
Analysis of Stationary- and Synchronous-Reference Frames for Three-Phase Three-Wire Grid-Connected Converter AC Current Regulators


 , and
, and
Abstract
:1. Introduction
2. Control of Three-Phase Three-Wire Converter
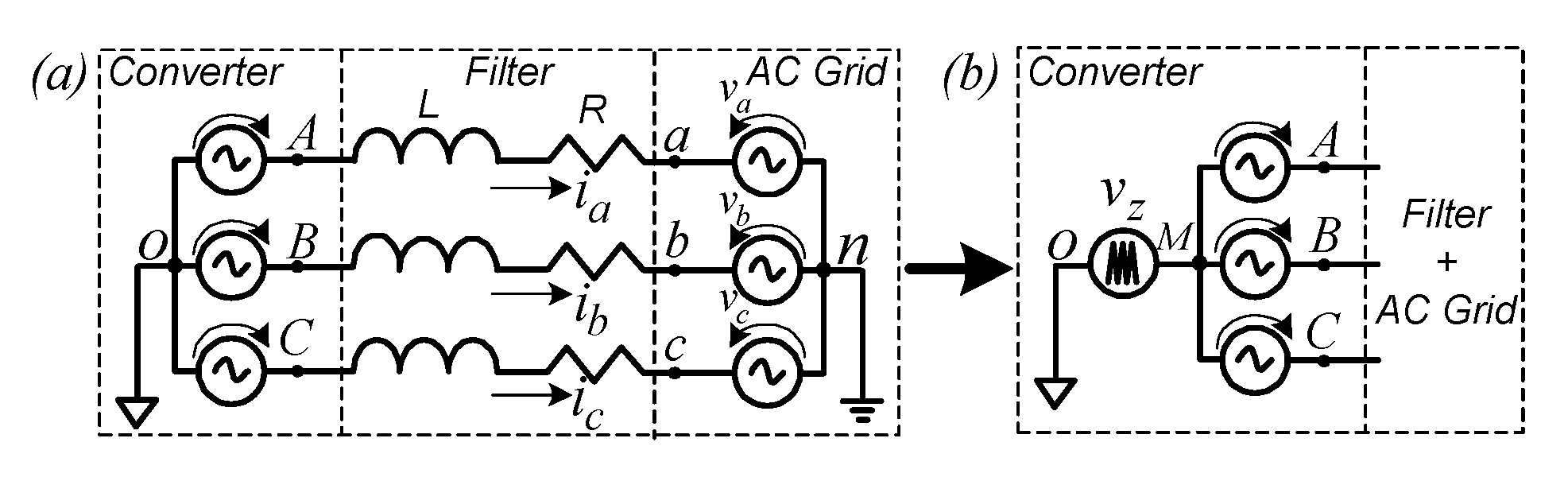
2.1. System Modelling
2.2. Natural Reference Frame Control (abc)
2.3. Orthogonal Stationary Frame Control (αβ)
2.4. Orthogonal Synchronous Frame Control (dq)
3. Control Performance Analysis
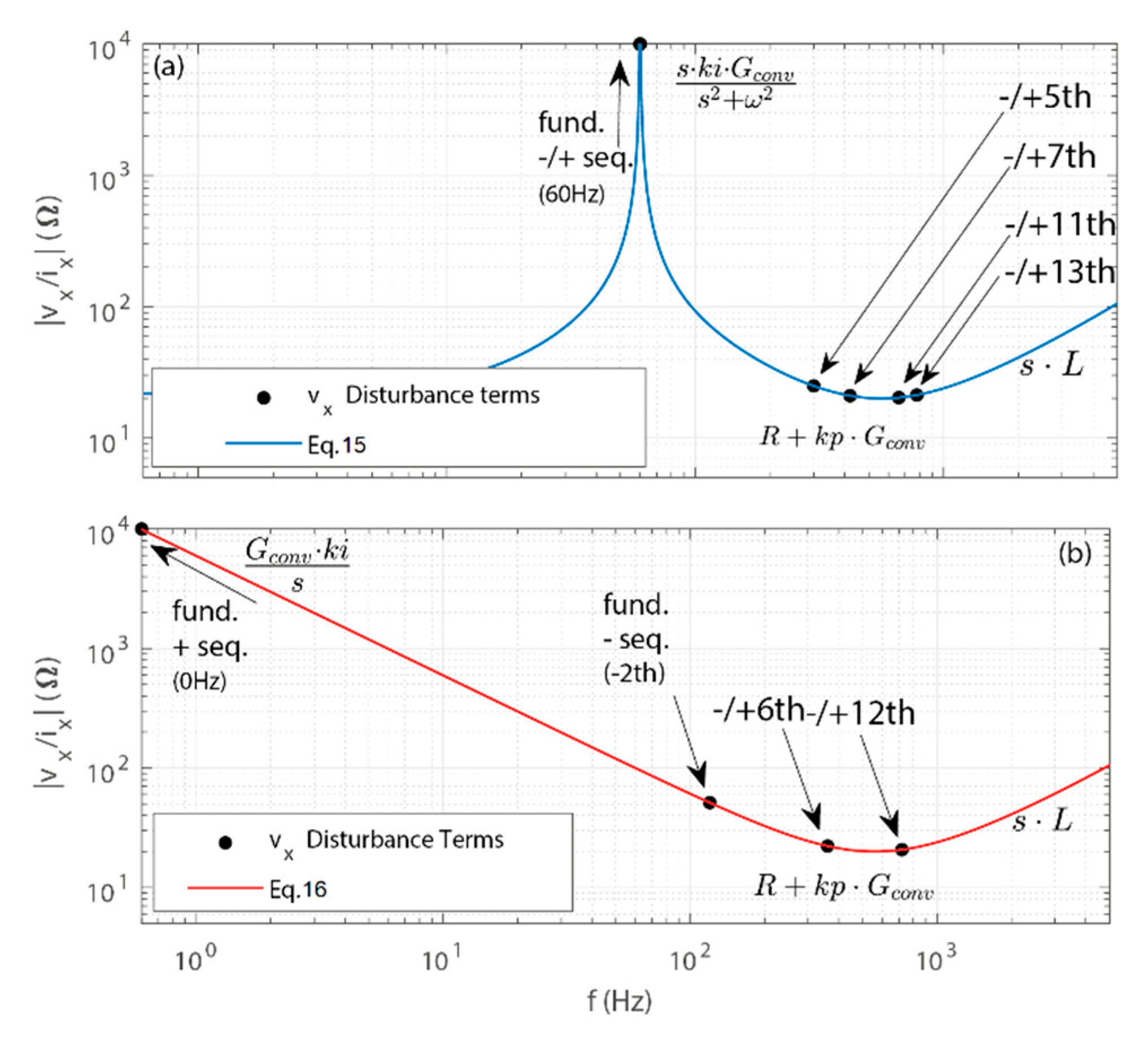
3.1. Basics of Dynamic Stiffness Analysis for Current-Controlled Mode Converter
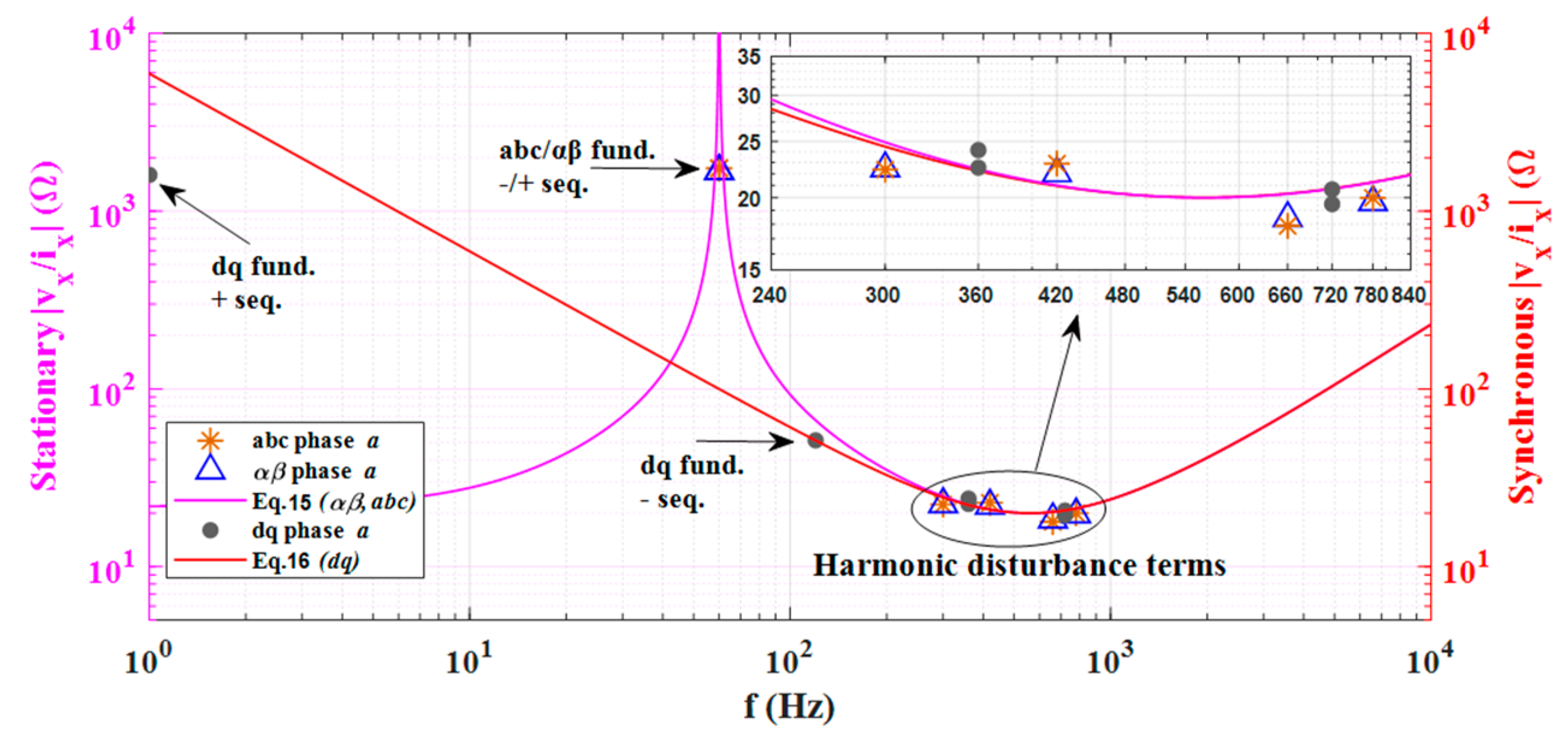
3.2. Case Study of Dynamic Stiffiness Analysis Considering Different Reference Frames
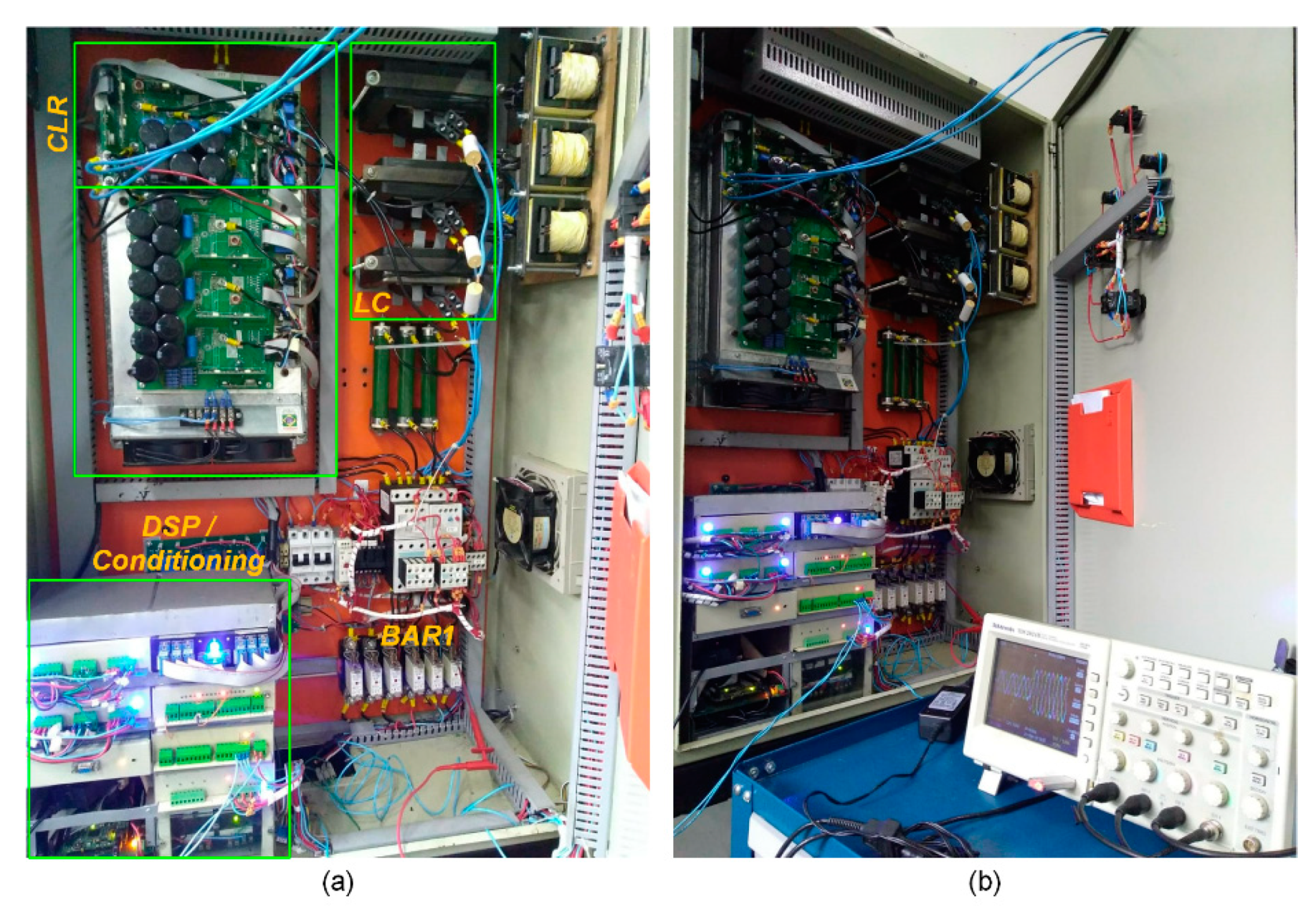
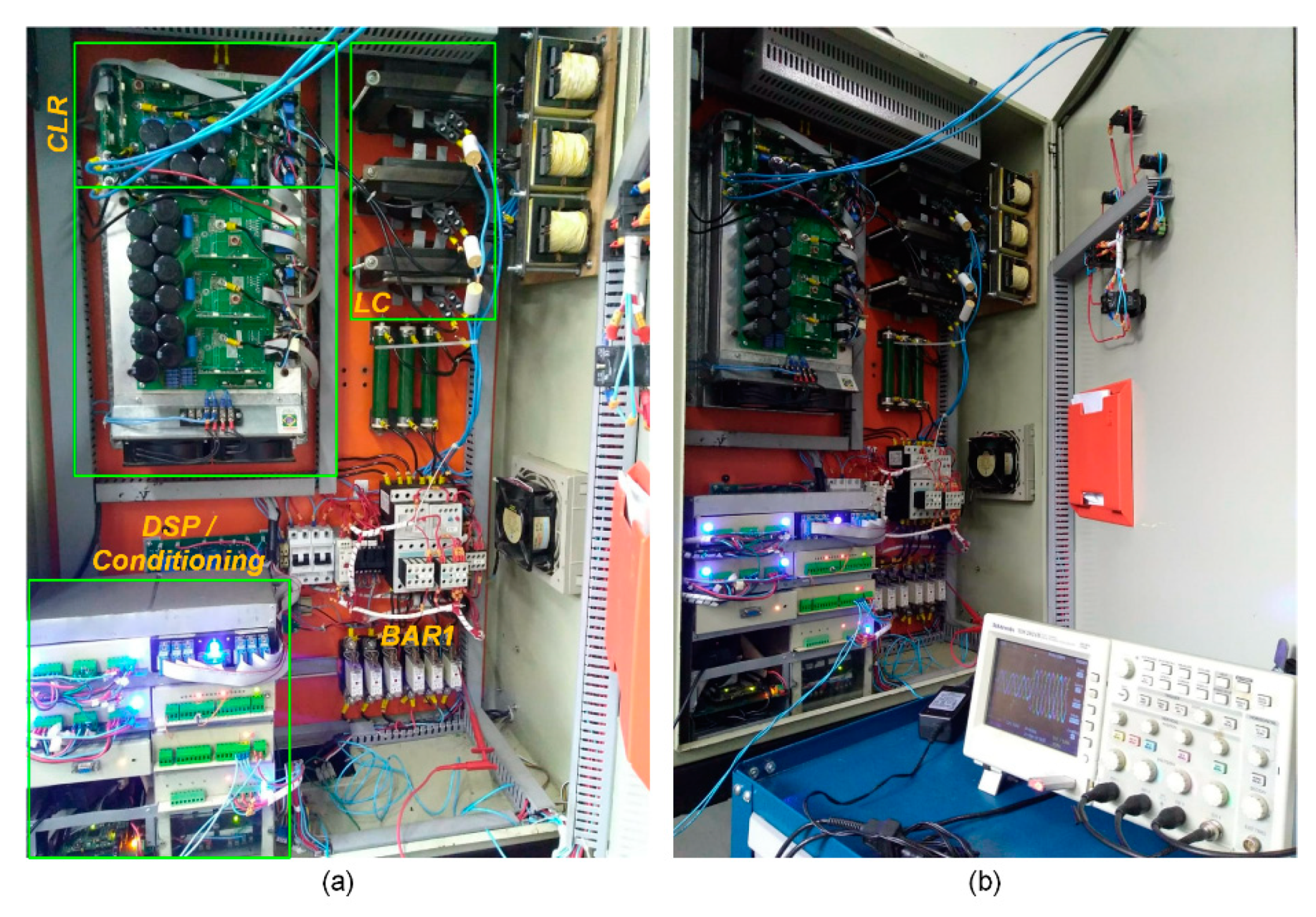
4. Experimental Results
4.1. Dynamic Stiffness Analysis
4.2. Asymmetrical Voltage Sag Analysis
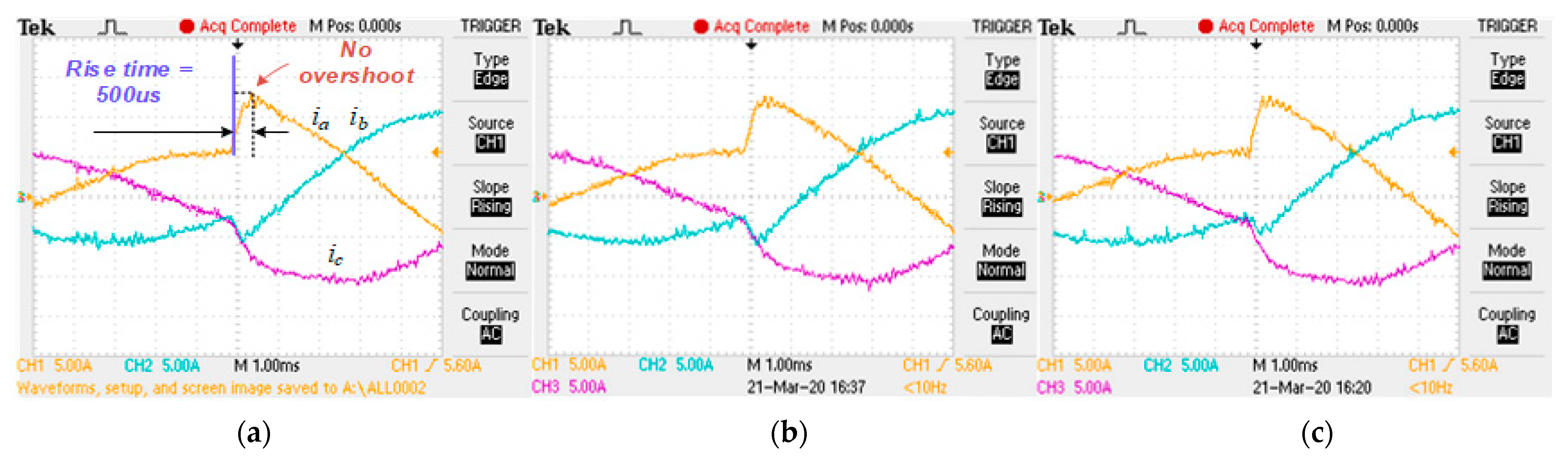
4.3. Transient Analysis
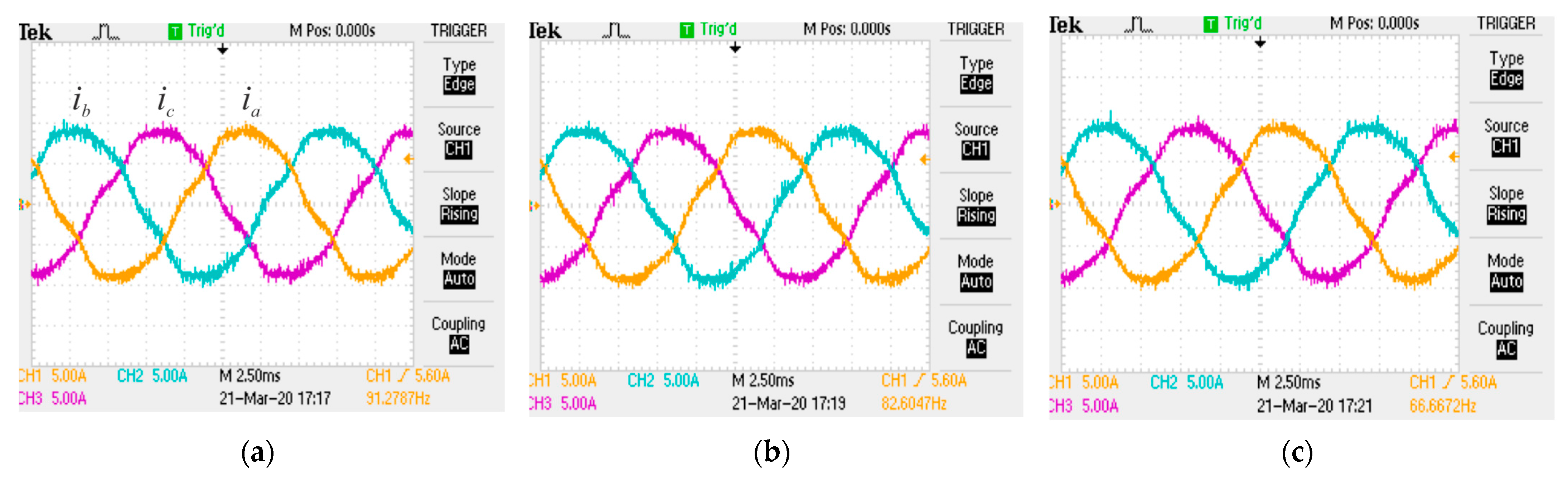
4.4. Steady-State Analysis under Ideal Grid Voltages without Feedforward Compensation of PCC Voltages
4.5. Steady-State Analysis under Distorted Grid Voltages without and with Feedforward Compensation of the PCC Voltages
4.6. Steady-State Analysis under Distorted Grid Voltages and Multi Resonant Current Control
4.7. Computational Effort Assessment
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- IEEE Standards Coordinating Committee. IEEE standard for interconnection and interoperability of distributed energy resources with associated electric power systems interfaces. In IEEE Std 1547-2018; Revision of IEEE Std 1547-2003; IEEE: New York, NY, USA, 2018; pp. 1–138. [Google Scholar]
- Teodorescu, R.; Liserre, M.; Rodriguez, P. Grid Converters for Photovoltaic and Wind Power Systems; John Wiley & Sons: Oxford, UK, 2011. [Google Scholar]
- Callegari, J.; Silva, M.; de Barros, R.; Brito, E.; Cupertino, A.; Pereira, H. Lifetime evaluation of three-phase multifunctional PV inverters with reactive power compensation. Electr. Power Syst. Res. 2019, 175, 105873. [Google Scholar] [CrossRef]
- Amorim, T.S.; Carletti, D.; Encarnação, L.F. Comparison of inverter controllers with synthetic inertia and harmonic compensation features. Electr. Power Syst. Res. 2021, 197, 107344. [Google Scholar] [CrossRef]
- Silva, R.M.; Cupertino, A.F.; Rezende, G.M.; Sousa, C.V.; Mendes, V.F. Power control strategies for grid connected converters applied to full-scale wind energy conversion systems during LVRT operation. Electr. Power Syst. Res. 2020, 184, 106279. [Google Scholar] [CrossRef]
- Zhu, D.; Zhou, S.; Zou, X.; Kang, Y. Improved design of PLL controller for LCL-type grid-connected converter in weak grid. IEEE Trans. Power Electron. 2020, 35, 4715–4727. [Google Scholar] [CrossRef]
- Sukegawa, T.; Ikimi, T.; Matsutake, M.; Kamiyama, K.; Takahashi, J. A multiple PW GTO line-side converter for unity power factor and reduced harmonics. IEEE Trans. Ind. Appl. 1992, 28, 1302–1308. [Google Scholar] [CrossRef]
- Zhou, S.; Zou, X.; Zhu, D.; Tong, L.; Zhao, Y.; Kang, Y.; Yuan, X. An improved design of current controller for LCL-type grid-connected converter to reduce negative effect of PLL in weak grid. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 648–663. [Google Scholar] [CrossRef]
- Mirhosseini, M.; Pou, J.; Karanayil, B.; Agelidis, V.G. Resonant versus conventional controllers in grid-connected photovoltaic power plants under unbalanced grid voltages. IEEE Trans. Sustain. Energy 2016, 7, 1124–1132. [Google Scholar] [CrossRef]
- Ochoa-Giménez, M.; Roldán-Peréz, J.; García-Cerrada, A.; Zamora-Macho, J.L. Efficient multiple-reference-frame controller for harmonic suppression in custom power devices. Int. J. Electr. Power Energy Syst. 2015, 69, 344–353. [Google Scholar] [CrossRef]
- Bahrani, B.; Karimi, A.; Rey, B.; Rufer, A. Decoupled -current control of grid-tied voltage source converters using nonparametric models. IEEE Trans. Ind. Electron. 2013, 60, 1356–1366. [Google Scholar] [CrossRef]
- Zargari, N.R.; Joos, G. Performance investigation of a current-controlled voltage-regulated PWM rectifier in rotating and stationary frames. IEEE Trans. Ind. Electron. 1995, 42, 396–401. [Google Scholar] [CrossRef]
- Montero, M.I.M.; Cadaval, E.R.; Gonzalez, F.B. Comparison of control strategies for shunt active power filters in three-phase four-wire systems. IEEE Trans. Power Electron. 2007, 22, 229–236. [Google Scholar] [CrossRef]
- Wu, R.; Dewan, S.B.; Slemon, G.R. Analysis of an AC-to-DC voltage source converter using PWM with phase and amplitude control. IEEE Trans. Ind. Appl. 1991, 27, 355–364. [Google Scholar] [CrossRef]
- Hayashi, P.H.I.; Matakas, L. Decoupled stationary ABC frame current control of three-phase four-leg four-wire converters. In Proceedings of the Brazilian Power Electronics Conference (COBEP), Juiz de Fora, Brazil, 19–22 November 2017; pp. 1–6. [Google Scholar]
- Holmes, D.G.; Lipo, T.A.; McGrath, B.P.; Kong, W.Y. Optimized design of stationary frame three phase AC current regulators. IEEE Trans. Power Electron. 2009, 24, 2417–2426. [Google Scholar] [CrossRef]
- Buso, S.; Malesani, L.; Mattavelli, P. Comparison of current control techniques for active filter applications. IEEE Trans. Ind. Electron. 1998, 45, 722–729. [Google Scholar] [CrossRef]
- Timbus, A.; Liserre, M.; Teodorescu, R.; Rodriguez, P.; Blaabjerg, F. Evaluation of current controllers for distributed power generation systems. IEEE Trans. Power Electron. 2009, 24, 654–664. [Google Scholar] [CrossRef]
- Kong, W.Y.; Holmes, D.G.; McGrath, B.P. Improved stationary frame AC current regulation using feedforward compensation of the load EMF. In Proceedings of the Twenty-Fourth Annual IEEE Applied Power Electronics Conference and Exposition, Washington, DC, USA, 15–19 February 2009; pp. 145–151. [Google Scholar]
- Chaves, H.; Heldwein, M.L. Grid-tied three-phase inverter current control considering low voltage ride through capability: A comparison between stationary and synchronous reference frames. In Proceedings of the IEEE 11th International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Dubrovnik, Croatia, 28 September–1 October 2020; pp. 57–62. [Google Scholar]
- Lorenz, R.D.; Lipo, T.A.; Novotny, D.W. Motion control with induction motors. Proc. IEEE 1994, 82, 1215–1240. [Google Scholar] [CrossRef]
- Ryan, M.; Brumsickle, W.; Lorenz, R. Control topology options for single-phase UPS inverters. IEEE Trans. Ind. Appl. 1997, 33, 493–501. [Google Scholar] [CrossRef] [Green Version]
- Alonso, A.M.D.S.; Brandao, D.I.; Tedeschi, E.; Marafão, F.P. Distributed selective harmonic mitigation and decoupled unbalance compensation by coordinated inverters in three-phase four-wire low-voltage networks. Electr. Power Syst. Res. 2020, 186, 106407. [Google Scholar] [CrossRef]
- Souza, R.R.; Moreira, A.B.; Barros, T.A.; Ruppert, E. A proposal for a wind system equipped with a doubly fed induction generator using the Conservative Power Theory for active filtering of harmonics currents. Electr. Power Syst. Res. 2018, 164, 167–177. [Google Scholar] [CrossRef]
- Zmood, D.; Holmes, D.; Bode, G. Frequency-domain analysis of three-phase linear current regulators. IEEE Trans. Ind. Appl. 2001, 37, 601–610. [Google Scholar] [CrossRef]
- Buso, S.; Mattavelli, P. Digital Control in Power Electronics, 1st ed.; Morgan & Claypool: San Rafael, CA, USA, 2006. [Google Scholar]
- Song, H.-S.; Nam, K. Dual current control scheme for PWM converter. IEEE Trans. Ind. Electron. 1999, 46, 953–959. [Google Scholar] [CrossRef]
- Moreno, V.M.; Liserre, M.; Pigazo, A.; Dell’Aquila, A. A comparative analysis of real-time algorithms for power signal decomposition in multiple synchronous reference frames. IEEE Trans. Power Electron. 2007, 22, 1280–1289. [Google Scholar] [CrossRef]
- Marin, L.; Tarraso, A.; Candela, I.; Rye, R.; Rodriguez, P. Influence of the ICFF decoupling technique on the stability of the current control loop of a grid-tied VSC. In Proceedings of the IEEE Energy Conversion Congress and Exposition (ECCE), Baltimore, MD, USA, 29 September–3 October 2019; pp. 2622–2628. [Google Scholar]
- Rodriguez, P.; Pou, J.; Bergas, J.; Candela, J.I.; Burgos, R.P.; Boroyevich, D. Decoupled double synchronous reference frame PLL for power converters control. IEEE Trans. Power Electron. 2007, 22, 584–592. [Google Scholar] [CrossRef]
- Zmood, D.; Holmes, D. Stationary frame current regulation of PWM inverters with zero steady state error. IEEE Trans. Power Electron. 2003, 18, 814–822. [Google Scholar] [CrossRef]
- Amini, B.; Roshanfekr, R.; Hajipoor, A.; Mousavi, S.Y.M. Interface converter control of distributed generation in microgrids using fractional proportional—Resonant controller. Electr. Power Syst. Res. 2021, 194, 107097. [Google Scholar] [CrossRef]
- Texas Instruments, Incorporated. C2000™ Digital Controller Library; SPRUI31; Texas Instruments: Dallas, TX, USA, 2015. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Controller | kp [Ω] | ki [Ω/s] | Crossover Freq. | Phase Margin |
|---|---|---|---|---|
| PI (dq) | 21.6 | 37,311 | 900 Hz | 60° |
| PR60Hz (abc/αβ) | 21.6 | 37,311 | 900 Hz | 60° |
| PI (DDSRF-PLL) | 0.742 | 49.5 | 23.2 Hz | 65° |
| Parameter | Value |
|---|---|
| Grid voltage (PCC RMS phase voltage vxn) | 127 V |
| Grid frequency (fgrid) | 60 Hz |
| Grid inductance (Lg) | 1.73 mH |
| Converter rated current (RMS) | 7.87 A |
| Converter rated power | 3 kW |
| DC link voltage (VDC) | 450 V |
| Converter switch frequency (fsw) | 6 kHz |
| DSP control sampling frequency (fsampling) | 12 kHz |
| Converter filter inductance (L) Converter filter resistance (R) Converter filter capacitance (C) | 4 mH 0.157 Ω 1 µF |
| Converter DC capacitance (CDC) | 3.06 mF |
| Proportional gain current control kp | 21.63 Ω |
| Integral gain current control ki | 37311.47 Ω/s |
| Experimental | Theoretical | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Component | abc | αβ | dq | PI dq Model | PR abc/αβ Model | ||||||
| a | b | c | a | b | c | a | b | c | |||
| +Fund. Seq. | 1743 | 1161 | 1192 | 1681 | 1227 | 1147 | 1600 | 1193 | 1393 | ∞ | ∞ |
| –Fund. Seq. | 1743 | 1161 | 1192 | 1681 | 1227 | 1147 | 51.38 | 51.02 | 50.90 | 51.28 | ∞ |
| –5th | 22.35 | 23.77 | 24.84 | 22.46 | 24.07 | 24.82 | 22.53 | 23.78 | 24.44 | 24.48 | 24.91 |
| +7th | 22.88 | 22.70 | 23.06 | 22.03 | 22.10 | 22.90 | 24.16 | 23.22 | 23.88 | 20.95 | 20.99 |
| –11th | 17.87 | 20.26 | 21.04 | 18.43 | 20.70 | 21.45 | 19.45 | 21.86 | 22.25 | 20.32 | 20.30 |
| +13th | 19.97 | 18.10 | 19.24 | 19.64 | 18.07 | 19.52 | 20.67 | 19.28 | 20.46 | 21.27 | 21.24 |
| Experimental Test Considering Voltage Sag | ||||||
|---|---|---|---|---|---|---|
| Ref. | va[V] | vb[V] | vc[V] | ia[A] | ib[A] | ic[A] |
| abc | 30.1 | 127.6 | 127.4 | 0.104 | 0.061 | 0.046 |
| αβ | 30.0 | 127.6 | 127.4 | 0.102 | 0.059 | 0.050 |
| dq | 30.5 | 128.7 | 125.2 | 0.736 | 0.717 | 0.677 |
| Case Study 4.4 | Case Study 4.5a | Case Study 4.5b | Case Study 4.6 | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Leg | abc | αβ | dq | abc | αβ | dq | abc | αβ | dq | abc | αβ | dq |
| a | 1.150 | 1.380 | 1.137 | 4.669 | 4.443 | 4.494 | 3.094 | 2.942 | 2.727 | 1.115 | 1.054 | 1.226 |
| b | 1.378 | 1.550 | 1.312 | 4.384 | 4.695 | 4.477 | 2.983 | 2.806 | 2.936 | 1.110 | 1.167 | 1.043 |
| c | 1.430 | 1.419 | 1.354 | 4.519 | 4.522 | 4.276 | 3.279 | 2.929 | 3.021 | 1.307 | 1.226 | 1.047 |
| Sums | Subtractions | Products | Trigonometric | |
|---|---|---|---|---|
| abc | 5 | 7 | 8 | 2 |
| αβ | 5 | 11 | 17 | 2 |
| dq | 15 | 6 | 16 | 12 |
| abc | αβ | dq | |
|---|---|---|---|
| C-Fund. | 1.69% | 2.45% | 4.13% |
| C-Fund plus Multi control | 4.12% | 4.88% | 5.60% |
| Asm direct-Fund. | 1.06% | 1.93% | 2.66% |
| Asm direct-Fund plus Multi | 2.53% | 3.30% | 3.62% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Costa, I.D.L.; Brandao, D.I.; Matakas Junior, L.; Simões, M.G.; Morais, L.M.F. Analysis of Stationary- and Synchronous-Reference Frames for Three-Phase Three-Wire Grid-Connected Converter AC Current Regulators. Energies 2021, 14, 8348. https://doi.org/10.3390/en14248348
Costa IDL, Brandao DI, Matakas Junior L, Simões MG, Morais LMF. Analysis of Stationary- and Synchronous-Reference Frames for Three-Phase Three-Wire Grid-Connected Converter AC Current Regulators. Energies. 2021; 14(24):8348. https://doi.org/10.3390/en14248348
Chicago/Turabian StyleCosta, Israel D. L., Danilo I. Brandao, Lourenço Matakas Junior, Marcelo G. Simões, and Lenin M. F. Morais. 2021. "Analysis of Stationary- and Synchronous-Reference Frames for Three-Phase Three-Wire Grid-Connected Converter AC Current Regulators" Energies 14, no. 24: 8348. https://doi.org/10.3390/en14248348
APA StyleCosta, I. D. L., Brandao, D. I., Matakas Junior, L., Simões, M. G., & Morais, L. M. F. (2021). Analysis of Stationary- and Synchronous-Reference Frames for Three-Phase Three-Wire Grid-Connected Converter AC Current Regulators. Energies, 14(24), 8348. https://doi.org/10.3390/en14248348