
PV-Supercapacitor Cascaded Topology for Primary Frequency Responses and Dynamic Inertia Emulation


Abstract
:
1. Introduction
- Topological innovation: The proposed “PV-SC Series Cascade Topology” represents a pioneering approach to interface a low-voltage SC to a medium-/high-voltage PVS, which, unlike its counterparts, eliminates the need for a high gain complex isolated converter for the SC Power-Processing Stage (SC-PPS).
- Innovation in Control: Firstly, the proposed “Droop Inspired” method offers a means of emulating dynamic inertia as a function RoCoF. The target is to serve a wider range of RoCoF with a limited storage. Secondly, the novel single PI controller-based decoupling method effectively segregates the control of two-level SC-PPS in order to operate the SC as a voltage source rather than as a current source. A combined control scheme is also used to address both the SIR and the PFR.
- Innovation in methodology for sizing: A very simple approach is proposed for the sizing of the SC and its PPS using a novel “Three Point Linearization” method for the PFR and the “Droop Inspired” method for the SIR.
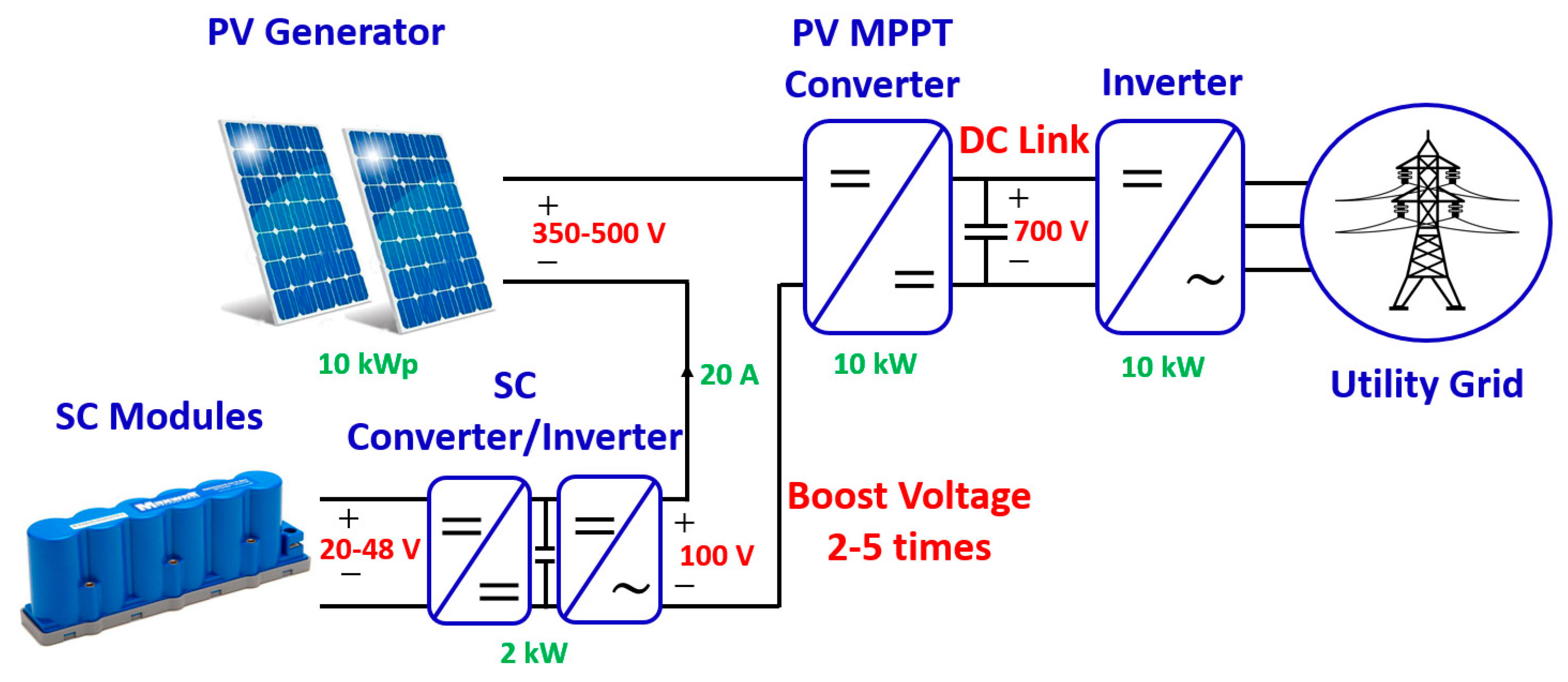
2. Proposed PV-SC Series Cascaded Topology
2.1. System under Consideration
2.2. Merits and Limitations of the Proposed PSCT in Terms of Fault Tolerance
- Fault-tolerant capabilities:
- As with other cascaded topologies, the proposed configuration is also prone to short circuit faults. However, a proper current regulation technique can set a current limit in the inner current loop control of the SC-PPS. Fortunately, as the PV array operates directly in series with the output port of the SC-PPS, any current beyond the short circuit current rating of the PV array will shift the PV characteristics to second quadrant, and thus, will activate the bypass diodes of the PV modules to save it from possible damage.
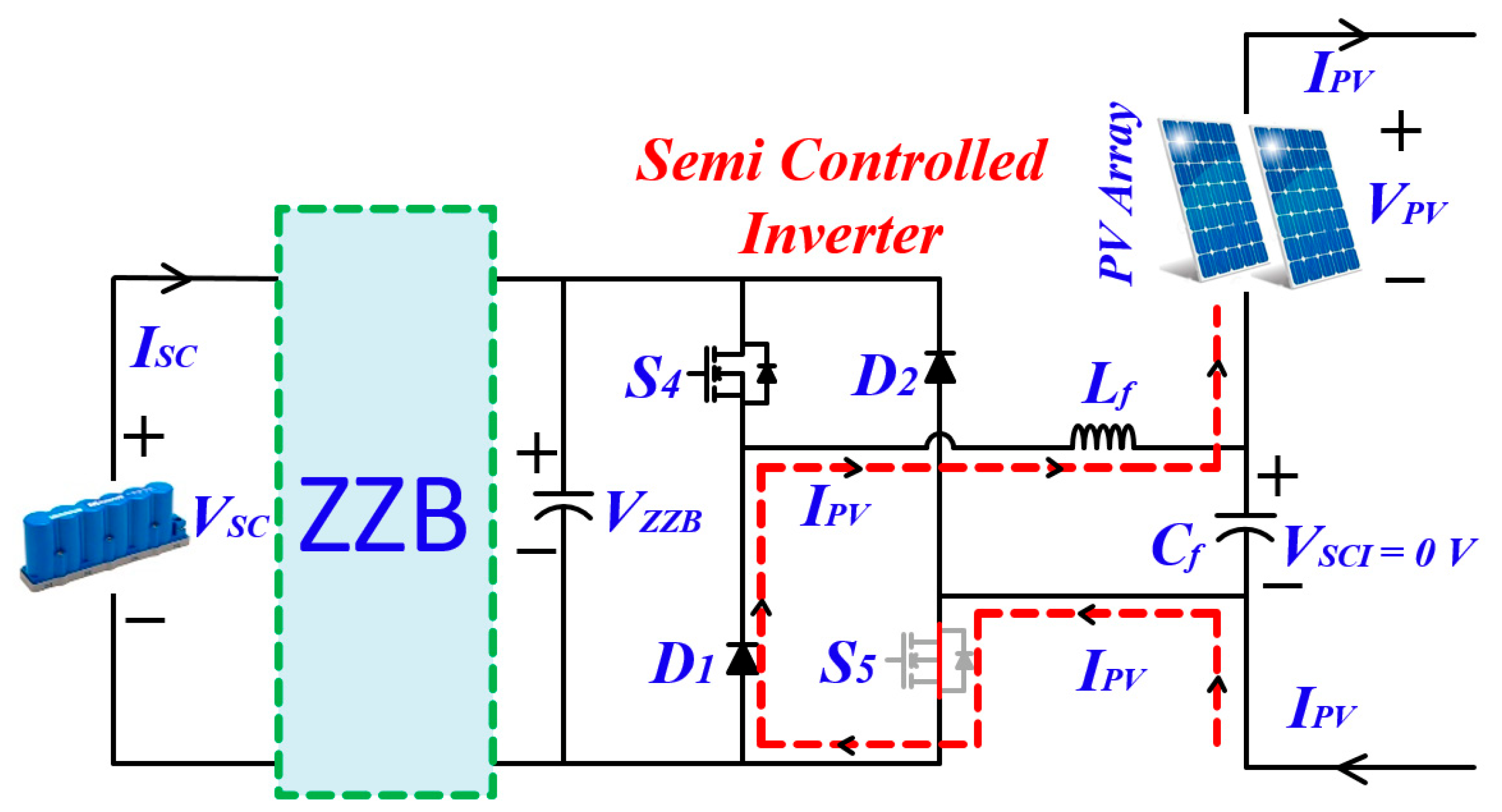
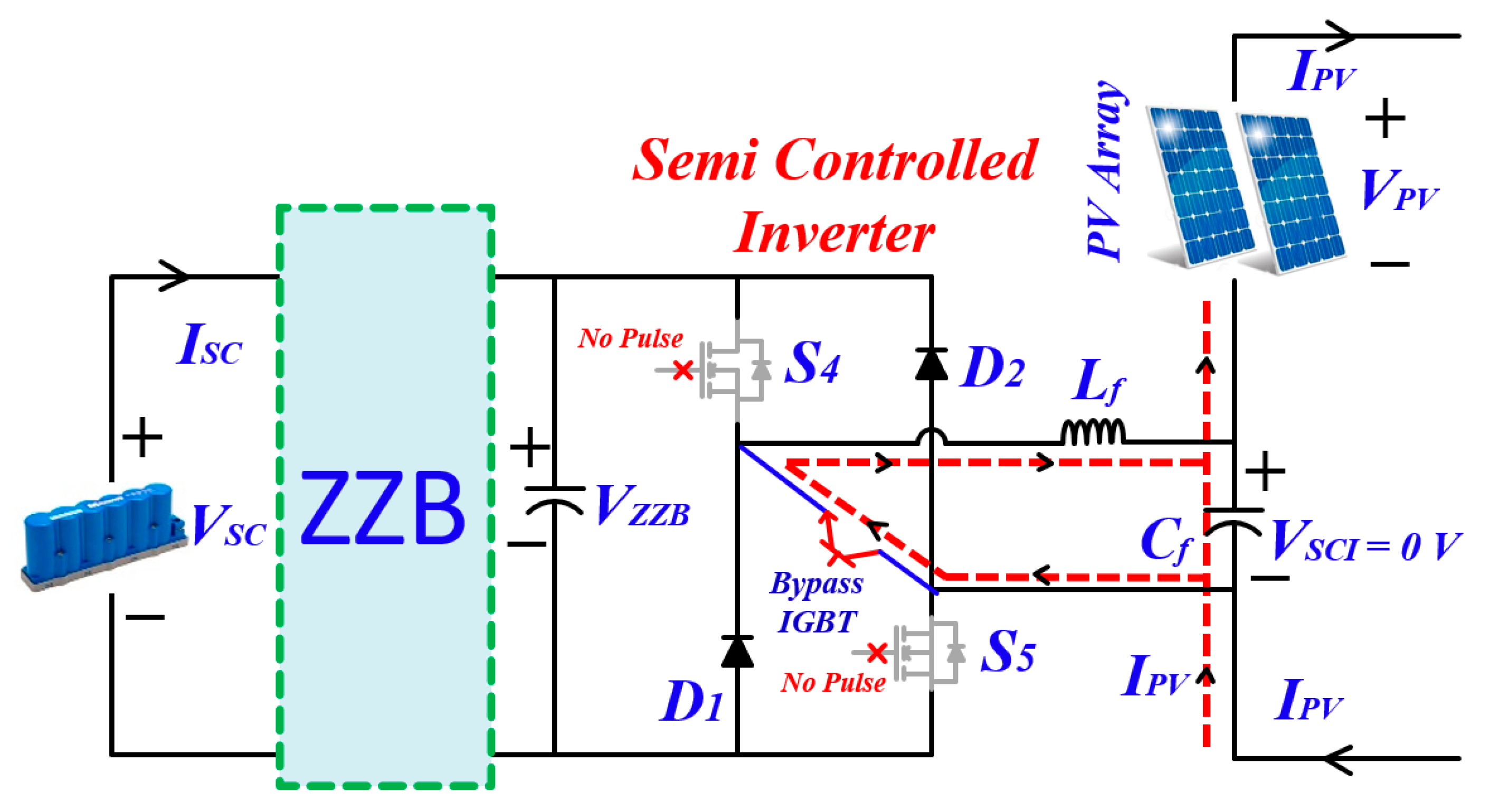
- Secondly, the proposed topology has an inherent bypassing capability in case there is a fault in the Semi-Controlled Inverter (SCI) stage of the SC-PPS (if any of the switches are damaged/shorted due to multiple reasons). In such cases, the shorted switch will bring the output LC filter of SCI into a parallel arrangement and then into series with the PV. Thus, the DC nature the PV current will simply bypass the SC-PPS stage directly through the filter inductor of the SCI, setting the voltage output of SCI to zero, as shown in Figure 7, for cases in which only S5 is shorted. A similar response can be expected if either only S4, or both of the switches, are shorted. This inherent feature makes it superior over the conventional cascaded topologies, as there is no hindrance of the PV MPPT operation during the occurrence of faults in the SC-PPS.
- Limitations and possible solutions (if any):
- There may be a chance of an over-voltage fault in the SC-PPS if any one switch (or both of the switches) of the SCI stops obtaining the gate pulses due to a fault in the driver circuit of the switches. This may lead to a high negative voltage continuously building at the output of both of the SC-PPSs due to the positive PV current. A proper over-voltage detection scheme can detect the fault, if one is indeed present, and the SC-PPS stage can be bypassed with a unidirectional switch (IGBT) at the input port of the LC filter of the SCI, as shown in Figure 8. This will gradually discharge the energy stored in the LC circuit and eventually bypass the SC-PPS without hampering the PV MPPT operation. Alternatively, the simplest approach may involve shutting down the entire system to rectify the fault before undertaking reinstallation. However, a more detailed analysis is indeed required to further explore the open-circuit fault-tolerant capability of the proposed system.
- During periods in which there are no frequency events, the SCI stage always remains active (to regulate the output voltage of the SCI to zero) even though there is no active power dealt by the SC (only circulating current flow between the switches and the output LC filter of the SCI). This will lead to some additional running losses. Nonetheless, the similar bypass arrangement, as discussed in the last point, can also improve the efficiency when at an ideal level.
- Additionally, due to the cascade connection, when the PV output will be zero and/or during night-time, it will hardly be possible to achieve frequency response services. This is the most common problem in all cascaded-type topologies; however, this may not be an issue for conventional parallel-type configurations.
- Merits over parallel-type configurations:Although having few limitations, the following few points make the proposed topology promising over the existing parallel-type configurations.
- Firstly, unlike parallel-type configurations, the proposed PSCT demands simple low-gain interfacing converters for the SC stage.
- Secondly, unlike the parallel-type configuration, the SC can be deep-discharged due to the limitation in the input voltage variation for the interfacing converter. This feature makes it superior to the parallel-type configuration as it has the potential to improve the utilization factor of the stored energy of the SC to a large extent.
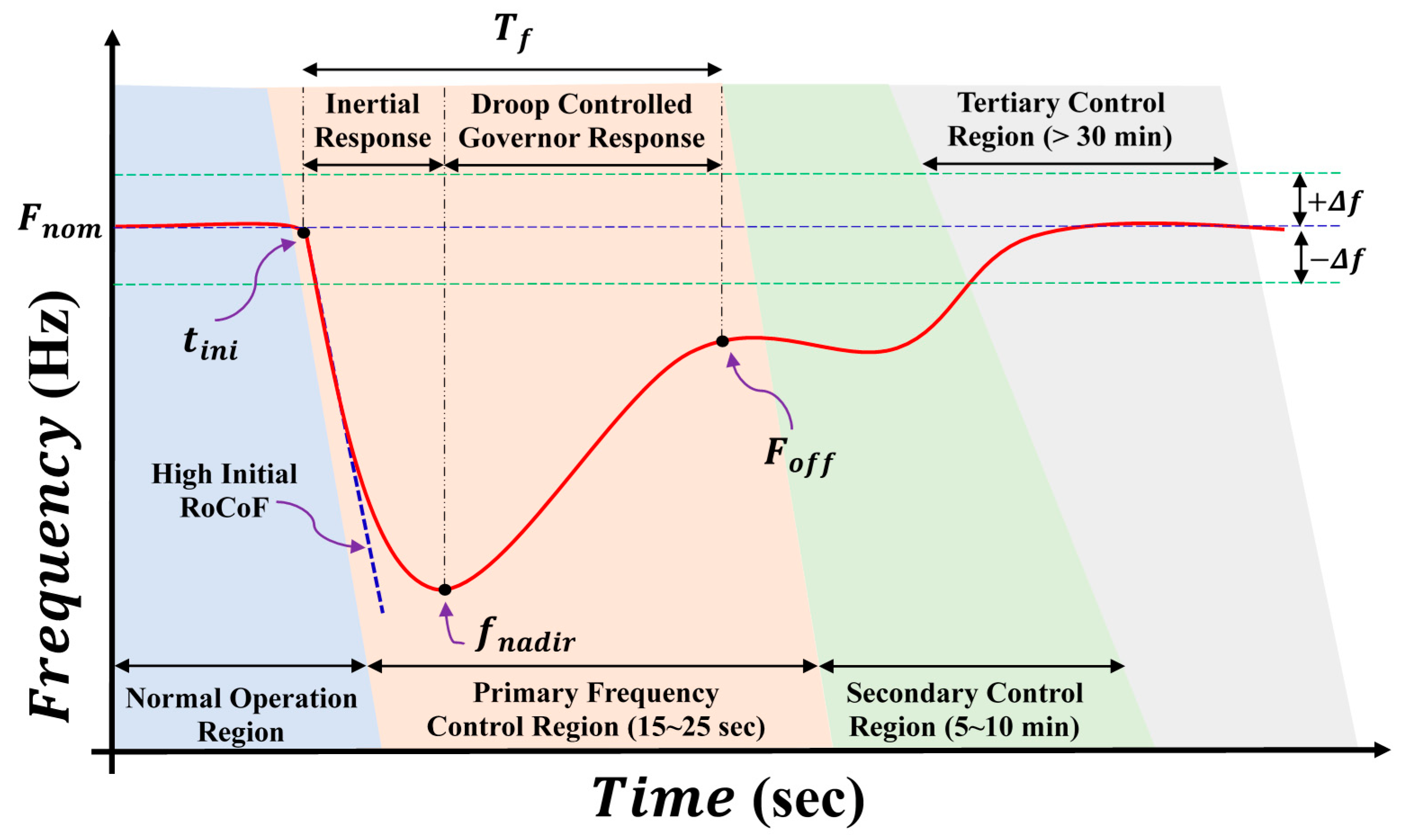
3. Frequency Response Services in PVS and the Proposed DI Dynamic Inertia Emulation
3.1. Rate of Change of Frequency (RoCoF) Response
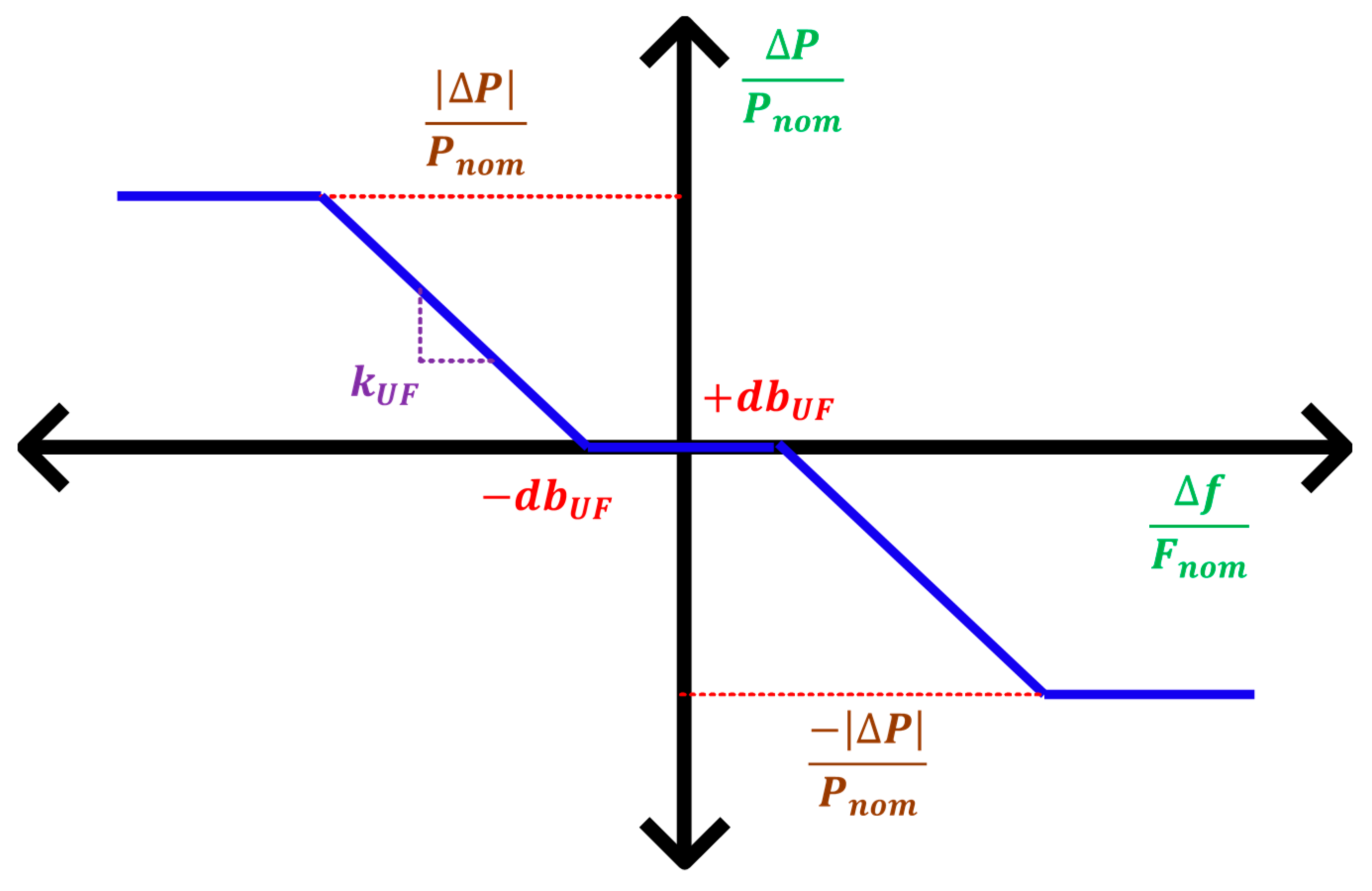
3.2. Primary Frequency Response and Frequency-Droop (Frequency-Power) Capability of the DERs
- is the total active power output in the PU of the DER nameplate active power rating during the PFR event.
- is the pre-disturbance power of the DER in the PU at the moment after the frequency crosses the dead band.
- is available active power in the PU of the DER rating.
- is the instantaneous system frequency.
- corresponds to dead band of the droop control, and stands for the droop coefficient under-frequency events.
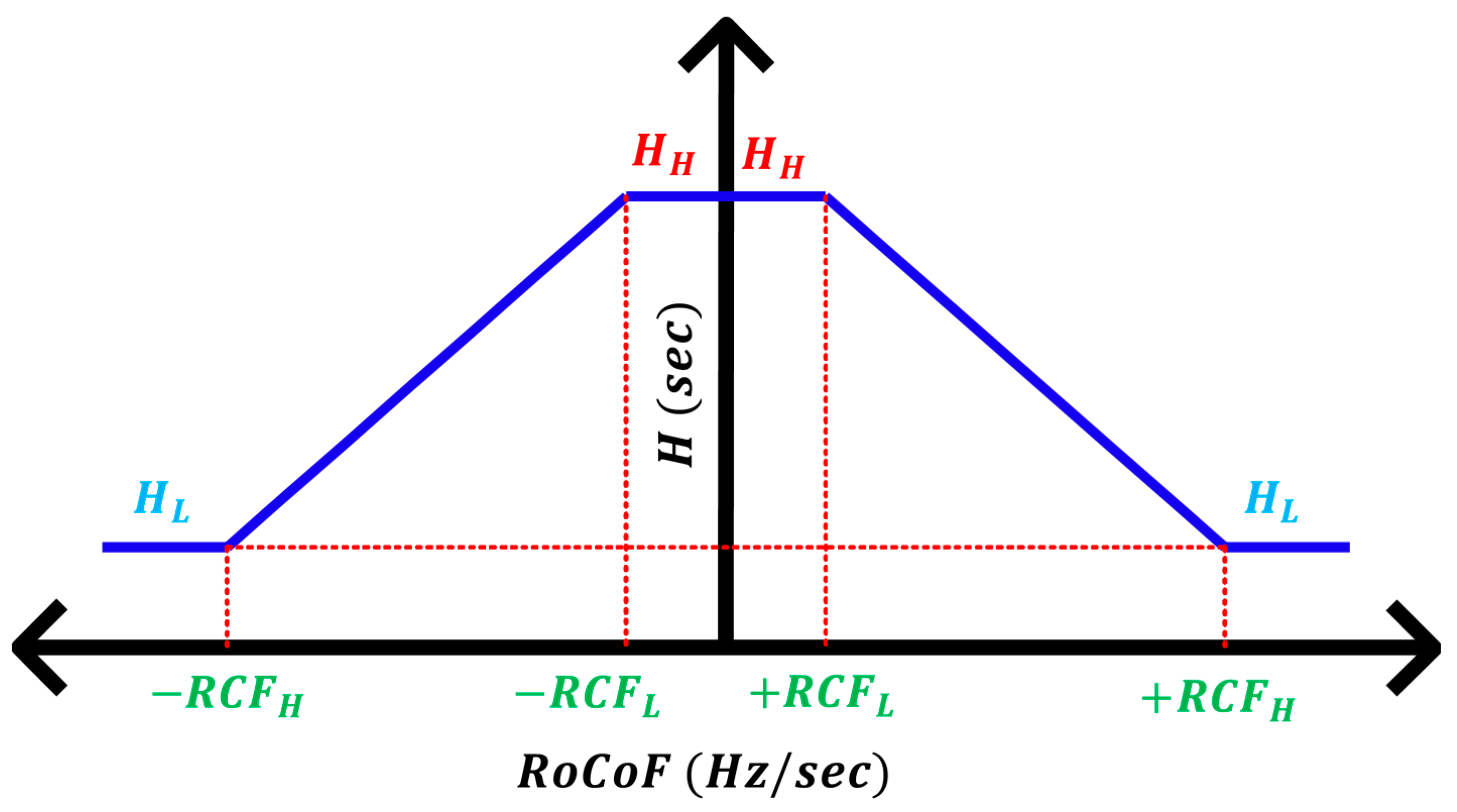
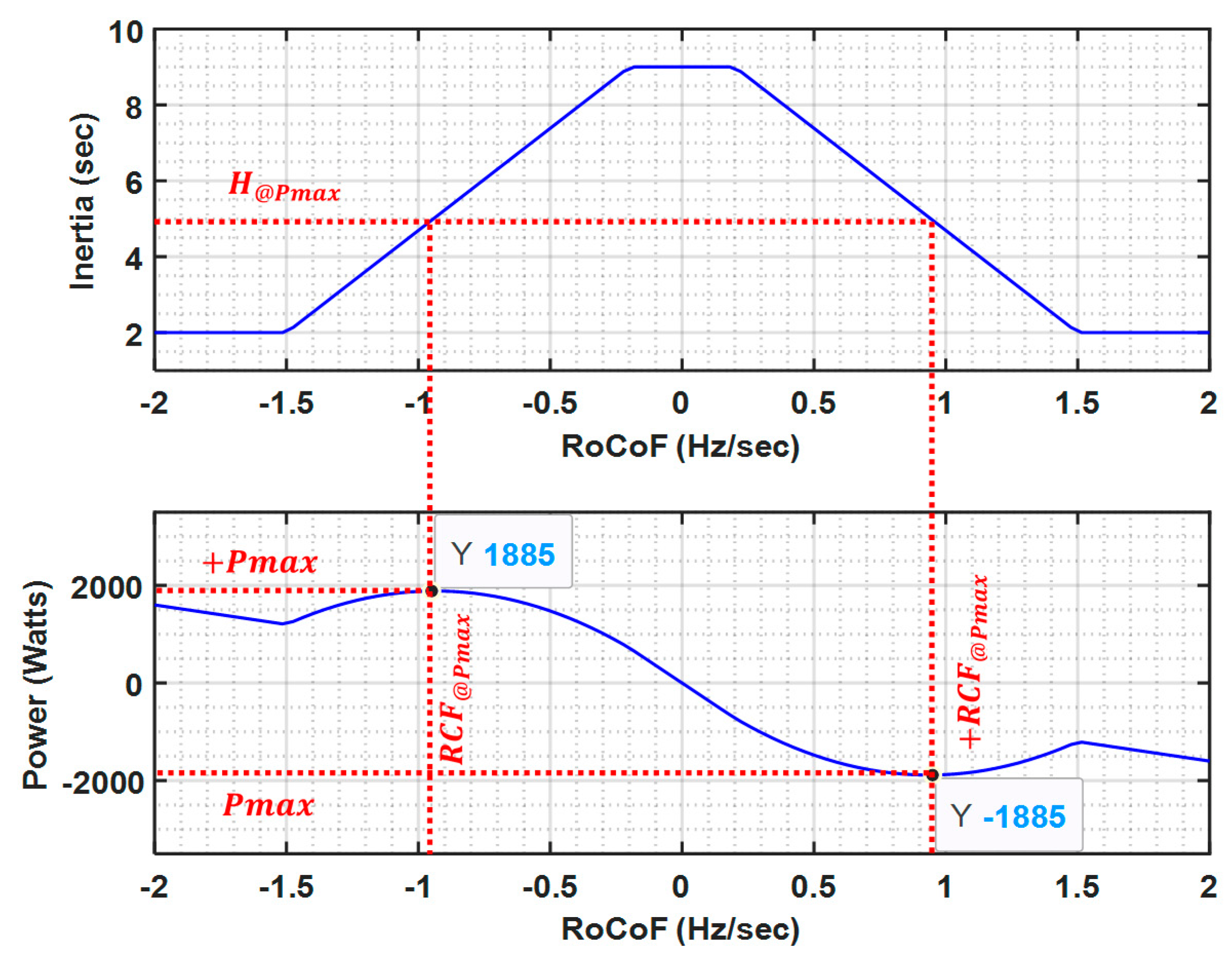
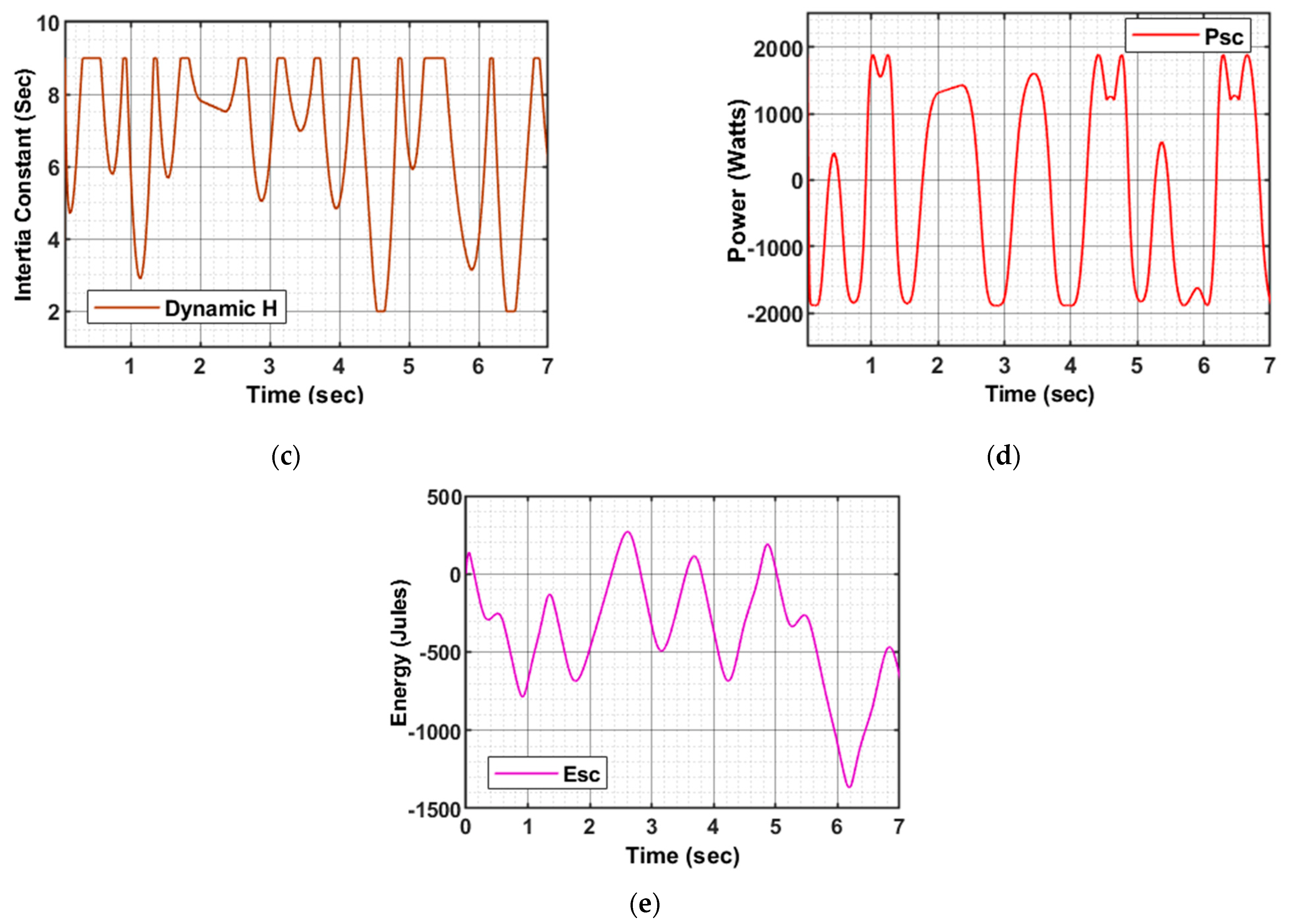
3.3. Proposed Dynamic Inertia Emulation Based on Droop-Inspired Method for PVS
- 1.
- The conventional constant inertia-based approach (a narrow range of RoCoF will be serviced):
- During low-RoCoF periods, the reference power and energy demanded by the control are proportionately less and, hence, are dealt by the storage. This underutilizes the storage although it is capable enough of dealing with more power and energy. Thus, smaller disturbances may lead to larger frequency fluctuation, making the system less robust.
- On the contrary, during high-RoCoF periods, the maximum RoCoF that can be addressed is also limited to the storage capability as the corresponding power and energy demands are high for the same inertia constant.
- 2.
- The proposed adjustable inertia-based approach (capable of addressing a wider range of RoCoF values with limited storage capability compared to its conventional counterparts):
- During low-RoCoF periods, the proposed method helps in emulating comparatively larger inertia than that of the Synchronous Machines in terms of scale (such as: thermal generators, pumped storage types, open cycle gas turbines, etc. [4]). Thus, it utilizes the storage capability to a large extent, allowing the storage to deal with more power and energy fluctuation (but within the limits of its capability). This will help in curbing the frequency fluctuation at the root level itself. Thus, an extreme frequency fluctuation and, in turn, an anticipated grid failure can be avoided.
- However, we cannot expect similar performance (larger inertia emulation) during high-RoCoF periods as it will ultimately demand larger storage size. Thus, the control is designed in such a way that it ensures minimum inertia (not less than that of the class of synchronous generators with the lowest inertia-emulating capabilities such as: hydro turbines and combined cycle-type generating stations etc. [4]).
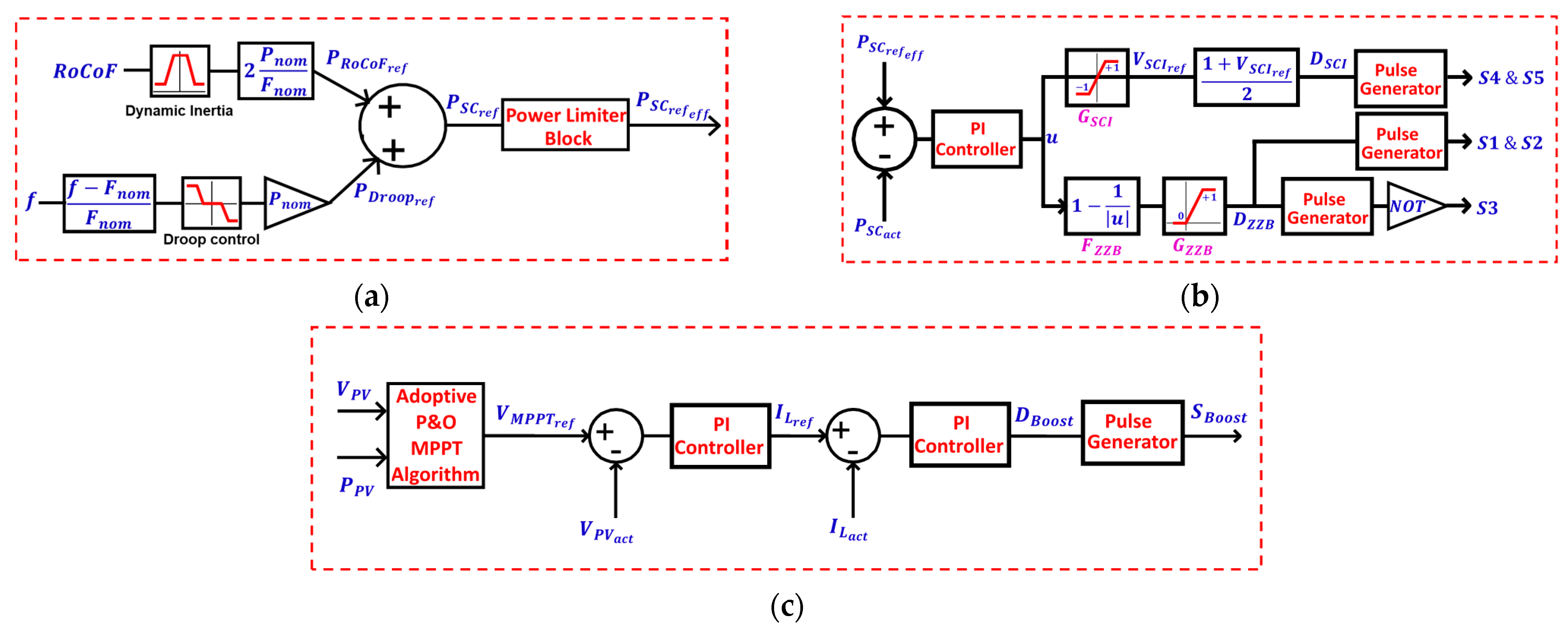
4. Implemented Control Schemes
- The proposed charge control scheme for SC using ZZB and SCI.
- MPPT control for the PV using the Boost Converter.
- DC-link voltage control and grid side control using a three-phase two-level VSI.
4.1. Charge Control Scheme for SC Using ZZB and SCI
4.1.1. The Outer Control Loop for the Reference Power Generation
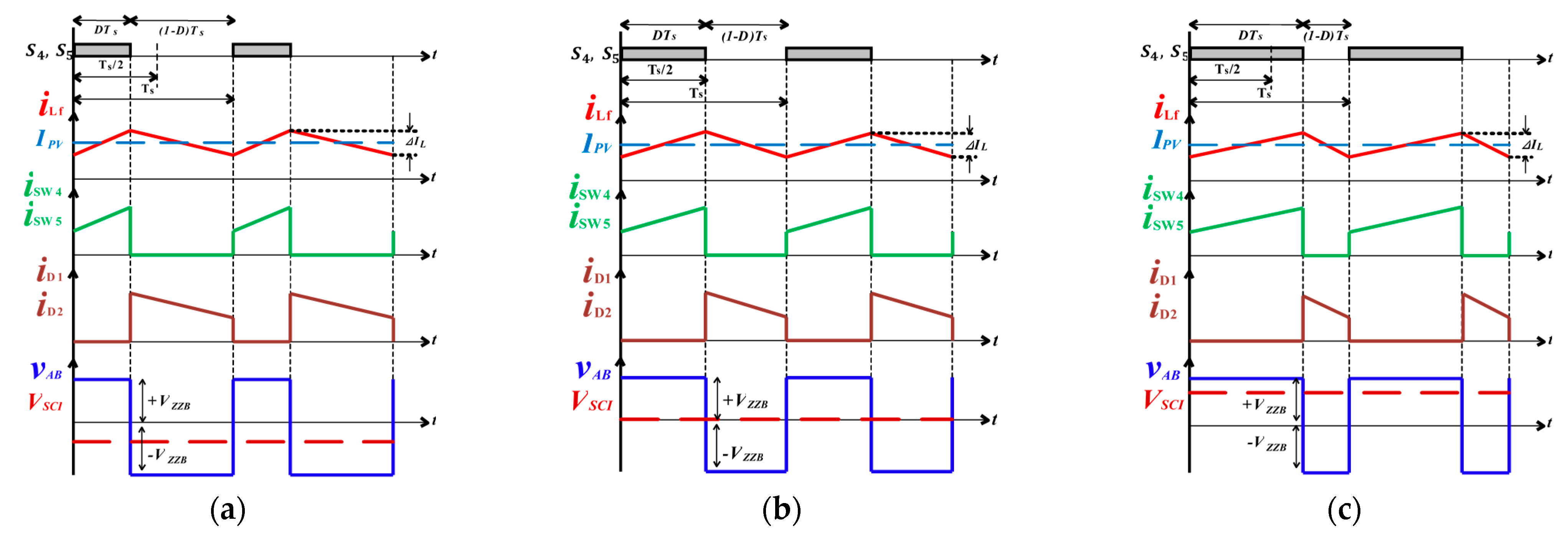
4.1.2. The Inner Control Loop to Decouple the ZZB Operation from SCI
4.2. Implemented MPPT Control for the Boost Converter
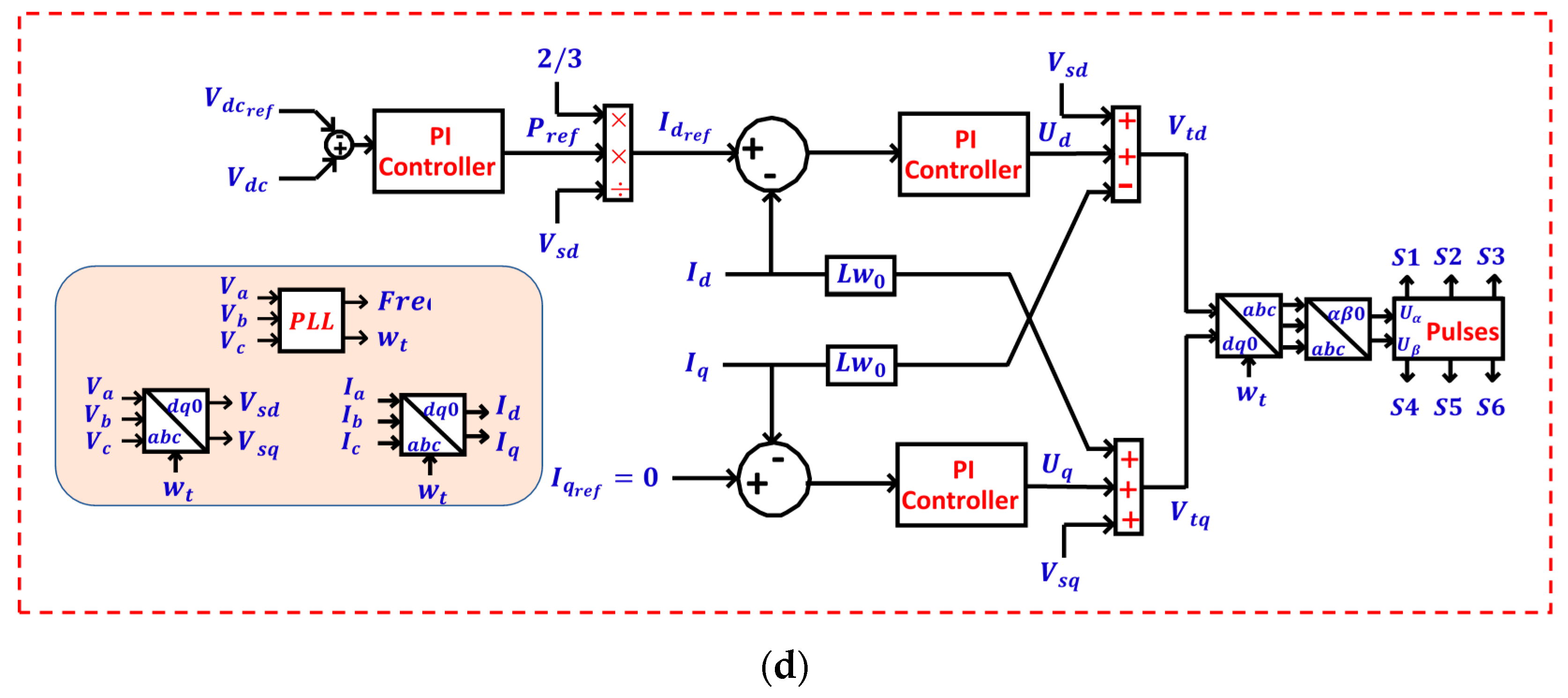
4.3. DC Link Voltage and Grid Side PQ Control Scheme Using a Three-Phase Two-Level VSI
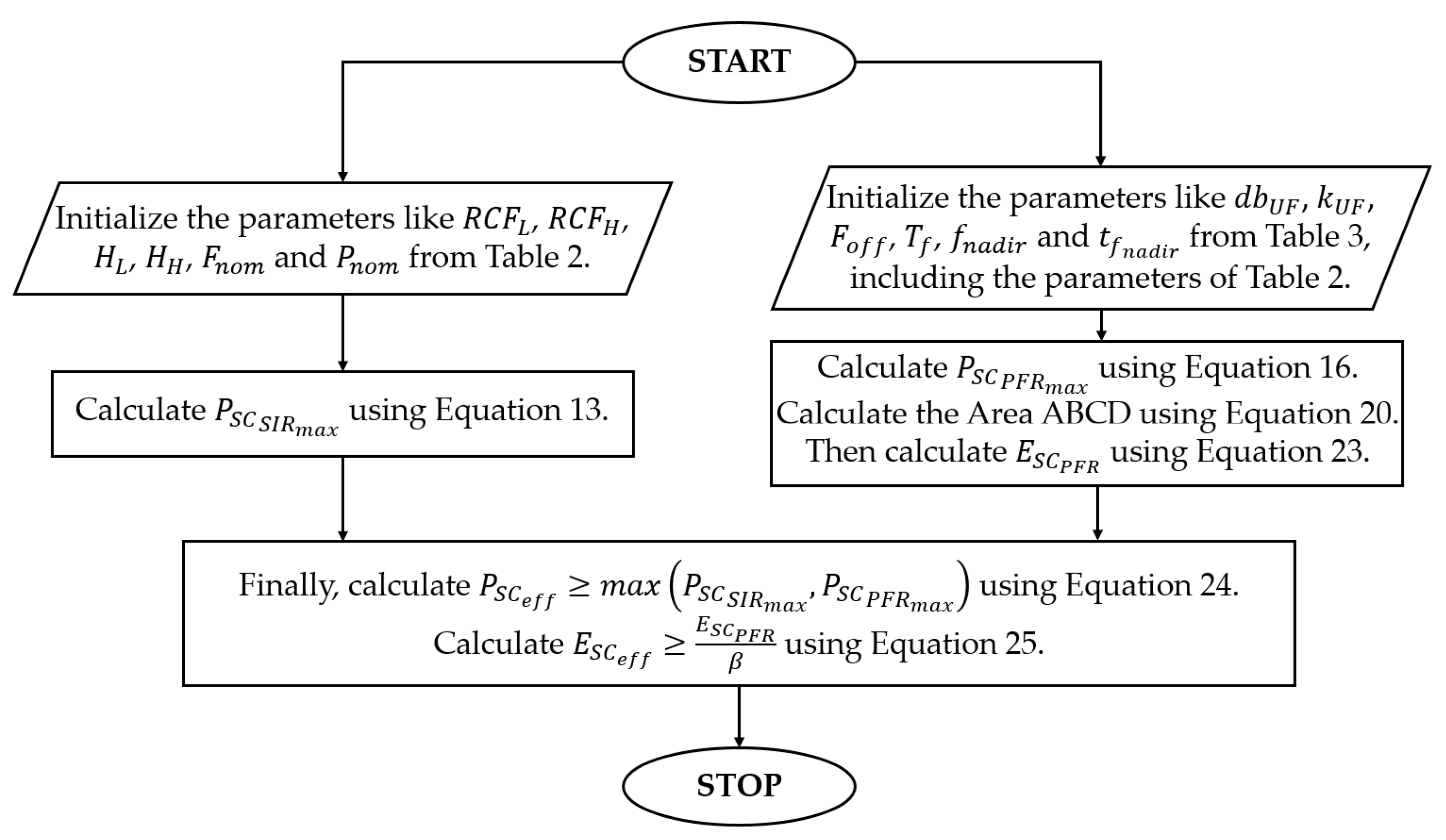
5. Methodology for Sizing of the SC Storage System
- The synthetic energy response is a high-power intensive service; however, the average energy demand, at the scale of a few seconds, is almost zero due to the frequent zero crossing of the RoCoF (zero net energy impact).
- The primary frequency response is intense not only in terms of power but also in terms of energy demand due to its comparatively longer event duration.
- Therefore, the power rating estimation of the SC-PPS () should be decided by considering both the SIR and the PFR.
- However, the energy rating of the SC modules () should be decided based only on the PFR.
5.1. Methodology Based on the Synthetic Inertia Response or the RoCoF Response
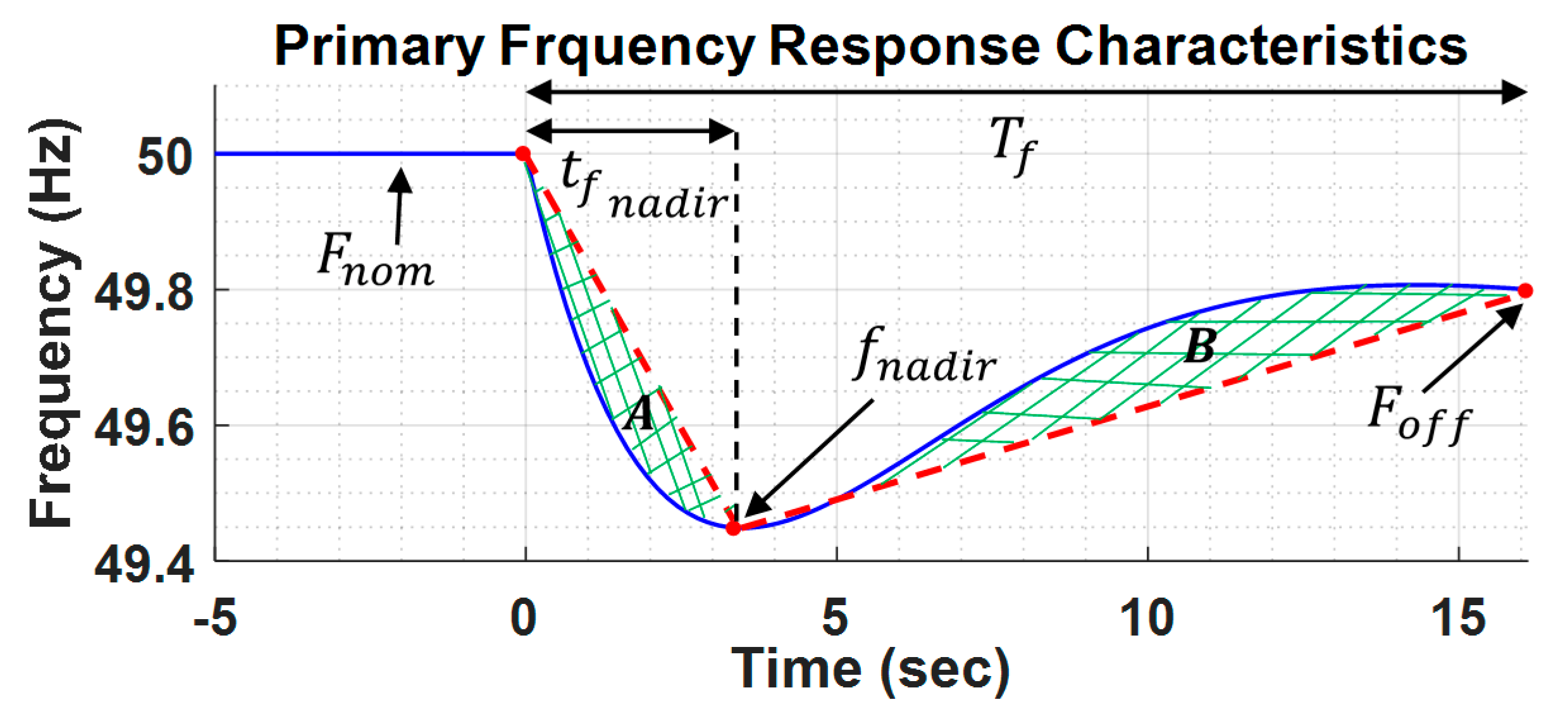
5.2. Methodology Based on the Primary Frequency Response
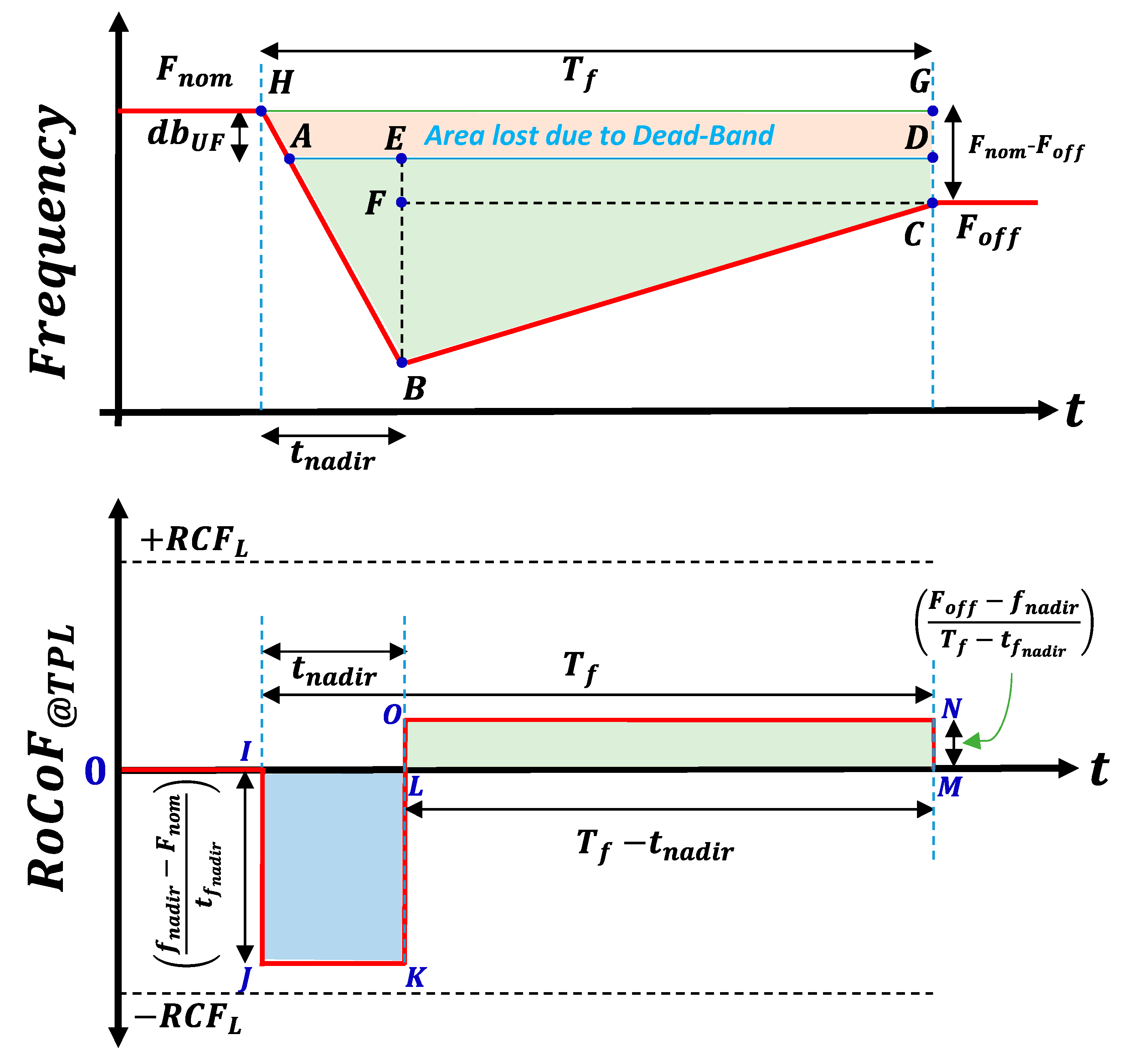
- Consideration 1: The calculation is independent of the exact occurrence of with the assumption that it mostly falls in the range of 20 to 40% of , which may slightly affect the calculation.
- Consideration 2: The lost area “A” is approximately equal to the gained area “B” in Figure 15, which may slightly affect the energy estimation for the PFR (. This approximation is quite acceptable in terms of obtaining a rough idea of the total energy requirement for the PFR. This is the case because, eventually, the final sizing will be strictly based on the commercially available SC modules, which will be of appropriate capacitance and voltage ratings with adequate safety factors. Nonetheless, more sophisticated approaches with additional intermediate points or a non-linear model would improve the accuracy of this method, but they would lose out in terms of the superior simplicity and practicality of our method.
- Consideration 3: Due to the linear nature of the TPL characteristic, the peak power demand of PFR will occur precisely at the if only the power contribution due to droop control () is considered.
- Consideration 4: The power contribution of RoCoF ) at should be considered to be zero because, under normal circumstances, we expect there to be zero RoCoF at since it is the minima point. Moreover, the contribution of is negligible at the vicinity of the point. Therefore, we consider only the droop contribution while estimating .
- Consideration 5: Do not neglect the part while calculating the SC Energy rating as there is a signification contribution of RoCoF towards the estimation of .
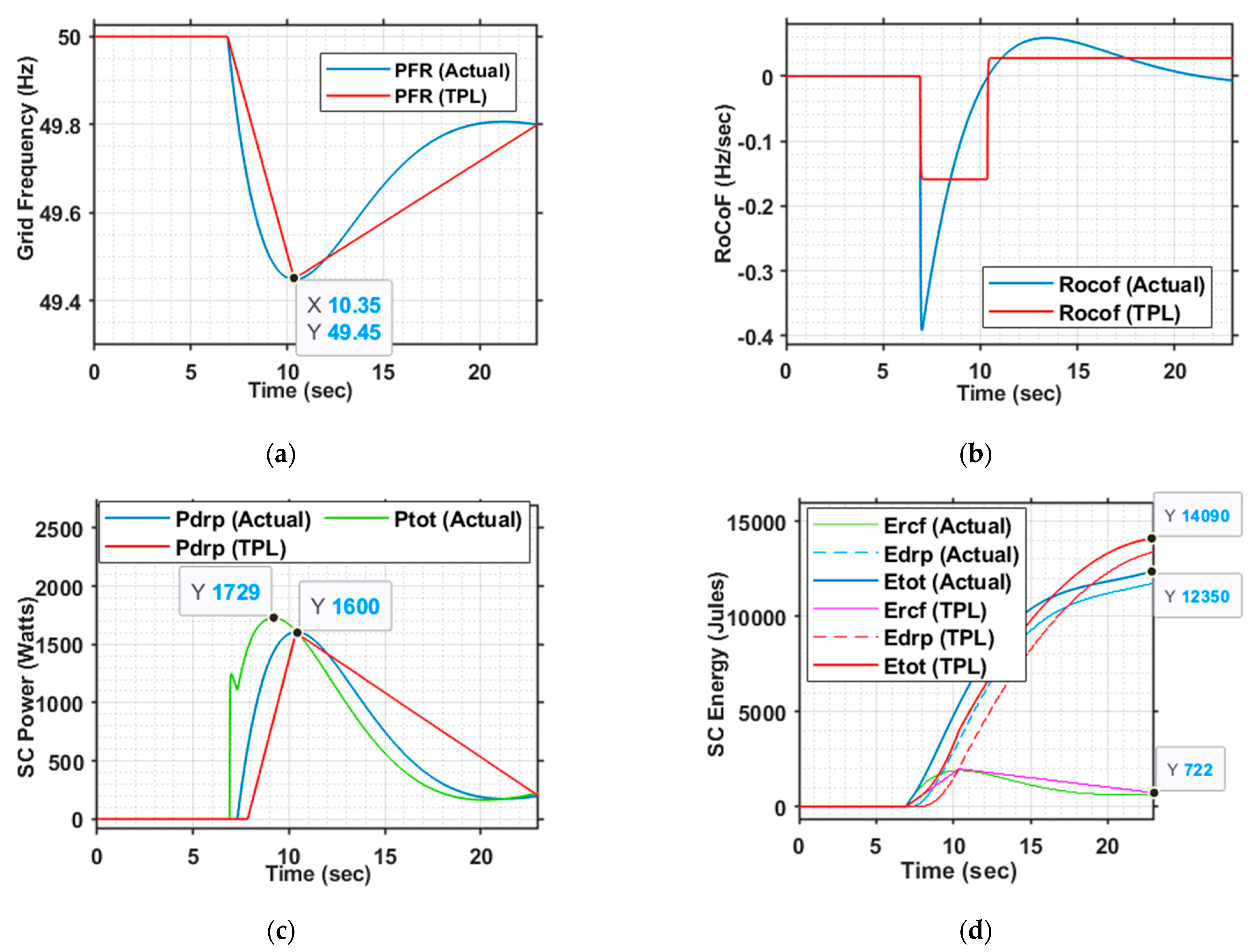
- Firstly, the theoretically calculated value of matched exactly with the simulated data of the benchmark case due to “Consideration 3 and Consideration 4”, which were previously mentioned. However, if the contribution of RoCoF was not neglected, there was an error of nearly 100 Watts in the estimation of , which was small and acceptable. This error occurred because, in the case of actual PFR characteristics, the mostly occurred slightly before the as the initial contribution of was greater due to the high starting RoCoF.
- Secondly, the theoretically calculated value of matched exactly with the simulated data for TPL characteristics. However, the simulated benchmark data were almost 12.5% smaller than those of the TPL characteristics data due to “Consideration 1 and Consideration 2”, which were mentioned previously. The main cause of the error was the overly sluggish slope of the TPL characteristics from the point to . Additional intermediate points can help in reducing the error, but this is ultimately a trade-off between simplicity and accuracy.
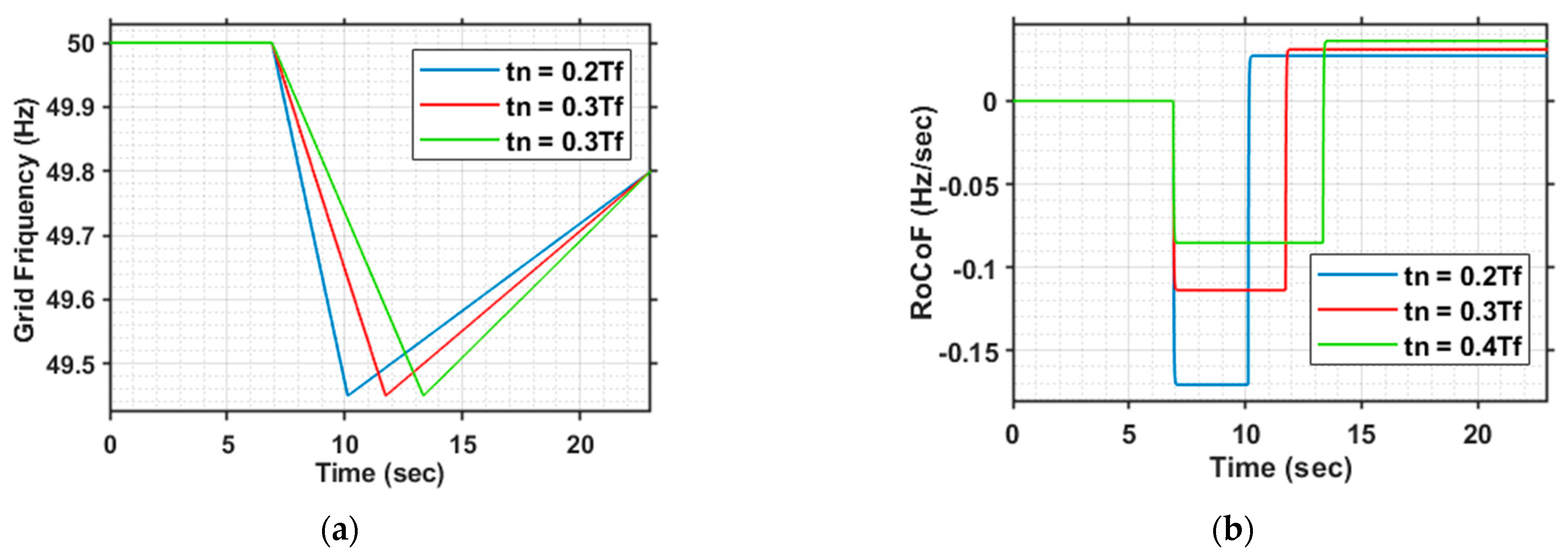
- Thirdly, the of the TPL characteristics matched exactly with that of the benchmark PFR characteristics as it was independent of the timing of and was a function of the difference between and .
- was independent of the timing of .
- was independent of and .
- There was slight difference in the values of for all three cases due to differences in the area under ABCD, which resulted in a slight difference in total energy, but the results were perfectly acceptable. Therefore, we can assume a value around 0.2–0.4 of when the former specification is not available.
5.3. Finalization of the SC Overall Rating
6. Verification of the Concept Subjected to Case Studies Using MATLAB/OPAL RT
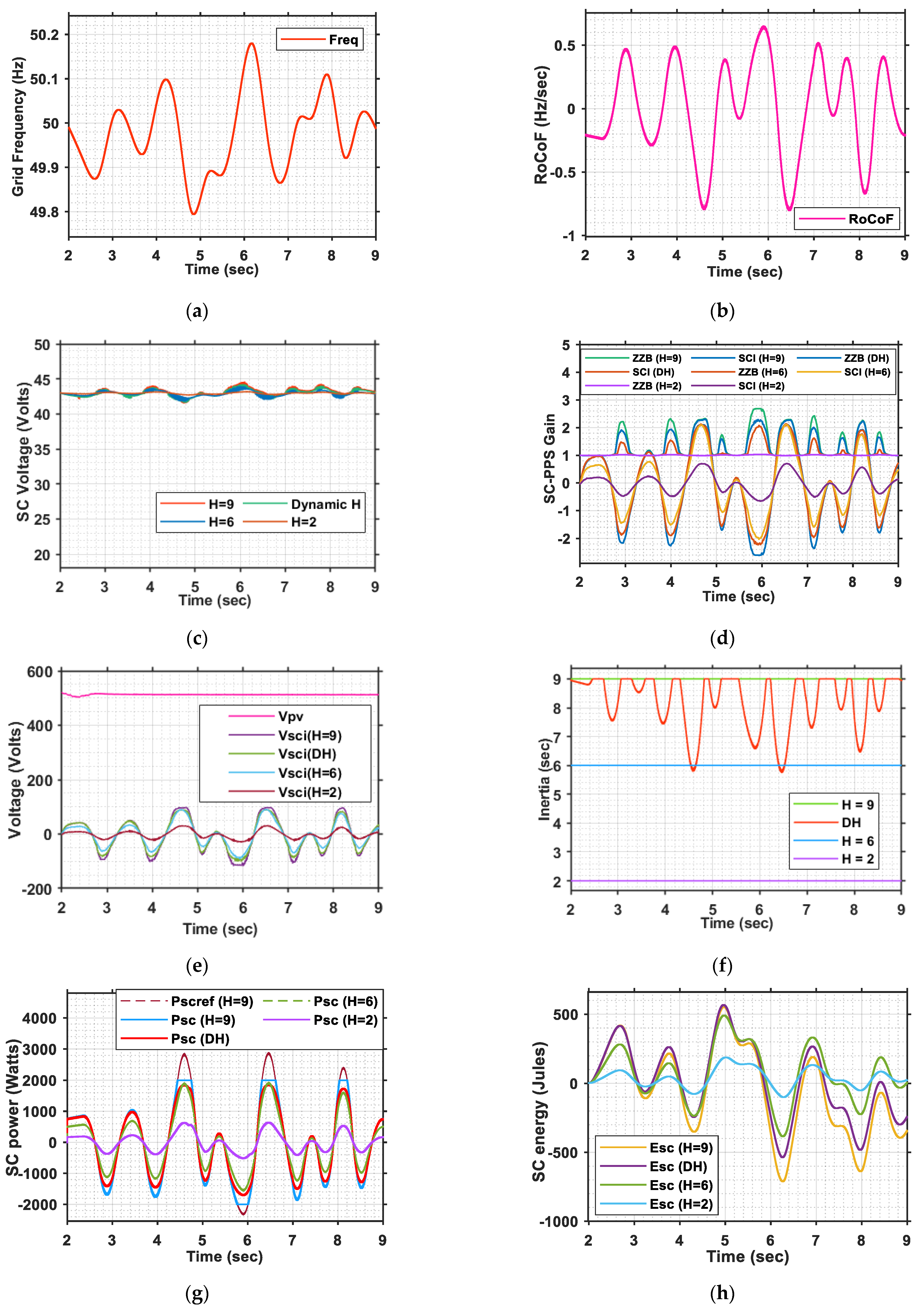
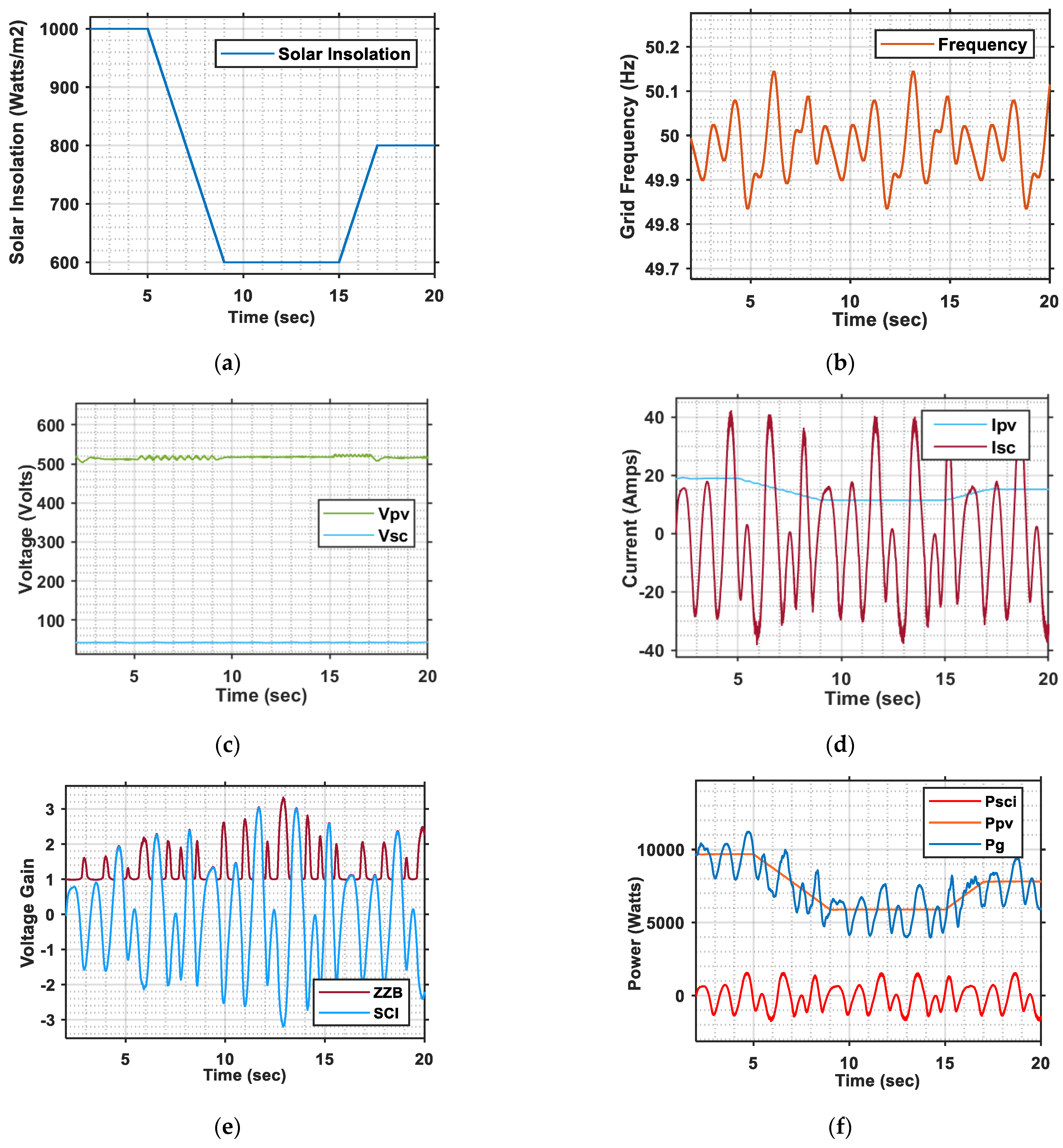
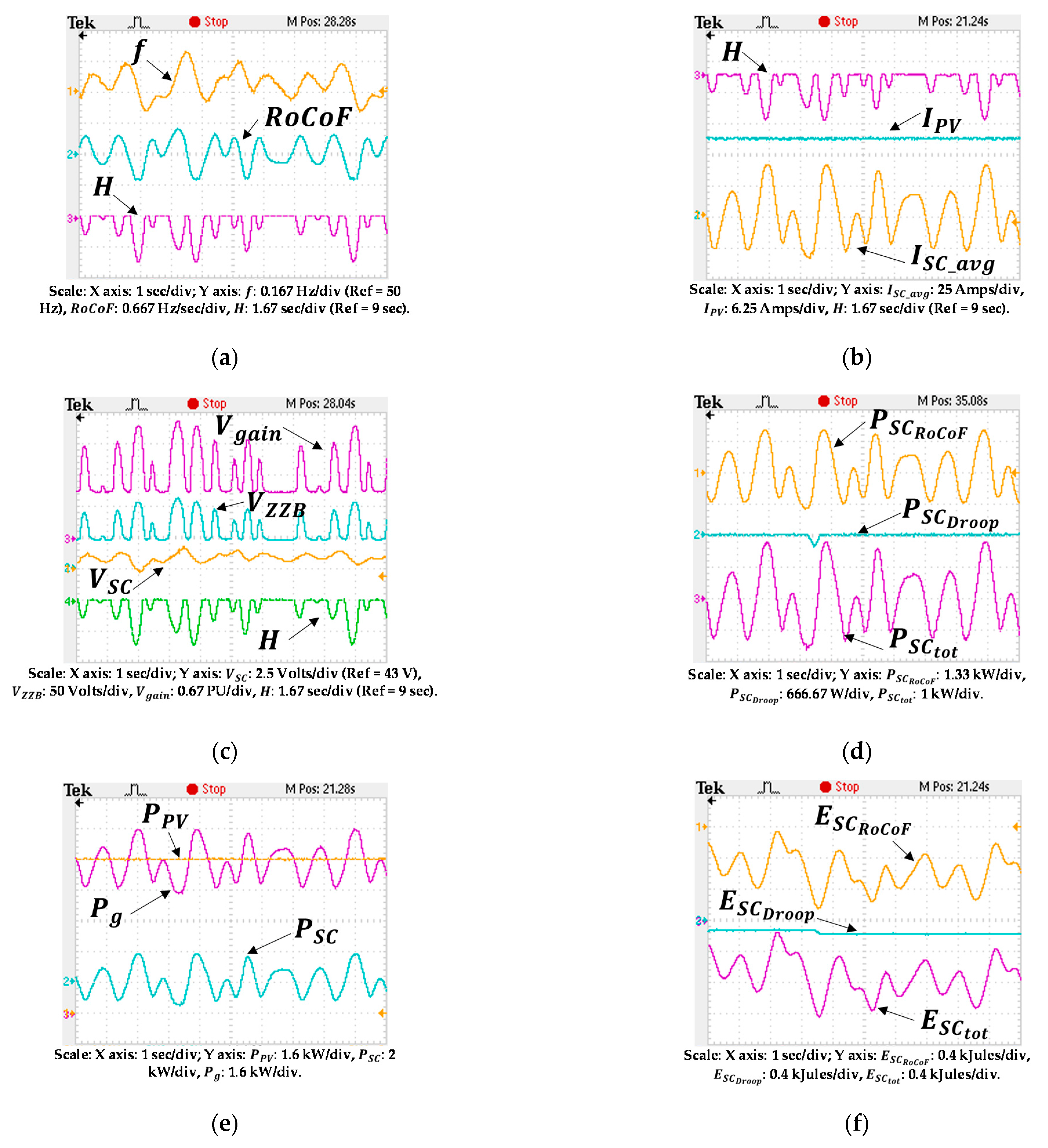
6.1. Case Studies to Verify SIR Only for Small-Frequency Fluctuations
- The proposed control ensured that the PV MPPT control was fully decoupled from the SC-PPS control, which was related to frequency response services.
- SIR was provided seamlessly irrespective of variations in the MPPT power, in accordance with the variation in solar insolation under consideration, and vice versa.
- Although there was hardly any change in MPPT voltage profile, the SC-PPS stage control responded to changes in the series PV current and regulated its output voltage to meet the required power exchange, thus proving the resiliency of our proposed control against the rapid change in the master source.
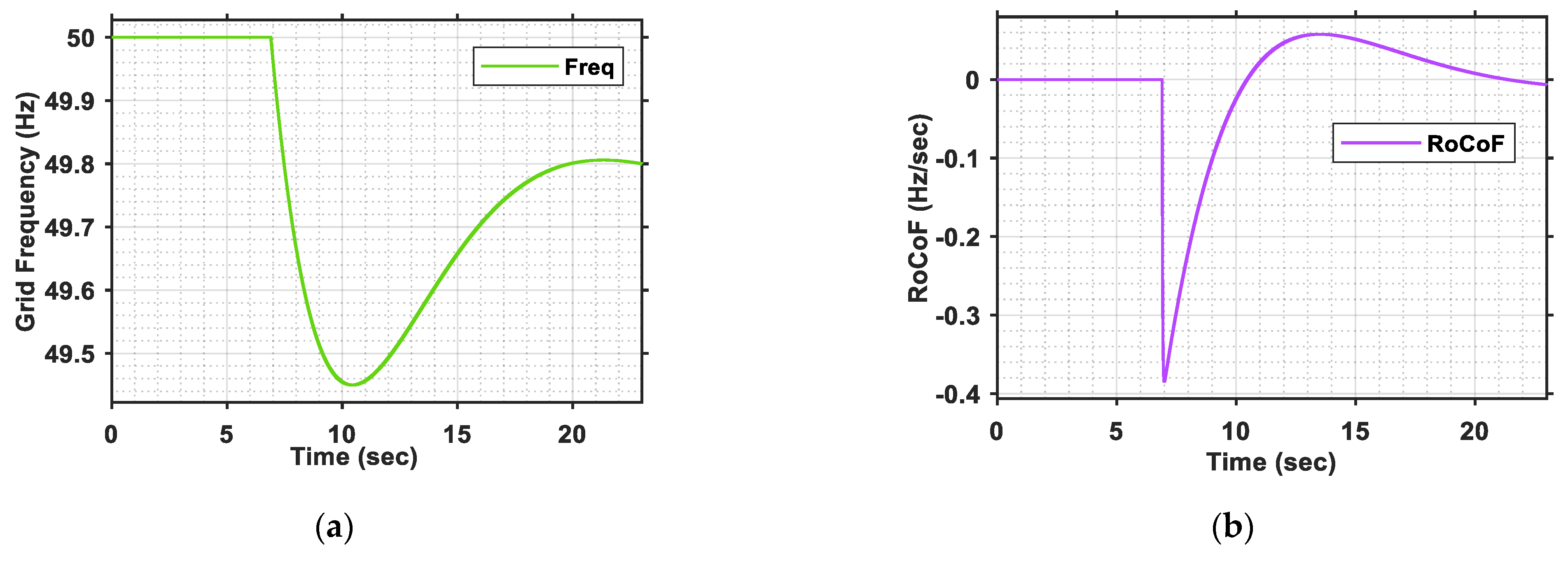
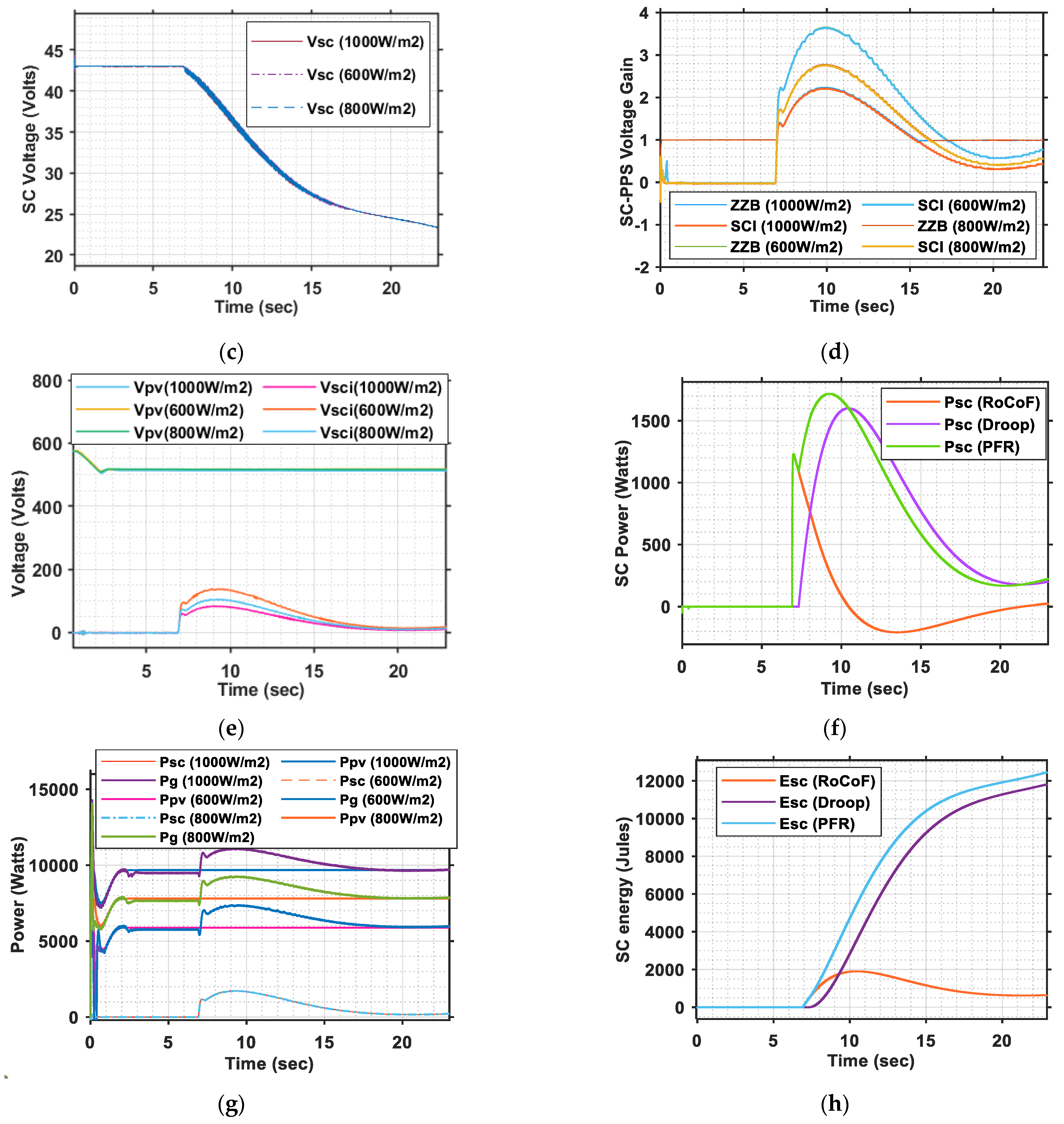
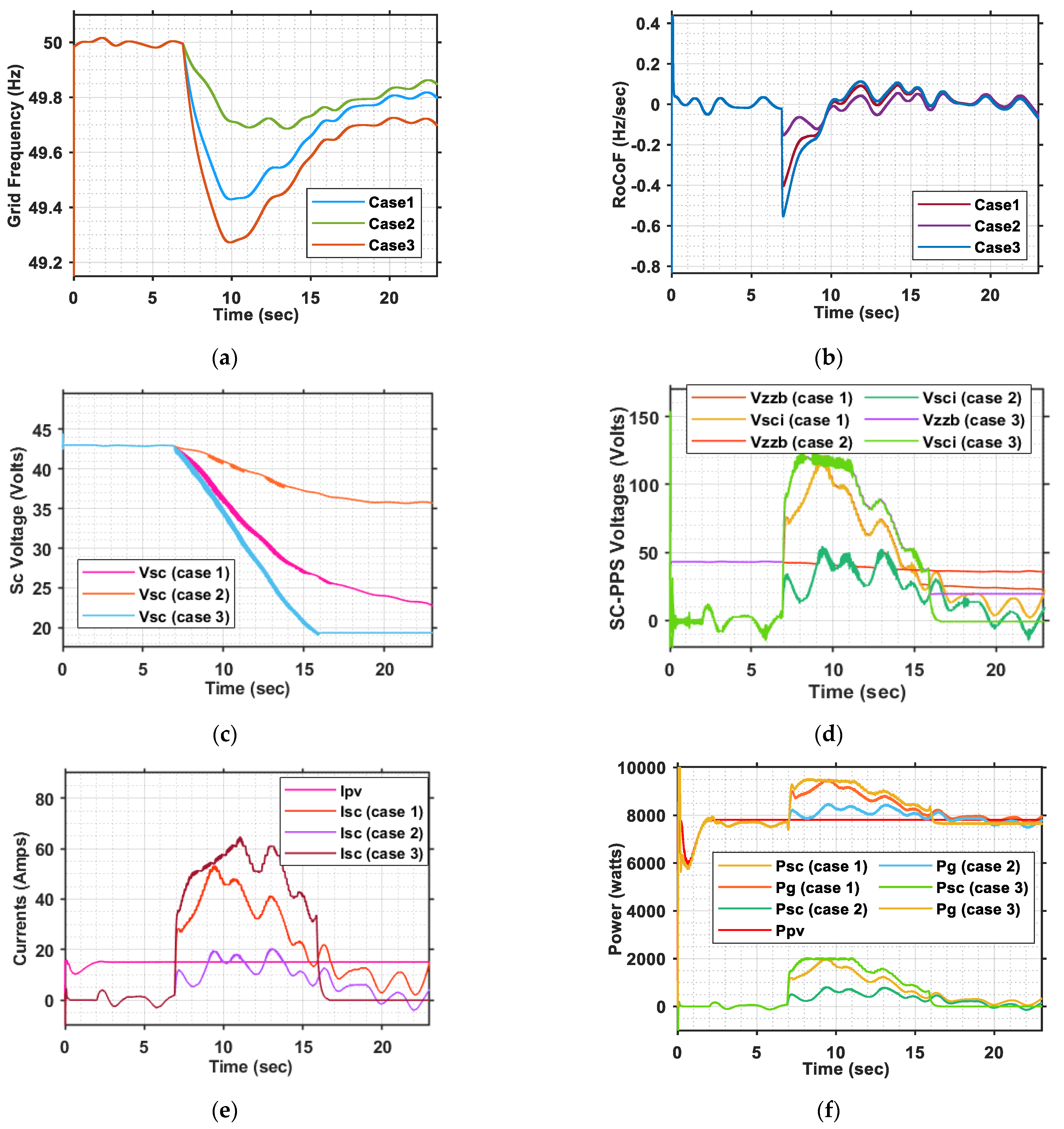
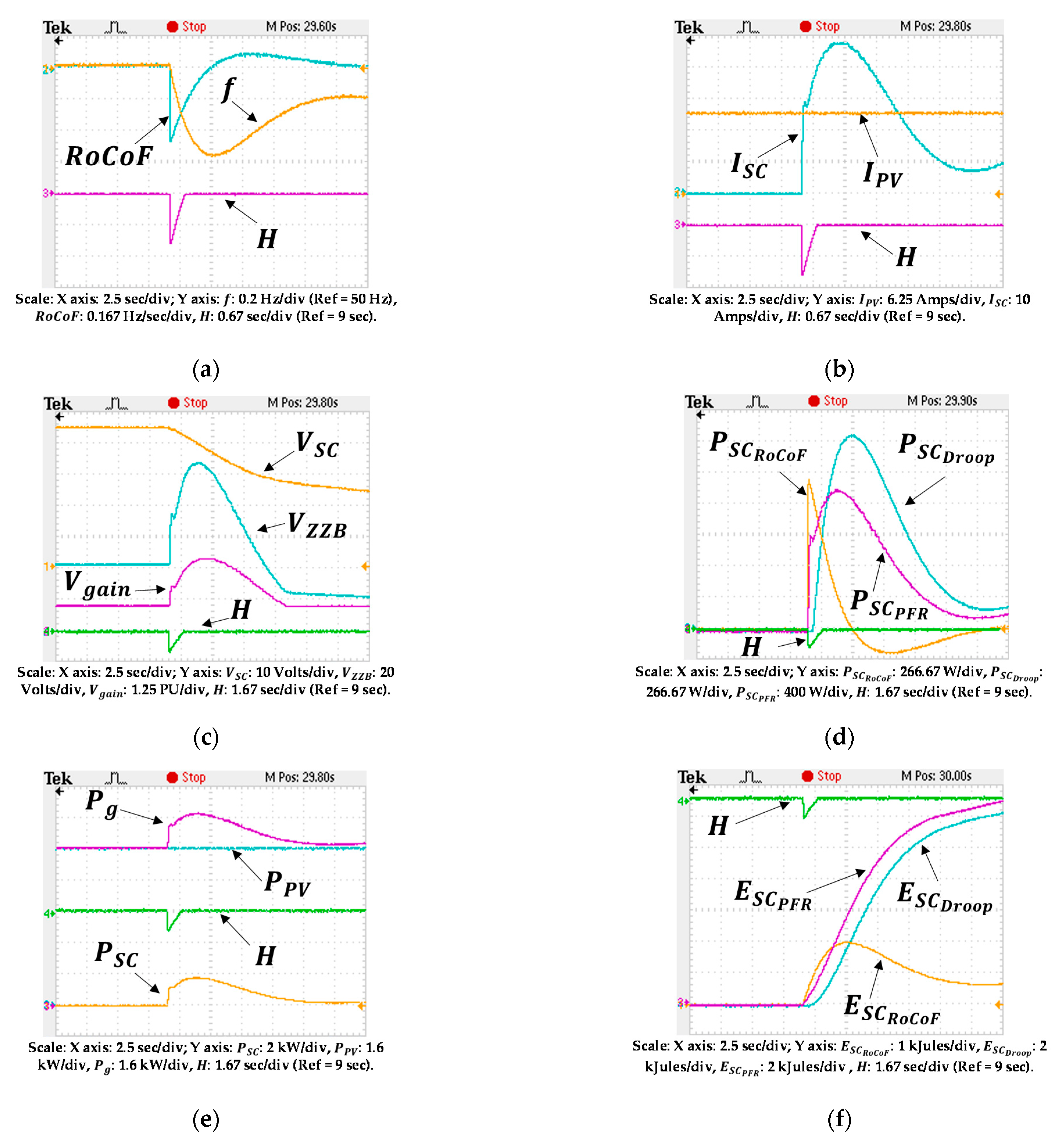
6.2. Case Studies to Verify PFR for Under-Frequency Events without Small-Frequency Fluctuations
6.3. Case Studies to Verify PFR for Under-Frequency Events with Small-Frequency Fluctuations
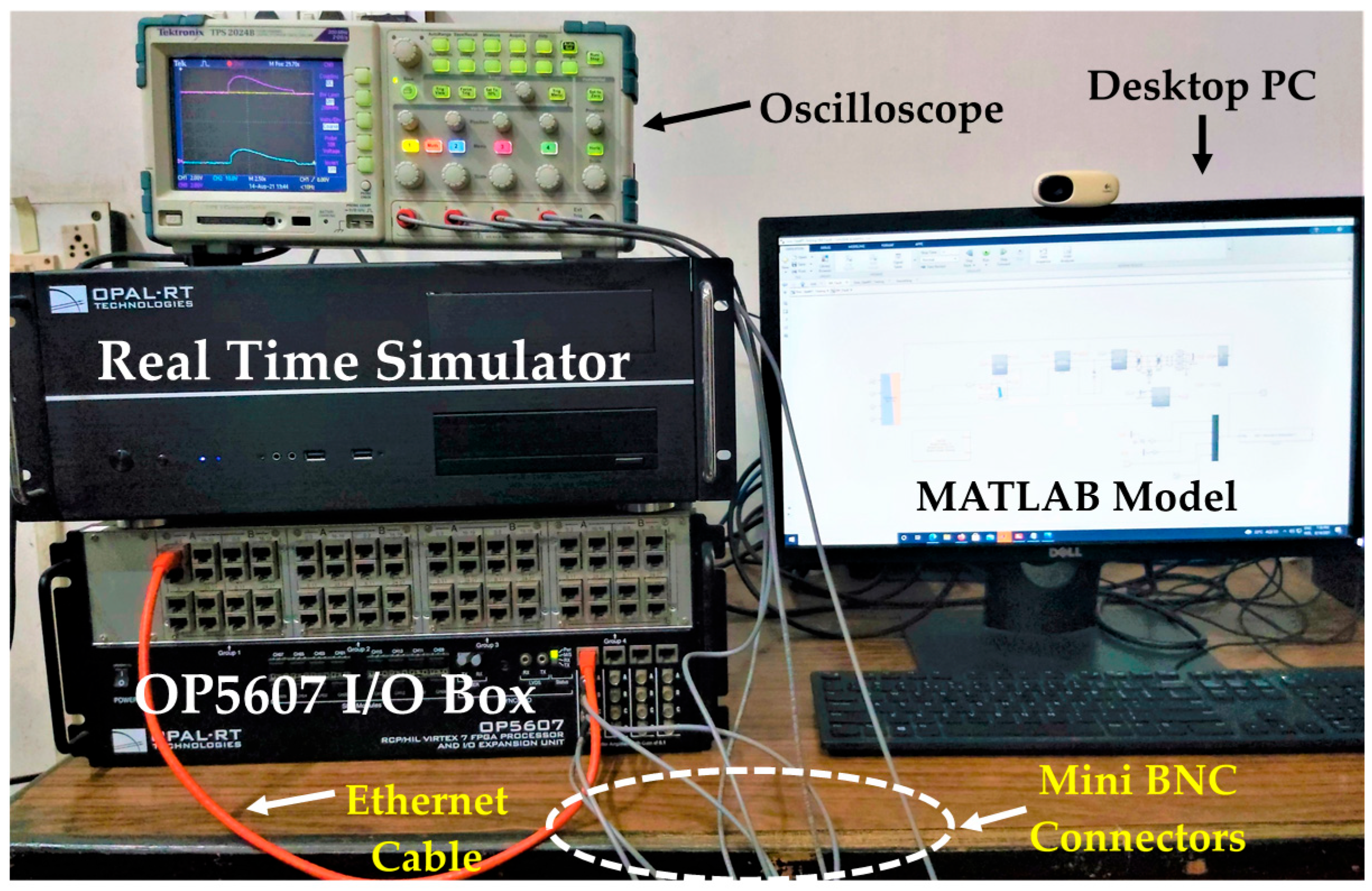
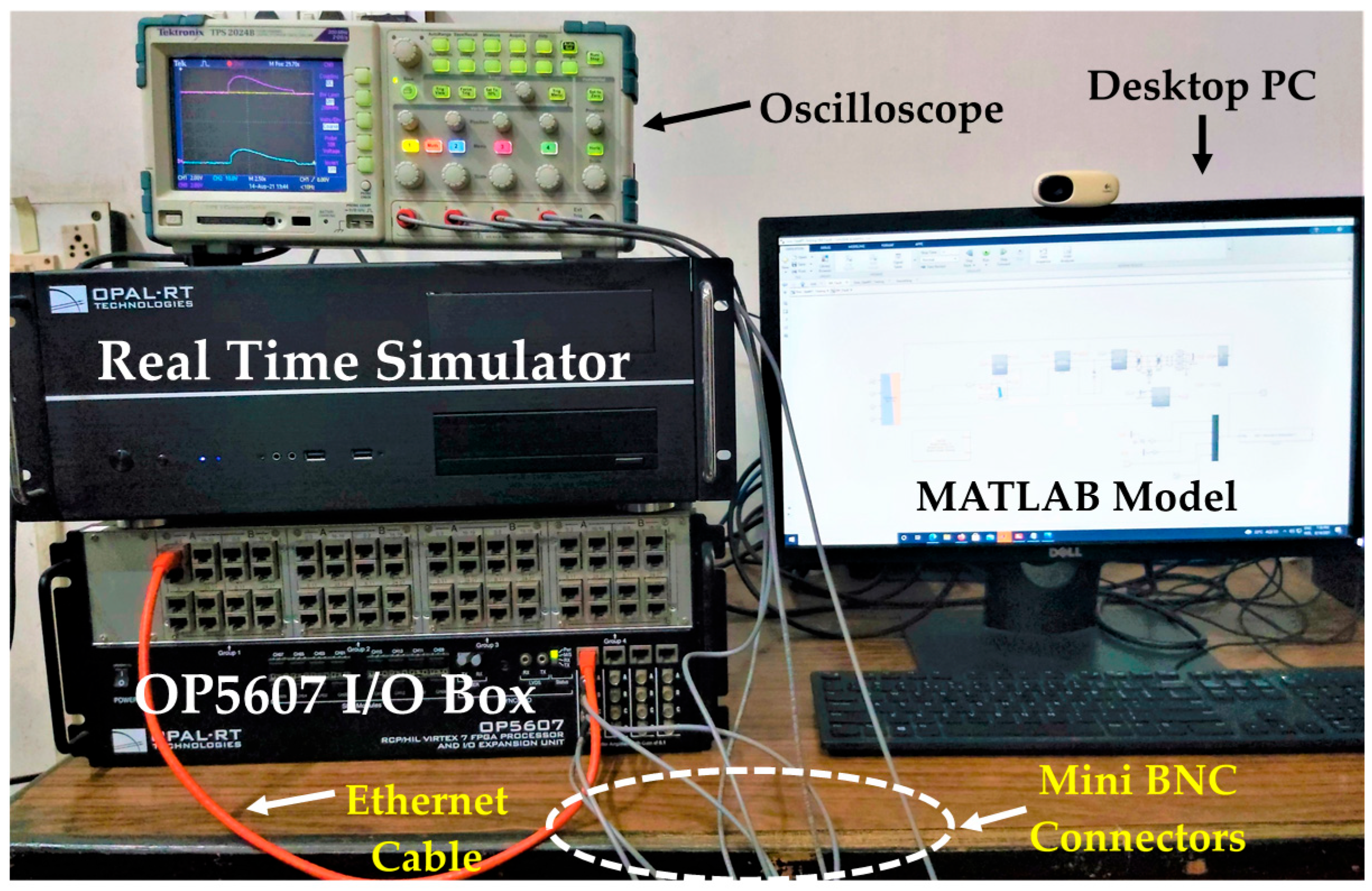
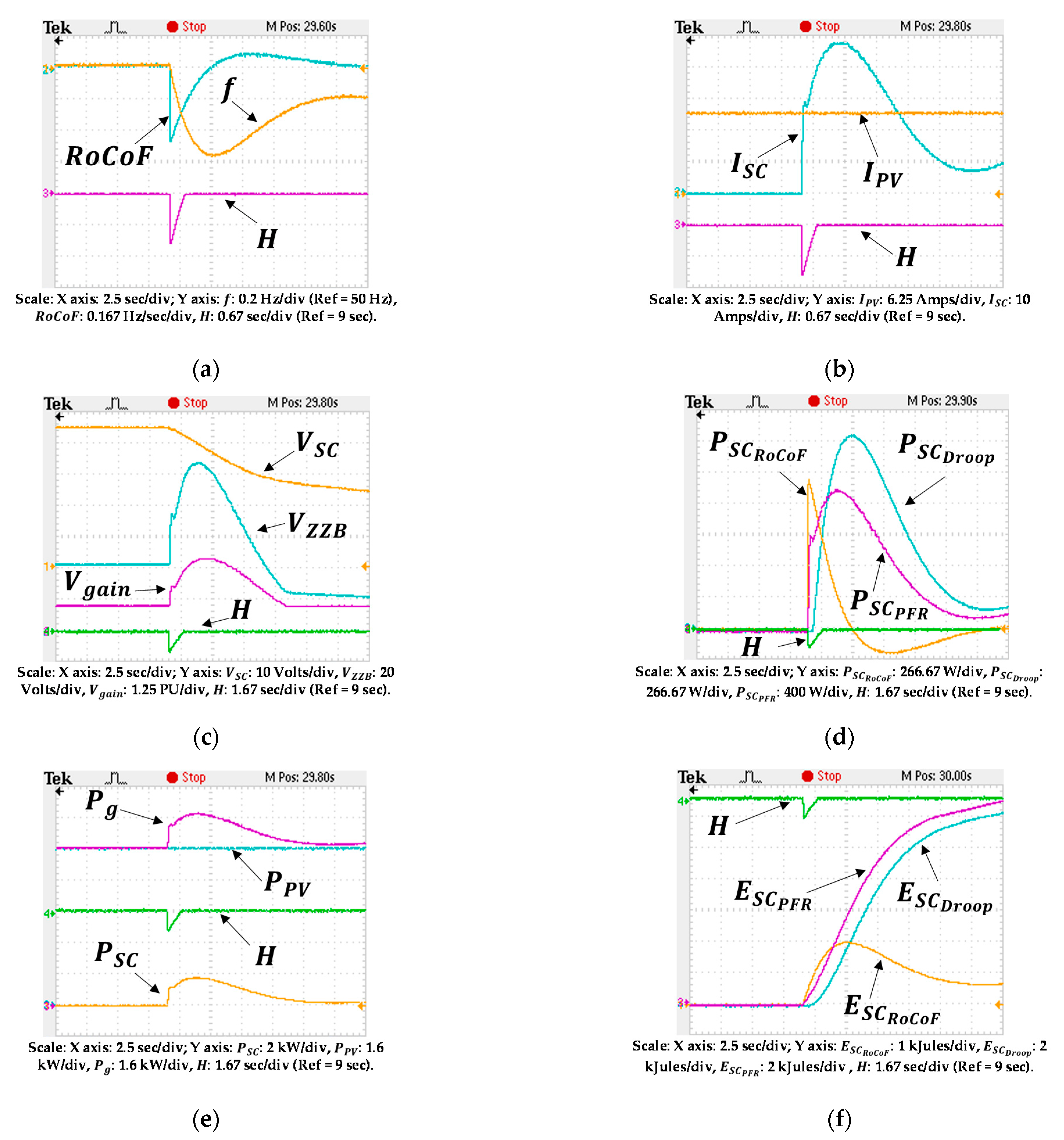
6.4. Validation through OPAL RT Test Bed
- The severity of low-frequency oscillation was considered low for Case study 3 as compared to Case study 1.
- The Solar Insolation, for all the case studies, was considered to be 800 Watts/m2.
- The initial SC voltage was 43 V for all the cases and, for Case study 1, 43 V was taken as the reference for plotting of the SC voltage profile.
- The emulated inertia profile was considered as a reference for all the real-time results to understand the system response with respect to the occurrence of the event.
- The scaling of the measuring entities was selected in such a way that the effect of noise in the BMC connector could be minimized.
- For the frequency profile, 50 Hz was taken as a reference for plotting.
- For the inertia profile, 9 s was taken as a reference for plotting.
- The emulated inertia constant (PU) varied between 9 and 6.5 s.
- The variation in SC voltage profile was almost negligible.
- The maximum voltage gain requirement of the ZZB was nearly 2.5.
- The peak average current of the SC was nearly 43 A.
- The PV current remained unaffected with an MPPT current of nearly 15.8 A.
- The contribution of the Droop control was almost zero.
- The peak SC power requirement was nearly 1.8 kWatts.
- The total grid power was the sum of the PV MPPT power and the SC output power.
- The SC energy requirement over a cycle of a few seconds was almost zero.
- The emulated inertia constant (PU) dropped down to almost 7.9 s from 9 s precisely at the moment of the frequency event due to the high RoCoF.
- The SC experienced a large variation of voltage from 43 to 25 V.
- The maximum voltage gain requirement of the ZZB was nearly 2.9. (operated at unity gain before the event).
- The peak average current of the SC was nearly 48 A.
- The PV current remained unaffected with an MPPT current of nearly 15.8 A.
- The contribution of the Droop control was prevalent over the RoCoF control.
- The peak SC power requirement was nearly 1.8 kWatts.
- The SC energy requirement was found to be nearly 13 kJules.
- The total grid power was the sum of the PV MPPT power and the SC output power.
- The emulated inertia constant (PU) dropped down to almost 7.3 s from 9 s precisely at the moment of the frequency event due to the high RoCoF.
- The SC experienced a large variation in voltage from 43 to 25 V.
- The maximum voltage gain requirement of the ZZB was nearly 3.6 (operated close to unity gain before the under-frequency event).
- The peak average current of SC was nearly 52 A.
- The PV current remained unaffected with an MPPT current of nearly 15.8 A.
- The contribution of the Droop control prevailed over the RoCoF control.
- The peak SC power requirement was nearly 2 kWatts.
- The SC energy requirement was nearly 12.4 kJules.
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Capacity-and-Generation. Available online: https://www.irena.org/Statistics/View-Data-by-Topic/Capacity-and-Generation (accessed on 2 July 2021).
- GREENING THE GRID: Pathways to Integrate 175 Gigawatts of Renewable Energy into India’s Electric Grid, Vol. I—National Study. Available online: https://www.nrel.gov/docs/fy17osti/68530.pdf (accessed on 2 July 2021).
- United Nations Framework Convention on Climate Change. Available online: https://en.wikipedia.org/wiki/United_Nations_Framework_Convention_on_Climate_Change (accessed on 9 August 2021).
- Rajan, R.; Francis, M.F.; Yang, Y. Primary frequency control techniques for large-scale PV-integrated power systems: A review. Renew. Sustain. Energy Rev. 2021, 144, 110998. [Google Scholar] [CrossRef]
- Hartmann, B.; Vokony, I.; Táczi, I. Effects of decreasing synchronous inertia on power system dynamics—Overview of recent experiences and marketisation of services. Int. Trans. Electr. Energy Syst. 2019, 29, e12128. [Google Scholar] [CrossRef] [Green Version]
- Black System South Australia 28 September 2016—Final Report. Available online: http://www.aemo.com.au/-/media/Files/Electricity/NEM/Market_Notices_and_Events/Power_System_Incident_Reports/2017/Integrated-Final-Report-SA-Black-System-28-September-2016.pdf (accessed on 12 July 2021).
- Delille, G.; François, B.; Malarange, G. Dynamic frequency control support: A virtual inertia provided by distributed energy storage to isolated power systems. In Proceedings of the 2010 IEEE PES Innovative Smart Grid Technologies Conference Europe (ISGT Europe), Gothenburg, Sweden, 11–13 October 2010; pp. 1–8. [Google Scholar]
- Agha, M.M.; Hajar, A. A new approach for optimal sizing of battery energy storage system for primary frequency control of islanded Microgrid. Int. J. Electr. Power Energy Syst. 2014, 54, 325–333. [Google Scholar]
- Wu, D.; Tang, F.; Dragicevic, T.; Guerrero, J.M.; Vasquez, J.C. Coordinated Control Based on Bus-Signaling and Virtual Inertia for Islanded DC Microgrids. IEEE Trans. Smart Grid 2015, 6, 2627–2638. [Google Scholar] [CrossRef] [Green Version]
- Miguel, R.G.; Rafael, C.; Jorge, C.; Malik, O.P. Placement and sizing of battery energy storage for primary frequency control in an isolated section of the Mexican power system. Electr. Power Syst. Res. 2018, 160, 142–150. [Google Scholar]
- Engels, J.; Claessens, B.; Deconinck, G. Combined Stochastic Optimization of Frequency Control and Self-Consumption with a Battery. IEEE Trans. Smart Grid 2019, 10, 1971–1981. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.J.A.; Zhao, C.; Tang, W.; Low, S.H. Profit-Maximizing Planning and Control of Battery Energy Storage Systems for Primary Frequency Control. IEEE Trans. Smart Grid 2018, 9, 712–723. [Google Scholar] [CrossRef] [Green Version]
- Lee, D.; Wang, L. Small-Signal Stability Analysis of an Autonomous Hybrid Renewable Energy Power Generation/Energy Storage System Part I: Time-Domain Simulations. IEEE Trans. Energy Convers. 2008, 23, 311–320. [Google Scholar] [CrossRef]
- Tam, K.; Kumar, P.; Foreman, M. Enhancing the utilization of photovoltaic power generation by superconductive magnetic energy storage. IEEE Trans. Energy Convers. 1989, 4, 314–321. [Google Scholar] [CrossRef]
- Ibrahim, H.; Ilinca, A.; Perron, J. Energy storage systems—Characteristics and comparisons. Renew. Sustain. Energy Rev. 2008, 12, 1221–1250. [Google Scholar] [CrossRef]
- Sutanto, D.; Cheng, K.W.E. Superconducting magnetic energy storage systems for power system applications. In Proceedings of the International Conference on Applied Superconductivity and Electromagnetic Devices, Chengdu, China, 25–27 September 2009. [Google Scholar]
- Sangwongwanich, A.; Yang, Y.; Blaabjerg, F.; Sera, D. Delta Power Control Strategy for Multistring Grid-Connected PV Inverters. IEEE Trans. Ind. Appl. 2017, 53, 3862–3870. [Google Scholar] [CrossRef] [Green Version]
- Zarina, P.P.; Mishra, S.; Sekhar, P.C. Exploring frequency control capability of a PV system in a hybrid PV-rotating machine-without storage system. Int. J. Electr. Power Energy Syst. 2014, 60, 258–267. [Google Scholar] [CrossRef]
- Hoke, A.F.; Shirazi, M.; Chakraborty, S.; Muljadi, E.; Maksimovic, D. Rapid Active Power Control of Photovoltaic Systems for Grid Frequency Support. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 5, 1154–1163. [Google Scholar] [CrossRef]
- Hoke, A.F.; Maksimovic, D. Active power control of photovoltaic power systems. In Proceedings of the IEEE Conference on Technologies for Sustainability (SusTech), Portland, OR, USA, 1–2 August 2013. [Google Scholar]
- Crăciun, B.; Kerekes, T.; Séra, D.; Teodorescu, R. Frequency Support Functions in Large PV Power Plants with Active Power Reserves. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 849–858. [Google Scholar] [CrossRef]
- Lyu, X.; Zhao, X.; Zhao, J. A coordinated frequency control strategy for photovoltaic system in micro grid. J. Int. Counc. Electr. Eng. 2018, 8, 37–43. [Google Scholar] [CrossRef] [Green Version]
- Sekhar, P.C.; Mishra, S. Storage Free Smart Energy Management for Frequency Control in a Diesel-PV-Fuel Cell-Based Hybrid AC Microgrid. IEEE Trans. Neural Netw. Learn. Syst. 2016, 27, 1657–1671. [Google Scholar] [CrossRef]
- Soni, N.; Doolla, S.; Chandorkar, M.C. Improvement of Transient Response in Microgrids Using Virtual Inertia. IEEE Trans. Power Deliv. 2013, 28, 1830–1838. [Google Scholar] [CrossRef]
- Kerdphol, T.; Watanabe, M.; Hongesombut, K.; Mitani, Y. Self-Adaptive Virtual Inertia Control-Based Fuzzy Logic to Improve Frequency Stability of Microgrid with High Renewable Penetration. IEEE Access 2019, 7, 76071–76083. [Google Scholar] [CrossRef]
- Guo, K.; Tang, Y.; Fang, J. Exploration of the Relationship Between Inertia Enhancement and DC-Link Capacitance for Grid-Connected Converters. In Proceedings of the IEEE 4th Southern Power Electronics Conference (SPEC), Singapore, 10–13 December 2018. [Google Scholar]
- Fang, J.; Li, H.; Tang, Y.; Blaabjerg, F. Distributed Power System Virtual Inertia Implemented by Grid-Connected Power Converters. IEEE Trans. Power Electron. 2018, 33, 8488–8499. [Google Scholar] [CrossRef] [Green Version]
- Waffenschmidt, E.; Hui, R.S.Y. Virtual inertia with PV inverters using DC-link capacitors. In Proceedings of the 18th European Conference on Power Electronics and Applications (EPE’16 ECCE Europe), Karlsruhe, Germany, 5–9 September 2016. [Google Scholar]
- Bazargan, D.; Bahrani, B.; Filizadeh, S. Reduced Capacitance Battery Storage DC-Link Voltage Regulation and Dynamic Improvement Using a Feedforward Control Strategy. IEEE Trans. Energy Convers. 2018, 33, 1659–1668. [Google Scholar] [CrossRef]
- Kakimoto, N.; Takayama, S.; Satoh, H.; Nakamura, K. Power Modulation of Photovoltaic Generator for Frequency Control of Power System. IEEE Trans. Energy Convers. 2009, 24, 943–949. [Google Scholar] [CrossRef]
- Jami, M.; Shafiee, Q.; Gholami, M.; Hassan, B. Control of a super-capacitor energy storage system to mimic inertia and transient response improvement of a direct current micro-grid. J. Energy Storage 2020, 32, 101788. [Google Scholar] [CrossRef]
- Monai, T.; Takano, I.; Nishikawa, H.; Sawada, Y. A collaborative operation method between new energy-type dispersed power supply and EDLC. IEEE Trans. Energy Convers. 2004, 19, 590–598. [Google Scholar] [CrossRef]
- Kakimoto, N.; Satoh, H.; Takayama, S.; Nakamura, K. Ramp-Rate Control of Photovoltaic Generator with Electric Double-Layer Capacitor. IEEE Trans. Energy Convers. 2009, 24, 465–473. [Google Scholar] [CrossRef]
- Zheng, H.; Li, S.; Zang, C.; Zheng, W. Coordinated control for grid integration of PV array, battery storage, and supercapacitor. In Proceedings of the 2013 IEEE Power & Energy Society General Meeting, Vancouver, BC, Canada, 21–25 July 2013. [Google Scholar]
- Ravada, B.R.; Tummuru, N.R. Control of a Supercapacitor-Battery-PV Based Stand-Alone DC-Microgrid. IEEE Trans. Energy Convers. 2020, 35, 1268–1277. [Google Scholar] [CrossRef]
- Ravada, B.R.; Tummuru, N.R.; Ande, B.N.L. Photovoltaic-Wind and Hybrid Energy Storage Integrated Multisource Converter Configuration-Based Grid-Interactive Microgrid. IEEE Trans. Ind. Electron. 2021, 68, 4004–4013. [Google Scholar] [CrossRef]
- Palla, N.; Kumar, V.S.S. Coordinated Control of PV-Ultracapacitor System for Enhanced Operation Under Variable Solar Irradiance and Short-Term Voltage Dips. IEEE Access 2020, 8, 211809–211819. [Google Scholar] [CrossRef]
- Palma, L. Analysis of supercapacitor connection to PV power conditioning systems for improved performance. In Proceedings of the 2015 International Conference on Clean Electrical Power (ICCEP), Taormina, Italy, 16–18 June 2015. [Google Scholar]
- Zhu, H.; Zhang, D.; Athab, H.S.; Wu, B.; Gu, Y. PV Isolated Three-Port Converter and Energy-Balancing Control Method for PV-Battery Power Supply Applications. IEEE Trans. Ind. Electron. 2015, 62, 3595–3606. [Google Scholar] [CrossRef]
- Anees, V.P.; Biswas, I.; Chatterjee, K.; Kastha, D.; Bajpai, P. Isolated Multiport Converter for Solar PV Systems and Energy Storage Systems for DC Microgrid. In Proceedings of the 2018 15th IEEE India Council International Conference (INDICON), Coimbatore, India, 16–18 December 2018. [Google Scholar]
- Al-Chlaihawi, S.J. Comparative study of the multiport converter used in renewable energy systems. In Proceedings of the 2016 International Conference on Applied and Theoretical Electricity (ICATE), Craiova, Romania, 6–8 October 2016. [Google Scholar]
- Kolahian, P.; Tarzamni, H.; Nikafrzoo, A.; Hamzeh, M. Multi-port DC–DC converter for bipolar medium voltage DC microgrid applications. IET Power Electron. 2019, 12, 1841–1849. [Google Scholar] [CrossRef]
- Faraji, R.; Ding, L.; Rahimi, T.; Kheshti, M.; Islam, M.R. Soft-Switched Three-Port DC-DC Converter with Simple Auxiliary Circuit. IEEE Access 2021, 9, 66738–66750. [Google Scholar] [CrossRef]
- Uno, M.; Sugiyama, K. Switched Capacitor Converter Based Multiport Converter Integrating Bidirectional PWM and Series-Resonant Converters for Standalone Photovoltaic Systems. IEEE Trans. Power Electron. 2019, 34, 1394–1406. [Google Scholar] [CrossRef]
- Mira, M.C.; Zhang, Z.; Jørgensen, K.L.; Andersen, M.A.E. Fractional Charging Converter with High Efficiency and Low Cost for Electrochemical Energy Storage Devices. IEEE Trans. Ind. Appl. 2019, 55, 7461–7470. [Google Scholar] [CrossRef]
- Wang, J.; Sun, K.; Xue, C.; Liu, T.; Li, Y. Multi-Port DC-AC Converter with Differential Power Processing DC-DC Converter and Flexible Power Control for Battery ESS Integrated PV Systems. IEEE Trans. Ind. Electron. 2021. early access. [Google Scholar]
- Kim, N.; Biglarbegian, M.; Parkhideh, B. Flexible high efficiency battery-ready PV inverter for rooftop systems. In Proceedings of the 2018 IEEE Applied Power Electronics Conference and Exposition (APEC), San Antonio, TX, USA, 4–8 March 2018. [Google Scholar]
- Sami, I.; Ullah, N.; Muyeen, S.M.; Techato, K.; Chowdhury, M.S.; Ro, J.S. Control Methods for Standalone and Grid Connected Micro-Hydro Power Plants with Synthetic Inertia Frequency Support: A Comprehensive Review. IEEE Access 2020, 8, 176313–176329. [Google Scholar] [CrossRef]
- Karpana, S.; Batzelis, E.; Maiti, S. Modeling and Analysis of Zig-Zag Boost Converter for Battery Charging Applications. In Proceedings of the 2020 IEEE 9th Power India International Conference (PIICON), Sonepat, India, 28 February–1 March 2020. [Google Scholar]
- Parmar, K.P.S.; Majhi, S.; Kothari, D.P. Load frequency control of a realistic power system with multi-source power generation. Int. J. Electr. Power Energy Syst. 2012, 42, 426–433. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System/Parameters | Ratings |
|---|---|
| PV capacity at STC | 10 kWp, 500 V, 20 Amps |
| Grid parameters | Three Phase, 400 V rms, 50 Hz |
| SC storage capacity | 22 kJ, 19.33 F, 48 V, 170 Amps (peak) |
| DC link voltage | 700 V (Regulated) |
| Boost Converter for MPPT | 10 kW, Input voltage (300 to 700), Output voltage 700 V |
| Three-phase two-level grid-connected VSI | 10 kVA, 700 V DC, 400 V (L-L) rms, 50 Hz |
| SC charge controller | 2 kW, 48 V, 100 Amps |
| Power-Processing Stages | Control Gain |
|---|---|
| Zig-Zag Boost and Semi-Controlled Inverter | Kp = 0.1 and Ki = 40 |
| Boost Converter for PV MPPT | Outer Voltage Loop: Kp = 200 and Ki = 1000 Inner Current Loop: Kp = 0.001 and Ki = 20 |
| 3 Phase Inverter for DC-link voltage control | Outer Voltage Loop: Kp = 10 and Ki = 100 Inner Current Control Loop: Kp = 1 and Ki = 50 |
| Design Parameters | Ratings |
|---|---|
| 10 kWp | |
| 50 Hz | |
| Maximum allowable frequency fluctuation in PU with respect to | PU |
| Time constant of the averaging window for RoCoF | 20 ms |
| 1 | 0.2 Hz/s |
| 1 | 1.5 Hz/s |
| 2 | 2 s |
| 2 | 9 s |
| Design Parameters | Ratings |
|---|---|
| 10 kW | |
| in PU 1 | 0.003 (Corresponds to 150 mHz) |
| 1 | 0.05 |
| 50 Hz | |
| 49.8 Hz | |
| 16.1 s | |
| 49.45 Hz | |
| Ratio of to | 0.214 |
| Case Studies | Parameters |
|---|---|
| Case 1 1 | Constant s |
| Case 2 1 | Constant s |
| Case 3 | Constant s |
| Case 4 | Proposed Dynamic Inertia Concept ) |
| Case Studies | Solar Insolation |
|---|---|
| Case 1 | 1000 Watts/m2 |
| Case 2 | 800 Watts/m2 |
| Case 3 | 600 Watts/m2 |
| Case Studies | Parameters for Frequency Events |
|---|---|
| Case 1 | Hz, , |
| Case 2 | Hz, , |
| Case 3 | Hz, , |
| Event Types | Example Cases |
|---|---|
| Low-Frequency Oscillation alone | Case study 1: Case 4 of Table 5 |
| Under-Frequency Event alone | Case study 2: Case 2 of Table 6 |
| Both as a simultaneous event | Case study 3: Case 1 of Table 7 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Karpana, S.; Batzelis, E.; Maiti, S.; Chakraborty, C. PV-Supercapacitor Cascaded Topology for Primary Frequency Responses and Dynamic Inertia Emulation. Energies 2021, 14, 8347. https://doi.org/10.3390/en14248347
Karpana S, Batzelis E, Maiti S, Chakraborty C. PV-Supercapacitor Cascaded Topology for Primary Frequency Responses and Dynamic Inertia Emulation. Energies. 2021; 14(24):8347. https://doi.org/10.3390/en14248347
Chicago/Turabian StyleKarpana, Sivakrishna, Efstratios Batzelis, Suman Maiti, and Chandan Chakraborty. 2021. "PV-Supercapacitor Cascaded Topology for Primary Frequency Responses and Dynamic Inertia Emulation" Energies 14, no. 24: 8347. https://doi.org/10.3390/en14248347
APA StyleKarpana, S., Batzelis, E., Maiti, S., & Chakraborty, C. (2021). PV-Supercapacitor Cascaded Topology for Primary Frequency Responses and Dynamic Inertia Emulation. Energies, 14(24), 8347. https://doi.org/10.3390/en14248347