1. Introduction
The world’s population is increasing at an alarming rate; the increased population needs improved facilities and optimal use of natural resources without bringing a significant undesirable change in the atmosphere. Transportation and mobility are some of the necessities of modern-day life. Rotary machines have been widely used and employed in transportation systems like Railways and Hybrid Electric Vehicles (HEVs). However, rotary machines for linear motion require an efficient gearing system, which increases the machine’s overall cost and considerably lowers efficiency. Linear Induction Machines (LIMs) have been used recently to overcome the gearing system hurdle.
LIMs require a lower volume of secondary and thereby reduce the cross-sectional area of the tunnels and underground stations. Given all the advantages and lower manufacturing cost, LIMs have been adopted in many railway transits [
1,
2]. However, the significant shortcomings in LIMs are the power factor and efficiency of the machine are not satisfactory. In comparison to LIMs, Linear Flux Switching Machines (LFSMs) have higher thrust force [
3], quick dynamic response system [
4], bipolar flux linkage [
5], and higher overload capacity [
6] with low cost and robust secondary [
7]. As in LFSM, all the excitation sources are placed on the short mover, leaving the secondary part completely passive, which makes it suitable for railway transits. Broadly, division of LFSM based on geometry results in two significant types (a) Single-Sided LFSM (SLFSM) (b) Double-sided LFSM (DLFSM). SLFSM provided the required thrust force in the
x-axis with a high normal (attractive/repulsive) force in the
y-axis [
8]. The latter is undesirable, acts as parasitic/fractional force, and affects the machine bearing system [
9]. To overcome the normal force problem, DLSFM is introduced, which cancels the effect of normal force and increases the resulting system’s efficiency [
10]. DLFSM can be further subdivided into two major topologies: (a) dual stator with a single mover and (b) dual mover with a single stator. The dual stator can be achieved by connecting two movers back to back so that the two stators sandwich the mover, while in the case of dual mover, the stators are connected back to back in a mirror image that forms in between the two movers [
11].
The excitation source is also one of the attributes on which the LFSMs are divided into three categories: (a) Permanent Magnet LFSMs (PMLFSMs), in which the main excitation source is a permanent magnet, (b) Field Excited LFSMs, in which the excitation source is Direct Current (DC), and (c) Hybrid Excited LFSMs (HELFSM), which are excited by all three sources, i.e., PM, DC, and AC. All three types have major applications such maglev transportation [
12], railway transit [
13], linear actuator for oil pumping, and electromagnetic lunch system [
14] due to its high thrust force density and higher efficiency [
15]. Prices of rare earth magnets such as neodymium and dysprosium increase day by day, and thereby its use in PMLFSM increases the manufacturing cost of the machine. To lower the cost, machines such FELFSM and HELFSM are proposed, which, like PMLFSM, have high thrust force density and higher overall efficiency without using the rare earth magnet. FELFSM only has DC excitation. It has a lower thrust force density than HELFSM, and DC excitation increases the overall copper losses of the machine, thereby decreasing the whole machine’s efficiency [
16].
DSLFSM has advantages such as higher thrust force density, higher power factor, and efficiency; however, detent force is a severe drawback and introduces a high thrust ripple. Authors in [
17,
18,
19] suggest optimization of PM length and width, skewing of the stator tooth, and replacing common stator tooth by staggered tooth, respectively, to minimize the detent force. Staggering of the stator tooth majorly decreases the detent force, but it also results in a lower thrust force density. Modular structure has been used and employed to reduce the end effect and mitigate the machine’s end effect [
20]. Cao et al. [
21] presents a comparative study of switched reluctance permanent magnet machine and linear flux switching machine for railway transportation. The author in [
22] uses a genetic algorithm to optimize LIM considering important performance parameters. Authors in [
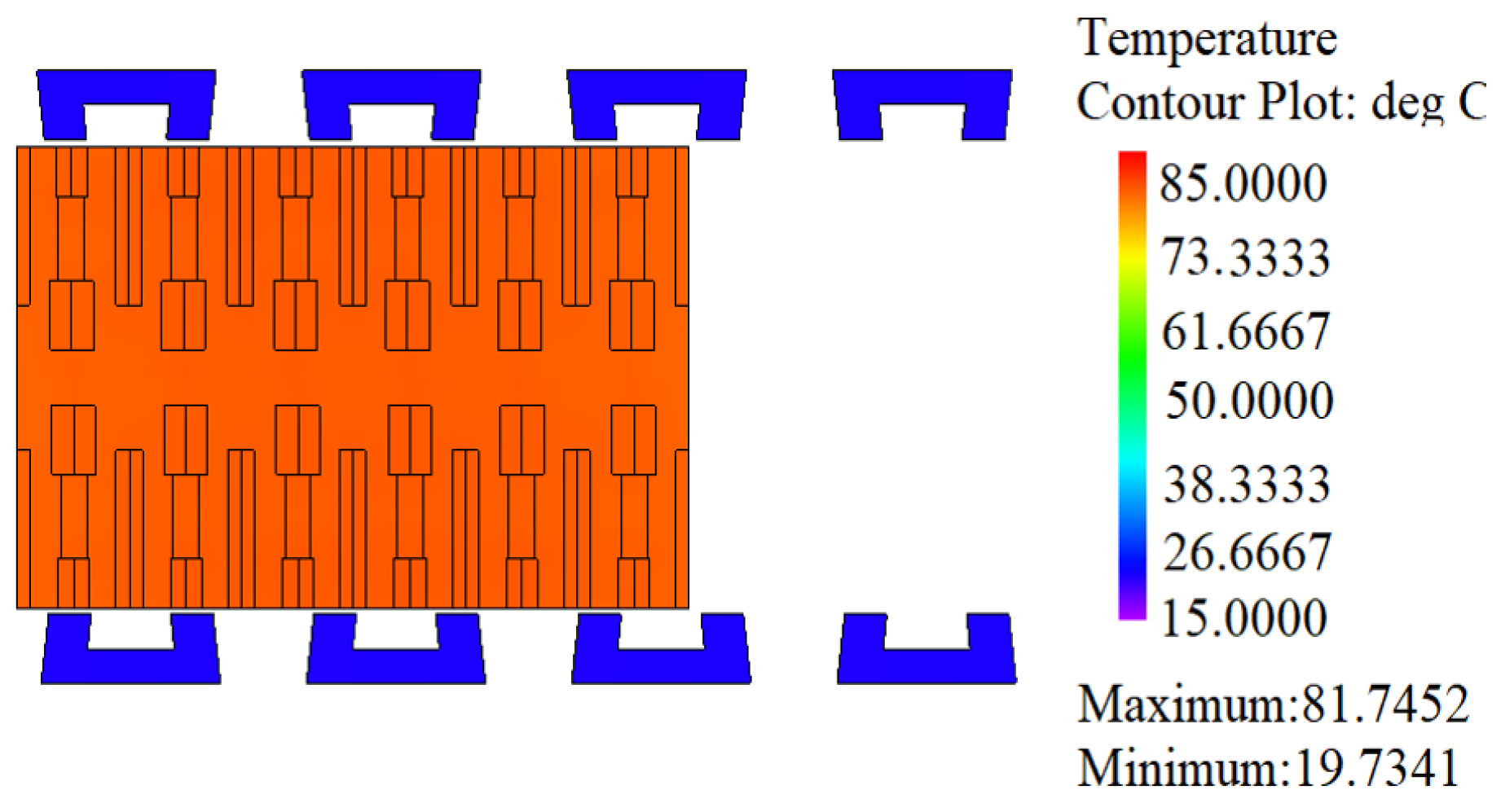
23] have analyzed temperature distribution and ignored the overall rise in temperature of the machine. Sun et al. [
24] considered temperature distribution in different parts of the machine by performing 2D and 3D analysis, but this technique makes the process very time-consuming and complex. Authors in [
25,
26] divided the whole of the machine into different parts, and then found the temperature at every part individually, which is an efficient and robust method with reliable results.
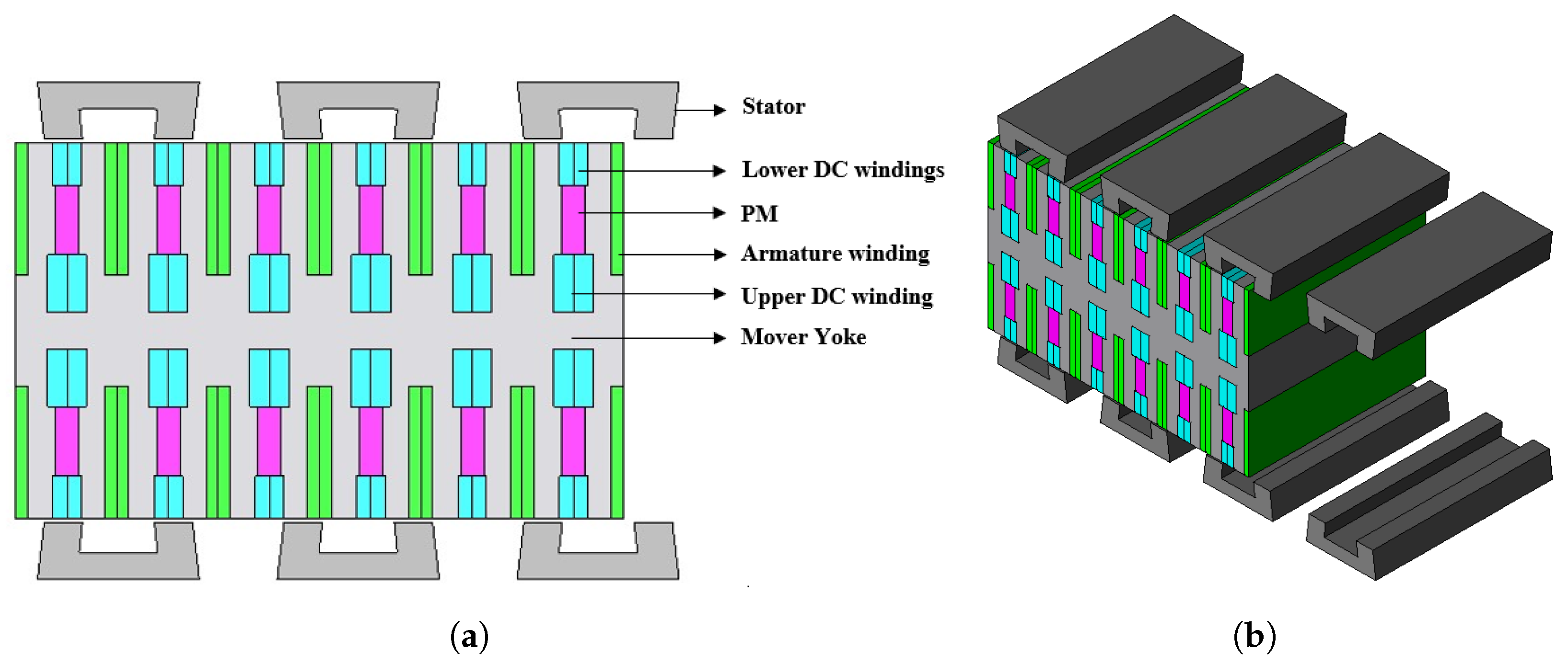
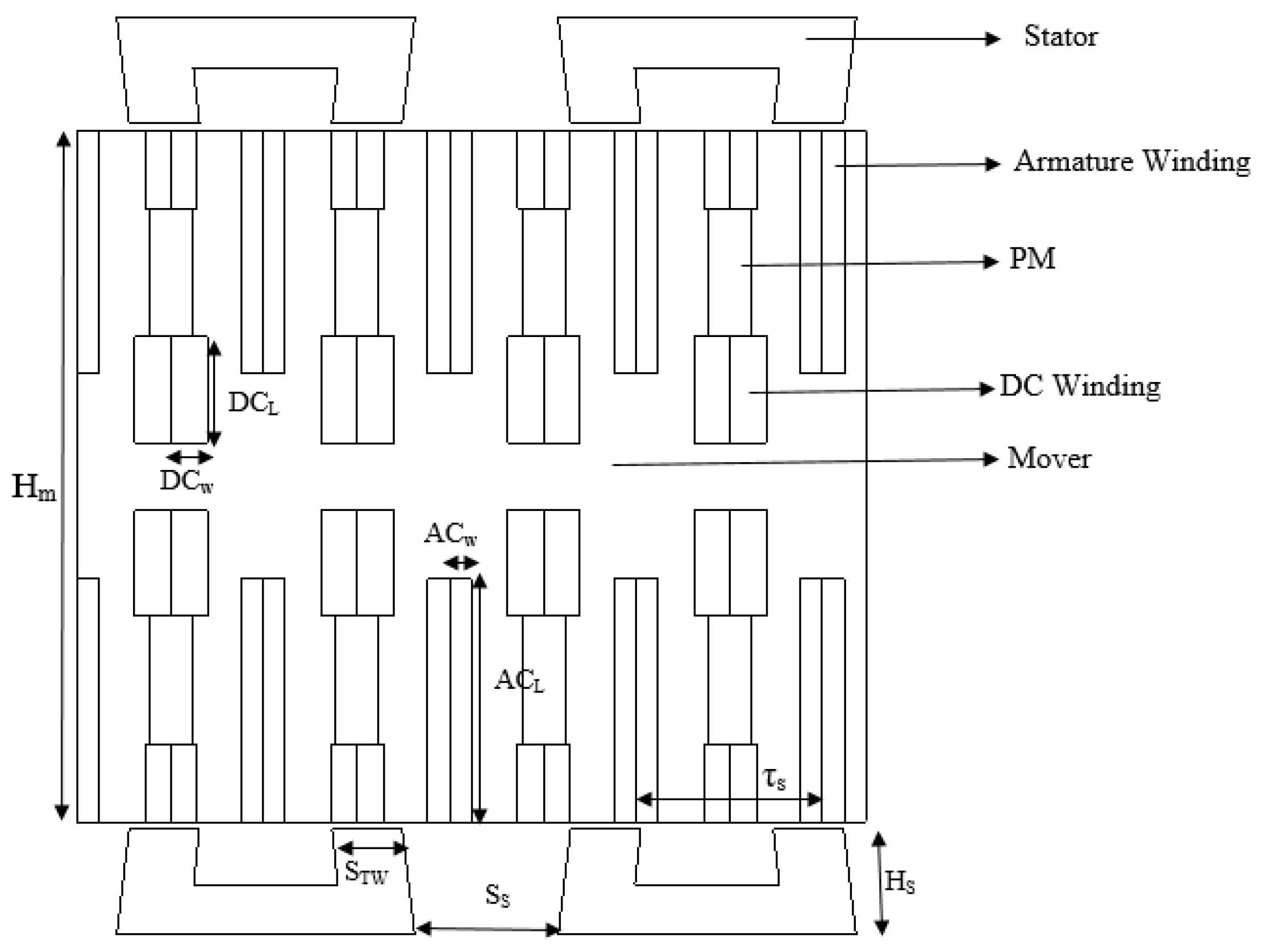
This paper presents a DSLFSM with a crooked tooth modular stator. Two DC excitation windings are placed above and below the ferrite magnet. Concentrated armature winding overlaps the PMs, thereby enhancing the overall flux linkage of the machine. Modular stator decreases iron consumption and manufacturing cost and increases overall efficiency by reducing iron losses. Ferrite magnets are employed to lower the cost of the machine. 2D FEA analysis is performed by registered JMAG version 20.1. Several key parameters are optimized by geometric optimization (GO) and genetic algorithm (GA) to increase the machine’s overall performance.
The rest of the paper is divided into eight main parts,
Section 2 presents the machine topology,
Section 3 presents the working principle of the machine,
Section 4 shows the electromagnetic performance of the machine,
Section 5 shows the influence of different parameters on the performance of the machine and optimization of those parameters.
Section 6 presents efficiency analysis and thermal analysis is done in
Section 7. Finally,
Section 8 presents the overall summary of the paper.
3. Working Principle
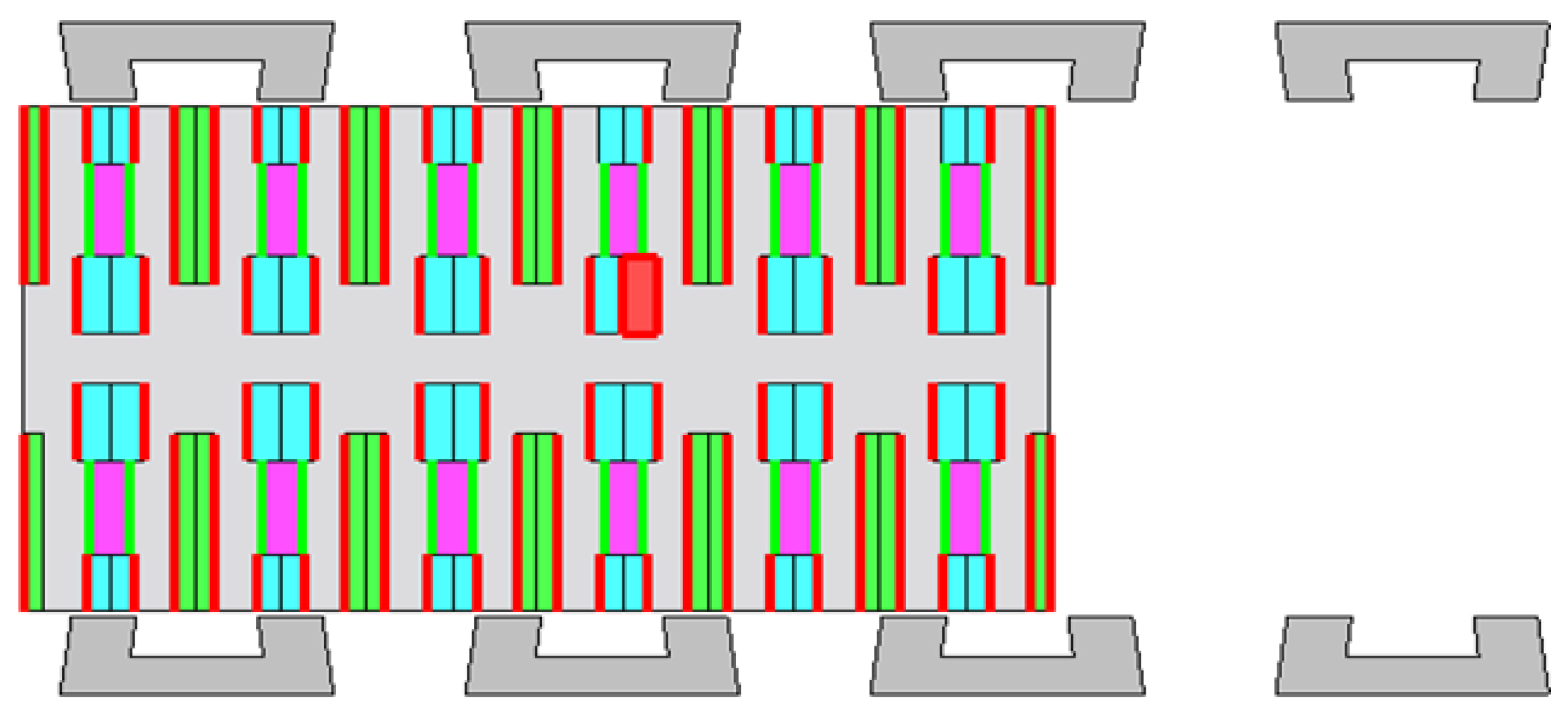
As the mover is sandwiched between the two stators and all the excitation sources are present in the mover, the flux starts at the mover. Both DC and permanent magnets are so aligned that they reinforce each other’s flux.
Figure 3 shows the flux linkage due to PM excitation only; it can be seen that it only circles in the yoke of the mover, and a minimal amount of it goes into the stator.
Figure 4 shows the flux linkage because of DC, and it can be seen that a considerable amount of flux passes through the machine’s stator.
Figure 5 shows the combined flux linkage of both DC and PM, and it can be seen that the flux follows a path flowing through yoke through the magnet to the stator, then from the stator back to the mover pole, and then passes through the magnet into the yoke, then onto the second side of the machine. As the machine’s stator is modular, therefore, to have a sinusoidal flux linkage, the modules should be placed at a specific distance. The number of stator poles should be carefully selected using Equation (
1).
where
represents the stator pole,
represents the mover slots,
q denotes the number of phases and n is any natural number. Various values of natural numbers are considered, and the respective pole/slot combination is analyzed. It was observed from the analysis that the machine has a bipolar flux linkage and unipolar thrust force (TF) for two combinations, 5/6 and 6/7 given in
Table 2. The thrust force for the 6/7 combination was lower than the 5/6 combination; therefore, it was neglected.
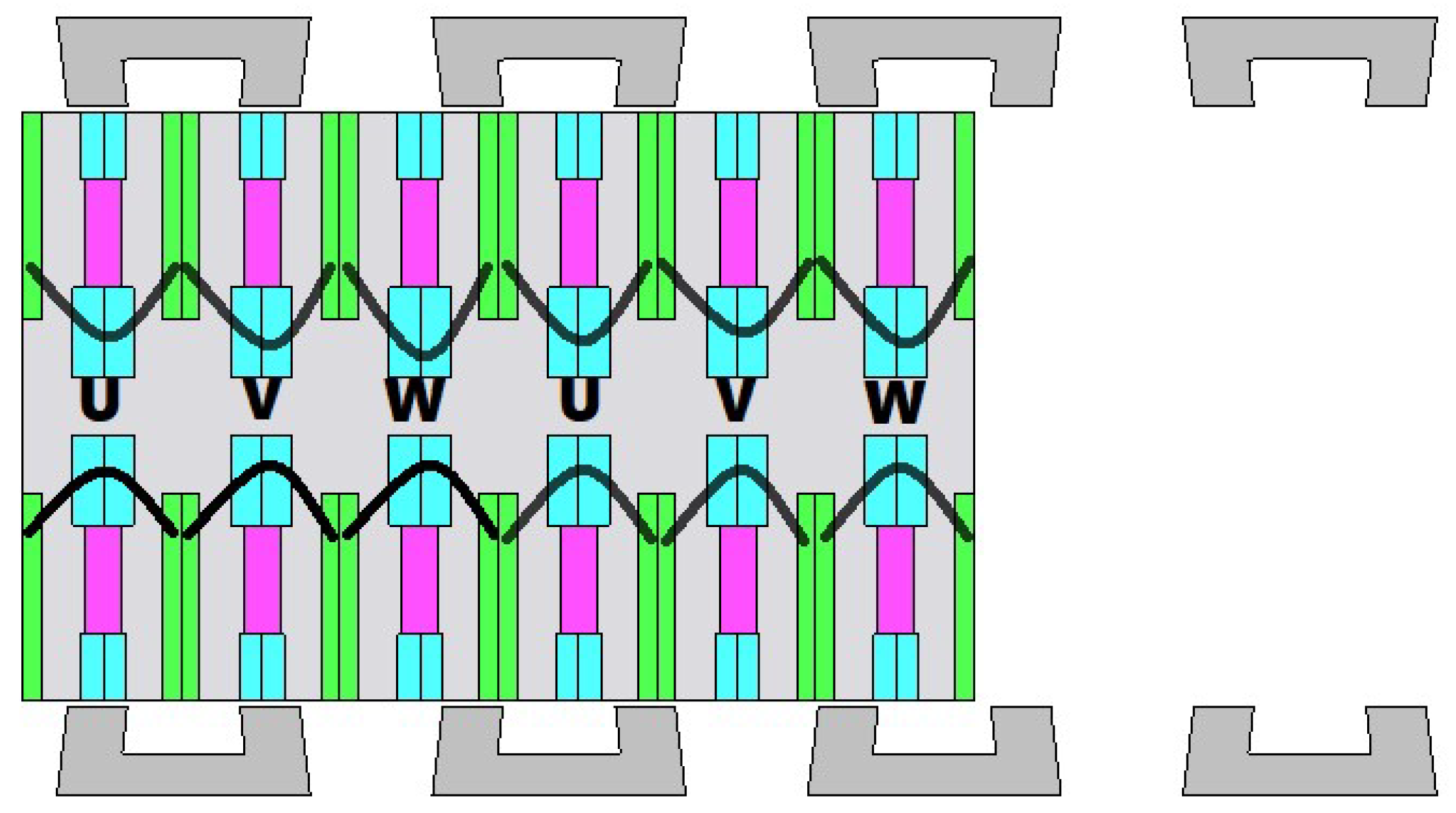
After successful selection of the pole/slot combination, the machine’s winding configuration can be selected accordingly. The type of winding to be used is dependent on the coil span of the machine, which is the axial distance between the starting and ending point of the coil and is given by Equation (
2)
where
represents the coil span,
is to return maximum, and the
is to return a whole number. For a three-phase balanced machine, the individual phases should be separated by Y120°. Phase offset, in this case, can be found by using Equation 3, where
is the phase offset and
q is an integer value of
.
Different values of
q are considered and analyzed, and if no suitable value for the integer is found, then the pole/slot combination is changed. In the case of the 5/6 combination, the value for
is 1, so concentrated winding is considered.
Figure 6 shows the winding configuration of the machine.
4. Electromagnetic Performance Analysis
Key performance parameters like no-load flux linkage
, corresponding THDs, detent force (
), thrust force (TF), and normal force (
) of the machine are analyzed and observed. Parameters like
,
, and
are achieved from the 2D FEA analysis directly, while the mathematical calculation is required to find THDs and thrust force density (
). Equation (
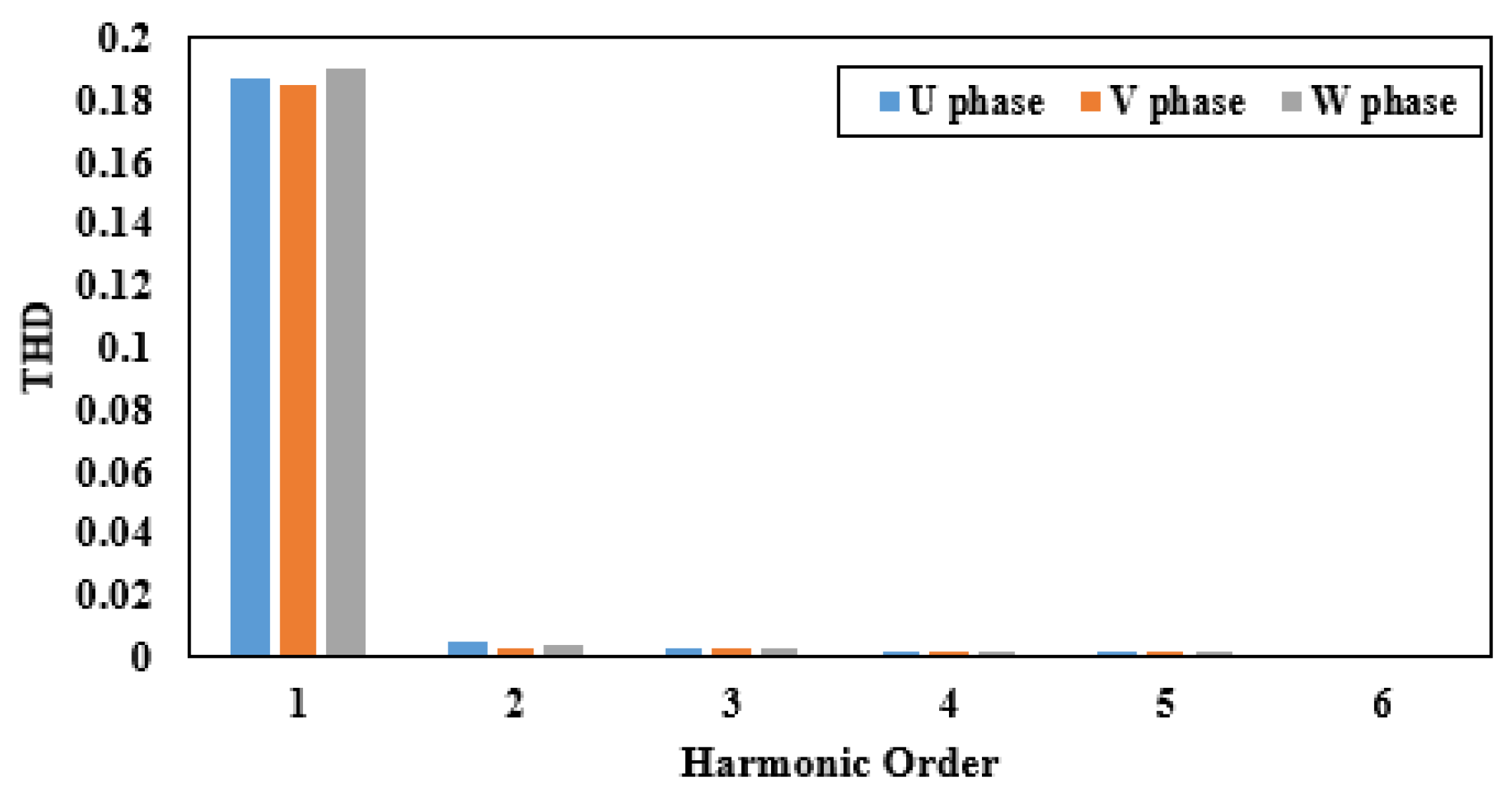
4) is used to find THDs of the machine, considering harmonic components of the flux linkage.
where
represents the flux linkage’s fundamental component and
up to
represents the harmonic components.
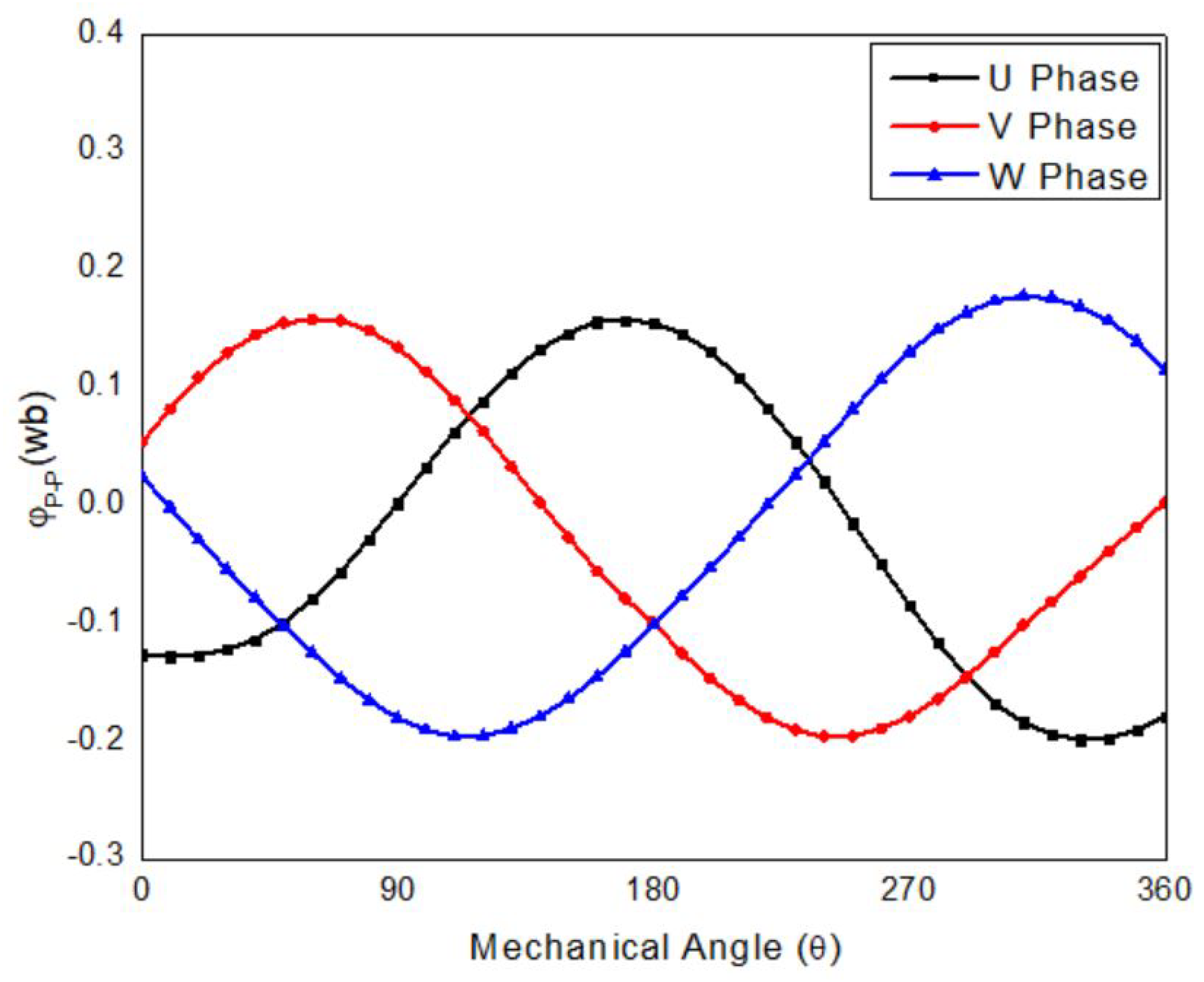
Figure 7 represents the no-load flux linkage of the machine while
Figure 8 represents its harmonics. It can be observed that all the phases are purely sinusoidal, and the difference between the positive peaks of the phases is not considerable, showing lower or no end effect. The difference between the positive and negative peaks is present, which is a sign of leakage flux or saturation. Thrust force density (
) of the machine is calculated using Equation (
5), where
represents the average thrust force, and
represents the volume of the machine.
Figure 9 shows detent force for the proposed HEDSLFSM. It is a no-load force between the stator pole and mover slot, which either pulls or pushes the mover. If the detent force is positive, it pushes the machine forward, and if it is negative, it pulls the machine backward. This push and pull causes ripples in the thrust force and the overall ripple rate increases. HEDSLFSM experiences a bipolar detent force, whereas the thrust force is unidirectional (
x-axis). The detent force’s influence can be observed from
Figure 10; when the detent force increases in the positive direction, the thrust force also increases, and when the detent force decreases and attains a negative value, the thrust force also decreases.
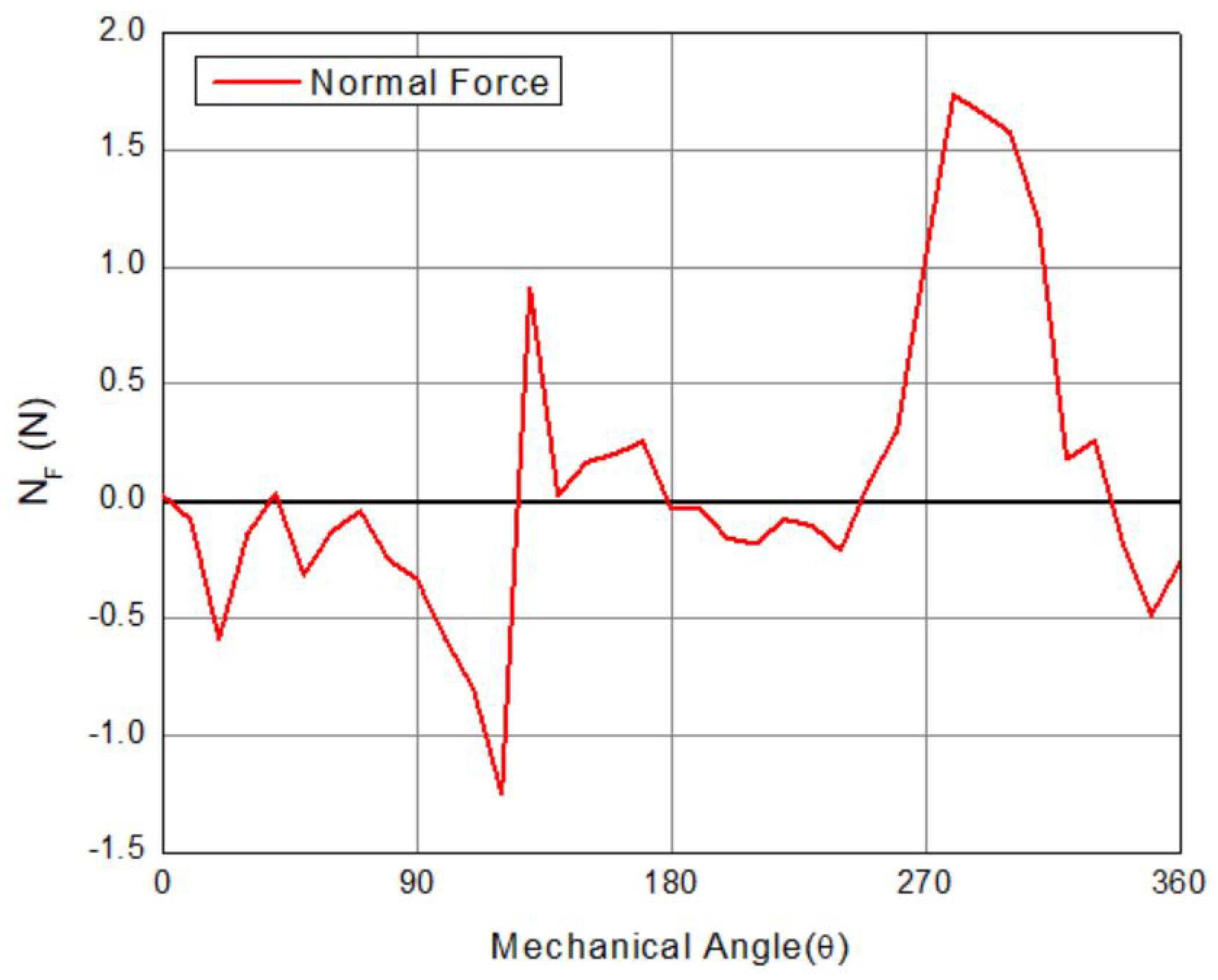
Attraction or repulsion between the mover and the stator is represented by normal force (
), which adds frictional forces and puts an extra burden on the bearing system.
is presented in
Figure 11; which has an average value of zero because of the double-sided nature of the HEDSLFSM.
is attractive; as can be seen from the value, because of the increased magnitude of negative flux linkage compared to positive.
The current density of the machine also plays an important role in the machine’s performance and is one of the key performance parameters in performance analysis. The machine’s performance is analyzed at different current densities to check whether or not the machine is saturated. HEDSLFSM is analyzed at different current densities, and the performance is observed.
Figure 12 shows TF at different current densities. It can be seen that initially, the line increases linearly, but after a point, it loses its linearity because the machine is moving toward the saturation region. The machine’s current density is calculated using Equation (
6), where S is the slot area, I is the RMS current
is the filling factor.
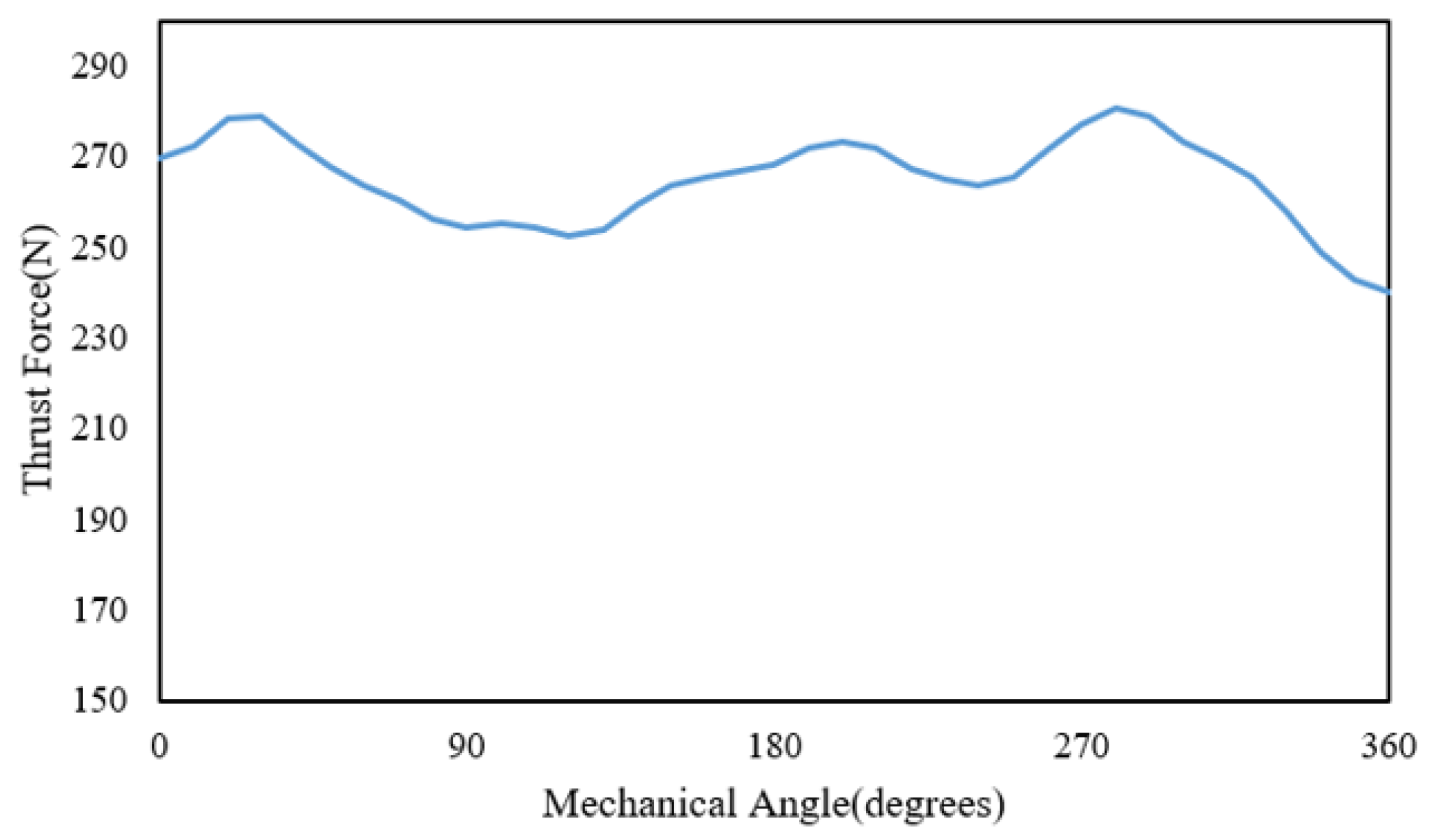
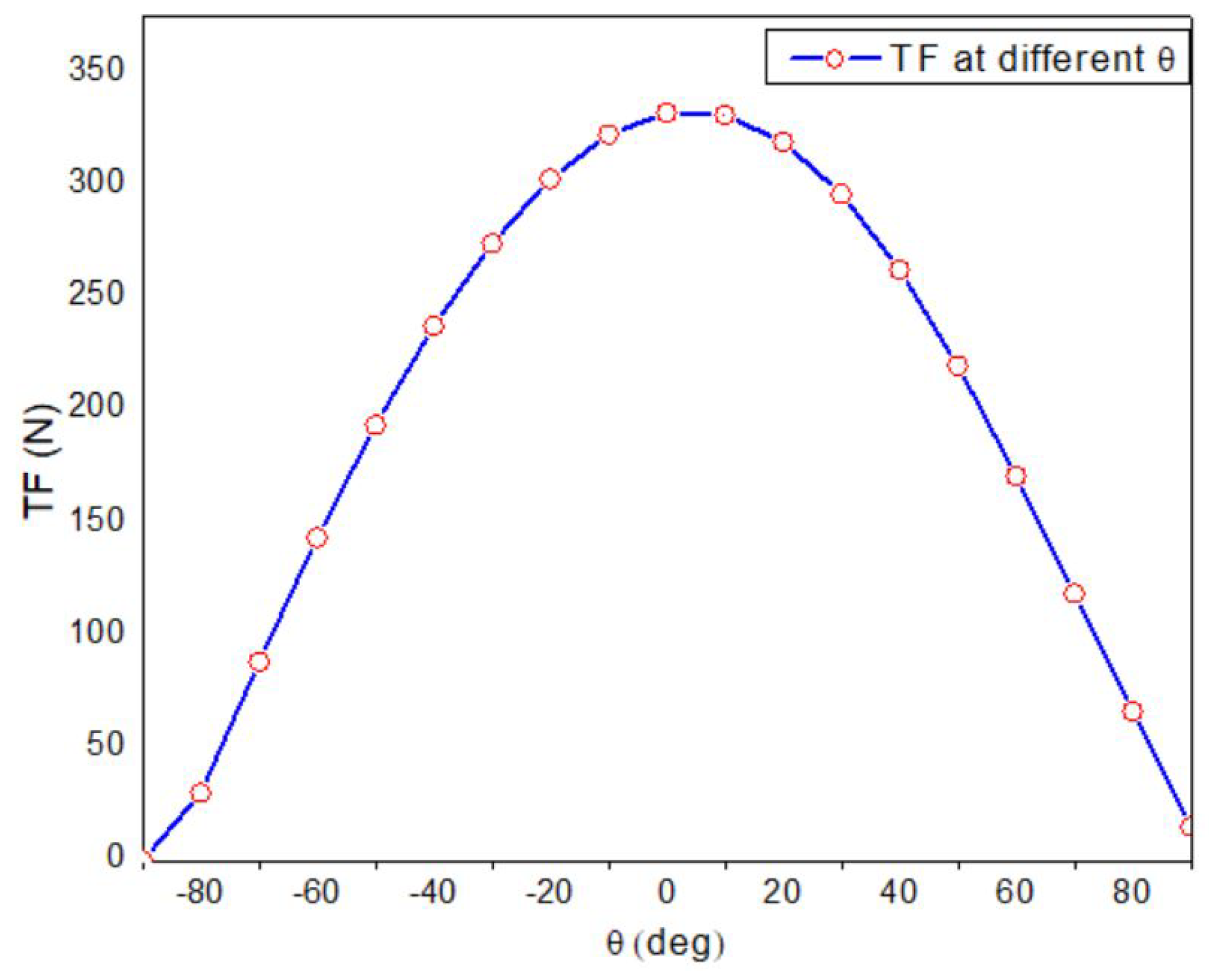
The performance of the machine is analyzed and observed at different starting angles. Starting angle is the phase angle of applied current to the machine at which the thrust force is produced. If the angle is changed, the machine’s performance helps to evaluate the dynamic performance of the machine. It can be seen from
Figure 13 that the machine performs best at starting angle 0.
5. Optimization of Geometric Variables
Two types of optimization techniques have been applied to increase the TF and improve the machine’s performance. For parameters like S.R, , , and PM, a geometric optimization technique is used, and for , , , and , JMAG inbuilt Genetic Optimization technique is employed, and the respective parameters are optimized.
5.1. Geometric Optimization
Single variable geometric optimization is used, which leads to a sequential solution of various geometric variables. It is advantageous because it reduces the computational complexity and time required for optimization. Being sequential in nature, the optimization variables are entirely independent of the previous value.
Figure 14 shows the flow chart for geometric optimization. S.R is the ratio between the height of the stator to the height of the whole machine and is calculated using Equation (
7).
represents the stator’s height,
is the mover height, and
represents the airgap’s length. Different S.R values are considered, and their influence on the performance parameters like TF,
, and
is observed. TF is considered as the main priority in optimization.
Table 3 shows the detail of split ratio optimization and analysis. It can be seen that the TF increases up to S.R of 0.20; after that, the TF tends to decrease, with the maximum thrust force being observed at S.R of 0.20 with
of 0.8 Wb.
A higher value of split ratio means a bigger stator width, which increases the iron losses and the machine’s manufacturing cost. The lower value of the split ratio means a bigger mover that increases the mover mass. Therefore, the bearing system efficiency decreases, and iron losses and iron volume increases, thereby lowering the machine’s overall efficiency.
The winding slot area for both DC and AC is optimized using geometric optimization. The slot area is selected according to the number of conductors to be placed. Additionally, the current density of the machine has a role in selecting the slot area. Since the current density cannot be increased from a certain limit as the machine gets saturated, the slot area cannot be increased from a certain value. A higher slot area also decreases the mover’s teeth’ width and thereby leads it to saturate.
Table 4 shows the detailed optimization of the slot area.
5.2. Genetic Optimization
Parameters such as STW,
, and
are optimized using JMAG in-built optimization technique. The objective function and constraints are given in
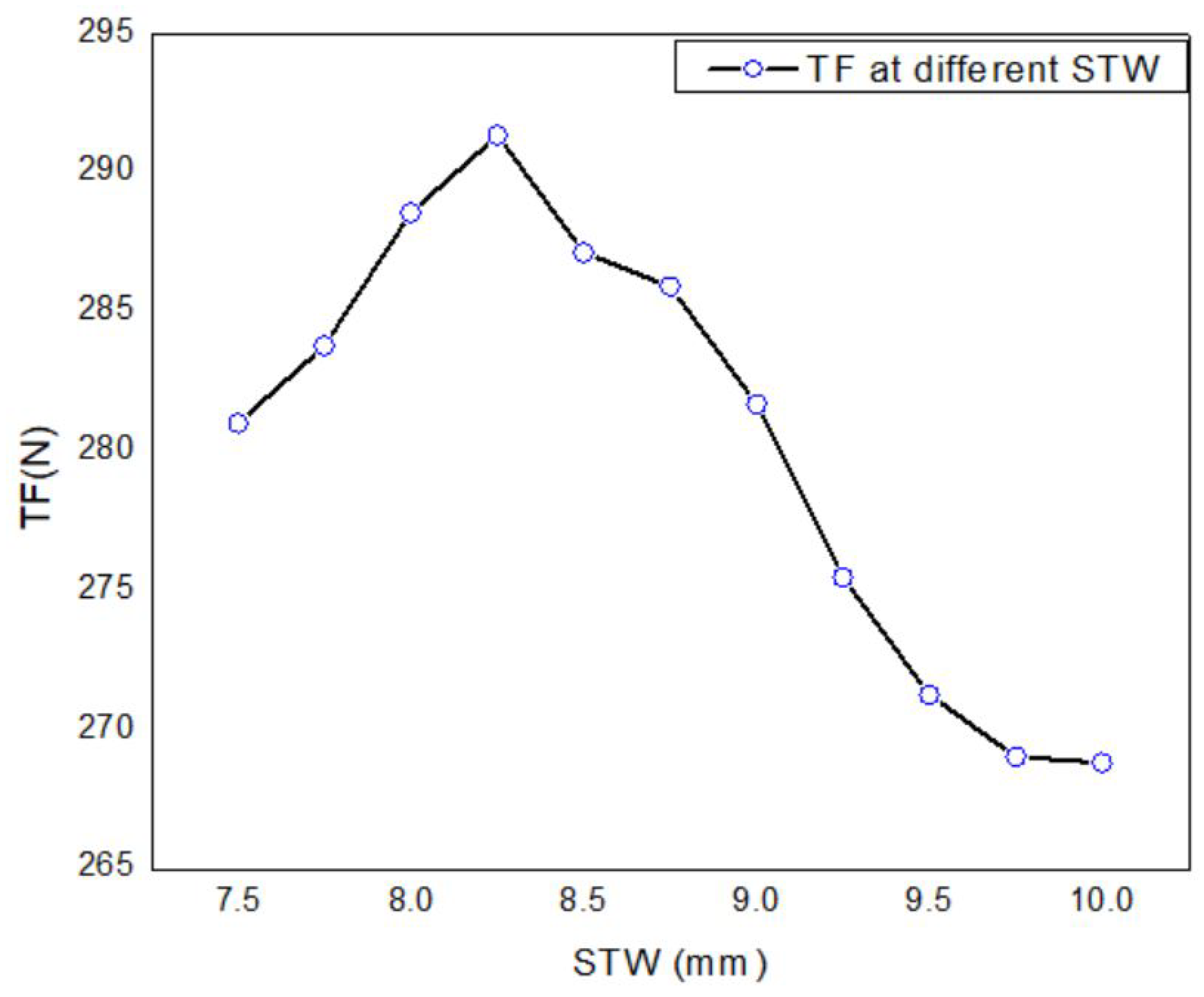
Table 5. Optimal selection of STW of the machine mainly influences the coil flux linkage, affecting the machine’s thrust force. If the tooth width is reduced too much, it affects both the flux linkage, as it either goes to saturation or the flux linkage value decreases. If the width is increased, it increases the iron losses and manufacturing cost of the machine.
Figure 15 shows the influence of the STW on the average thrust force of the machine. A maximum TF of 291.36 N is observed at
8.33 mm, so it is considered.
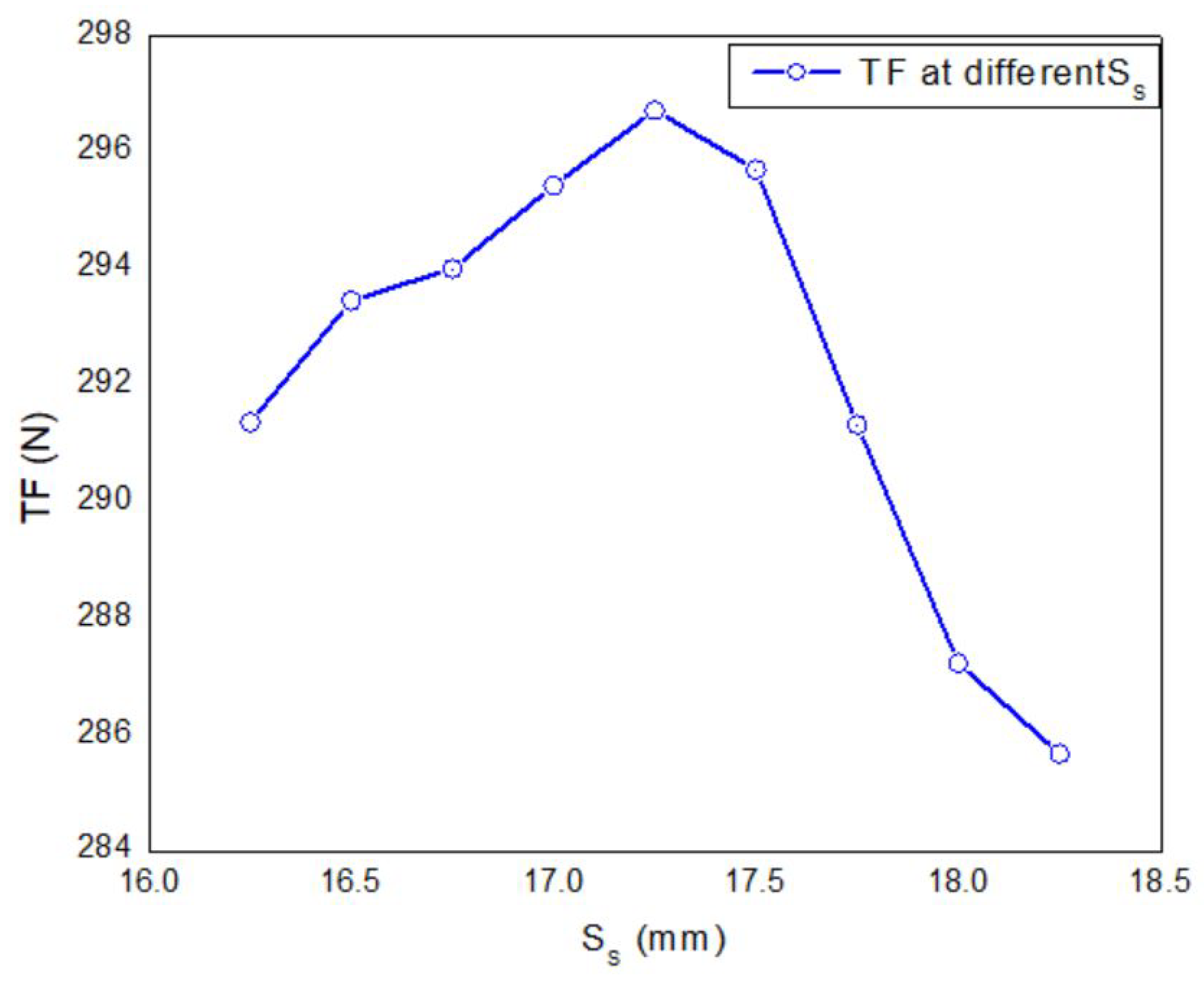
Since the stator is in the form of U-shaped modules, the optimal placement of these modules is very important to have a good flux linkage. Spacing between the module is optimized, and its effect on the overall thrust force is observed. It can be seen from
Figure 16 that initially, the TF increases with the increase in the spacing of the module since the flux linkage increases, but after a certain point, a gradual decrease in the thrust force can be observed. Maximum TF of 296.72 N at 17.01 mm.
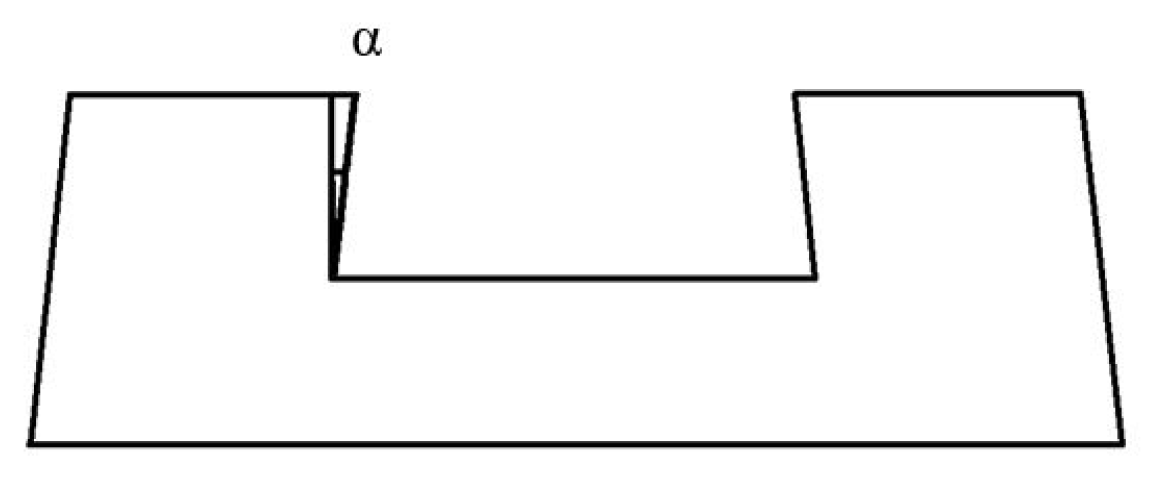
The crooked angle is the angle between the inside of the stator tooth and the yoke of the stator. It is optimized to increase the alignment of the mover slot and stator pole; thus, the TF also increases. TF increases linearly from
to
, and then a decrease in the TF is noted. Maximum TF is observed at
.
Figure 17 represents a crooked angle, while
Figure 18 shows how the crooked angle influences the average thrust force.
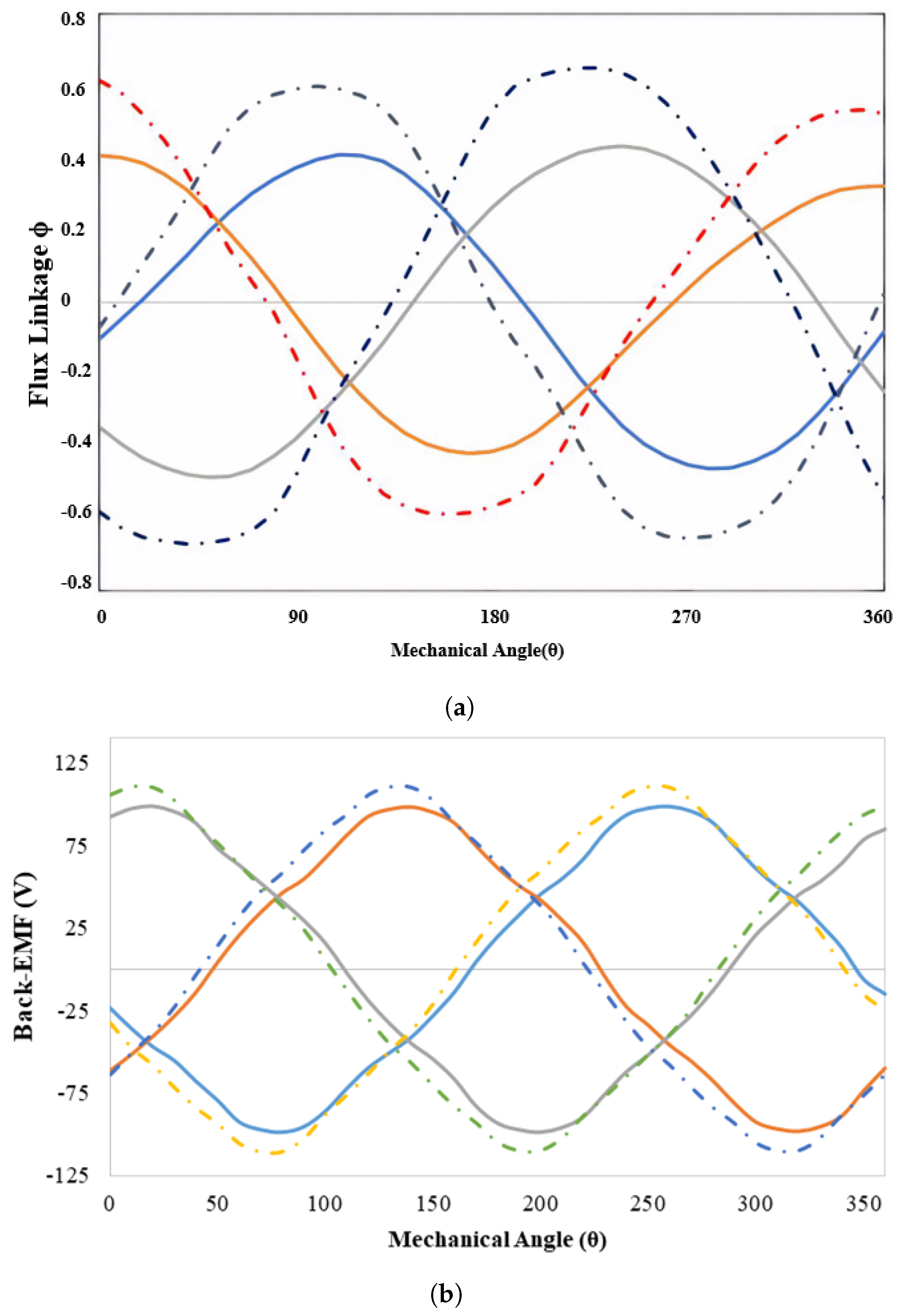
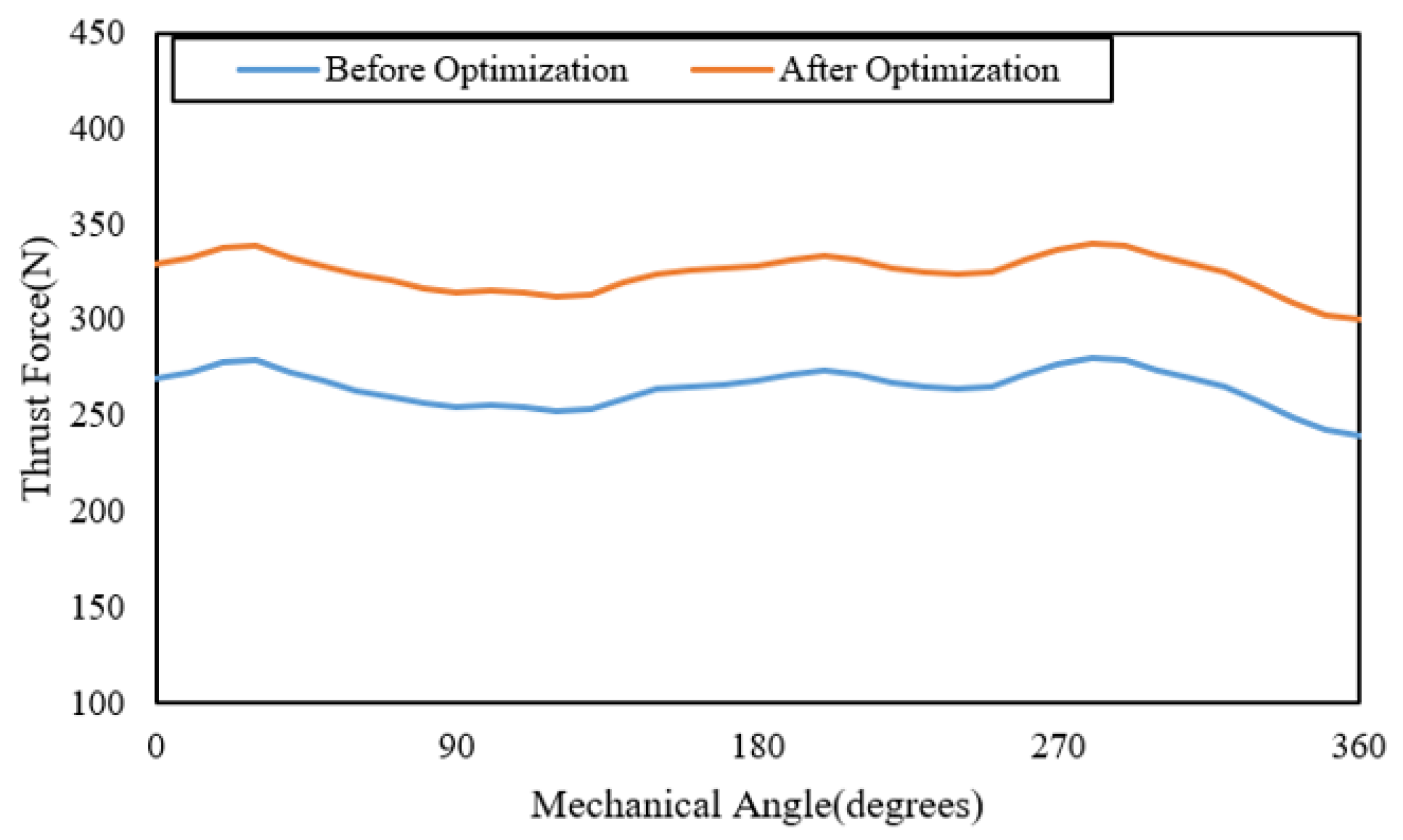
Table 6 presents the detail of all the optimization and the resultant change in key performance parameters such as TF,
, and
. Comparison of initial and final
and back-EMF is shown in
Figure 19a,b, respectively. The initial and optimized TF is shown in
Figure 20. A clear difference between the initial and final can be observed.
6. Efficiency Analysis
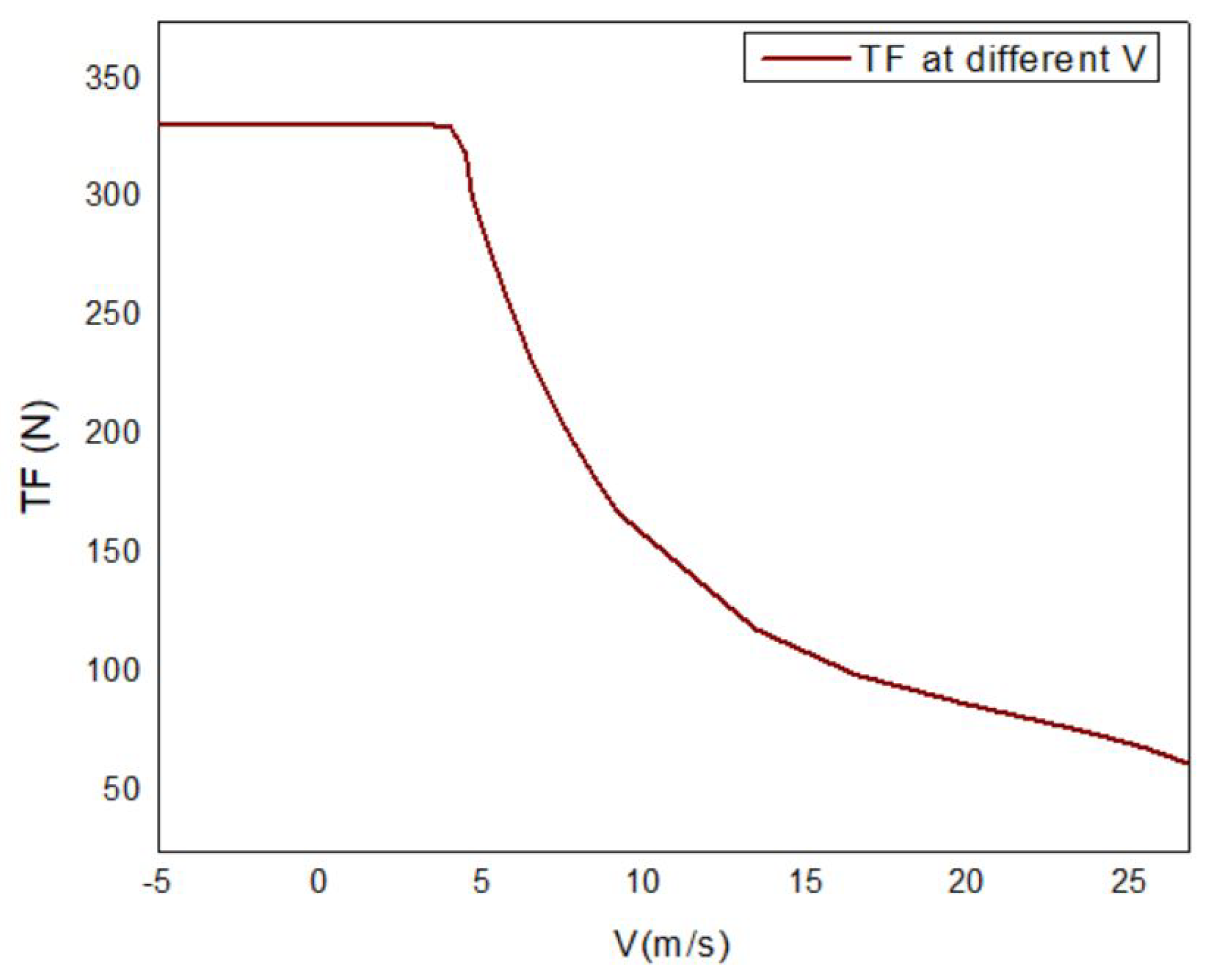
The machine’s performance is observed at different velocities, and the resultant TF of the machine is noted.
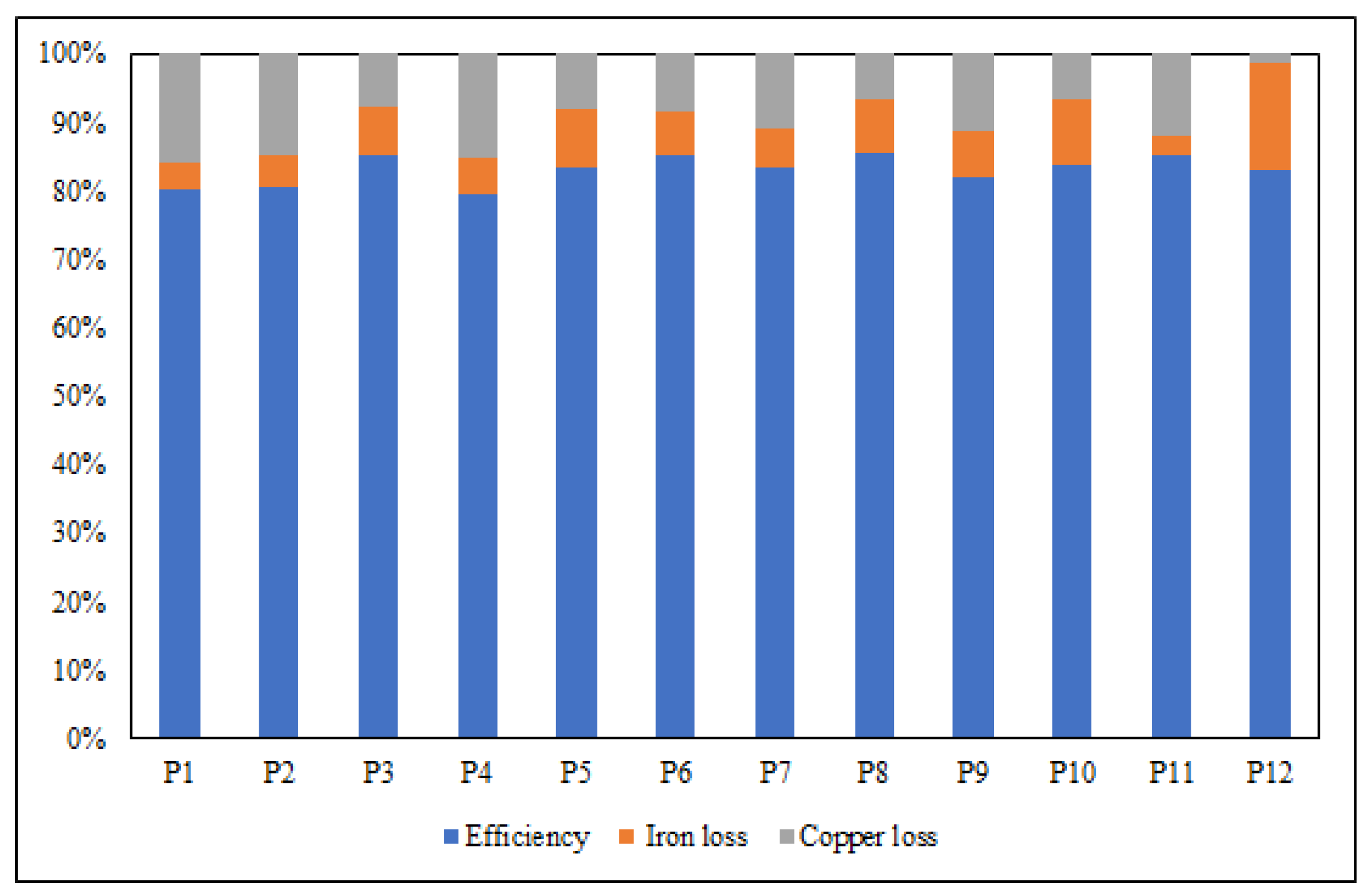
Figure 21 shows TF at different velocities. Several points in the TF vs. Velocity graph are considered for efficiency calculation, and the resultant efficiency of the machine is calculated.
Figure 22 shows the resulting iron losses, copper losses, and the machine’s efficiency at that selected point. Points selected in the thrust force vs. velocity curve are represented across the
x-axis, and efficiency at that specific point is represented on the
y-axis. At point 1, the copper and iron losses of 278 W and 153 W are calculated while at point 12, the iron losses were at a maximum (approximately 309 W), and hence efficiency is lower at these two points. The machine’s overall efficiency is calculated by taking the average of the efficiencies observed at various points. The average efficiency of the proposed machine at different points is 83%. The relation between velocity and output power is shown in
Figure 23 and the proposed machine has a power factor of 0.76 lagging under loaded condition.
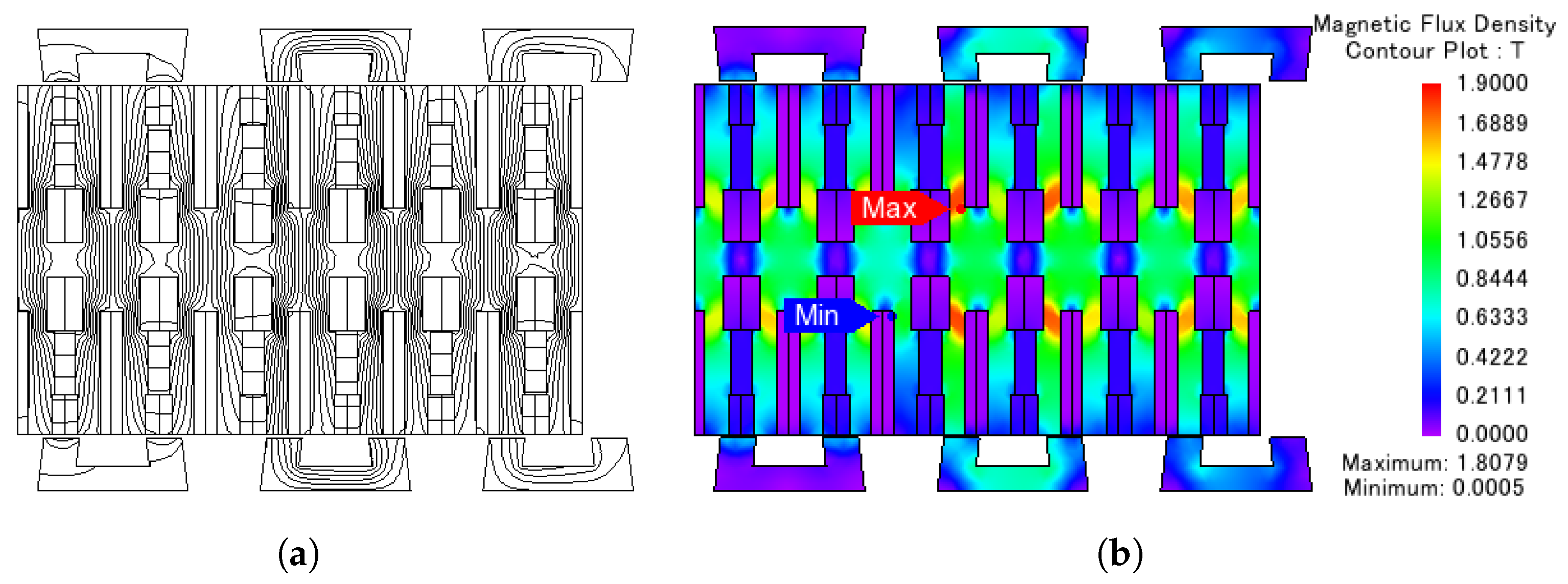
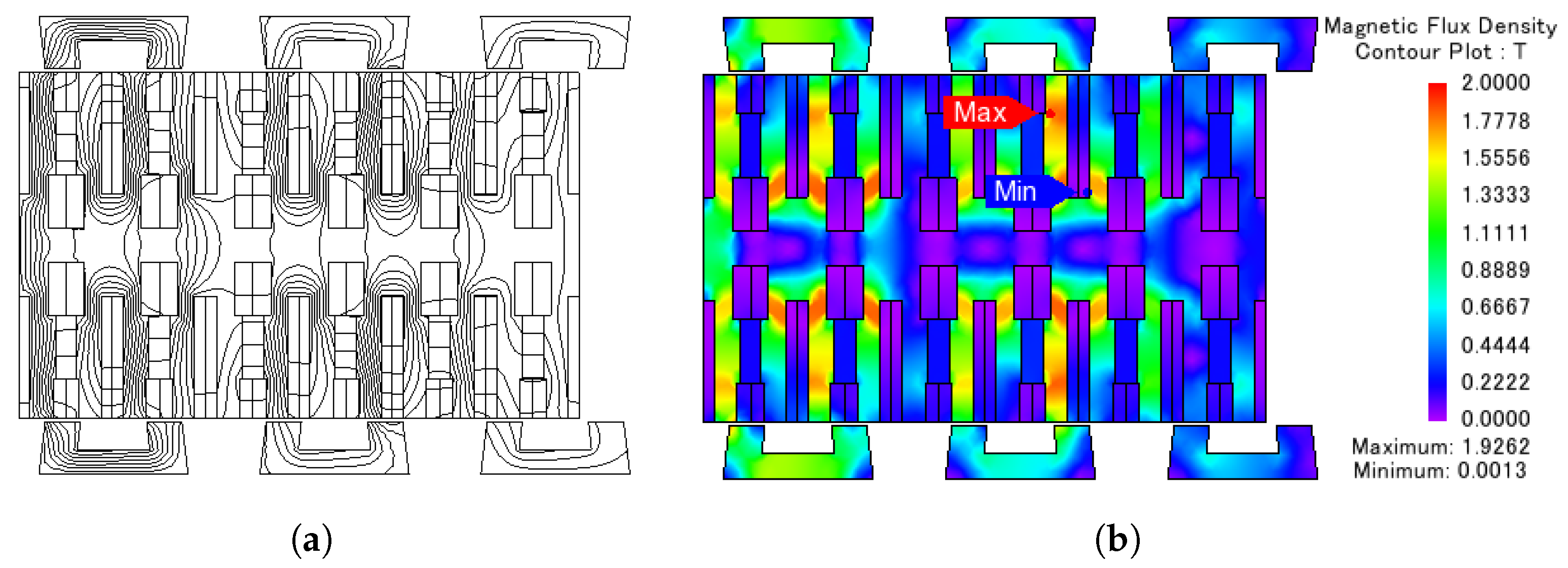
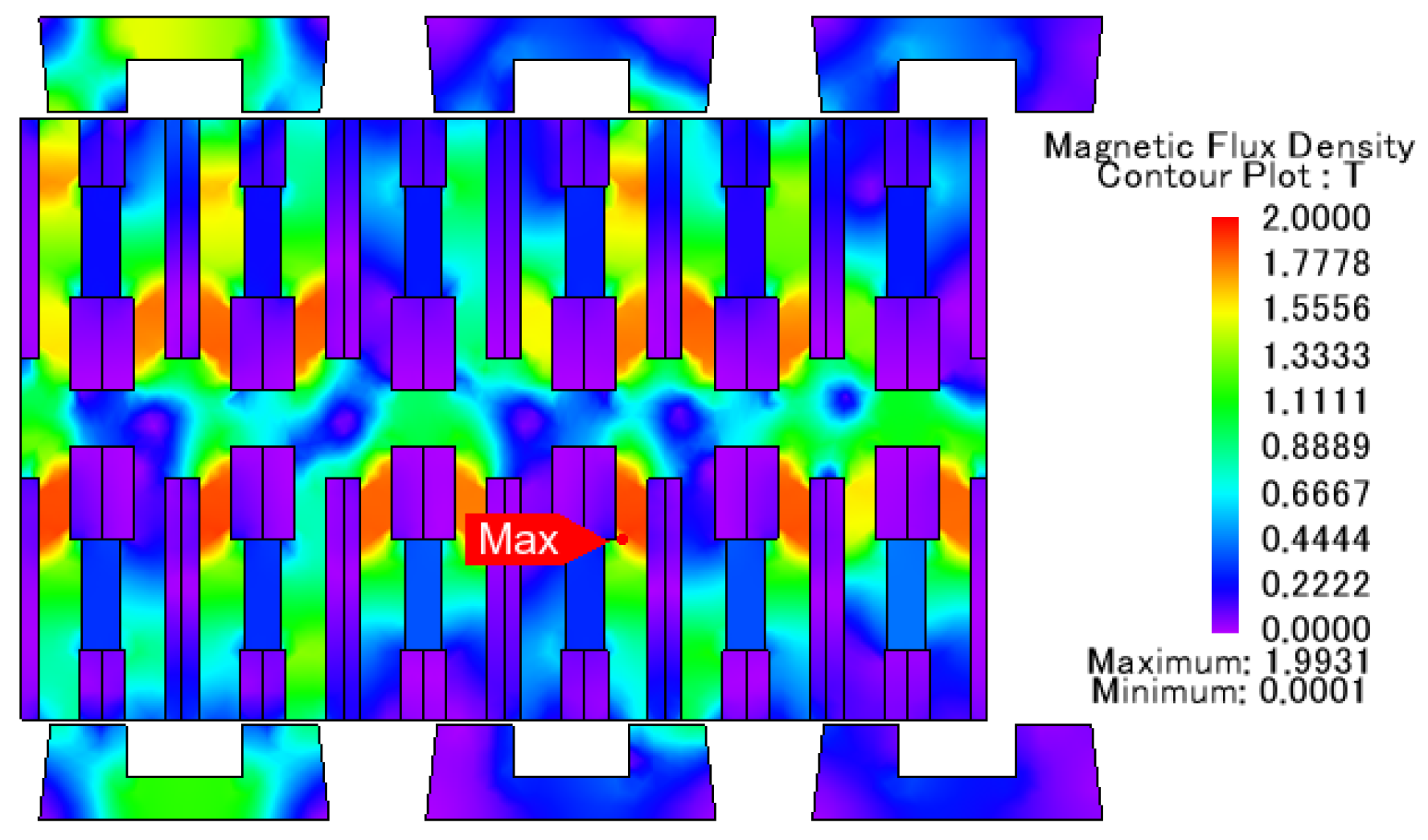
A nephogram represents the flux distribution of the machine in
Figure 24. It can be seen from
Figure 24 that flux is distributed uniformly over the whole machine, and only a significantly lower value of saturation can be observed. The maximum flux density observed in the stator is 1.3 T, while the mover is 1.7 T.


 ,
, 










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}