
Simulation Verification of Overcurrent Protection Operation in Power Networks Integrating Renewable Energy Sources in Energy Communities


Abstract
1. Introduction
2. PSP on MV Line Connection of EC with PS
- short-circuit overcurrent protection (symbol I>>);
- time-delayed overcurrent protection (symbol I>).
3. MV Line Overcurrent Protection Model and the Network Simulation Model
3.1. Model of the MV Line Overcurrent Protection
- filtering—a function designed to extract the fundamental harmonic from the signal, which is necessary to calculate the protection criterion;
- orthogonalization—a function designed to determine orthogonal components of the signal, which are facilitating the calculation of the criterion value of the protection.
- for the real component:
- for the imaginary component:
- if ≥ or (depending on the protection function), the protection is triggered and an impulse is sent to the circuit breaker in the line (after the set time delay)-such relation of I1h and Iset values is treated as a fault occurs in the line;
- if < or , the protection will not tripping because such a relation between and is treated as a normal state of the line.
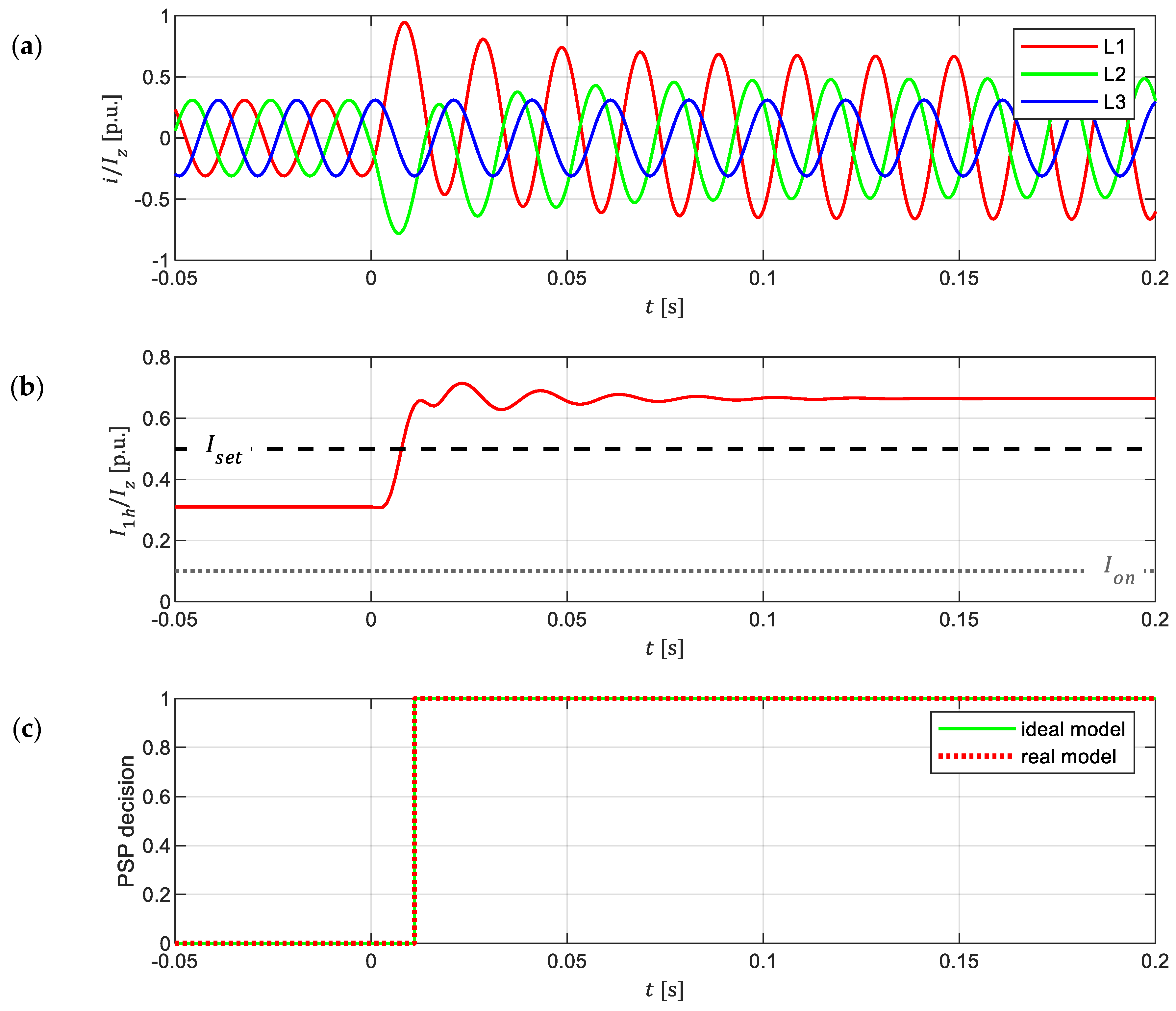
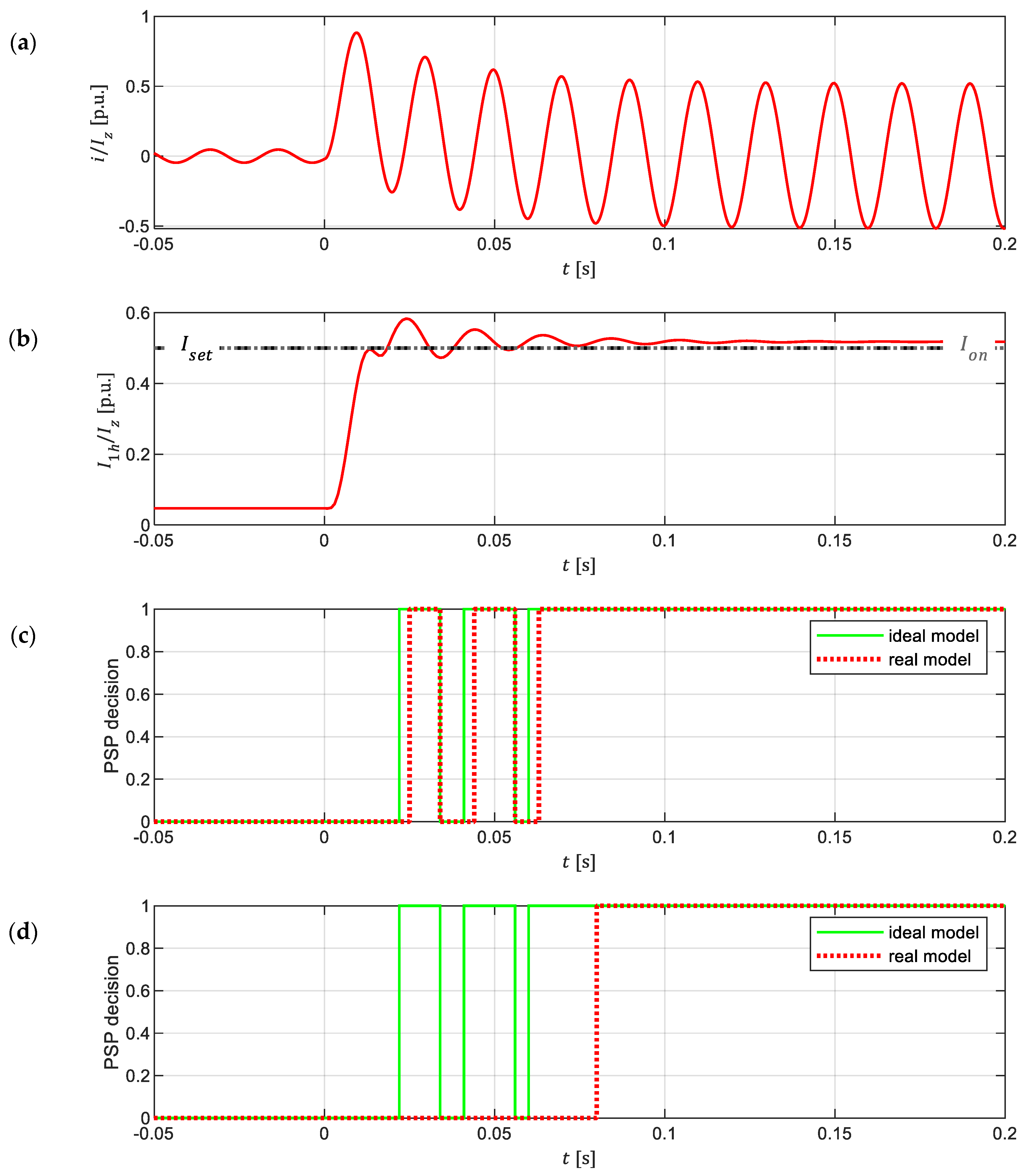
- an ideal model, in which all elements of the protection function are implemented for each value of the current signal supplied to the PSP;
- a real model, in which the execution of the block decision is made only for those criterion values that have been determined for the value exceeding the decision algorithm activity threshold.
3.2. Dynamic Model of a Network System Which Is Represented on PS with EC
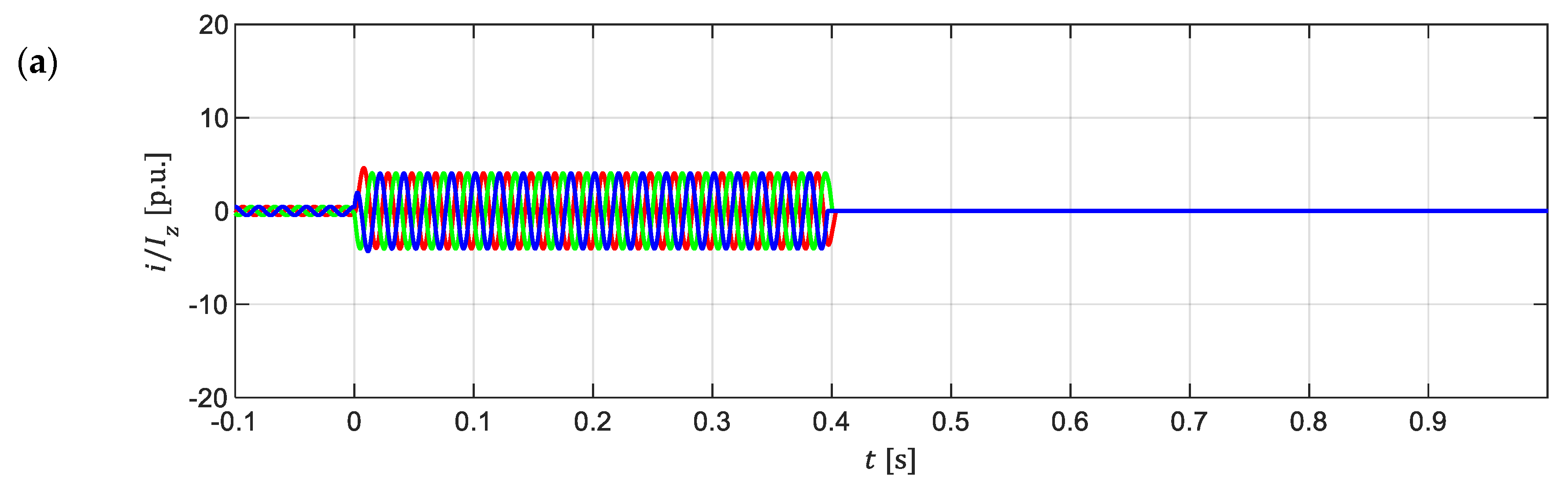
4. Simulation Results of the Operating Conditions of MV Line Overcurrent Protection
- impact of the decision algorithm activity threshold value on the protection operation time;
- influence of the value of n in the n-sample criterion on the protection tripping time.
4.1. Influence of the Decision Algorithm Activity Threshold on the Protection Operation Time
4.2. Influence of the n Value of the n-Sample Criterion on the Protection Operation Time
5. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Szablicki, M.; Rzepka, P.; Halinka, A.; Sowa, P. Diagnosis of challenges for power system protection—Selected aspects of transformation of power systems. In Proceedings of the International Conference Modern Electric Power Systems (MEPS), Wroclaw, Poland, 9–12 September 2019. [Google Scholar]
- European Union. Regulation (EC) No 714/2009 of the European Parliament and of the Council of 13 July 2009 on Conditions for Access to the Network for Cross-Border Exchanges in Electricity and Repealing Regulation (EC) No 1228/2003; European Union: Brussels, Belgium, 2009. [Google Scholar]
- Szablicki, M.; Rzepka, P.; Kielak, R.; Grzelka, M. Connection network code’s requirements for power system protection (Wymagania przyłączeniowych kodeksów sieci dla elektroenergetycznej automatyki zabezpieczeniowej). In Proceedings of the XXI Ogólnopolska Konferencja Zabezpieczenia Przekaźnikowe w Energetyce, Opalenica, Poland, 17–19 October 2018. [Google Scholar]
- Lubośny, Z. Wind Farm in Power System (Farmy Wiatrowe w Systemie Elektroenergetycznym); WNT: Warszawa, Poland, 2009. [Google Scholar]
- Sumei, L.; Tiansku, B.; Yanlin, L. Theoretical Analysis on the Short-Circuit Current of Inverter-Interfaced Renewable Energy Generators with Fault-Ride-Through Capability. Sustainability 2018, 10, 44. [Google Scholar]
- Yan, H.Y.; Feng, W. Short-Circuit Current Analysis for DFIG Wind Farm Considering the Action of a Crowbar. Energies 2018, 11, 425. [Google Scholar] [CrossRef]
- Voima, S.; Kauhaniemi, K. Using distance protection in smart grid environment. In Proceedings of the IEEE PES Innovative Smart Grid Technologies, Istanbul, Turkey, 12–15 October 2014. [Google Scholar]
- Solak, K.; Herlender, J.; Iżykowski, J. Transmission line impedance-differential protection with improved stabilization for external fault cases. In Proceedings of the 19th International Scientific Conference on Electric Power Engineering (EPE), Brno, Czech Republic, 16–18 May 2018. [Google Scholar]
- Brusilowicz, B.; Łukowicz, M.; Michalik, M.; Rebizant, W.; Schiel, L. Sensitivity comparison of admittance and watt-metric criteria for ground fault detection. In Proceedings of the 13th International Conference on Development in Power System Protection (DPSP), Edinburgh, UK, 7–10 March 2016. [Google Scholar]
- Halinka, A.; Rzepka, P.; Sowa, P.; Szablicki, M. New area measuring and decision algorithm concepts for power lines’ distance protection. In Proceedings of the 18th International Scientific Conference on Electric Power Engineering (EPE), Brno, Czech Republic, 17–19 May 2017. [Google Scholar]
- Halinka, A.; Rzepka, P.; Szablicki, M. Agent model of multi-agent system for area power system protection. In Proceedings of the Modern Electric Power System Conference (MEPS), Wroclaw, Poland, 6–9 July 2015. [Google Scholar]
- Strickland, D.; Varnosfederani, M.A.; Scott, J.; Quintela, P.; Duran, A.; Bravery, R.; Corliss, A.; Ashworth, K.; Blois-Brooke, S. A review of community electrical energy systems. In Proceedings of the IEEE International Conference on Renewable Energy Research and Applications (ICRERA), Birmingham, UK, 20–23 November 2016. [Google Scholar]
- Rzepka, P.; Sołtysik, M.; Szablicki, M. Models of energy clusters functioning (Modele funkcjonowania klastrów energii). Energetyka 2018, 2, 75–80. [Google Scholar]
- Szablicki, M.; Rzepka, P.; Sołtysik, M.; Czapaj, R. The idea of non-restricted use of LV networks by electricity consumers, producers, and prosumers. E3S Web Conf. 2019, 84, 1–8. [Google Scholar] [CrossRef]
- Szablicki, M.; Rzepka, P.; Wronka, A.; Dziendziel, A. The potential of energy clusters as the sources of missing power in the Polish Power System in the perspective of conventional units withdrawal (Potencjał klastrów energii jako źródeł brakującej mocy w KSE w perspektywie wycofywania jednostek konwencjonalnych). Rynek Energii 2019, 2, 35–40. [Google Scholar]
- Ziegler, G. Numerical Distance Protection: Principles and Applications, Berlin and Munich; John Wiley & Sons: Hoboken, NJ, USA, 1999. [Google Scholar]
- Hoppel, W. Protection Settings in MV Lines with Reclosers (Nastawy zabezpieczeń w liniach SN z reklozerami). Automatyka-Elektr. Zakłócenia 2017, 27, 6–21. [Google Scholar] [CrossRef]
- Szafran, J.; Wiszniewski, A. Measurement and Decision Algorithms of Digital Power System Protection (Algorytmy Pomiarowe i Decyzyjne Cyfrowej Automatyki Elektroenergetycznej); WNT: Warszawa, Poland, 2001. [Google Scholar]
- Szablicki, M. Area Adaptive Protection System on the High Voltage Multi-Ended Power Lines with Connected Wind Generation (Obszarowa Adaptacyjna Automatyka Zabezpieczeniowa Linii Elektroenergetycznych WN z Odczepowo Przyłączonymi Źródłami Wiatrowymi). Ph.D. Thesis, Silesian University of Technology, Gliwice, Poland, 2013. [Google Scholar]





 representation of an analog signal;
representation of an analog signal;  representation of a digital signal).
representation of an analog signal; representation of a digital signal).
representation of a digital signal).
representation of an analog signal; representation of a digital signal).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| PS Short-Circuit Power [MVA] | The Maximum Value of the Current in the First Moments of the Short Circuit [kA] | The Value of the Current in the Quasi-Steady State of Short-Circuit [kA] |
|---|---|---|
| 4 | 0.16 | 0.15 |
| 40 | 1.61 | 1.41 |
| 400 | 11.93 | 10.33 |
| PS Short-Circuit Power [MVA] | Time of Protection Operation for the Real Model [ms] | Time of Protection Operation for the Ideal Model [ms] |
|---|---|---|
| Threshold 10% | ||
| 4 | 22 | 22 |
| 40 | 15 | 7 |
| 400 | 14 | 5 |
| Threshold 20% | ||
| 4 | 22 | 22 |
| 40 | 16 | 7 |
| 400 | 15 | 5 |
| Threshold 30% | ||
| 4 | 22 | 22 |
| 40 | 16 | 7 |
| 400 | 15 | 5 |
| Threshold 40% | ||
| 4 | 23 | 22 |
| 40 | 17 | 7 |
| 400 | 15 | 5 |
| Threshold 50% | ||
| 4 | 41 | 22 |
| 40 | 17 | 7 |
| 400 | 15 | 5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Szablicki, M.; Rzepka, P.; Halinka, A. Simulation Verification of Overcurrent Protection Operation in Power Networks Integrating Renewable Energy Sources in Energy Communities. Energies 2021, 14, 2193. https://doi.org/10.3390/en14082193
Szablicki M, Rzepka P, Halinka A. Simulation Verification of Overcurrent Protection Operation in Power Networks Integrating Renewable Energy Sources in Energy Communities. Energies. 2021; 14(8):2193. https://doi.org/10.3390/en14082193
Chicago/Turabian StyleSzablicki, Mateusz, Piotr Rzepka, and Adrian Halinka. 2021. "Simulation Verification of Overcurrent Protection Operation in Power Networks Integrating Renewable Energy Sources in Energy Communities" Energies 14, no. 8: 2193. https://doi.org/10.3390/en14082193
APA StyleSzablicki, M., Rzepka, P., & Halinka, A. (2021). Simulation Verification of Overcurrent Protection Operation in Power Networks Integrating Renewable Energy Sources in Energy Communities. Energies, 14(8), 2193. https://doi.org/10.3390/en14082193