google Scholar] [CrossRef]
- Yuan, T.-C.; Yang, J.; Chen, L.-Q. Nonlinear Dynamics of a Circular Piezoelectric Plate for Vibratory Energy Harvesting. Commun. Nonlinear Sci. Numer. Simul. 2018, 59, 651–656. [Google Scholar] [CrossRef]
- Kia, S.H.; Henao, H.; Capolino, G.-A. Efficient Digital Signal Processing Techniques for Induction Machines Fault Diagnosis. In Proceedings of the IEEE Workshop on Electrical Machines Design, Control and Diagnosis (WEMDCD), Paris, France, 11–12 March 2013; pp. 232–246. [Google Scholar] [CrossRef]
- Filippetti, F.; Bellini, A.; Capolino, G.-A. Condition Monitoring and Diagnosis of Rotor Faults in Induction Machines: State of Art and Future Perspectives. In Proceedings of the IEEE Workshop on Electrical Machines Design, Control and Diagnosis (WEMDCD), Paris, France, 11–12 March 2013; pp. 196–209. [Google Scholar] [CrossRef]
- Papathanasopoulos, D.A.; Spyropoulos, D.V.; Mitronikas, E.D. Fault Diagnosis of Misaligned Hall-effect Position Sensors in Brushless DC Motor Drives Using a Goertzel Algorithm. In Proceedings of the IEEE 12th International Symposium on Diagnostics for Electrical Machines, Power Electronics and Drives (SDEMPED), Toulouse, France, 27–30 August 2019; pp. 167–173. [Google Scholar] [CrossRef]
- Peña-Alzola, R.; Sztykiel, M.; Jones, C.E.; Norman, P.J.; Moore, G.; Pou, J.; Burt, G.M. First-Fault Detection in DC Distribution with IT Grounding Based on Sliding Discrete Fourier-Transform. IEEE Trans. Power Electron. 2021, 36, 3649–3654. [Google Scholar] [CrossRef]
- Papathanasopoulos, D.A.; Spyropoulos, D.V.; Mitronikas, E.D.; Karlis, A.D. Commutation Angle Self-Calibrating Technique for Brushless DC Motor Drives with Defective Hall-effect Position Sensors. In Proceedings of the 2020 International Conference on Electrical Machines (ICEM), Gothenburg, Sweden, 23–26 August 2020; Volume 1, pp. 1301–1307. [Google Scholar] [CrossRef]
- Spyropoulos, D.V.; Mitronikas, E.D.; Dermatas, E.S. Broken Rotor Bar Fault Diagnosis in Induction Motors Using a Goertzel Algorithm. In Proceedings of the 2018 XIII International Conference on Electrical Machines (ICEM), Alexandroupoli, Greece, 3–6 September 2018; pp. 1782–1788. [Google Scholar] [CrossRef]
- Sundararajan, P.; Sathik, M.H.M.; Sasongko, F.; Tan, C.S.; Pou, J.; Blaabjerg, F.; Gupta, A.K. Condition Monitoring of DC-Link Capacitors Using Goertzel Algorithm for Failure Precursor Parameter and Temperature Estimation. IEEE Trans. Power Electron. 2020, 35, 6386–6396. [Google Scholar] [CrossRef]
- Song, X.; Wang, Z.; Li, S.; Hu, J. Sensorless Speed Estimation of an Inverter-Fed Induction Motor Using the Supply-Side Current. IEEE Trans. Energy Convers. 2019, 34, 1432–1441. [Google Scholar] [CrossRef]
- Singh, B.; Reddy, C.C. Fast Goertzel Algorithm and RLS-Adaptive Filter Based Reference Current Extraction for Grid-Connected System. In Proceedings of the 2020 IEEE PES Innovative Smart Grid Technologies Europe (ISGT-Europe), The Hague, The Netherlands, 26–28 October 2020; pp. 156–160. [Google Scholar] [CrossRef]
- Sysel, P.; Rajmic, P. Goertzel Algorithm Generalized to Non-Integer Multiples of Fundamental Frequency. EURASIP J. Adv. Signal Process. 2012, 1–8. [Google Scholar] [CrossRef]
- Papathanasopoulos, D.A.; Mitronikas, E.D. Diagnosis of Defective Hall-effect Position Sensors in Brushless DC Motor Drives. In Proceedings of the IEEE Workshop on Electrical Machines Design, Control and Diagnosis (WEMDCD), Athens, Greece, 22–23 April 2019; pp. 137–142. [Google Scholar] [CrossRef]
- Papathanasopoulos, D.A.; Mitronikas, E.D. Evaluation of the Virtual Third Harmonic Back-EMF in Identifying Misaligned Hall-effect Position Sensors in Brushless DC Motor Drives. In Proceedings of the IEEE 12th International Symposium on Diagnostics for Electrical Machines, Power Electronics and Drives (SDEMPED), Toulouse, France, 27–30 August 2019; pp. 181–187. [Google Scholar] [CrossRef]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sector | Sensor A | Sensor B | Sensor C | Active Switches | Active Windings |
|---|---|---|---|---|---|
| a | 1 | 0 | 1 | Q1, Q4 | A+, B− |
| b | 1 | 0 | 0 | Q1, Q6 | A+, C− |
| c | 1 | 1 | 0 | Q3, Q6 | B+, C− |
| d | 0 | 1 | 0 | Q3, Q2 | B+, A− |
| e | 0 | 1 | 1 | Q5, Q2 | C+, A− |
| f | 0 | 0 | 1 | Q5, Q4 | C+, B− |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Nominal Power (W) | 660 | Stator phase resistance (Ω) | 0.08 |
| Nominal Voltage (V) | 48 | Stator phase Inductance (mH) | 0.15 |
| Pole Pairs | 4 | Torque constant (Nm/A) | 0.11 |
| Nominal Speed (rpm) | 3000 | Back-EMF constant (V/krpm) | 11.5 |
| Nominal Torque (Nm) | 2.1 | Rotor inertia (g cm2) | 2400 |
| Sector | Healthy Configuration | Defective Configuration Sensor A at High Level | Defective Configuration Sensor A at Low Level | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Sensor A | Sensor B | Sensor C | Sensor A | Sensor B | Sensor C | Sensor A | Sensor B | Sensor C | |
| b | 1 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 |
| c | 1 | 1 | 0 | 1 | 1 | 0 | 0 | 1 | 0 |
| d | 0 | 1 | 0 | 1 | 1 | 0 | 0 | 1 | 0 |
| e | 0 | 1 | 1 | 1 | 1 | 1 | 0 | 1 | 1 |
| f | 0 | 0 | 1 | 1 | 0 | 1 | 0 | 0 | 1 |
| a | 1 | 0 | 1 | 1 | 0 | 1 | 0 | 0 | 1 |
| Sector | Healthy Configuration | Defective Configuration I | Defective Configuration II | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Sensor A | Sensor B | Sensor C | Sensor A | Sensor B | Sensor C | Sensor A | Sensor B | Sensor C | |
| f | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 1 |
| a | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 1 |
| b | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 |
| c | 1 | 1 | 0 | 0 | 1 | 0 | 0 | 1 | 1 |
| d | 0 | 1 | 0 | 0 | 1 | 0 | 0 | 1 | 1 |
| e | 0 | 1 | 1 | 0 | 1 | 0 | 0 | 1 | 1 |
| Sector | Healthy Configuration | Defective Configuration I | Defective Configuration II | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Sensor A | Sensor B | Sensor C | Sensor A | Sensor B | Sensor C | Sensor A | Sensor B | Sensor C | |
| c | 1 | 1 | 0 | 1 | 1 | 0 | 1 | 1 | 1 |
| d | 0 | 1 | 0 | 1 | 1 | 0 | 1 | 1 | 1 |
| e | 0 | 1 | 1 | 1 | 1 | 0 | 1 | 1 | 1 |
| f | 0 | 0 | 1 | 1 | 0 | 0 | 1 | 0 | 1 |
| a | 1 | 0 | 1 | 1 | 0 | 0 | 1 | 0 | 1 |
| b | 1 | 0 | 0 | 1 | 0 | 0 | 1 | 0 | 1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Papathanasopoulos, D.A.; Giannousakis, K.N.; Dermatas, E.S.; Mitronikas, E.D. Vibration Monitoring for Position Sensor Fault Diagnosis in Brushless DC Motor Drives. Energies 2021, 14, 2248. https://doi.org/10.3390/en14082248
Papathanasopoulos DA, Giannousakis KN, Dermatas ES, Mitronikas ED. Vibration Monitoring for Position Sensor Fault Diagnosis in Brushless DC Motor Drives. Energies. 2021; 14(8):2248. https://doi.org/10.3390/en14082248
Chicago/Turabian StylePapathanasopoulos, Dimitrios A., Konstantinos N. Giannousakis, Evangelos S. Dermatas, and Epaminondas D. Mitronikas. 2021. "Vibration Monitoring for Position Sensor Fault Diagnosis in Brushless DC Motor Drives" Energies 14, no. 8: 2248. https://doi.org/10.3390/en14082248
APA StylePapathanasopoulos, D. A., Giannousakis, K. N., Dermatas, E. S., & Mitronikas, E. D. (2021). Vibration Monitoring for Position Sensor Fault Diagnosis in Brushless DC Motor Drives. Energies, 14(8), 2248. https://doi.org/10.3390/en14082248