
Performance Analysis of Commercial Passive Balancing Battery Management System Operation Using a Hardware-in-the-Loop Testbed



Abstract
:1. Introduction
- Provides a detailed component-wise comparison of the existing battery models,
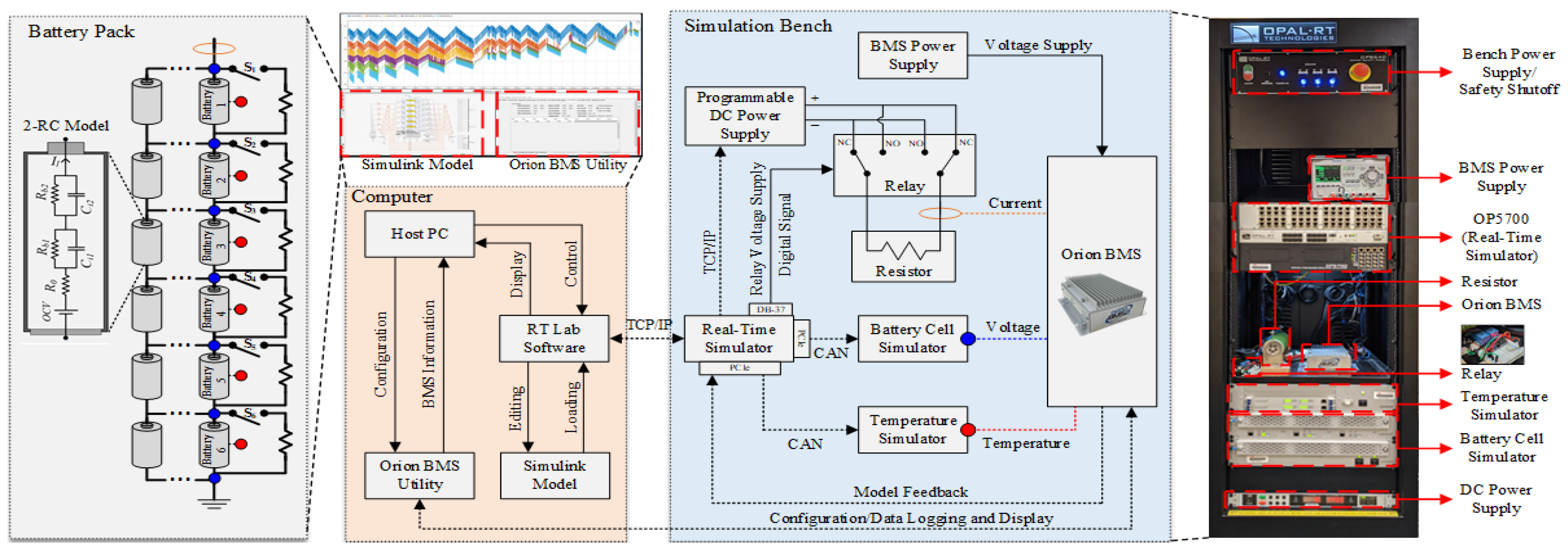
- Provides details on the configuration and operation of a Control-HIL (CHIL) testbed for a commercial BMS,
- Presents a comparison of simulation-based and commercial BMS results to assess the resulting error introduced by operating close-to-second life batteries in a US06 drive profile,
- Presents additional insights into the operation of the commercially available Orion BMS for system integrators and recommendations for enhancing the future SOC estimation for decreased battery degradation,
- Provides a comparison of existing literature works that utilize the same commercial passive balancing BMS while adding new supplemental information.
2. Related Work
3. BMS Testbed Configuration
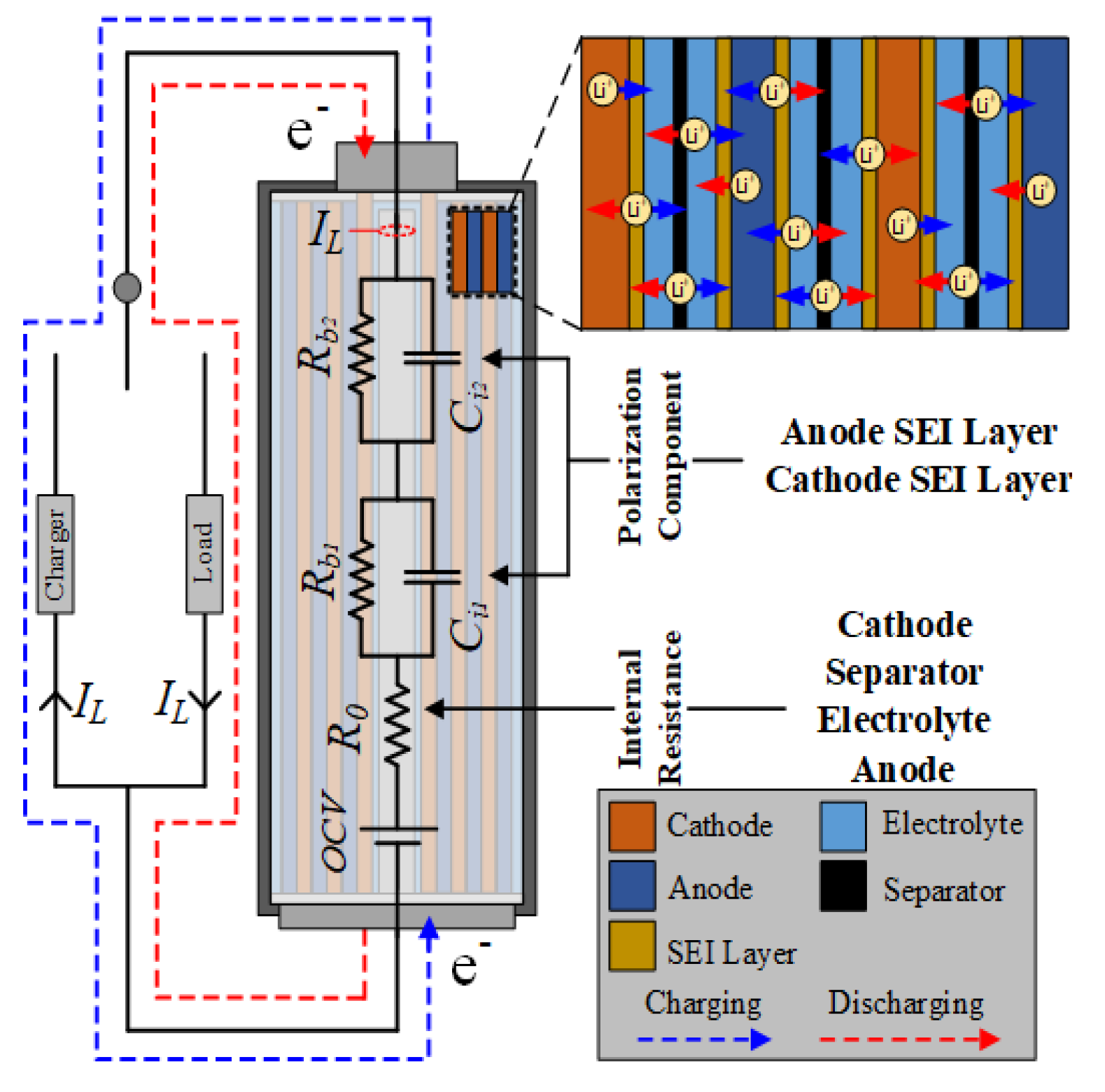
4. Battery Modeling Approach
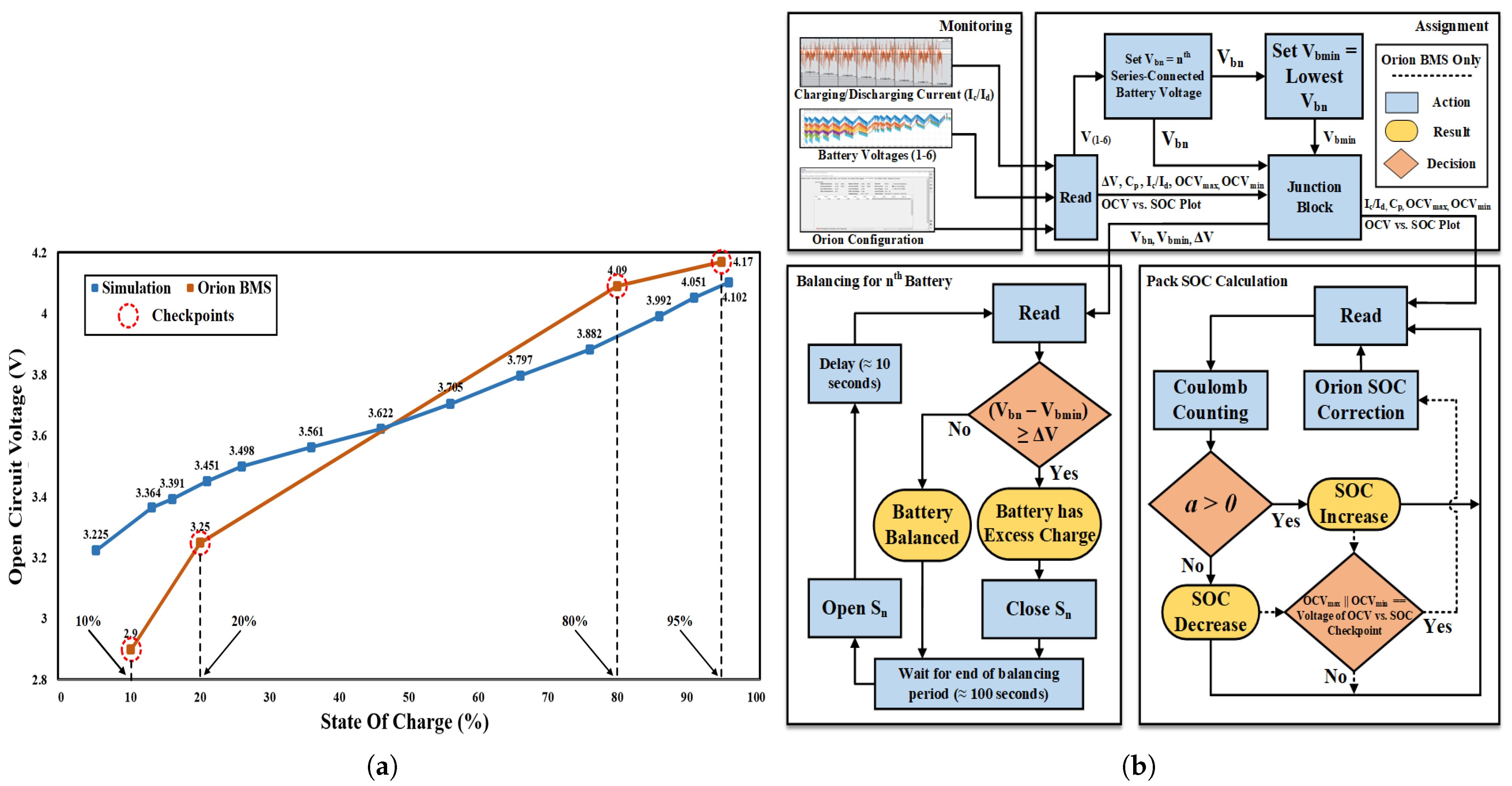
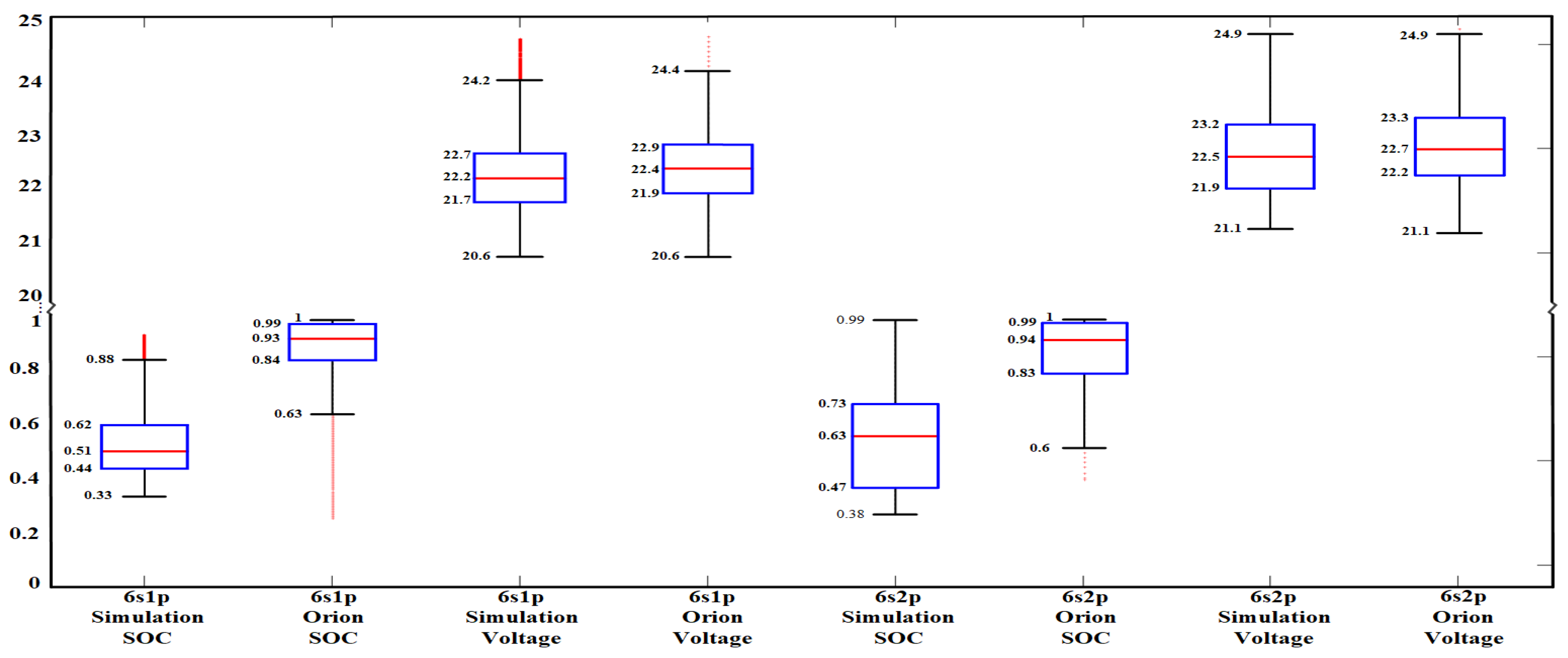
5. Simulation and Orion BMS Results Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Deng, D. Li-ion batteries: Basics, progress, and challenges. Energy Sci. Eng. 2015, 3, 385–418. [Google Scholar] [CrossRef]
- Wei, L.; Sarwat, A.I.; Saad, W.; Biswas, S. Stochastic games for power grid protection against coordinated cyber-physical attacks. IEEE Trans. Smart Grid 2016, 9, 684–694. [Google Scholar] [CrossRef]
- Olowu, T.O.; Sundararajan, A.; Moghaddami, M.; Sarwat, A.I. Future Challenges and Mitigation Methods for High Photovoltaic Penetration: A Survey. Energies 2018, 11, 1782. [Google Scholar] [CrossRef] [Green Version]
- Debnath, A.; Olowu, T.O.; Parvez, I.; Sarwat, A. A Binary Search Algorithm based Optimal Sizing of Photovoltaic and Energy Storage Systems. In Proceedings of the 2021 IEEE Green Technologies Conference (GreenTech), Denver, CO, USA, 7–9 April 2021; pp. 563–568. [Google Scholar]
- Islam, A.; Domijan, A.; Damnjanovic, A. Assessment of the reliability of a Dynamic Smart Grid System. Int. J. Power Energy Syst. 2011, 31, 198–202. [Google Scholar] [CrossRef]
- Li, S.; Fan, Z. Encapsulation methods of sulfur particles for lithium-sulfur batteries: A review. Energy Storage Mater. 2021, 34, 107–127. [Google Scholar] [CrossRef]
- Li, S.; Leng, D.; Li, W.; Qie, L.; Dong, Z.; Cheng, Z.; Fan, Z. Recent progress in developing Li2S cathodes for Li–S batteries. Energy Storage Mater. 2020, 27, 279–296. [Google Scholar] [CrossRef]
- Li, S.; Jiang, J.; Dong, Z.; Wu, J.; Cheng, Z.; Zhu, H.; Fan, Z.; Wang, Y.; Leng, D. Ferroconcrete-inspired construction of self-supporting Li2S cathode for high-performance lithium–sulfur batteries. Microporous Mesoporous Mater. 2020, 293, 109822. [Google Scholar] [CrossRef]
- Propp, K.; Marinescu, M.; Auger, D.J.; O’Neill, L.; Fotouhi, A.; Somasundaram, K.; Offer, G.J.; Minton, G.; Longo, S.; Wild, M.; et al. Multi-temperature state-dependent equivalent circuit discharge model for lithium-sulfur batteries. J. Power Sources 2016, 328, 289–299. [Google Scholar] [CrossRef] [Green Version]
- Dharmasena, S.; Sarwat, A.I. Fuzzy Decision Making Assisted Model Predictive Direct Power Controller for a Grid-Interlinking Converter of a Battery Energy Storage System. In Proceedings of the 2020 52nd North American Power Symposium (NAPS), Tempe, AZ, USA, 11–13 April 2021; pp. 1–6. [Google Scholar]
- Saleem, D. Design considerations of a cryptographic module for distributed energy resources. In Proceedings of the CyberPELS 2019 Presentations, Knoxville, TN, USA, 15 May 2019. [Google Scholar]
- Saez-de Ibarra, A.; Martinez-Laserna, E.; Stroe, D.I.; Swierczynski, M.; Rodriguez, P. Sizing study of second life Li-ion batteries for enhancing renewable energy grid integration. IEEE Trans. Ind. Appl. 2016, 52, 4999–5008. [Google Scholar] [CrossRef] [Green Version]
- Martinez-Laserna, E.; Gandiaga, I.; Sarasketa-Zabala, E.; Badeda, J.; Stroe, D.I.; Swierczynski, M.; Goikoetxea, A. Battery second life: Hype, hope or reality? A critical review of the state of the art. Renew. Sustain. Energy Rev. 2018, 93, 701–718. [Google Scholar] [CrossRef]
- Hossain, E.; Murtaugh, D.; Mody, J.; Faruque, H.M.R.; Sunny, M.S.H.; Mohammad, N. A comprehensive review on second-life batteries: Current state, manufacturing considerations, applications, impacts, barriers & potential solutions, business strategies, and policies. IEEE Access 2019, 7, 73215–73252. [Google Scholar]
- Zhao, Y.; Pohl, O.; Bhatt, A.I.; Collis, G.E.; Mahon, P.J.; Rüther, T.; Hollenkamp, A.F. A Review on Battery Market Trends, Second-Life Reuse, and Recycling. Sustain. Chem. 2021, 2, 167–205. [Google Scholar] [CrossRef]
- Daowd, M.; Omar, N.; Van Den Bossche, P.; Van Mierlo, J. Passive and active battery balancing comparison based on MATLAB simulation. In Proceedings of the 2011 IEEE Vehicle Power and Propulsion Conference, Chicago, IL, USA, 6–9 September 2011; pp. 1–7. [Google Scholar]
- Deja, P. Tests of BMS Battery Management System with active and passive system of balancing the battery capacity. In IOP Conference Series: Materials Science and Engineering; IOP Publishing: Szczyrk, Poland, 2019; Volume 679, p. 012009. [Google Scholar]
- Einhorn, M.; Permann, R.; Kral, C.; Conte, F.; Guertlschmid, W.; Blochberger, T.; Kumpusch, R.; Fleig, J. Current equalization of serially connected battery cells for a possible second life application. In Proceedings of the 2011 IEEE Vehicle Power and Propulsion Conference, Chicago, IL, USA, 6–9 September 2011; pp. 1–5. [Google Scholar]
- Taylor, Z.; Akhavan-Hejazi, H.; Mohsenian-Rad, H. Power hardware-in-loop simulation of grid-connected battery systems with reactive power control capability. In Proceedings of the 2017 North American Power Symposium (NAPS), Morgantown, WV, USA, 17–19 September 2017; pp. 1–6. [Google Scholar]
- Lacap, J.; Park, J.W.; Beslow, L. Development and Demonstration of Microgrid System Utilizing Second-Life Electric Vehicle Batteries. J. Energy Storage 2021, 41, 102837. [Google Scholar] [CrossRef]
- Rezal, M.; Zulaikha, A.; Sabri, M.; Yusof, R.; Ridzwan, S. Orion Battery Management System (BMS) For Lithium-Ion Battery Pack. In Proceedings of the Colloquium of Education, Engineering & Technology (COLEET 2014) at Universiti Kuala Lumpur Malaysian Spanish Institute, Kulim, Kedah, Malaysia, 10 October 2014; pp. 80–86. [Google Scholar]
- Braco, E.; San Martín, I.; Berrueta, A.; Sanchis, P.; Ursúa, A. Experimental assessment of cycling ageing of lithium-ion second-life batteries from electric vehicles. J. Energy Storage 2020, 32, 101695. [Google Scholar] [CrossRef]
- Yusof, Y.; Adnan, M.F.M.; Guenther, R.; Zaman, M.H.M.; Ibrahim, A.A.; Ayob, A. Li-ion battery pack charging process and monitoring in electric vehicle. Appl. Mech. Mater. 2014, 663, 504–509. [Google Scholar] [CrossRef]
- Kollmer, J.D.; Biswas, S.K.; Bai, L.; Sarwat, A.I.; Saad, W. A hardware-in-the-loop experimental platform for power grid security. In Proceedings of the 2018 ASEE Annual Conference & Exposition, Salt Lake City, UT, USA, 24–27 June 2018; pp. 1–17. [Google Scholar]
- Hamidi, A.; Weber, L.; Nasiri, A. EV charging station integrating renewable energy and second-life battery. In Proceedings of the 2013 International Conference on Renewable Energy Research and Applications (ICRERA), Madrid, Spain, 20–23 October 2013; pp. 1217–1221. [Google Scholar]
- He, H.; Xiong, R.; Fan, J. Evaluation of Lithium-Ion Battery Equivalent Circuit Models for State of Charge Estimation by an Experimental Approach. Energies 2011, 4, 582–598. [Google Scholar] [CrossRef]
- Mousavi, G.S.; Nikdel, M. Various battery models for various simulation studies and applications. Renew. Sustain. Energy Rev. 2014, 32, 477–485. [Google Scholar] [CrossRef]
- Pang, S.; Farrell, J.; Du, J.; Barth, M. Battery state-of-charge estimation. In Proceedings of the 2001 American Control Conference, (Cat. No.01CH37148), Arlington, VA, USA, 25–27 June 2001; Volume 2, pp. 1644–1649. [Google Scholar]
- John, S. Modeling a Lithium-Ion Cell Using PLECS. Plexim GmbH, 2009. Available online: https://www.plexim.com/files/plecs_li-\thium_ion.pdf (accessed on 24 October 2021).
- Brando, G.; Dannier, A.; Spina, I.; Piegari, L. Comparison of accuracy of different LiFePO4 battery circuital models. In Proceedings of the 2014 International Symposium on Power Electronics, Electrical Drives, Automation and Motion, Ischia, Italy, 18–20 June 2014; pp. 1092–1097. [Google Scholar]
- Hussein, A.A.; Batarseh, I. An overview of generic battery models. In Proceedings of the 2011 IEEE Power and Energy Society General Meeting, Detroit, MI, USA, 24–28 July 2011; pp. 1–6. [Google Scholar]
- Hussein, A.A.; Batarseh, I. Experimental modeling and analysis of lithium-ion battery temperature dependence. In Proceedings of the 2015 IEEE Applied Power Electronics Conference and Exposition (APEC), Charlotte, NC, USA, 15–19 March 2015; pp. 1084–1088. [Google Scholar]
- Johnson, V.H.; Pesaran, A.A.; Sack, T. Temperature-Dependent Battery Models for High-Power Lithium-Ion Batteries. In Proceedings of the 17th Annual Electric Vehicle Symposium Presentations, Montreal, QC, Canada, 15–18 October 2000. [Google Scholar]
- Omar, N.; Widanage, D.; Abdel Monem, M.; Firouz, Y.; Hegazy, O.; Van den Bossche, P.; Coosemans, T.; Van Mierlo, J. Optimization of an advanced battery model parameter minimization tool and development of a novel electrical model for lithium-ion batteries. Int. Trans. Electr. Energy Syst. 2014, 24, 1747–1767. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, W.L.G. A review of li-ion battery equivalent circuit models. Trans. Electr. Electron. Mater. 2016, 17, 311–316. [Google Scholar] [CrossRef] [Green Version]
- Lu, L.; Han, X.; Li, J.; Hua, J.; Ouyang, M. A review on the key issues for lithium-ion battery management in electric vehicles. J. Power Sources 2013, 226, 272–288. [Google Scholar] [CrossRef]
- Barré, A.; Deguilhem, B.; Grolleau, S.; Gérard, M.; Suard, F.; Riu, D. A review on lithium-ion battery ageing mechanisms and estimations for automotive applications. J. Power Sources 2013, 241, 680–689. [Google Scholar] [CrossRef] [Green Version]
- Ramadesigan, V.; Northrop, P.W.; De, S.; Santhanagopalan, S.; Braatz, R.D.; Subramanian, V.R. Modeling and simulation of lithium-ion batteries from a systems engineering perspective. J. Electrochem. Soc. 2012, 159, R31. [Google Scholar] [CrossRef]
- Wehbe, J.; Karami, N. Battery equivalent circuits and brief summary of components value determination of lithium ion: A review. In Proceedings of the 2015 Third International Conference on Technological Advances in Electrical, Electronics and Computer Engineering (TAEECE), Beirut, Lebanon, 29 April–1 May 2015; pp. 45–49. [Google Scholar]
- Amrouche, S.O.; Rekioua, D.; Rekioua, T.; Bacha, S. Overview of energy storage in renewable energy systems. Int. J. Hydrogen Energy 2016, 41, 20914–20927. [Google Scholar] [CrossRef]
- Chen, M.; Rincon-Mora, G.A. Accurate electrical battery model capable of predicting runtime and I-V performance. IEEE Trans. Energy Convers. 2006, 21, 504–511. [Google Scholar] [CrossRef]
- Benveniste, G.; Rallo, H.; Casals, L.C.; Merino, A.; Amante, B. Comparison of the state of Lithium-Sulphur and lithium-ion batteries applied to electromobility. J. Environ. Manag. 2018, 226, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Attanayaka, A.; Karunadasa, J.; Hemapala, K. Estimation of state of charge for lithium-ion batteries—A Review. AIMS Energy 2019, 7, 186–210. [Google Scholar] [CrossRef]
- Subburaj, A.S.; Bayne, S.B. Analysis of dual polarization battery model for grid applications. In Proceedings of the 2014 IEEE 36th International Telecommunications Energy Conference (INTELEC), Vancouver, BC, Canada, 28 September–2 October 2014; pp. 1–7. [Google Scholar]
- Zhao, X.; Cai, Y.; Yang, L.; Deng, Z.; Qiang, J. State of charge estimation based on a new dual-polarization-resistance model for electric vehicles. Energy 2017, 135, 40–52. [Google Scholar] [CrossRef]
- Salameh, Z.M.; Casacca, M.A.; Lynch, W.A. A mathematical model for lead-acid batteries. IEEE Trans. Energy Convers. 1992, 7, 93–98. [Google Scholar] [CrossRef]
- Chiang, Y.H.; Sean, W.Y.; Ke, J.C. Online estimation of internal resistance and open-circuit voltage of lithium-ion batteries in electric vehicles. J. Power Sources 2011, 196, 3921–3932. [Google Scholar] [CrossRef]
- Jaguemont, J.; Boulon, L.; Dubé, Y. A comprehensive review of lithium-ion batteries used in hybrid and electric vehicles at cold temperatures. Appl. Energy 2016, 164, 99–114. [Google Scholar] [CrossRef]
- Plett, G.L. Extended Kalman filtering for battery management systems of LiPB-based HEV battery packs: Part 2. Modeling and identification. J. Power Sources 2004, 134, 262–276. [Google Scholar] [CrossRef]
- Hu, X.; Li, S.; Peng, H. A comparative study of equivalent circuit models for Li-ion batteries. J. Power Sources 2012, 198, 359–367. [Google Scholar] [CrossRef]
- Zhang, C.; Li, K.; Mcloone, S.; Yang, Z. Battery modelling methods for electric vehicles—A review. In Proceedings of the 2014 European Control Conference (ECC), Strasbourg, France, 24–27 June 2014; pp. 2673–2678. [Google Scholar]
- Li, J.; Mazzola, M.S. Accurate battery pack modeling for automotive applications. J. Power Sources 2013, 237, 215–228. [Google Scholar] [CrossRef]
- Li, J.; Mazzola, M.S.; Gafford, J.; Jia, B.; Xin, M. Bandwidth based electrical-analogue battery modeling for battery modules. J. Power Sources 2012, 218, 331–340. [Google Scholar] [CrossRef]
- Kroeze, R.C.; Krein, P.T. Electrical battery model for use in dynamic electric vehicle simulations. In Proceedings of the 2008 IEEE Power Electronics Specialists Conference, Rhodes, Greece, 15–19 June 2008; pp. 1336–1342. [Google Scholar] [CrossRef]
- Tran, D.D.; Vafaeipour, M.; El Baghdadi, M.; Barrero, R.; Van Mierlo, J.; Hegazy, O. Thorough state-of-the-art analysis of electric and hybrid vehicle powertrains: Topologies and integrated energy management strategies. Renew. Sustain. Energy Rev. 2020, 119, 109596. [Google Scholar] [CrossRef]
- Kollmeyer, P. Panasonic 18650PF Li-Ion Battery Data. 2018. Available online: https://data.mendeley.com/datasets/wykht8y7tg/1 (accessed on 24 October 2021).
- Khalid, A.; Hernandez, A.; Sundararajan, A.; Sarwat, A.I. Simulation-based analysis of equalization algorithms on active balancing battery topologies for electric vehicles. In Advances in Intelligent Systems and Computing; Springer: Cham, Switzerland, 2019; Volume 1069, pp. 708–728. [Google Scholar]
- Madani, S.S.; Schaltz, E.; Knudsen Kær, S. Review of parameter determination for thermal modeling of lithium ion batteries. Batteries 2018, 4, 20. [Google Scholar] [CrossRef] [Green Version]
- Khalid, A.; Sarwat, A.I. Battery module performance analysis under varying interconnection topology for electric vehicles. In Proceedings of the 2019 IEEE Transportation Electrification Conference (ITEC-India), Bengaluru, India, 17–19 December 2019; pp. 1–5. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Models | Components | Input | Variable Functions | Battery Types Supported | Simulation Software Used | |||
|---|---|---|---|---|---|---|---|---|
| Internal Resistances | Diodes | Capacitances | DC Source | |||||
| Rint/Simple Battery Model [26,27,28,29,30] | - | - | Current | OCV and | - | Lithium | PLECS | |
| Linear Model [31,32] | , | 2 | - | Voltage, Current | , , OCV, SOC, | OCV(SOC) | Lithium | Advisor |
| NREL SAFT 2-Capacitance/SAFT RC Model [26,33,34,35] | , , | - | , | Current | , , , , , , | , , , , | Lithium | Matlab, Pspice, Advisor |
| Thevenin Models and their Derivatives | ||||||||
| Basic Thevenin Model [26,36,37,38,39,40,41,42,43] | , | - | Voltage, Current | , , , , OCV, SOC | Lithium, Lead Acid, Nickel-Metal Hydride | Matlab, Pspice | ||
| Dual Polarization/Second Order Model [26,39,44,45] | , , | - | , | Voltage, Current | , , , , , , OCV | Lithium | PSCAD, Matlab | |
| First Order Model/Modified Thevenin Model [27,46,47] | , | - | Voltage, Current | , , , , OCV, SOC | OCV(SOC), | Lithium, Lead Acid | Advisor | |
| Resistive Thevenin/Modified Simple Model/Modified Thevenin Model (Pang et al.) [27,28,31,39,48,49,50] | , | 2 | - | Voltage, Current | , , OCV, | Lead Acid, Lithium | Advisor | |
| Reactive Battery Model/Modified Thevenin Model (Pang et al.) [27,28,48] | , , | 2 | Voltage, Current | , , , OCV, | Lead Acid, Lithium | Advisor | ||
| Order Linear Parameter Varying/Electrical Analogue Model [39,51,52,53,54] | , , … | - | , … | Voltage, Current | , …, …, OCV, SOC, | OCV(SOC); (SOC), (SOC), … (SOC); (SOC), … (SOC); | Lithium, Lead Acid, Nickel-Metal Hydride | Matlab |
| Simulation Number | Topology | Sequence | Target V | CC | US06 Current Range |
|---|---|---|---|---|---|
| 1 | 6s1p | CC(7.5)-US(2)-CC(15)-US(3)-CC(22.5)-US(4)- CC(30)-US(5)-CC(37.5)-US(6)-CC(45)-US(7)- CC(52.5)-US(8)-CC(60) | 50 mV | C/2 | ±1.5 A |
| 2 | 6s2p | CC(7.5)-US(2)-CC(15)-US(3)-CC(22.5)-US(4)- CC(30)-US(5)-CC(37.5)-US(6)-CC(45)-US(7)- CC(52.5)-US(8)-CC(60)-US(1) [Repeat Twice] | 50 mV | C/4 | ±1.5 A |
| (a) 6s1p Topology | ||||
|---|---|---|---|---|
| Time (in seconds) | ||||
| 9207 | 18,410 | 27,620 | 36,830 | |
| Simulation V | 0.451 | 0.314 | 0.204 | 0.036 |
| Orion BMS V | 0.561 | 0.418 | 0.317 | 0.042 |
| (b) 6s2p interleaved topology | ||||
| Time (in seconds) | ||||
| 18,550 | 37,110 | 55,660 | 74,220 | |
| Simulation V | 0.514 | 0.387 | 0.207 | 0.048 |
| Orion BMS V | 0.584 | 0.502 | 0.317 | 0.049 |
| (c) Simulation versus Orion BMS for both topologies | ||||
| Time (in seconds) | ||||
| 9207 | 18,410 | 27,620 | 36,830 | |
| SOC | 29.05% | 44.26% | 32.44% | 6.16% |
| Time (in seconds) | ||||
| 18,550 | 37,110 | 55,660 | 74,220 | |
| SOC | 38.65% | 35.06% | 27.53% | 8.06% |
| Literature | Application | Topology | Cycling Approach | Orion BMS Functionality Discussed | Conclusion(s) |
|---|---|---|---|---|---|
| Dega et al. [17] | Functional Testing | 224s1p | Charge: CC of 0.3C Discharge: Varying load current values ranging from 0.5C to 1.1C |
|
|
| Taylor et al. [19] | Grid-Support | 12s1p | Charge: C/10 for 10.5 h Discharge: 1C max based on PQ support required. |
|
|
| Lacap et al. [20] | Grid-Support | 108s16p | Charge: CC-CV load leveling with approximately 0.2C CC. Discharge: CC peak shaving at less than 0.2C. |
|
|
| Rezal et al. [21] | Functional Analysis | 26s2p | Charge: None Discharge: None |
|
|
| Yusof et al. [23] | EV | 26s2p | Charge: CC-CV at approx- imately 0.3 CC. Discharge: 18.27 km of EV driving at varying C rates. |
|
|
| This paper | EV | 6s1p, 6s2p | Charge: Increasing duration intervals of CC at C/2 and C/4 for 1s1p and 2s2p respectively. (1.375 A each) Discharge: Increasing dura- tion intervals of the US06 drive profiles. |
|
|
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khalid, A.; Stevenson, A.; Sarwat, A.I. Performance Analysis of Commercial Passive Balancing Battery Management System Operation Using a Hardware-in-the-Loop Testbed. Energies 2021, 14, 8037. https://doi.org/10.3390/en14238037
Khalid A, Stevenson A, Sarwat AI. Performance Analysis of Commercial Passive Balancing Battery Management System Operation Using a Hardware-in-the-Loop Testbed. Energies. 2021; 14(23):8037. https://doi.org/10.3390/en14238037
Chicago/Turabian StyleKhalid, Asadullah, Alexander Stevenson, and Arif I. Sarwat. 2021. "Performance Analysis of Commercial Passive Balancing Battery Management System Operation Using a Hardware-in-the-Loop Testbed" Energies 14, no. 23: 8037. https://doi.org/10.3390/en14238037
APA StyleKhalid, A., Stevenson, A., & Sarwat, A. I. (2021). Performance Analysis of Commercial Passive Balancing Battery Management System Operation Using a Hardware-in-the-Loop Testbed. Energies, 14(23), 8037. https://doi.org/10.3390/en14238037