
Traffic Intersection Lane Control Using Radio Frequency Identification and 5G Communication


Abstract
:1. Introduction
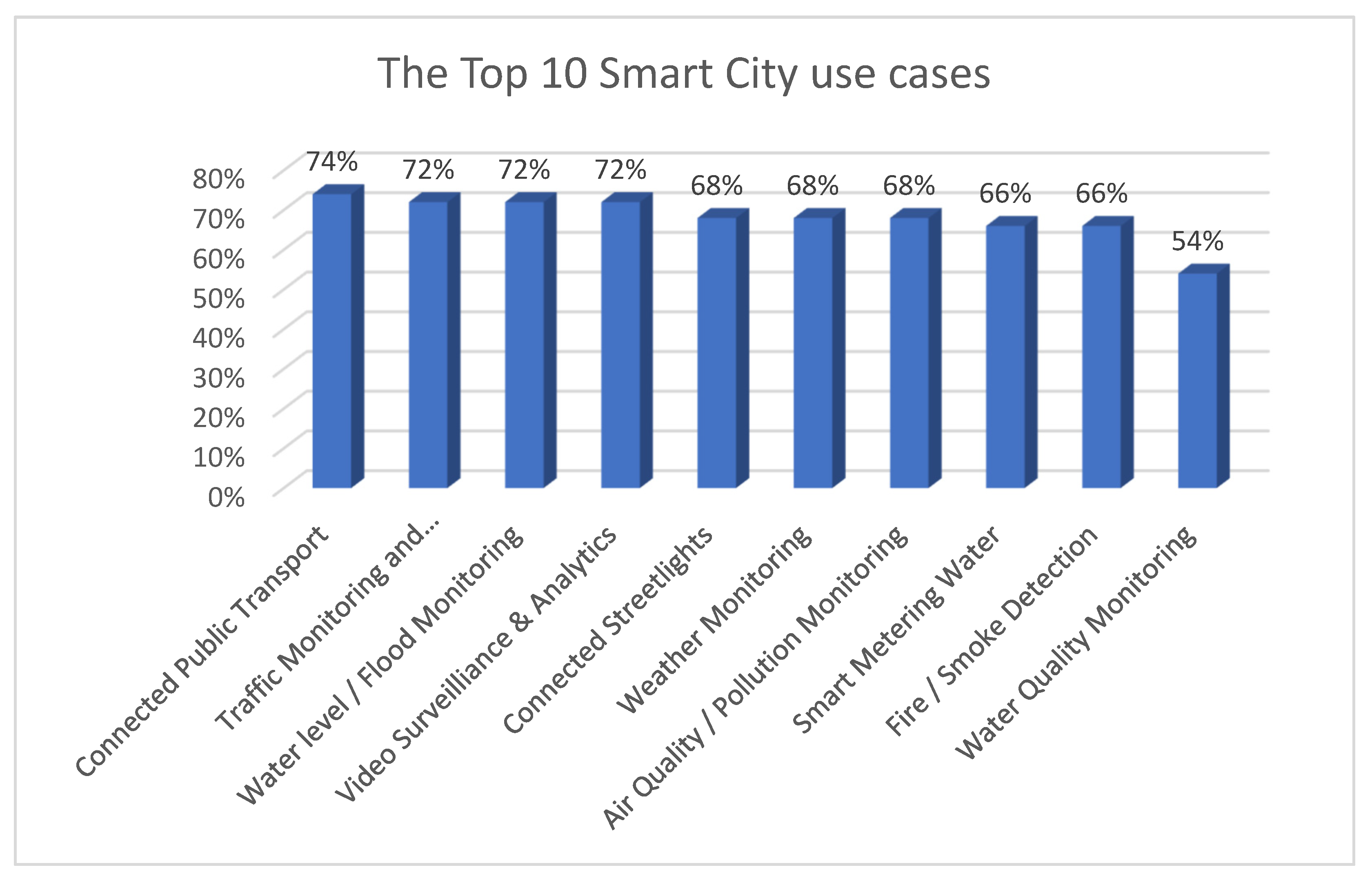
2. Smart Cities and Traffic
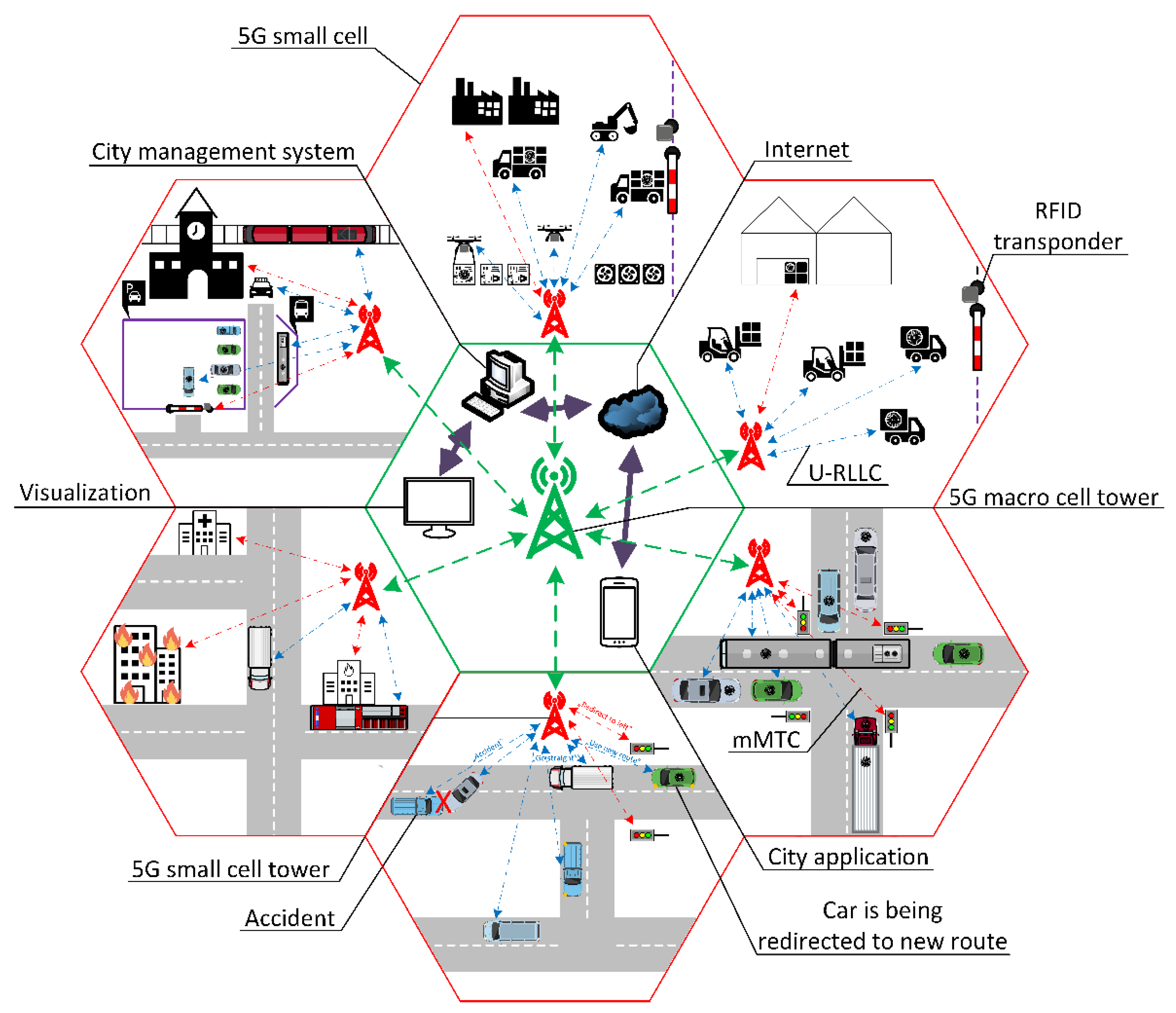
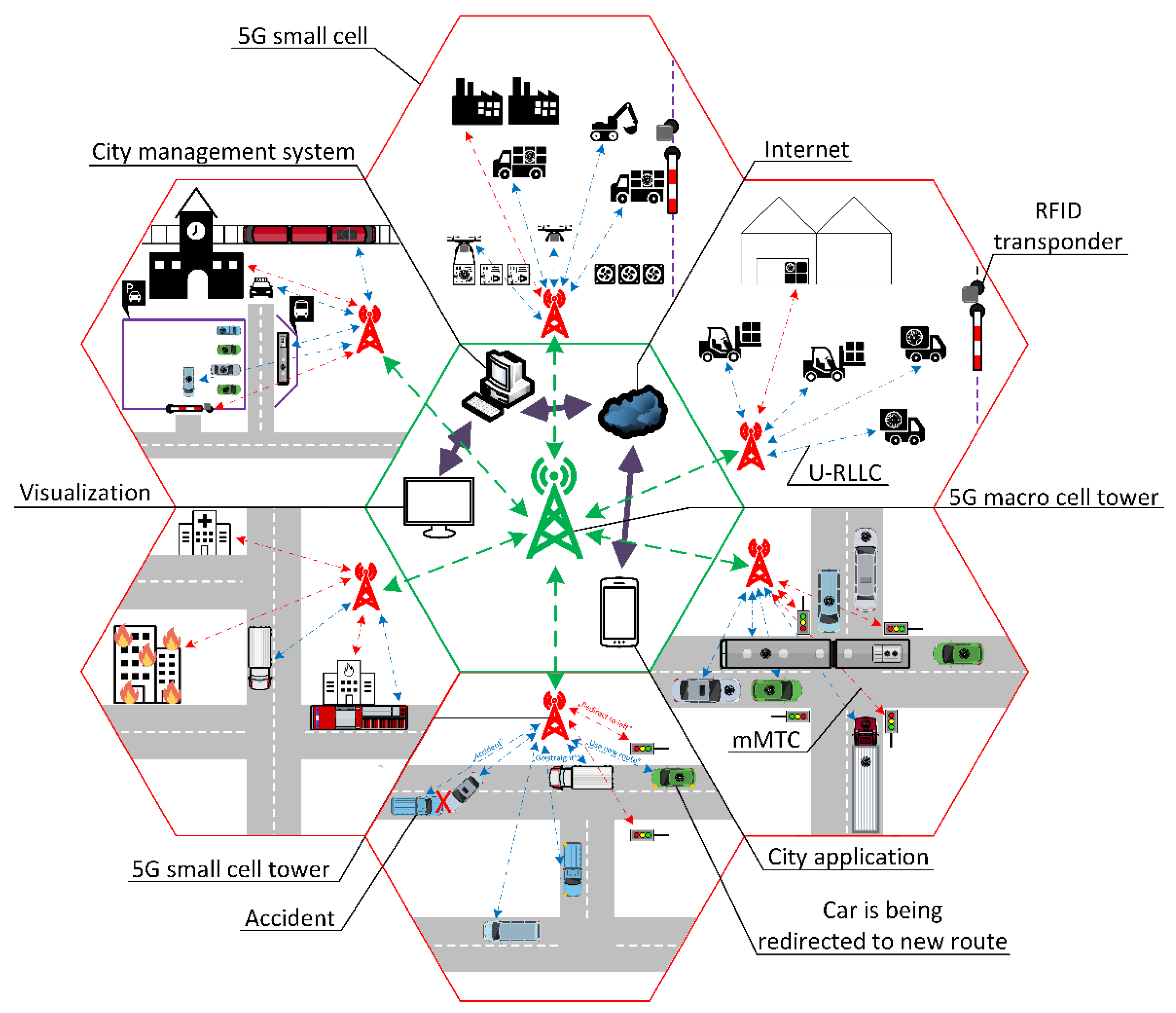
3. Usage of 5G Network
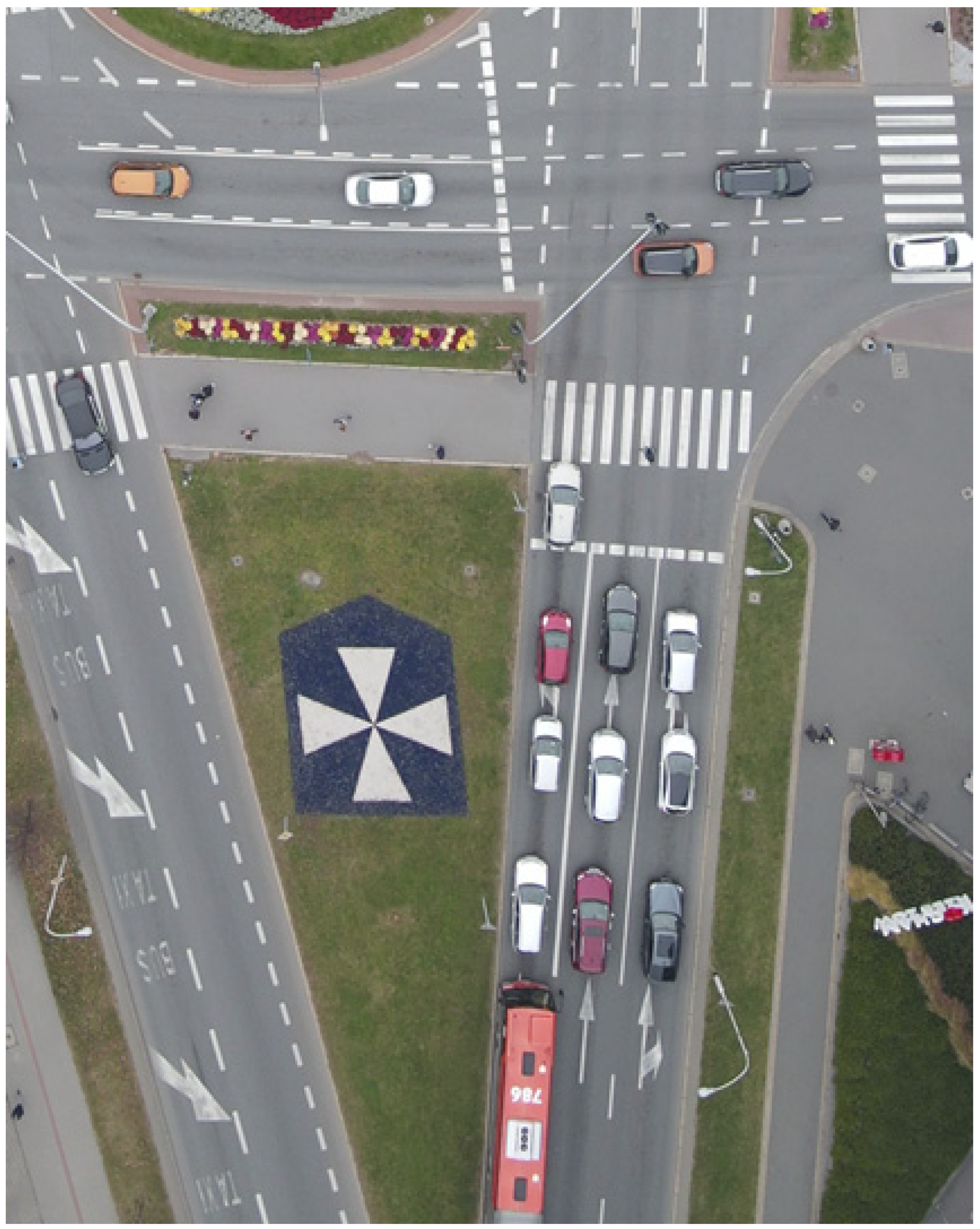
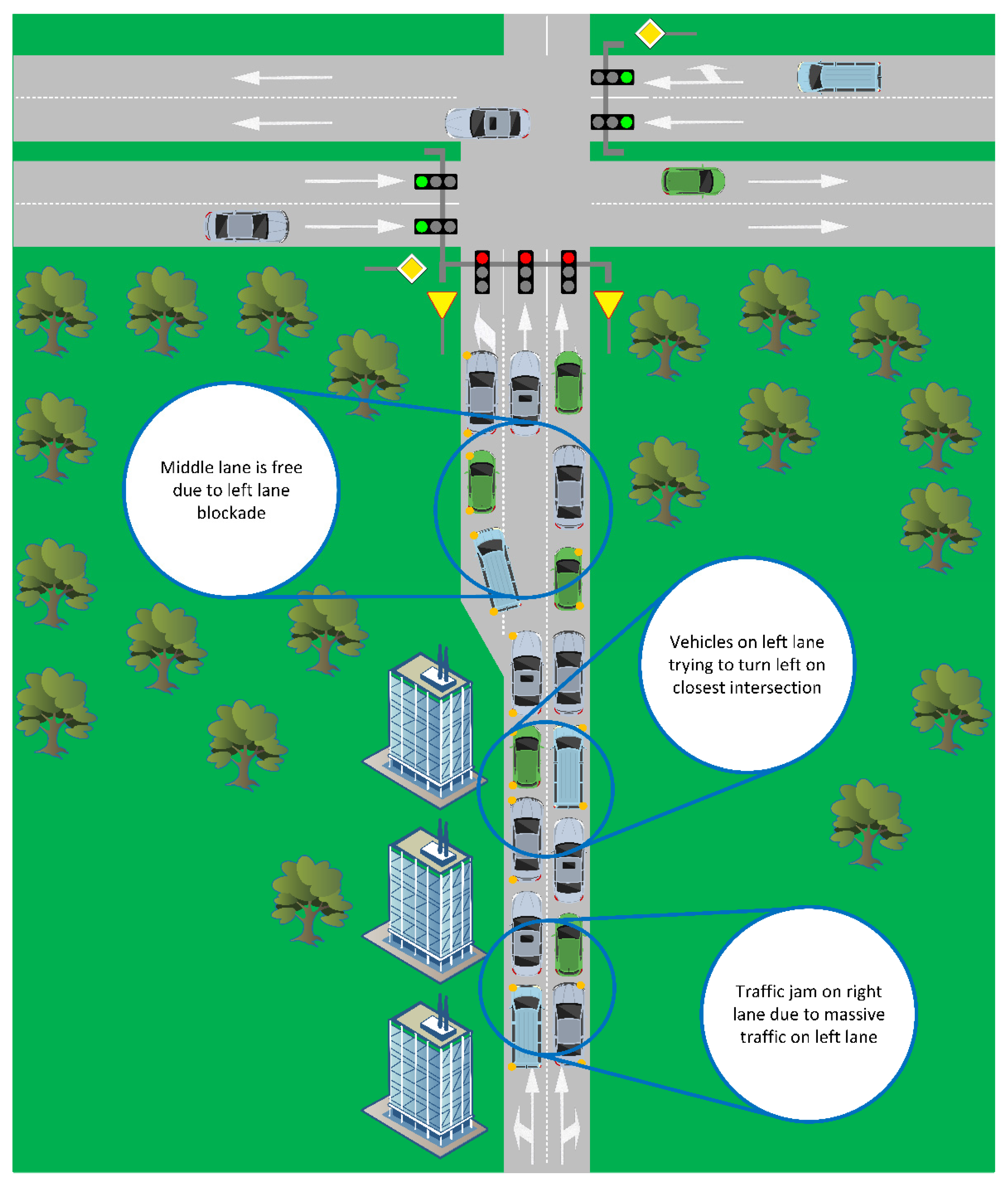
4. Traffic Management Issues
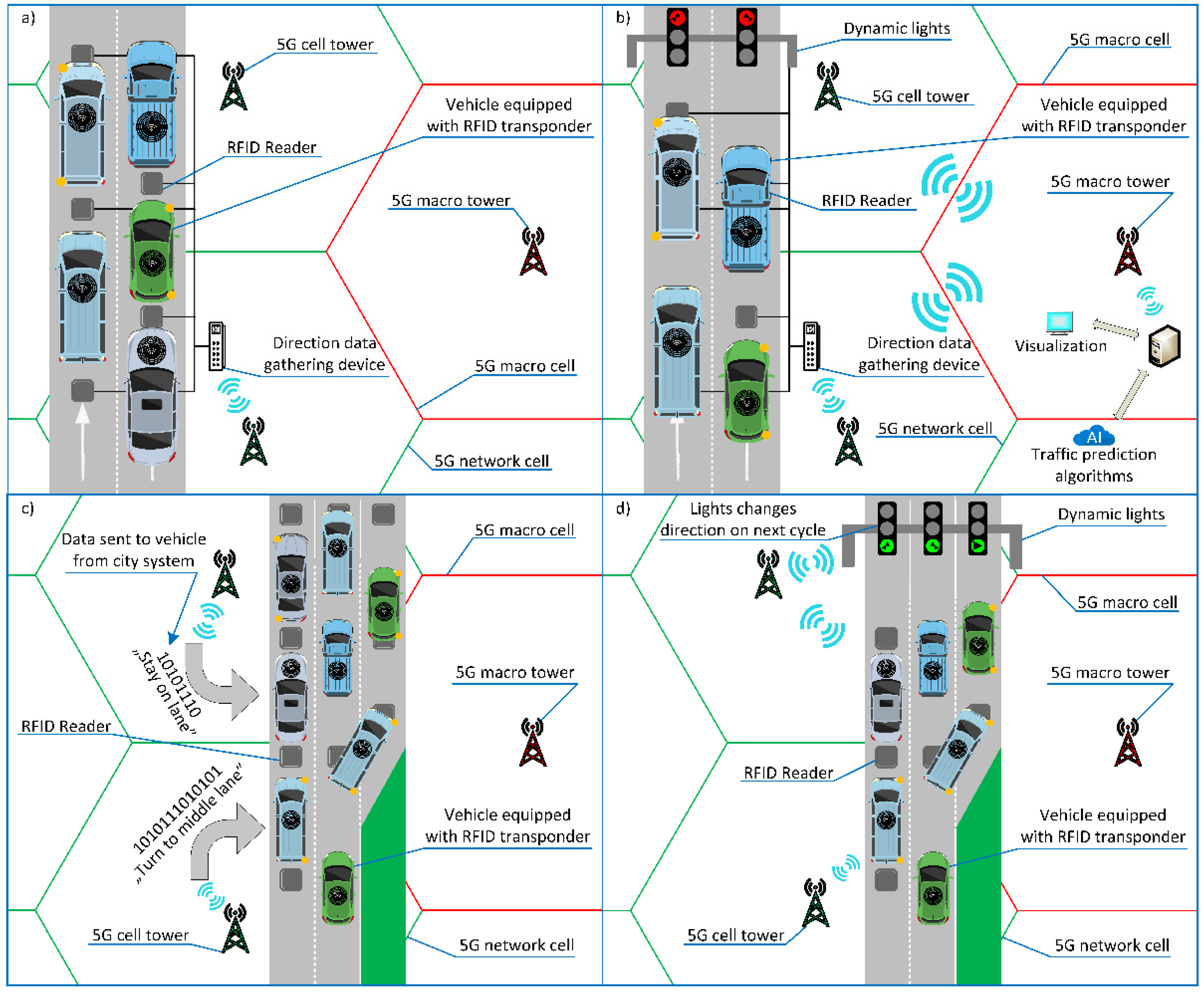
5. RFID Application for Traffic Management
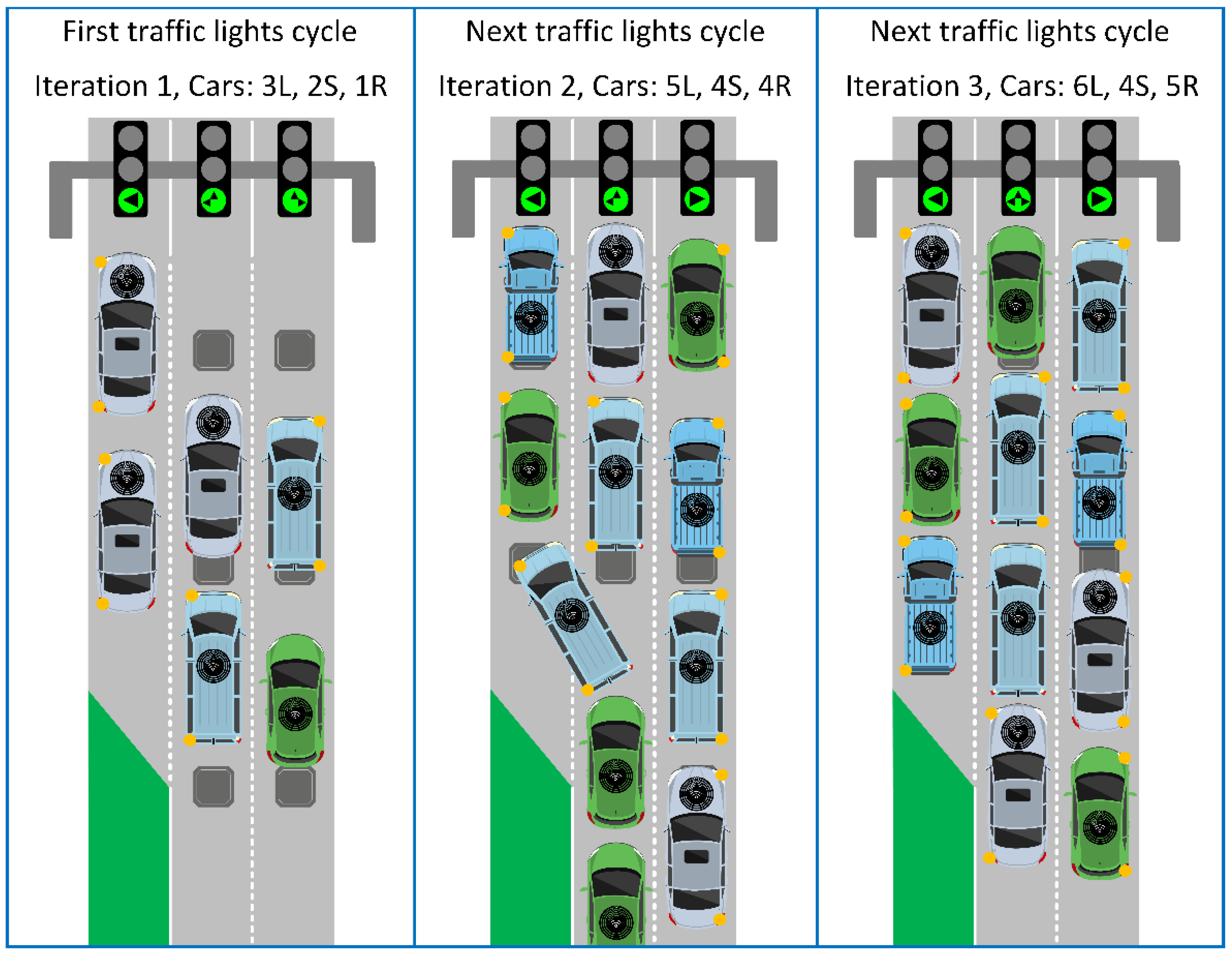
6. Intersection Control Model
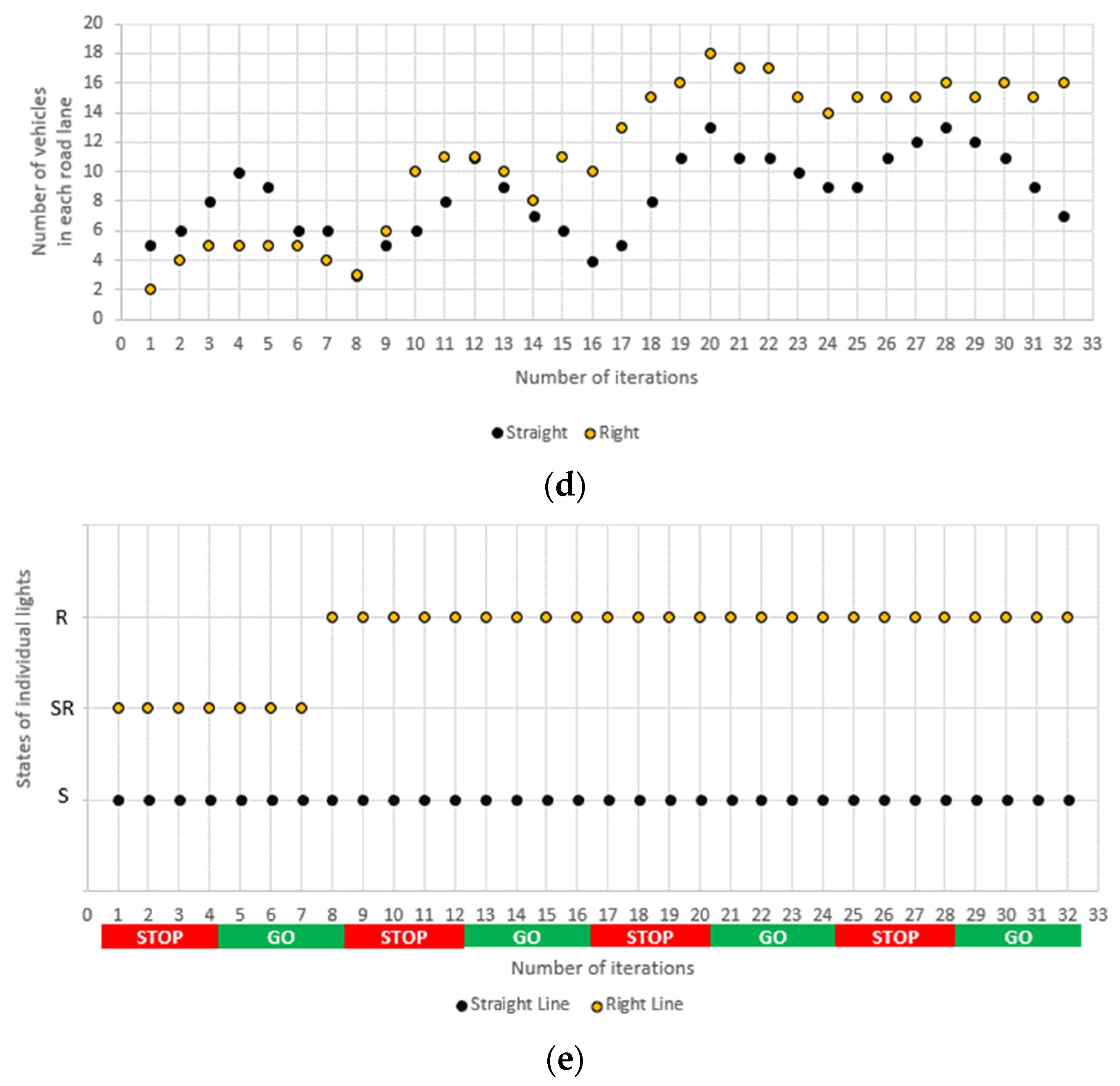
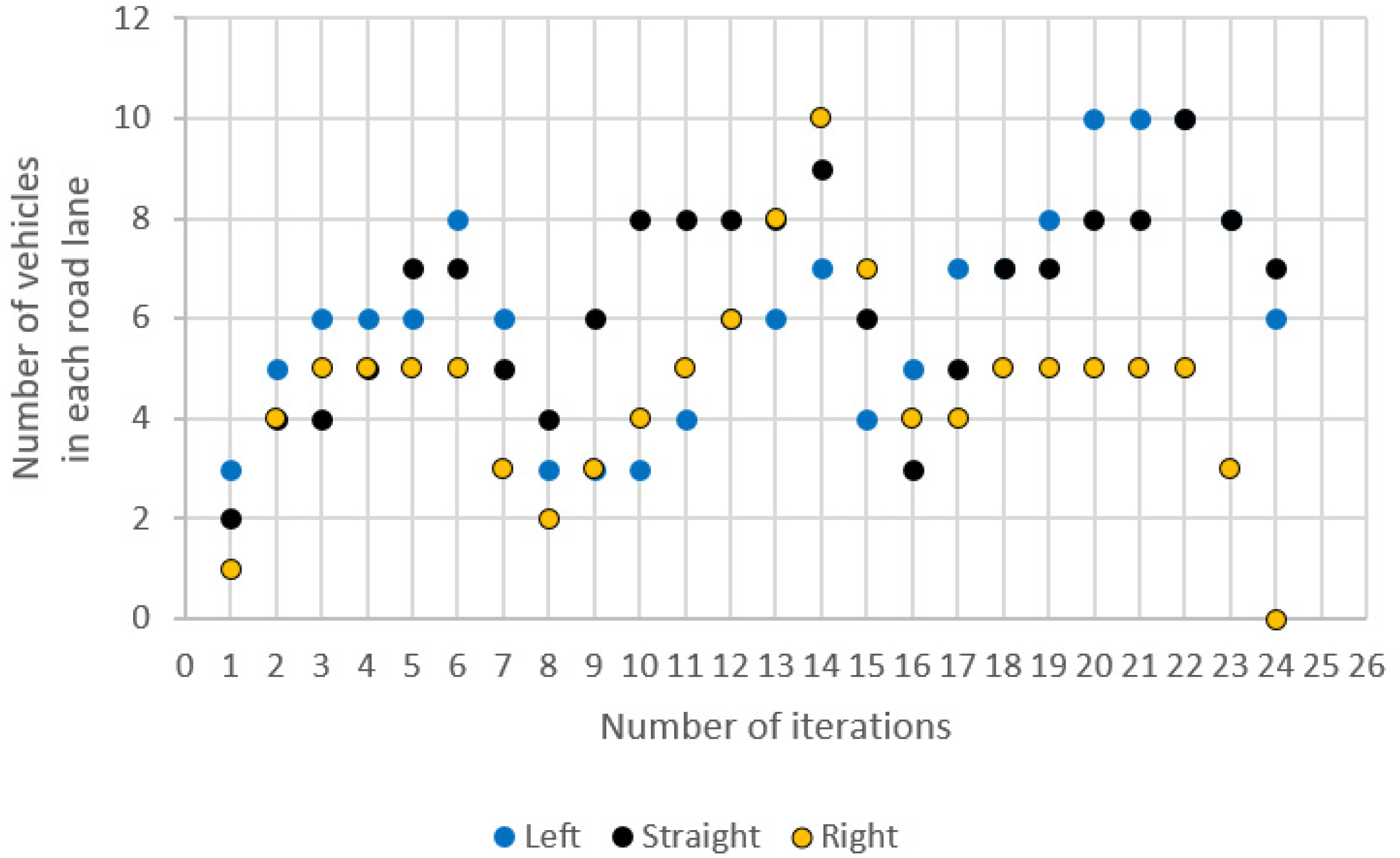
7. Simulation and Results
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- McClellan, S.; Jimenez, J.; Koutitas, G. Smart Cities: Applications, Technologies, Standards, and Driving Factors; Springer International Publishing: Berlin/Heidelberg, Germany, 2018. [Google Scholar]
- An, S.-H.; Lee, B.-H.; Shin, D.-R. A Survey of Intelligent Transportation Systems. In Proceedings of the 2011 Third International Conference on Computational Intelligence, Communication Systems and Networks, Bali, Indonesia, 26–28 July 2011; pp. 332–337. [Google Scholar] [CrossRef]
- Etezadzadeh, C. Smart City—Future City?: Smart City 2.0 as a Livable City and Future Market; Essentials; Springer Fachmedien Wiesbaden: Wiesbaden, Germany, 2015. [Google Scholar]
- Goudar, R.H.; Megha, H.N. Next generation intelligent traffic management system and analysis for smart cities. In Proceedings of the 2017 International Conference on Smart Technologies for Smart Nation (SmartTechCon), Bengaluru, India, 17–19 August 2017; pp. 999–1003. [Google Scholar] [CrossRef]
- Ksiksi, A.; Al Shehhi, S.; Ramzan, R. Intelligent Traffic Alert System for Smart Cities. In Proceedings of the 2015 IEEE International Conference on Smart City/SocialCom/SustainCom (SmartCity), Chengdu, China, 19–21 December 2015; pp. 165–169. [Google Scholar] [CrossRef]
- Haroon, P.S.A.L.; Eranna, U.; Irudayaraj, I.R.; Ulaganathan, J.; Harish, R. Paradoxical monitoring of urban areas & mailbags tracking system using RFID & GPS. In Proceedings of the 2017 International Conference on Electrical, Electronics, Communication, Computer, and Optimization Techniques (ICEECCOT), Mysuru, India, 15–16 December 2017; pp. 1–4. [Google Scholar] [CrossRef]
- Ukkonen, L.; Sydänheimo, L.; Kivikoski, M. Read Range Performance Comparison of Compact Reader Antennas for a Handheld UHF RFID Reader. In Proceedings of the 2007 IEEE International Conference on RFID, Grapevine, TX, USA, 26–28 March 2007; pp. 63–70. [Google Scholar] [CrossRef]
- Jankowski-Mihułowicz, P.; Węglarski, M. Definition, Characteristics and Determining Parameters of Antennas in Terms of Synthesizing the Interrogation Zone in RFID Systems. In Radio Frequency Identification; IntechOpen: London, UK, 2017. [Google Scholar] [CrossRef] [Green Version]
- Węglarski, M.; Jankowski-Mihułowicz, P. Factors Affecting the Synthesis of Autonomous Sensors with RFID Interface. Sensors 2019, 19, 4392. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bernas, M.; Płaczek, B.; Smyła, J. A Neuroevolutionary Approach to Controlling Traffic Signals Based on Data from Sensor Network. Sensors 2019, 19, 1776. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chu, T.; Wang, J.; Codeca, L.; Li, Z. Multi-Agent Deep Reinforcement Learning for Large-Scale Traffic Signal Control. IEEE Trans. Intell. Transp. Syst. 2020, 21, 1086–1095. [Google Scholar] [CrossRef] [Green Version]
- Zhou, P.; Chen, X.; Liu, Z.; Braud, T.; Hui, P.; Kangasharju, J. DRLE: Decentralized Reinforcement Learning at the Edge for Traffic Light Control in the IoV. IEEE Trans. Intell. Transp. Syst. 2020, 22, 2262–2273. [Google Scholar] [CrossRef]
- Fisher, D.S.; Fröhlich, J.; Spencer, T. The Ising model in a random magnetic field. J. Stat. Phys. 1984, 34, 863–870. [Google Scholar] [CrossRef]
- Cipra, B.A. An Introduction to the Ising Model. Am. Math. Mon. 1987, 94, 937–959. [Google Scholar] [CrossRef]
- Singh, S.P. The Ising Model: Brief Introduction and Its Application; IntechOpen: London, UK, 2020; p. 19. [Google Scholar] [CrossRef] [Green Version]
- Gozdur, R. Study of Quasi-Static Magnetization with the Random-Field Ising Model. Algorithms 2020, 13, 134. [Google Scholar] [CrossRef]
- Dorogovtsev, S.N.; Goltsev, A.V.; Mendes, J.F.F. Potts model on complex networks. Eur. Phys. J. B 2004, 38, 177–182. [Google Scholar] [CrossRef] [Green Version]
- Hors, I.; Lordon, F. About some formalisms of interaction Phase transition models in economics? J. Evol. Econ. 1997, 7, 355–373. [Google Scholar] [CrossRef]
- Li, C.; Liu, F.; Li, P. Ising Model of User Behavior Decision in Network Rumor Propagation. Discret. Dyn. Nat. Soc. 2018, 2018, 1–10. [Google Scholar] [CrossRef]
- Liu, S.; Ying, L.; Shakkottai, S. Influence maximization in social networks: An ising-model-based approach. In Proceedings of the 2010 48th Annual Allerton Conference on Communication, Control, and Computing (Allerton), Monticello, IL, USA, 29 September–1 October 2010; pp. 570–576. [Google Scholar]
- Antonio, K.E.S.; Pinol, C.M.N.; Banzon, R.S. An Ising Model Approach to Malware Epidemiology. Available online: https://arxiv.org/abs/1007.4938 (accessed on 7 June 2021).
- Assa, A.; Jahan, M.V. Adaptive Scheduling in Wireless Sensor Networks Based on Potts Model. Am. J. Intell. Syst. 2012, 2, 157–162. [Google Scholar] [CrossRef]
- Paszkiewicz, A.; Węgrzyn, J. Responsiveness of the Sensor Network to Alarm Events Based on the Potts Model. Sensors 2020, 20, 6979. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Xia, Y. I-CSMA: A Link-Scheduling Algorithm for Wireless Networks Based on Ising Model. IEEE Trans. Control. Netw. Syst. 2018, 5, 1038–1050. [Google Scholar] [CrossRef]
- Lai, J.W.; Chang, J.; Ang, L.K.; Cheong, K.H. Multi-level information fusion to alleviate network congestion. Inf. Fusion 2020, 63, 248–255. [Google Scholar] [CrossRef]
- Suzuki, H.; Imura, J.-I.; Aihara, K. Chaotic Ising-like dynamics in traffic signals. Sci. Rep. 2013, 3, srep01127. [Google Scholar] [CrossRef] [PubMed]
- Hussain, H.; Bin Javaid, M.; Khan, F.S.; Dalal, A.; Khalique, A. Optimal control of traffic signals using quantum annealing. Quantum Inf. Process. 2020, 19, 1–18. [Google Scholar] [CrossRef]
- Salgues, B. The City and Mobility 3.0. In Society 5.0: Industry of the Future, Technologies, Methods and Tools; Wiley: Hoboken, NJ, USA, 2018; pp. 67–74. [Google Scholar] [CrossRef]
- LugoSantiago, J.A. Is There Such a Thing as the Smart City 1.0, 2.0, or 3.0? In Leadership and Strategic Foresight in Smart Cities; Palgrave Macmillan: Cham, Switzerland, 2020; pp. 33–42. [Google Scholar] [CrossRef]
- Szarek-Iwaniuk, P.; Senetra, A. Access to ICT in Poland and the Co-Creation of Urban Space in the Process of Modern Social Participation in a Smart City—A Case Study. Sustainability 2020, 12, 2136. [Google Scholar] [CrossRef] [Green Version]
- Zhao, S.; Wang, C.; Wei, P.; Zhao, Q. Research on the Deep Recognition of Urban Road Vehicle Flow Based on Deep Learning. Sustainability 2020, 12, 7094. [Google Scholar] [CrossRef]
- Pillai, U.K.K.; Valles, D. Vehicle Type and Color Classification and Detection for Amber and Silver Alert Emergencies Using Machine Learning. In Proceedings of the 2020 IEEE International IOT, Electronics and Mechatronics Conference (IEMTRONICS), Vancouver, BC, Canada, 9–12 September 2020; pp. 1–5. [Google Scholar]
- Pawłowicz, B.; Trybus, B.; Salach, M.; Jankowski-Mihułowicz, P. Dynamic RFID Identification in Urban Traffic Management Systems. Sensors 2020, 20, 4225. [Google Scholar] [CrossRef] [PubMed]
- Martín, J.; Khatib, E.J.; Lázaro, P.; Barco, R. Traffic Monitoring via Mobile Device Location. Sensors 2019, 19, 4505. [Google Scholar] [CrossRef] [Green Version]
- Pawłowicz, B.; Salach, M.; Trybus, B. Infrastructure of RFID-Based Smart City Traffic Control System. Adv. Intell. Syst. Comput. 2019, 920, 86–198. [Google Scholar] [CrossRef]
- Barthélemy, J.; Verstaevel, N.; Forehead, H.; Perez, P. Edge-Computing Video Analytics for Real-Time Traffic Monitoring in a Smart City. Sensors 2019, 19, 2048. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lung, C.; Buchman, A.; Sabou, S. Smart City Emergency Situations Management System Based on Sensors Network. In Proceedings of the 2018 IEEE 24th International Symposium for Design and Technology in Electronic Packaging (SIITME), Iasi, Romania, 25–28 October 2018; pp. 288–291. [Google Scholar] [CrossRef]
- Aidasani, L.K.; Bhadkamkar, H.; Kashyap, A.K. IoT: The kernel of smart cities. In Proceedings of the 2017 Third International Conference on Science Technology Engineering & Management (ICONSTEM), Chennai, India, 23–24 March 2017; pp. 8–11. [Google Scholar] [CrossRef]
- Jabbarpour, M.R.; Nabaei, A.; Zarrabi, H. Intelligent Guardrails: An IoT Application for Vehicle Traffic Congestion Reduction in Smart City. In Proceedings of the 2016 IEEE International Conference on Internet of Things (iThings) and IEEE Green Computing and Communications (GreenCom) and IEEE Cyber, Physical and Social Computing (CPSCom) and IEEE Smart Data (SmartData), Chengdu, China, 15–18 December 2016; pp. 7–13. [Google Scholar]
- Javaid, S.; Sufian, A.; Pervaiz, S.; Tanveer, M. Smart traffic management system using Internet of Things. In Proceedings of the 2018 20th International Conference on Advanced Communication Technology (ICACT), Chuncheon, Korea, 11–14 February 2018; pp. 393–398. [Google Scholar] [CrossRef]
- Gohar, A.; Nencioni, G. The Role of 5G Technologies in a Smart City: The Case for Intelligent Transportation System. Sustainability 2021, 13, 5188. [Google Scholar] [CrossRef]
- Guevara, L.; Auat Cheein, F. The Role of 5G Technologies: Challenges in Smart Cities and Intelligent Transportation Systems. Sustainability 2020, 12, 6469. [Google Scholar] [CrossRef]
- Pasolini, G.; Toppan, P.; Zabini, F.; De Castro, C.; Andrisano, O. Design, Deployment and Evolution of Heterogeneous Smart Public Lighting Systems. Appl. Sci. 2019, 9, 3281. [Google Scholar] [CrossRef] [Green Version]
- Tealab, M.; Hassebo, A.; Dabour, A.; AbdelAziz, M. Smart Cities Digital transformation and 5G—ICT Architecture. In Proceedings of the 2020 11th IEEE Annual Ubiquitous Computing, Electronics & Mobile Communication Conference (UEMCON), New York, NY, USA, 28–31 October 2020; pp. 0421–0425. [Google Scholar] [CrossRef]
- Oproiu, E.-M.; Iordache, M.; Patachia, C.; Costea, C.; Marghescu, I. Development and implementation of a Smart City Use Case in a 5G mobile network’s operator. In Proceedings of the 2017 25th Telecommunication Forum (TELFOR), Belgrade, Serbia, 21–22 November 2017; pp. 1–4. [Google Scholar] [CrossRef]
- Gundall, M.; Strufe, M.; Schotten, H.D.; Rost, P.; Markwart, C.; Blunk, R.; Neumann, A.; Griebbach, J.; Aleksy, M.; Wubben, D. Introduction of a 5G-Enabled Architecture for the Realization of Industry 4.0 Use Cases. IEEE Access 2021, 9, 25508–25521. [Google Scholar] [CrossRef]
- Larranaga, A.; Lucas-Estan, M.C.; Martinez, I.; Val, I.; Gozalvez, J. Analysis of 5G-TSN Integration to Support Industry 4.0. In Proceedings of the 2020 25th IEEE International Conference on Emerging Technologies and Factory Automation (ETFA), Vienna, Austria, 8–11 September 2020; pp. 1111–1114. [Google Scholar]
- Morales, J.G.; Lucas-Estañ, M.C.; Gozalvez, J. Latency-Based 5G RAN Slicing Descriptor to Support Deterministic Industry 4.0 Applications. In Proceedings of the 2019 24th IEEE International Conference on Emerging Technologies and Factory Automation (ETFA), Zaragoza, Spain, 10–13 September 2019; pp. 1359–1362. [Google Scholar]
- Alshaflut, A.; Thayananthan, V. Estimating data traffic through software-defined multiple access for IoT applications over 5G networks. In Proceedings of the 2018 15th Learning and Technology Conference (L&T), Jeddah, Saudi Arabia, 25–26 February 2018; pp. 59–66. [Google Scholar] [CrossRef]
- Moloisane, N.R.; Malekian, R.; Bogatinoska, D.C. Wireless machine-to-machine communication for intelligent transportation systems: Internet of vehicles and vehicle to grid. In Proceedings of the 2017 40th International Convention on Information and Communication Technology, Electronics and Microelectronics (MIPRO), Opatija, Croatia, 22–26 May 2017; pp. 411–415. [Google Scholar]
- Kelechi, A.H.; Alsharif, M.H.; Ramly, A.M.; Abdullah, N.F.; Nordin, R. The Four-C Framework for High Capacity Ultra-Low Latency in 5G Networks: A Review. Energies 2019, 12, 3449. [Google Scholar] [CrossRef] [Green Version]
- Nishamali, T.; Kumarage, M.K. An Overview of 5G Technology. In Proceedings of the 2020 International Conference in Mathematics, Computer Engineering and Computer Science (ICMCECS), Ayobo, Nigeria, 18–21 March 2020. [Google Scholar] [CrossRef]
- Chien, W.-C.; Cho, H.-H.; Lai, C.-F.; Tseng, F.-H.; Chao, H.-C.; Hassan, M.M.; Alelaiwi, A. Intelligent Architecture for Mobile HetNet in B5G. IEEE Netw. 2019, 33, 34–41. [Google Scholar] [CrossRef]
- Sulyman, A.I.; Alwarafy, A.; MacCartney, G.R.; Rappaport, T.; Alsanie, A. Directional Radio Propagation Path Loss Models for Millimeter-Wave Wireless Networks in the 28-, 60-, and 73-GHz Bands. IEEE Trans. Wirel. Commun. 2016, 15, 6939–6947. [Google Scholar] [CrossRef]
- Federal Communication Commission. Allocation and Service Rules for the 71–76 GHz, 81–86 GHz and 92–95 GHz Bands; Federal Communication Commission: Washington, DC, USA, 2003.
- Federal Communication Commission. Millimeter Wave Propagation: Spectrum Management Implications; Bulletin 70; Federal Communication Commission: Washington, DC, USA, 1997.
- Lockie, D.; Peck, D. High-data-rate millimeter-wave radios. IEEE Microw. Mag. 2009, 10, 75–83. [Google Scholar] [CrossRef]
- Pi, Z.; Khan, F. An introduction to millimeter-wave mobile broadband systems. IEEE Commun. Mag. 2011, 49, 101–107. [Google Scholar] [CrossRef]
- Tufail, A.; Namoun, A.; Sen, A.A.; Kim, K.-H.; Alrehaili, A.; Ali, A. Moisture Computing-Based Internet of Vehicles (IoV) Architecture for Smart Cities. Sensors 2021, 21, 3785. [Google Scholar] [CrossRef] [PubMed]
- Adnan, M.; Iqbal, J.; Waheed, A.; Amin, N.; Zareei, M.; Umer, A.; Mohamed, E. Towards the Design of Efficient and Secure Architecture for Software-Defined Vehicular Networks. Sensors 2021, 21, 3902. [Google Scholar] [CrossRef]
- Kyamakya, K.; Chedjou, J.; Al-Machot, F.; Mosa, A.H.; Bagula, A. Intelligent Transportation Related Complex Systems and Sensors. Sensors 2021, 21, 2235. [Google Scholar] [CrossRef] [PubMed]
- Doğan, S.; Temiz, M.S.; Külür, S. Real Time Speed Estimation of Moving Vehicles from Side View Images from an Uncalibrated Video Camera. Sensors 2010, 10, 4805–4824. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Galletta, A.; Ruggeri, A.; Fazio, M.; Dini, G.; Villari, M. MeSmart-Pro: Advanced Processing at the Edge for Smart Urban Monitoring and Reconfigurable Services. J. Sens. Actuator Netw. 2020, 9, 55. [Google Scholar] [CrossRef]
- Mandal, V.; Mussah, A.R.; Jin, P.; Adu-Gyamfi, Y. Artificial Intelligence-Enabled Traffic Monitoring System. Sustainability 2020, 12, 9177. [Google Scholar] [CrossRef]
- Bui, K.-H.N.; Yi, H.; Cho, J. A Multi-Class Multi-Movement Vehicle Counting Framework for Traffic Analysis in Complex Areas Using CCTV Systems. Energies 2020, 13, 2036. [Google Scholar] [CrossRef] [Green Version]
- Luo, J.; Huang, Y.-S.; Weng, Y.-S. Design of Variable Traffic Light Control Systems for Preventing Two-Way Grid Network Traffic Jams Using Timed Petri Nets. IEEE Trans. Intell. Transp. Syst. 2020, 21, 3117–3127. [Google Scholar] [CrossRef]
- Chen, X.; Qi, L.; Yang, Y.; Luo, Q.; Postolache, O.; Tang, J.; Wu, H. Video-Based Detection Infrastructure Enhancement for Automated Ship Recognition and Behavior Analysis. J. Adv. Transp. 2020, 2020, 7194342. [Google Scholar] [CrossRef] [Green Version]
- Mora-Mora, H.; Gilart-Iglesias, V.; Gil, D.; Sirvent-Llamas, A. A Computational Architecture Based on RFID Sensors for Traceability in Smart Cities. Sensors 2015, 15, 13591–13626. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ustundag, A. The Value of RFID; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Dobkin, D. The RF in RFID: UHF RFID in Practice, 2nd ed.; Newnes: London, UK, 2012; pp. 1–529. [Google Scholar]
- Oya, J.R.G.; Clemente, R.M.; Fort, E.H.; Carvajal, R.G.; Chavero, F.M. Passive RFID-Based Inventory of Traffic Signs on Roads and Urban Environments. Sensors 2018, 18, 2385. [Google Scholar] [CrossRef] [Green Version]
- Pedraza, C.; Vega, F.; Manana, G. PCIV, an RFID-Based Platform for Intelligent Vehicle Monitoring. IEEE Intell. Transp. Syst. Mag. 2018, 10, 28–35. [Google Scholar] [CrossRef]
- Joshi, Y.; Gharate, P.; Ahire, C.; Alai, N.; Sonavane, S. Smart parking management system using RFID and OCR. In Proceedings of the 2015 International Conference on Energy Systems and Applications, Pune, India, 30 October–1 November 2015; pp. 729–734. [Google Scholar]
- Abdulkader, O.; Bamhdi, A.M.; Thayananthan, V.; Jambi, K.; Alrasheedi, M. A novel and secure smart parking management system (SPMS) based on integration of WSN, RFID, and IoT. In Proceedings of the 2018 15th Learning and Technology Conference (L&T), Jeddah, Saudi Arabia, 25–26 February 2018; pp. 102–106. [Google Scholar] [CrossRef]
- Jian, M.S.; Hsu, S. Location Aware Public/Personal Diversity of Information Services based on embedded RFID Platform. In Proceedings of the 2009 11th International Conference on Advanced Communication Technology, Gangwon, Korea, 15–18 February 2009; pp. 1145–1150. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
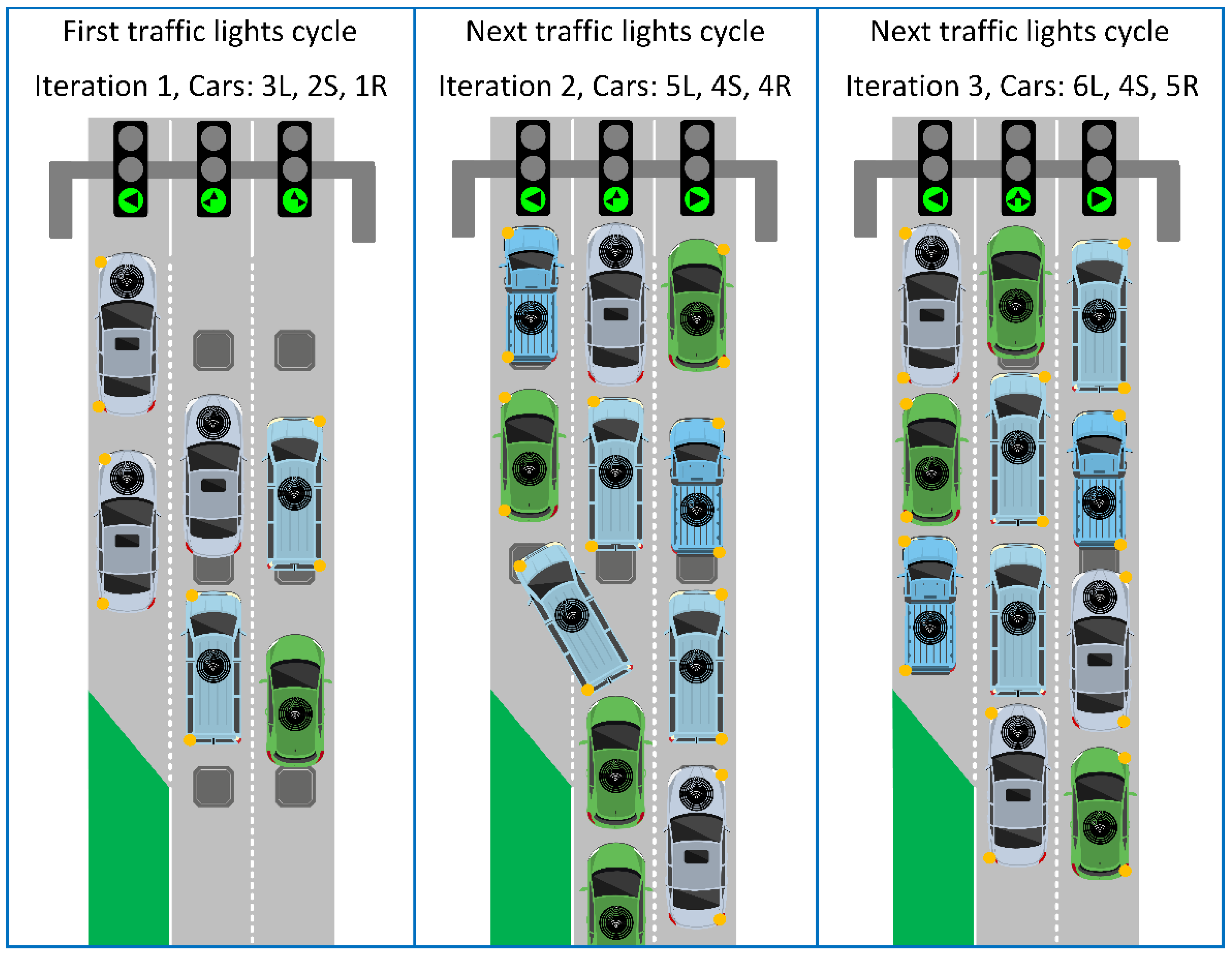
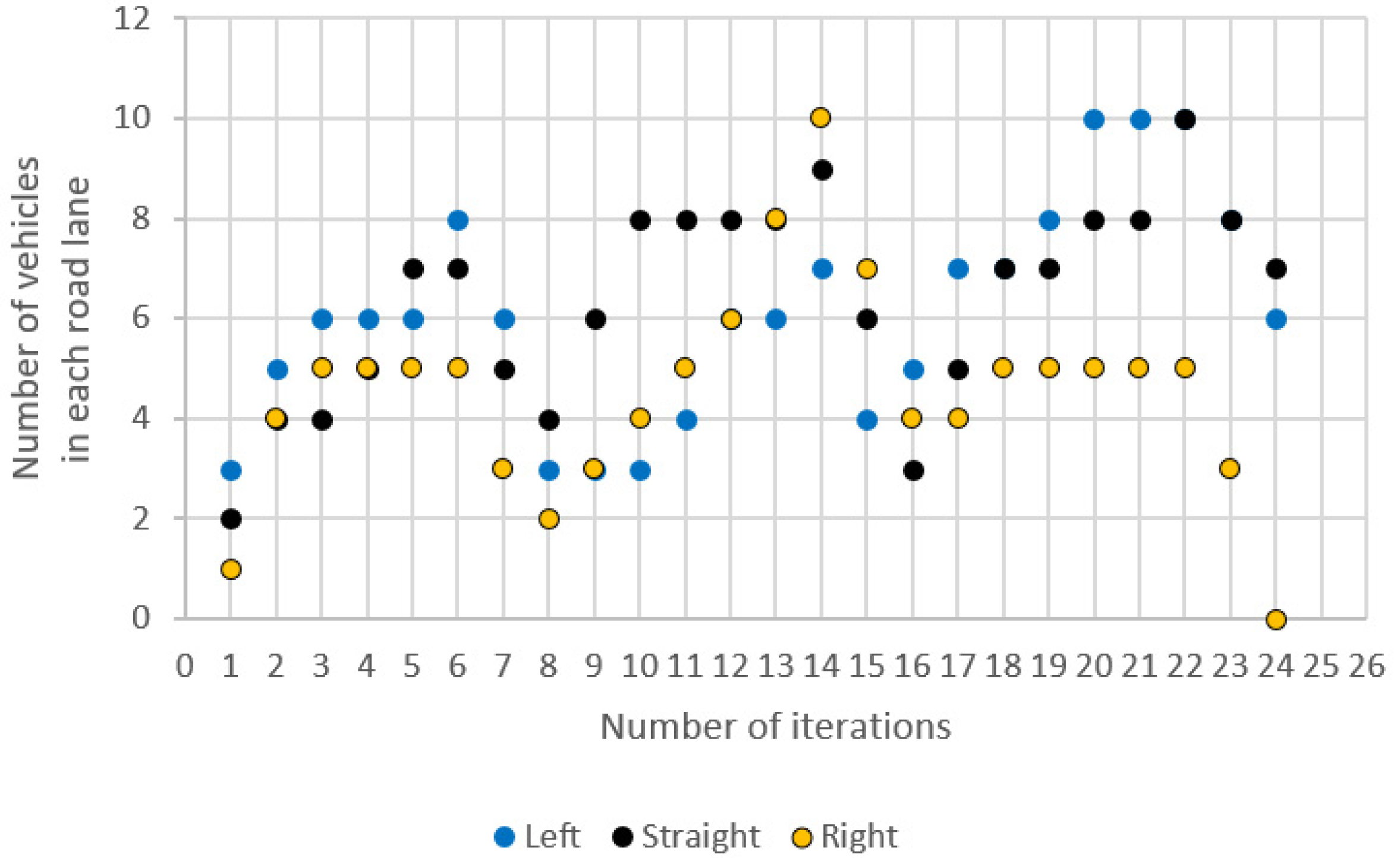
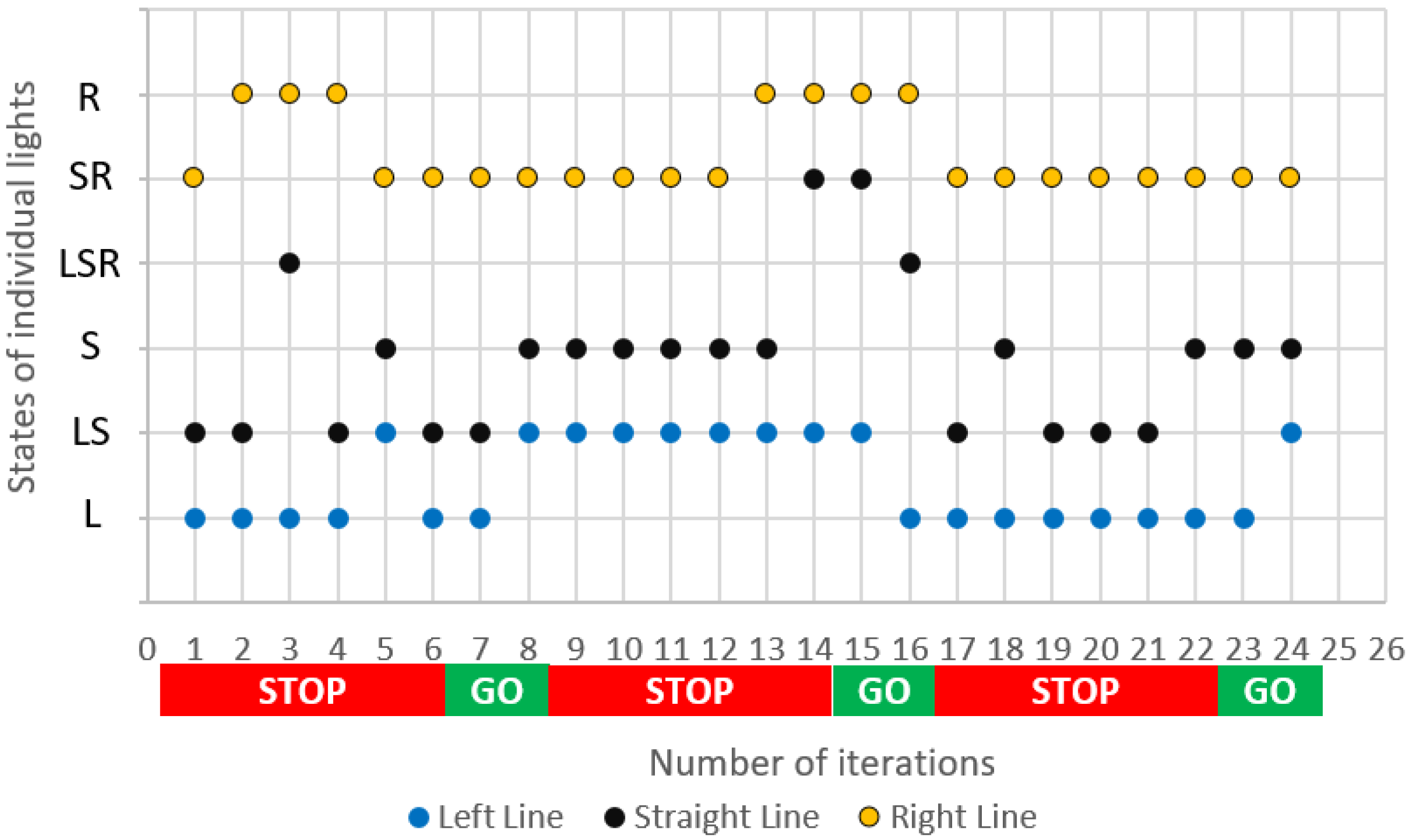
| Phase | Iteration | Numbers of Vehicles | State of Lights * | ||||
|---|---|---|---|---|---|---|---|
| Left | Straight | Right | Left Line | Straight Line | Right Line | ||
| Stop | 1 | 3 | 2 | 1 | L | LS | SR |
| 2 | 5 | 4 | 4 | L | LS | R | |
| 3 | 6 | 4 | 5 | L | LSR | R | |
| 4 | 6 | 5 | 5 | L | LS | R | |
| 5 | 6 | 7 | 5 | LS | S | SR | |
| 6 | 8 | 7 | 5 | L | LS | SR | |
| Go | 7 | 6 | 5 | 3 | L | LS | SR |
| 8 | 3 | 4 | 2 | LS | S | SR | |
| Stop | 9 | 3 | 6 | 3 | LS | S | SR |
| 10 | 3 | 8 | 4 | LS | S | SR | |
| 11 | 4 | 8 | 5 | LS | S | SR | |
| 12 | 6 | 8 | 6 | LS | S | SR | |
| 13 | 6 | 8 | 8 | LS | S | R | |
| 14 | 7 | 9 | 10 | LS | SR | R | |
| Go | 15 | 4 | 6 | 7 | LS | SR | R |
| 16 | 5 | 3 | 4 | L | LSR | R | |
| Stop | 17 | 7 | 5 | 4 | L | LS | SR |
| 18 | 7 | 7 | 5 | L | S | SR | |
| 19 | 8 | 7 | 5 | L | LS | SR | |
| 20 | 10 | 8 | 5 | L | LS | SR | |
| 21 | 10 | 8 | 5 | L | LS | SR | |
| 22 | 10 | 10 | 5 | L | S | SR | |
| Go | 23 | 8 | 8 | 3 | L | S | SR |
| 24 | 6 | 7 | 0 | LS | S | SR | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Paszkiewicz, A.; Pawłowicz, B.; Trybus, B.; Salach, M. Traffic Intersection Lane Control Using Radio Frequency Identification and 5G Communication. Energies 2021, 14, 8066. https://doi.org/10.3390/en14238066
Paszkiewicz A, Pawłowicz B, Trybus B, Salach M. Traffic Intersection Lane Control Using Radio Frequency Identification and 5G Communication. Energies. 2021; 14(23):8066. https://doi.org/10.3390/en14238066
Chicago/Turabian StylePaszkiewicz, Andrzej, Bartosz Pawłowicz, Bartosz Trybus, and Mateusz Salach. 2021. "Traffic Intersection Lane Control Using Radio Frequency Identification and 5G Communication" Energies 14, no. 23: 8066. https://doi.org/10.3390/en14238066
APA StylePaszkiewicz, A., Pawłowicz, B., Trybus, B., & Salach, M. (2021). Traffic Intersection Lane Control Using Radio Frequency Identification and 5G Communication. Energies, 14(23), 8066. https://doi.org/10.3390/en14238066