
Optimization and Characteristics Analysis of High Torque Density 12/8 Switched Reluctance Motor Using Metaheuristic Gray Wolf Optimization Algorithm



Abstract
1. Introduction
2. Design of Proposed SRM
2.1. Design Target
2.2. Design Considerations
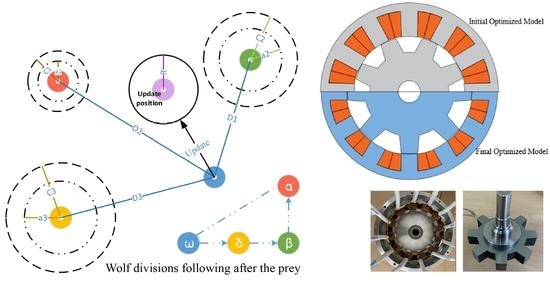
3. The Gray Wolf Optimizer (GWO)
4. SRM Optimization Process
4.1. Modeling of GWO-FEMM Objective Function
4.2. Optimization Process
4.3. Optimization Results
5. Experimental Results of Prototype 12/8 SRM
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Zeraoulia, M.; Benbouzid, M.; Diallo, D. Electric Motor Drive Selection Issues for HEV Propulsion Systems: A Comparative Study. In 2005 IEEE Vehicle Power and Propulsion Conference; IEEE: Piscataway, NJ, USA, 2005; p. 8. [Google Scholar]
- Williamson, S.S.; Emadi, A.; Rajashekara, K. Comprehensive Efficiency Modeling of Electric Traction Motor Drives for Hybrid Electric Vehicle Propulsion Applications. IEEE Trans. Veh. Technol. 2007, 56, 1561–1572. [Google Scholar] [CrossRef]
- Zhu, Y.; Wei, W.; Yang, C.; Zhang, Y. Multi-objective optimisation design of two-phase excitation switched reluctance motor for electric vehicles. IET Electr. Power Appl. 2018, 12, 929–937. [Google Scholar] [CrossRef]
- Chau, K.T. Electric Vehicle Machines and Drives: Design, Analysis and Application, 1st ed.; Wiley-IEEE Press: Chichester, UK, 2015. [Google Scholar]
- Husain, I. Electric and Hybrid Vehicles: Design Fundamentals, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2010. [Google Scholar]
- Ahn, J.-W.; Lukman, G.F.L. Switched reluctance motor: Research trends and overview. China Electrotech. Soc. Trans. Electr. Mach. Syst. 2018, 2, 339–347. [Google Scholar] [CrossRef]
- Rahman, K.; Fahimi, B.; Suresh, G.; Rajarathnam, A.; Ehsani, M. Advantages of switched reluctance motor applications to EV and HEV: design and control issues. IEEE Trans. Ind. Appl. 2000, 36, 111–121. [Google Scholar] [CrossRef]
- Widmer, J.D.; Martin, R.; Mecrow, B.C. Optimisation of an 80 kW Segmental Rotor Switched Reluctance Machine for automotive traction. In 2013 International Electric Machines & Drives Conference; IEEE: Piscataway, NJ, USA, 2013; pp. 427–433. [Google Scholar]
- Navardi, M.J.; Babaghorbani, B.; Ketabi, A. Efficiency improvement and torque ripple minimization of Switched Reluctance Motor using FEM and Seeker Optimization Algorithm. Energy Convers. Manag. 2014, 78, 237–244. [Google Scholar] [CrossRef]
- Wu, W.; Dunlop, J.; Collocott, S.; Kalan, B. Design optimization of a switched reluctance motor by electromagnetic and thermal finite-element analysis. IEEE Trans. Magn. 2003, 39, 3334–3336. [Google Scholar] [CrossRef]
- Balaji, M.; Kamaraj, V. Design optimization of Switched Reluctance Machine using Particle Swarm Optimization. In Proceedings of the 2011 1st International Conference on Electrical Energy Systems, Chennai, India, 3–5 January 2011; pp. 164–169. [Google Scholar]
- Gao, J.; Sun, H.; He, L.; Dong, Y.; Zheng, Y. Optimization design of Switched Reluctance Motor based on Particle Swarm Optimization. In Proceedings of the 2011 International Conference on Electrical Machines and Systems, Beijing, China, 20–23 August 2011; pp. 1–5. [Google Scholar]
- Ma, C.; Qu, L. Multiobjective Optimization of Switched Reluctance Motors Based on Design of Experiments and Particle Swarm Optimization. IEEE Trans. Energy Convers. 2015, 30, 1144–1153. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey Wolf Optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef]
- Lei, G.; Zhu, J.; Guo, Y.; Liu, C.; Ma, B. A Review of Design Optimization Methods for Electrical Machines. Energies 2017, 10, 1962. [Google Scholar] [CrossRef]
- Ringuest, J.L. Multiobjective Optimization: Behavioral and Computational Considerations; Springer Science and Business Media LLC: Berlin/Heidelberg, Germany, 1992. [Google Scholar]
- Bilgin, B.; Jiang, J.W.; Emadi, A. (Eds.) Switched Reluctance Motor Drives: Fundamentals to Applications, 1st ed.; CRC Press: Boca Raton, FL, USA, 2019. [Google Scholar]
- Miller, T.J.E. Switched Reluctance Motors and Their Control; Clarendon Press: Hillsboro, OH, USA; Oxford, UK, 1993. [Google Scholar]
- Krishnan, R. Switched Reluctance Motor Drives: Modeling, Simulation, Analysis, Design, and Applications, 1st ed.; CRC Press: Boca Raton, FL, USA, 2001. [Google Scholar]
- Desai, P.C.; Krishnamurthy, M.; Schofield, N.; Emadi, A. Novel Switched Reluctance Machine Configuration with Higher Number of Rotor Poles Than Stator Poles: Concept to Implementation. IEEE Trans. Ind. Electron. 2009, 57, 649–659. [Google Scholar] [CrossRef]
- Dai, S.; Niu, D.; Han, Y. Forecasting of Power Grid Investment in China Based on Support Vector Machine Optimized by Differential Evolution Algorithm and Grey Wolf Optimization Algorithm. Appl. Sci. 2018, 8, 636. [Google Scholar] [CrossRef]
- Li, X.; Luk, K.M. The Grey Wolf Optimizer and Its Applications in Electromagnetics. IEEE Trans. Antennas Propag. 2019, 68, 2186–2197. [Google Scholar] [CrossRef]
- Chen, Y.; Pillay, P. An improved formula for lamination core loss calculations in machines operating with high frequency and high flux density excitation. In Proceedings of the Conference Record of the 2002 IEEE Industry Applications Conference. 37th IAS Annual Meeting (Cat. No.02CH37344), Pittsburgh, PA, USA, 13–18 October 2002; Volume 2, p. 766. [Google Scholar]
- Kampen, D.; Owzareck, M.; Beyer, S.; Parspour, N.; Schmitt, S. Analytical core loss models for electrical steel in power electronic applications. In Proceedings of the 2012 13th International Conference on Optimization of Electrical and Electronic Equipment (OPTIM), Brasov, Romania, 24–26 May 2012; pp. 109–117. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Volume [L] | 0.5 |
| Output power [kW] | 1.8 |
| Efficiency [%] | 85 |
| Noise [dB] | 80 |
| Torque density [Nm/L] | ≥8 |
| Parameters | Value |
|---|---|
| Volume [L] | 0.5 |
| Air-gap () [mm] | 0.30 |
| Shaft diameter () [mm] | 20 |
| Lamination core material | 35PN210 |
| Lamination thickness [mm] | 0.35 |
| Parameters | Value |
|---|---|
| Stator outer diameter () [mm] | |
| Bore diameter () [mm] | |
| Stator pole arc () [deg] | |
| Rotor pole arc () [deg] | |
| Stator tapper angle () [deg] | |
| Rotor tapper angle () [deg] | |
| Stator yoke ratio () | |
| Rotor yoke ratio () | |
| MMF [AT] | |
| Fill factor (FF) [%] |
| Parameters | Initial Value | Final Value |
|---|---|---|
| Stator outer diameter [mm] | 161.6 | 160 |
| Stack length [mm] | 20.8 | 19.0 |
| Axial length [mm] | 24.4 | 25 |
| Rotor outer diameter [mm] | 99.6 | 112.9 |
| Shaft diameter [mm] | 20 | 20 |
| Stator pole arc [deg] | 16.5 | 15 |
| Rotor pole arc [deg] | 17.1 | 15.5 |
| Stator tapper angle [deg] | 1.7 | 1.0 |
| Rotor tapper angle [deg] | 6.3 | 4.5 |
| Parameters | Conventional SRMs | Proposed 12/8 SRM | |||
|---|---|---|---|---|---|
| 6/4 | 8/6 | 12/8 | Simulation | Experimental | |
| Output power [kW] | 0.52 | 0.51 | 0.50 | 1.85 | 1.80 |
| Speed [rpm] | 2800 | 4100 | |||
| Volume [L] | 0.35 | 0.50 | |||
| Torque [Nm] | 1.77 | 1.74 | 1.71 | 4.35 | 4.20 |
| Torque density [Nm/L] | 5.10 | 4.98 | 4.89 | 8.60 | 8.40 |
| Power density [kW/L] | 1.49 | 1.46 | 1.43 | 3.70 | 3.60 |
| Efficiency [%] | 83.70 | 84.14 | 83.65 | 89.40 | 85.60 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rahman, M.S.; Lukman, G.F.; Hieu, P.T.; Jeong, K.-I.; Ahn, J.-W. Optimization and Characteristics Analysis of High Torque Density 12/8 Switched Reluctance Motor Using Metaheuristic Gray Wolf Optimization Algorithm. Energies 2021, 14, 2013. https://doi.org/10.3390/en14072013
Rahman MS, Lukman GF, Hieu PT, Jeong K-I, Ahn J-W. Optimization and Characteristics Analysis of High Torque Density 12/8 Switched Reluctance Motor Using Metaheuristic Gray Wolf Optimization Algorithm. Energies. 2021; 14(7):2013. https://doi.org/10.3390/en14072013
Chicago/Turabian StyleRahman, Md Sydur, Grace Firsta Lukman, Pham Trung Hieu, Kwang-Il Jeong, and Jin-Woo Ahn. 2021. "Optimization and Characteristics Analysis of High Torque Density 12/8 Switched Reluctance Motor Using Metaheuristic Gray Wolf Optimization Algorithm" Energies 14, no. 7: 2013. https://doi.org/10.3390/en14072013
APA StyleRahman, M. S., Lukman, G. F., Hieu, P. T., Jeong, K.-I., & Ahn, J.-W. (2021). Optimization and Characteristics Analysis of High Torque Density 12/8 Switched Reluctance Motor Using Metaheuristic Gray Wolf Optimization Algorithm. Energies, 14(7), 2013. https://doi.org/10.3390/en14072013