
Electric Vehicle Charger Static and Dynamic Modelling for Power System Studies

Abstract
1. Introduction
2. Load Modelling and Curve Fitting
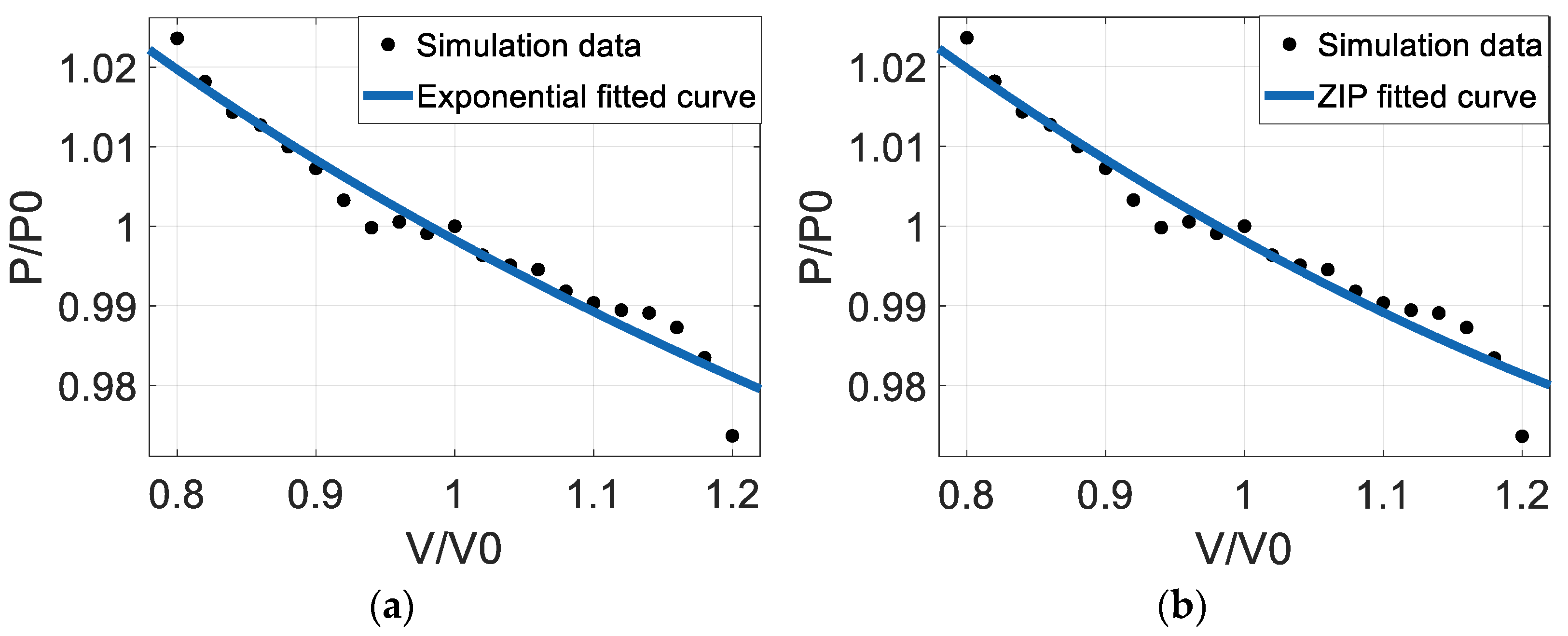
2.1. Static Load Models
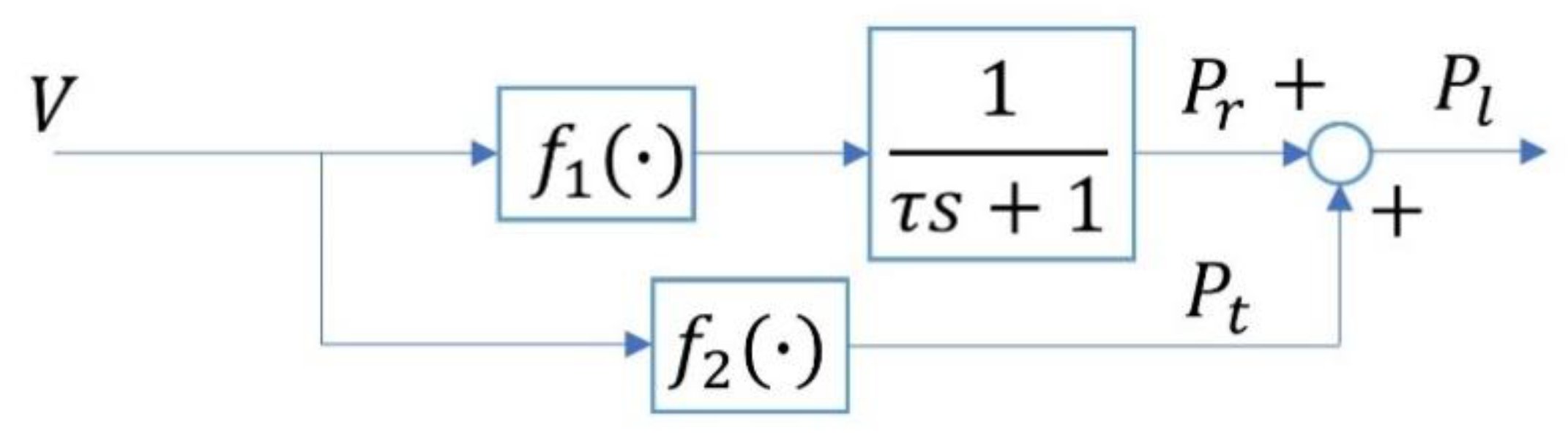
2.2. Dynamic Load Models
3. Detailed EV Charger Models
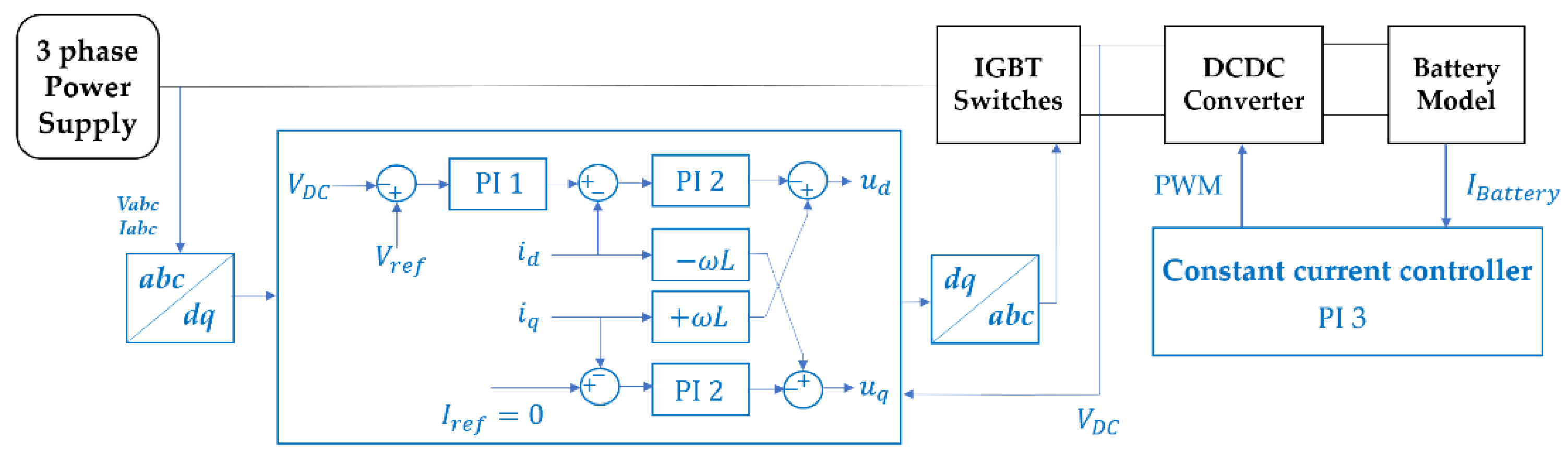
3.1. Approach A–Typical EV Slow Charger
3.2. Approach B–Typical EV Fast Charger
4. Result of EV Load Model Parameters
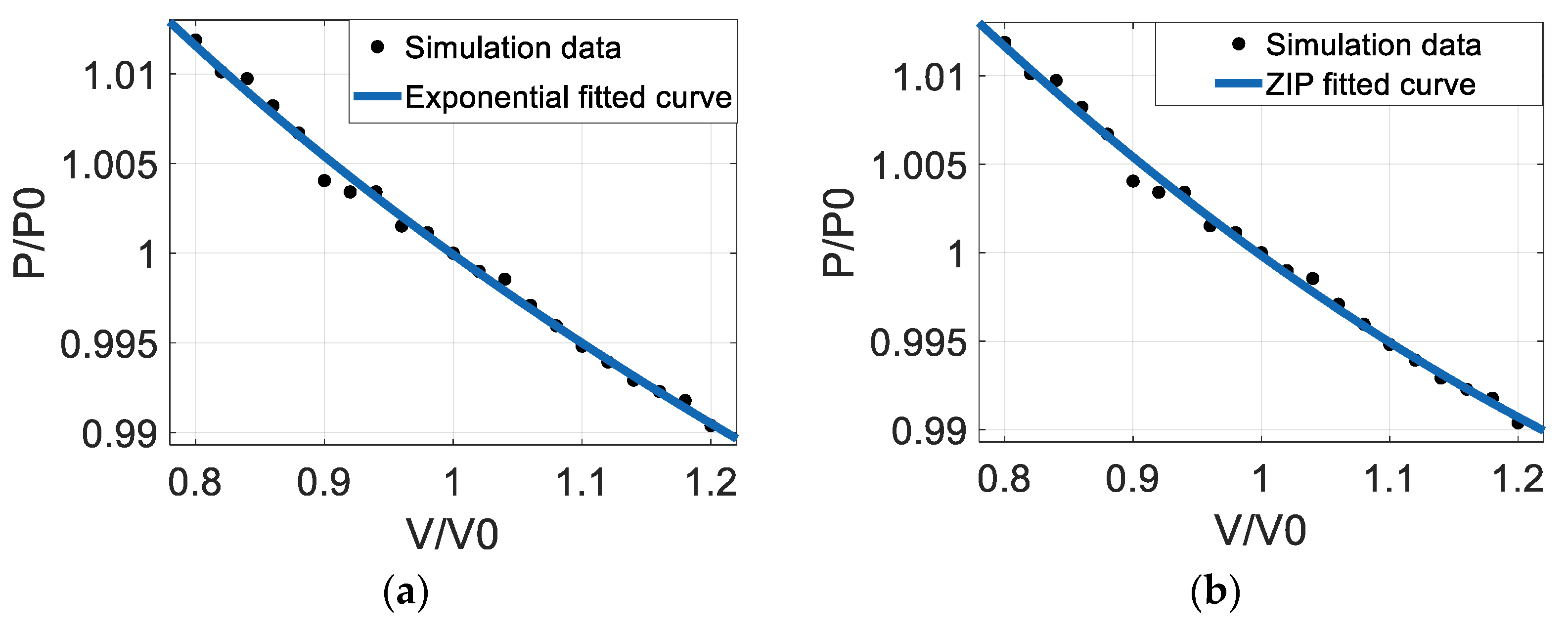
4.1. Static Load Model Parameters for Charging Approaches A & B
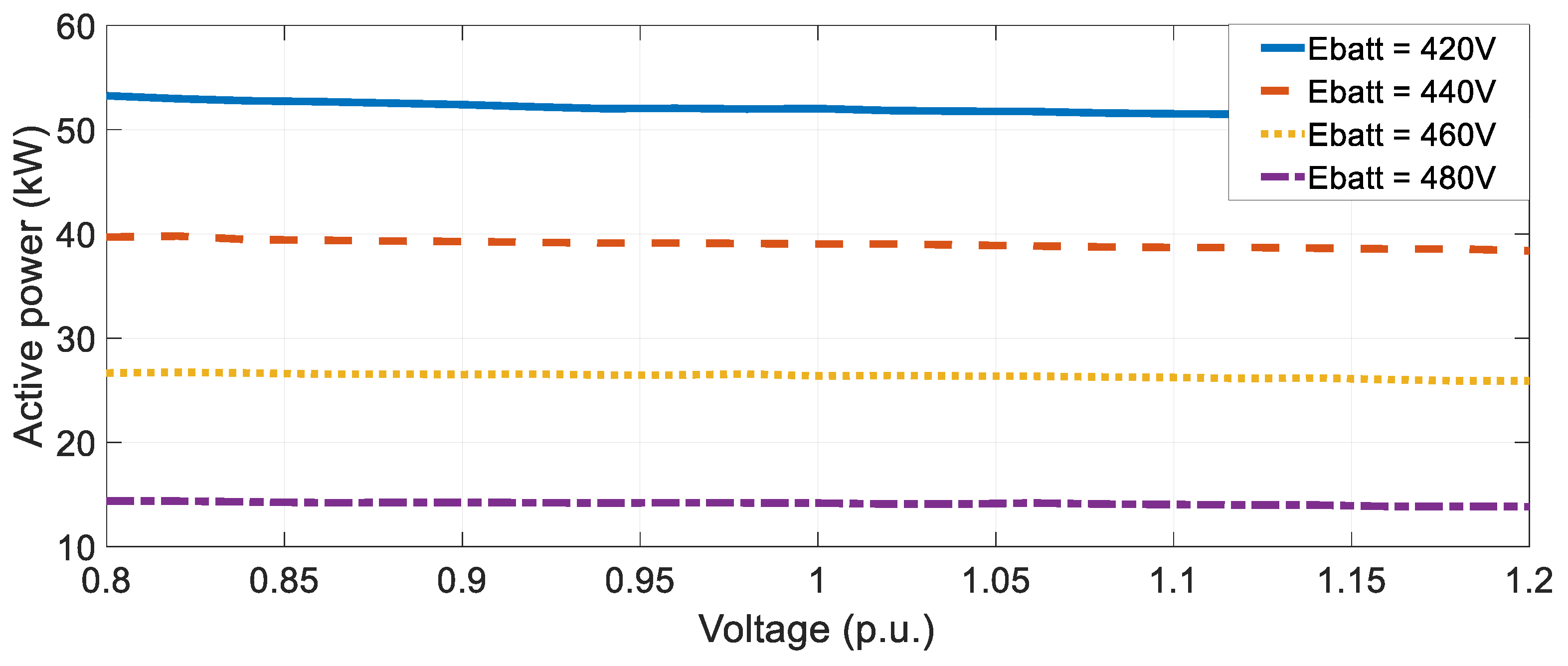
4.2. High SoC Battery Static Load Model Analysis
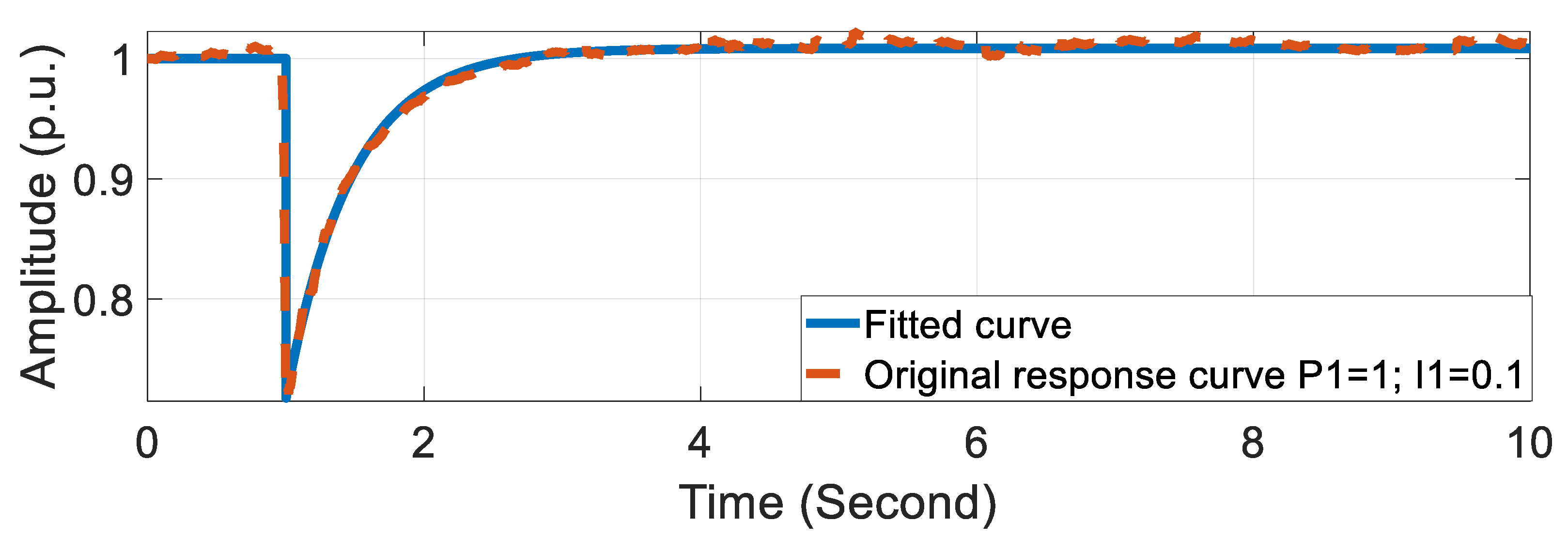
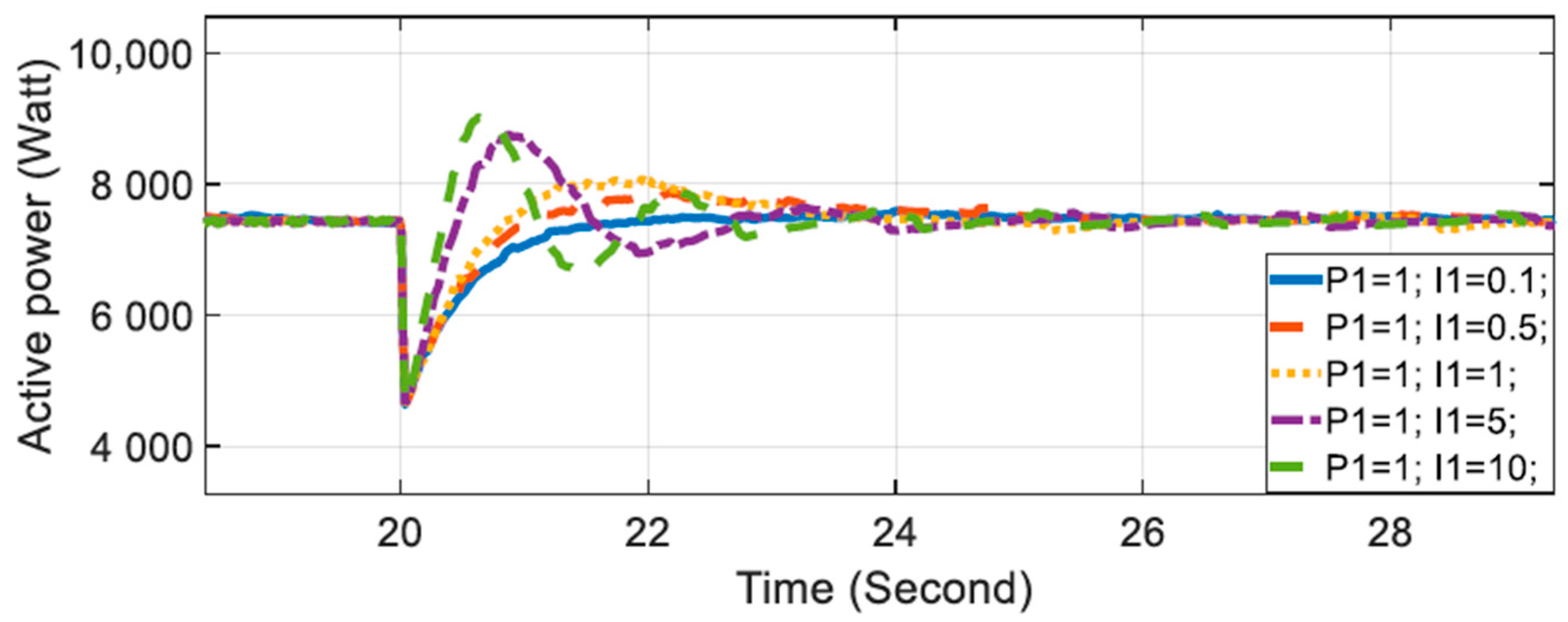
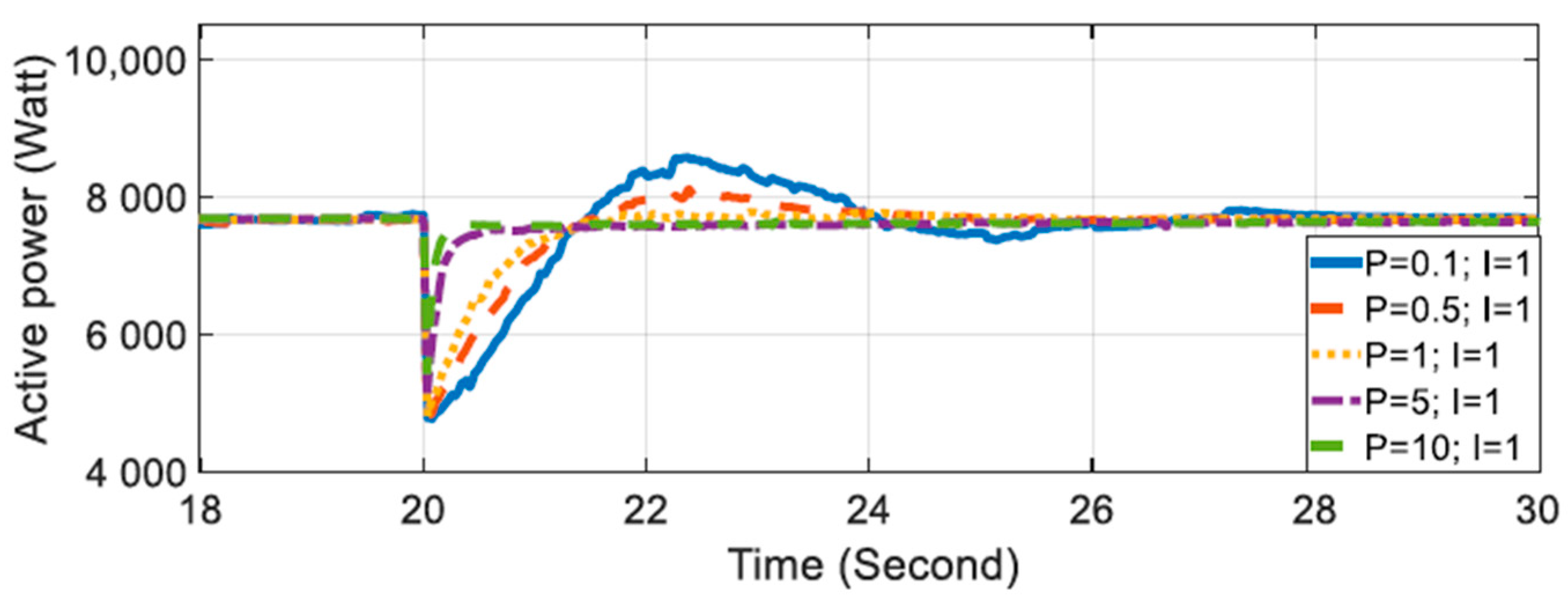
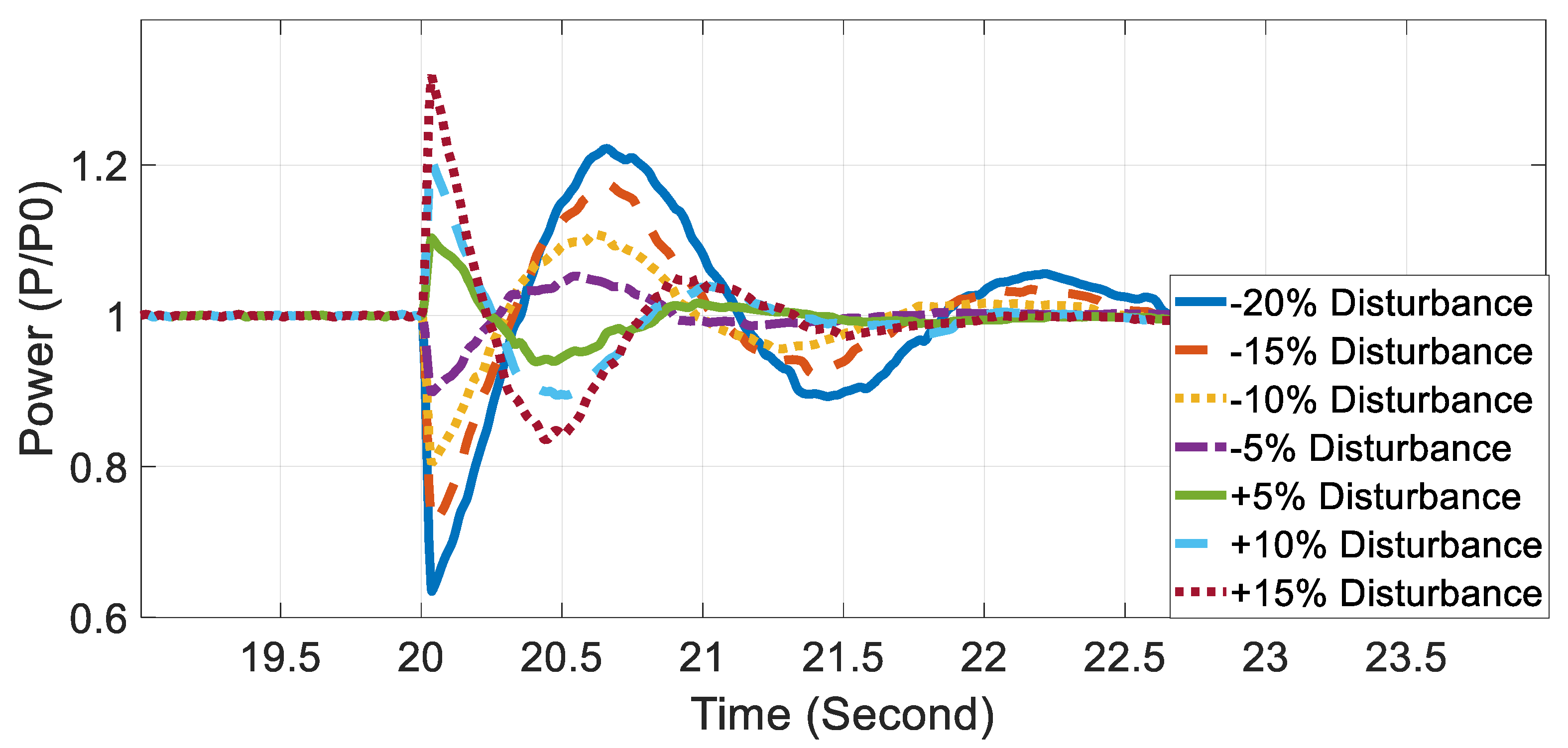
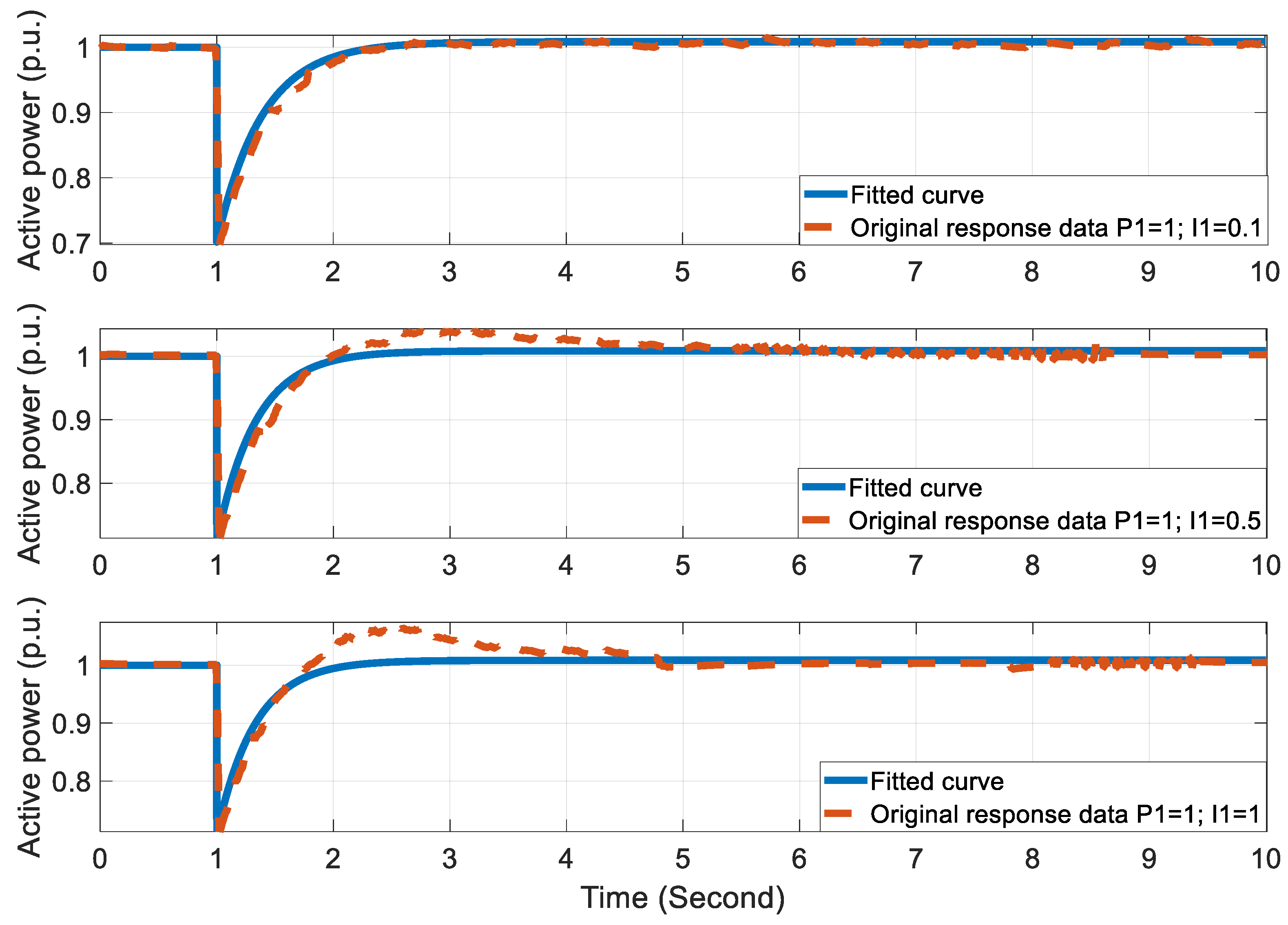
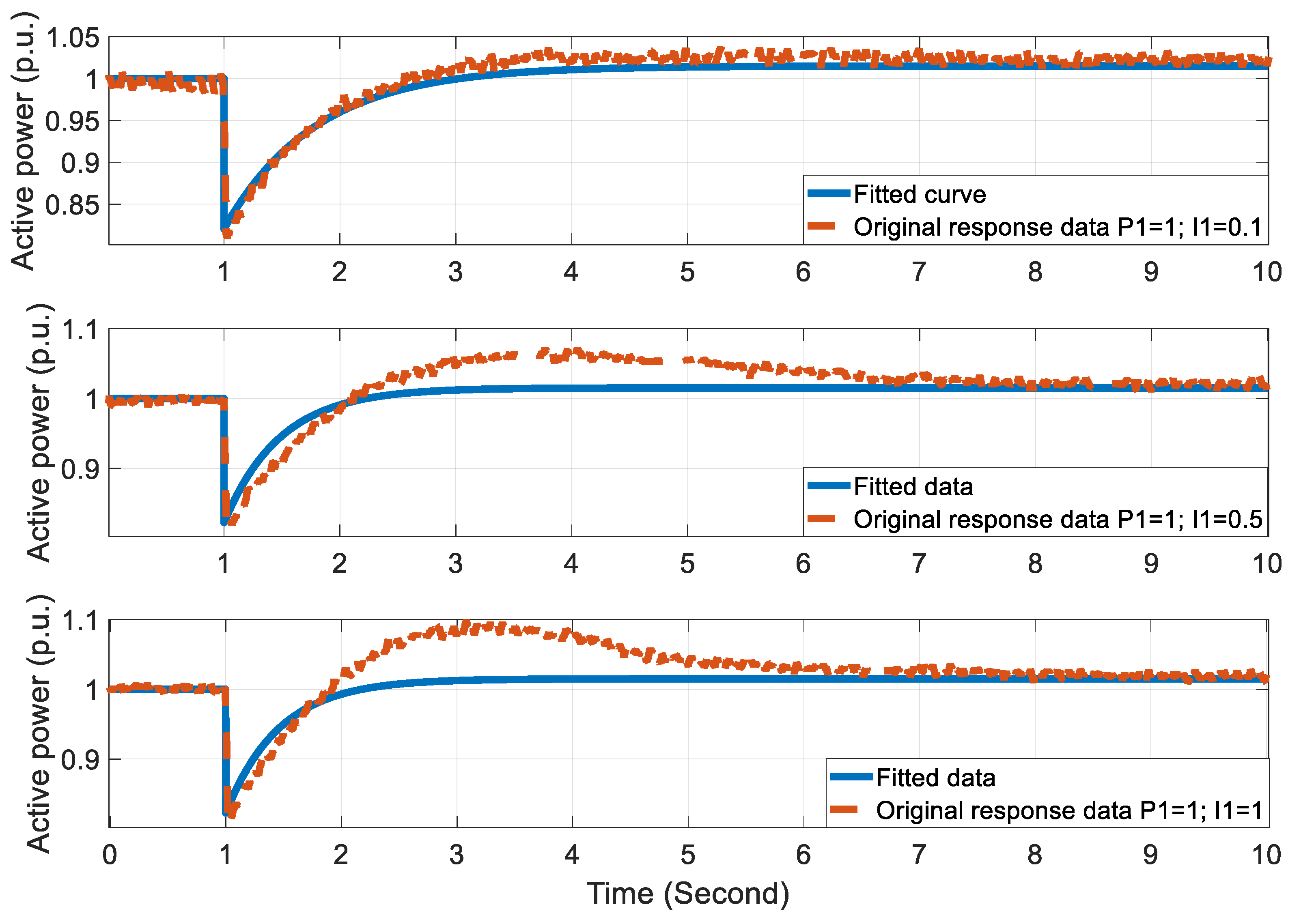
4.3. Dynamic Load Model and Control Parameter Sensitivity for Charging Approach A
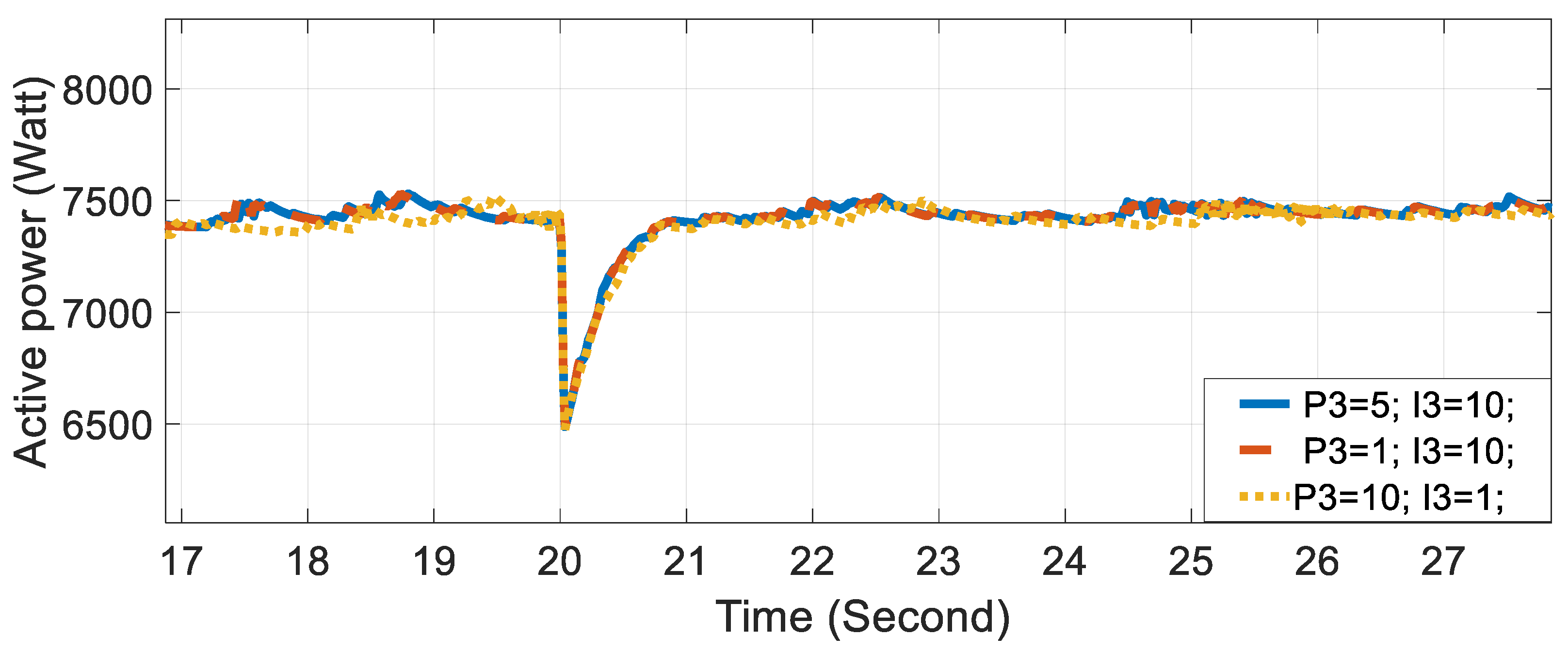
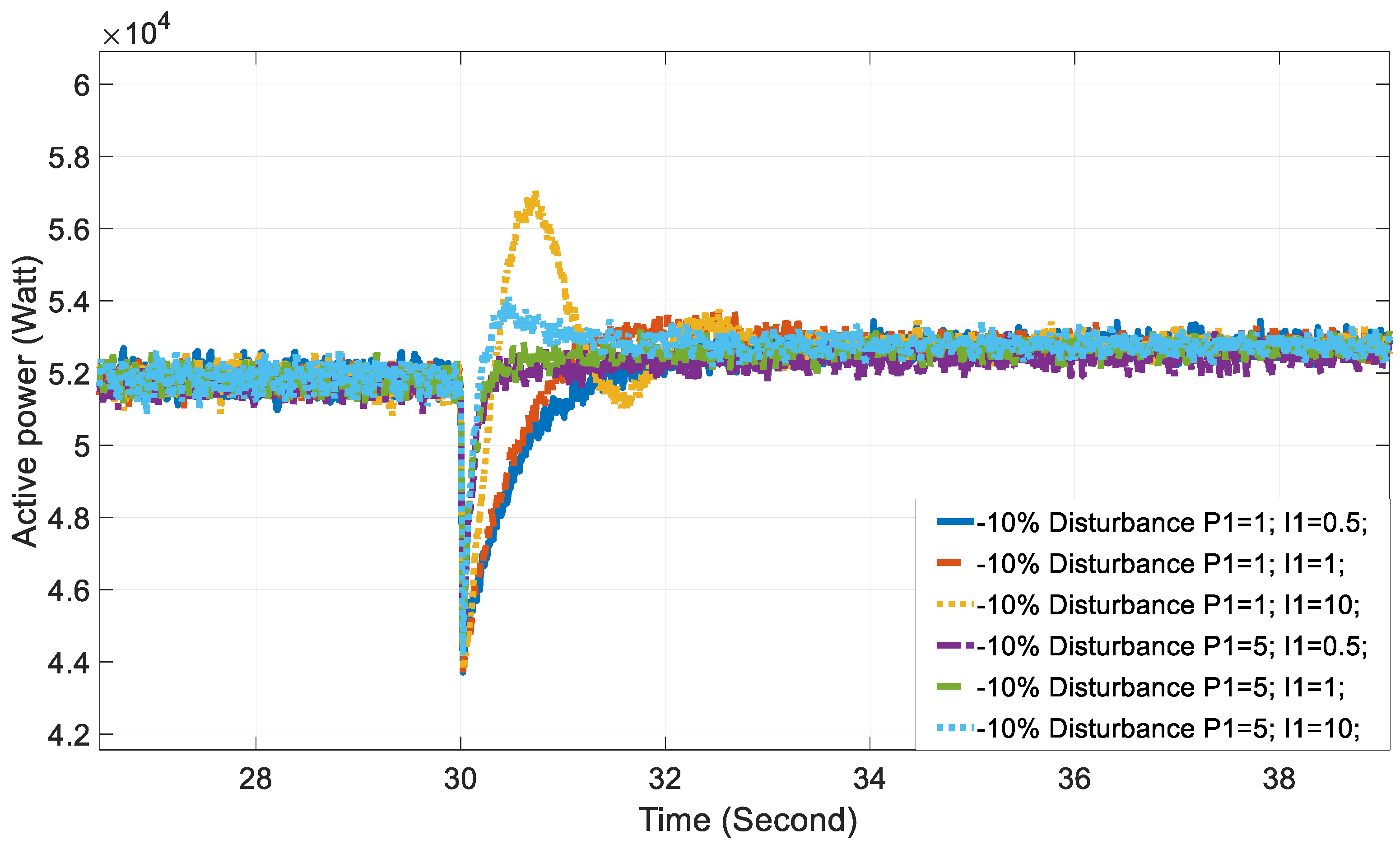
4.4. Dynamic Load Model Parameter for Charging Approach B
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bunsen, T.; Cazzola, P.; d’Amore, L.; Gorner, M.; Scheffer, S.; Schuitmaker, R.; Signollet, H.; Tattini, J.; Teter, J. Leonardo Paoli. IEA Technology Report, Global EV Outlook 2019 Scaling up the Transition to Electric Mobility; International Energy Agency: Paris, France, 2019.
- Arias-Londoño, A.; Montoya, O.D.; Grisales-Noreña, L.F.A. Chronological Literature Review of Electric Vehicle Interactions with Power Distribution Systems. Energies 2020, 13, 3016. [Google Scholar] [CrossRef]
- Chen, T.; Zhang, X.; Wang, J. A Review on Electric Vehicle Charging Infrastructure Development in the UK. J. Mod. Power Syst. Clean Energy 2020, 8, 193–205. [Google Scholar] [CrossRef]
- ICF Consulting Services. Overview of Electric Vehicle Market. and the Potential of Points for Demand Response; ICF Consulting Service: Fairfax, VA, USA, 2016; pp. 1–32. [Google Scholar]
- Lopes, J.A.P.; Soares, F.J.; Almeida, P.M.R. Integration of Electric Vehicles in the Electric Power System. IEEE 2011, 99, 168–183. [Google Scholar] [CrossRef]
- Garcia-Valle, R.; Lopes, J.A.P. Electric Vehicle Integration into Modern Power Networks; Springer Science & Business Media: New York, NY, USA, 2013; Volume 4, pp. 87–107, 155–203. [Google Scholar] [CrossRef]
- Chung, Y. Electric Vehicle—Smart Grid Integration Load Modeling, Scheduling and Cyber Security. Ph.D. Thesis, University of California, Los Angeles, CA, USA, 2020. [Google Scholar]
- Collin, A.J. Advanced Load Modelling for Power System Studies. Ph.D. Thesis, University of Edinburgh, Edinburgh, UK, November 2013. [Google Scholar]
- Xiao, X.; Molin, H.; Kourtza, P. Component-based modelling of EV battery chargers. In Proceedings of the 2015 IEEE Eindhoven PowerTech, Eindhoven, The Netherlands, 29 June–2 July 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Dharmakeerthi, C.H.; Mithulananthan, N.; Saha, T.K. Impact of electric vehicle fast charging on power system voltage stability. Int. J. Electr. Power Energy Syst. 2014, 57, 241–249. [Google Scholar] [CrossRef]
- Singh, B.; Singh, B.N.; Chandra, A.; Al-Haddad, K.; Pandey, A.; Kothari, D.P. A Review of single-phase Improved power quality AC-DC converters. IEEE Trans. Ind. Electron. 2003, 50, 962–981. [Google Scholar] [CrossRef]
- Qian, K.; Zhou, C.; Allan, M.; Yuan, Y. Modelling of load demand Due to EV Battery Charging in distribution systems. IEEE Trans. Power Syst. 2011, 26, 802–810. [Google Scholar] [CrossRef]
- Yilmaz, M.; Krein, P.T. Review of charging power levels and infrastructure for plug-in electric and hybrid vehicles. In Proceedings of the 2012 IEEE International Electric Vehicle Conference, Greenville, SC, USA, 4–8 March 2012; Volume 28, pp. 2151–2169. [Google Scholar] [CrossRef]
- Lin, B.-R.; Hung, T.L.; Huang, C.-H. Bi-directional single-phase half-bridge rectifier for power quality compensation. Electr. Power Appl. IEE Proc. 2003, 150, 397–406. [Google Scholar] [CrossRef]
- Kempton, W.; Tomic, J. Vehicle-to-grid power fundamentals: Calculating capacity and net revenue. J. Power Sources 2005, 144, 268–279. [Google Scholar] [CrossRef]
- Kisacikoglu, M.C.; Ozpineci, B.; Tolbert, L.M. EV/PHEV bidirectional charger assessment for V2G reactive power operation. IEEE Trans. Power Electron. 2013, 28, 5717–5727. [Google Scholar] [CrossRef]
- Tremblay, O.; Dessaint, L.A. Experimental Validation of a Battery Dynamic Model for EV applications. World Electr. Veh. J. 2009, 3, 289–298. [Google Scholar] [CrossRef]
- Bohn, S.; Agsten, M.; Dubey, A.; Santoso, S. A comparative analysis of PEV charging impacts an international perspective. In SAE Technical Paper; SAE: Detroit, MI, USA, 2015. [Google Scholar] [CrossRef]
- Khan, W.; Ahmad, A.; Ahmad, F. A comprehensive review of fast charging infrastructure for electric vehicles. Smart Sci. 2018, 6, 256–270. [Google Scholar] [CrossRef]
- J2954-202010, Ground Vehicle Standard, Wireless Power Transfer for Light-Duty Plug-in/Electric Vehicle and Alignment Methodology; SAE Standard: Warrendale, PA, USA, 2020.
- Elmhirst, O.; Wagstaff, D.; Grid, N. Forecourt Thoughts: Mass Fast Charging of Electric Vehicles. Bloomberg European Automakers Charge into EV Infrastructure. 2017. Available online: https://global.abb/?aspxerrorpath=/ContentPage.aspx (accessed on 23 March 2021).
- IEC 62196-3: 2014. Plugs, socket-outlets. In Vehicle Connectors and Vehicle Inlets—Conductive Charging of Electric Vehicles; International Electrotechnical Commission: Geneva, Switzerland, 2014.
- Kontis, E.O.; Chrysochos, A.I.; Papagiannis, G.K.; Papadopoulos, T.A. Development of measurement-based generic load models for dynamic simulations. In Proceedings of the 2015 IEEE Eindhoven PowerTech, Eindhoven, The Netherlands, 29 June–2 July 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Karlsson, D.; Hill, D.J. Modeling and identification of nonlinear dynamic loads in power systems. IEEE Trans. Power Syst. 1994, 9, 157–166. [Google Scholar] [CrossRef]
- Stojanović, D.P.; Korunović, L.M.; Milanović, J.V. Dynamic load modelling based on measurements in medium voltage distribution network. Electr. Power Syst. Res. 2008, 78, 228–238. [Google Scholar] [CrossRef]
- Kundur, P. Power system load. In Power System Stability and Control; Balu, N.J., Lauby, M.G., Eds.; McGraw-Hill: New York, NY, USA, 1994; pp. 271–312. [Google Scholar]
- Korunović, L.M.; Milanović, J.V.; Djokic, S.Z.; Yamashita, K.; Villanueva, S.M.; Sterpu, S. Recommended Parameter Values and Ranges of Most Frequently Used Static Load Models. IEEE Trans. Power Syst. 2018, 33, 5923–5934. [Google Scholar] [CrossRef]
- Bokhari, A.; Alkan, A.; Dogan, R. Experimental determination of the ZIP coefficients for modern residential, commercial, and industrial loads. IEEE Trans. Power Deliv. 2013, 29, 1372–1381. [Google Scholar] [CrossRef]
- Hill, D.J.; Hiskens, I.A. Dynamic analysis of voltage collapse in power systems. In Proceedings of the 31st IEEE Conference on Decision and Control, Tucson, AZ, USA, 16–18 December 1992; pp. 2904–2909. [Google Scholar]
- Musavi, F.; Edington, M.; Eberle, W.; Dunford, W.G. Evaluation and Efficiency Comparison of Front End AC-DC Plug-in Hybrid Charger Topologies. IEEE Trans. Smart Grid 2012, 3, 413–421. [Google Scholar] [CrossRef]
- Kim, J.-S.; Choe, G.-Y.; Jung, H.-M.; Lee, B.-K.; Cho, Y.-J.; Han, K.-B. Design and implementation of a high-efficiency on-board battery charger for electric vehicles with frequency control strategy. In Proceedings of the 2010 IEEE Vehicle Power and Propulsion Conference, Lille, France, 1–3 September 2010; pp. 1–6. [Google Scholar] [CrossRef]
- Restrepo, M.; Morris, J.; Kazerani, M.; Cañizares, C.A. Modelling and testing of a bidirectional smart charger for distribution system EV integration. IEEE Trans. Smart Grid 2016, 9, 152–162. [Google Scholar] [CrossRef]
- ABB Terra CE53–JCG. Available online: https://new.abb.com/products/4EPY410071R1/terrace53-cjg-terra-50-kw-charger-ccs-chademo-ac-cable-ce (accessed on 23 March 2021).
- Delta Electronics, Inc. Delta EV DC Quick Charger for EU. Available online: https://chademo.com/portfolios/delta-electronics1-2/ (accessed on 23 March 2021).
- Collin, A.; Djokic, S.; Thomas, H.; Meyer, J. Modelling of electric vehicle chargers for power system analysis. In Proceedings of the 11th International Conference on Electrical Power Quality and Utilisation, Lisbon, Portugal, 17–19 October 2011; pp. 1–6. [Google Scholar] [CrossRef]
- Lee, C.S.; Jeong, J.B.; Lee, B.H.; Hur, J. Study on 1.5 kW battery chargers for neighborhood electric vehicles. In Proceedings of the 2011 IEEE Vehicle Power and Propulsion Conference, Chicago, IL, USA, 6–9 September 2011; pp. 1–4. [Google Scholar] [CrossRef]
- Horton, R.; Taylor, J.A.; Maitra, A.; Halliwell, J. A time-domain model of a plug-in electric vehicle battery charger. In Proceedings of the 2012 PES T & D, Orlando, FL, USA, 7–10 May 2012; pp. 1–5. [Google Scholar] [CrossRef]
- Abdelhamid, E.; Abdelsalam, A.K.; Massoud, A.; Ahamed, S. An enhanced performance IPT based battery charger for electric vehicles application. In Proceedings of the 2014 IEEE 23rd International Symposium on Industrial Electronics (ISIE), Istanbul, Turkey, 1–4 June 2014; pp. 1610–1615. [Google Scholar] [CrossRef]
- Tong, S.; Klein, M.P.; Park, J.W. On-line optimization of battery open circuit voltage for improved state-of-charge and state-of-health estimation. J. Power Sources 2015, 293, 416–428. [Google Scholar] [CrossRef]
- Marra, F.; Yang, G.Y.; Træholt, C.; Larsen, E.; Rasmussen, C.N.; You, S. Demand profile study of battery electric vehicle under different charging options. In Proceedings of the 2012 IEEE Power and Energy Society General Meeting, San Diego, CA, USA, 22–26 July 2012; pp. 1–7. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| EV Charge Static Load Model Parameters | ||||
|---|---|---|---|---|
| Charging Type | Exponential Parameter | Parameter Z | Parameter I | Parameter P |
| Approach A | −0.0519 | 0.0034 | −0.1199 | 1.086 |
| Approach B | −0.0921 | 0.0620 | −0.2199 | 1.156 |
| EV Charge Approach B | ||||
|---|---|---|---|---|
| Parameter Type | Exponential Parameter | Parameter Z | Parameter I | Parameter P |
| = 420 V | −0.0921 | 0.0620 | −0.2199 | 1.156 |
| = 440 V | −0.0764 | 0.0440 | −0.1651 | 1.12 |
| = 460 V | −0.0683 | −0.1440 | 0.2180 | 0.9283 |
| = 480 V | −0.0821 | −0.1326 | 0.1816 | 0.9495 |
| PI Parameters | R-Squared | NRMSE | |||
|---|---|---|---|---|---|
| −0.0519 | 2.245 | −0.390 | 0.9857 | 0.0211 | |
| −0.0519 | 2.163 | −0.337 | 0.9130 | 0.0520 | |
| −0.0519 | 2.176 | −0.327 | 0.8258 | 0.0680 |
| PI Parameters | R-Squared | NRMSE | |||
|---|---|---|---|---|---|
| −0.0921 | 1.312 | −0.792 | 0.9921 | 0.0118 | |
| −0.0921 | 1.236 | −0.483 | 0.9661 | 0.0435 | |
| −0.0921 | 1.132 | −0.461 | 0.5689 | 0.1024 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tian, H.; Tzelepis, D.; Papadopoulos, P.N. Electric Vehicle Charger Static and Dynamic Modelling for Power System Studies. Energies 2021, 14, 1801. https://doi.org/10.3390/en14071801
Tian H, Tzelepis D, Papadopoulos PN. Electric Vehicle Charger Static and Dynamic Modelling for Power System Studies. Energies. 2021; 14(7):1801. https://doi.org/10.3390/en14071801
Chicago/Turabian StyleTian, Hengqing, Dimitrios Tzelepis, and Panagiotis N. Papadopoulos. 2021. "Electric Vehicle Charger Static and Dynamic Modelling for Power System Studies" Energies 14, no. 7: 1801. https://doi.org/10.3390/en14071801
APA StyleTian, H., Tzelepis, D., & Papadopoulos, P. N. (2021). Electric Vehicle Charger Static and Dynamic Modelling for Power System Studies. Energies, 14(7), 1801. https://doi.org/10.3390/en14071801