
Adaptive Smooth Variable Structure Filter Strategy for State Estimation of Electric Vehicle Batteries



Abstract
:1. Introduction
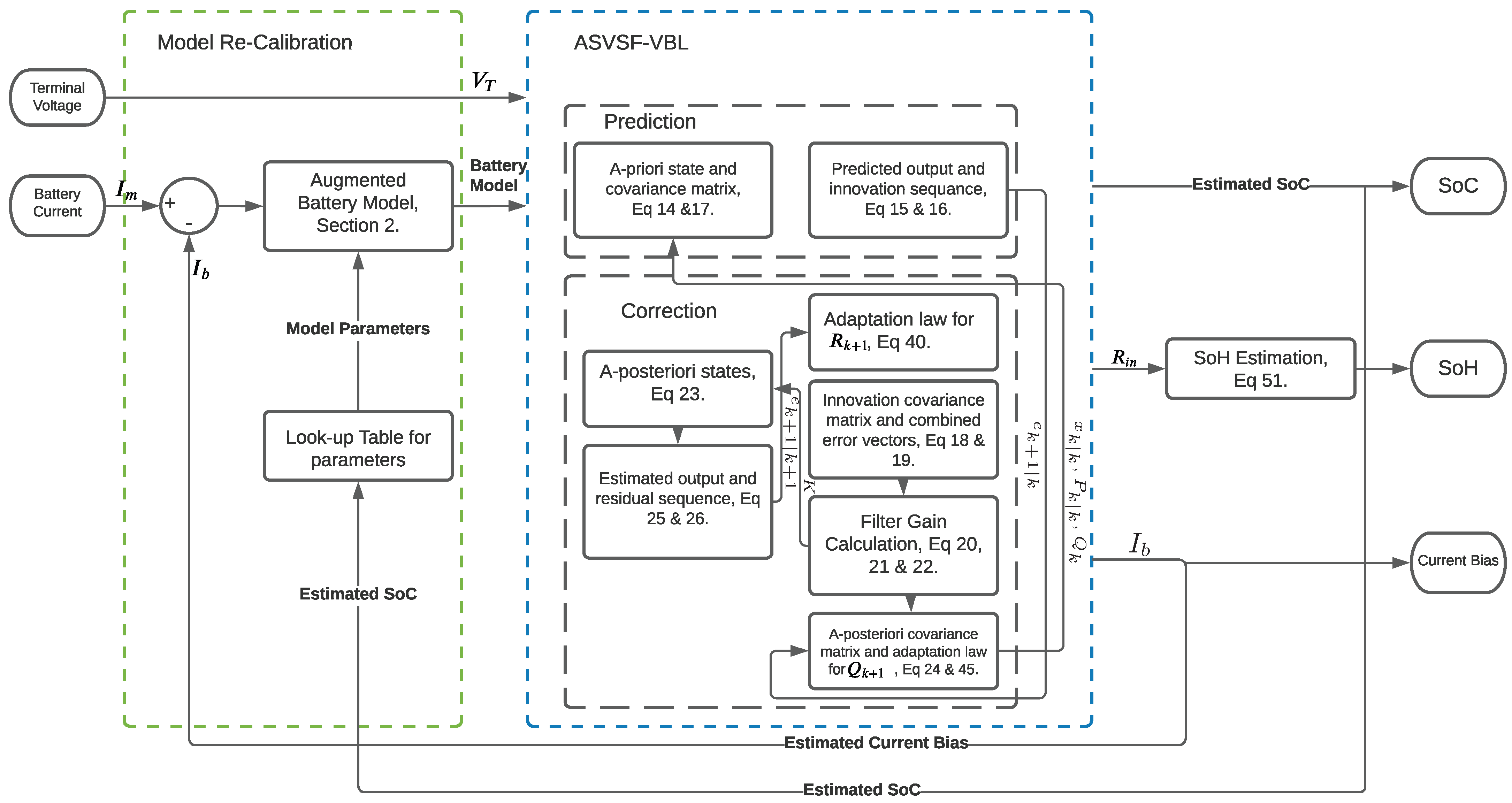
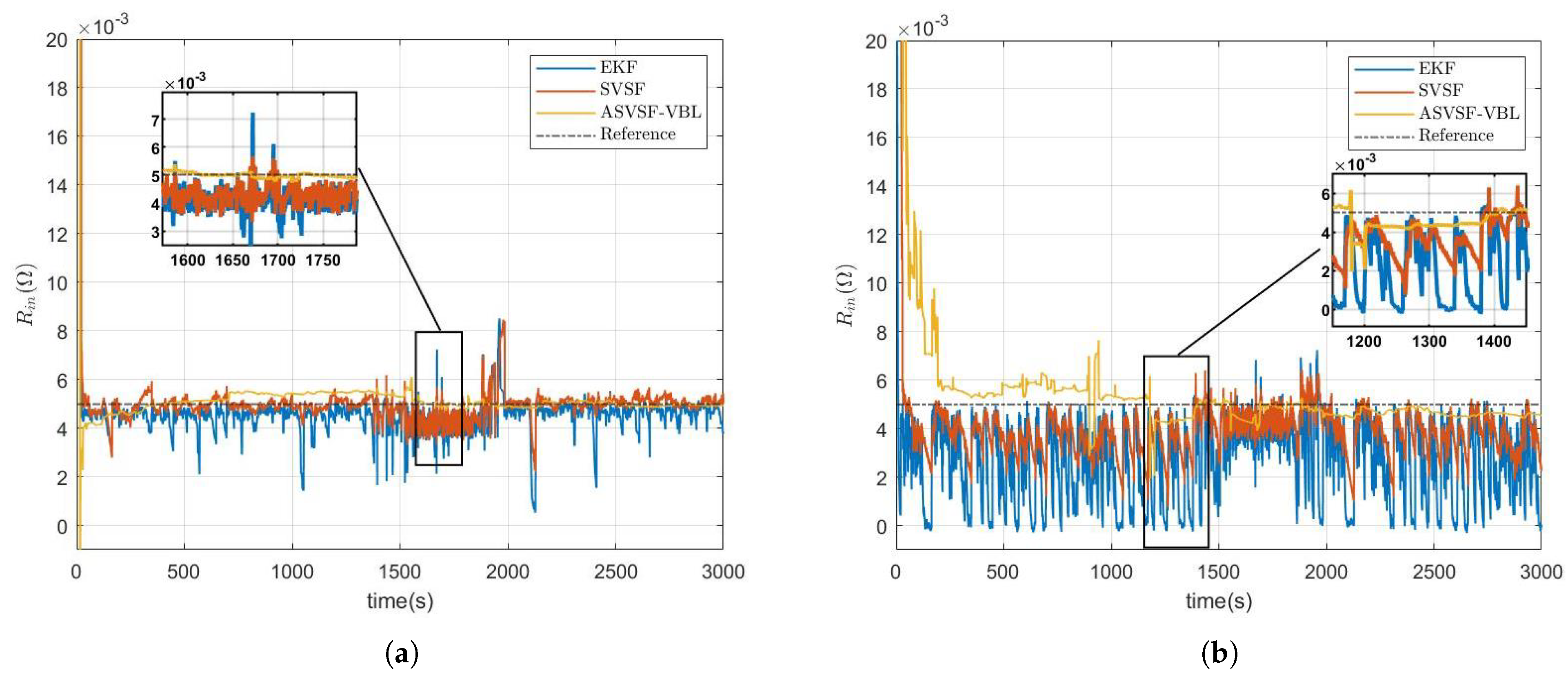
- An equivalent circuit model formulation augmented with internal resistance and sensor bias is used as the model. The estimated internal resistance is employed as an indicator of SoH while the estimated bias is to improve estimation accuracy.
- The Adaptive Smooth Variable Structure Filter with Variable Boundary Layer (ASVSF-VBL) strategy is introduced for state estimation (SoC and SoH) in presence of changing statics of noise and uncertainties. The proposed strategy provides noise adaptation which improves estimation robustness and accuracy.
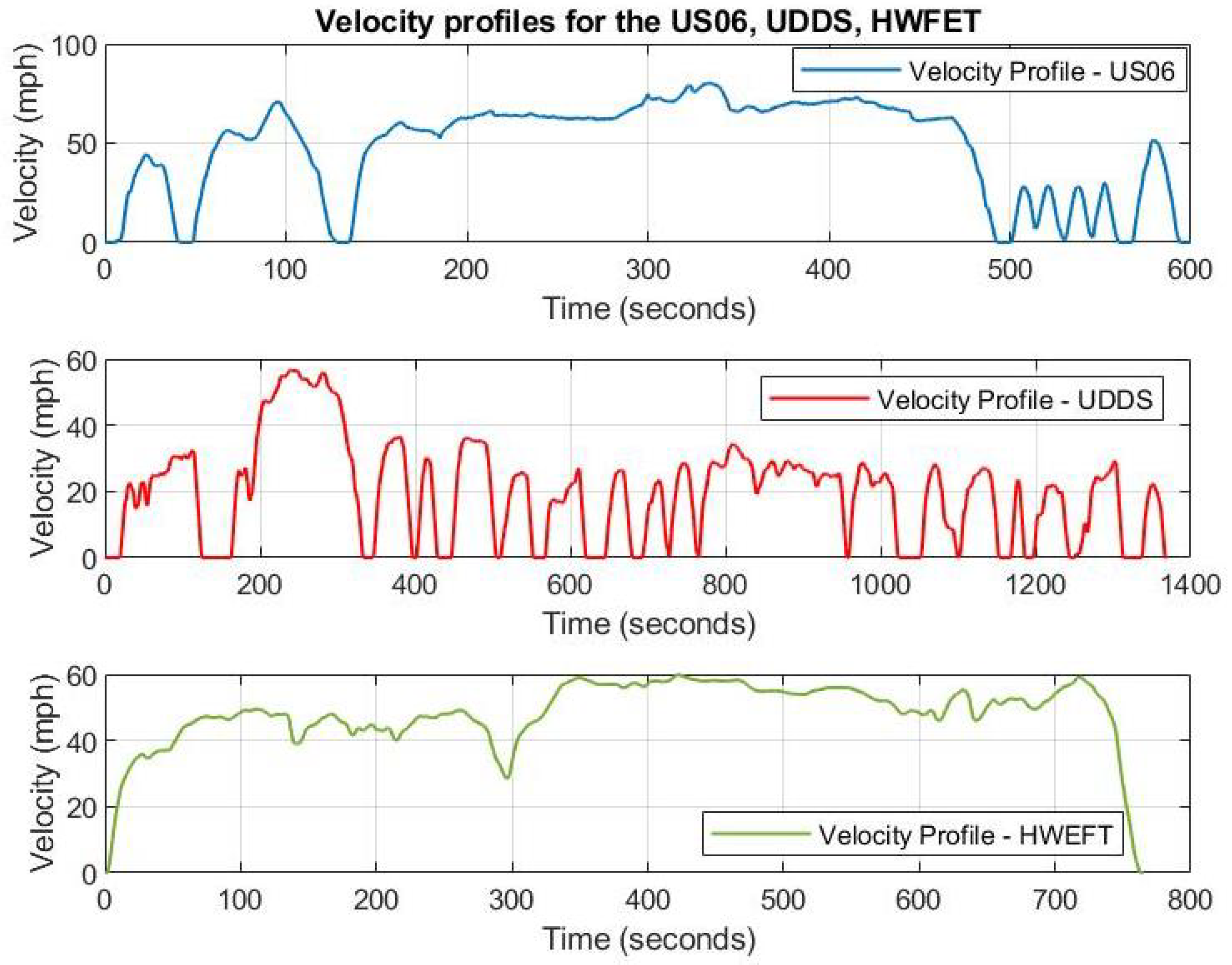
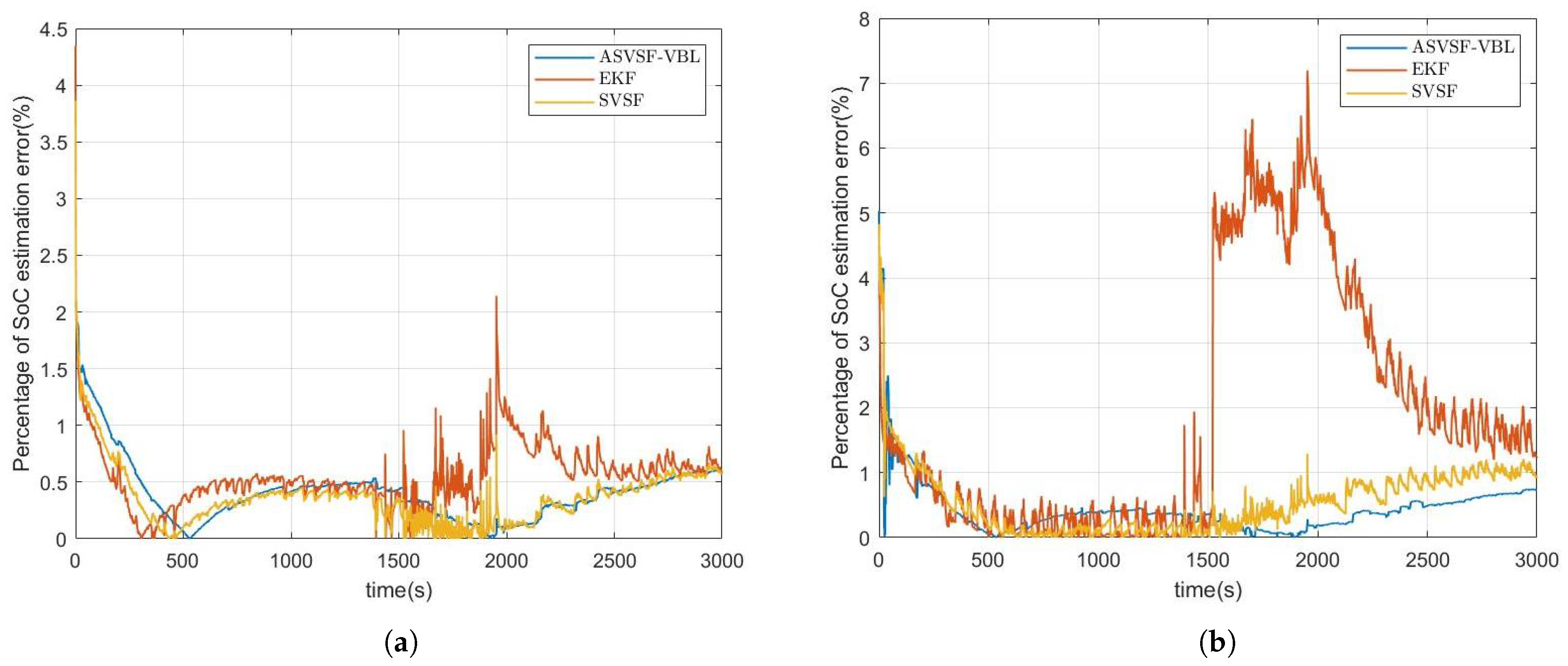
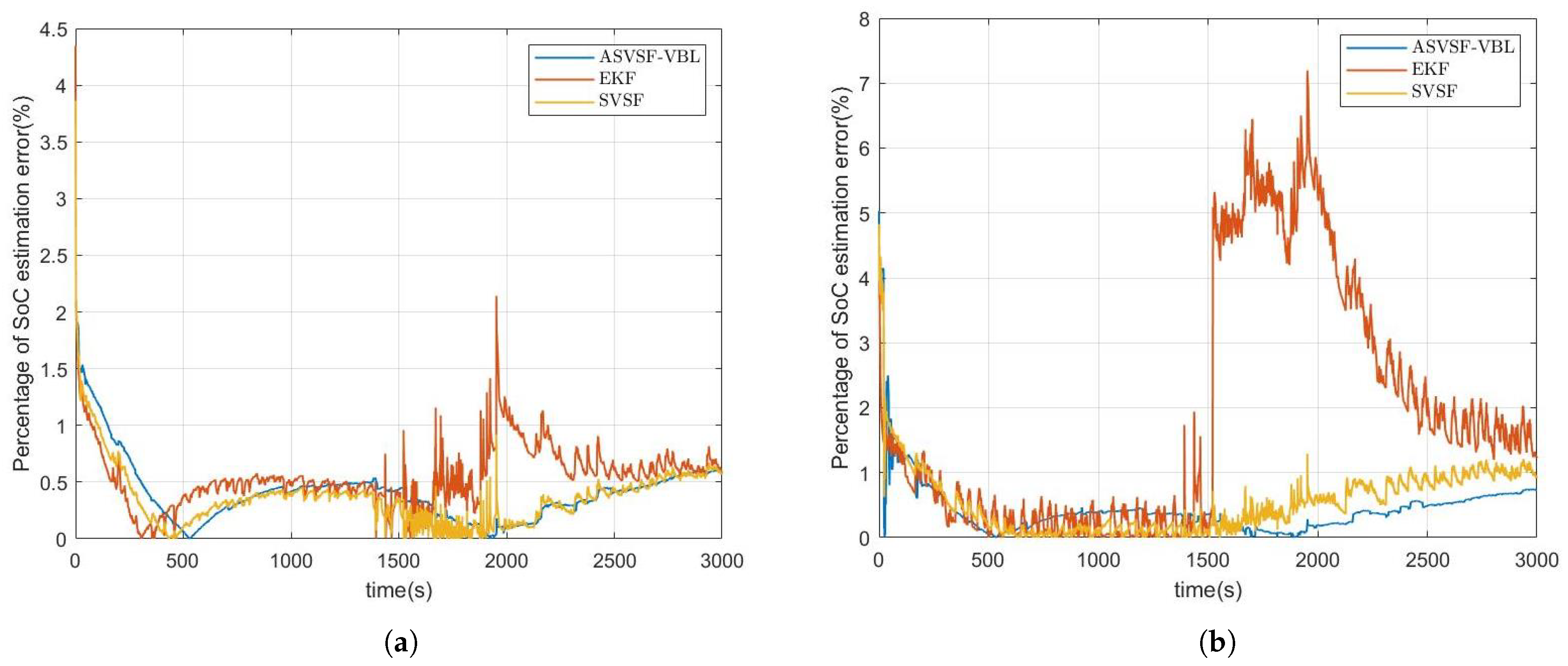
- The performance of the ASVSF-VBL is then compared to conventional SVSF-VBL and EKF using experimental data.
2. Modeling
3. Adaptive Smooth Variable Structure Filter with Variable Boundary Layer
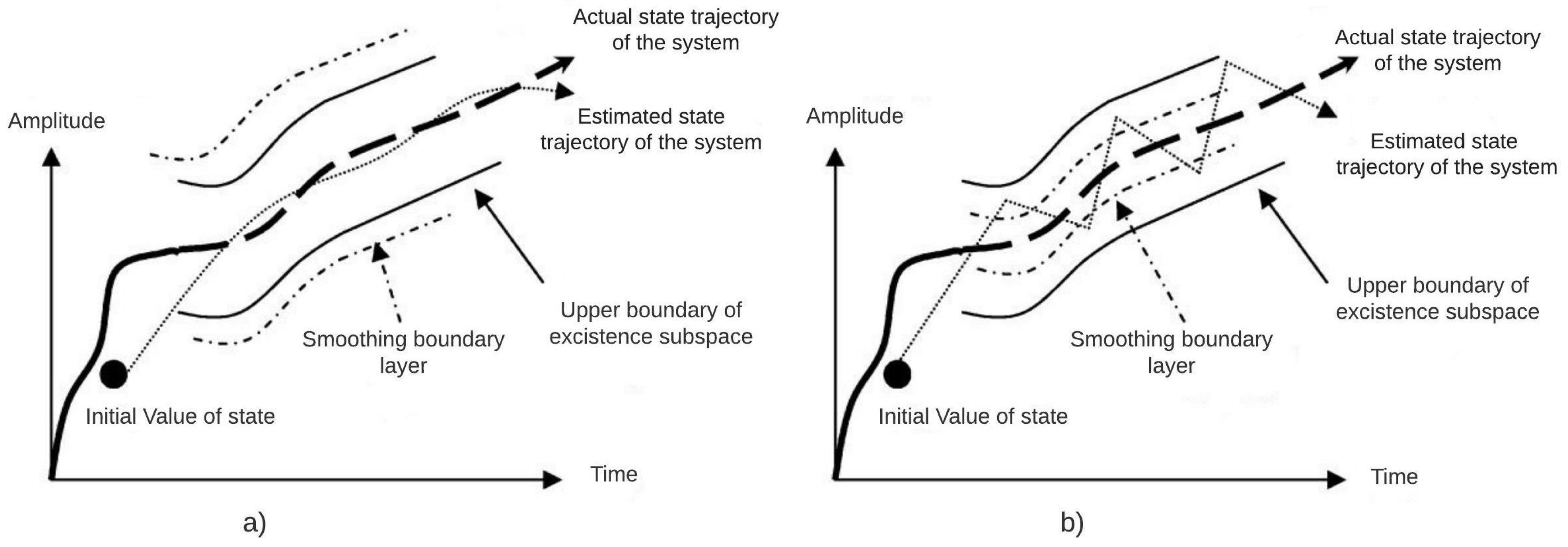
3.1. Smooth Variable Structure Filter with Variable Boundary Layer
- Prediction: An estimated filter model is used to obtain the a-priori state estimates.where P is the state vector covariance matrix, H is the jacobian matrix of H, and is called the filter innovation measurement sequence.
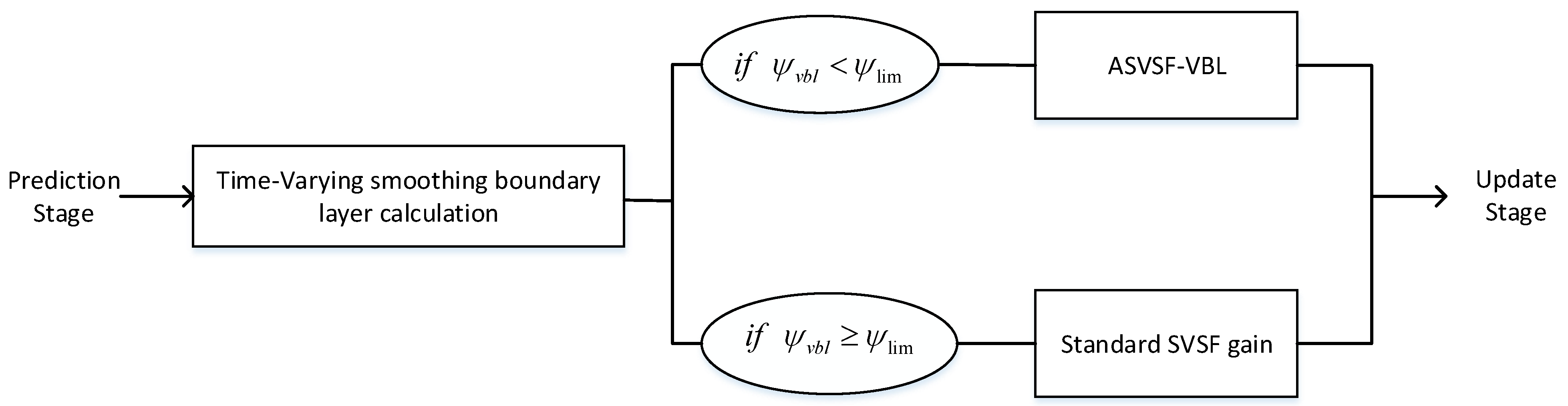
- Correction: The correction gain is obtained and, the estimated states are then updated from their a-priori into their a-posteriori by using this gain.where S is the innovation covariance matrix, E is the combination of measurement error vector, is the SVSF convergence parameter and is the SVSF smoothing boundary layer width.The SVSF is a predictor-corrector method and its gain is employed to update the a-priori estimated states. The gain is as follows,where is upper limit for the boundary layer. For the case when the SVSF gain is:Finally, the a posteriori parameters are calculated as:where is called the filter measurement residual sequence. Equations (14) to (26) summarize the SVSF-VBL strategy.
3.2. Noise Adaptation for Smooth Variable Structure Filter
- The states are independent of the adaptive parameters.
- The system and measurement matrices are time variant within a piece-wise limit and independent of adaptive parameters.
- The innovation sequence is white and ergodic within the estimation window.
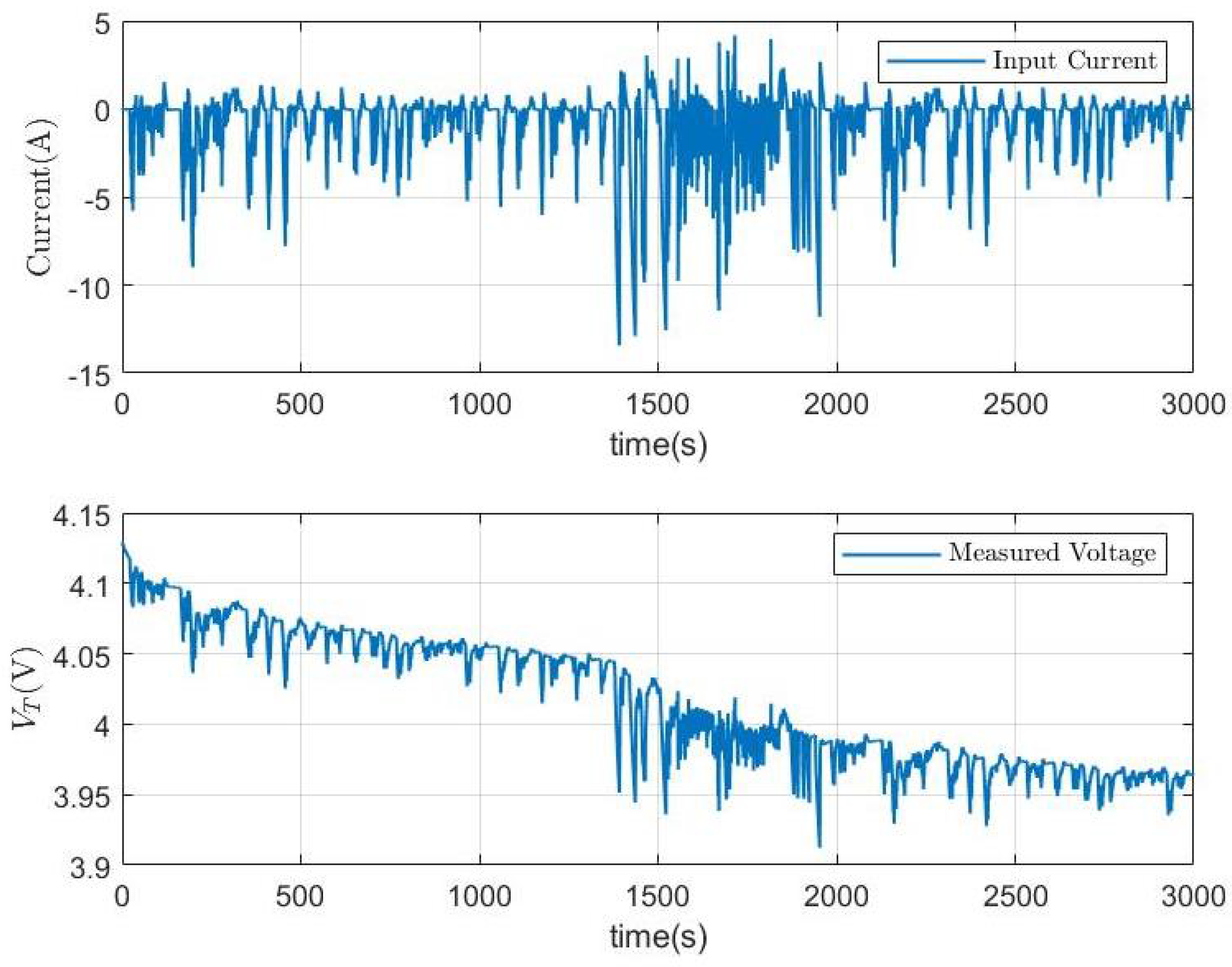
4. Experimental Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
List of Notations
| Cell terminal voltage. | |
| Voltage across branch, . | |
| Open circuit voltage (nonlinear function of SoC). | |
| SoC | State of Charge. |
| SoH | State of Health. |
| SoP | State of Power. |
| Cell nominal capacity. | |
| Cell internal resistance. | |
| Resistance of branch, . | |
| Capacitor of branch, . | |
| Cell Coulombic Efficiency. | |
| Sampling period. | |
| k | Time sample. |
| i | Actual current flowing across the cell. |
| Measured current flowing across the cell. | |
| Bias from the current sensor. | |
| x | State vector or values. |
| u | Input to the system. |
| y | Measurement vector or values. |
| f | Nonlinear system function. |
| g | Input gain function. |
| h | Nonlinear measurement function. |
| X | An open subset of . |
| A | State matrix. |
| B | Input matrix. |
| w | System noise vector. |
| Measurement noise vector. | |
| A-priori time step (i.e., before applied gain). | |
| A-posteriori time step (i.e., after update). | |
| Q | System noise covariance matrix. |
| R | Measurement noise covariance matrix. |
| Diag(a) or | diagonal matrix of some vector a. |
| SVSF “convergence” or memory parameter. | |
| SVSF smoothing boundary layer width. | |
| K | SVSF gain matrix. |
| P | State error covariance matrix. |
| Estimated vector or values. | |
| S | Innovation covariance matrix. |
| Absolute value of some vector a. | |
| T | Transpose of some vector or matrix. |
| e | Measurement (output) error vector. |
| E | Combination of measurement error vectors. |
| Defines a saturation of the term a. | |
| H | Jacobian matrix of h. |
| m | Number of measurements. |
| n | Number of states. |
| Defines a natural logarithm of a. | |
| Probability density function of z conditioned to a. | |
| Adaptive parameter. | |
| Trace of matrix A. | |
| Forgetting factor of estimated measurement noise covariance. | |
| Forgetting factor of estimated system noise covariance. | |
| Innovation Sequence. | |
| Residual Sequence. | |
| Identity matrix (). | |
| Zero matrix (). | |
| V | Lyapunov function. |
References
- Ahmed, R.; El Sayed, M.; Arasaratnam, I.; Tjong, J.; Habibi, S. Reduced-order electrochemical model parameters identification and soc estimation for healthy and aged li-ion batteries part i: Parameterization model development for healthy batteries. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 659–677. [Google Scholar] [CrossRef]
- Wang, Y.; Tian, J.; Sun, Z.; Wang, L.; Xu, R.; Li, M.; Chen, Z. A comprehensive review of battery modeling and state estimation approaches for advanced battery management systems. Renew. Sustain. Energy Rev. 2020, 131, 110015. [Google Scholar] [CrossRef]
- Park, S.; Ahn, J.; Kang, T.; Park, S.; Kim, Y.; Cho, I.; Kim, J. Review of state-of-the-art battery state estimation technologies for battery management systems of stationary energy storage systems. J. Power Electron. 2020, 20, 1526–1540. [Google Scholar] [CrossRef]
- Ahmed, R.; Sayed, M.E.; Arasaratnam, I.; Tjong, J.; Habibi, S. Reduced-Order Electrochemical Model Parameters Identification and State of Charge Estimation for Healthy and Aged Li-Ion Batteries—Part II: Aged Battery Model and State of Charge Estimation. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 678–690. [Google Scholar] [CrossRef]
- Baccouche, I.; Jemmali, S.; Mlayah, A.; Manai, B.; Amara, N.E.B. Implementation of an Improved Coulomb-Counting Algorithm Based on a Piecewise SOC-OCV Relationship for SOC Estimation of Li-IonBattery. arXiv 2018, arXiv:1803.10654. [Google Scholar]
- Movassagh, K.; Raihan, A.; Balasingam, B.; Pattipati, K. A critical look at Coulomb counting approach for state of charge estimation in batteries. Energies 2021, 14, 4074. [Google Scholar] [CrossRef]
- Wei, Z.; Zhao, J.; He, H.; Ding, G.; Cui, H.; Liu, L. Future smart battery and management: Advanced sensing from external to embedded multi-dimensional measurement. J. Power Sources 2021, 489, 229462. [Google Scholar] [CrossRef]
- Plett, G. Extended Kalman filtering for battery management systems of LiPB-based HEV battery packs-Part 1. Background. J. Power Sources 2004, 134, 252–261. [Google Scholar] [CrossRef]
- Piller, S.; Perrin, M.; Jossen, A. Methods for state-of-charge determination and their applications. J. Power Sources 2001, 96, 113–120. [Google Scholar] [CrossRef]
- Samadani, S.E.; Fraser, R.A.; Fowler, M. A Review Study of Methods for Lithium-Ion Battery Health Monitoring and Remaining Life Estimation in Hybrid Electric Vehicles; Technical Report, SAE Technical Paper; SAE International: Warrendale, PA, USA, 2012; Available online: https://www.sae.org/publications/technical-papers/content/2012-01-0125/ (accessed on 10 October 2021).
- Berecibar, M.; Gandiaga, I.; Villarreal, I.; Omar, N.; Van Mierlo, J.; Van den Bossche, P. Critical review of state of health estimation methods of Li-ion batteries for real applications. Renew. Sustain. Energy Rev. 2016, 56, 572–587. [Google Scholar] [CrossRef]
- Waag, W.; Fleischer, C.; Sauer, D.U. Critical review of the methods for monitoring of lithium-ion batteries in electric and hybrid vehicles. J. Power Sources 2014, 258, 321–339. [Google Scholar] [CrossRef]
- Lin, X.; Perez, H.E.; Siegel, J.B.; Stefanopoulou, A.G. Robust estimation of battery system temperature distribution under sparse sensing and uncertainty. IEEE Trans. Control Syst. Technol. 2019, 28, 753–765. [Google Scholar] [CrossRef]
- Wei, Z.; Zhao, J.; Xiong, R.; Dong, G.; Pou, J.; Tseng, K.J. Online estimation of power capacity with noise effect attenuation for lithium-ion battery. IEEE Trans. Ind. Electron. 2018, 66, 5724–5735. [Google Scholar] [CrossRef]
- Rahimifard, S.; Ahmed, R.; Habibi, S. Interacting Multiple Model Strategy for Electric Vehicle Batteries State of Charge/Health/ Power Estimation. IEEE Access 2021, 9, 109875–109888. [Google Scholar] [CrossRef]
- Messing, M.; Rahimifard, S.; Shoa, T.; Habibi, S. Low Temperature, Current Dependent Battery State Estimation Using Interacting Multiple Model Strategy. IEEE Access 2021, 9, 99876–99889. [Google Scholar] [CrossRef]
- Lin, X. Theoretical analysis of battery SOC estimation errors under sensor bias and variance. IEEE Trans. Ind. Electron. 2018, 65, 7138–7148. [Google Scholar] [CrossRef]
- Smiley, A.; Plett, G.L. An adaptive physics-based reduced-order model of an aged lithium-ion cell, selected using an interacting multiple-model Kalman filter. J. Energy Storage 2018, 19, 120–134. [Google Scholar] [CrossRef]
- Farag, M.; Fleckenstein, M.; Habibi, S. Continuous piecewise-linear, reduced-order electrochemical model for lithium-ion batteries in real-time applications. J. Power Sources 2017, 342, 351–362. [Google Scholar] [CrossRef]
- Bar-Shalom, Y.; Li, X.R.; Kirubarajan, T. Estimation with Applications to Tracking and Navigation: Theory Algorithms and Software; John Wiley & Sons: New York, NY, USA, 2004. [Google Scholar]
- Afshari, H.H.; Gadsden, S.A.; Habibi, S. Gaussian filters for parameter and state estimation: A general review of theory and recent trends. Signal Process. 2017, 135, 218–238. [Google Scholar] [CrossRef]
- Arasaratnam, I.; Haykin, S. Cubature kalman filters. IEEE Trans. Autom. Control 2009, 54, 1254–1269. [Google Scholar] [CrossRef] [Green Version]
- He, Y.; Liu, X.; Zhang, C.; Chen, Z. A new model for State-of-Charge (SOC) estimation for high-power Li-ion batteries. Appl. Energy 2013, 101, 808–814. [Google Scholar] [CrossRef]
- Farag, M.S.; Ahmed, R.; Gadsden, S.; Habibi, S.; Tjong, J. A comparative study of Li-ion battery models and nonlinear dual estimation strategies. In Proceedings of the 2012 IEEE Transportation Electrification Conference and Expo (ITEC), Dearborn, MI, USA, 18–20 June 2012; pp. 1–8. [Google Scholar]
- Wang, W.; Wang, D.; Wang, X.; Li, T.; Ahmed, R.; Habibi, S.; Emadi, A. Comparison of kalman filter-based state of charge estimation strategies for li-ion batteries. In Proceedings of the 2016 IEEE Transportation Electrification Conference and Expo (ITEC), Dearborn, MI, USA, 27–29 June 2016; pp. 1–6. [Google Scholar]
- Habibi, S.; Burton, R. The variable structure filter. J. Dyn. Syst. Meas. Control 2003, 125, 287–293. [Google Scholar] [CrossRef]
- Habibi, S. The smooth variable structure filter. Proc. IEEE 2007, 95, 1026–1059. [Google Scholar] [CrossRef]
- Gadsden, S.A.; Habibi, S.R. A new form of the smooth variable structure filter with a covariance derivation. In Proceedings of the 49th IEEE Conference on Decision and Control (CDC), Atlanta, GA, USA, 15–17 December 2010; pp. 7389–7394. [Google Scholar]
- Gadsden, S.A.; El Sayed, M.; Habibi, S.R. Derivation of an optimal boundary layer width for the smooth variable structure filter. In Proceedings of the 2011 American Control Conference, San Francisco, CA, USA, 29 June–1 July 2011; pp. 4922–4927. [Google Scholar]
- Gadsden, S.A.; Lee, A.S. Advances of the smooth variable structure filter: Square-root and two-pass formulations. J. Appl. Remote Sens. 2017, 11, 015018. [Google Scholar] [CrossRef]
- Afshari, H.H.; Gadsden, S.A.; Habibi, S. A nonlinear second-order filtering strategy for state estimation of uncertain systems. Signal Process. 2019, 155, 182–192. [Google Scholar] [CrossRef]
- Zhao, S.; Duncan, S.R.; Howey, D.A. Observability analysis and state estimation of lithium-ion batteries in the presence of sensor biases. IEEE Trans. Control Syst. Technol. 2016, 25, 326–333. [Google Scholar] [CrossRef] [Green Version]
- Partovibakhsh, M.; Liu, G. An adaptive unscented Kalman filtering approach for online estimation of model parameters and state-of-charge of lithium-ion batteries for autonomous mobile robots. IEEE Trans. Control Syst. Technol. 2014, 23, 357–363. [Google Scholar] [CrossRef]
- Zhang, Q.; Yang, Y.; Xiang, Q.; He, Q.; Zhou, Z.; Yao, Y. Noise adaptive Kalman filter for joint polarization tracking and channel equalization using cascaded covariance matching. IEEE Photonics J. 2018, 10, 1–11. [Google Scholar] [CrossRef]
- Smiley, A.J.; Harrison, W.K.; Plett, G.L. Postprocessing the outputs of an interacting multiple-model Kalman filter using a Markovian trellis to estimate parameter values of aged Li-ion cells. J. Energy Storage 2020, 27, 101043. [Google Scholar] [CrossRef]
- Plett, G.L. Dual and joint EKF for simultaneous SOC and SOH estimation. In Proceedings of the 21st Electric Vehicle Symposium (EVS21), Monte Carlo, Monaco, 2–6 April 2005; pp. 1–12. [Google Scholar]
- Dong, G.; Chen, Z.; Wei, J.; Zhang, C.; Wang, P. An online model-based method for state of energy estimation of lithium-ion batteries using dual filters. J. Power Sources 2016, 301, 277–286. [Google Scholar] [CrossRef]
- Mehra, R. Approaches to adaptive filtering. IEEE Trans. Autom. Control 1972, 17, 693–698. [Google Scholar] [CrossRef]
- Mohamed, A.; Schwarz, K. Adaptive Kalman filtering for INS/GPS. J. Geod. 1999, 73, 193–203. [Google Scholar] [CrossRef]
- Duník, J.; Straka, O.; Kost, O.; Havlík, J. Noise covariance matrices in state-space models: A survey and comparison of estimation methods—Part I. Int. J. Adapt. Control Signal Process. 2017, 31, 1505–1543. [Google Scholar] [CrossRef]
- Akhlaghi, S.; Zhou, N.; Huang, Z. Adaptive adjustment of noise covariance in Kalman filter for dynamic state estimation. In Proceedings of the 2017 IEEE Power & Energy Society General Meeting, Chicago, IL, USA, 16–20 July 2017; pp. 1–5. [Google Scholar]
- Song, M.; Astroza, R.; Ebrahimian, H.; Moaveni, B.; Papadimitriou, C. Adaptive Kalman filters for nonlinear finite element model updating. Mech. Syst. Signal Process. 2020, 143, 106837. [Google Scholar] [CrossRef]
- Zhang, L.; Sidoti, D.; Bienkowski, A.; Pattipati, K.R.; Bar-Shalom, Y.; Kleinman, D.L. On the identification of noise covariances and adaptive Kalman Filtering: A new look at a 50 year-old problem. IEEE Access 2020, 8, 59362–59388. [Google Scholar] [CrossRef]
- Nejad, S.; Gladwin, D.; Stone, D. A systematic review of lumped-parameter equivalent circuit models for real-time estimation of lithium-ion battery states. J. Power Sources 2016, 316, 183–196. [Google Scholar] [CrossRef] [Green Version]
- Ahmed, R.; Gazzarri, J.; Onori, S.; Habibi, S.; Jackey, R.; Rzemien, K.; Tjong, J.; LeSage, J. Model-based parameter identification of healthy and aged li-ion batteries for electric vehicle applications. SAE Int. J. Altern. Powertrains 2015, 4, 233–247. [Google Scholar] [CrossRef] [Green Version]
- Rahimifard, S.; Habibi, S.; Tjong, J. Dual Estimation Strategy for New and Aged Electric Vehicles Batteries. In Proceedings of the 2020 IEEE Transportation Electrification Conference & Expo (ITEC), Chicago, IL, USA, 23–26 June 2020; pp. 579–583. [Google Scholar]
- Guha, A.; Patra, A. State of health estimation of lithium-ion batteries using capacity fade and internal resistance growth models. IEEE Trans. Transp. Electrif. 2017, 4, 135–146. [Google Scholar] [CrossRef]
- Gadsden, S.; Habibi, S. A new robust filtering strategy for linear systems. J. Dyn. Syst. Meas. Control 2013, 135, 014503. [Google Scholar] [CrossRef]
- Gadsden, S.A.; Habibi, S.R.; Kirubarajan, T. A novel interacting multiple model method for nonlinear target tracking. In Proceedings of the 2010 13th International Conference on Information Fusion, Edinburgh, UK, 26–29 July 2010; pp. 1–8. [Google Scholar]
- Ding, W.; Wang, J.; Rizos, C.; Kinlyside, D. Improving adaptive Kalman estimation in GPS/INS integration. J. Navig. 2007, 60, 517. [Google Scholar] [CrossRef] [Green Version]
- Dynamometer Drive Schedules. Available online: https://www.epa.gov/vehicle-and-fuel-emissions-testing/dynamometer-drive-schedules#vehicleDDS (accessed on 10 October 2021).
- Chen, L.; Lü, Z.; Lin, W.; Li, J.; Pan, H. A new state-of-health estimation method for lithium-ion batteries through the intrinsic relationship between ohmic internal resistance and capacity. Measurement 2018, 116, 586–595. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Manufacture | Batterist |
| Type | NMC Li-ion Polymer |
| Nominal Capacity (mAh) | 5400 |
| Nominal Voltage (V) | 3.7 |
| Minimum Voltage (V) | 2.8 |
| Maximum Voltage (V) | 4.2 |
| Parameters | ||||||
|---|---|---|---|---|---|---|
| Upper Bound | 0.025 | 0.0079 | 0.089 | 1 | 27 | 355 |
| Lower Bound | 0.00117 | 0.000038 | 0.0012 | 0.1 | 8 | 74 |
| Example | 0.0018 | 0.0028 | 0.0082 | 0.5543 | 11.929 | 111.57 |
| Parameters | R | Q | P | |||
|---|---|---|---|---|---|---|
| Optimal Value | 5 | 0 | 6 | 0.23 | ||
| Non-Optimal Value | 50 | 1 | 6 | 0.23 |
| Different Scenarios | Ideal Scenario | In Presence of Noise and Current Bias | |||
|---|---|---|---|---|---|
| Initial Conditions | Optimal Initial Noise Covariance | Non-Optimal Initial Noise Covariance | Optimal Initial Noise Covariance | Non-Optimal Initial Noise Covariance | |
| EKF | 1.9735 | 0.5033 | 1.2640 | 2.5416 | |
| SVSF-VBL | 0.3776 | 0.3776 | 0.5207 | 0.6462 | |
| ASVSF-VBL | 0.4304 | 0.4304 | 0.5386 | 0.5386 | |
| EKF | 0.000499 | 0.000695 | 0.0005477 | 0.000441 | |
| SVSF-VBL | 0.000276 | 0.000276 | 0.000241 | 0.000241 | |
| ASVSF-VBL | 0.00014 | 0.00014 | 0.00032 | 0.00032 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rahimifard, S.; Habibi, S.; Goward, G.; Tjong, J. Adaptive Smooth Variable Structure Filter Strategy for State Estimation of Electric Vehicle Batteries. Energies 2021, 14, 8560. https://doi.org/10.3390/en14248560
Rahimifard S, Habibi S, Goward G, Tjong J. Adaptive Smooth Variable Structure Filter Strategy for State Estimation of Electric Vehicle Batteries. Energies. 2021; 14(24):8560. https://doi.org/10.3390/en14248560
Chicago/Turabian StyleRahimifard, Sara, Saeid Habibi, Gillian Goward, and Jimi Tjong. 2021. "Adaptive Smooth Variable Structure Filter Strategy for State Estimation of Electric Vehicle Batteries" Energies 14, no. 24: 8560. https://doi.org/10.3390/en14248560
APA StyleRahimifard, S., Habibi, S., Goward, G., & Tjong, J. (2021). Adaptive Smooth Variable Structure Filter Strategy for State Estimation of Electric Vehicle Batteries. Energies, 14(24), 8560. https://doi.org/10.3390/en14248560