1. Introduction
In the past few years, the penetration of renewable energy sources (RESs), particularly wind- and PV-based sources, has been continuously growing in the present power system. These RESs are often integrated with interconnected loads and energy storage units and act as a single entity, called microgrid. A microgrid can be integrated with the main grid or it can also be operated autonomously [
1,
2]. When connected to the main grid, the voltage and the frequency of the microgrid are controlled by the main grid and the microgrid is controlled only to exchange a certain amount of active and reactive power with the main grid. However, an islanded microgrid must be responsible for its voltage and frequency control. Unlike the conventional power system where the power sources are dominated by synchronous generators (SGs), most microgrids are comprised of only inverter-based sources that possess low or negligible inertia. Therefore, islanded microgrids are more prone to frequency instability in the event of a sudden power imbalance [
3]. Some microgrids [
4,
5] which are more likely to be operated in islanded mode, also comprise SGs to have some amount of mechanical inertia. Still, the issue of frequency instability continues to be a major challenge in the operation of islanded microgrids.
In the conventional SG-dominated grid, frequency control is achieved in three stages, known as primary, secondary and tertiary frequency controls [
6,
7,
8]. The primary frequency controller (PFC) acts immediately after the occurrence of a disturbance and lasts for a few seconds. The purpose of PFC is to achieve the balance between power generation and demand after a disturbance. The droop-based controller is a widely accepted PFC in the conventional system. However, an inherent property of the droop controller is that it suffers from steady-state frequency deviation. Therefore, a secondary frequency controller (SFC) is required to regulate the frequency to the nominal value. The SFC is achieved by controlling the bias frequency of the SGs which lasts from a few seconds to minutes. The tertiary frequency control is implemented to minimize the total generation cost by optimizing the generation set-point of the SGs.
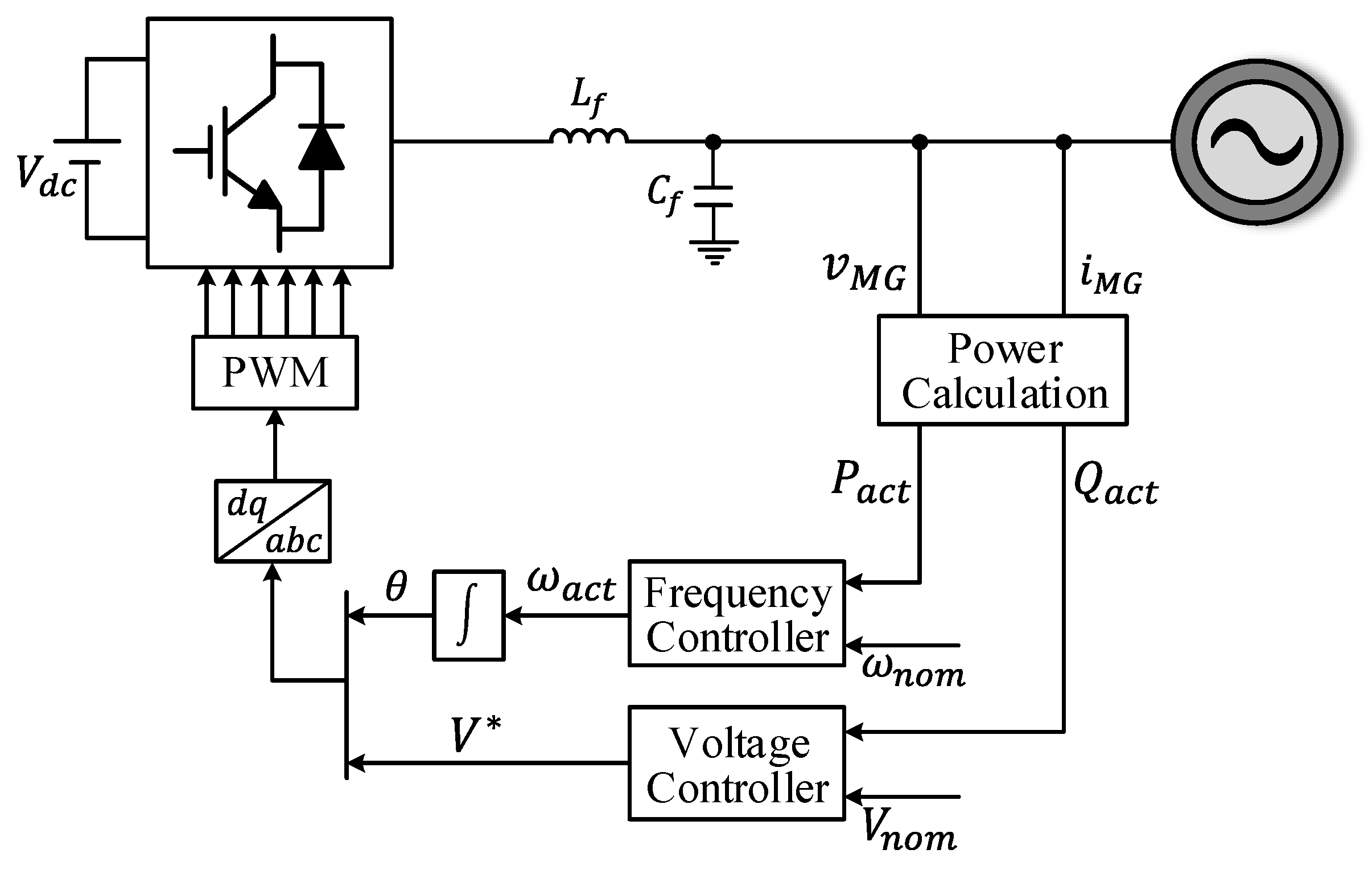
On the other hand, the PFC response of a microgrid is mainly governed by the control of inverters that interface the RES with the rest of the system. The grid-connected converters can be controlled in two modes, known as grid-forming mode and grid-following mode [
9]. An inverter, in grid-forming mode, acts as a voltage source and is responsible for controlling the magnitude and frequency/phase of the voltage. In a microgrid with 100% inverter-based sources, at least one inverter must operate in grid-forming mode. In the grid-following mode of operation, the inverter is controlled as a current source and exchanges a fixed amount of active/reactive power with the rest of the microgrid. In the mixed-source microgrid, where SGs are already operated as grid-forming units, the inverters of the RES have the flexibility of being operated either in grid-forming or grid-following mode.
In the literature, both modes of operation are explored for PFC in microgrids. However, the grid-forming mode has gained more attention in recent years. Within this mode, the droop-based control [
10] of a grid-connected inverter is a popular PFC method. However, in the absence of physical inertia, the frequency of the inverter changes suddenly with a change in its output power when operated with the conventional droop-based control. To address this issue, a variety of control methods with improvement of the conventional droop-based control have been proposed which are based on adaptively modifying the static droop coefficient of the conventional droop controller. For instance, [
11] proposes an adaptive decentralized droop controller that combines an adaptive transient droop function with the conventional static droop characteristic, which improves the frequency and power-sharing stability. The PFC method presented in [
12] adds a frequency derivative term to the power control loop of the conventional droop equation. Various other control techniques, such as neural network-based [
13], fuzzy-based [
14] and particle swarm optimization [
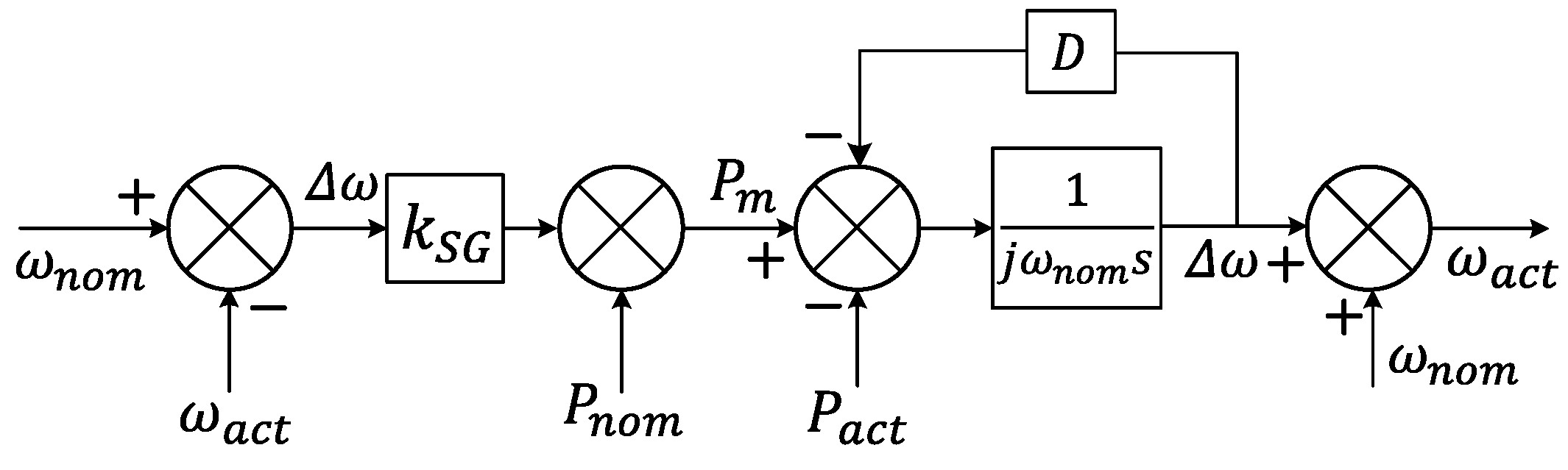
15], to name a few, were also explored to adaptively modify the droop coefficient. To provide inertia to the system, a virtual synchronous generator (VSG) control was proposed in [
16]. This method controls the frequency of a grid-connected inverter to mimic the characteristic of a droop-controlled SG. This method is also regarded as the generalized form of droop-based control with improved transient response [
17]. However, the VSG controller also suffers from power and frequency oscillation during a disturbance. Similar to the droop controller, various control techniques are explored to improve the performance of the VSG controller [
18,
19,
20,
21,
22,
23]. These techniques are based on adaptively modifying the virtual inertia and damping provided by the grid-connected inverter.
So far, the grid-following mode of operation, also known as P-Q mode, is little explored for frequency control. Traditionally, this mode of operation has been used to interface non-dispatchable RES sources to the main grid that are controlled to operate at a fixed amount of power. However, this mode of operation can also be used for PFC if the output of power of the inverter is controlled to compensate for the power imbalance in the system. With the advancement in fast-acting switches, microcontrollers and fast-responding BESS, the output power of a BESS can be controlled in real time for fast PFC in the microgrid. In [
24], the two modes of inverter operation are compared for PFC in an islanded microgrid and it is concluded that the performance of the grid-forming mode is better than the other one. However, in [
24], the output power of the inverter is not controlled in real time when operated in the grid-following mode. The PFC method proposed in [
25] implements a simple proportional–integral (PI) controller to control the output power of the BESS. The input to the PI controller is frequency deviation and the output is the reference power for the BESS. The issue with the implementation of the simple PI controller is that the variation in frequency is oscillatory with multiple harmonics. In such a condition, the reference power, hence the output power, of BESS also oscillates and the performance of the frequency controller is compromised.
This paper also implements a PI controller to determine the reference power of the BESSs. However, the proposed method first estimates the real-time power imbalance in an SG, which is then input to the PI controller to determine the reference power of the BESSs. The power imbalance in an SG is estimated using the initial RoCoF and the frequency-to-load transfer function (FLTF) of the SG. The salient features of the proposed PFC are as follows:
The proposed PFC fully compensates for the power imbalance in the microgrid without requiring communication among the BESSs.
The BESS controller requires the FLTF of only one SG to control its output power. Hence, the complexity of the proposed PFC does not increase with the increase in the number of BESSs and SGs.
The controller parameters of the BESSs can be selected such that the power compensated by the BESSs is proportional to their rating.
The proposed PFC does not require a secondary frequency controller (SFC), since there is no steady-state error.
3. Proposed PFC
3.1. Description of the Considered System for the Proposed PFC
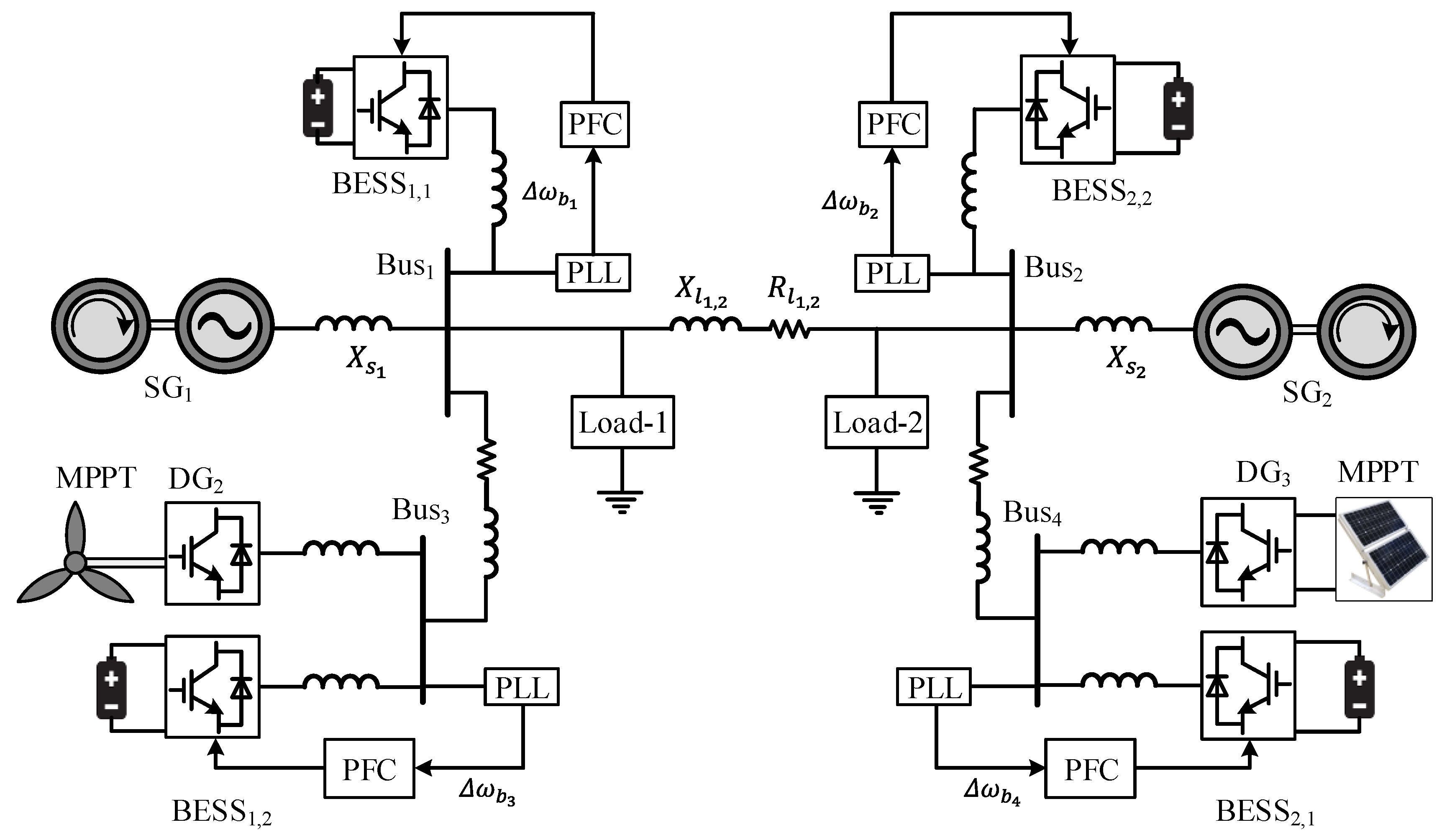
The microgrid configuration considered in this paper is comprised of multiple SGs, inverter-based RESs, BESSs and loads. An example of the considered system is shown in
Figure 4, where two SG-based sources, one wind and one PV-based power sources and four BESSs are interconnected. In general, the considered system for the proposed PFC can have any number of BESSs placed anywhere in the microgrid. The PFC of each BESS uses the FLTF of the nearest SG to determine its reference power. It should be noted that the nearest SG does not imply a neighboring SG. In this paper, the nearest SG refers to the SG which accounts for the minimum line impedance from a BESS as compared to other SGs. In
Figure 4, the BESSs are referred to as BESSi,j, where i represents the
ith SG and
j represents the
jth BESS which uses the FLTF of the
ith SG.
The SGs act as the grid-forming units and are operated in parallel with droop control. The inverters powered by wind and PV are represented as DGs. These DGs are operated in grid-following mode and controlled to extract the maximum power from the corresponding sources. Therefore, they are not considered to participate in frequency control. However, a change in output power from DGs affects the frequency of the system. In the considered system, the BESSs serve to provide frequency support in the event of a disturbance. The BESSs are also operated in grid-following mode. However, the output power of each BESS is controlled such that the addition of power supplied/absorbed by all the BESSs compensates for the power imbalance in the system in real time. The reference power of a BESS is determined using the change in frequency observed by the PLL and the FLTF of the nearest SG. It is assumed that the number of the BESSs may be more than that of SGs. Thus, the FLTF of one SG may be used by multiple BESS to determine their reference power.
3.2. FLTF of an SG and Estimation of Power Imbalance
The FLTF of the
ith SG is expressed as
where
and
are, respectively, the change in frequency and active power shared by the
ith SG during a disturbance. The FLTF of an SG depends on various factors, such as rotor parameters, speed governor characteristics and droop coefficients. Based on these factors, the FLTF, as derived in [
26], is given as
where
is the nominal frequency,
is the droop constant,
is the speed governor characteristic,
is the moment of inertia,
is the damping constant and
is the engine delay. Equation (7) is used to estimate the change in power supplied by the
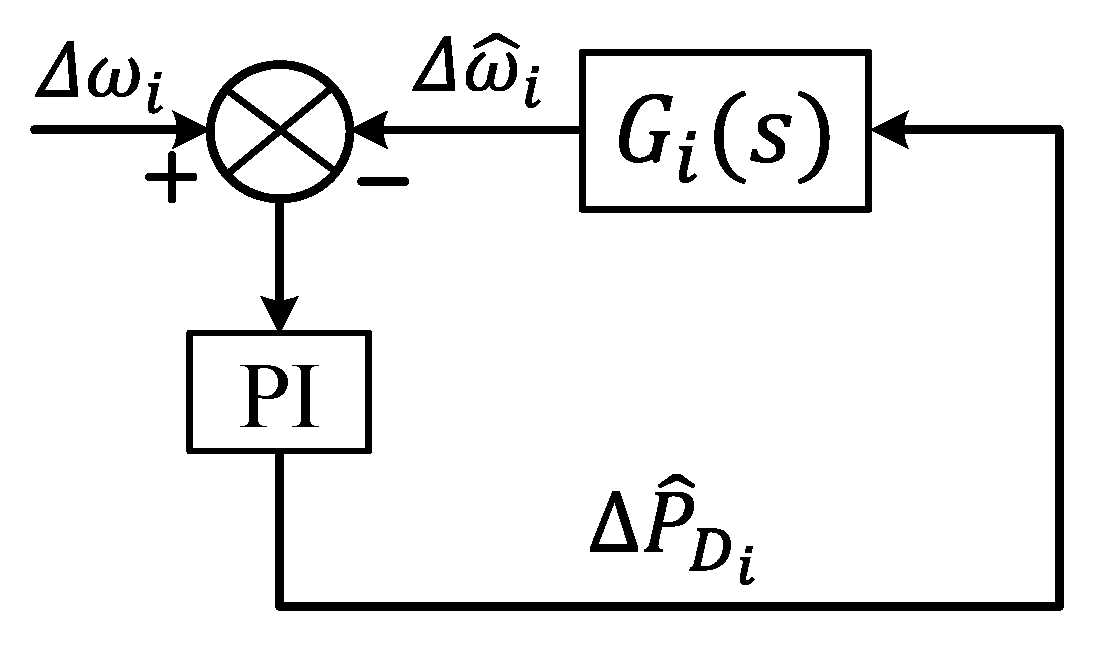
ith SG by observing the change in its bus frequency. The block diagram for the power estimation is shown in
Figure 5. As shown in
Figure 5, based on the initial guess of the power imbalance, an estimated value of the change in frequency (
) is evaluated using the FLTF derived in Equation (7). The estimated change in frequency is then compared with the actual change in frequency. Based on the error between the estimated and the actual value of frequency, the PI controller modifies the estimated change in power imbalance,
. The PI controller ensures that the estimated change in frequency equalizes the actual change in frequency, which leads to convergence of
towards
.
3.3. Frequency Division
In general, the variation of frequency of the SGs is not synchronized during the transient. This also leads to a difference in the bus frequency and the rotor frequency of an SG. The relation between the two frequencies is given by the frequency division rule [
27], based on which the change in frequency, at Bus-1 in
Figure 4, is given as
where
represents the frequency of the
ith bus,
and
are the synchronous reactance of the SG
1 and SG
2, respectively, and
and
are the resistance and reactance of the line connecting SG
1 and SG
2. In general, the frequency variation at any point in the system depends on the frequency of all the sources/generators. However, in Equation (8), the frequency of the DGs is not included as they are operated in grid-following mode. Additionally, the inductive impedance dominates in Equation (8), as the reactance of the SGs is much higher than the resistance of the line. Therefore, Equation (8) can be simplified as
Similarly, the change in frequency at Bus-2 is given as
In the considered system, as Bus-3 is connected to only Bus-1 and Bus-4 is connected to only Bus-2, the following equations can be written:
Note that Equations (11) and (12) are valid only for the considered system of
Figure 4. Nevertheless, for any system, the frequency of each bus can be obtained using the frequency division rule. The following subsection, without the loss of generality, uses Equations (11) and (12) to derive the expression of total power compensated by all the BESS and form the close loop structure of the proposed frequency controller.
3.4. Closed-Loop System for Power Imbalance Compensation
The closed-loop system of the proposed PFC is shown in
Figure 6, where
represents the power imbalance caused by a change in load or change in the power output from the RESs. The compensating power supplied by the BESS is represented by
. The resulting closed loop power imbalance (
) is supplied by the SGs and causes asynchronous variation of frequency. The corresponding change in the bus frequency is given by Equations (9)–(12) and is observed by phase-locked loop (PLL) at the BESS. Based on the observed frequency, the BESSs estimate the change in power supplied by the nearest SG during a disturbance. Based on the estimated change in power supplied by the nearest SG, each BESS sets its reference power using a PI controller, which is given as
where
represents the change in reference power and
and
are the constants of PI controller of the
jth BESS which is the nearest to the
ith SG. It is noted, from (13), that the reference power depends both on the frequency deviation and the constants of the PI controller. The constants of the PI controller of those BESSs, that use the FLTF of the same SG, are selected proportional to their power rating. Such a setting distributes the required compensated power based on the power rating of the BESS. Thus, choosing
where
is the power rating of BESSi,j and
and
are constants for all the BESS using the FLTF of
ith SG. In this paper, it is assumed that the BESS power controller is at least ten times faster than the power estimation loop which implies that the output power of the BESS follows its reference power. Therefore, using (13) and (14), the total power supplied by all the BESSs is given as
Using
from Equation (11) and
from Equation (12) in Equation (15),
where
and
are the total power rating of the BESSs that use FLTF of SG
1 and SG
2, respectively. Using Equations (9) and (10) to express Equation (16) in terms of rotor frequency of the SGs
Assuming the power rating of SG
2 is
times that of SG
1 and considering
and
are proportional to the SG rating in Equation (7), the relation between the FLTF of the two SGs can be approximated as
considering that the per-unit value of the synchronous reactance of the SGs is typically the same with respect to their base. This implies that the actual value of the synchronous reactance is inversely proportional to the power rating of the SG, resulting in
Using Equations (18) and (19) in Equation (17),
Expressing
and
, in Equation (20),
Equation (21) shows that the total power compensated by the BESSs, which uses the FLTF of an SG, is proportional to the change in power supplied by that SG during the transient. Additionally, the constants
and
can be selected such that
Applying Equation (22) in Equation (21),
From Equation (23), it is noted that the total power supplied by all the BESS in the system is directly proportional to the closed-loop disturbance in the system. From
Figure 6 and Equation (23), the closed-loop transfer function of power imbalance can be obtained as
As , and are positive constant, the closed-loop transfer function in Equation (24) is stable and guarantees zero power imbalance, hence zero frequency deviation, in the steady state.
3.5. Sensitivity Analysis
A sensitivity analysis is carried out to analyze the robustness of the proposed frequency controller as the system derived in Equation (24) may not be accurate for a practical system. The variation may occur due to the following non-idealities:
The presence of non-linearities in the frequency dynamics which are neglected in the derivation of the FLTF of SGs.
Presence of finite resistance of the transmission lines.
Finite bandwidth of PLL, power estimation loop and power control loop.
The above factors affect the estimation of the change in power supplied by SGs during a disturbance. Although the derivation of the closed-loop system, considering each one of the above factors separately, is beyond the scope of this paper, an aggregate of their effect can be analyzed by including an error term in the estimation of total power imbalance. Modifying Equation (24) to include the aggregated error in power imbalance estimation as
where
is the per-unit error in the estimation of total power imbalance and
is the actual power compensated by all the BESSs considering the error in the power estimation. Accordingly, the closed-loop transfer function is modified as
Applying the final value theorem to Equation (26), the steady-state power imbalance converges to zero if the stability of the system is guaranteed, which can be determined by analyzing the pole of the transfer function in Equation (26). From Equation (26), the pole is obtained as
It is observed, from Equation (27), that the pole of Equation (26) is negative if for any value of positive and . Note that a very high value of the PI controller parameter may destabilize the system due various factors, such as PLL dynamics, finite control bandwidth of power estimation power controller loops, the time constant of the two loops, etc. Moreover, a further addition of BESSs may equivalently increase and . However, finding out the exact range of and for stable operation is considered for future work and is not in the scope of this paper.
4. Model Description for Case Study
To verify the efficacy of the proposed method, real-time simulations were performed on the Typhoon Hardware-in-the-loop simulator. The system for the case study was modeled similar to the considered system shown in
Figure 4. The model consisted of two SGs, two DGs, three BESSs and two loads. The SGs were termed as SG
1 and SG
2 and their rating was 550 KVA and 1.1 MVA, respectively. The power rating of both the DGs was selected as 500 kW. Practically, the microgrid consisted of a higher number of DGs, each with a lower power rating. However, due to the limitation of the size of the model in the Typhoon simulator, the combined effect of all the DGs was modeled as only two DG for the case study.
The total active power demand in the microgrid was realized by two equivalent loads: Load-1 as 1.5 MW and Load-2 as 500 kW. The equivalent Load-1 represented the loads with constant power demand, while the varying loads were modelled as the equivalent Load-2. Although the total number of the BESSs is four, in
Figure 4, the simulation model used only three BESSs (BESS
1,1, BESS
1,2 and BESS
2,1) due to the limitation on the size of the model in the Typhoon real-time simulator. The model of each BESS consisted of a battery pack and a three-phase inverter that interfaced the battery pack with the microgrid as shown in
Figure 4. The model of the battery pack was a voltage source in series with internal resistance. The nominal voltage of each battery pack was selected as 240 V. The nominal capacity of BESS
1,1 was 100 Ah and that of BESS
1,2 and BESS
2,1 was 200 Ah each. The nominal continuous charge/discharge current was 1 C, while the peak charge/discharge current was 5 C. Other relevant simulation parameters of the microgrid are provided in
Table 1.
6. Conclusions
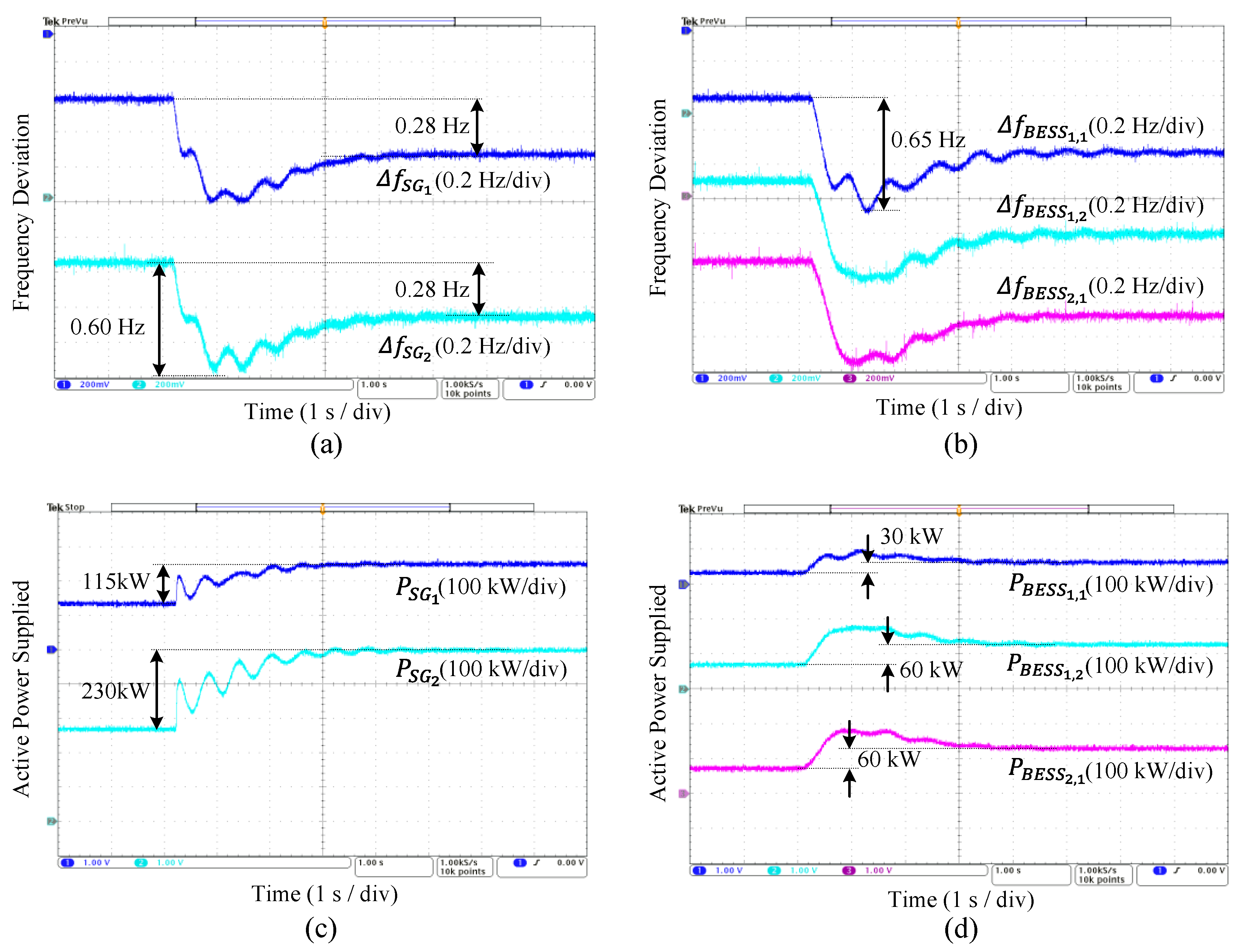
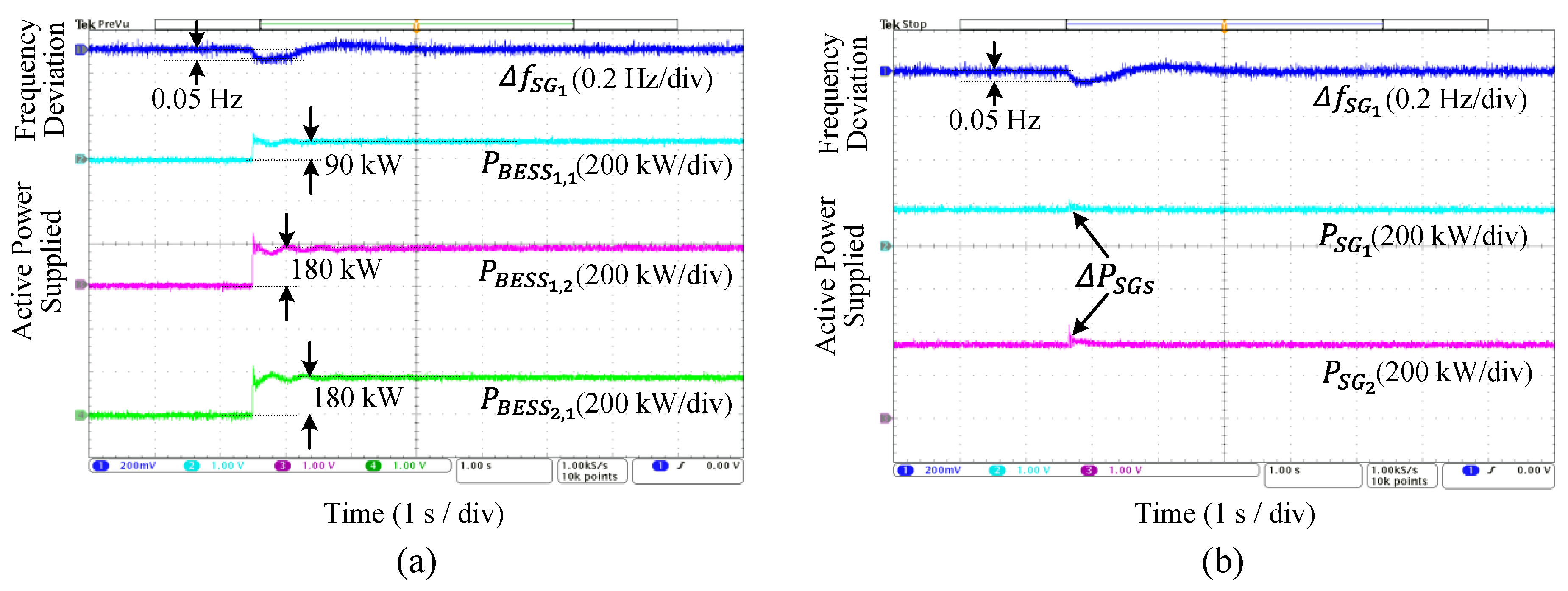
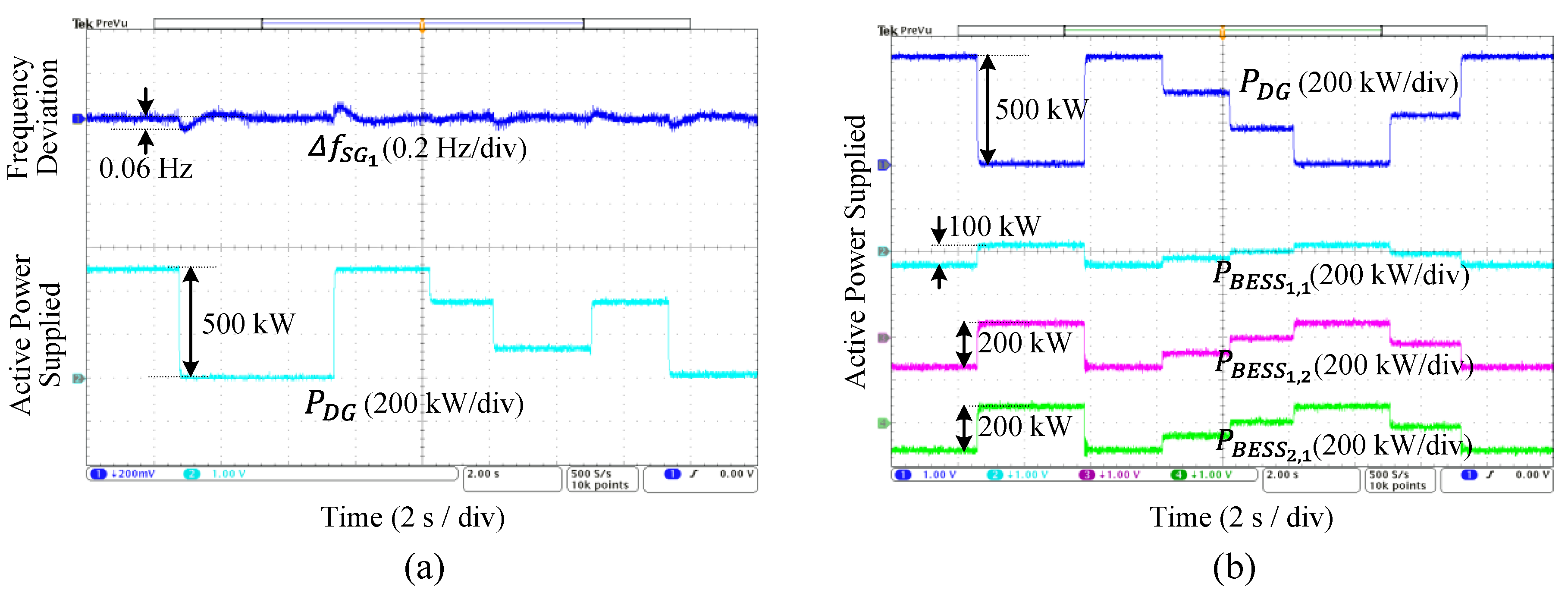
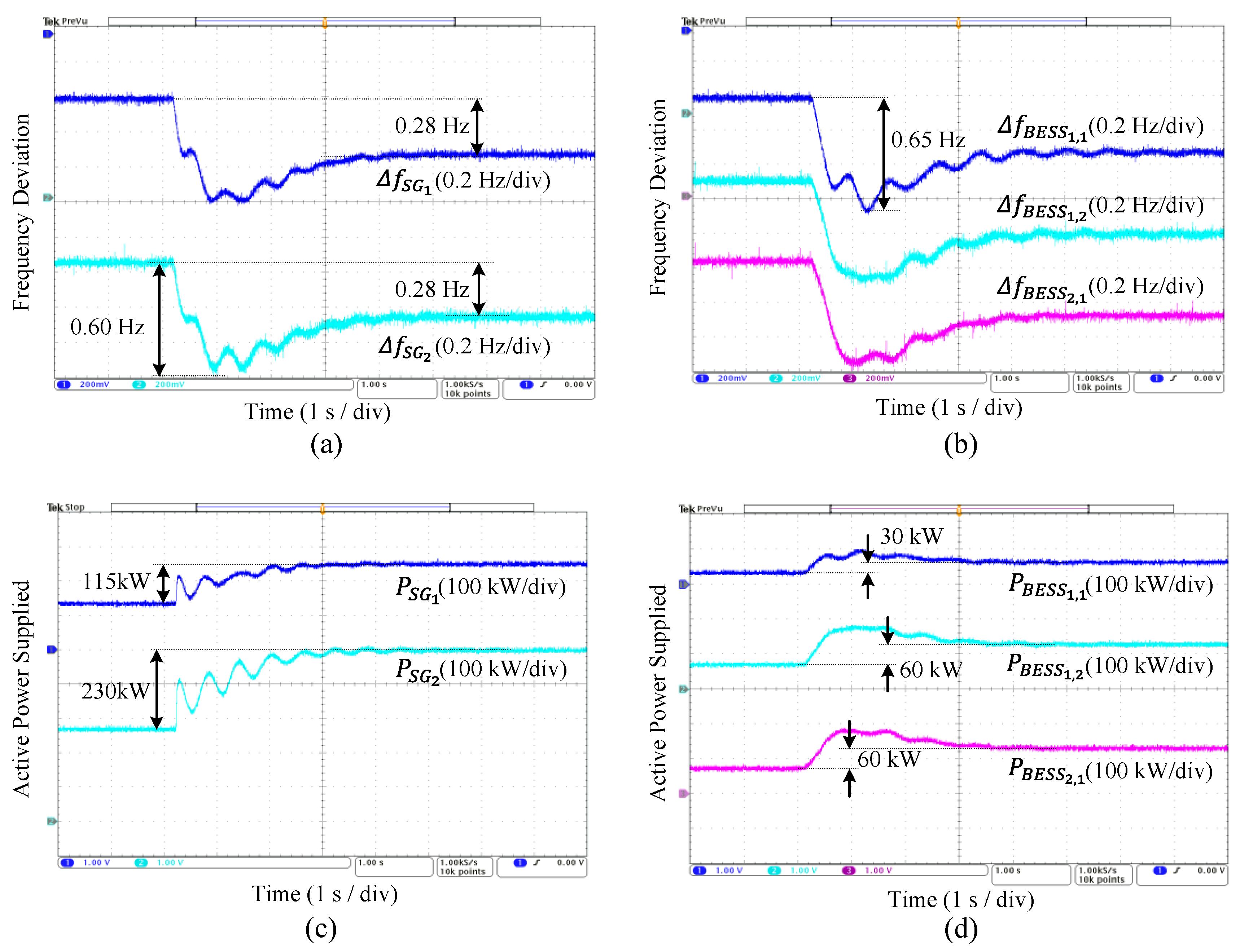
This paper presents a fast frequency control method for an islanded microgrid using multiple small-scale BESSs. The proposed PFC is based on estimating the power imbalance during the transient and compensating it using multiple small-scale BESSs. The performance of the proposed controller is compared with that of the conventional VSG-based controller for a sudden change in constant impedance load, which was rated as 500 kW at nominal voltage. Using the proposed frequency controller, the peak frequency deviation was limited to 0.06 Hz, which was observed as 0.65 Hz, using the conventional VSG-based controller. Additionally, the proposed frequency controller does not require SFC as the steady-state error in the frequency is zero. However, the total power rating of the BESSs must be more than the maximum possible disturbance in the system to achieve zero steady-state error. If not, the simulation result shows that the remaining amount of power is supplied by the SGs, which results in steady-state frequency deviation. Still, the frequency deviation using the proposed method is less than that of the VSG controller, as the proposed method utilizes the full capacity of the BESSs. Therefore, it is concluded that the frequency response of the proposed controller is better than the VSG controller in terms of speed and steady-state error and can be achieved at the cost of a higher total power rating and a more frequent charging–discharging of the BESSs.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}