3.1. Connection of Car Dynamics with Car Body Aerodynamics
The first documented works on the positive effects of additional aerodynamic elements on vehicle behavior at high speeds appeared in the late 1990s.
Donicelli et al., presented one of the earliest works on a mathematical model linking the motion of the car body at high speeds to changes in aerodynamic forces and their mutual coupling [
17]. The authors built a complex vehicle dynamics model, taking into account the relationships of body motion with the change in aerodynamic forces caused by that motion. A fluid structure interaction (FSI) problem appeared. In the model used by the authors, in addition to body and wheel movements, the following were considered: engine displacement, steering susceptibility, and the vertical displacement of the driver’s body (
Figure 13).
Since the model was dedicated to the analysis of sports car motion, its aerodynamic properties were extremely important. Due to the increase of aerodynamic forces with the square of the driving speed, the significant influence of aerodynamics was noticed only at driving speeds exceeding 40–50 m/s. The vehicle vibration excitation factor was the road irregularities transmitted to the tires at the point of contact with the road. In this study, a random distribution of the road profile was assumed.
The developed model made it possible to perform numerical simulations of the vehicle driving over the irregularities. Taking into account the presence of aerodynamic forces in the model and their changes caused by body pitch and body vibrations in the vertical direction, their influence on driving comfort and road holding during fast driving was examined. The body was treated as the equivalent of an airfoil whose angle of attack varied with the angle of body tilt. This angle depends on the body pitch angle, the rate of change of this angle, and the vertical speed of the body. This model describes quite well the aerodynamic characteristics of the car body based on the static relationship between the aerodynamic lift and drag and the angle of attack.
The approach proposed by the authors appears to be a significant advance in relating body dynamics to external aerodynamic forces. It considers both the pitch oscillations of the body as well as its vertical oscillations. Numerical calculations were supplemented by track tests. The system of equations presented by the authors shows that the aerodynamic forces were de facto generated by two sources and distributed to act on the front and rear axles.
The authors attempted to optimize the body shape (front and rear wings) based on its expected characteristics, which would be beneficial for damping the body and wheel vibration. This means modeling a fixed front and rear wing system. Therefore, optimization of the aerodynamic system involved the selection of inclining angles of the front and rear wings.
The presented results indicate the possibilities of aerodynamic passive damping of the body vibrations caused by driving on rough ground. Such possibilities appear only at high driving speeds, exceeding 40 m/s.
The work of Donicelli et al., is an example of an aerodynamic passive method for damping car body vibrations [
17]. The analysis in this paper takes into account changes in the aerodynamic forces generated on the body during movements caused by road irregularities transmitted by an elastic suspension and coupled with them.
3.2. Control-Oriented Mechanical-Aerodynamic System
3.2.1. Models Controlling Vehicle Handling
In 2012, Diba et al., presented a comprehensive nonlinear vehicle model developed to study the feasibility of the proposed active aerodynamic system [
18]. The vehicle model had 8° of freedom, namely, longitudinal velocity, lateral velocity, yaw rate, roll angle, and the wheel rotational speed (four wheels). The vehicle model was enhanced with the Pacejka Magic Formula [
19] a nonlinear combined slip-tire model. The set of four individual inverted wings was added for generation of external aerodynamic forces.
In 2014, Diba et al., presented a nonlinear vehicle model using an active aerodynamic (AAD) control system of four inverted wings to generate aerodynamic forces to assist the vehicle’s mechanical motion control system [
20]. The structure of the controller and the rules of control supporting lane changing and wet driving maneuvers were presented. Computer simulation results were presented and a comparison with the experimental results was made. The performance of the control system was evaluated.
An important novelty in the presented vehicle dynamics model is the inclusion of the behavior of tires loaded with a lateral force. This makes it possible to simulate the maneuvers of changing the line of motion. The authors used a semi-empirical model developed by Pacejka [
19] known as the Tyre Magic Formula, whose application is important when moving with boundary tire side loads. The use of this model enabled the simulation of maneuvers at low tire adhesion coefficients on wet surfaces.
The control system developed by the authors accepts the driver’s actions as an input, reacts to the effects of vehicle roll, determines the drift angles, and uses a nonlinear model of the four tires to calculate the vehicle dynamics (longitudinal, transverse, yaw, and roll). The calculation of the dynamic wander of the axle loads and the calculation of the tire glide angles are the source data for the control system to control the moving aerodynamic elements.
Tables containing values of aerodynamic forces as a function of the angle of attack and airfoil speed are used in the control model. The data are in the form of a look-up table of aerodynamic properties for each wing. Data for these tables were obtained from CFD numerical calculations performed separately for each wing. This means that the interactions between the airfoils and the body were not taken into account.
The simulation results show that, during the line change maneuver, the use of the airfoil position control system results in smaller transverse speed changes. The necessary steering movements are also smaller, and smaller tire drift angles occur. This very sophisticated model was verified by comparisons with test drive results.
The simulation results presented here demonstrate that active inverted wings can provide noteworthy dynamic capabilities and enhance the safety features of race cars.
A detailed analytical study and formulations of the race car nonlinear model with the airfoils were presented (
Figure 14). Computer simulations were carried out to evaluate the performance of the proposed active aerodynamic system.
Two case studies were conducted to evaluate the performance of the AAD system using a computer simulation. To perform the simulation, the race car and the AAD system were modeled in the MATLAB/Simulink© software using the vehicle dynamic equations, the controller laws, and the look-up tables. As mentioned above, a small size race car was considered as a case study.
Chen et al. [
21] were the first to attempt the accurate modeling of the aerodynamic characteristics of a vehicle with moving aerodynamic elements, but without great success. They performed CFD numerical calculations of the flow structure around the vehicle with moving aerodynamic elements, one of which was in the neutral position while the other changed its angular position. In this way, the combined aerodynamic characteristics of the two were obtained. Using static data from the numerical calculations of the aerodynamic characteristics of a vehicle with one active element and superposing this data upon itself does not reflect the actual characteristics of a vehicle with two interacting active elements. In addition, the aerodynamic data are not complete. There is no information about the dimensions of the vehicle, the wings, or the aerodynamic moments of force. A simplified car geometry and scheme of the dynamic model is presented in
Figure 15. Nevertheless, this is a significant advance in the construction of coupled mechanical-flow models.
The vehicle dynamics model itself is a simple bicycle model (
Figure 15), but the simplified model of tire work at lateral loads (Pacejka Magic Formula [
19]) was used, which enabled the simulation of maneuvers such as a double lane change test on a dry road with a friction coefficient of 0.85 and on a wet road with a friction coefficient of 0.4.
The results of the simulations showed that an integrated control strategy (ICS), through the integration of active aerodynamic control (AAC) and differential braking control (DBC), can have a positive effect on improving tire workload usage.
3.2.2. Models for Controlling Moving Aerodynamic Elements for Increased Ride Comfort or Traction
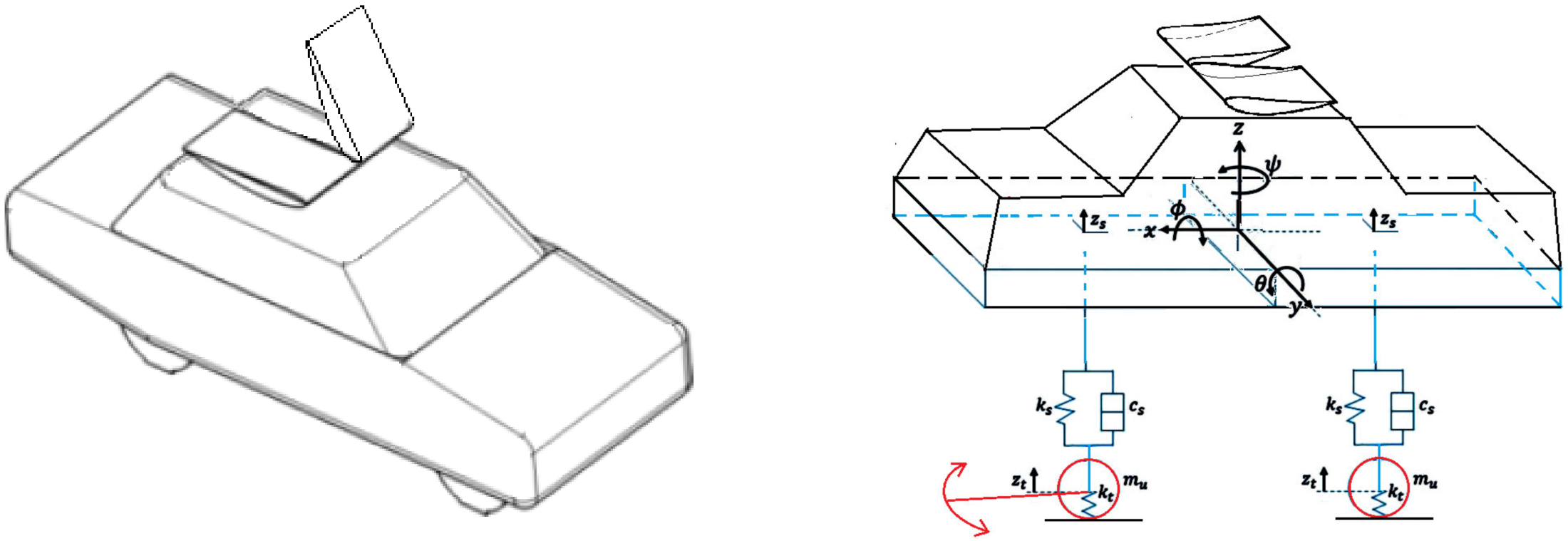
Corno et al., presented simple models of a car (quarter car model) with a wing placed on the body [
22,
23]. They analyzed the behavior of a car model simplified to a quarter car model mass represented by the quarter mass of a body equipped with a movable wing producing an aerodynamic force in the vertical direction, supported by a spring and damper representing the elastic components of the vehicle suspension, and a wheel mass and a final spring representing the elastic properties of a tire [
22].
They analyzed the behavior of a dynamic system containing a system of masses, springs, and dampers excited to vibration by road irregularities and damped by a moving aerodynamic element, the wing (
Figure 16). They assumed simplified aerodynamic characteristics of a wing with a symmetric NACA 0014 profile as a function of the angle of attack. The range of variation of the wing angle of attack was limited to 15°, corresponding to the operation of the wing without flow separation.
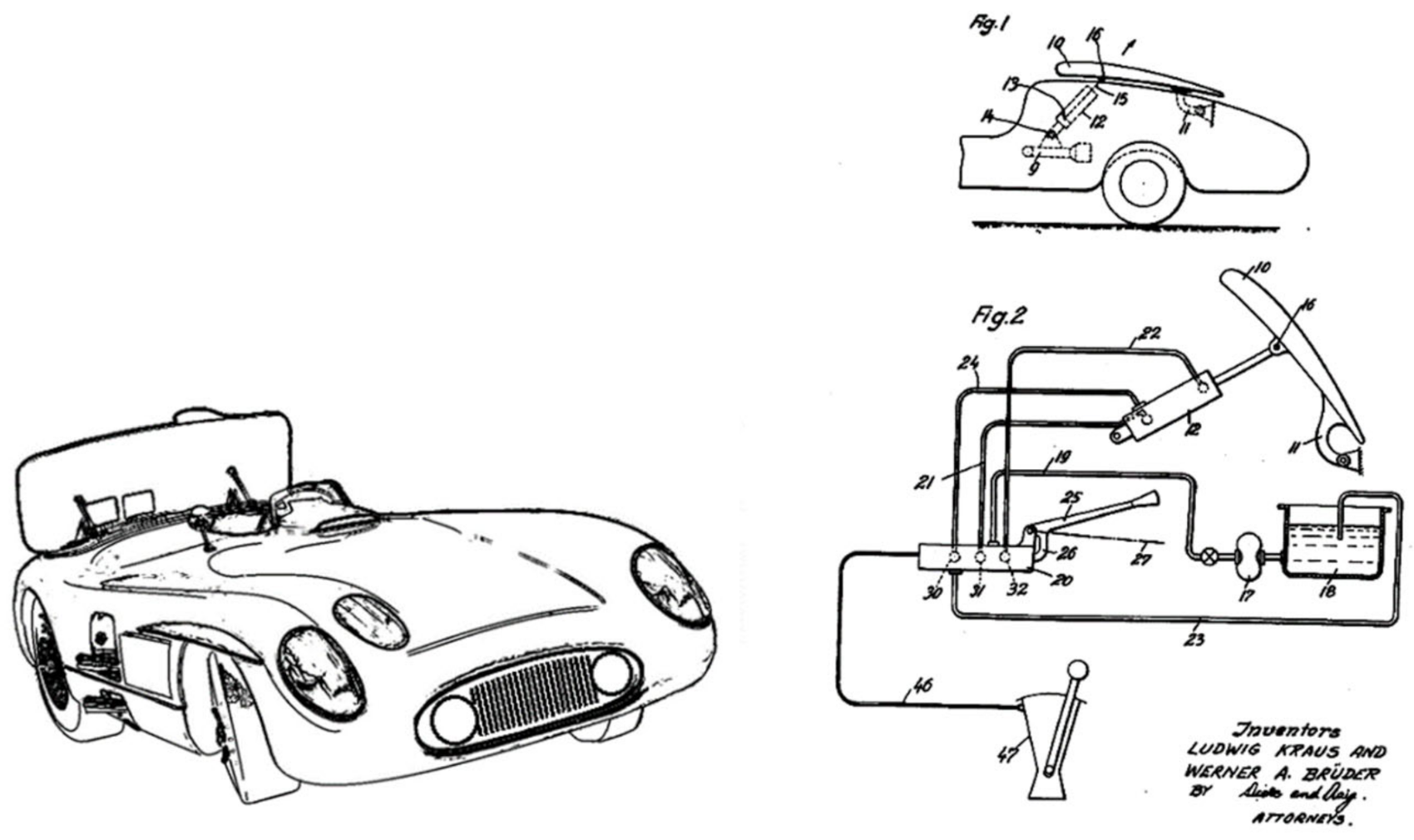
The idea of transferring aerodynamic forces from the wing to unsprung suspension parts is a solution first used by Jim Hall in the Chaparral 2F car (
Figure 10). The “sky-hook” and “ground-hook” control strategies are two practical reference systems. In the case of the analysis of the dynamic systems of a car moving on uneven ground, the sky-hook strategy tracks the movement of the body relative to a fixed reference system, whereas the ground-hook strategy tracks the movement of the wheel relative to the momentary positions of the uneven changing position of the ground over time. The former is used to control body vibration and minimize it, i.e., for driver and passenger comfort, and the latter is used to control wheel tire deflection and minimize it.
The wing angle of attack setting controller linearizes the aerodynamic characteristics of the wing. The servo had a frequency response of up to 10 Hz.
A sine-sweep excitation with a wide frequency band was adopted as the excitation of the system by the road irregularities. As a second excitation model, a white noise filtered road roughness waveform was adopted using International Roughness Index (IRI) values in the Paterson standard [
24]. The IRI mathematically summarizes the longitudinal surface profile of the road in a wheel track, representing the vibrations induced in a typical passenger car by road roughness.
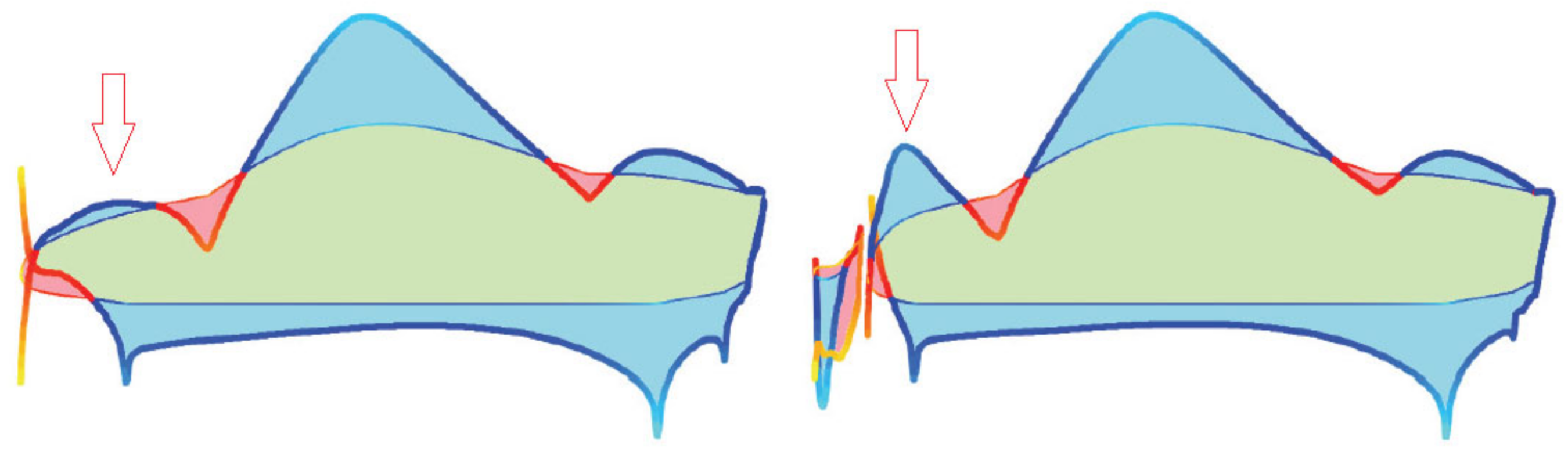
When considering the influence of active aerodynamic elements on body dynamics, the authors presented the results of analysis on comfort and road holding diagrams (
Figure 17), representing the relationship between two main performance criteria: the comfort oriented index and the road holding oriented index. Lower values of either of these indices indicate a better solution.
The comfort index describes the normalized ratio of vertical body accelerations to accelerations resulting from the road profile. It focuses on accelerations in the 3–10 Hz band. Road grip, on the other hand, is evaluated by taking tire deflection into account.
Analysis of the performance of mechanical damping systems alone shows that road holding cannot be increased without affecting ride comfort by changing only the mechanical parameters of the suspension.
The authors tried to show on these diagrams that an increase in ride comfort can be achieved by using active aerodynamic elements without a reduction of the road holding parameter. They showed that the two parameters are interrelated, and that it is not possible to increase road holding by changing shock absorber damping without compromising the comfort index. This study proved that the use of actively controlled aerodynamic surfaces, with lift force being an external force that acts directly on the chassis, can alleviate this trade-off. The authors also defined limits of the actuator frequency bandwidth taking into account the actuator power.
The influence of the wing area is important. Even the introduction of a small wing area of 0.05 m2, i.e., a wingspan of 1 m and a chord of 5 cm, results in a significant drop in the comfort index (a reduction of the sensation of body vibrations). The optimal size is 0.15 m2. The results of the analysis in the time domain show that, for wings with a bigger surface, the angular changes of the wing are smaller and occur more slowly. The effectiveness of the system increases linearly with the speed of travel. The main reservation for this analysis is the fact that it is impossible to use movable wings in the front part of the vehicle.
The use of active aerodynamic elements on the car body can be beneficial in reducing the level of vertical vibration of the body when using one element per wheel controlled independently. The areas of the individual wings are of the order of 0.15 m2 (1 m × 0.15 m). The operating frequencies of the servos range from 5 to 20 Hz. The upper frequency is limited by the required servo power.
The main conclusion is that improving ride comfort using aerodynamics is possible and is not related to the reduction of the road holding of the tires.
An interesting and novel approach to the subject can be found in the paper by Wu and Chen [
25]. The authors used separate wings to transfer the aerodynamic forces to the body and to the wheels separately, but simultaneously (
Figure 18).
Previously, the transmission of aerodynamic forces through movable aerodynamic elements was considered, either to the vehicle body or directly to the vehicle wheels. The authors proposed using both solutions simultaneously. Each airfoil could be controlled so that body vibrations could be damped in parallel while maintaining good contact between the tires and the rough roadway. The authors gave this concept the name dual active aerodynamic surface (DAAS) control.
The dynamic model is very simple because it is limited to a quarter model of the vehicle. For comparison purposes, the authors simulated the operation under identical conditions of passive suspension (PS) and active suspension (AS) and compared the results.
To obtain sufficient values of changes in aerodynamic forces, it is necessary to use moving aerodynamic elements with a large surface area or to limit the operation of this system for high driving speeds. The authors made an assumption, which was not very realistic, that the surfaces of the airfoils would be as large as 0.6 m2 (dimensions 0.6 m × 1 m).
Simulations showed that DAAS can significantly improve ride comfort and road holding compared with PS, but only slightly when compared with AS, and can respond faster than AS and PS. The biggest drawback of this solution is the need for moving aerodynamic elements with very large areas (0.6 m2).
Unfortunately, the use of the simple (quarter car) mechanical model limited the usefulness of the conclusions.
In the work of Shahein et al. [
26], the authors used a half model of a car with a single airfoil to present an active system for damping the oscillatory longitudinal vibrations of the car (
Figure 19).
This paper describes the vehicle dynamics model used and the control system scheme, and presents the results obtained from the simulation of the car motion on a sinusoidal ground.
The results are presented in the form of time traces of vertical displacements of the body, vertical accelerations, angular accelerations, and tire deformation magnitudes.
The summary results are presented in a road holding index versus the comfort index graph. They indicate the possibility of a significant improvement of driving comfort using relatively small areas of moving aerodynamic elements. Unfortunately, this effect occurs only after the speed exceeds 200 km/h. Therefore, the authors used small aerodynamic surfaces this time, but only at high speeds.
Only one wing was used on the rear axle. This does not provide separation of damping of the vertical body vibrations nor of the pitch angle oscillations.
3.2.3. Models Controlling Vehicle Handling, Ride Comfort, and Road Holding (Half Car Models)
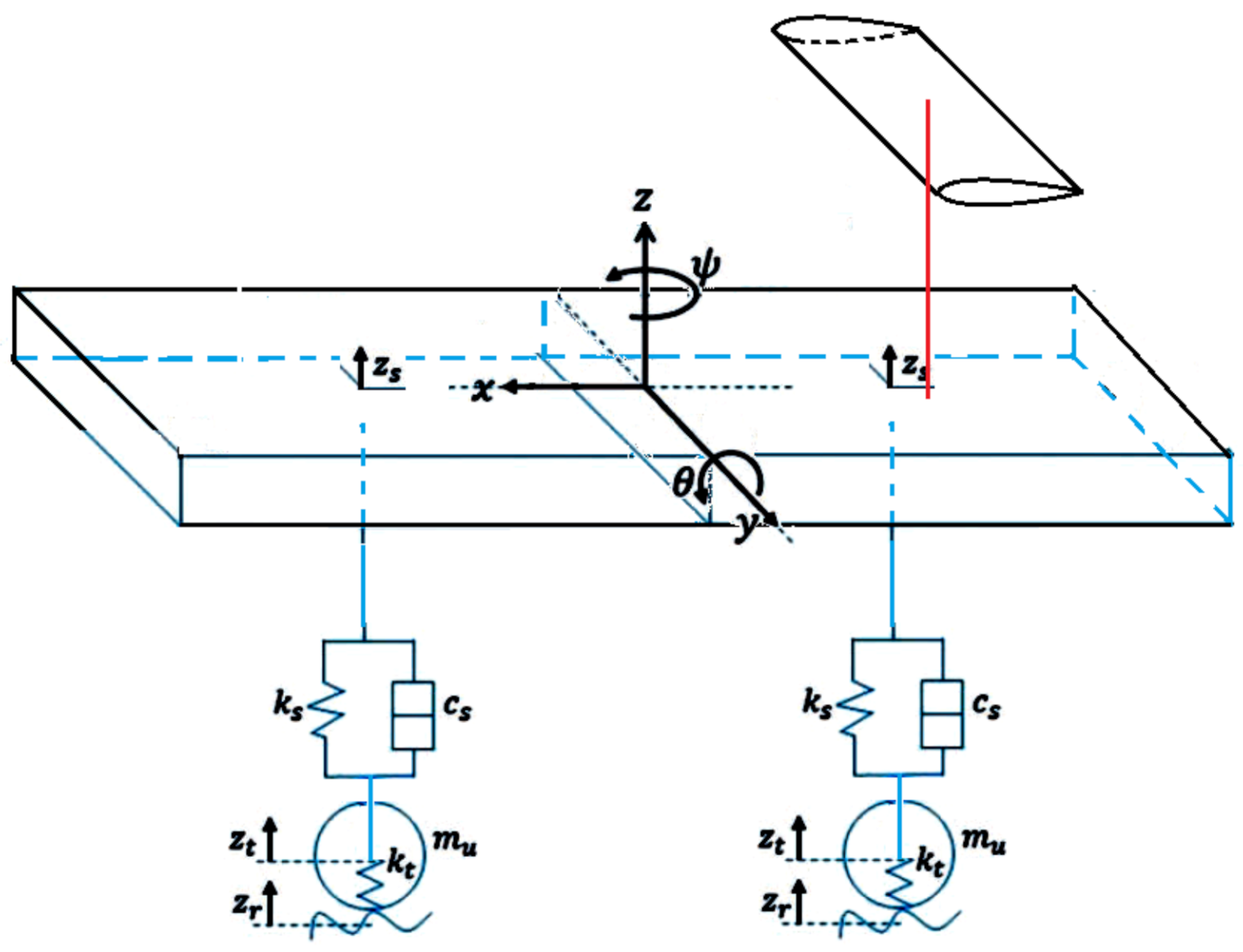
Savkoor and Chou [
27] presented the possibilities of damping car body vibrations by active systems using moving aerodynamic elements (wings or spoilers) to generate damping forces (
Figure 20 and
Figure 21). A 3DOF vehicle model (a bicycle model) for the control of lateral, yaw, and roll motion was used. On this background, an additional dynamic model of pitching and bouncing was applied.
A sensible system of movable aerodynamic elements located on the car body was shown (
Figure 20), their properties were analyzed, and the potential range of applications were presented. The problems that arose were discussed and methods of their solution through a control system were presented.
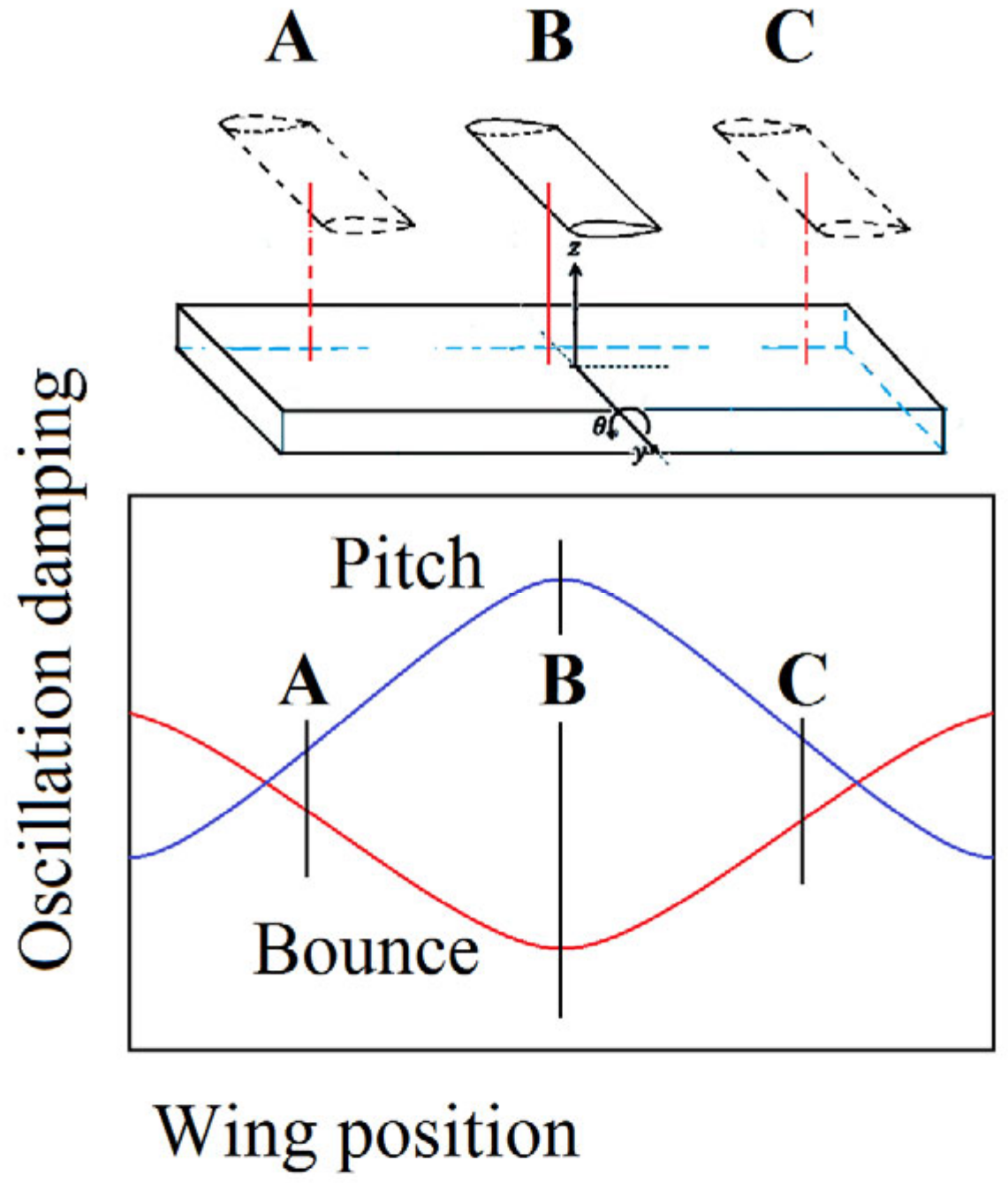
One problem considered was the position of the wing on the fuselage. When considering the influence of the position of the movable aerodynamic element on the improvement of driving comfort, it should be considered that vibrations in the vertical direction require a different position of the aerodynamic actuator than when the purpose of the action is the damping of body oscillations. A diagram showing damping effectiveness vs. aerodynamic actuator position along the longitudinal axis of the car is presented in
Figure 21. Despite the relatively simple vehicle dynamics model (bicycle in plain motion and half car model of pitching and bouncing), the authors obtained a set of interesting data.
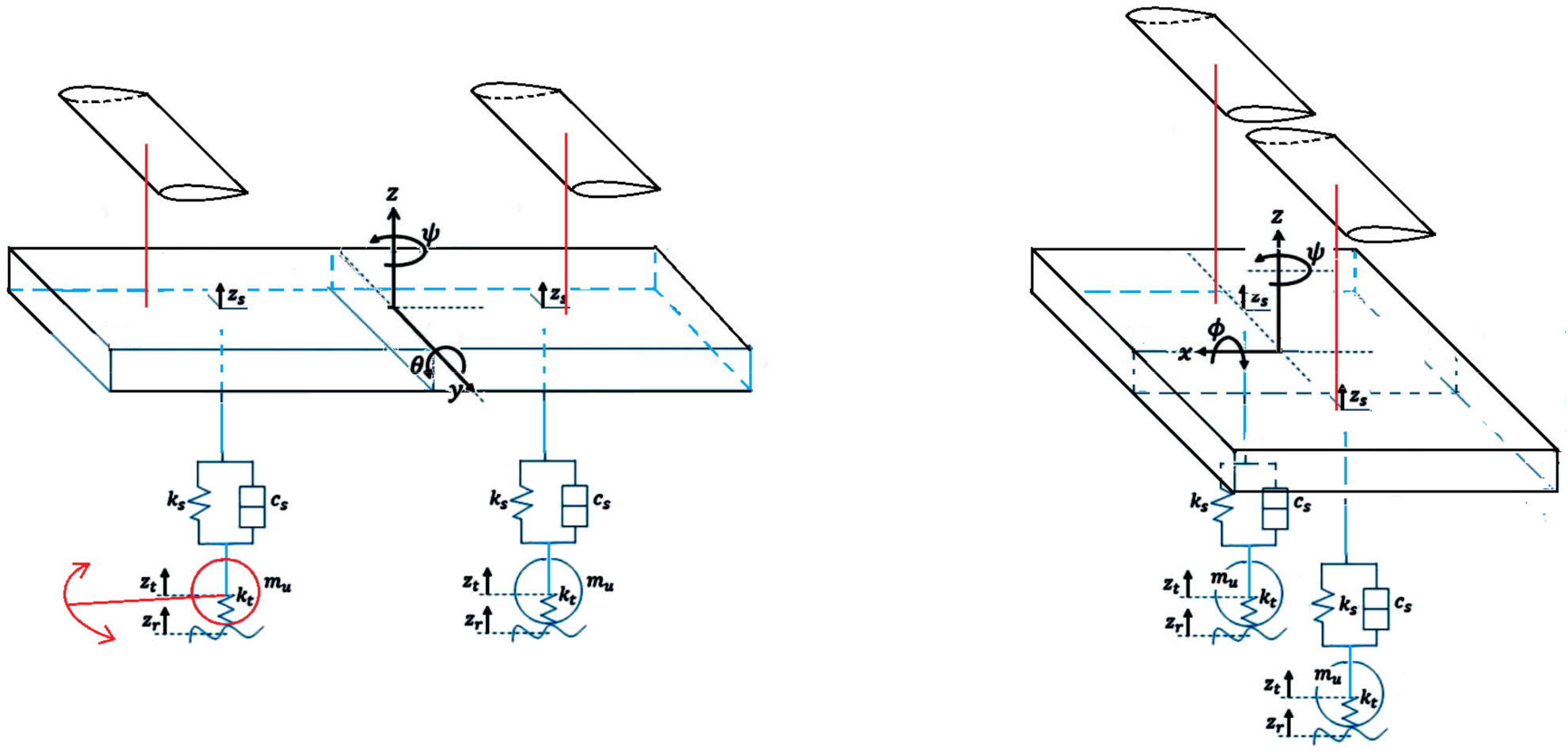
The limitations in steering range and speed that occur at high speeds can be compensated for by automatic correction systems using actuators to control the moving aerodynamic components. The main problem arising here is that the operating speed of the aerodynamic elements needs to be high. The authors make certain assumptions about the design and geometry of these elements (
Figure 22). The technical implementation of such elements appears to be a difficult technical problem. Other, unconventional ways of generating large and rapid changes in aerodynamic forces would be required.
An actively controlled wing mounted on a car can enhance ride comfort without influencing road holding performance. Therefore, the active wing device solves the conflict between ride comfort and road holding. The achievable ride comfort improvement increases progressively with increasing vehicle speed. However, the bandwidth of the wing actuator also plays an important role in achieving this performance. The design of the actuator rotating the wing will require special attention to attain a high frequency bandwidth and good overall system performance. Furthermore, the use of a single wing will always be accompanied by a trade-off between pitch and bounce enhancements. An extra active wing might solve this conflict.
The wing counters the motion caused by the irregularities of the road surface. Aerodynamic forces resulting from the body motion have to be included in the ride comfort analysis, because at high speeds these forces have the main effect on ride comfort but not on road holding.
The subsequent works of Ahmad et al. [
28,
29], conceptually similar to the work of Corno et al. [
22], based on a slightly more complicated mechanical model (half car model) interpreted once as transverse and once as longitudinal (
Figure 23), presented further positive conclusions on the effects of using automatic control systems of moving aerodynamic elements.
Two models were used independently to show improvement in ride comfort and improvement in vehicle handling and road holding ability during circle driving and lane change maneuvers resulting from the application of aerodynamic forces.
Car motion in two perpendicular planes (pitch and roll motion) were considered separately using the same kinematical model with different parameters.
Since previous research has shown that the conflict between the expectation of high ride comfort and vehicle adhesion to the road cannot be resolved by selecting mechanical damping parameters, it is necessary to look for other solutions. One solution is to use movable aerodynamic elements controlled in an appropriate manner by the vehicle dynamics control system. In this study, the car motion in two perpendicular planes (tilt angle and roll angle) was analyzed independently using the same kinematic model with different parameters.
The models discussed are much simpler than those presented in earlier works and the authors’ efforts were mainly focused on other systems for controlling the motion of aerodynamic components.
The aerodynamic characteristics of moving aerodynamic elements are still only an array of elementary properties of airfoils.
The presented results also indicate the possibility of improving the dynamic characteristics of the car by the controlled movement of the moving aerodynamic elements.
3.2.4. Models Controlling Vehicle Handling, Ride Comfort, and Road Holding (Full Car Models)
Ahangarnejad and Melzi [
30] proposed the addition of two individually controlled airfoils, front and rear, for the controlled generation of external aerodynamic forces to improve the dynamic stability of the car (
Figure 24). The behavior of a sports car is described using its dynamic model with 14° of freedom with an automatic control system for the angle of attack of the moving aerodynamic components. The purpose of the airfoil angle control system is to achieve the desired distribution of the car’s wheel forces leading to increased driving safety. The authors used the elementary aerodynamic characteristics of the airfoil to determine the instantaneous values of aerodynamic forces stored in the form of arrays.
The control system used signals that can be easily measured in the vehicle. These are lateral acceleration, vehicle rotation speed relative to the vertical axis, and vehicle speed. The control system attempts to zero out the difference between the product of the vehicle speed, the yaw rate, and the lateral acceleration. Changes in the aerodynamic distribution of the downforce of the airfoils on the front and rear axles affect the drift angles of the wheels and change the yaw rate.
To demonstrate the effectiveness of the control system, several typical maneuvers such as slow ramp steering, lane change maneuver, fishhook, and step steer were simulated for the vehicle with active and passive systems. The maneuver conditions were chosen so that the tires operated at the slip limit. Graphs of the time variation of the yaw rate, lateral acceleration, and lateral slip angle were presented. Similar comparisons were also presented for a lane change maneuver performed on wet asphalt (tire adhesion coefficient 0.6). It was shown that the use of the proposed control system improves the stability of the vehicle also under low tire adhesion conditions.
The two (0.2 m × 1.3 m) wings used on a vehicle about 4 m long do not seem excessive. The authors did not consider changes in the aerodynamic characteristics of the wings and body resulting from their interaction. Driving speeds were high.
3.2.5. Control Models Using Full Aerodynamic Information (Vehicle Models)
An extremely advanced and mature method for analyzing the performance of moving aerodynamic components was presented by Savkoor et al. [
31].
A complicated dynamic model (
Figure 25) and realistic CFD modeling of flow around the truck cabin in a virtual wind tunnel with a single moving airfoil and two airfoils enabled the coupling of the real aerodynamic characteristics of the moving aerodynamic elements with the dynamics model of the cab flexibly suspended on the truck frame.
The position of the movable aerodynamic element when complex forms of cabin vibration are present has a significant effect on their damping. Unfortunately, one moving element, depending on its position, can effectively damp only one of the vibration components. The solution was to use two airfoils located near the front and rear edge of the cabin roof. The range of change of attack angles of both airfoils is within their linear characteristics. The whole system of the cabin and the rest of the vehicle is excited by the modulated road irregularities.
Using CFD techniques, the actual aerodynamic characteristics of the airfoil at different angular settings were calculated considering the influence of cabin drag. These data were input into the cabin dynamics model.
3.2.6. Aerodynamic Models of Full Vehicles with Movable Aerodynamic Components
The first numerical models of full vehicles with moving aerodynamic components were probably presented by Kataoka et al. [
32]. This was also the first paper describing the principles of the use of movable aerodynamic elements in various driving conditions (acceleration, cornering, and braking) while providing information on their effect on the aerodynamic characteristics of the vehicle. In this work, the results of numerical and experimental research carried out in a wind tunnel and ending with the construction of the experimental vehicle HSR II were presented.
CFD numerical simulations were performed and aerodynamic characteristics were obtained, confirmed by the results of wind tunnel tests of two cars equipped with aerodynamic control devices, the experimental research car HSR II, and a production vehicle, the Mitsubishi 3000GT.
A characteristic feature of the HSR II was the use of a number of movable aerodynamic elements to change its aerodynamic characteristics to match the current road conditions. The following were mounted on the vehicle: a chin spoiler, two retractable canard wings, two independently controlled flaps, and a rear under flap. The flaps could be swung by an angle of 20° or 30°.
The paper presented the results of tests performed in three driving conditions.
In the high-speed curve driving condition, all individual movable aerodynamic components were active. In contrast, the canard wings and flaps present in the pair were activated only on the car side on the inside of the curve. The flap was turned by 20°.
The experiment showed an increase in the drag coefficient of 0.095, an increase in the downforce coefficient of 0.11, and an increase in the side force coefficient of 0.02 in this configuration compared with the configuration without active aerodynamic elements. During acceleration, the chin spoiler was extended and the drag coefficient increased by 0.01 with a 0.02 increase in the downforce coefficient. During braking, all elements were active, which caused the drag coefficient to increase by 0.21 and the downforce coefficient by 0.42. Both flaps were rotated by an angle of 30°.
A comparison of the numerical and experimental results showed that the numerical calculations significantly underestimated the aerodynamic drag coefficient and slightly overestimated the aerodynamic downforce.
The previous version of the HSR I vehicle had a chin spoiler and a single movable flap at the rear of the body. Drawings of the HSR II and HSR I vehicles are shown in
Figure 26.
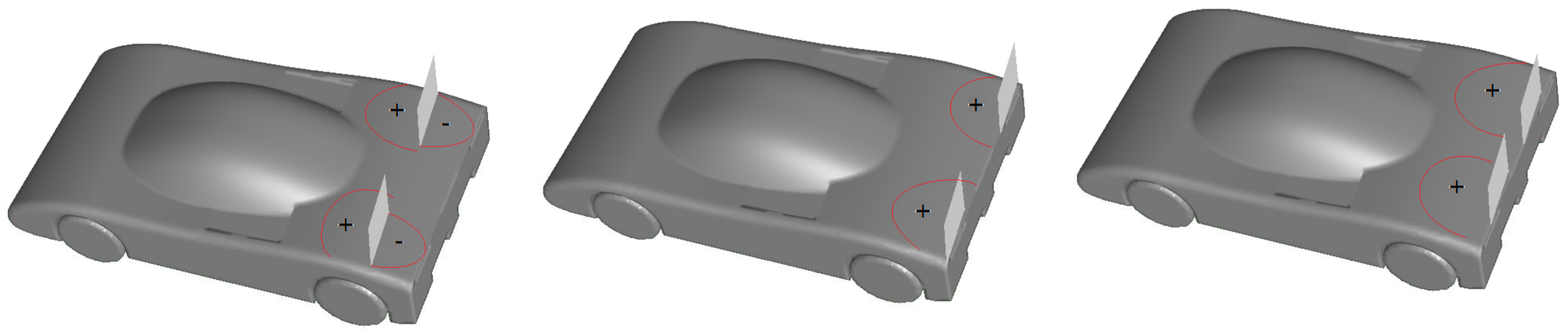
Some solutions of movable aerodynamic elements were used in the design of a series production vehicle. The Mitsubishi 3000GT VR4s from 1991 to 1996 were equipped with an Active Aero system consisting of a front air dam and a rear spoiler. The shaped air dam, when lowered, created a channel under the front of the body equivalent to a Venturi nozzle, generating in this area a pressure drop and a resulting downforce. A properly shaped air dam caused a pressure drop but did not cause flow separation nor an increase of aerodynamic resistance, which normally occurs behind a classical air dam design.
The study showed that when driving a car equipped with an aerodynamic package, the driver is less likely to make large corrections to the direction of the vehicle.
3.2.7. Coupled Mechanical-Aerodynamic (FSI) Models
Broniszewski and Piechna [
33] presented a very complex model of vehicle dynamics with time-varying aerodynamic characteristics occurring during the braking process.
In this process, the speed of vehicle motion, the position of its body located on the elastic suspension, the front and rear axle loads resulting from the action of inertia and aerodynamic forces, and the forces transmitted by tires at their contact with the road all change simultaneously. These quantities are instantaneous and interrelated. This is a typical FSI mechanical-flow coupling problem. It requires simultaneously solving the equations of motion of both the vehicle and its moving components and simulating the transient flow around its body. This requires the simultaneous use of two different simulation programs and a smooth exchange of information between them. Adams, ANSYS Fluent, and MATLAB/Simulink software were used for this purpose.
A nonlinear dynamic model of the whole car with a flexible suspension system and a movable wing, used as an aerodynamic brake, was built in a dedicated multi-body dynamic system environment: MSC. ADAMS/Car. Unsteady, realistic aerodynamic loads were obtained by CFD analysis using Fluent software. Both independent computational programs were integrated into a single ecosystem using a block diagram of a multi-domain simulation environment (MATLAB/Simulink) in which information exchange between the programs was controlled.
The complete model consists of a car dynamic model with 4° of freedom solved in the ADAMS program and a model simulating the aerodynamic properties of a vehicle with a variable geometry and time-varying position relative to the roadway realized in the ANSYS Fluent program. Both programs perform calculations simultaneously by exchanging the necessary data through MATLAB/Simulink. In this model, dynamic changes in the position of the body relative to the ground due to inertial and aerodynamic forces are taken into account.
This was the first paper to fully integrate a vehicle dynamics model with a full unsteady flow simulation model. The complex interconnection scheme between the programs was tested on an example of self-excited vibrations caused by the flow around a cuboidal beam. This is a simplified model of the famous Takoma Bridge demolished by self-excited vibrations caused by strong winds. Wind tunnel tests were performed. The mechanical parameters of the flexible beam suspension in the wind tunnel test space were measured and tests were performed during which the beam fell into self-excited vibrations caused by a cyclic vortical flow. A film recording of its movements was made. On the basis of these data, a model of the beam dynamics and a simulation flow model were created and simulations were performed using the developed system of information exchange between solvers.
A comparison of the results of the numerical simulations with the experimental data showed their complete agreement.
Such a validated scheme of relations between solvers has been used to analyze the braking process of a sports car with a movable inverted wing shifted to the aerodynamic braking position.
The decrease of car velocity occurring during braking required the adoption of a different reference system in the modeling associated with the roadway rather than the vehicle (
Figure 27).
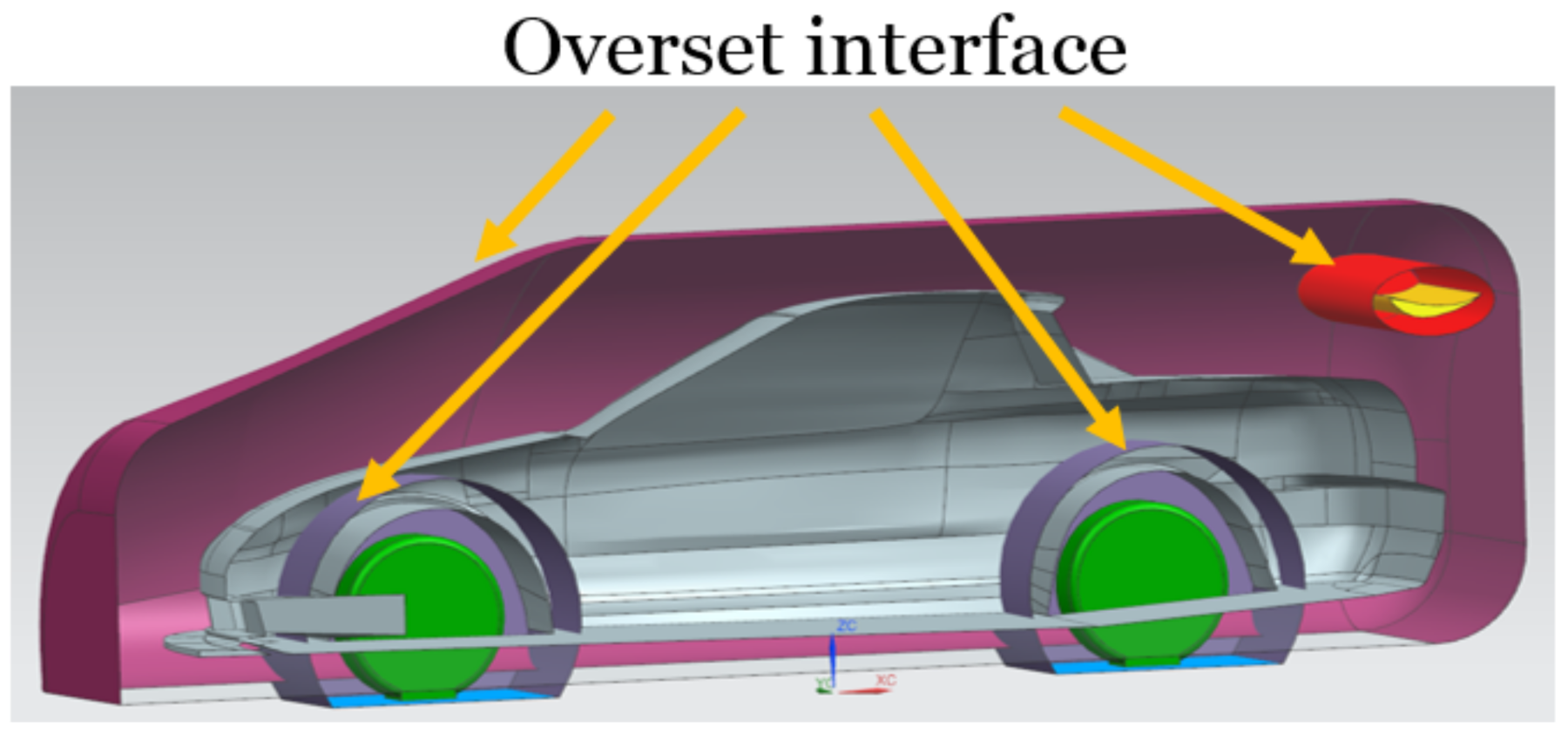
During the analysis, the entire area was moved at a speed that varied over time. To account for the motion of the car body and active aerodynamic surfaces in the simulation, the overset mesh technique was used. This technique is based on the use of meshes associated with a moving object moving on the background of the base mesh and exchanging information about flow parameters with it (see
Figure 28).
The results of numerical simulations were compared with the results of track measurements, during which a number of real vehicle motion parameters were recorded. A high agreement between simulation results and experimental data was noted.
The increased efficiency of the braking process with the use of a movable aerodynamic element as an aerodynamic brake was demonstrated.
Compared to existing solutions, the primary advantages of the proposed methodology for combining different simulation environments are flexibility and robustness.
Full coupled aerodynamic-mechanic simulations were performed by Huang et al. [
34]. This paper presented the results of a coupled vehicle dynamics simulation with a transient flow simulation in the presence of crosswinds. The strong influence of transient flow processes on the vehicle’s road behavior was shown. LES was used for the aerodynamic simulations, as this is currently the most accurate model of turbulent processes simulation. The vehicle model was simplified to a three-degree-of-freedom system. The driver’s reactions were included in the vehicle dynamics model. The deformable mesh method was used to account for vehicle motion.
The validation of the simulation model was performed by comparing the results of the experimental tests in a wind tunnel. Two models of vehicle motion were studied. In one model, there was full bidirectional coupling between the vehicle motion and its transient streamlining. In the other model, the coupling was unidirectional.
The analyses of the vehicle passage through the crosswind area showed smaller amplitude changes of yaw angular velocity and lateral acceleration for the full-coupled simulation compared with the one-way model. The analyses also showed the occurrence of the flow inertia effect after a fast crosswind change manifesting itself in larger amplitude changes of the lateral force and a longer recovery time.
To conclude, the significant influence of the transient flow processes on the values of the generated aerodynamic forces and the vehicle trajectory was indicated in the paper.


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}















