
A Distributed Hierarchical Control Framework for Economic Dispatch and Frequency Regulation of Autonomous AC Microgrids






Abstract
:1. Introduction
Motivation and Major Contributions of the Article
- A fully distributed hierarchical control framework is formulated for droop-controlled autonomous AC microgrids that guarantees coordinated operation of the three constituent control layers: droop-based primary control, distributed secondary active power and frequency control, and distributed tertiary control for the optimal active power dispatch.
- The suggested scheme operates with a distributed leaderless consensus at both the secondary and tertiary control layers, without needing a leader node to coordinate the functions of the other (i.e., follower) nodes. Consequently, it is not susceptible to single point of failure issue. Since the computational and communication effort is equally distributed among the distributed controllers of DGUs, it is fully distributed in this manner. It is reliable as well as flexible than the contemporary distributed [25,26,27] and conventional centralized control strategies.
- The proposed control framework is tested under plug-and-play event of DGUs and under load perturbations. It is found to dispatch load economically along with regulating frequencies of DGUs to the reference value.
- The microgrid simulation testbed used in this work possesses both low-inertia (converter-interfaced)-type and high-inertia (rotating)-type DGUs. On the other hand, the contemporary articles [26,27,31,32,33] are focused only on the low-inertia-type DGUs. Since, the dynamic response of the high-inertia-type DGUs is slower (due to speed governor) than the low-inertia-type DGUs [36], hence, it becomes a challenging task to formulate a distributed hierarchical control strategy for a microgrid with DGUs that have heterogeneous dynamics, and coordinate their operations successfully. This article addresses this issue.
2. Graph Theory
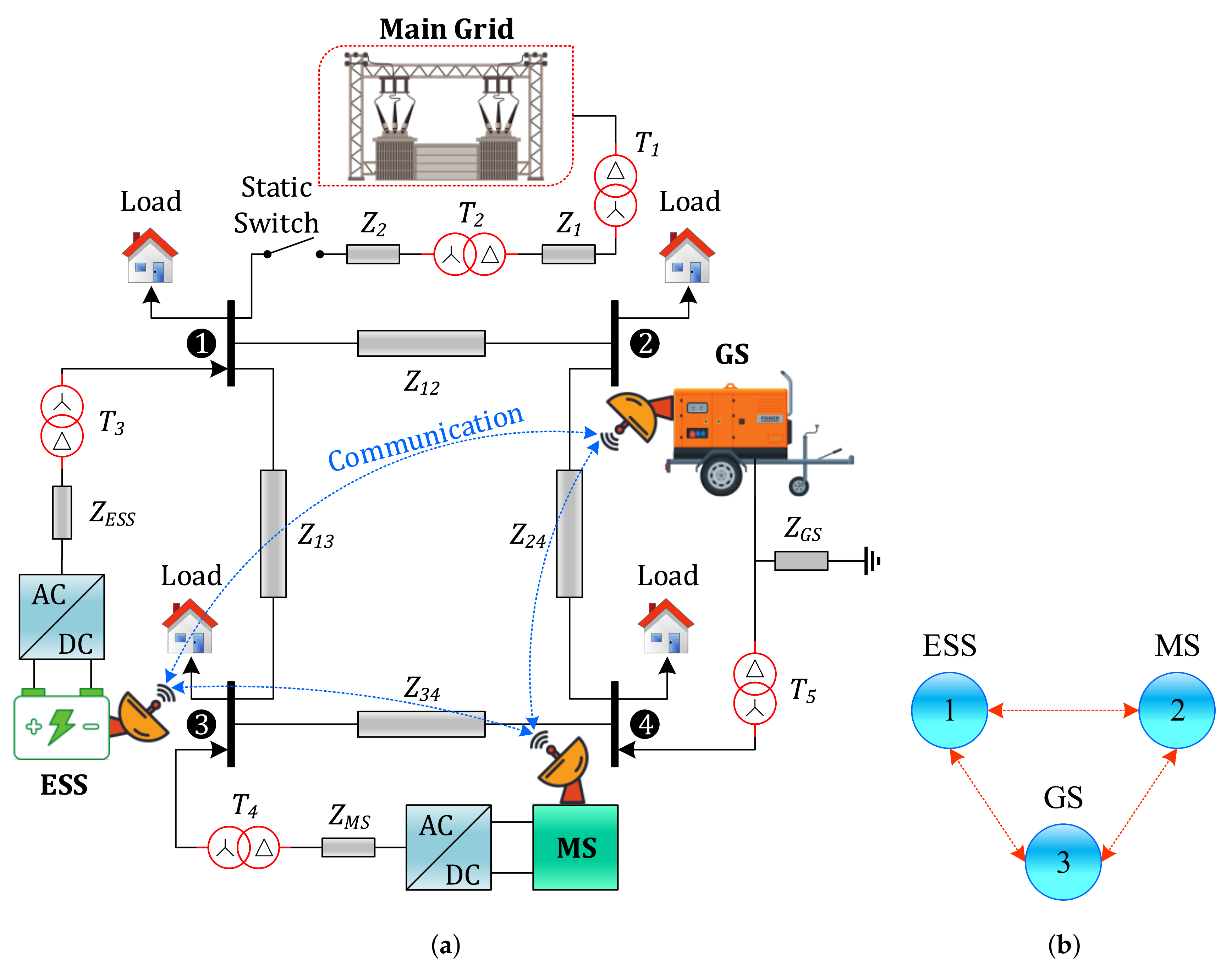
3. Simulation Testbed Configuration
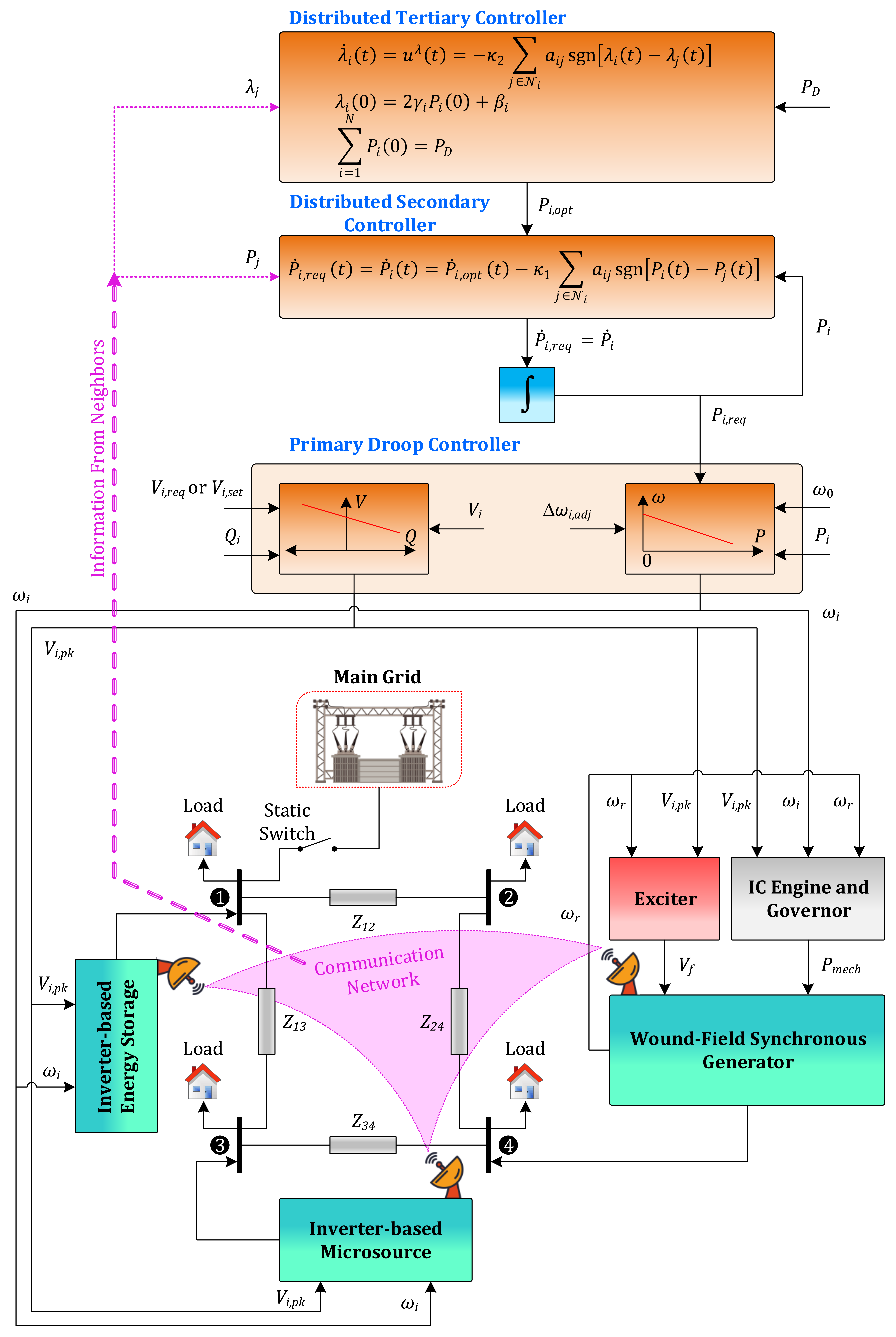
4. Proposed Distributed Hierarchical Control Framework
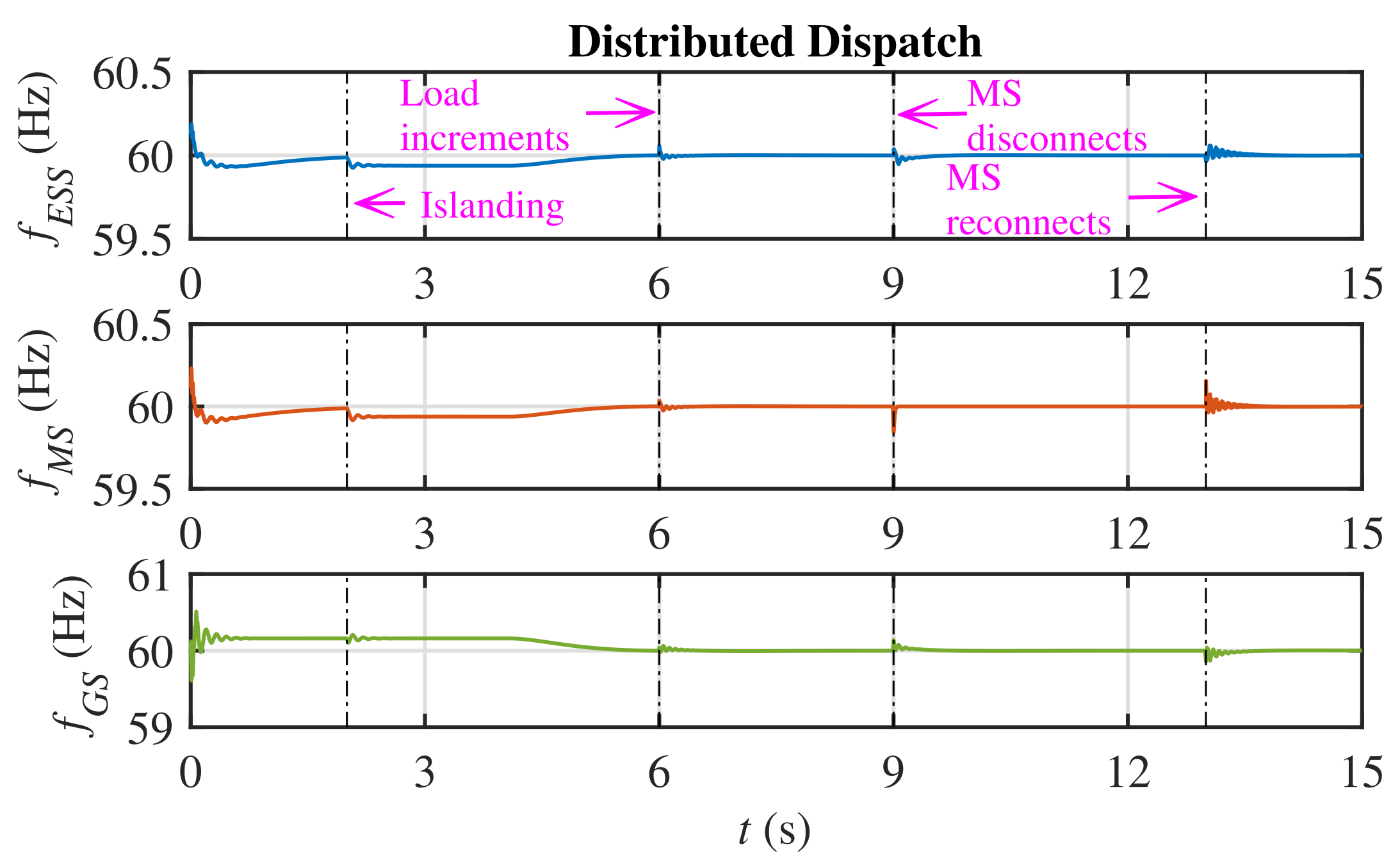
- Subsequent to islanding, restore the frequency of each DGU to the microgrid reference frequency, , despite load perturbations
- To ensure plug-and-play operation for DGUs
- To dispatch the load economically with a negligible power mismatch
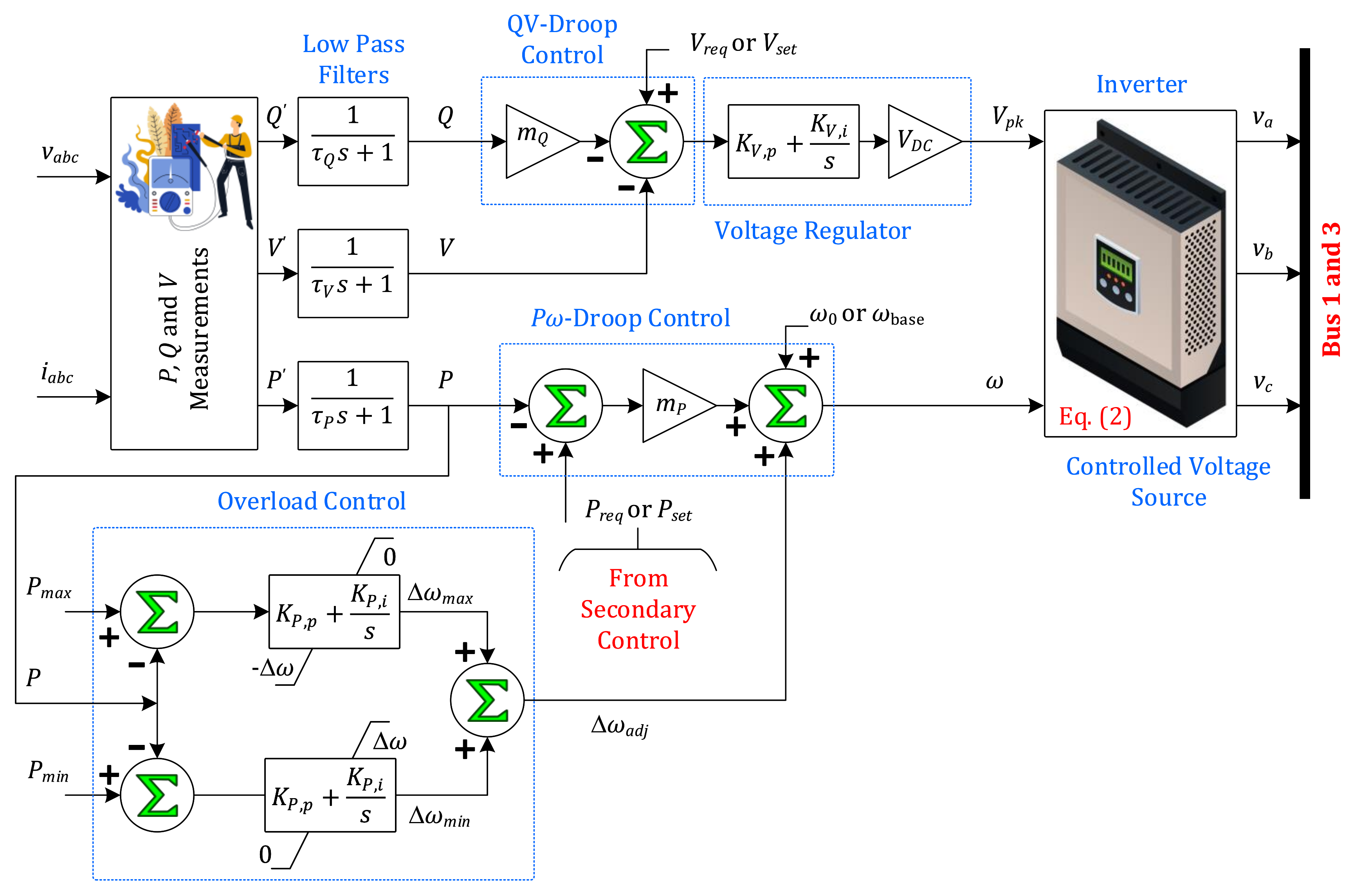
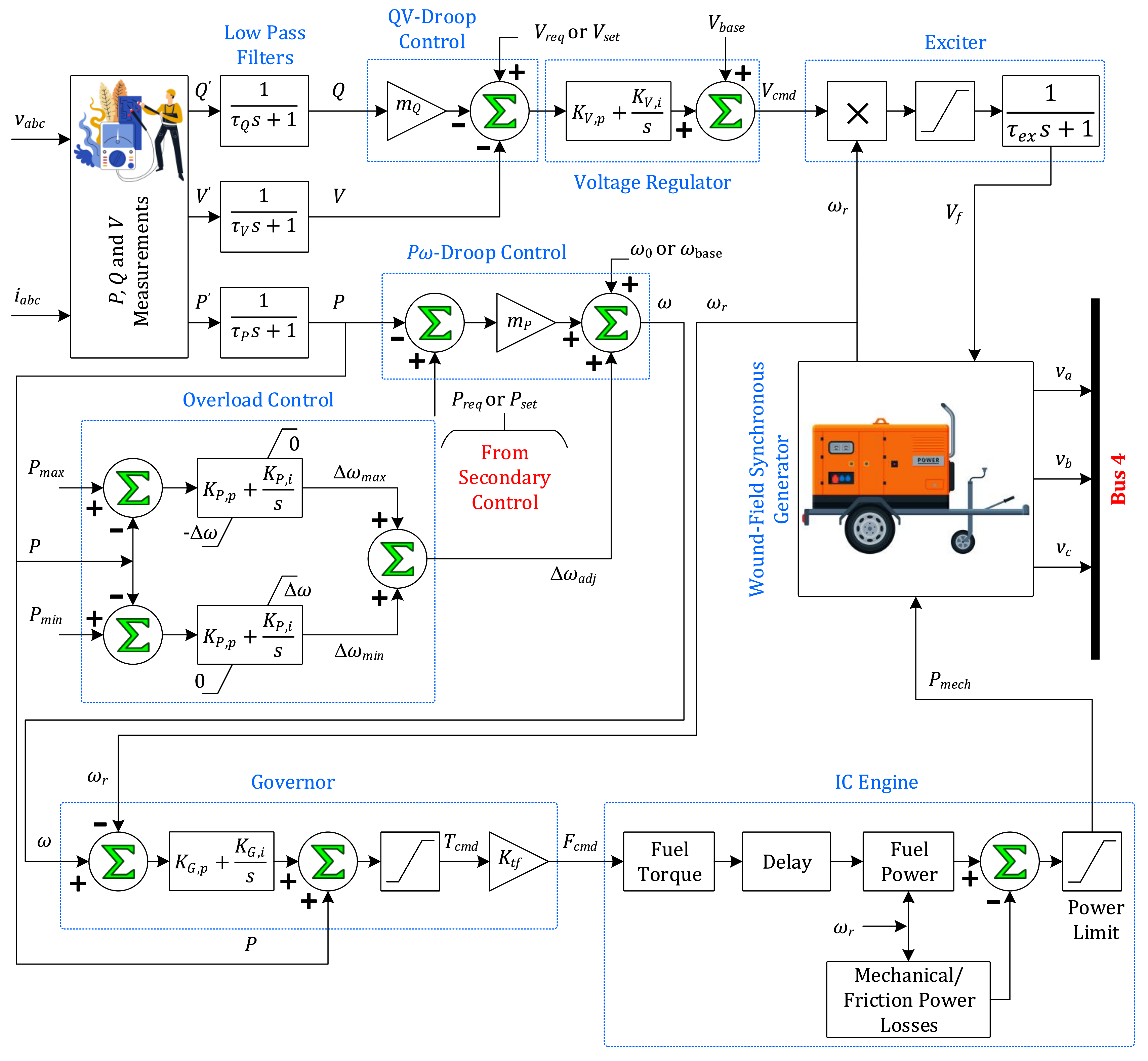
4.1. Primary Control Level
4.2. Secondary Control Level
Convergence Analysis of the Distributed Secondary Controller
4.3. Tertiary Control Level
4.3.1. Centralized Tertiary Controller—Centralized Economic Load Dispatch
4.3.2. Distributed Tertiary Controller—Distributed Economic Load Dispatch
4.3.3. Convergence Analysis of the Distributed Tertiary Controller
- The Laplacian matrix, L, is positive semi-definite, and , and
- Suppose be the second smallest eigenvalue of the Laplacian matrix, L. Now, if , then .
5. Numerical Simulation Results and Discussion
- Case·1:
- Performance assessment of the proposed hierarchical control framework for distributed economic load dispatch
- Case 2:
- Comparison with the centralized economic load dispatch
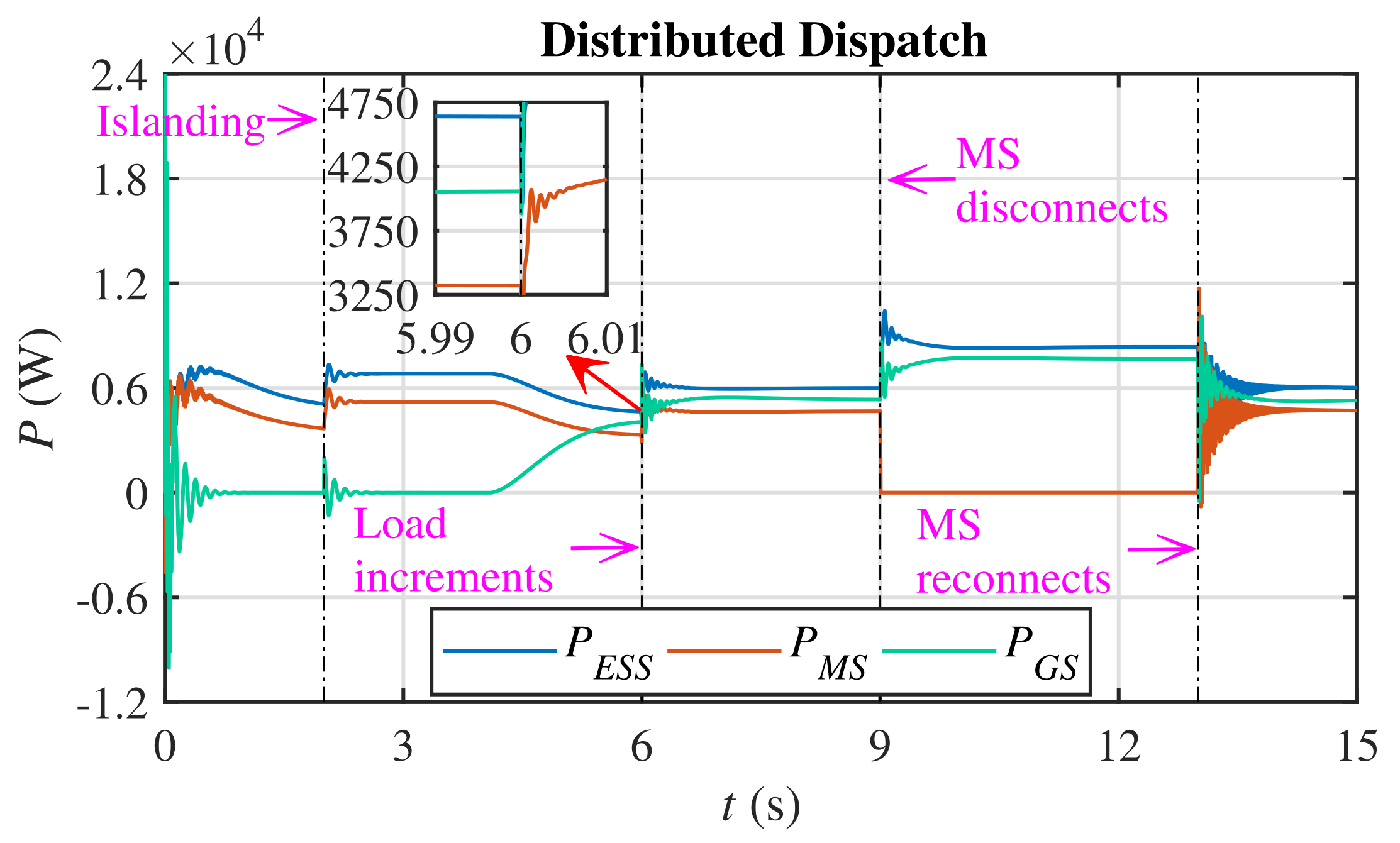
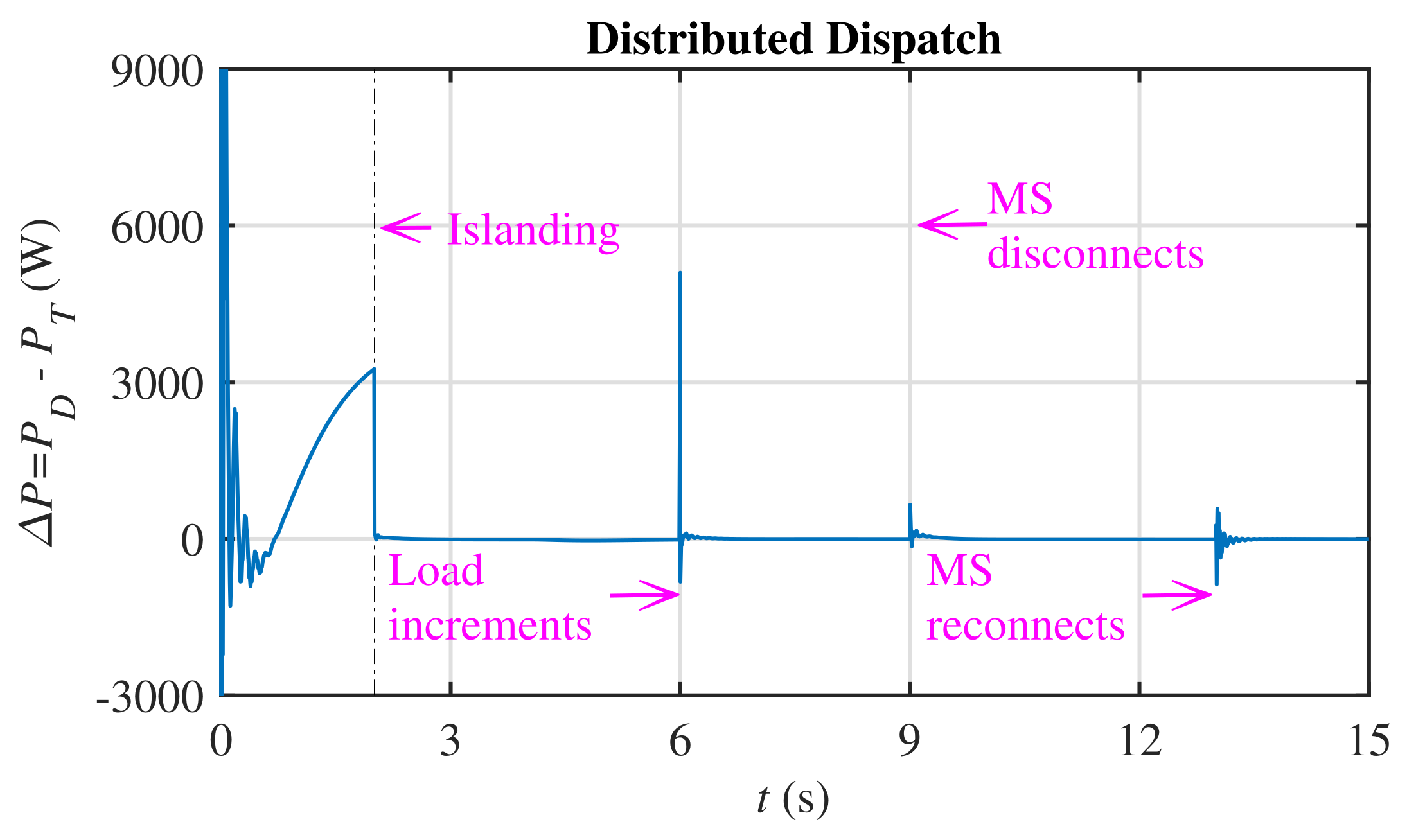
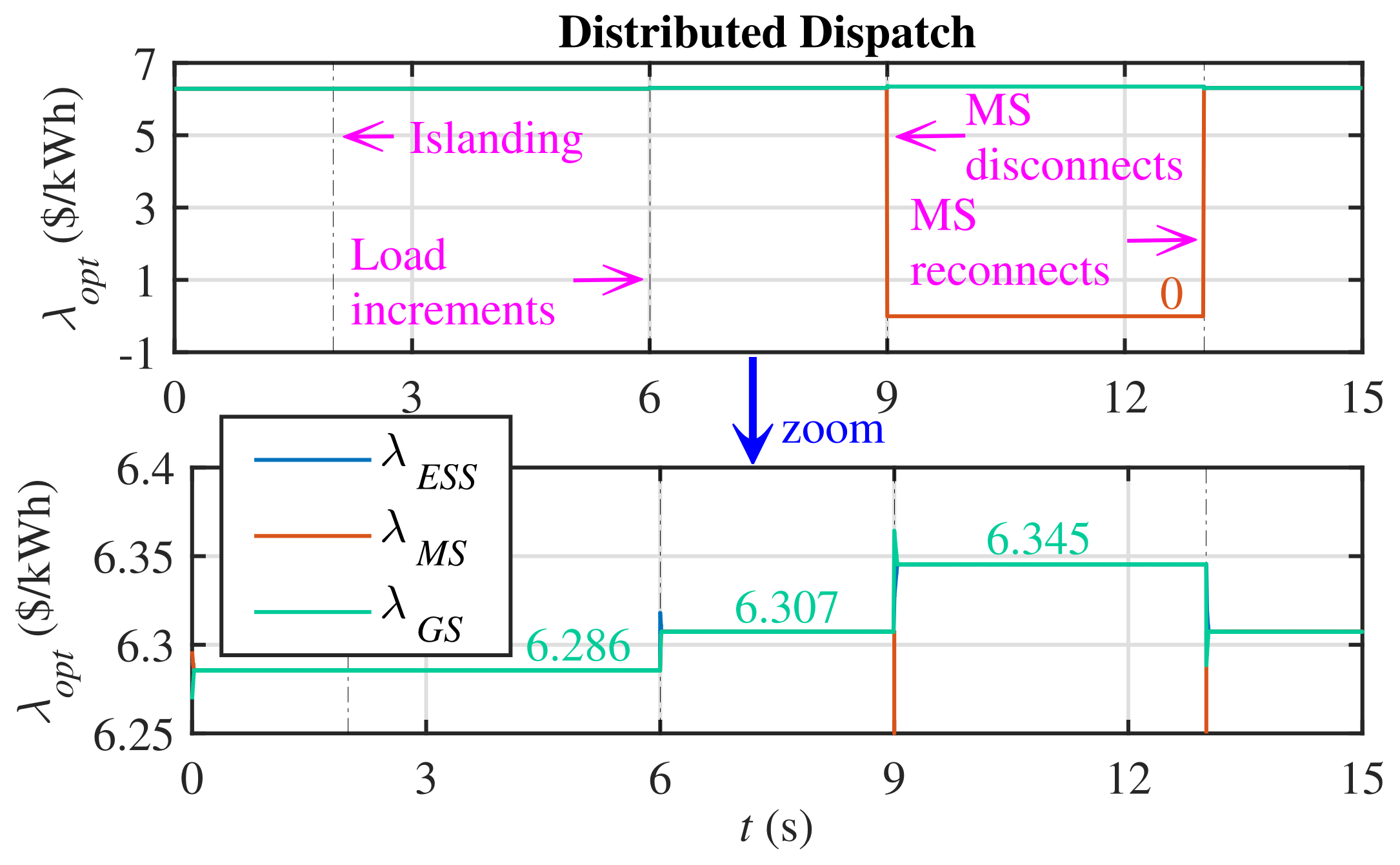
5.1. Case 1: Performance Assessment of the Proposed Hierarchical Control Framework for Distributed Economic Load Dispatch
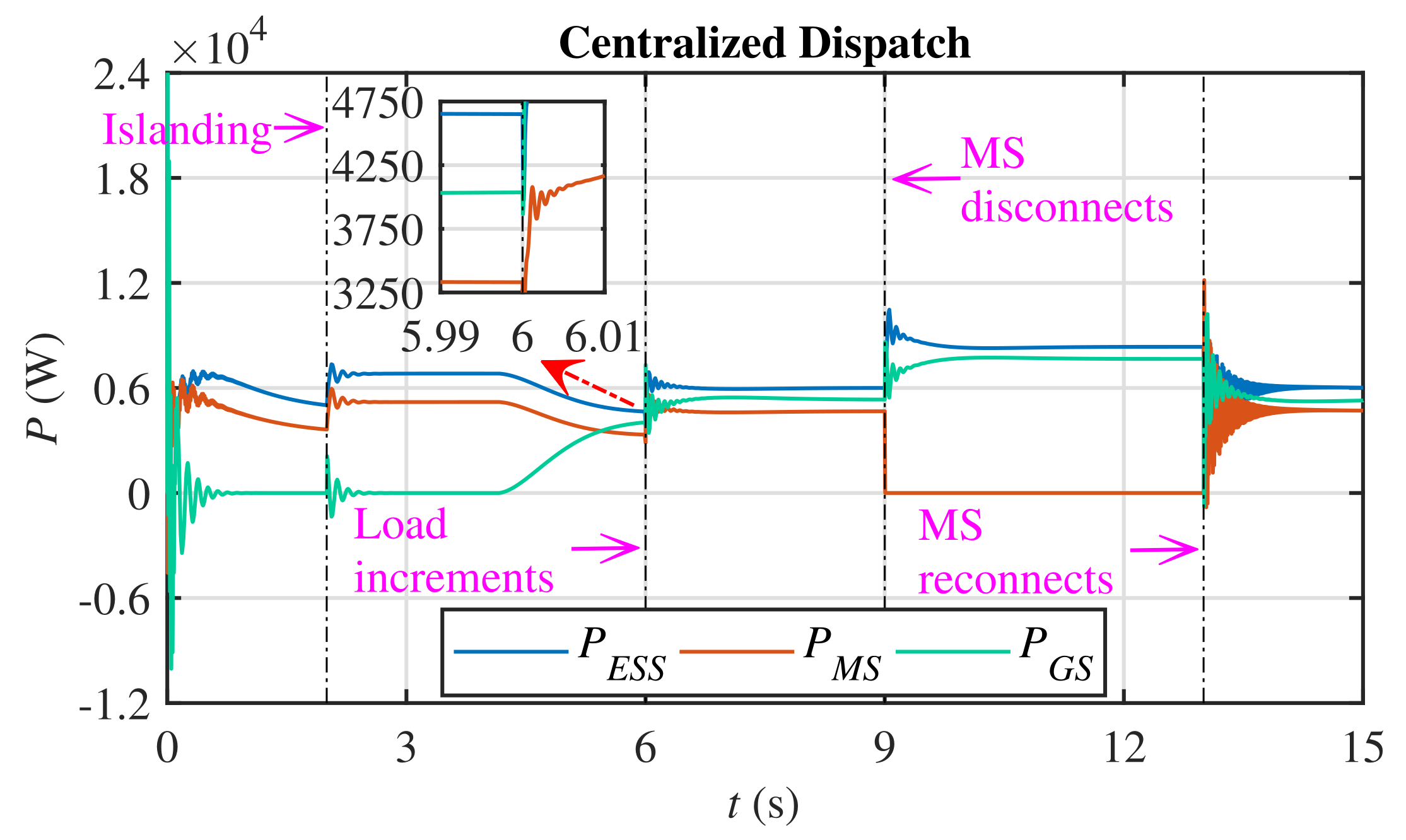
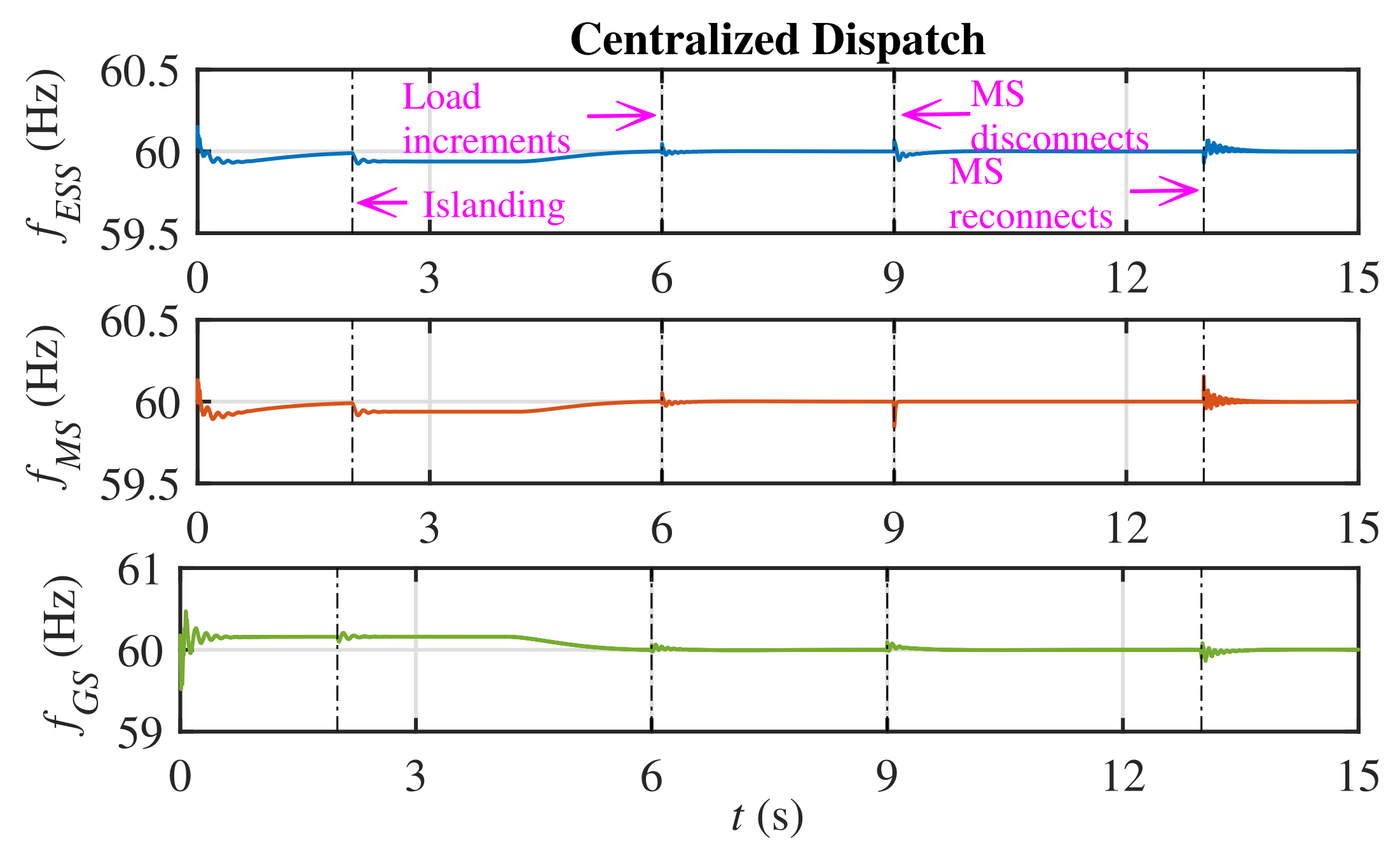
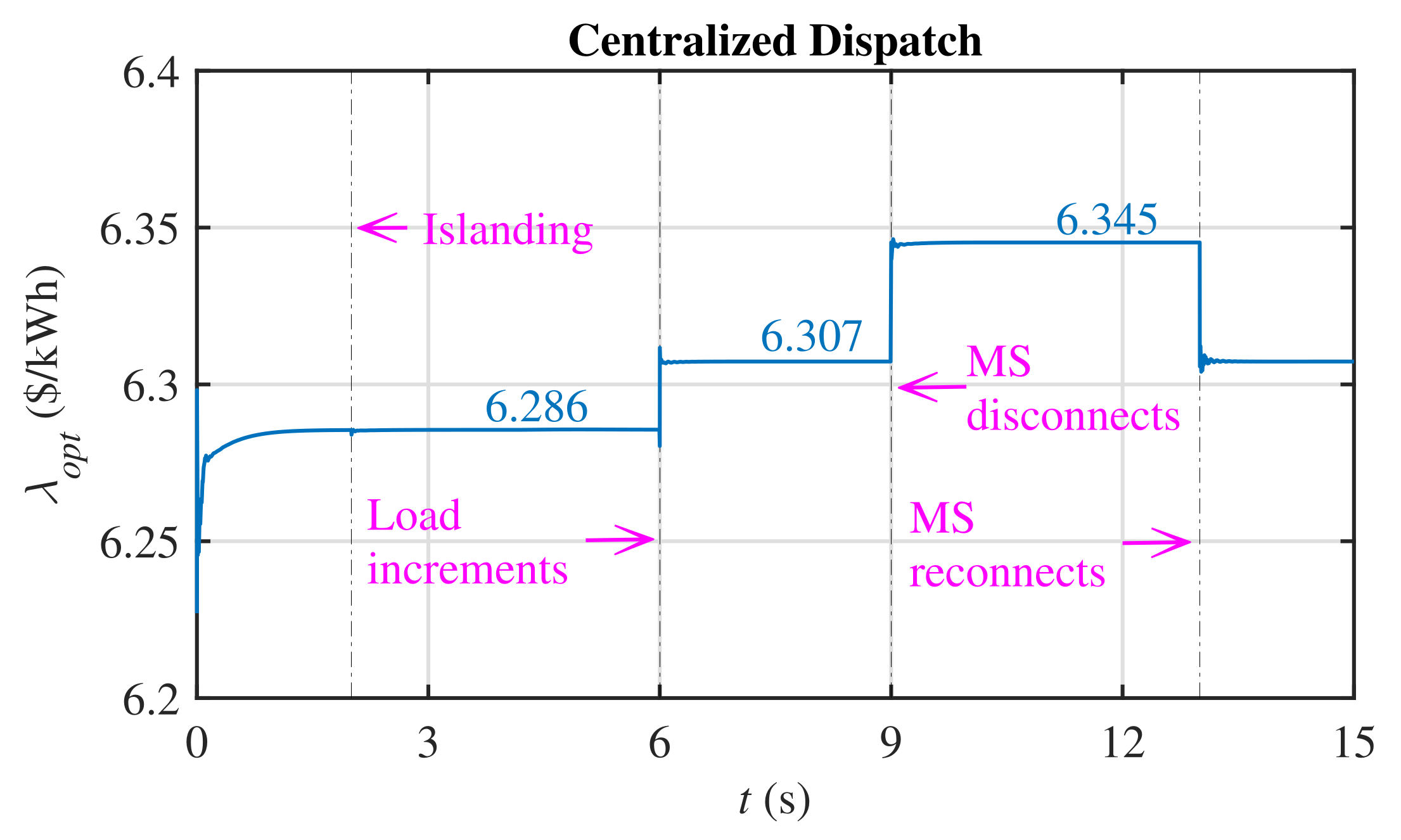
5.2. Case 2: Comparison with the Centralized Economic Load Dispatch
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Entire System Parameters

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Line Impedances | |||
|---|---|---|---|
| 0.0934 | 0.0255 | 2894.30 | |
| 0.00281 | 0.000679 | 2894.30 | |
| 0 | 3.77 | 0 | |
| 0 | 3.77 | 0 | |
| 0 | 0 | 26.53 | |
| 0.027352 | 0.0066 | 288.60 | |
| 0.0137 | 0.0033 | 577.20 | |
| 0.01688 | 0.00407 | 336.70 | |
| 0.0026 | 0.00064 | 2020.10 |
| TAG | Rating (kVA) | Frequency (Hz) | Primary Winding Specifications | Secondary Winding Specifications | ||||
|---|---|---|---|---|---|---|---|---|
| 2500 | 60 | 4160 | 0.04706 | 0.1882 | 480 | 0.000627 | 0.0025068 | |
| 75 | 60 | 480 | 0.0169 | 0.0676 | 208 | 0.0003 | 0.0127 | |
| 45 | 60 | 208 | 0.02688 | 0.1075 | 208 | 0.005047 | 0.0201 | |
| 45 | 60 | 208 | 0.02688 | 0.1075 | 208 | 0.005047 | 0.0201 | |
| 45 | 60 | 208 | 0.02688 | 0.1075 | 208 | 0.005047 | 0.0201 | |
| MS Specifications | ESS Specifications | ||
|---|---|---|---|
| Quantity | Value | Quantity | Value |
| 15 | 15 | ||
| 208 | 208 | ||
| 750 | 750 | ||
| 60 | 60 | ||
| 377 / | 377 / | ||
| / | / | ||
| 0 | |||
| 3 | 3 | ||
| 30 | 30 | ||
| 0.01 | 0.01 | ||
| 5 | 5 | ||
| 2.6928 | |||
| 0.05 | 0.05 | ||
| ICE-Based Diesel Genset Specifications | |||
|---|---|---|---|
| Quantity | Value | Quantity | Value |
| 0.53301 | |||
| 208 | 0.051 | ||
| 60 | 0.037 | ||
| 0.35523 | |||
| 377 / | 0.00015 | ||
| / | 0.0067 | ||
| 0.0217 pu | |||
| 0 | 0.1901 | ||
| p | 2 | ||
| 3 | 10 | ||
| 30 | 20 | ||
| 1000 | 0.625 | ||
| 10 | 11.8238 | ||
| 3600 | |||
| 0.05 | 0.47 | ||
| 1.204 | 0.36 | ||
| 0.125 | |||
| 0.056 | ... | ... | |
References
- Lasseter, B. Microgrids [distributed power generation]. In Proceedings of the 2001 IEEE Power Engineering Society Winter Meeting (Conference Proceedings (Cat. No.01CH37194)), Columbus, OH, USA, 28 January–1 February 2001; pp. 146–149. [Google Scholar]
- Lasseter, R.H. Microgrids. In Proceedings of the 2002 IEEE Power Engineering Society Winter Meeting (Conference Proceedings (Cat. No.02CH37309)), New York, NY, USA, 27–31 January 2002; pp. 305–308. [Google Scholar]
- Lasseter, R.H.; Piagi, P. Microgrid: A conceptual solution. In Proceedings of the 2004 IEEE 35th Annual Power Electronics Specialists Conference (IEEE Cat. No. 04CH37551), Aachen, Germany, 20–25 June 2004; pp. 4285–4290. [Google Scholar]
- Shi, W.; Li, N.; Chu, C.-C.; Gadh, R. Real-time energy management in microgrids. IEEE Trans. Smart Grid 2017, 8, 228–238. [Google Scholar] [CrossRef]
- Dragicevic, T.; Wu, D.; Shafiee, Q.; Meng, L. Distributed and decentralized control architectures for converter-interfaced microgrids. Chin. J. Electr. Eng. 2017, 3, 41–52. [Google Scholar]
- Moayedi, S.; Davoudi, A. Distributed tertiary control of DC microgrid clusters. IEEE Trans. Power Electron. 2017, 31, 1717–1733. [Google Scholar] [CrossRef]
- United States Environmental Protection Agency. Distributed Generation of Electricity and Its Environmental Impacts. Available online: https://www.epa.gov/energy/distributed-generation-electricity-and-its-environmental-impacts (accessed on 22 June 2021).
- Farrokhabadi, M.; Cañizares, C.A.; Simpson-Porco, J.W.; Nasr, E.; Fan, L. Microgrid stability definitions, analysis, and examples. IEEE Trans. Power Syst. 2019, 35, 13–29. [Google Scholar] [CrossRef]
- IEEE 2030.7-2017—IEEE Standard for the Specification of Microgrid Controllers. Available online: https://ieeexplore.ieee.org/document/8340204 (accessed on 22 June 2021).
- Bidram, A.; Davoudi, A. Hierarchical structure of microgrids control system. IEEE Trans. Smart Grid 2012, 3, 1963–1976. [Google Scholar] [CrossRef]
- Bidram, A.; Lewis, F.L.; Davoudi, A. Distributed control systems for small-scale power networks: Using multiagent cooperative control theory. IEEE Control Syst. Mag. 2014, 34, 56–77. [Google Scholar]
- Pilloni, A.; Pisano, A.; Usai, E. Robust finite-time frequency and voltage restoration of inverter-based microgrids via sliding-mode cooperative control. IEEE Trans. Ind. Electron. 2017, 65, 907–917. [Google Scholar] [CrossRef]
- Bidram, A.; Davoudi, A.; Lewis, F.L.; Guerrero, J.M. Distributed cooperative secondary control of microgrids using feedback linearization. IEEE Trans. Power Syst. 2013, 28, 3462–3470. [Google Scholar] [CrossRef] [Green Version]
- Guerrero, J.M.; Chandorkar, M.; Lee, T.-L.; Loh, P.C. Advanced control architectures for intelligent microgrids—Part I: Decentralized and hierarchical control. IEEE Trans. Ind. Electron. 2012, 60, 1254–1262. [Google Scholar] [CrossRef] [Green Version]
- Baghaee, H.R.; Mirsalim, M.; Gharehpetian, G.B. Real-time verification of new controller to improve small/large-signal stability and fault ride-through capability of multi-DER microgrids. IET Gener. Transm. Distrib. 2016, 10, 3068–3084. [Google Scholar] [CrossRef]
- Madurai Elavarasan, R.; Pugazhendhi, R.; Irfan, M.; Mihet-Popa, L.; Campana, P.E.; Khan, I.A. A novel Sustainable Development Goal 7 composite index as the paradigm for energy sustainability assessment: A case study from Europe. Appl. Energy 2021, 118173, in press. [Google Scholar] [CrossRef]
- Madurai Elavarasan, R.; Leoponraj, S.; Dheeraj, A.; Irfan, M.; Gangaram Sundar, G.; Mahesh, G.K. PV-Diesel-Hydrogen fuel cell based grid connected configurations for an institutional building using BWM framework and cost optimization algorithm. Sustain. Energy Technol. Assess. 2021, 43, 100934. [Google Scholar] [CrossRef]
- Nuvvula, R.S.S.; Devaraj, E.; Madurai Elavarasan, R.; Iman Taheri, S.; Irfan, M.; Teegala, K.S. Multi-objective mutation-enabled adaptive local attractor quantum behaved particle swarm optimisation based optimal sizing of hybrid renewable energy system for smart cities in India. Sustain. Energy Technol. Assess. 2022, 49, 101689. [Google Scholar] [CrossRef]
- Dehkordi, N.M.; Sadati, N.; Hamzeh, M. Distributed robust finite-time secondary voltage and frequency control of islanded microgrids. IEEE Trans. Power Syst. 2016, 32, 3648–3659. [Google Scholar] [CrossRef]
- Irfan, M.; Elavarasan, R.M.; Hao, Y.; Feng, M.; Sailan, D. An assessment of consumers’ willingness to utilize solar energy in China: End-users’ perspective. J. Cleaner Prod. 2021, 292, 126008. [Google Scholar] [CrossRef]
- Irfan, M.; Hao, Y.; Ikram, M.; Wu, H.; Akram, R.; Rauf, A. Assessment of the public acceptance and utilization of renewable energy in Pakistan. Sustain. Prod. Consum. 2021, 27, 312–324. [Google Scholar] [CrossRef]
- Dehkordi, N.M.; Baghaee, H.R.; Sadati, N.; Guerrero, J.M. Distributed noise-resilient secondary voltage and frequency control for islanded microgrids. IEEE Trans. Smart Grid 2018, 10, 3780–3790. [Google Scholar] [CrossRef] [Green Version]
- Bidram, A.; Davoudi, A.; Lewis, F.L.; Ge, S.S. Distributed adaptive voltage control of inverter-based microgrids. IEEE Trans. Energy Convers. 2014, 29, 862–872. [Google Scholar] [CrossRef]
- Bidram, A.; Davoudi, A.; Lewis, F.L.; Qu, Z. Secondary control of microgrids based on distributed cooperative control of multi-agent systems. IET Gener. Transm. Distrib. 2013, 7, 822–831. [Google Scholar] [CrossRef] [Green Version]
- Hou, X.; Sun, Y.; Lu, J.; Zhang, X.; Koh, L.H.; Su, M.; Guerrero, J.M. Distributed hierarchical control of AC microgrid operating in grid-connected, islanded and their transition modes. IEEE Access 2018, 6, 77388–77401. [Google Scholar] [CrossRef]
- Rey, J.M.; Vergara, P.P.; Castilla, M.; Camacho, A.; Velasco, M.; Martí, P. Droop-free hierarchical control strategy for inverter-based AC microgrids. IET Power Electron. 2020, 13, 1403–1415. [Google Scholar] [CrossRef]
- Zhao, Z.; Yang, P.; Guerrero, J.M.; Xu, Z.; Green, T.C. Multiple-time-scales hierarchical frequency stability control strategy of medium-voltage isolated microgrid. IEEE Trans. Power Electron. 2016, 31, 5974–5991. [Google Scholar] [CrossRef]
- Mehmood, F.; Khan, B.; Ali, S. Renewable generation intermittence and economic dispatch control of autonomous microgrid with distributed sliding mode. Int. J. Electr. Power Energy Syst. 2021, 130, 106937. [Google Scholar] [CrossRef]
- Mehmood, F.; Khan, B.; Ali, S.M.; Rossiter, J.A. Distributed model predictive based secondary control for economic production and frequency regulation of MG. IET Control Theory Appl. 2019, 13, 2948–2958. [Google Scholar] [CrossRef]
- Mehmood, F.; Khan, B.; Ali, S.M.; Rossiter, J.A. Distributed MPC for economic dispatch and intermittence control of renewable based autonomous microgrid. Electr. Power Syst. Res. 2021, 195, 107131. [Google Scholar] [CrossRef]
- Wu, X.; Chen, L.; Shen, C.; Xu, Y.; He, J.; Fang, C. Distributed optimal operation of hierarchically controlled microgrids. ET Gener. Transm. Distrib. 2018, 12, 4142–4152. [Google Scholar] [CrossRef]
- Li, Z.; Cheng, Z.; Liang, J.; Si, J.; Dong, L.; Li, S. Distributed event-triggered secondary control for economic dispatch and frequency restoration control of droop-controlled AC microgrids. IEEE Trans. Sustain. Energy 2019, 11, 1938–1950. [Google Scholar] [CrossRef]
- Cheng, Z.; Li, Z.; Liang, J.; Si, J.; Dong, L.; Gao, J. Distributed coordination control strategy for multiple residential solar PV systems in distribution networks. Int. J. Electr. Power Energy Syst. 2020, 117, 105660. [Google Scholar] [CrossRef]
- Wang, Y.; Mondal, S.; Satpathi, K.; Xu, Y.; Dasgupta, S.; Gupta, A. Multi-Agent Distributed Power Management of DC Shipboard Power Systems for Optimal Fuel Efficiency. IIEEE Trans. Transp. Electrif. 2021, 7, 3050–3061. [Google Scholar] [CrossRef]
- Nguyen, T.L.; Wang, Y.; Tran, Q.T.; Caire, R.; Xu, Y.; Gavriluta, C. A Distributed Hierarchical control framework in Islanded microgrids and its agent-based design for cyber-physical implementations. IEEE Trans. Ind. Electron. 2021, 68, 9685–9695. [Google Scholar] [CrossRef]
- Dewadasa, M.; Ghosh, A.; Ledwich, G. Dynamic response of distributed generators in a hybrid microgrid. In Proceedings of the 2011 IEEE Power and Energy Society General Meeting, Detroit, MI, USA, 24–28 July 2011; pp. 1–8. [Google Scholar]
- Ullah, S.; Khan, L.; Sami, I.; Ullah, N. Consensus-Based Delay-Tolerant Distributed Secondary Control Strategy for Droop Controlled AC Microgrids. IEEE Access 2021, 9, 6033–6049. [Google Scholar] [CrossRef]
- Ullah, S.; Khan, L.; Badar, R.; Ullah, A.; Karam, F.W.; Khan, Z.A.; Rehman, A.U. Consensus based SoC trajectory tracking control design for economic-dispatched distributed battery energy storage system. PLoS ONE 2020, 15, e0232638. [Google Scholar] [CrossRef] [PubMed]
- Erickson, M.J.; Lasseter, R.H. Integration of battery energy storage element in a CERTS microgrid. In Proceedings of the 2010 IEEE Energy Conversion Congress and Exposition, Atlanta, GA, USA, 12–16 September 2010; pp. 2570–2577. [Google Scholar]
- Lasseter, R.H.; Piagi, P. Control and Design of Microgrid Components; Power Systems Engineering Research Center (PSERC), University of Wisconsin-Madison: Madison, WI, USA, 2006. Available online: https://certs.lbl.gov/sites/all/files/ctrl-design-microgrid-components.pdf (accessed on 20 October 2020).
- Ullah, S.; Khan, L.; Jamil, M.; Jafar, M.; Mumtaz, S.; Ahmad, S. A Finite-Time Robust Distributed Cooperative Secondary Control Protocol for Droop-Based Islanded AC Microgrids. Energies 2021, 14, 2936. [Google Scholar] [CrossRef]
- Chen, F.; Cao, Y.; Ren, W. Distributed average tracking of multiple time-varying reference signals with bounded derivatives. IEEE Trans. Autom. Control 2012, 57, 3169–3174. [Google Scholar] [CrossRef]
- Cortes, J. Discontinuous dynamical systems. IEEE Control Syst. Mag. 2008, 28, 36–73. [Google Scholar]
- Saadat, H. Power System Analysis, 3rd ed.; PSA Publishing: Williamsport, PA, USA, 2010. [Google Scholar]
- Wood, A.J.; Wollenberg, B.F.; Sheblé, G.B. Power Generation, Operation, and Control; Wiley: Hoboken, NJ, USA, 2013. [Google Scholar]
- Liu, X.; Lam, J.; Yu, W.; Chen, G. Finite-time consensus of multiagent systems with a switching protocol. IEEE Trans. Neural Netw. Learn. Syst. 2015, 27, 853–862. [Google Scholar] [CrossRef]
- Zuo, Z.; Tie, L. Distributed robust finite-time nonlinear consensus protocols for multi-agent systems. Int. J. Syst. Sci. 2016, 47, 1366–1375. [Google Scholar] [CrossRef]
- Zhang, H.; Lewis, F.L.; Qu, Z. Lyapunov, adaptive, and optimal design techniques for cooperative systems on directed communication graphs. IEEE Trans. Ind. Electron. 2012, 59, 3026–3041. [Google Scholar] [CrossRef]
- Bhat, S.P.; Bernstein, D.S. Finite-time stability of continuous autonomous systems. SIAM J. Control Optim. 2000, 38, 751–766. [Google Scholar] [CrossRef]





| DGU Index (i) | Name of DGU | |||||
|---|---|---|---|---|---|---|
| 1 | ESS | 180 | 6.21 | 0.0081 | 0 | 15 |
| 2 | MS | 200 | 6.23 | 0.0083 | 0 | 15 |
| 3 | GS | 190 | 6.22 | 0.0082 | 0 | 12.50 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ullah, S.; Khan, L.; Sami, I.; Hafeez, G.; Albogamy, F.R. A Distributed Hierarchical Control Framework for Economic Dispatch and Frequency Regulation of Autonomous AC Microgrids. Energies 2021, 14, 8408. https://doi.org/10.3390/en14248408
Ullah S, Khan L, Sami I, Hafeez G, Albogamy FR. A Distributed Hierarchical Control Framework for Economic Dispatch and Frequency Regulation of Autonomous AC Microgrids. Energies. 2021; 14(24):8408. https://doi.org/10.3390/en14248408
Chicago/Turabian StyleUllah, Shafaat, Laiq Khan, Irfan Sami, Ghulam Hafeez, and Fahad R. Albogamy. 2021. "A Distributed Hierarchical Control Framework for Economic Dispatch and Frequency Regulation of Autonomous AC Microgrids" Energies 14, no. 24: 8408. https://doi.org/10.3390/en14248408
APA StyleUllah, S., Khan, L., Sami, I., Hafeez, G., & Albogamy, F. R. (2021). A Distributed Hierarchical Control Framework for Economic Dispatch and Frequency Regulation of Autonomous AC Microgrids. Energies, 14(24), 8408. https://doi.org/10.3390/en14248408