Author Contributions
Conceptualization, M.N. and W.S.; methodology, M.N.; software, M.N.; validation, M.N. and W.S.; investigation, M.N.; resources, M.N. and W.S.; data curation, M.N.; writing—original draft preparation, M.N.; writing—review and editing, A.H., M.N. and W.S.; visualization, M.N.; supervision, W.S. All authors have read and agreed to the published version of the manuscript.
Figure 1.
Model predictive control (MPC).
Figure 1.
Model predictive control (MPC).
Figure 2.
Types of model predictive control.
Figure 2.
Types of model predictive control.
Figure 3.
Continuous control set model predictive control (CCS-MPC).
Figure 3.
Continuous control set model predictive control (CCS-MPC).
Figure 4.
Finite control set model predictive control (FCS-MPC).
Figure 4.
Finite control set model predictive control (FCS-MPC).
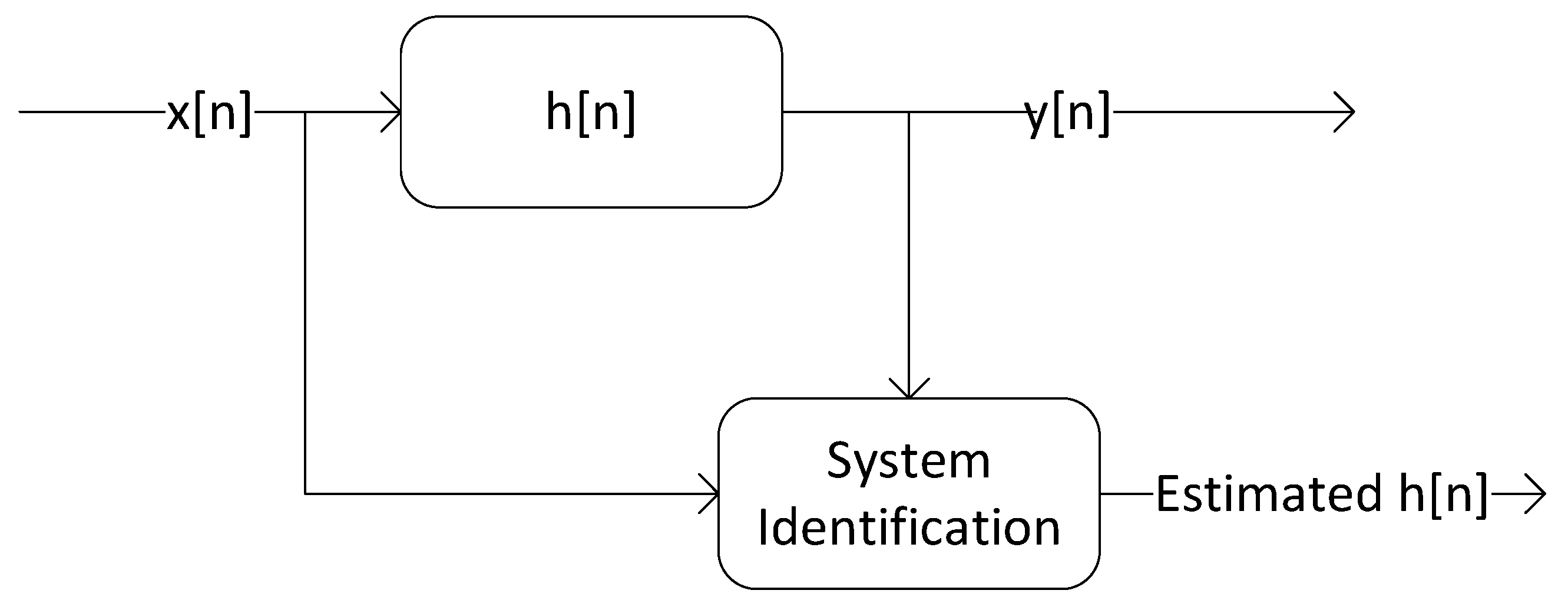
Figure 5.
Model-free approach.
Figure 5.
Model-free approach.
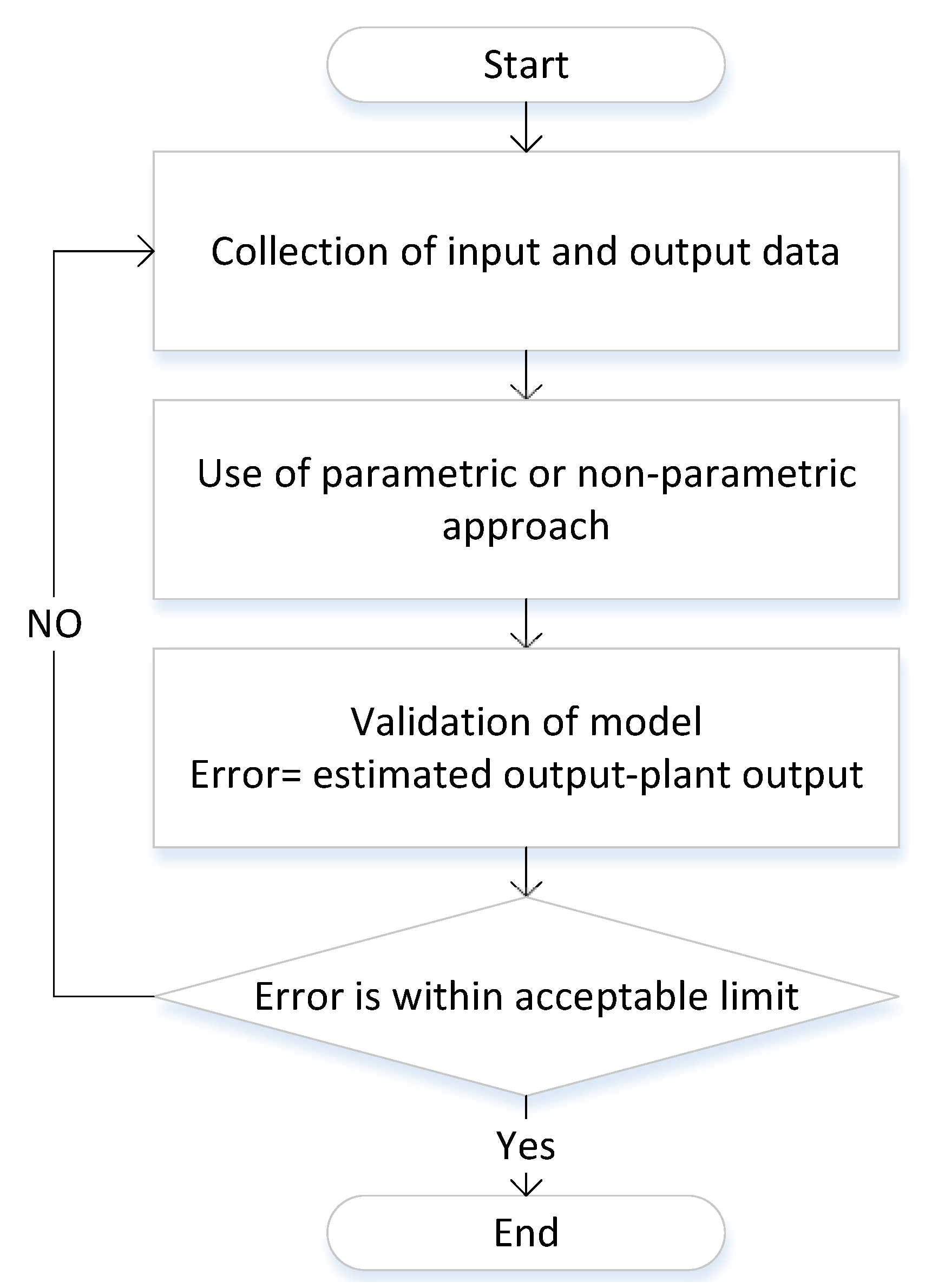
Figure 6.
Model-free approach process.
Figure 6.
Model-free approach process.
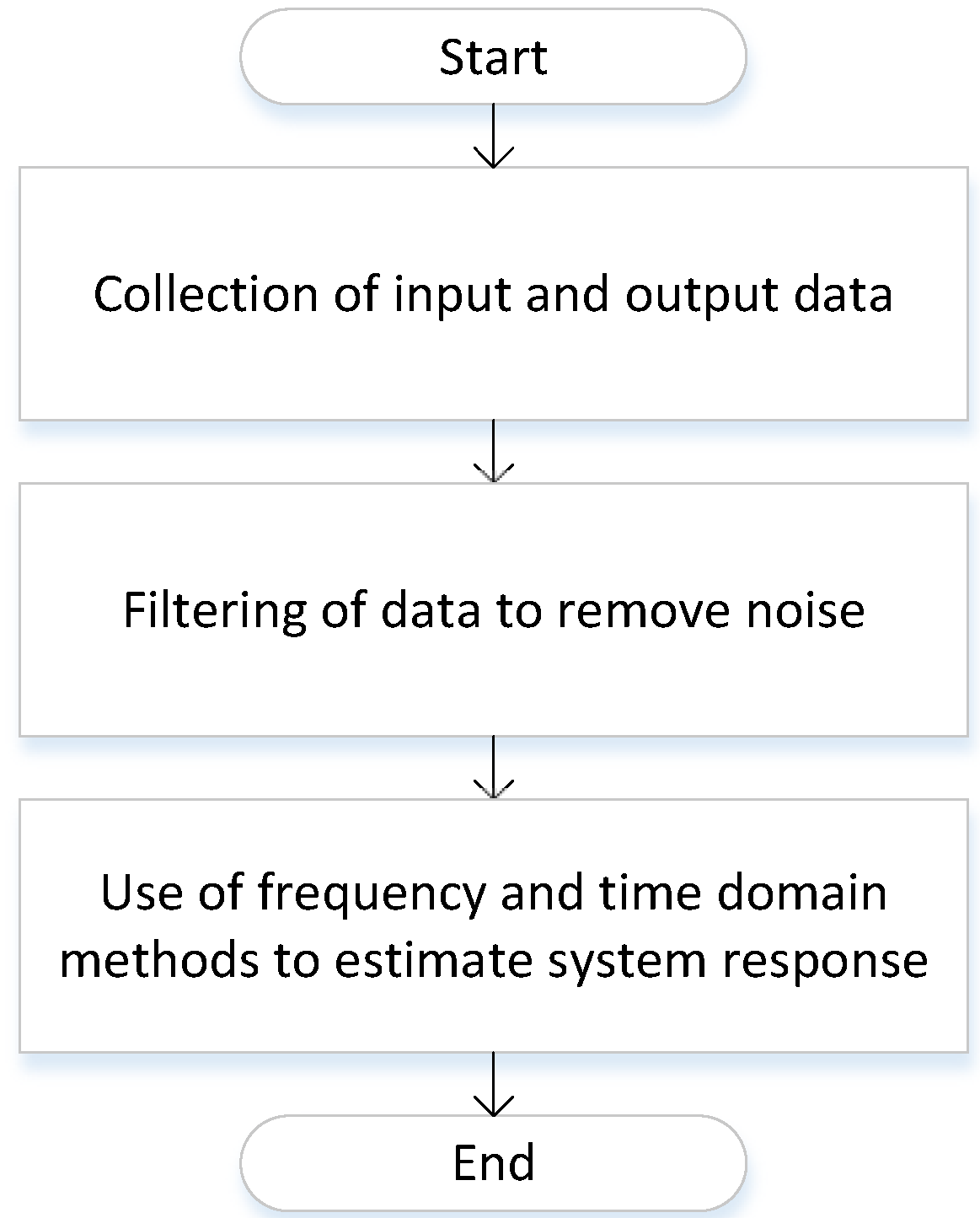
Figure 7.
Non-parametric approach.
Figure 7.
Non-parametric approach.
Figure 8.
Parametric approach.
Figure 8.
Parametric approach.
Figure 9.
Model-free predictive control (MFPC).
Figure 9.
Model-free predictive control (MFPC).
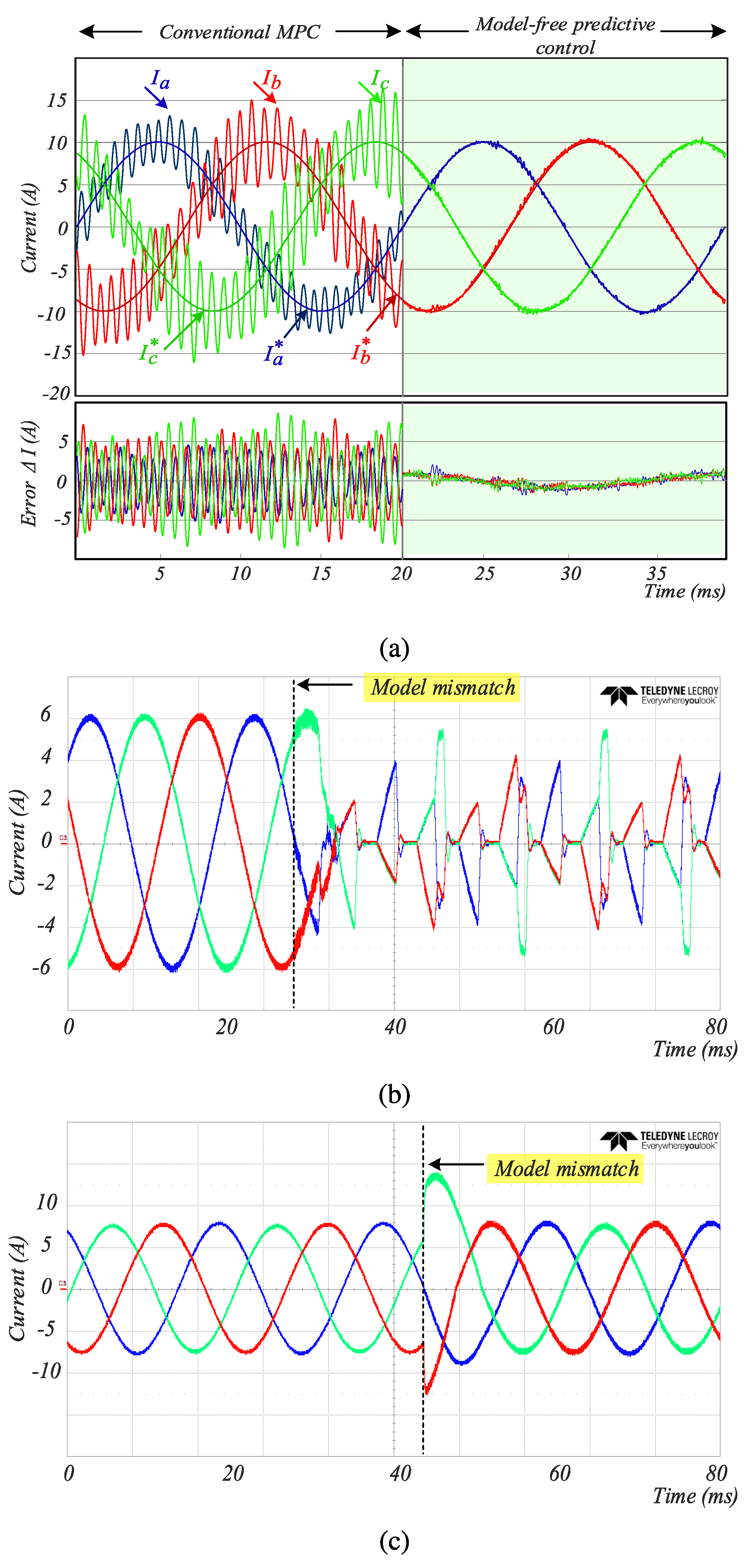
Figure 10.
Performance comparison of FCS−MPC and MFPC. (a) FCS−MPC and MFPC with model mismatch. (b) MPC performance. (c) MFPC performance.
Figure 10.
Performance comparison of FCS−MPC and MFPC. (a) FCS−MPC and MFPC with model mismatch. (b) MPC performance. (c) MFPC performance.
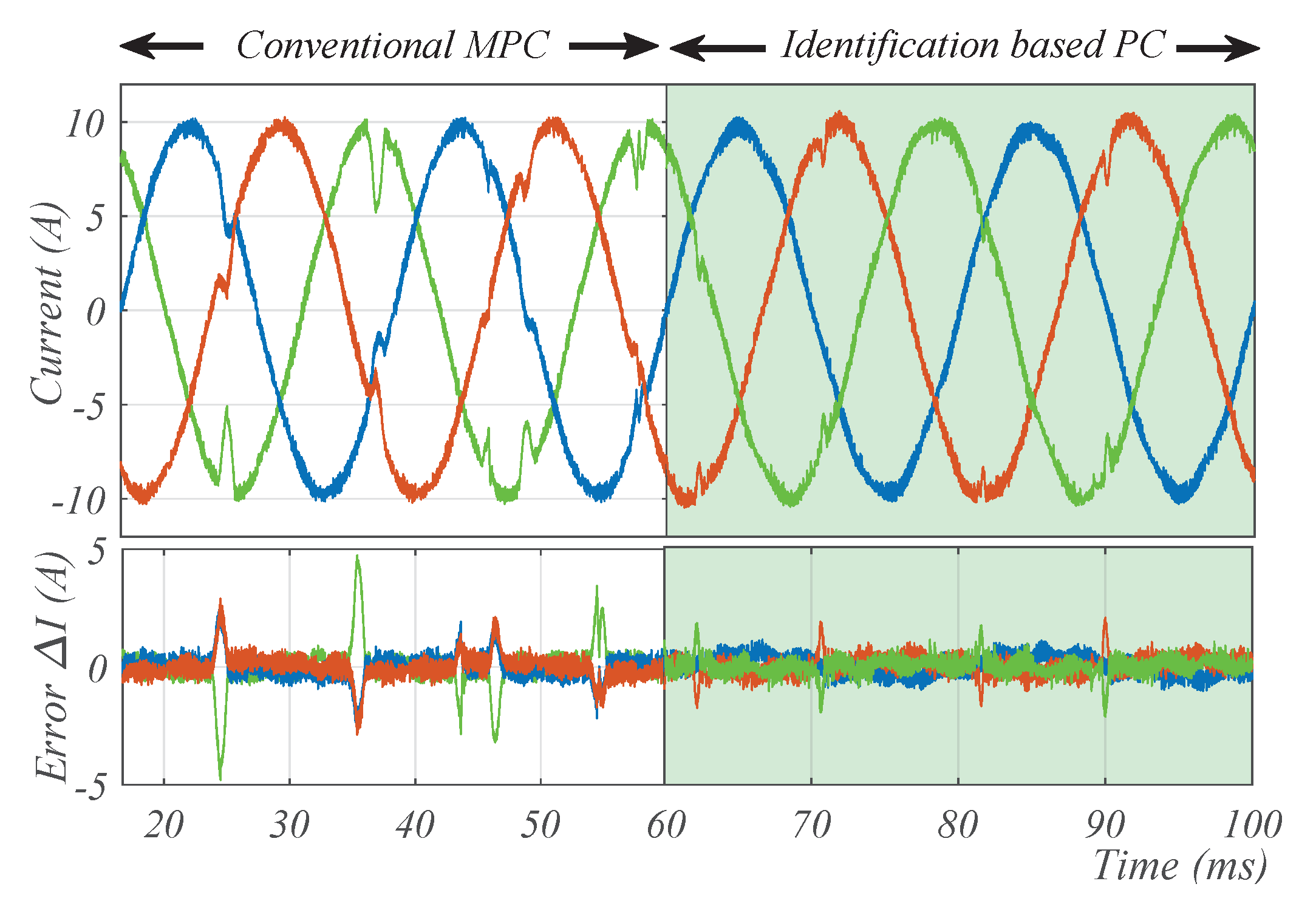
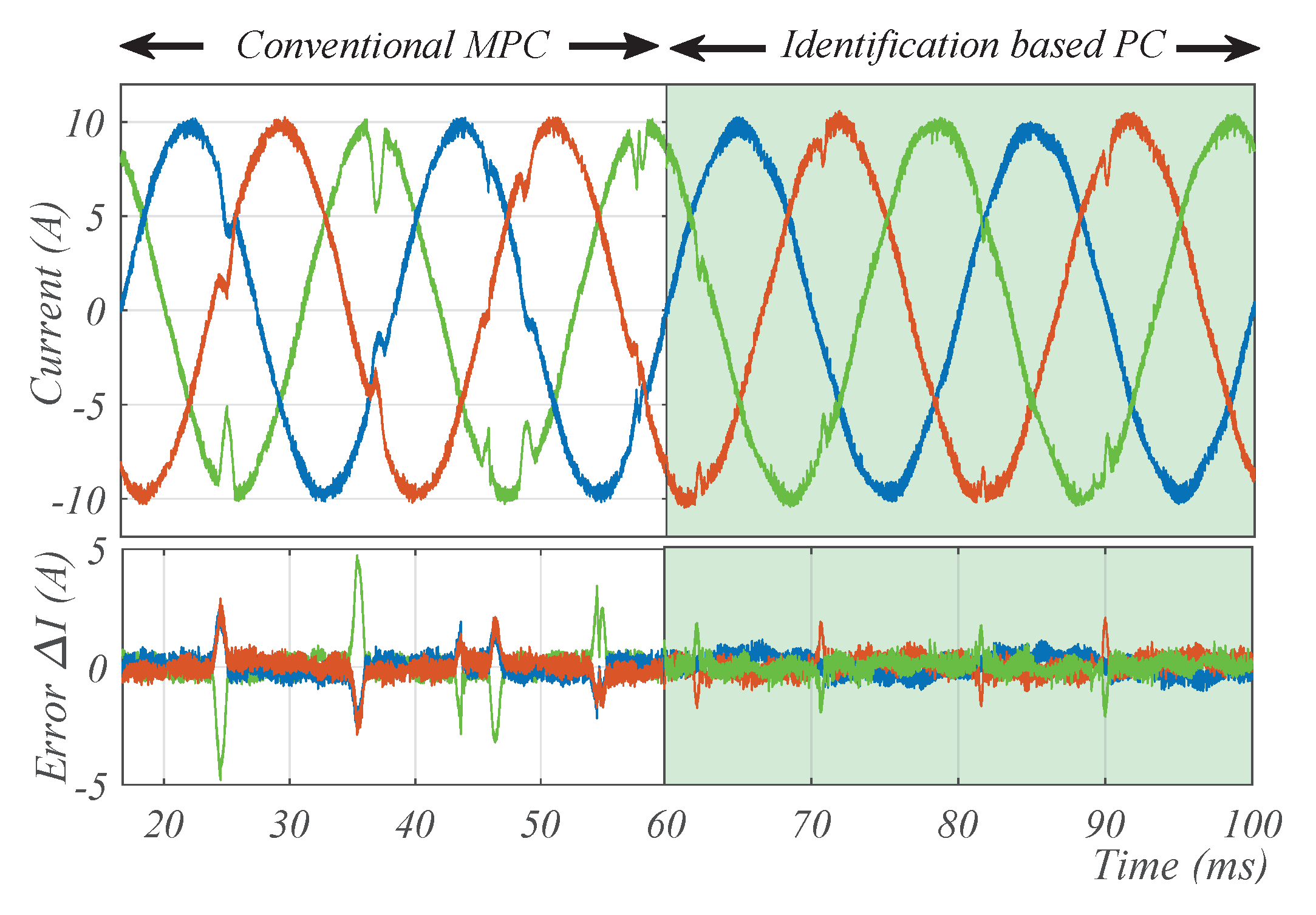
Figure 11.
Performance comparison of conventional MPC and proposed MFPC.
Figure 11.
Performance comparison of conventional MPC and proposed MFPC.
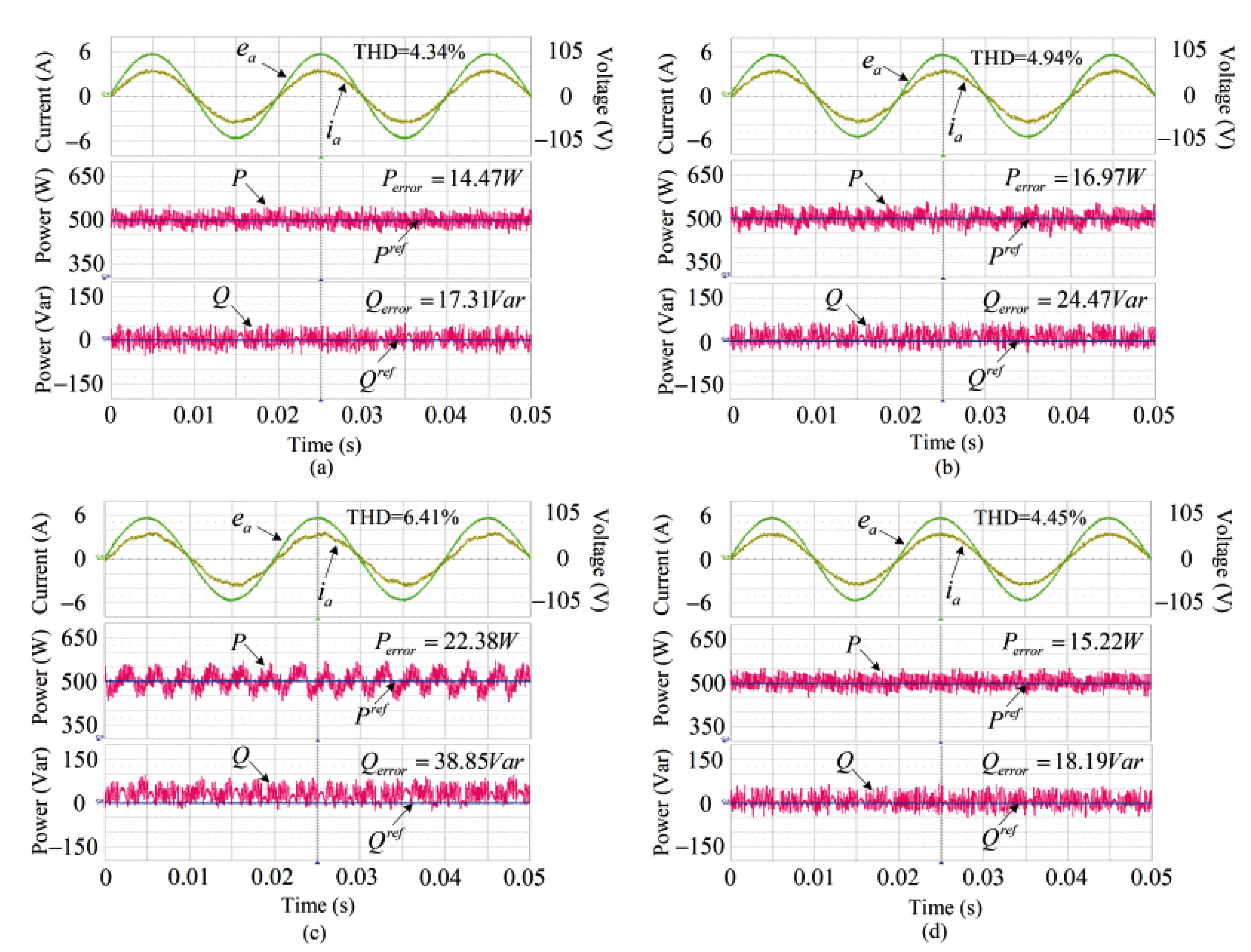
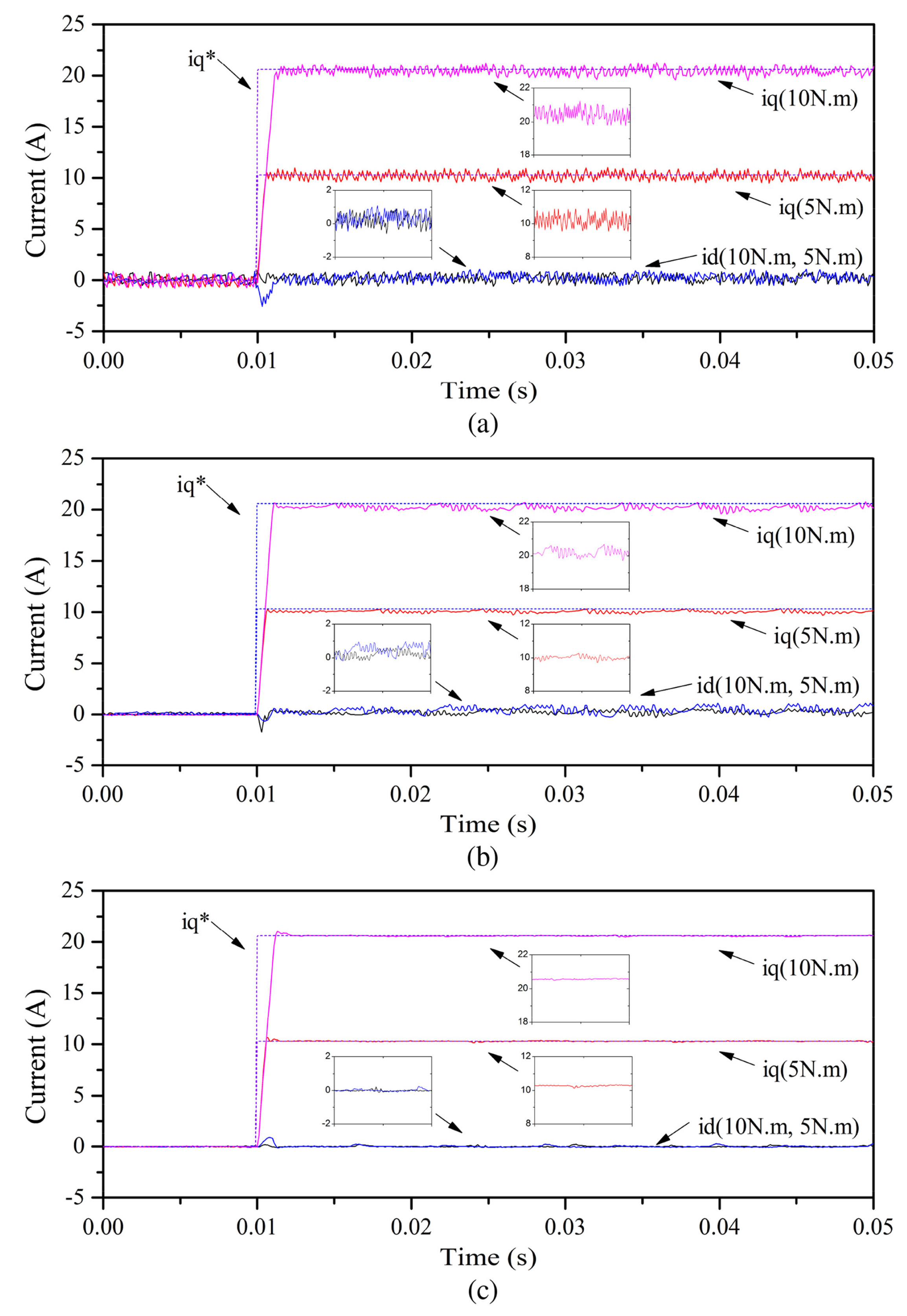
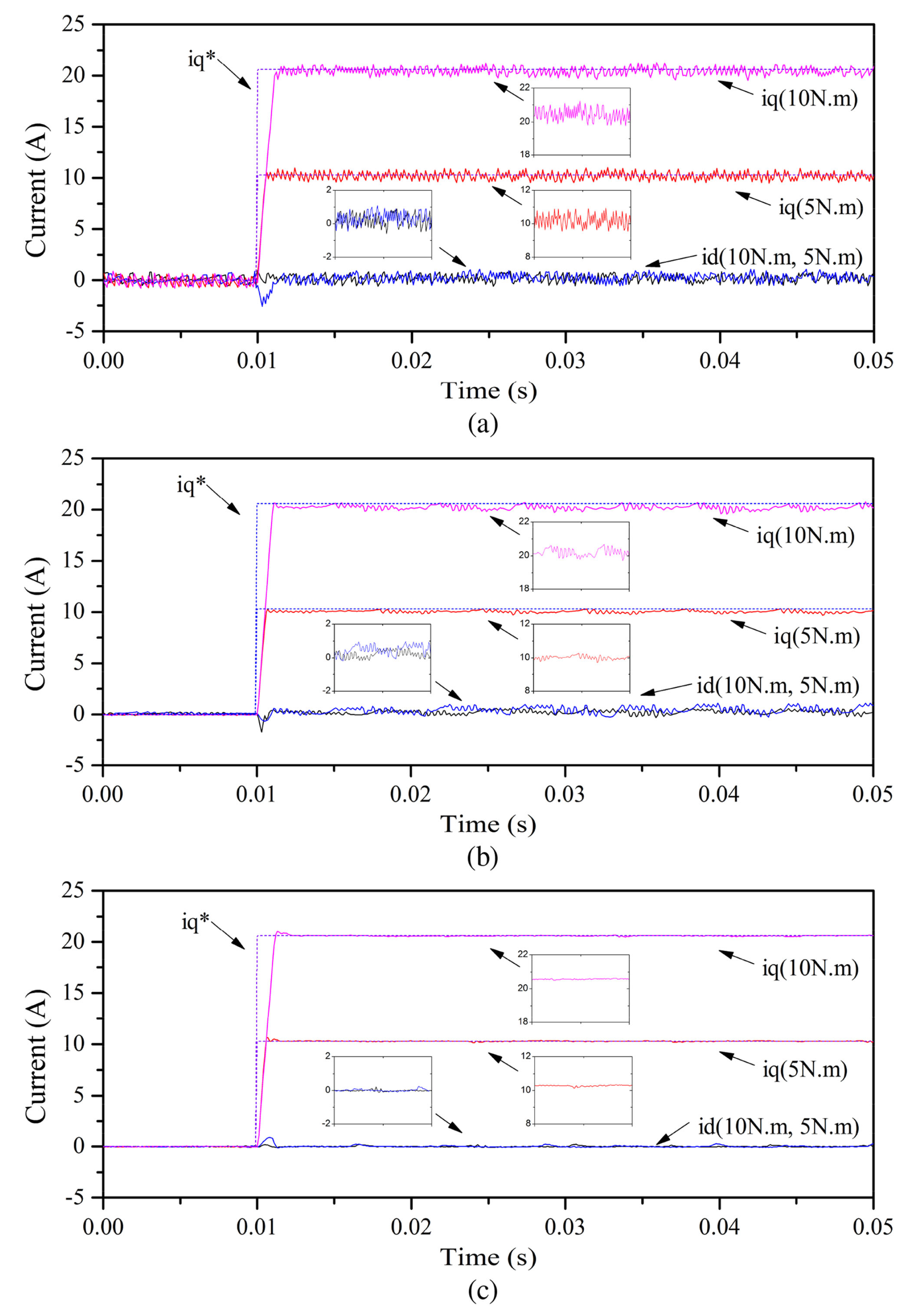
Figure 12.
Performance comparison of different approaches. (a) MPC with the ideal model. (b) MPC with model mismatch. (c) MPC with model mismatch. (d) Proposed MFPC.
Figure 12.
Performance comparison of different approaches. (a) MPC with the ideal model. (b) MPC with model mismatch. (c) MPC with model mismatch. (d) Proposed MFPC.
Figure 13.
Comparison of MPC and MFPC with accurate model.
Figure 13.
Comparison of MPC and MFPC with accurate model.
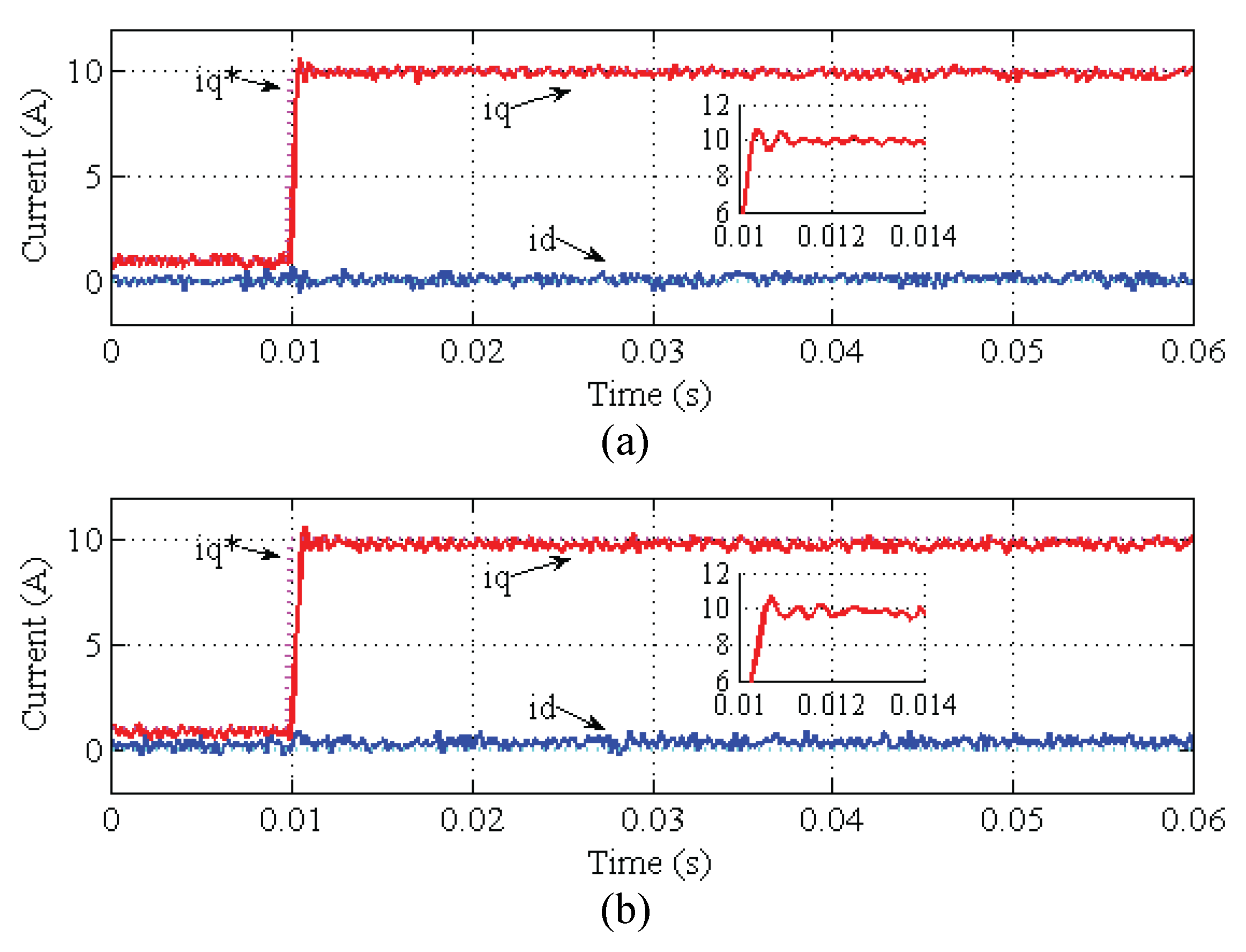
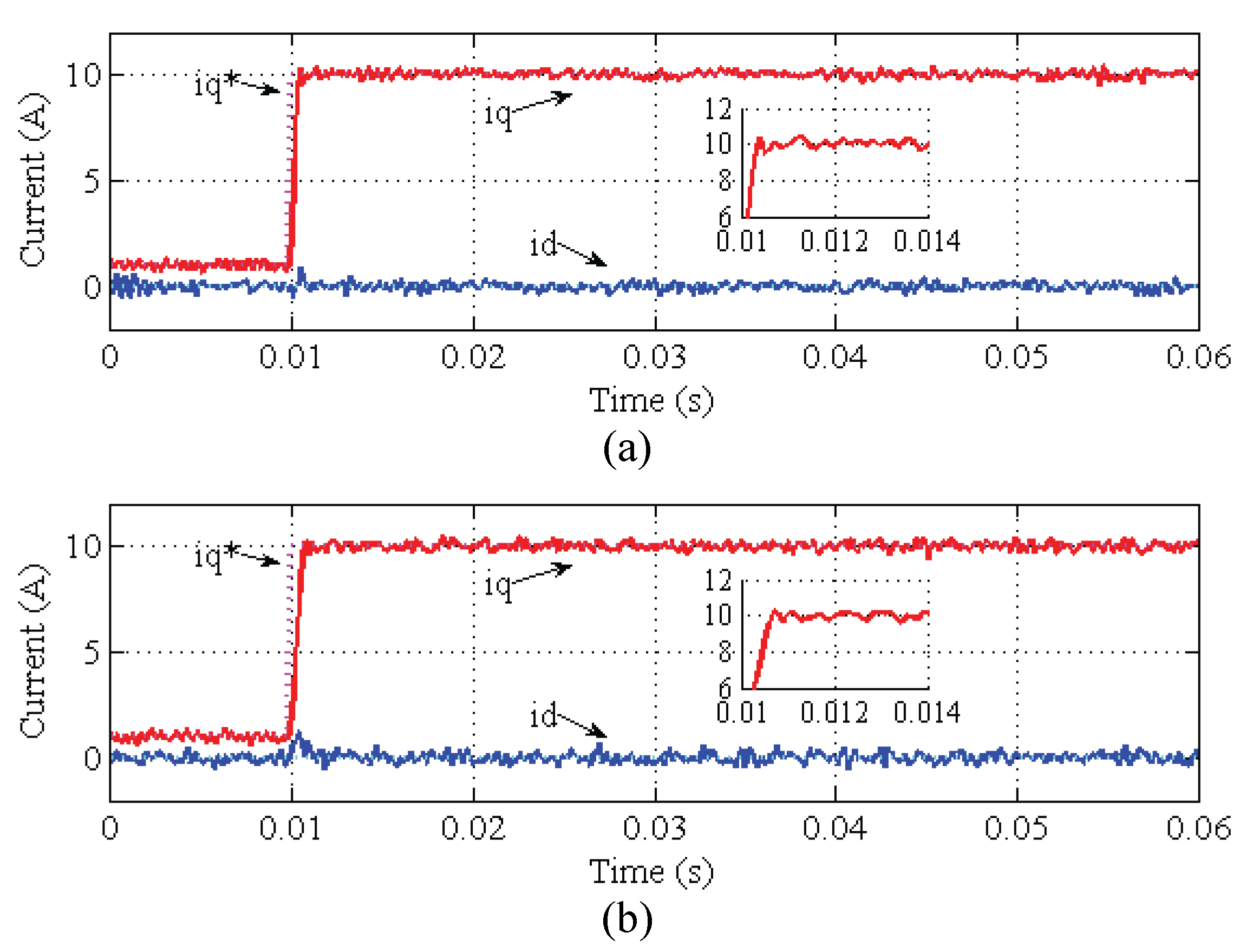
Figure 14.
Comparison of MPC and MFPC with model mismatch. (a) MPC with model mismatch. (b) MFPC with model mismatch.
Figure 14.
Comparison of MPC and MFPC with model mismatch. (a) MPC with model mismatch. (b) MFPC with model mismatch.
Figure 15.
(a) Conventional FCS−MPC. (b) Duty cycle MPC. (c) Model−free predictive control.
Figure 15.
(a) Conventional FCS−MPC. (b) Duty cycle MPC. (c) Model−free predictive control.
Figure 16.
Dynamic performance of model-based method for dq axis currents: (a) 100 rpm; (b) 400 rpm.
Figure 16.
Dynamic performance of model-based method for dq axis currents: (a) 100 rpm; (b) 400 rpm.
Figure 17.
Dynamic performance of model-free method for dq axis currents: (a) 100 rpm; (b) 400 rpm.
Figure 17.
Dynamic performance of model-free method for dq axis currents: (a) 100 rpm; (b) 400 rpm.
Figure 18.
dq−axis stator currents response at 100 rpm. (a) FCS−MPC. (b) FS−MMFPC. (c) MSL−MMFPC.
Figure 18.
dq−axis stator currents response at 100 rpm. (a) FCS−MPC. (b) FS−MMFPC. (c) MSL−MMFPC.
Figure 19.
Comparison between model-based predictive control and model-free predictive control. (a) = 25% rated load. (b) = 25% rated load.
Figure 19.
Comparison between model-based predictive control and model-free predictive control. (a) = 25% rated load. (b) = 25% rated load.
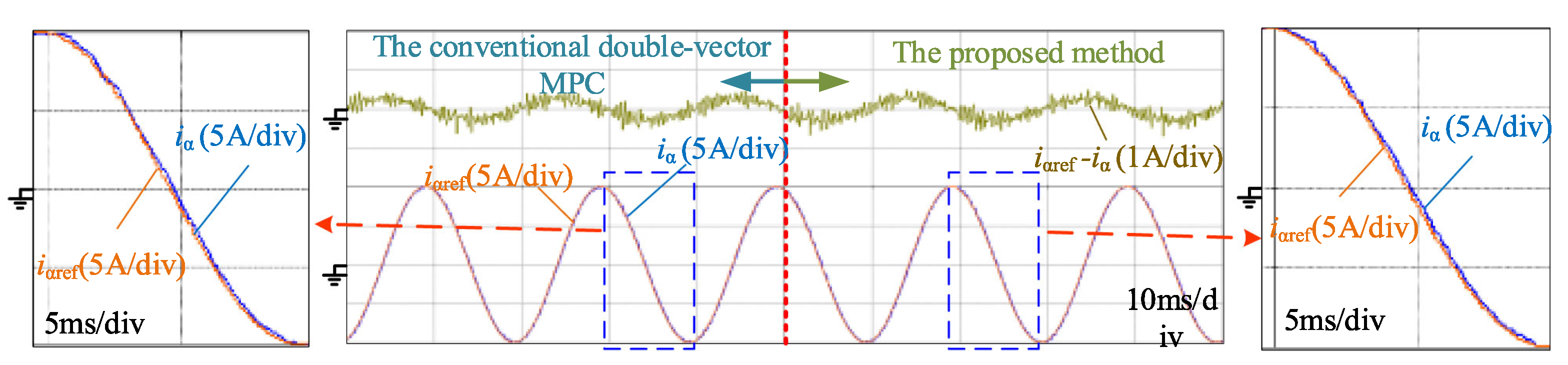
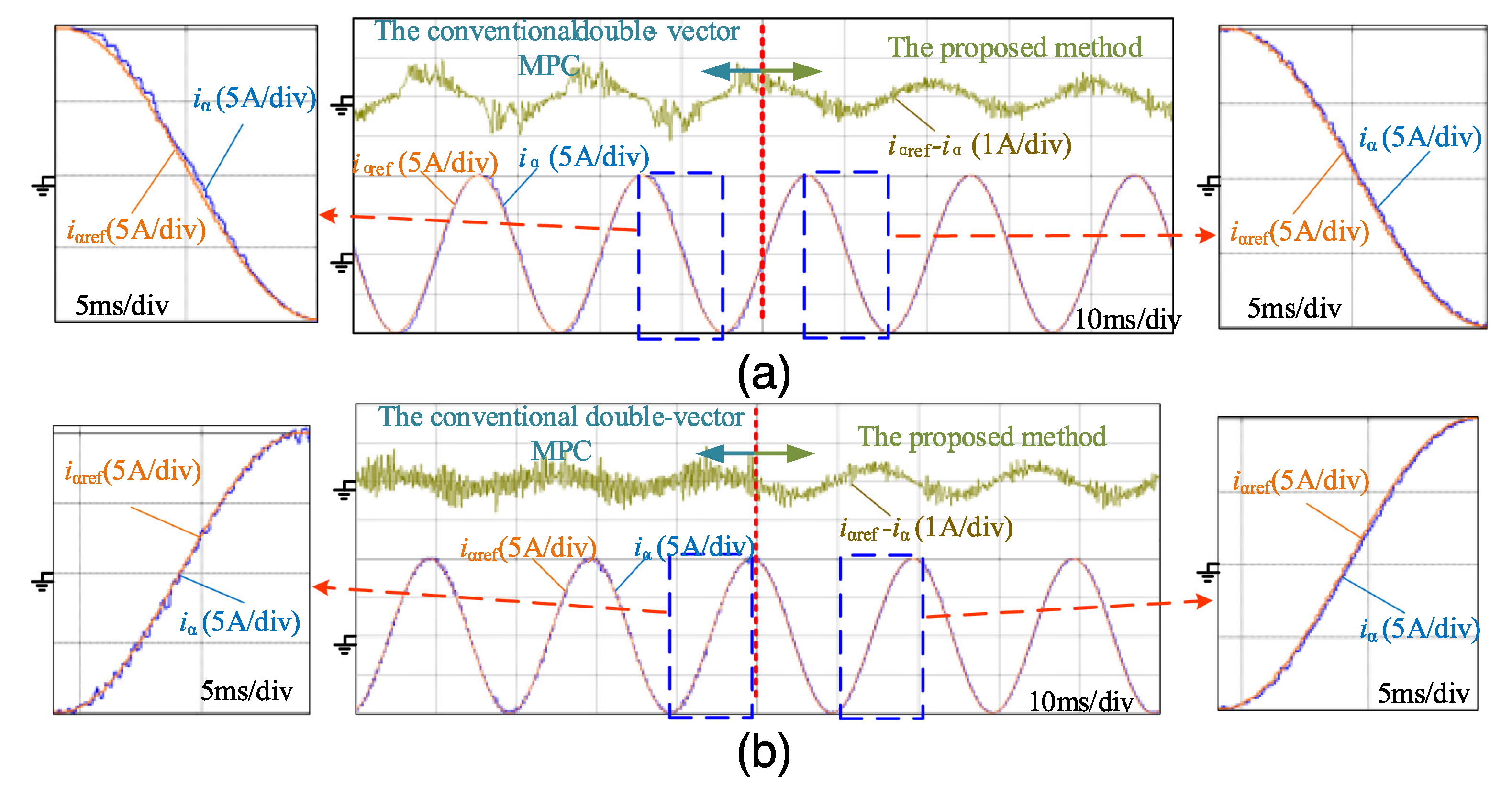
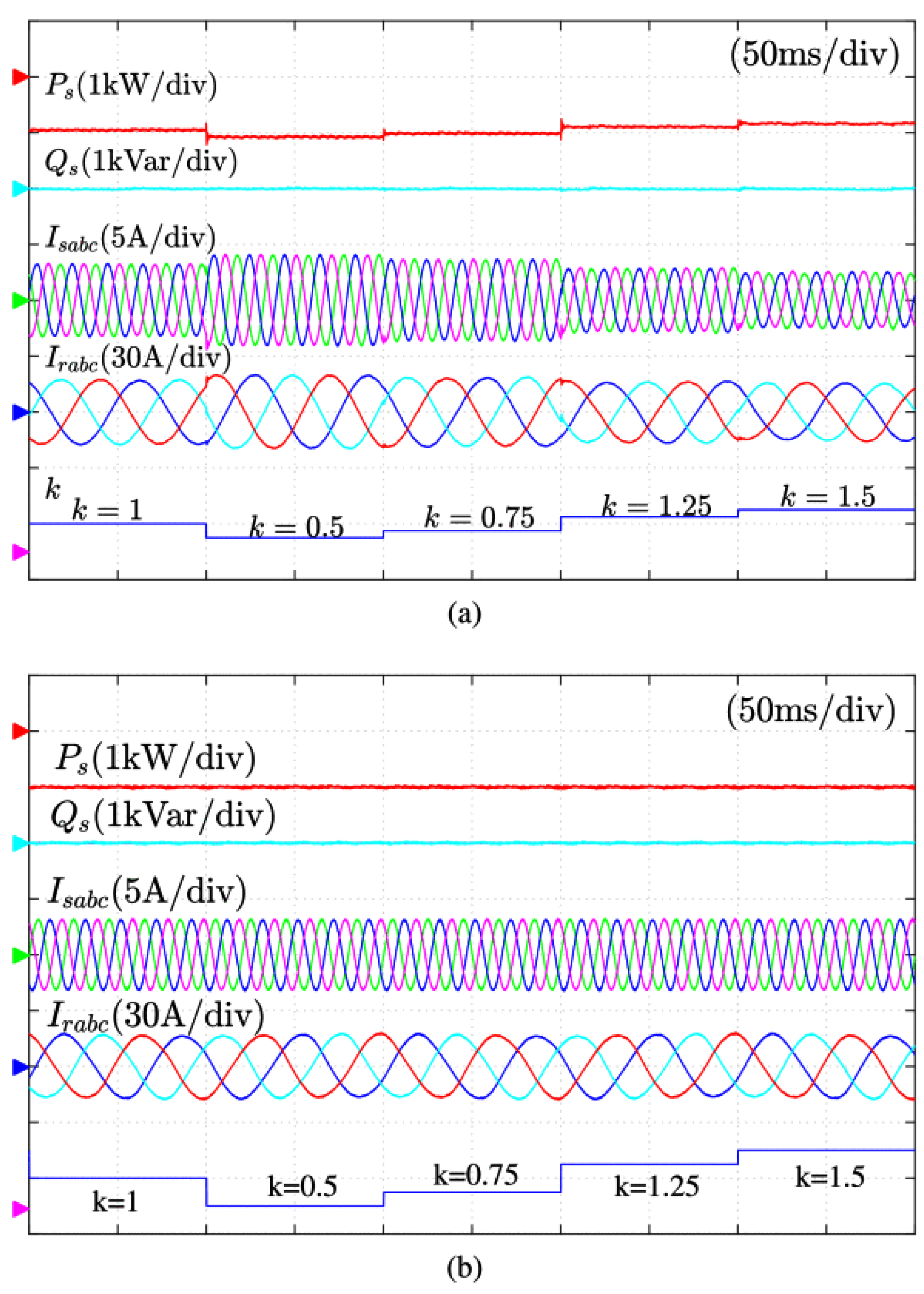
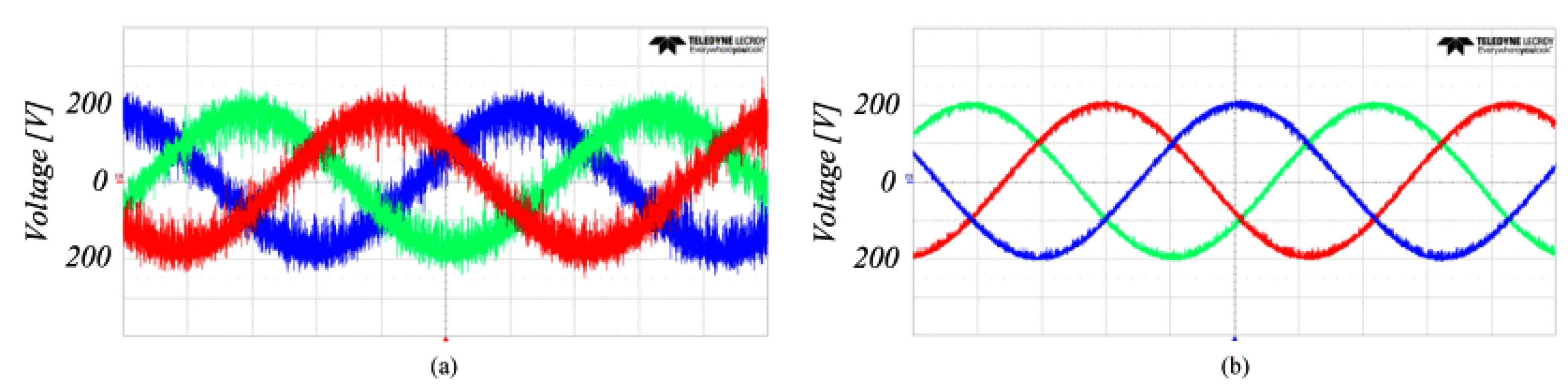
Figure 20.
Comparison of two different predictive control methods. (a) Model-based predictive control (b) Model-free predictive control.
Figure 20.
Comparison of two different predictive control methods. (a) Model-based predictive control (b) Model-free predictive control.
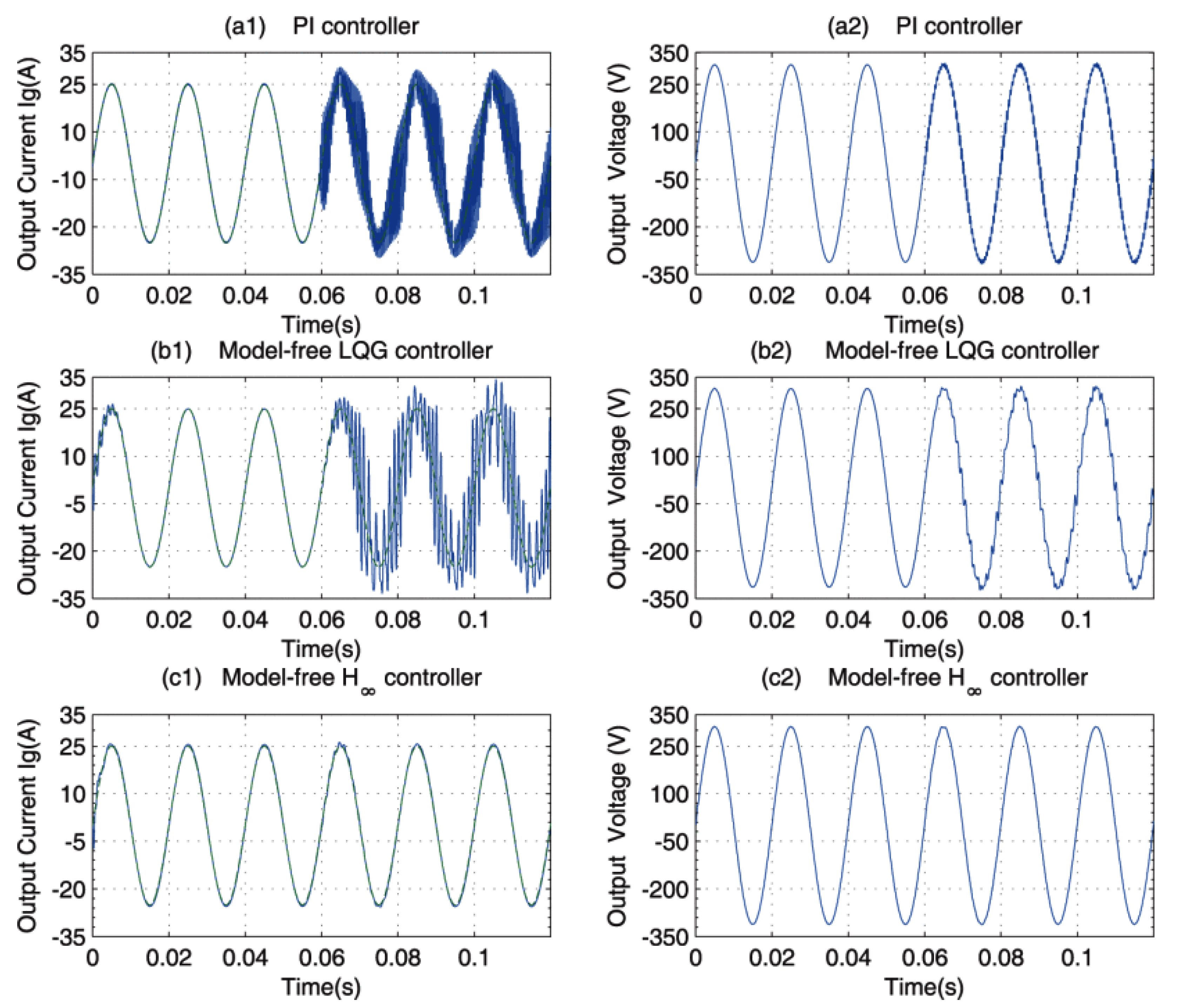
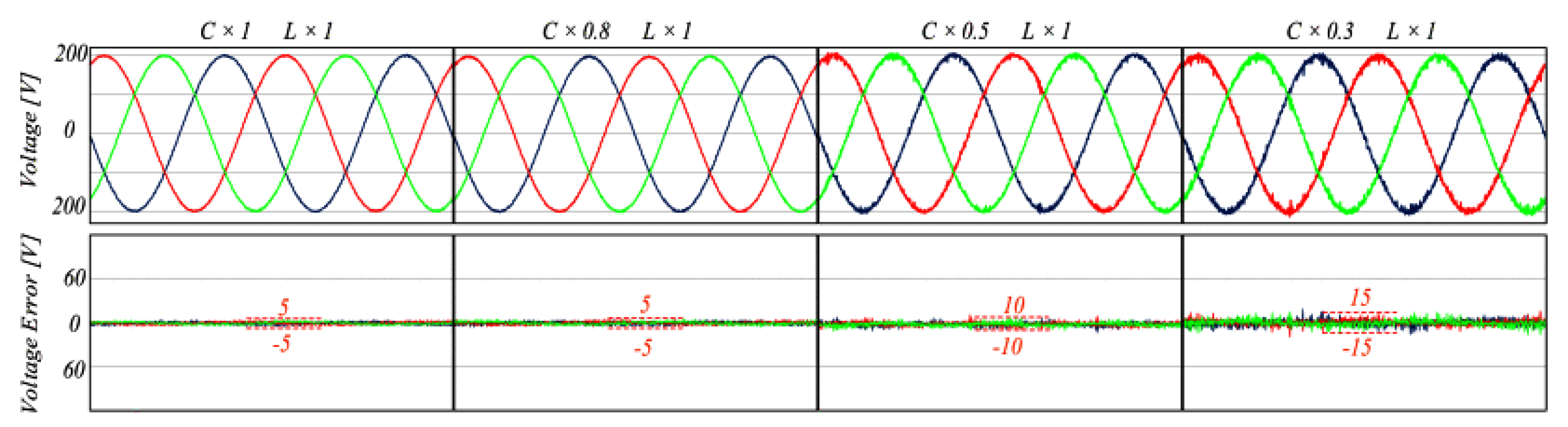
Figure 21.
Performance comparison of different controllers for a change in grid inductance from 0.15 to 0.40 mH. (a1) PI controller current waveform. (a2) PI controller voltage waveform. (b1) Model−free LQG controller current waveform. (b2) Model−free LQG controller voltage waveform. (c1) Model−free current waveform. (c2) Model−free voltage waveform.
Figure 21.
Performance comparison of different controllers for a change in grid inductance from 0.15 to 0.40 mH. (a1) PI controller current waveform. (a2) PI controller voltage waveform. (b1) Model−free LQG controller current waveform. (b2) Model−free LQG controller voltage waveform. (c1) Model−free current waveform. (c2) Model−free voltage waveform.
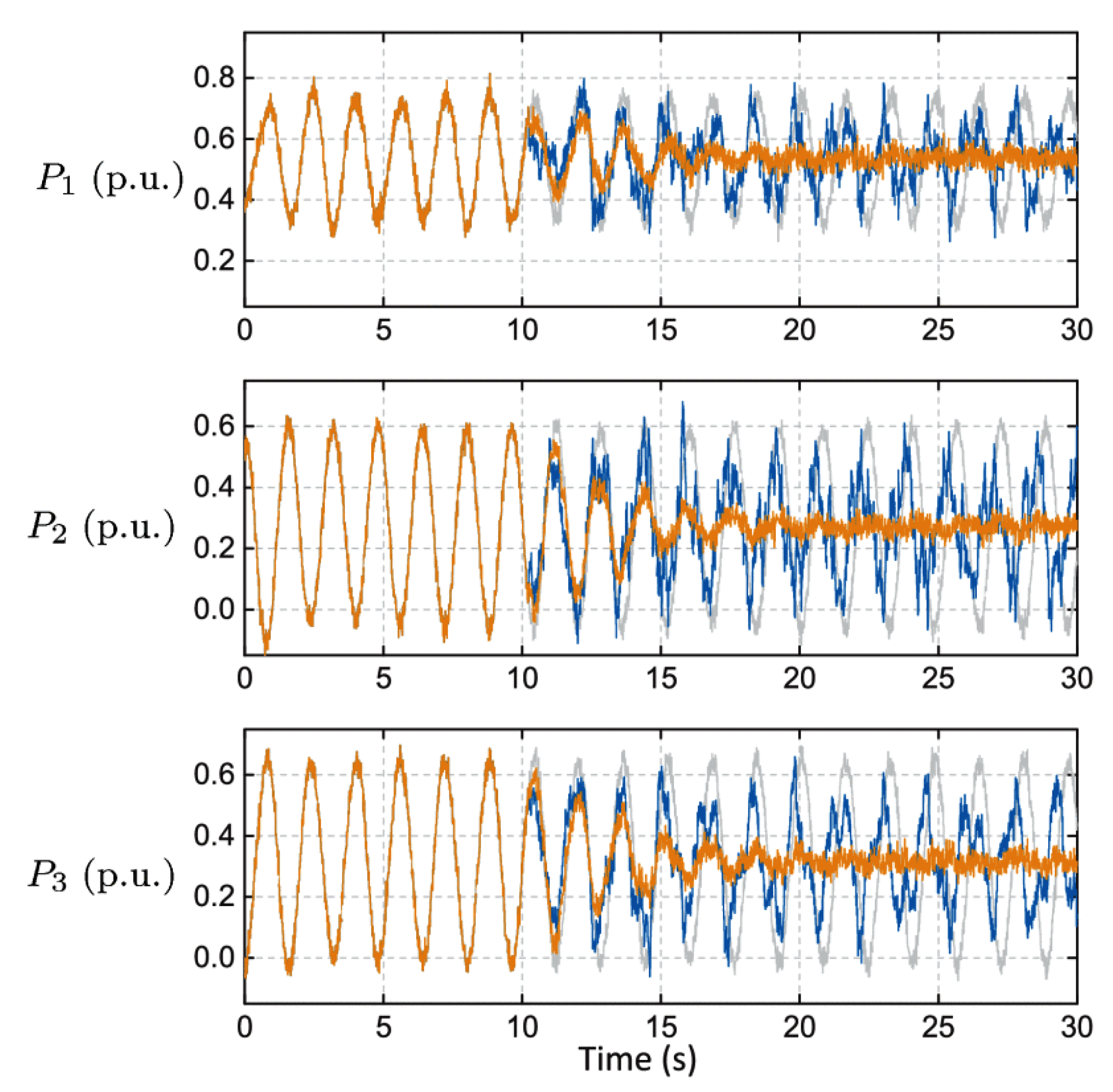
Figure 22.
Comparison of data-driven predictive control and model-based predictive control. Grey color: without control. Blue color: model-based predictive control. Orange color: data-driven predictive control.
Figure 22.
Comparison of data-driven predictive control and model-based predictive control. Grey color: without control. Blue color: model-based predictive control. Orange color: data-driven predictive control.
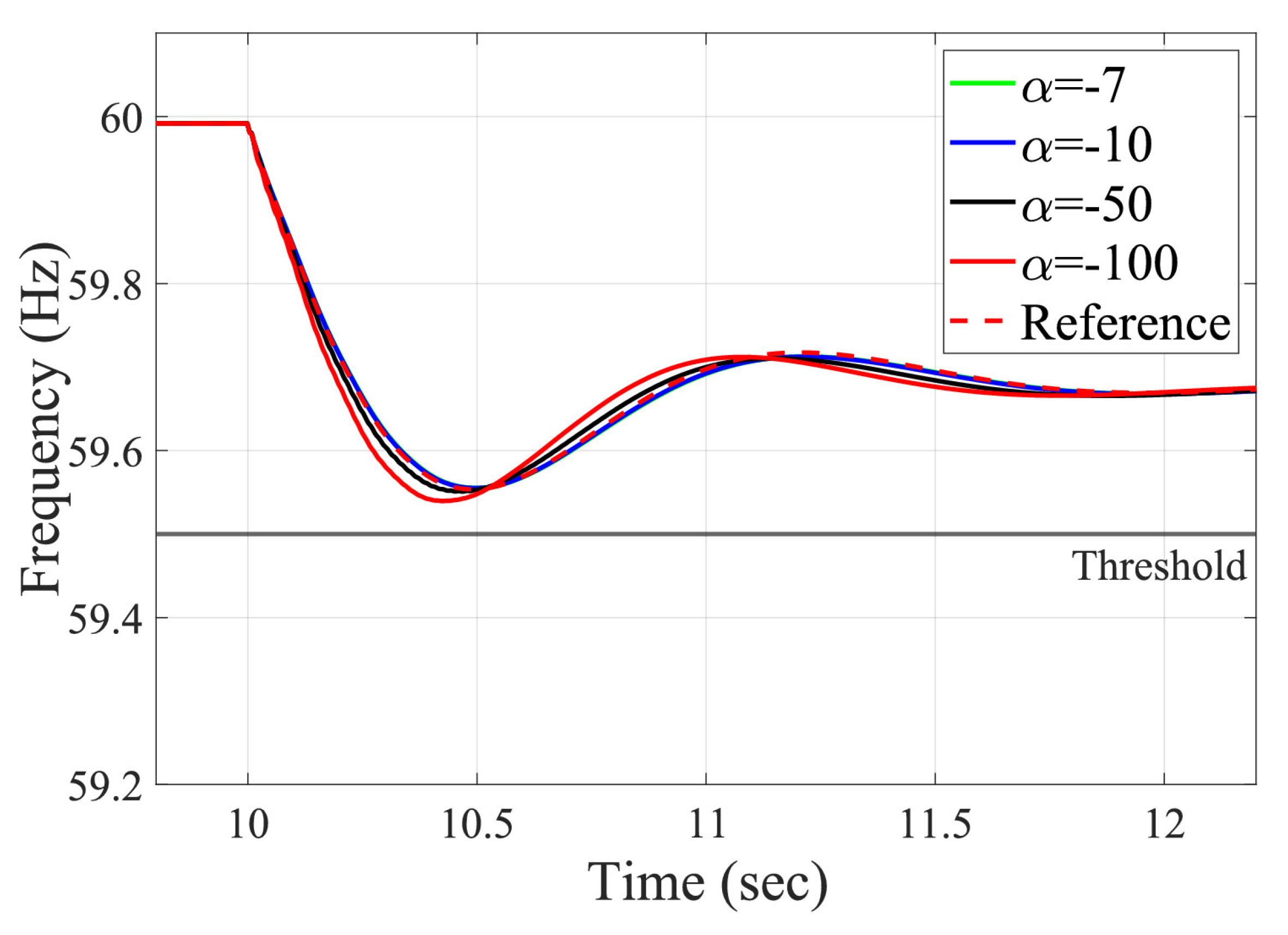
Figure 23.
Frequency response for different values of .
Figure 23.
Frequency response for different values of .
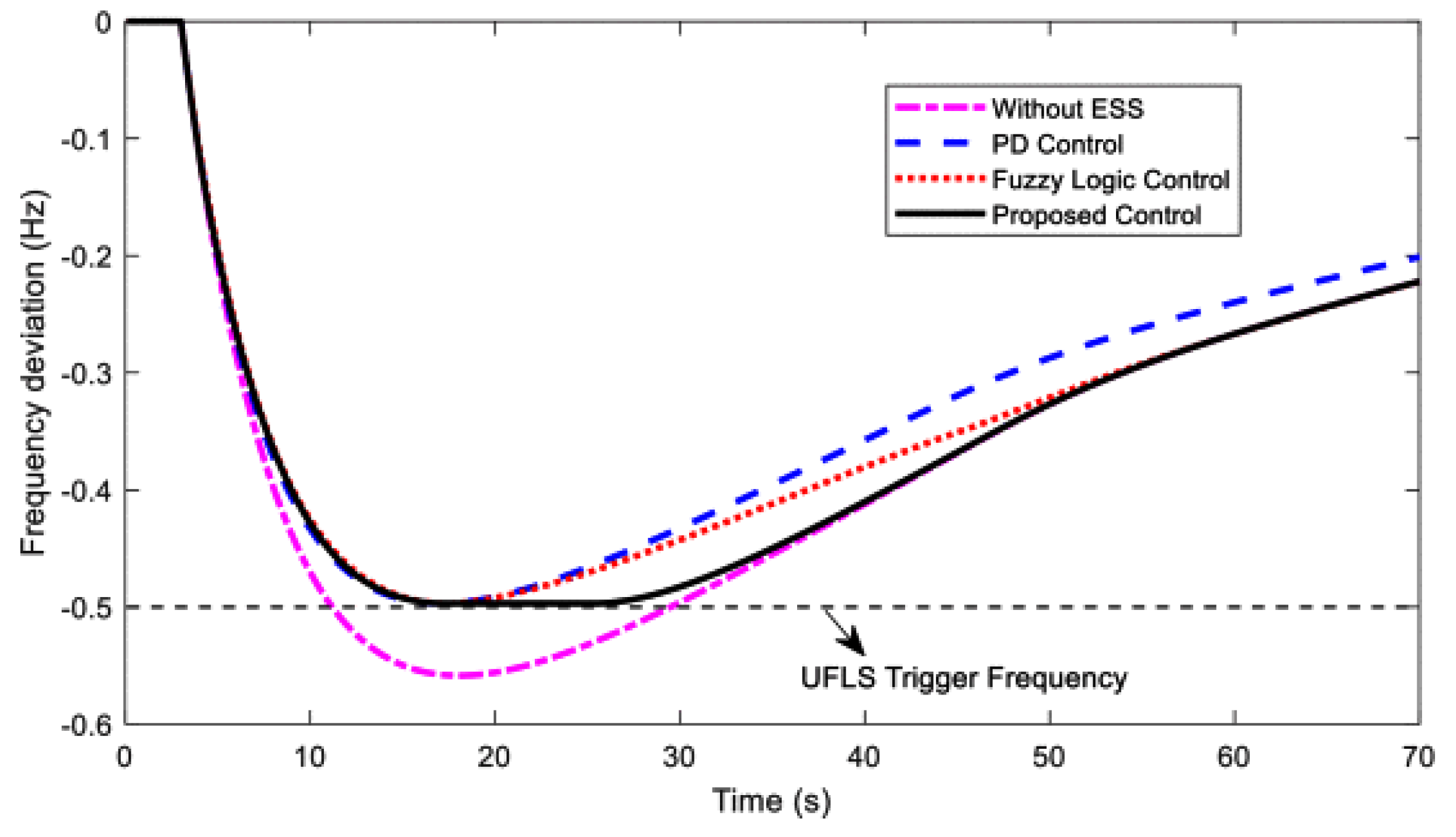
Figure 24.
Frequency deviation with and without ESS.
Figure 24.
Frequency deviation with and without ESS.
Figure 25.
Performance of model-based predictive control.
Figure 25.
Performance of model-based predictive control.
Figure 26.
Performance of model-free predictive control.
Figure 26.
Performance of model-free predictive control.
Figure 27.
Comparison of different controllers with an ideal model. (a) MPC performance. (b) MFPC performancel.
Figure 27.
Comparison of different controllers with an ideal model. (a) MPC performance. (b) MFPC performancel.
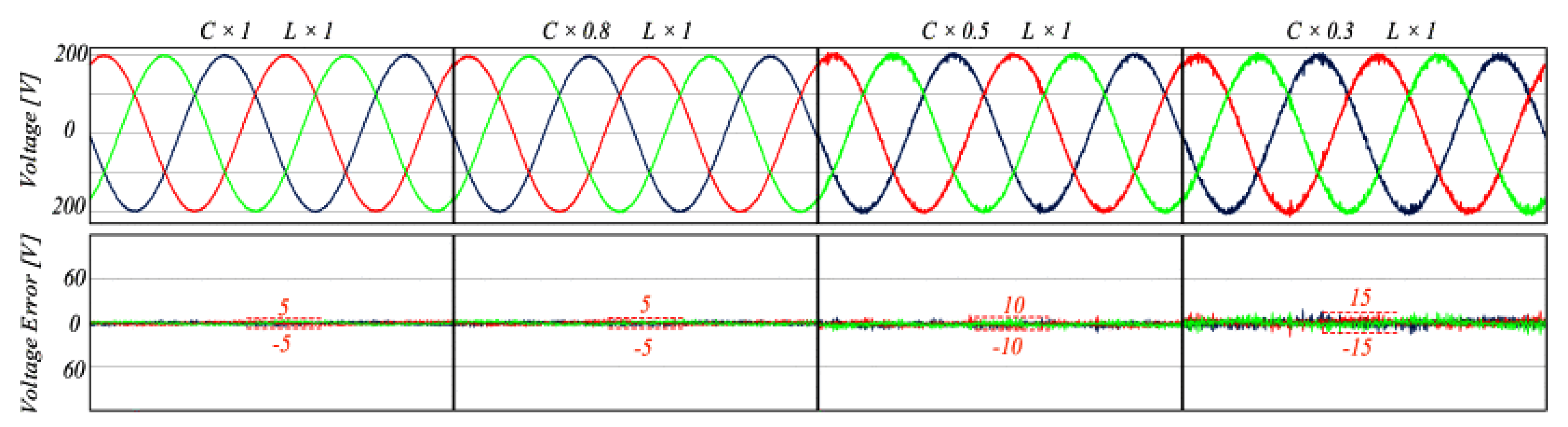
Figure 28.
Comparison of different controllers for a change of 30% in capacitance. (a) MPC performance. (b) MFPC performance.
Figure 28.
Comparison of different controllers for a change of 30% in capacitance. (a) MPC performance. (b) MFPC performance.
Figure 29.
Comparison of the performance of NNPC−VSG and PI control. (a) Active power. (b) Reactive power. (c) Zoomed active power. (d) Zoomed reactive power.
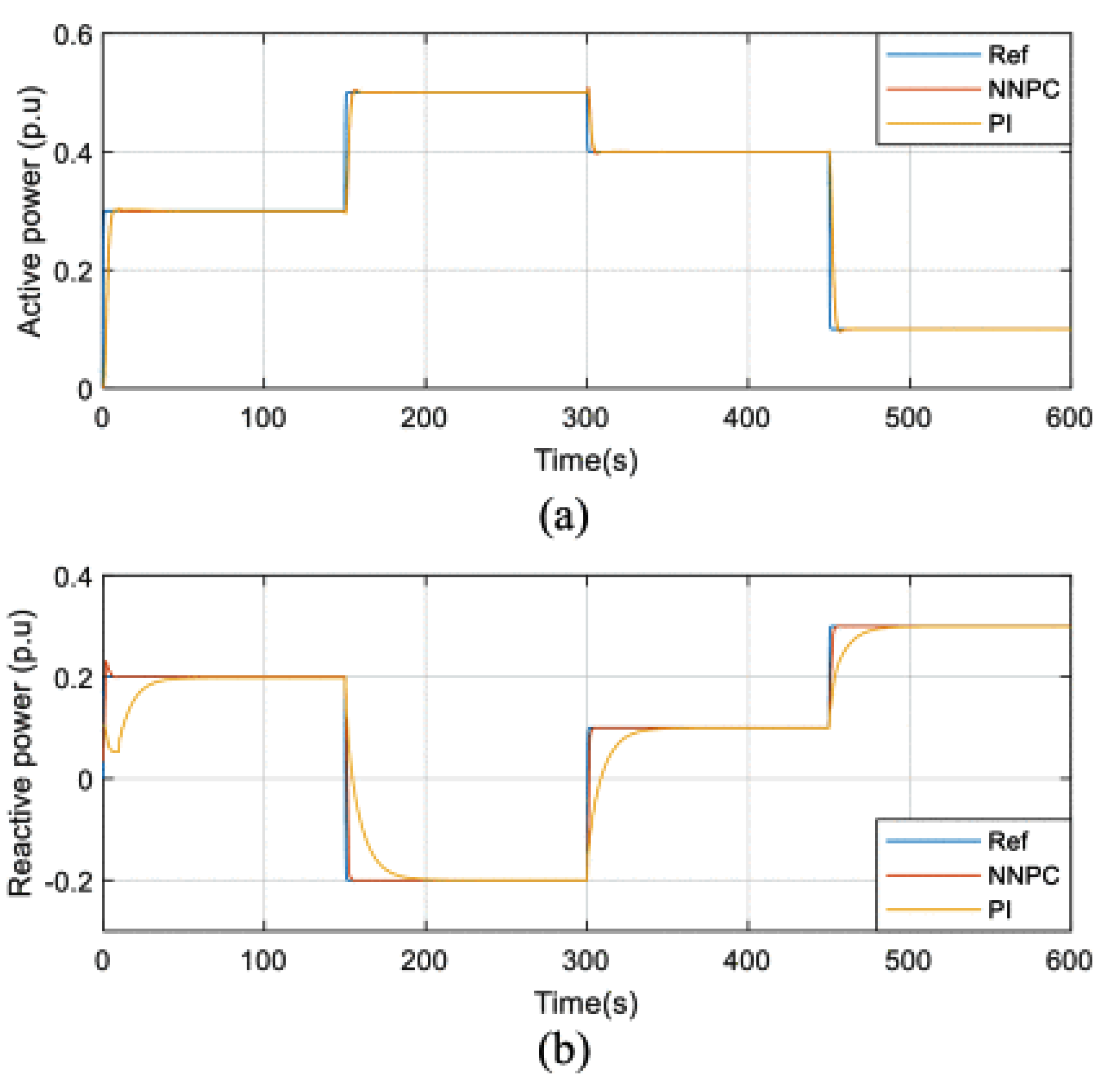
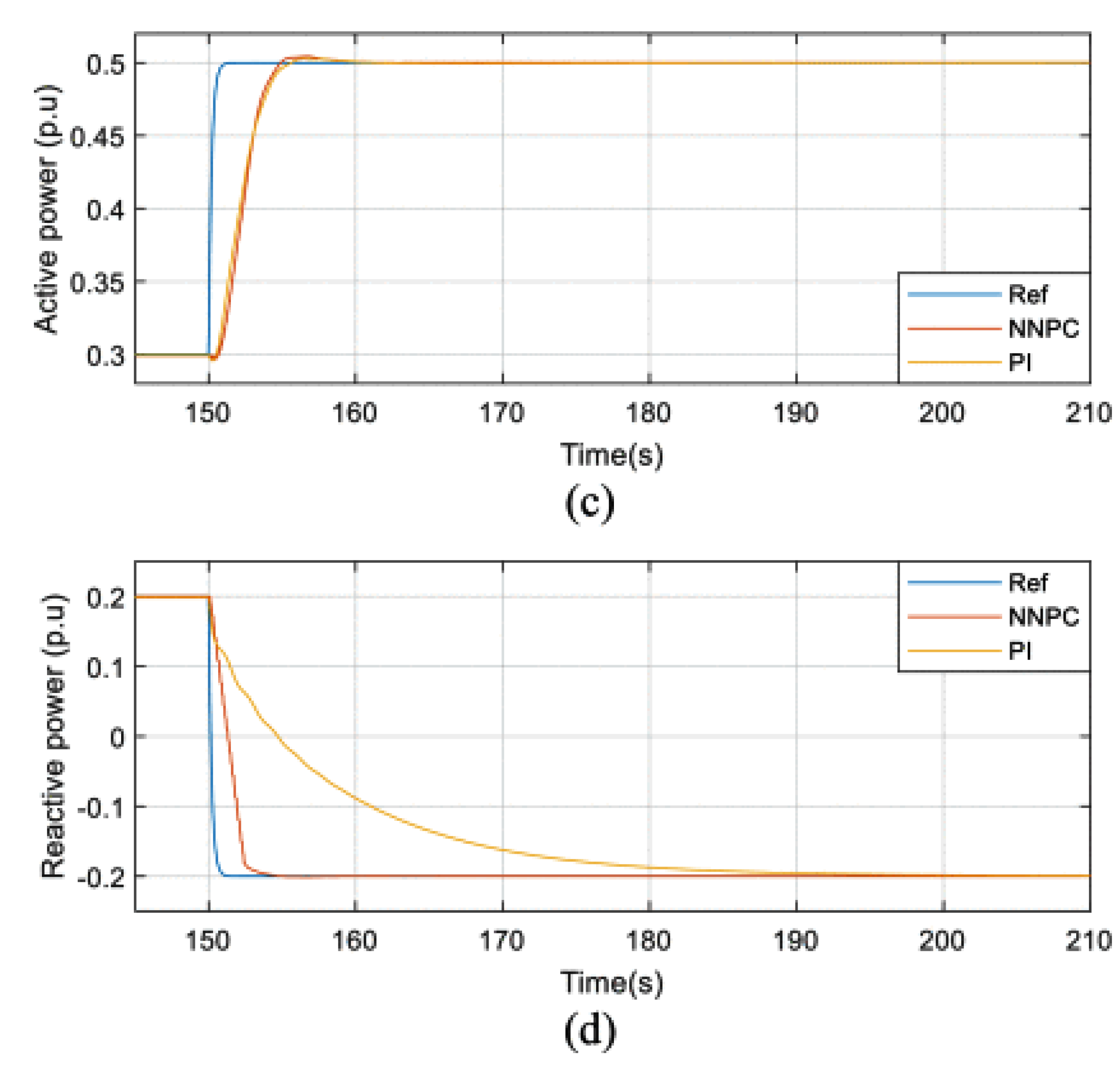
Figure 29.
Comparison of the performance of NNPC−VSG and PI control. (a) Active power. (b) Reactive power. (c) Zoomed active power. (d) Zoomed reactive power.
Table 1.
Research papers on the application of model-free predictive control in power converters.
Table 1.
Research papers on the application of model-free predictive control in power converters.
| MFPC for Power Converters | Reference |
|---|
| Model-free predictive control for current regulation of a three-phase inverter | [18] |
| Model-free neural-network-based predictive controller for a three-phase inverter | [19] |
| Cascaded model-free predictive control for a boost converter | [20] |
| Model-free predictive control for pulse width modulation rectifiers | [21] |
| Double-vector model-free predictive control for a voltage source inverter | [23] |
Table 2.
Comparison of proposed approach with different methods.
Table 2.
Comparison of proposed approach with different methods.
| Method | Nm | (A) | (A) | THD % | KHz |
|---|
| MBPCC | 0.277 | 0.282 | 0.162 | 7.53 | 2.81 |
| MBPCC with 0.5 | 0.409 | 0.332 | 0.246 | 7.76 | 2.87 |
| MBPCC with 0.5 | 0.267 | 0.415 | 0.137 | 7.46 | 2.78 |
| Conventional MFPCC | 0.690 | 0.438 | 0.390 | 9.83 | 2.93 |
| Proposed MFPCC | 0.223 | 0.293 | 0.132 | 7.27 | 2.89 |
Table 3.
Research papers on the application of model-free predictive control in electric drives.
Table 3.
Research papers on the application of model-free predictive control in electric drives.
| MFPC for Electric Drives | Reference |
|---|
| Ultra-local-model-based model-free predictive current control for a surface mounted permanent magnet synchronous motor | [22] |
| Dead-beat-based model-free predictive current control for a permanent motor synchronous drive | [24] |
| Ultra-local-model-based model-free predictive control for a synchronous motor | [25] |
| Lookup-table-based model-free predictive control for a synchronous reluctance motor drive | [26] |
| Model-free predictive current control for a permanent magnet synchronous motor | [27] |
Table 4.
Research papers on application of model-free predictive control in power systems.
Table 4.
Research papers on application of model-free predictive control in power systems.
| MFPC for Power Systems | Reference |
|---|
| Model-free predictive control for a doubly fed induction generator | [28] |
| -based model-free predictive control for a grid-connected solar power generation system | [29] |
| Data-based predictive control for power system oscillation damping | [30] |
| Data-based model-free predictive control for removing oscillation in a grid-connected inverter | [31] |
Table 5.
Research papers on the application of model-free predictive control in microgrids.
Table 5.
Research papers on the application of model-free predictive control in microgrids.
| MFPC for Microgrids | Reference |
|---|
| Model-free predictive control for frequency synchronization of a microgrid | [32] |
| Model-free predictive control for fast frequency synchronization of a microgrid using a battery energy storage system | [33] |
| Model-free predictive control of grid-forming inverters with an LCL filter | [34] |
| Model-free neural-network-based predictive controller for frequency and voltage regulation of synchronverters | [35] |
Table 6.
Hierarchical control layer functions and their response time.
Table 6.
Hierarchical control layer functions and their response time.
| Layer | Function | Time Response |
|---|
| Primary | Voltage control Frequency control
| Fast |
| Secondary | Elimination of frequency deviation Reference signal generation for primary layer Grid-connected to island mode Island to grid-connected mode
| Slow |
| Tertiary | Coordination of different microgrids | Slow |
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}