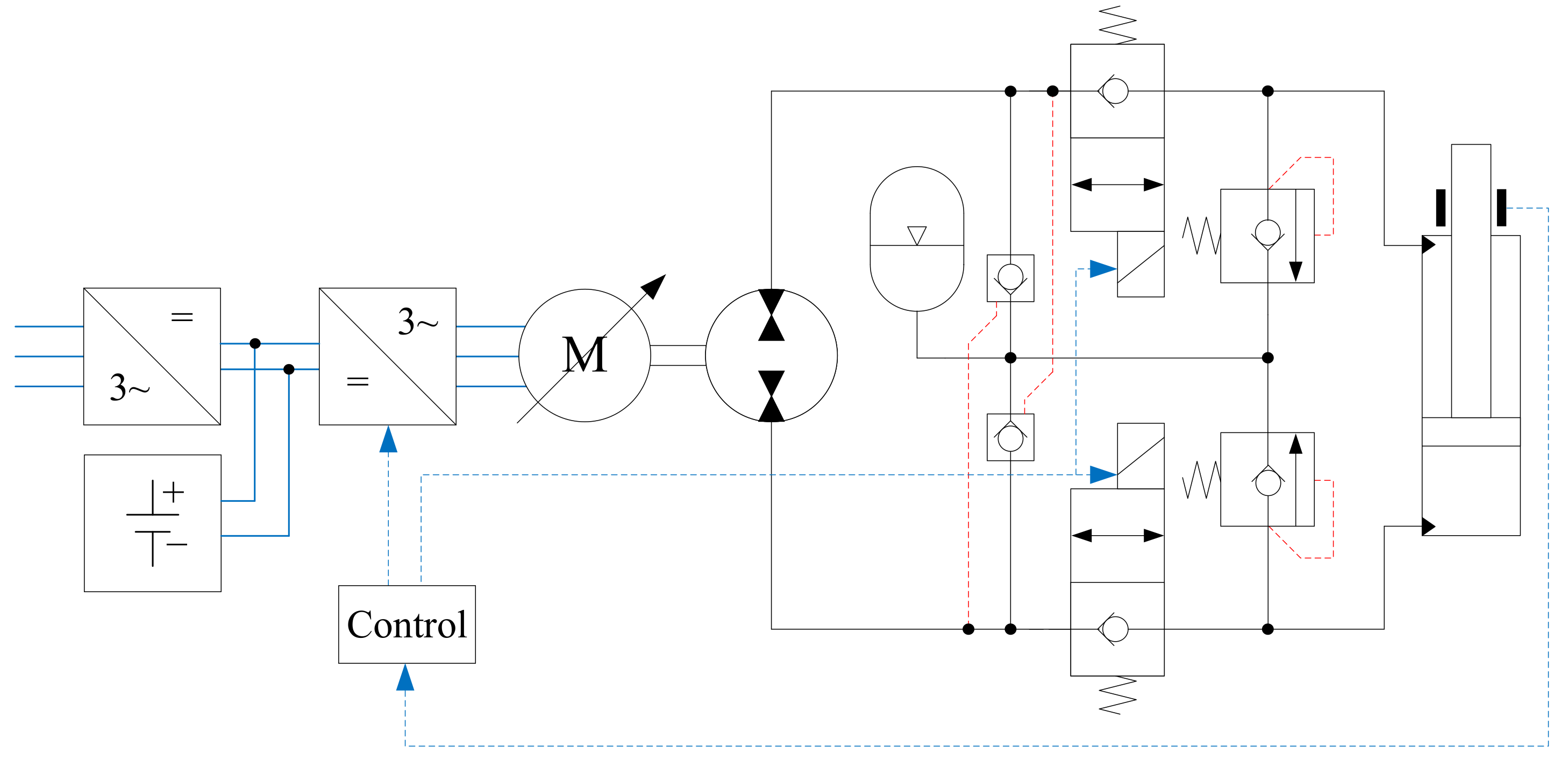
Figure 1.
Proposed concept for the EHA.
Figure 1.
Proposed concept for the EHA.
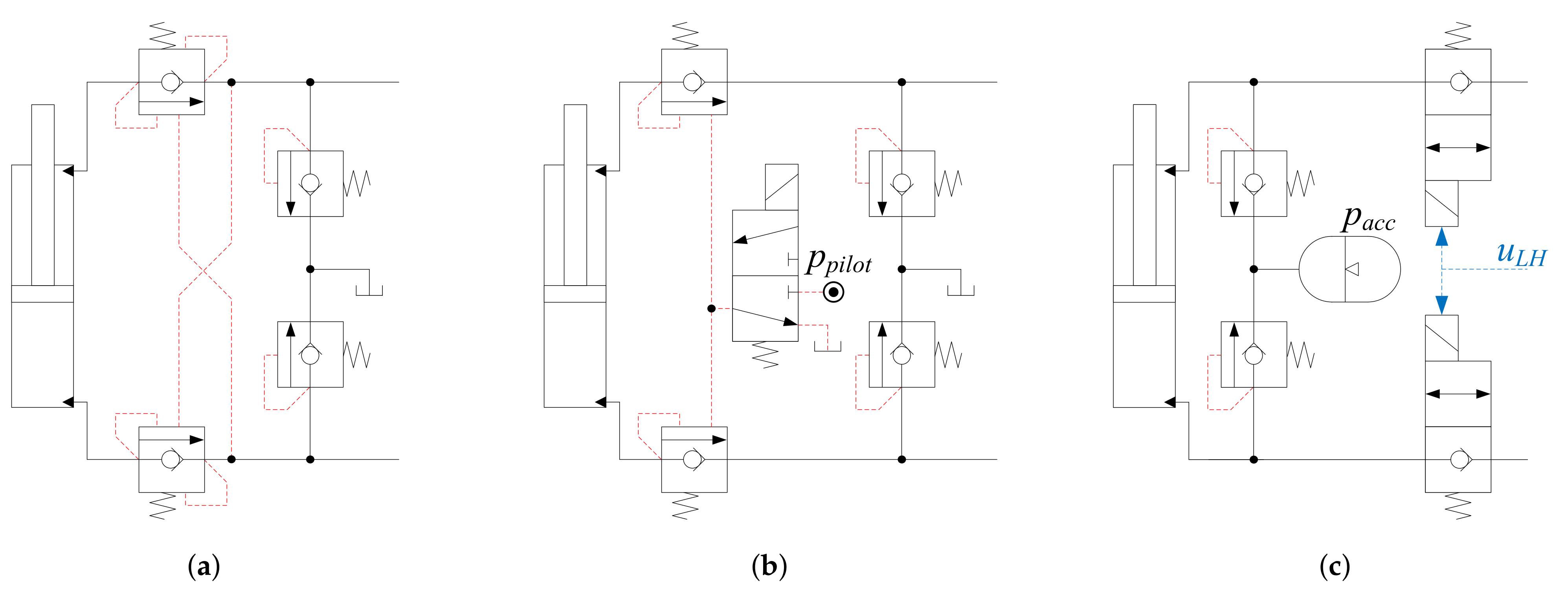
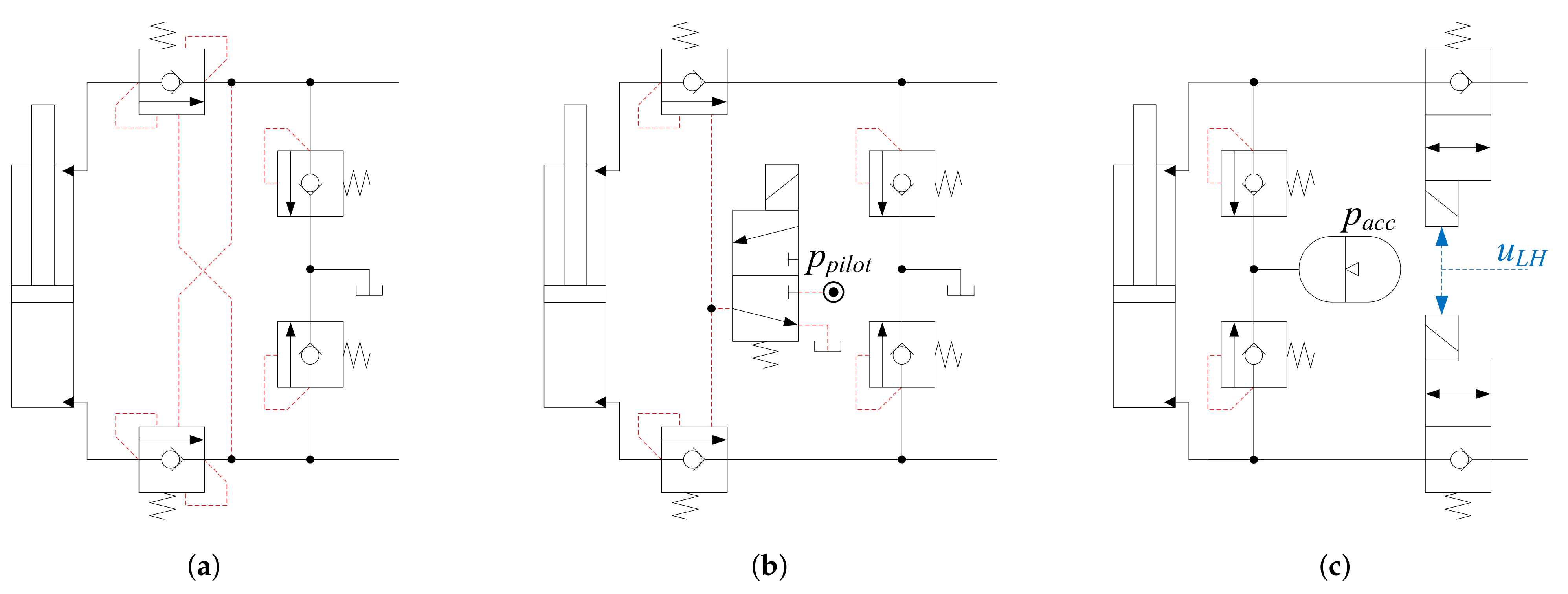
Figure 2.
Examples of topologies for load holding and overload handling. (a) Traditional counterbalance valves and shock valves for a single rod cylinder; (b) Counterbalance valves opened by 3/2-valve and external pilot pressure; (c) Load holding design for EHA. Counterbalance valves are used in (a, b), while (c) uses poppet valves.
Figure 2.
Examples of topologies for load holding and overload handling. (a) Traditional counterbalance valves and shock valves for a single rod cylinder; (b) Counterbalance valves opened by 3/2-valve and external pilot pressure; (c) Load holding design for EHA. Counterbalance valves are used in (a, b), while (c) uses poppet valves.
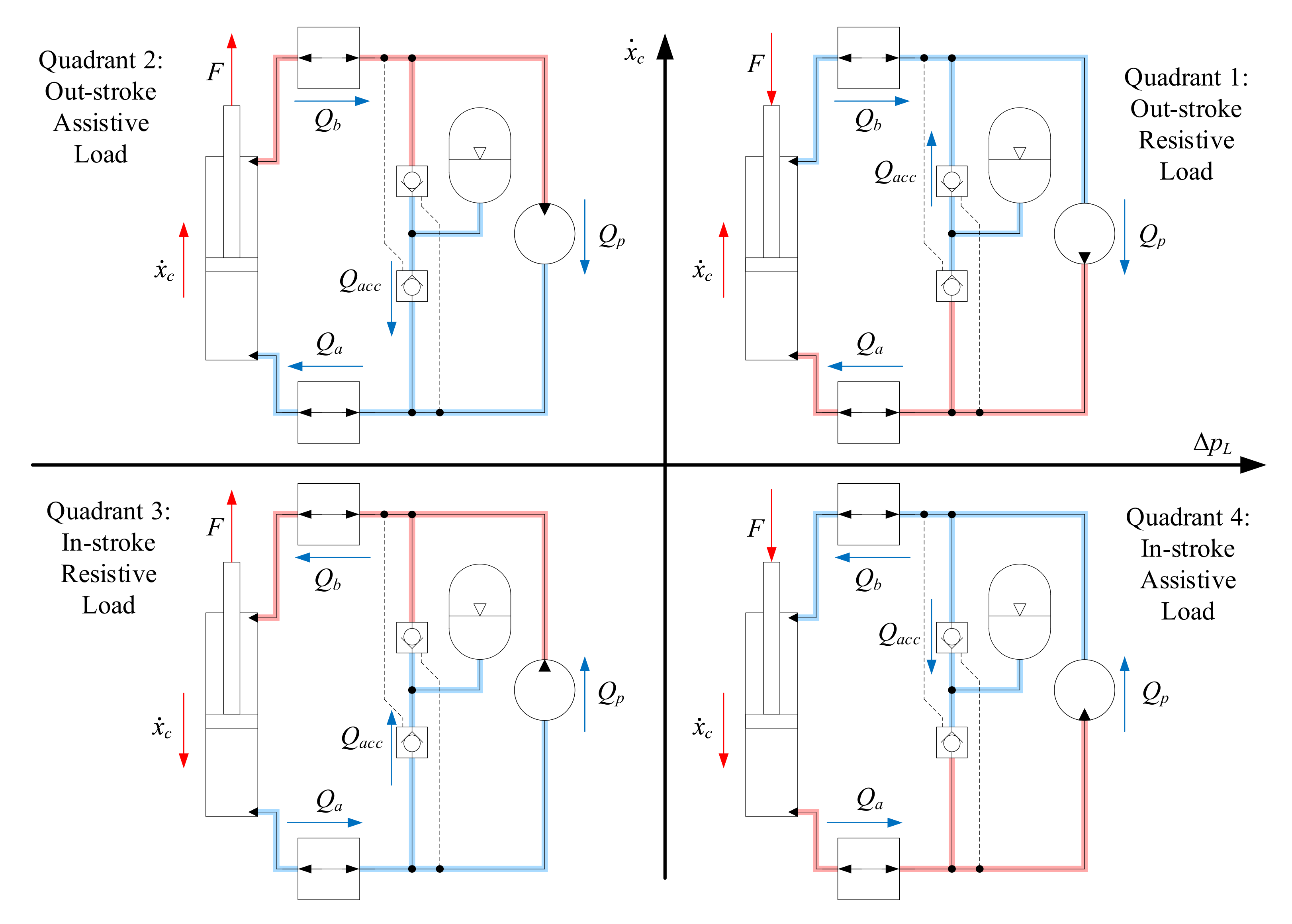
Figure 3.
Four-quadrant operation of the simplified circuit with load holding valves energized.
Figure 3.
Four-quadrant operation of the simplified circuit with load holding valves energized.
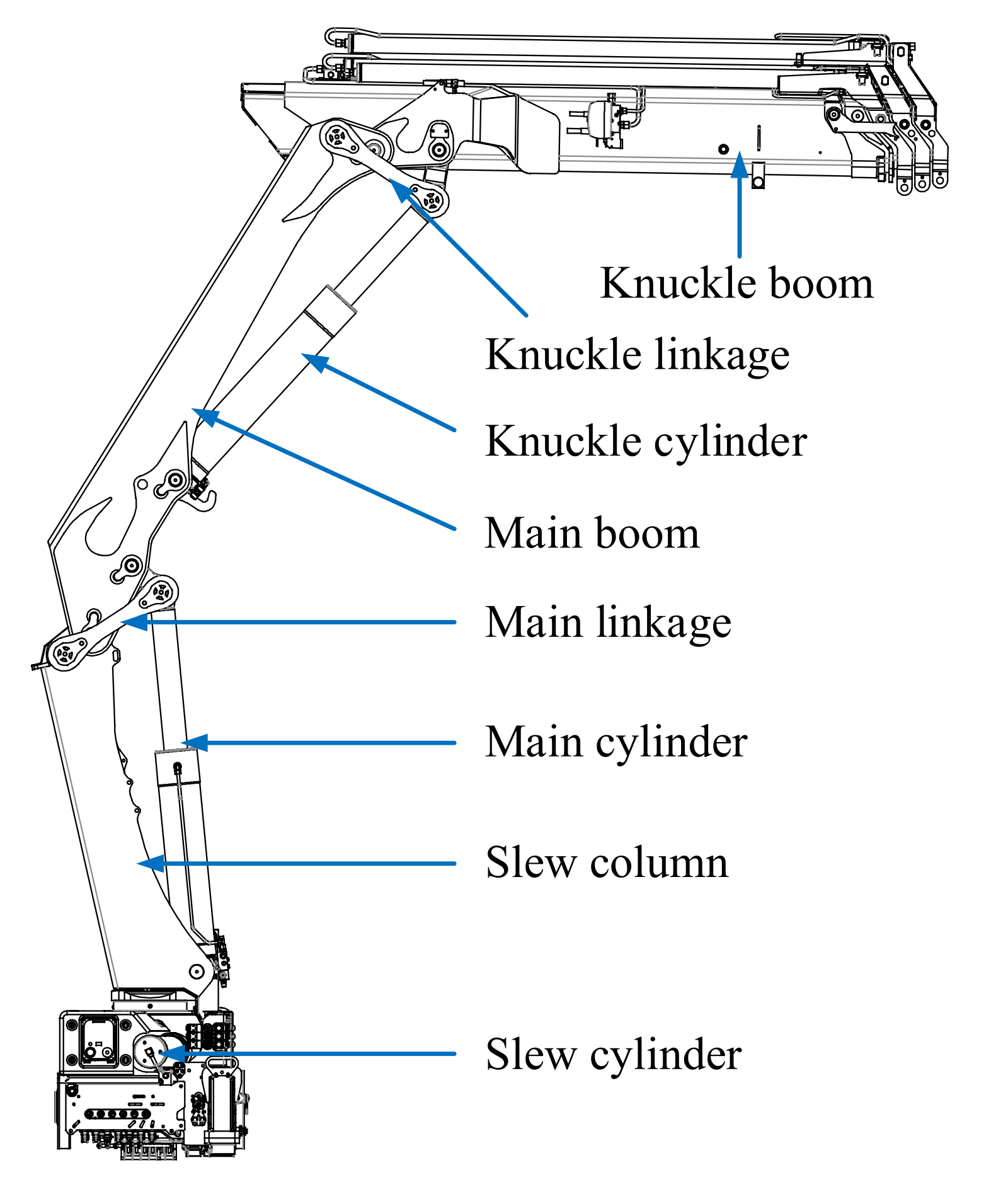
Figure 4.
Illustration of the HMF 2020K4 loader crane.
Figure 4.
Illustration of the HMF 2020K4 loader crane.
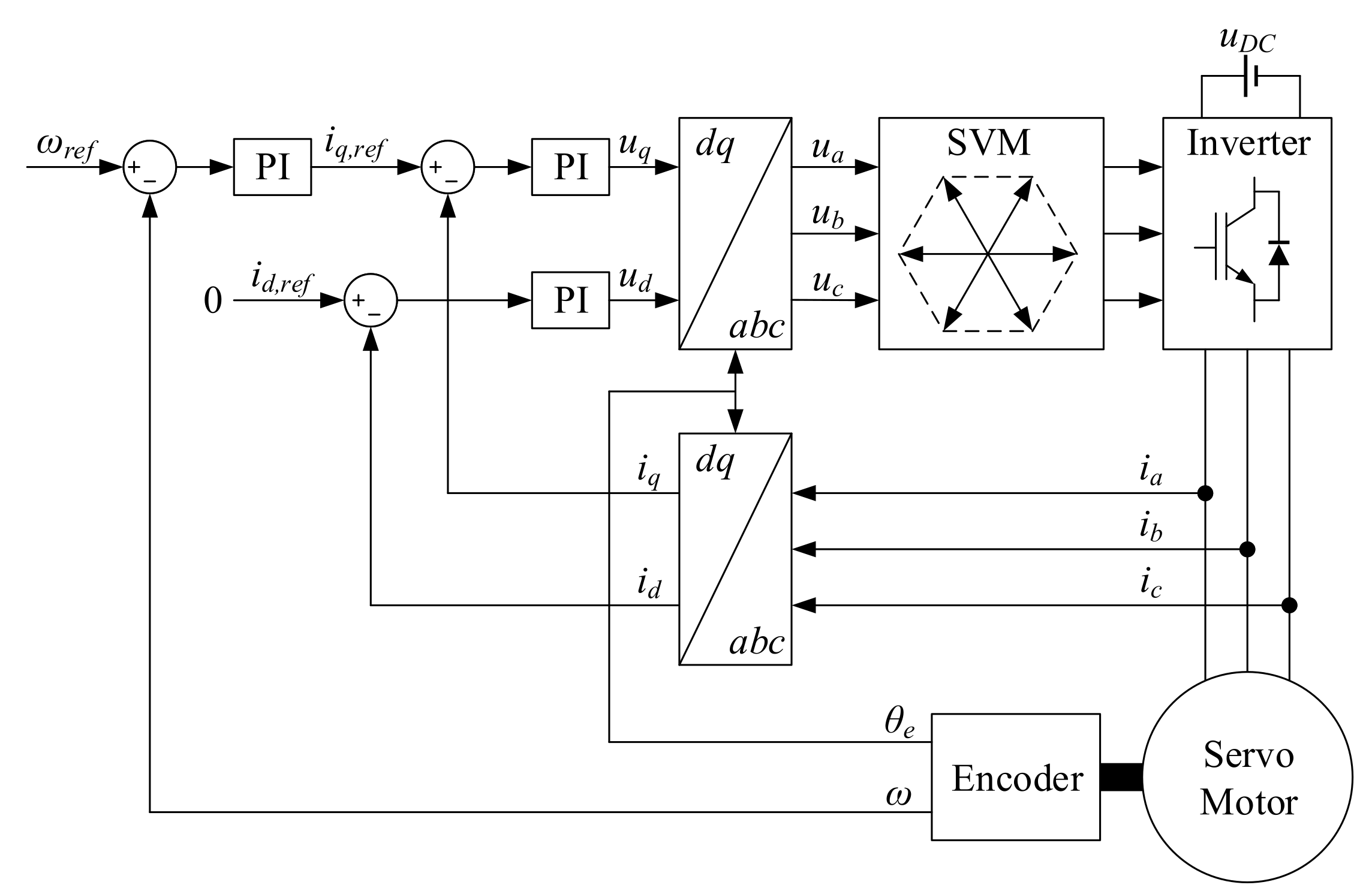
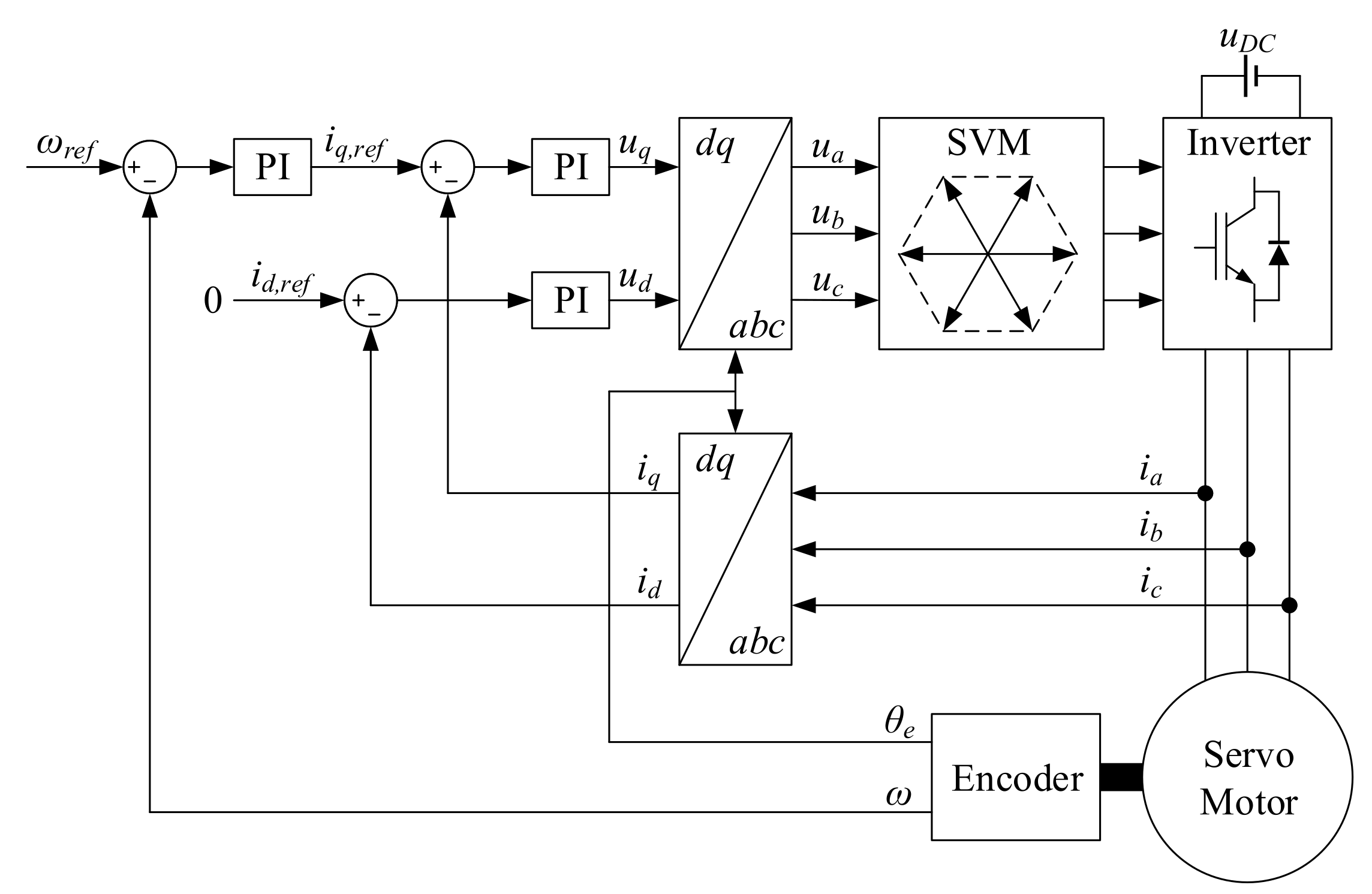
Figure 5.
Illustration of the servo drive using FOC.
Figure 5.
Illustration of the servo drive using FOC.
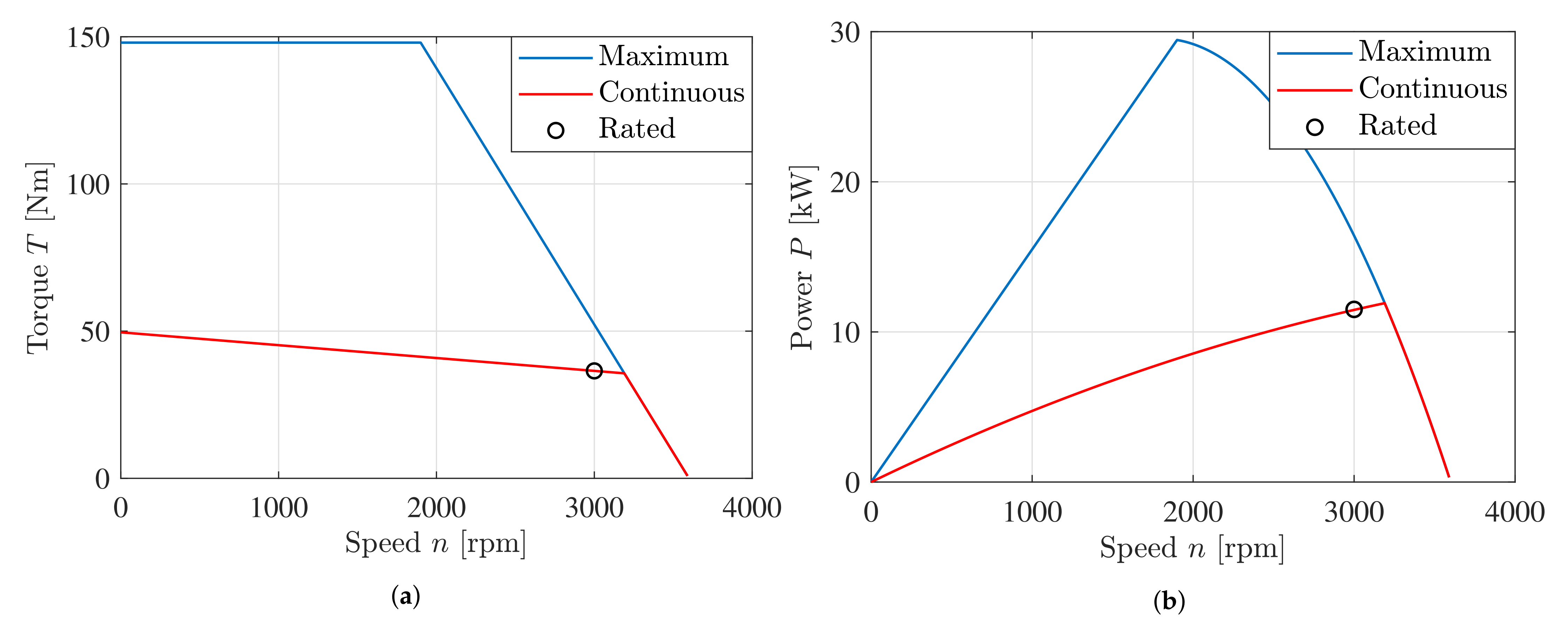
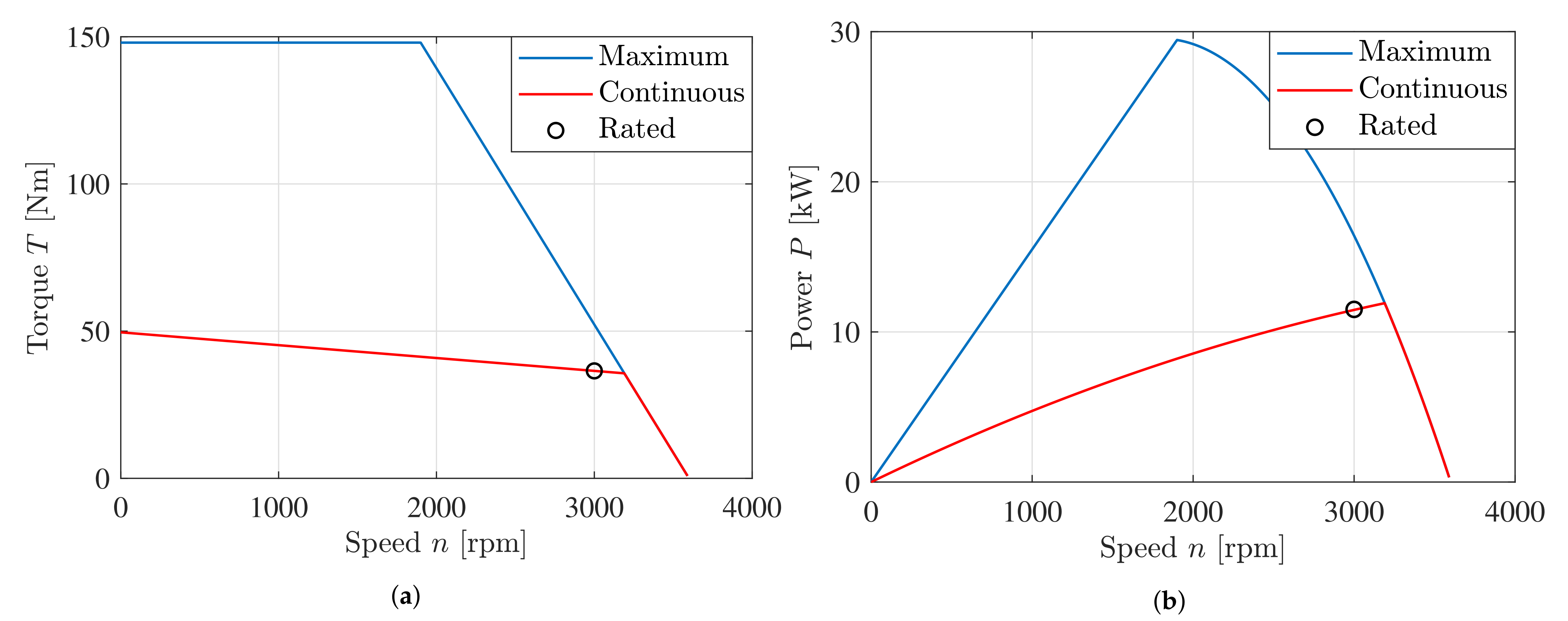
Figure 6.
Torque and power curves for the selected motor with maximum, continuous, and rated operation. (a) Speed-torque curve; (b) Speed-power curve.
Figure 6.
Torque and power curves for the selected motor with maximum, continuous, and rated operation. (a) Speed-torque curve; (b) Speed-power curve.
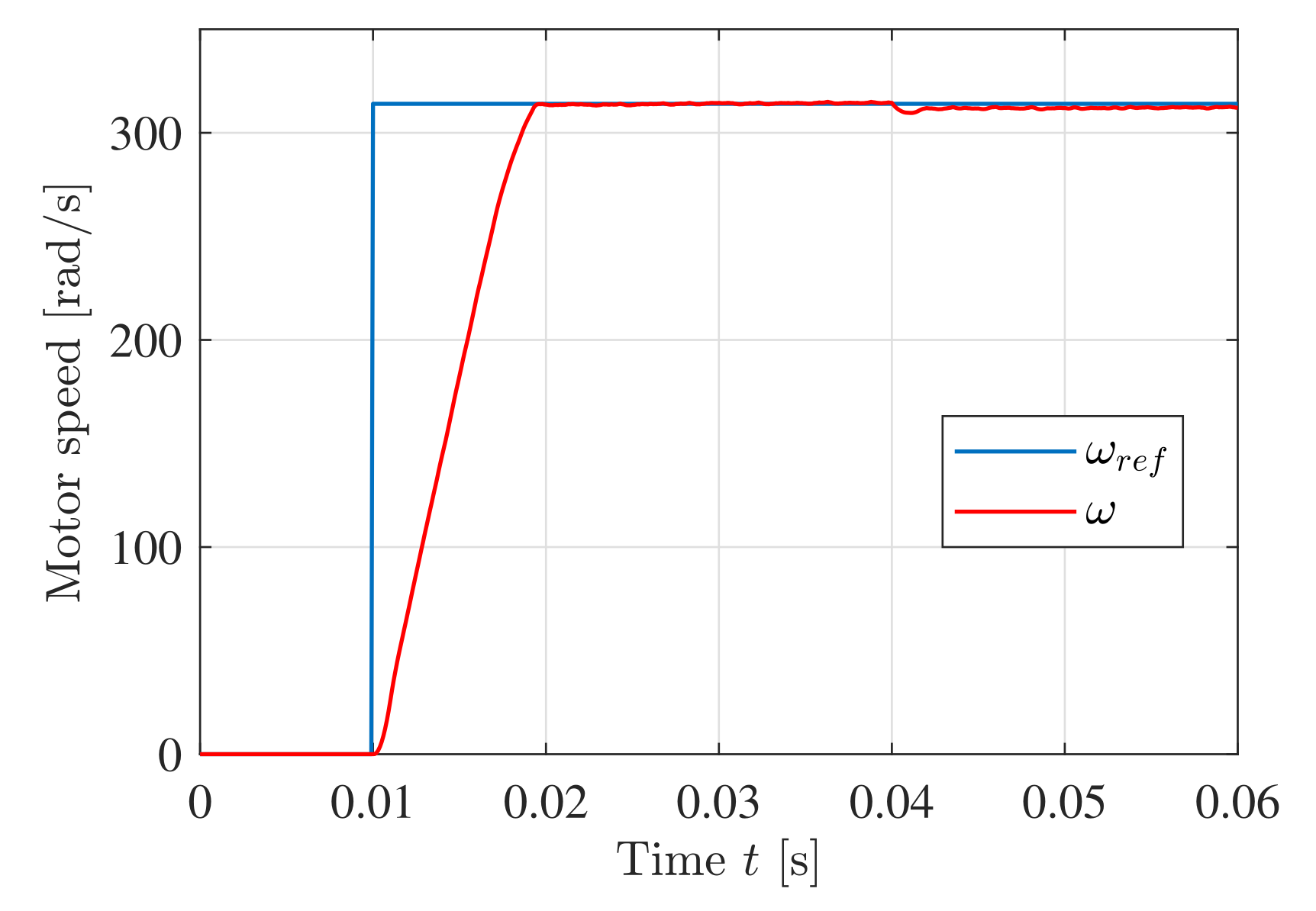
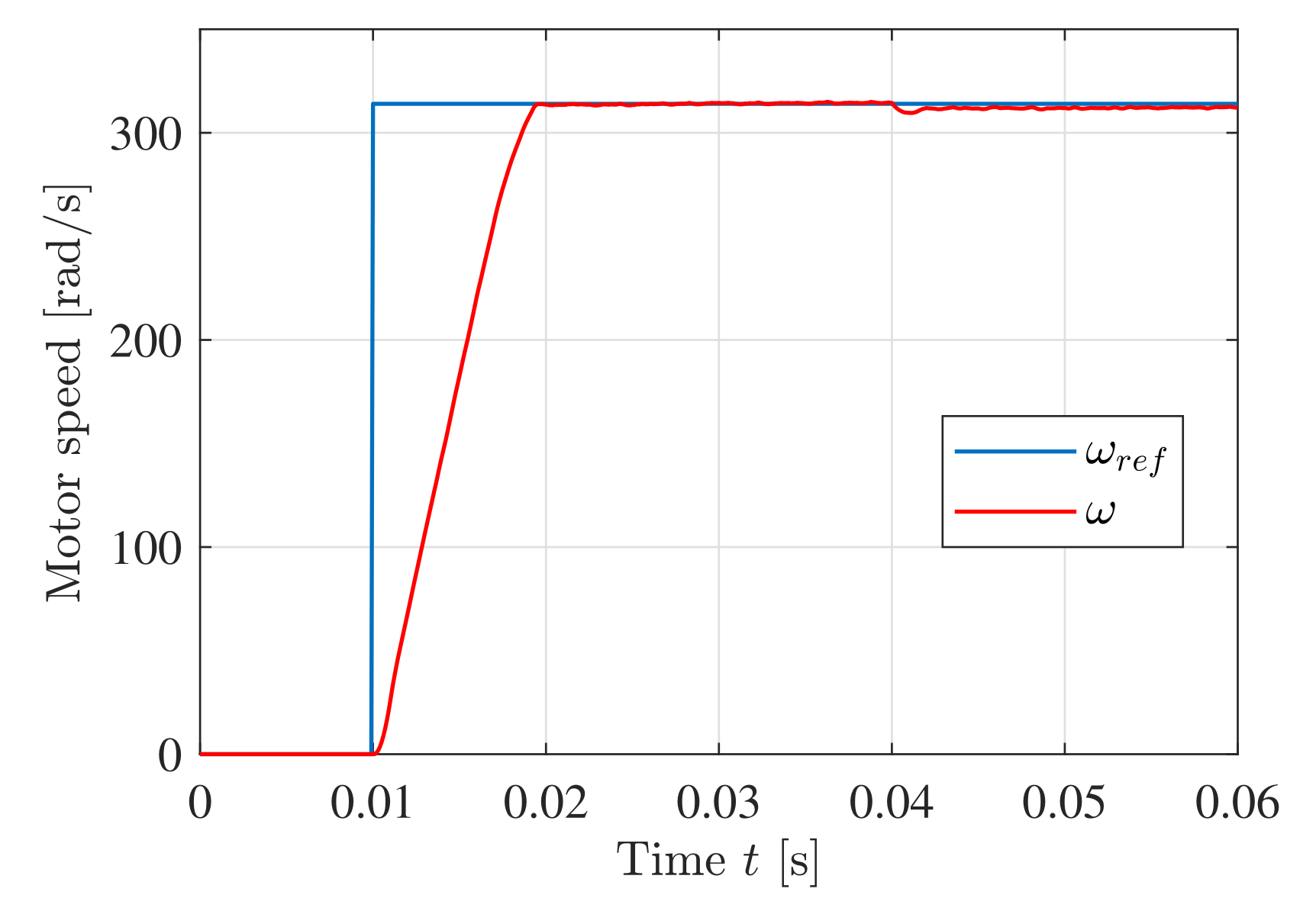
Figure 7.
Servomotor closed loop dynamic response using FOC. Rated speed step at s and rated load step at s.
Figure 7.
Servomotor closed loop dynamic response using FOC. Rated speed step at s and rated load step at s.
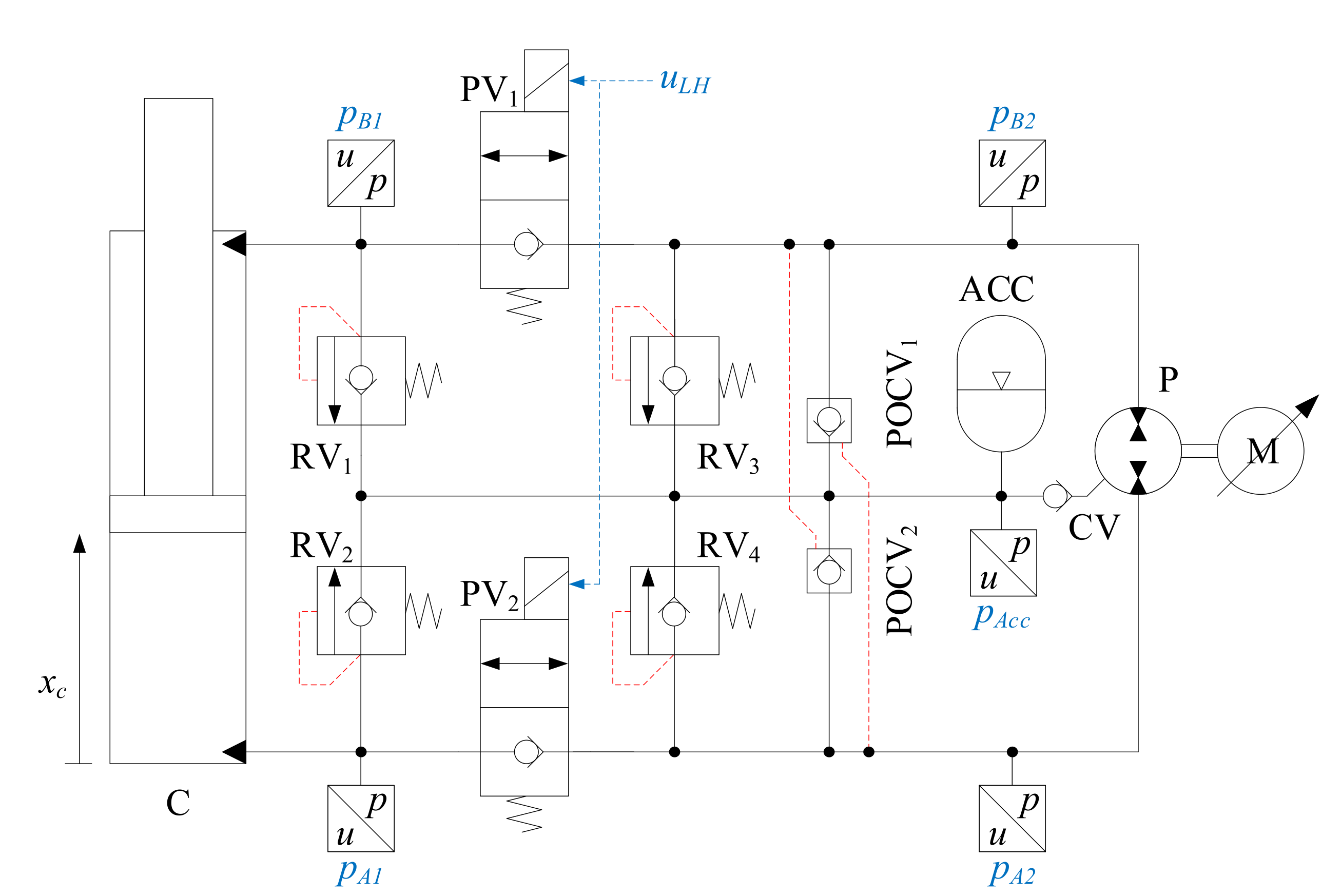
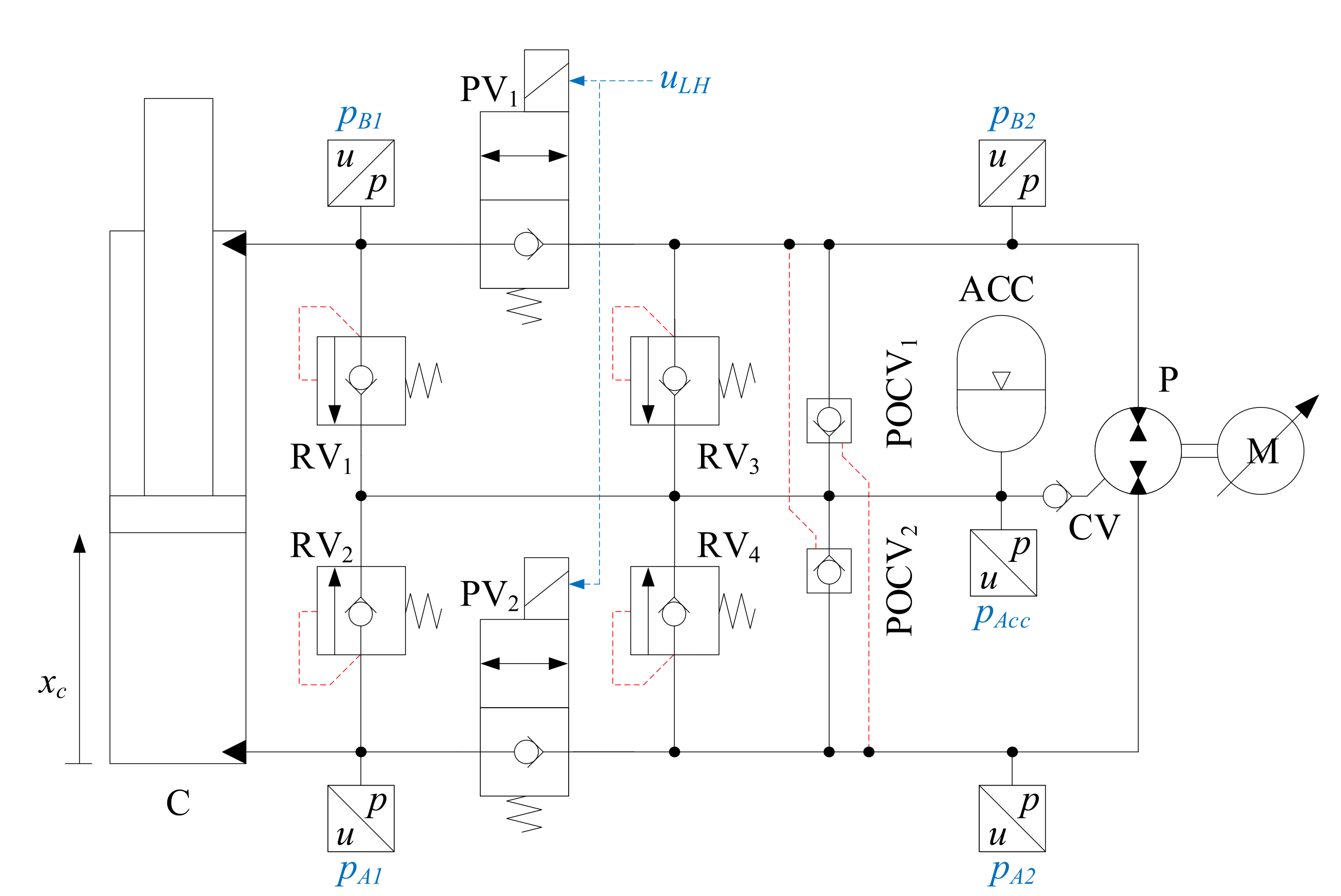
Figure 8.
Novel closed-loop electro-hydrostatic actuator circuit.
Figure 8.
Novel closed-loop electro-hydrostatic actuator circuit.
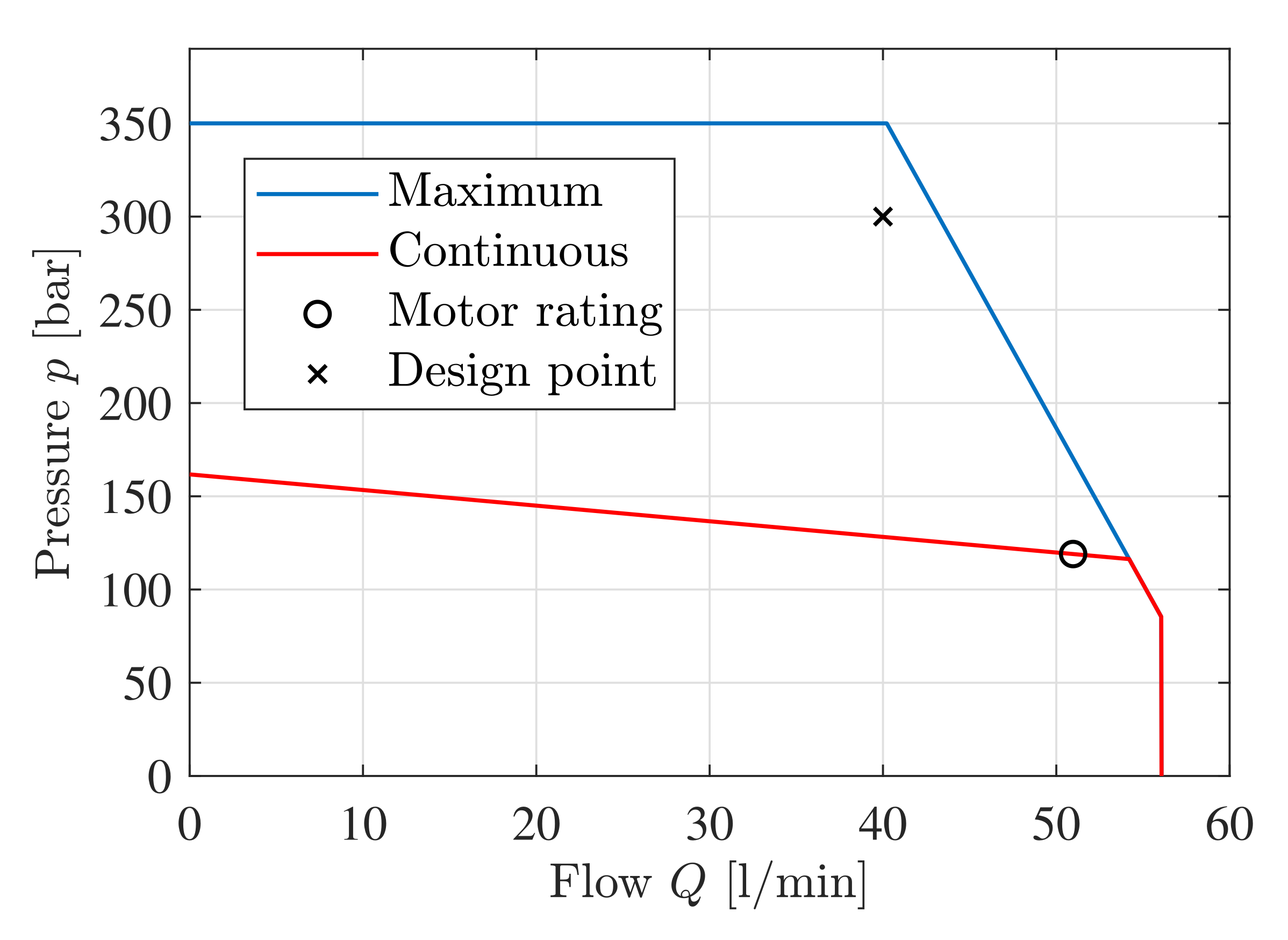
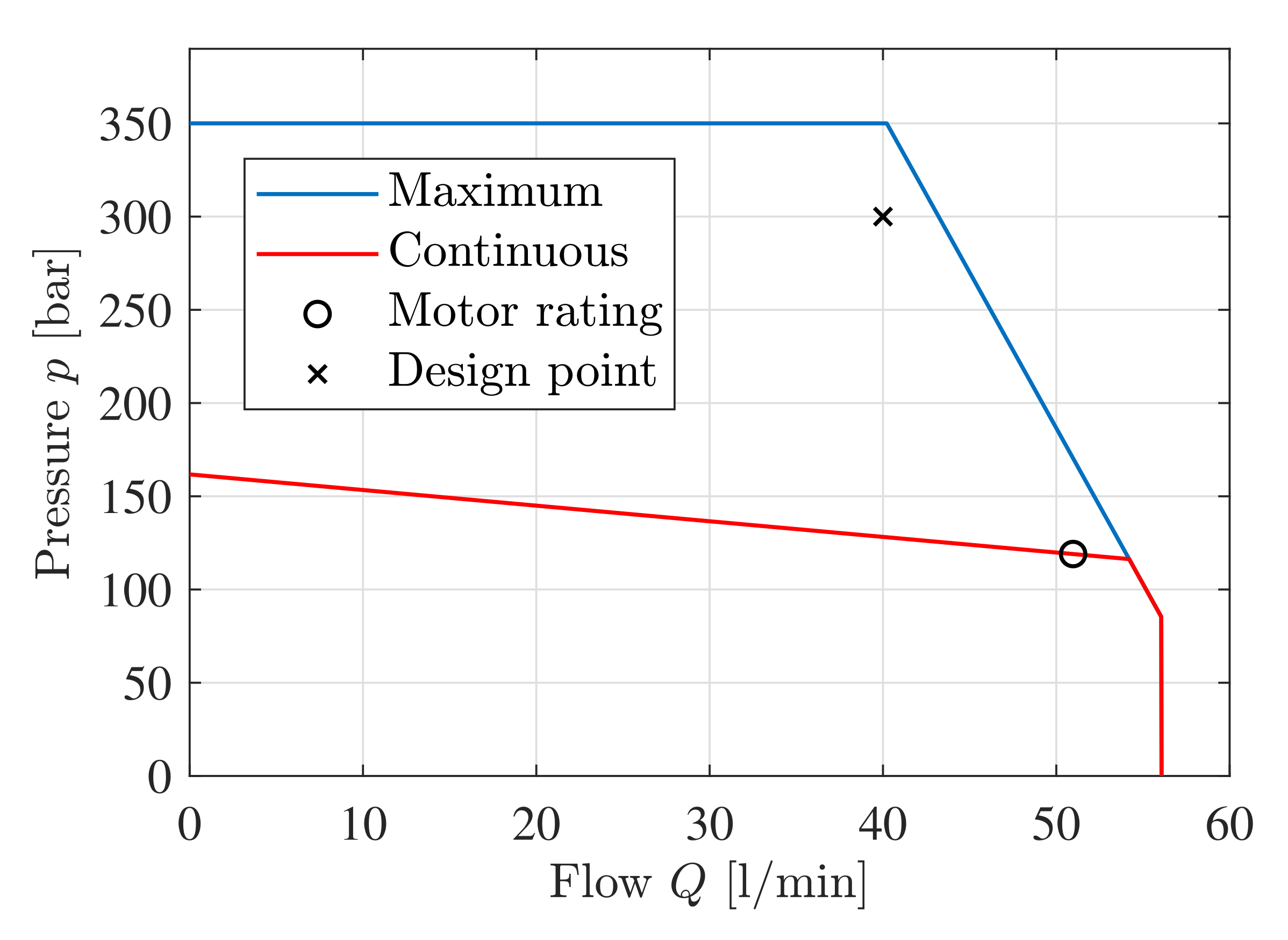
Figure 9.
Flow-pressure curve with selected motor and pump.
Figure 9.
Flow-pressure curve with selected motor and pump.
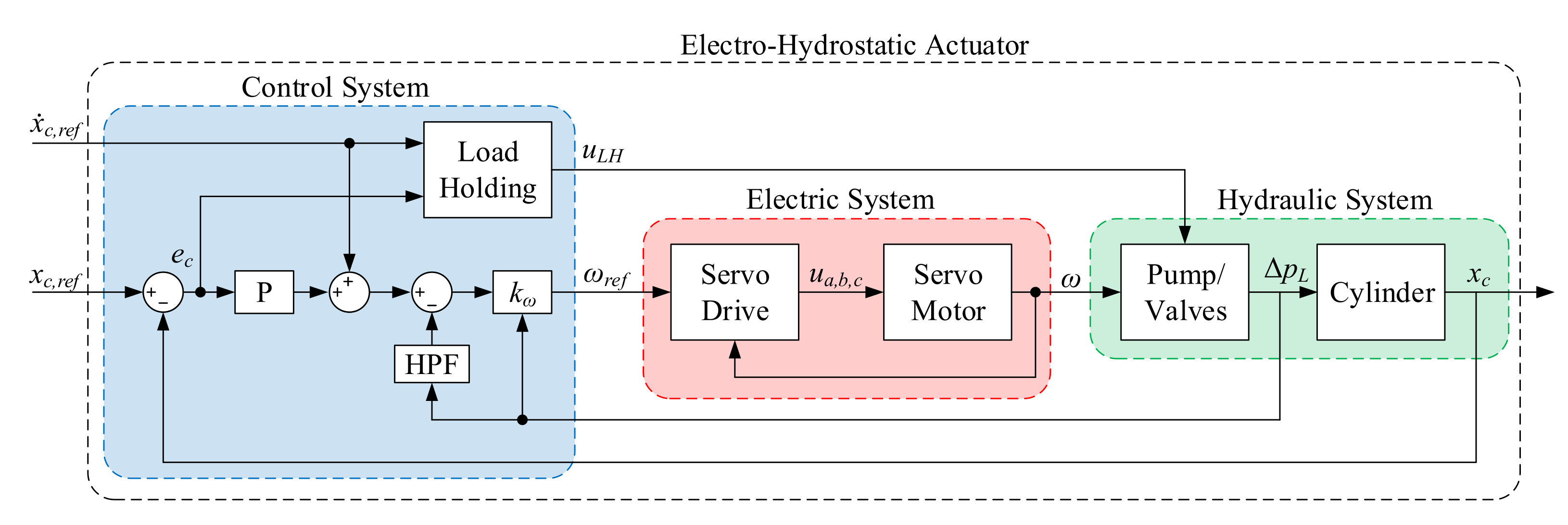
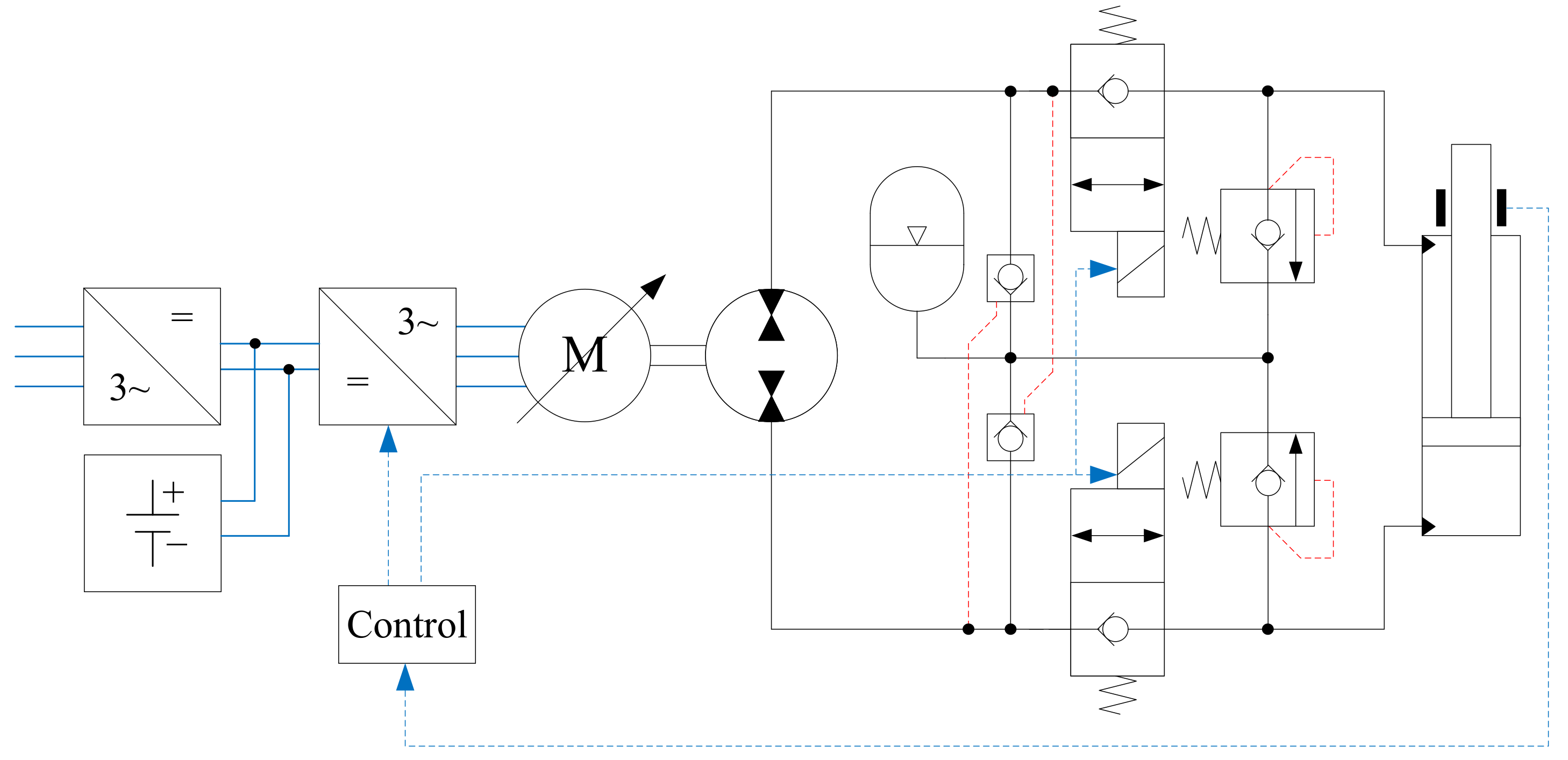
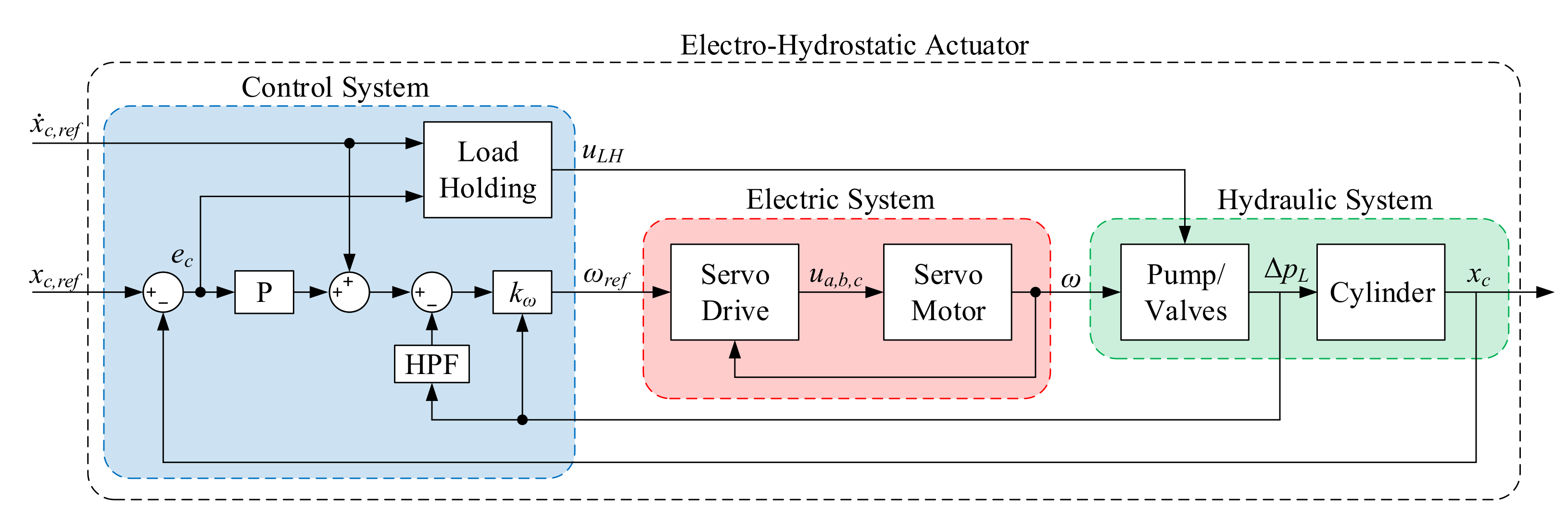
Figure 10.
Overview of the EHA with control system, electric system, and hydraulic system.
Figure 10.
Overview of the EHA with control system, electric system, and hydraulic system.
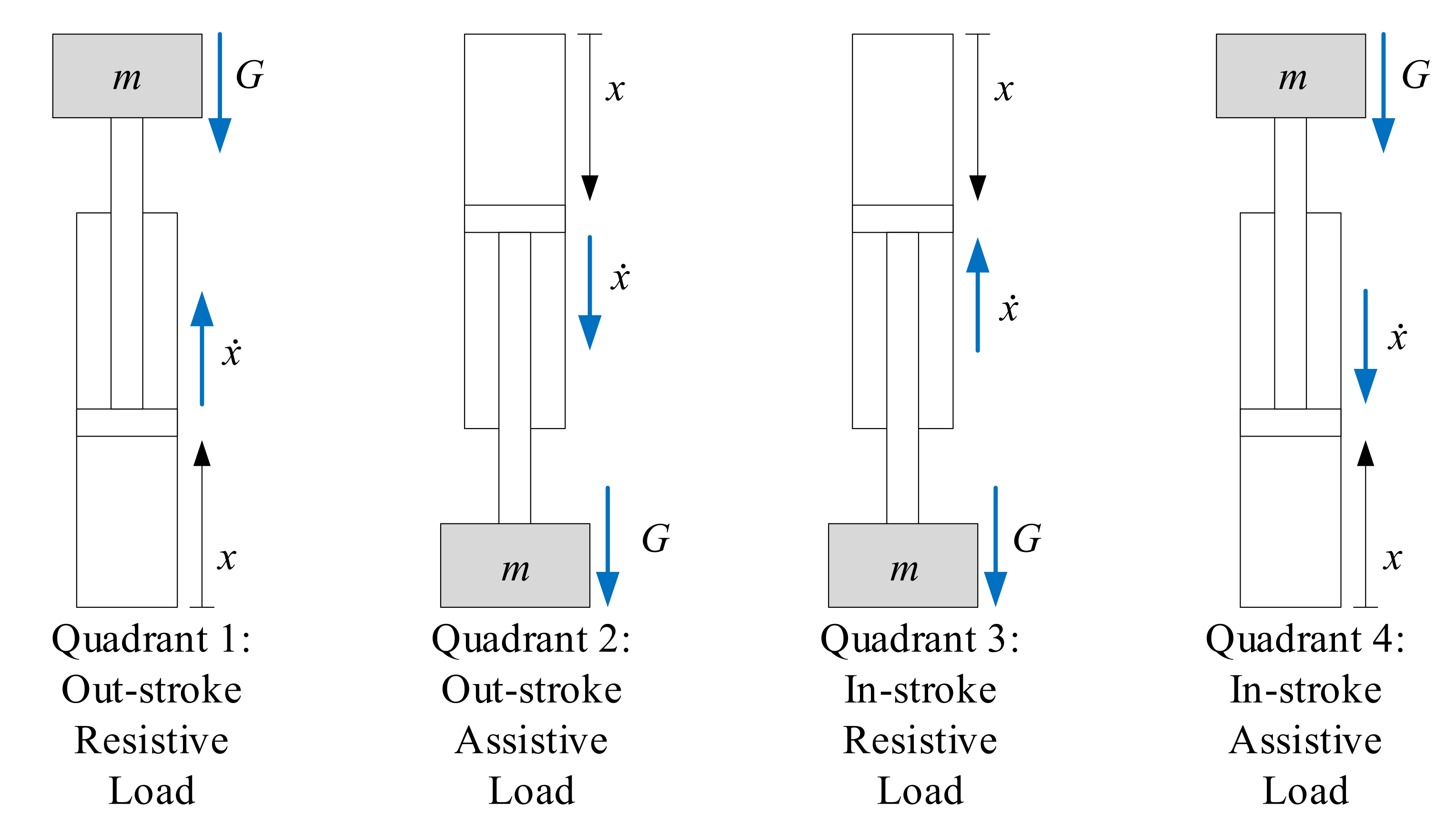
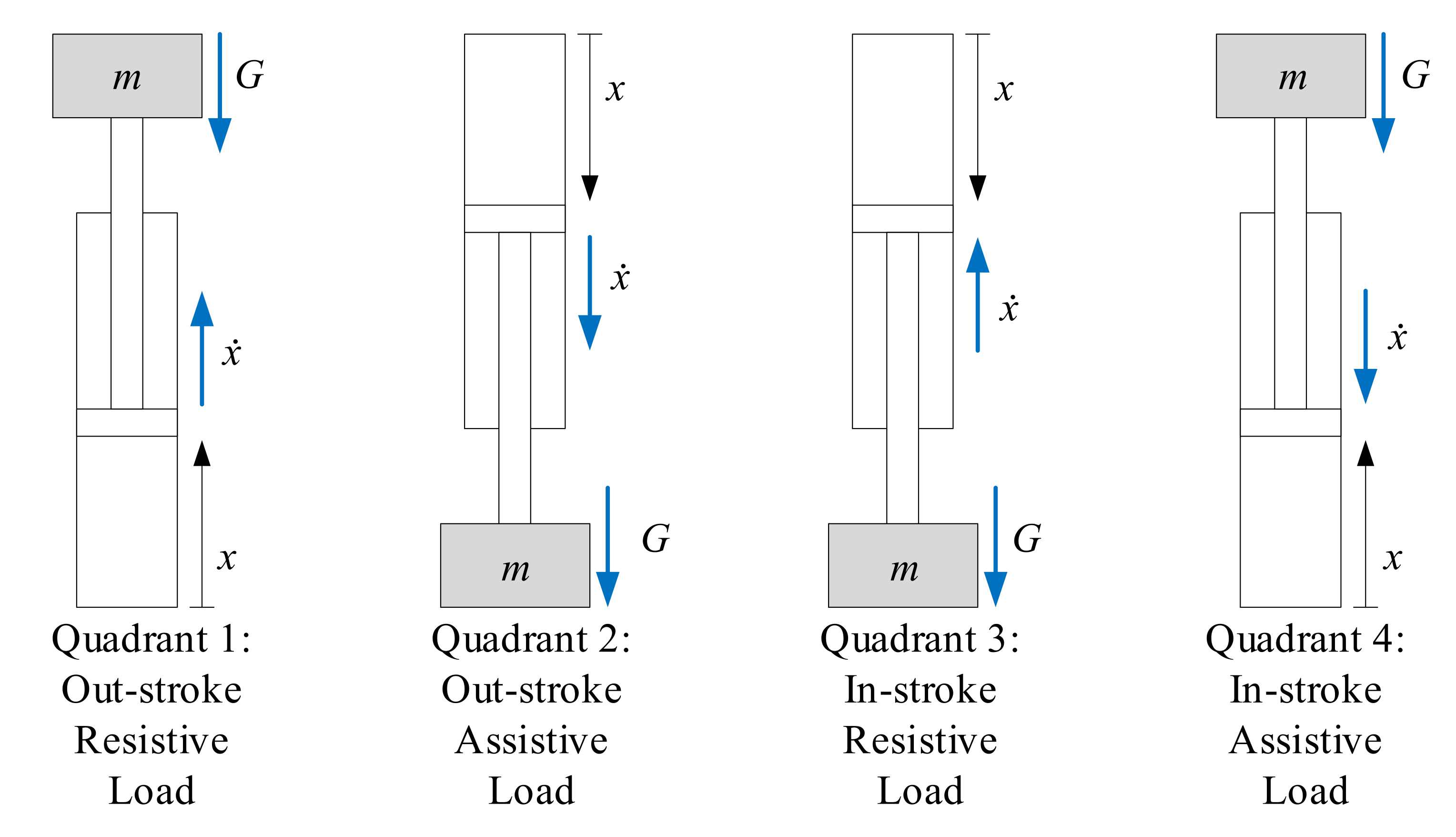
Figure 11.
Illustration of four quadrant cylinder velocity and load mass with vertical motion.
Figure 11.
Illustration of four quadrant cylinder velocity and load mass with vertical motion.
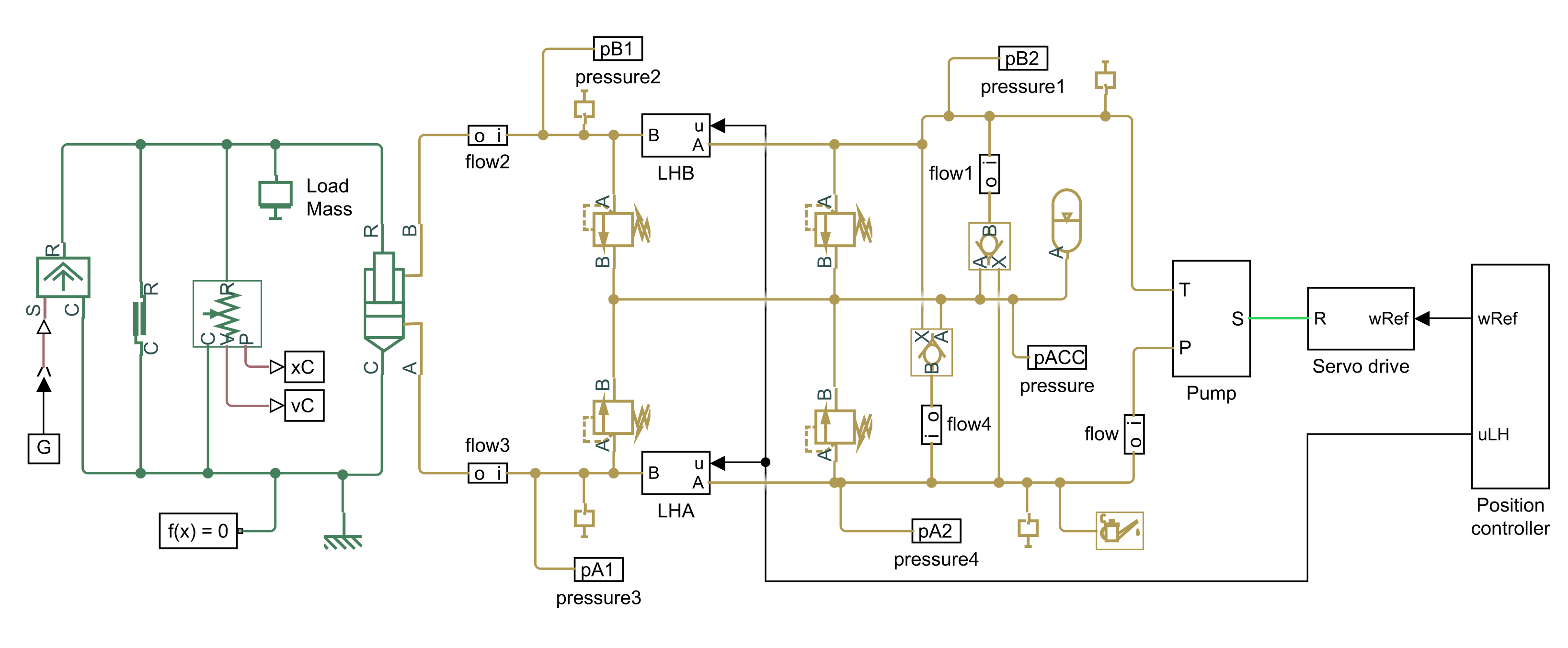
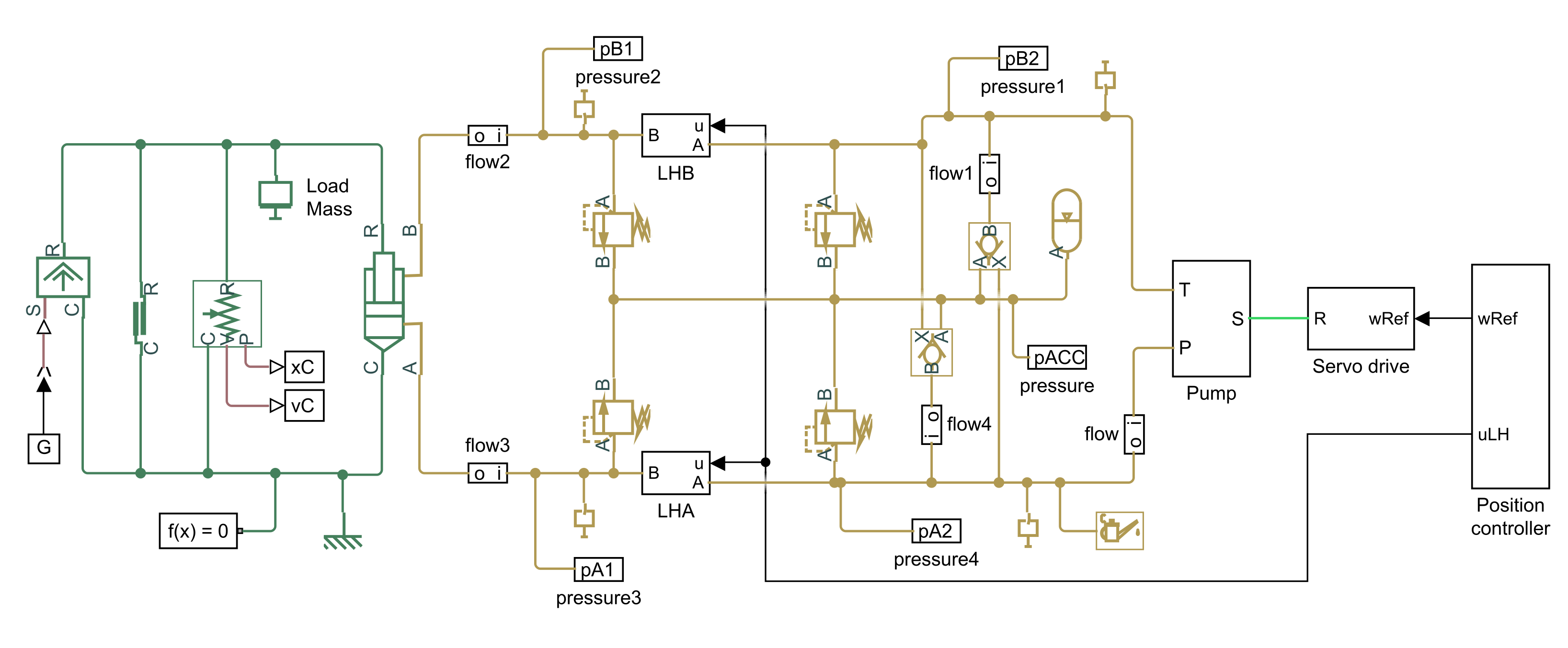
Figure 12.
Simscape model of the EHA.
Figure 12.
Simscape model of the EHA.
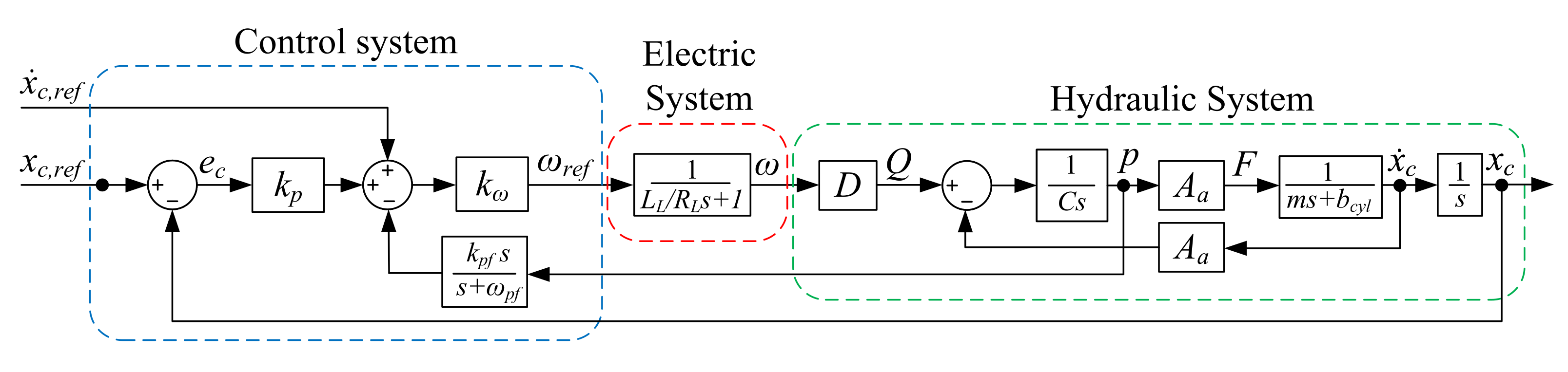
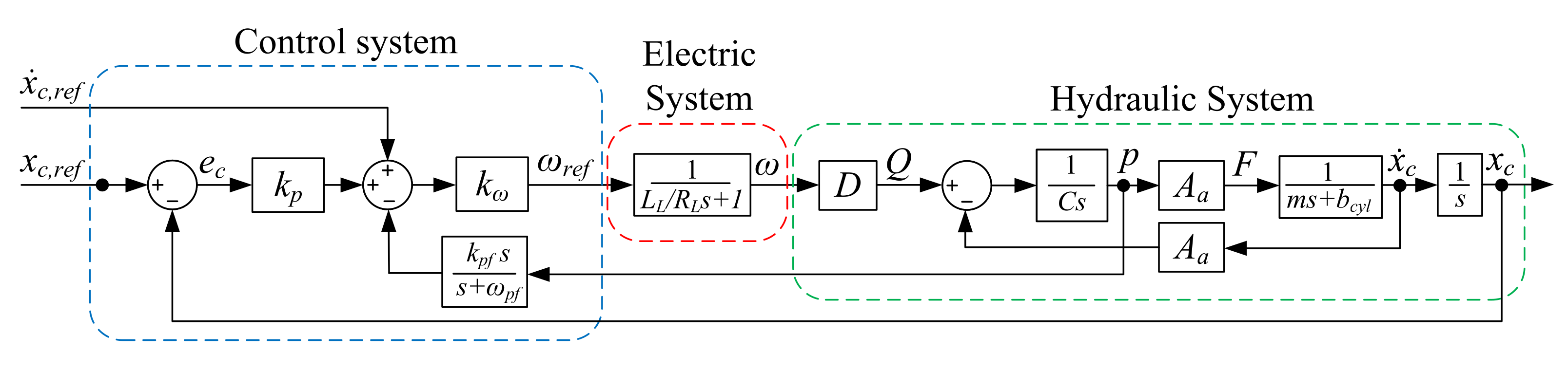
Figure 13.
Closed-loop linear model of the EHA.
Figure 13.
Closed-loop linear model of the EHA.
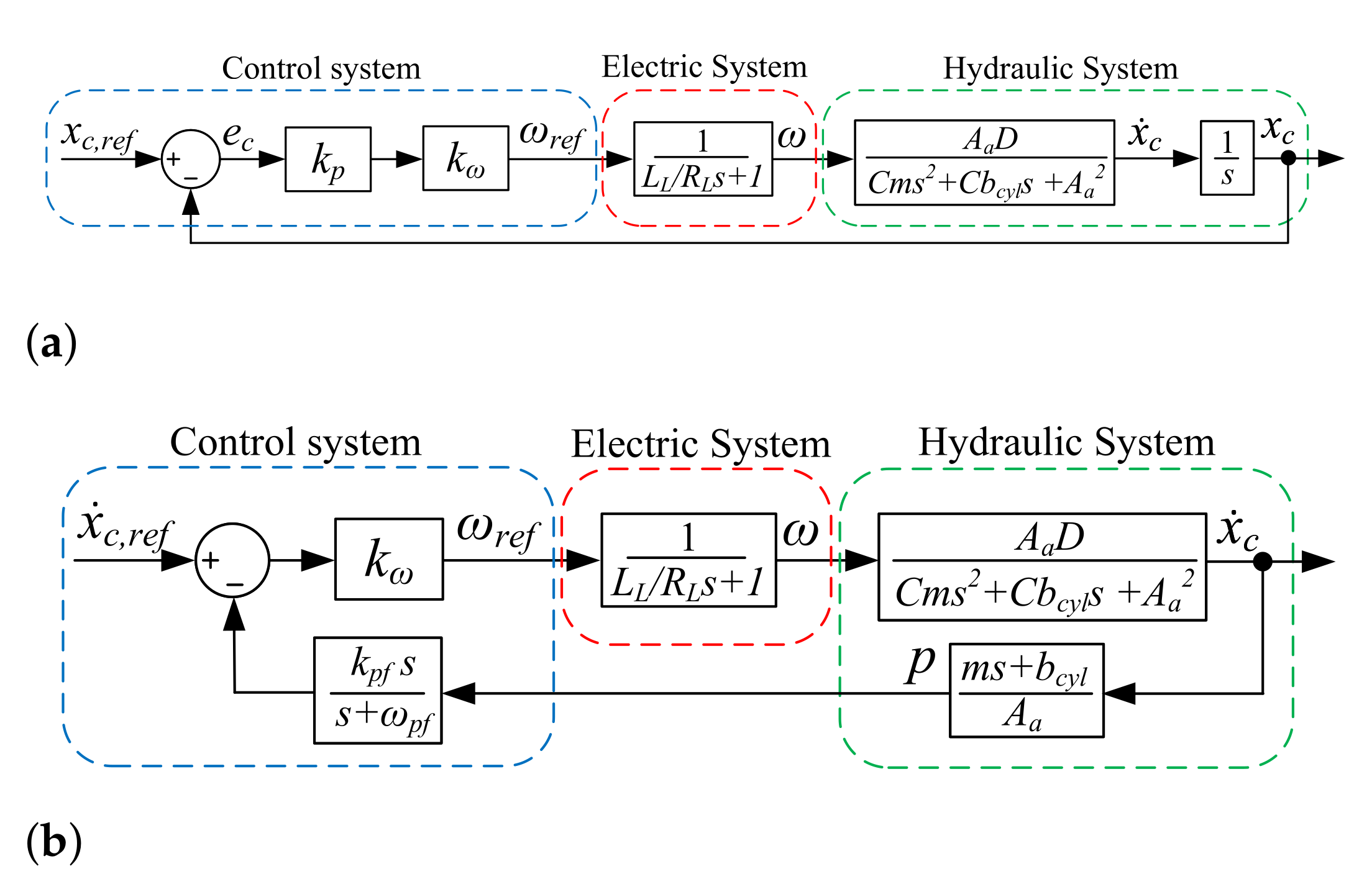
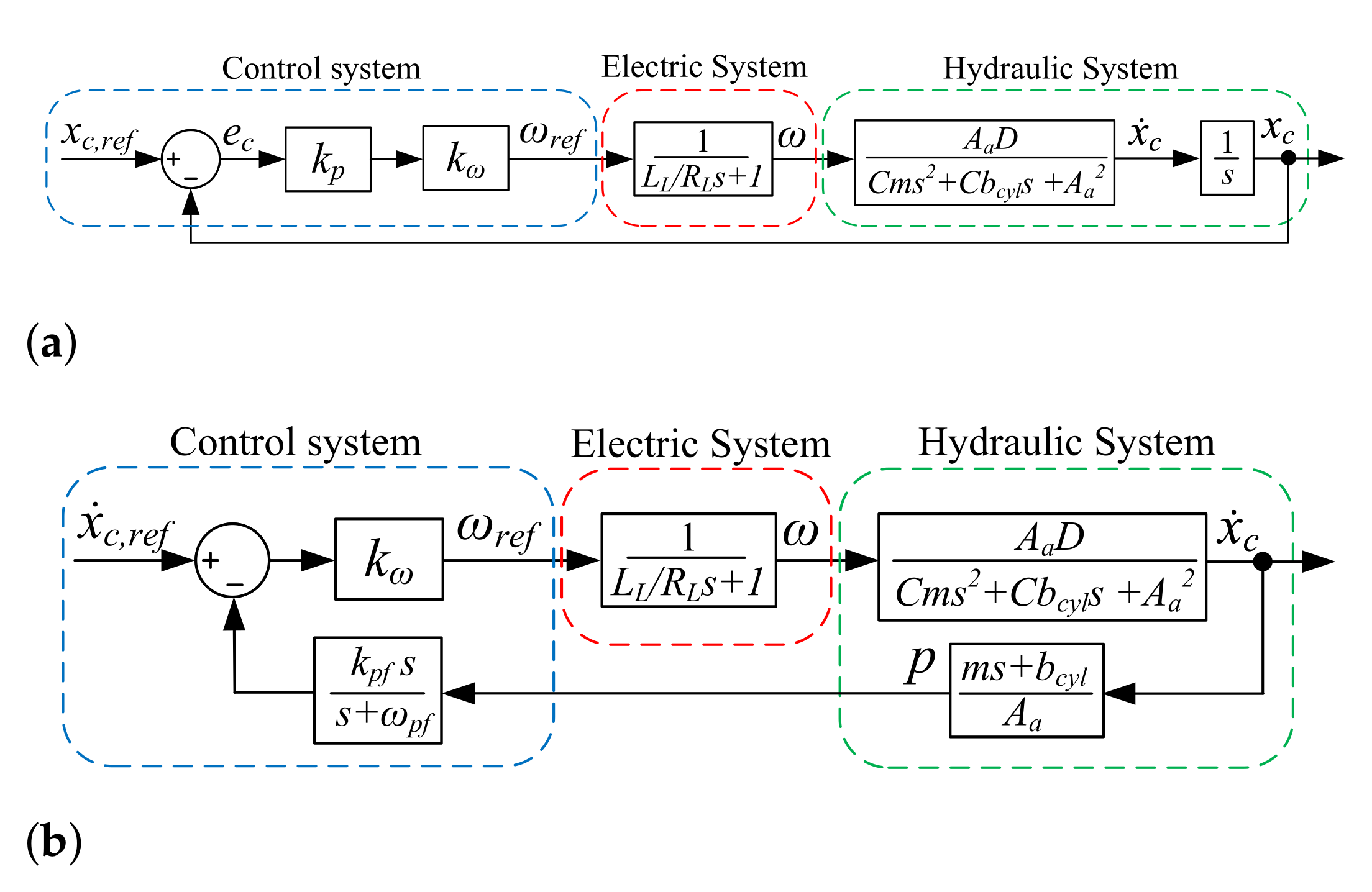
Figure 14.
Simplified linear models used for tuning. (a) Linear model for tuning ; (b) Linear model for tuning .
Figure 14.
Simplified linear models used for tuning. (a) Linear model for tuning ; (b) Linear model for tuning .
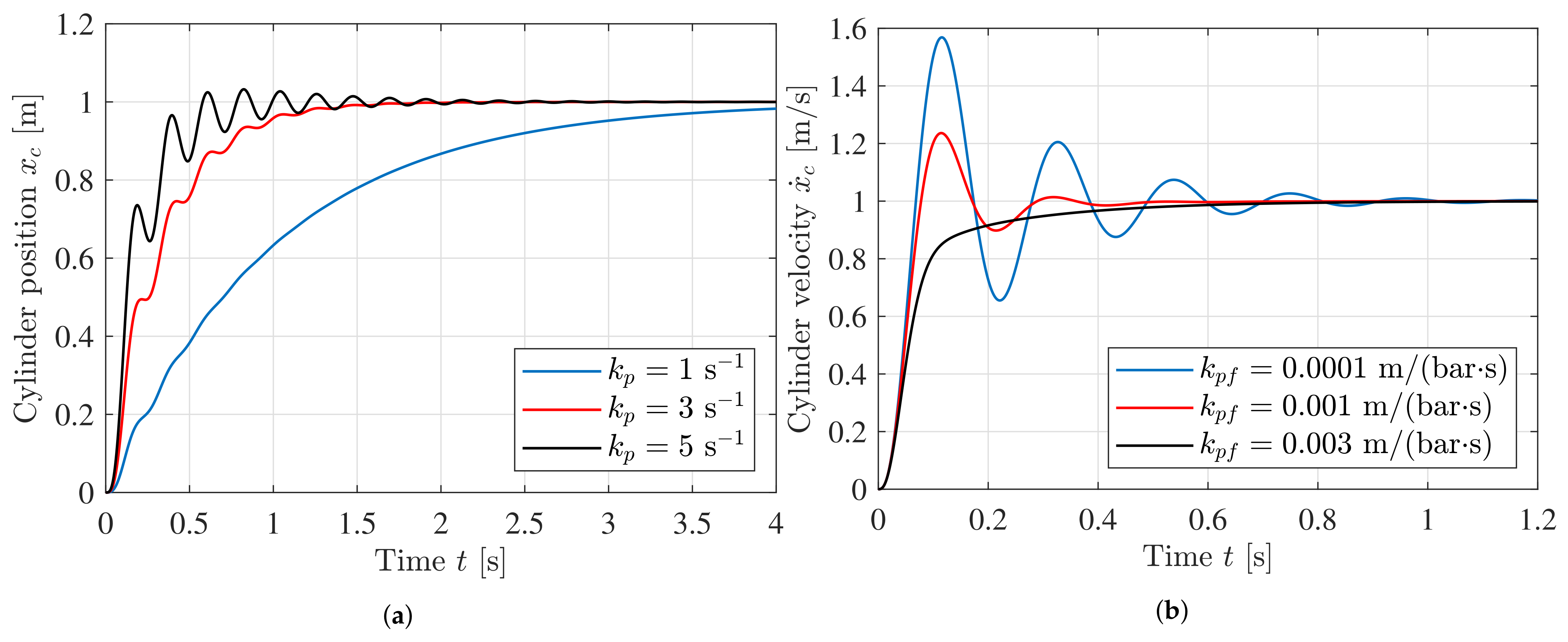
Figure 15.
Step responses from the linear models. (
a) Tuned step responses of
from
Figure 14a; (
b) Tuned step responses of
from
Figure 14b.
Figure 15.
Step responses from the linear models. (
a) Tuned step responses of
from
Figure 14a; (
b) Tuned step responses of
from
Figure 14b.
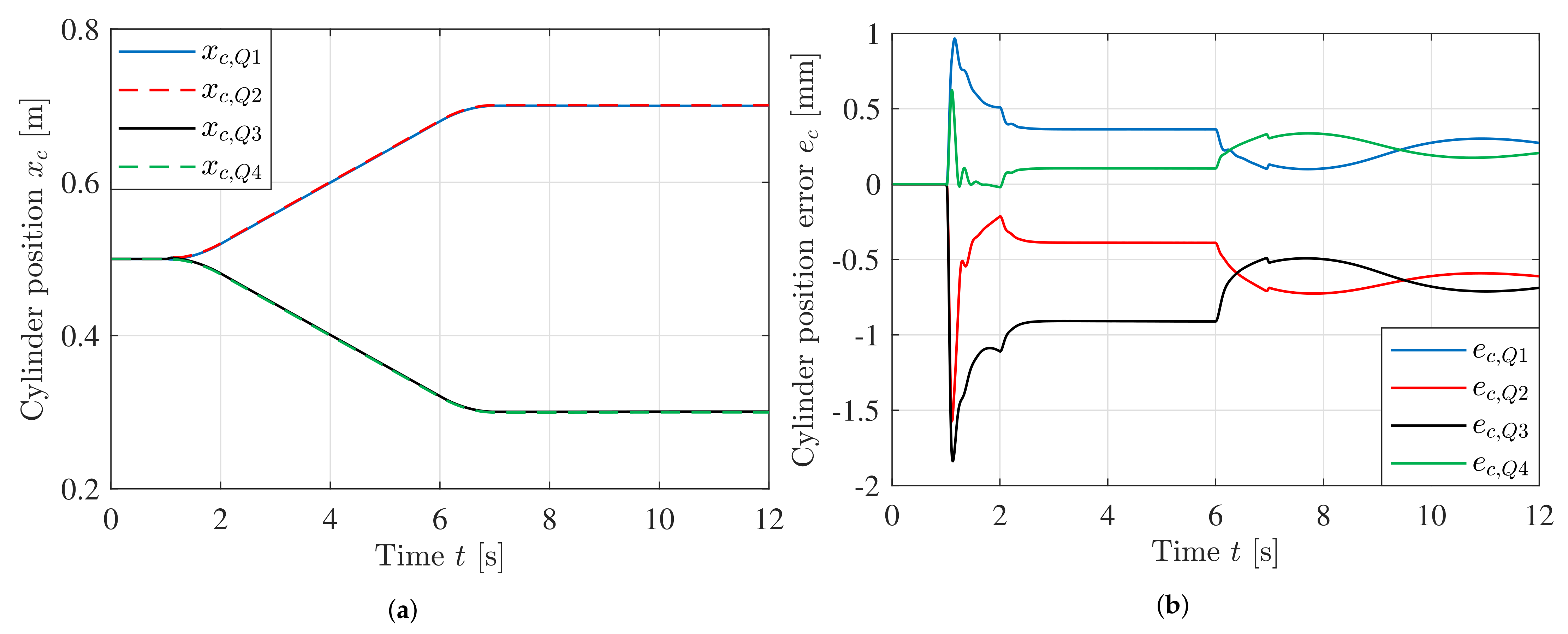
Figure 16.
Cylinder position and position error for all four quadrants. (a) Cylinder position ; (b) Cylinder position error .
Figure 16.
Cylinder position and position error for all four quadrants. (a) Cylinder position ; (b) Cylinder position error .
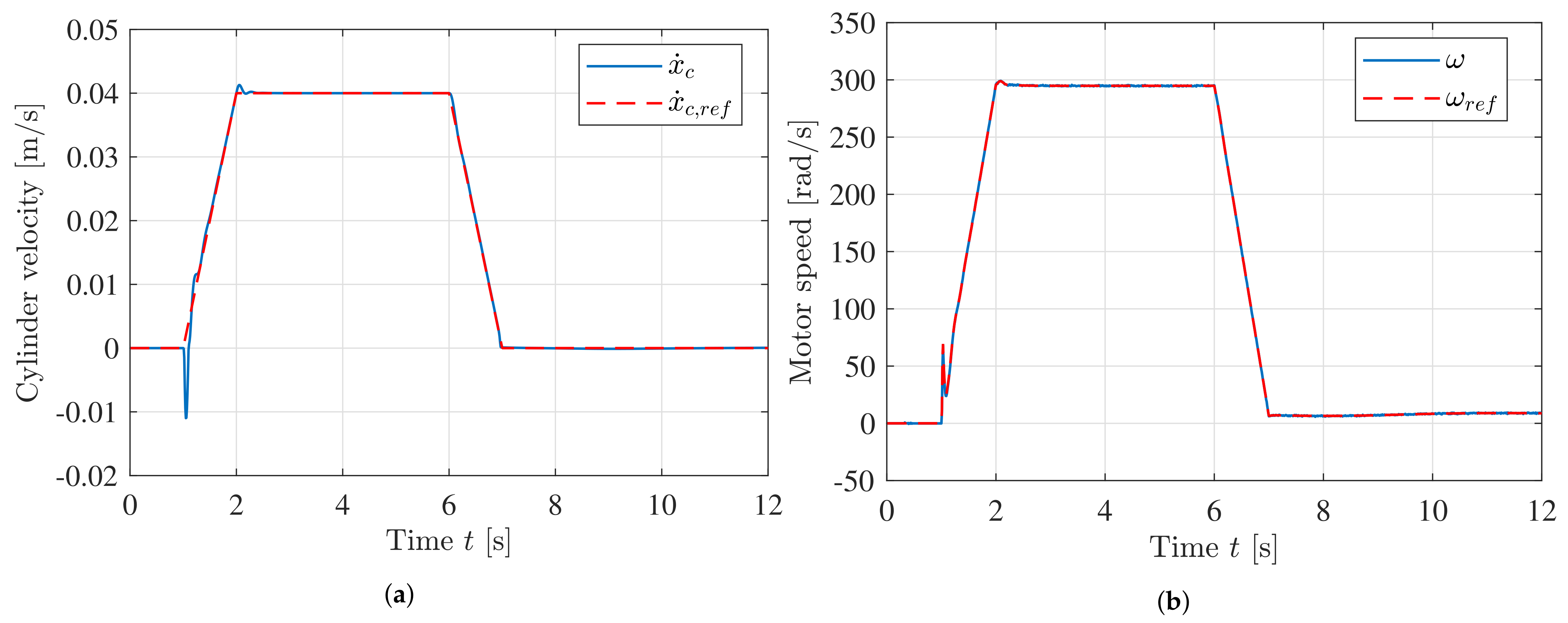
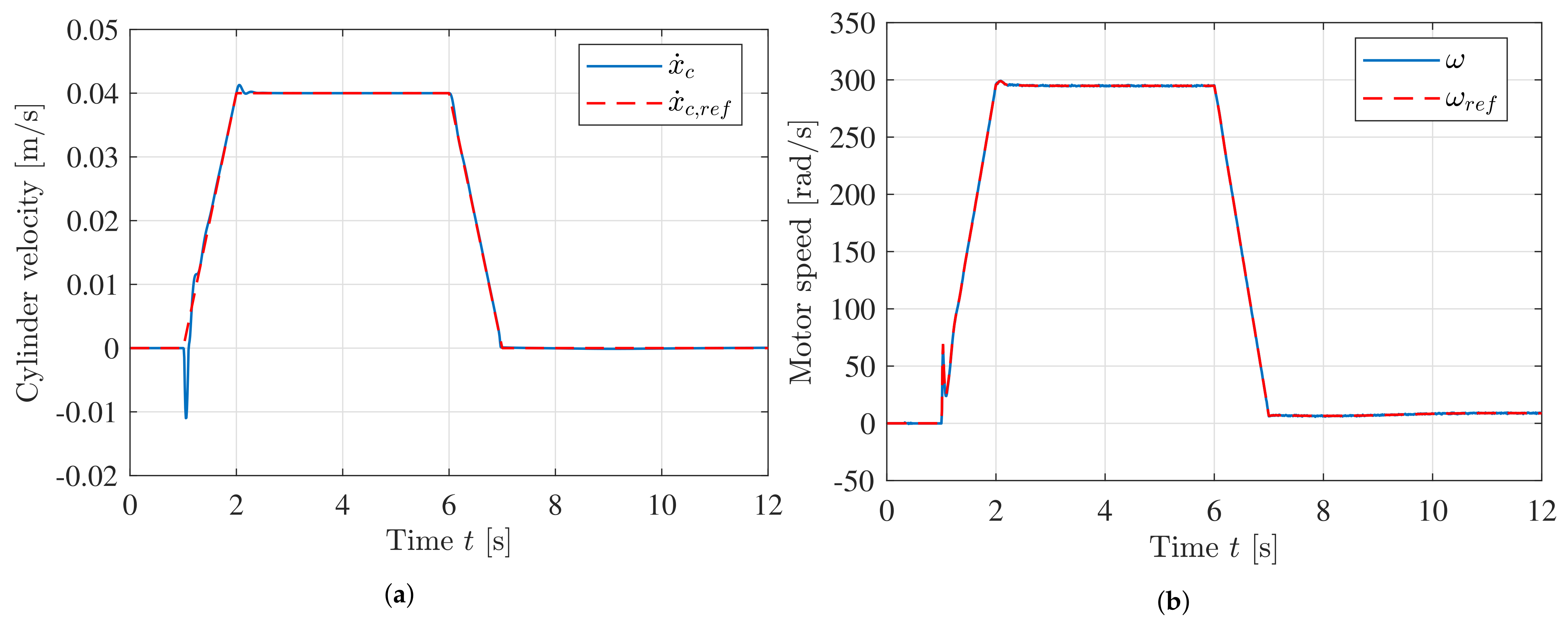
Figure 17.
Cylinder velocity and motor speed for operation in quadrant 1. (a) Cylinder velocity ; (b) Motor speed .
Figure 17.
Cylinder velocity and motor speed for operation in quadrant 1. (a) Cylinder velocity ; (b) Motor speed .
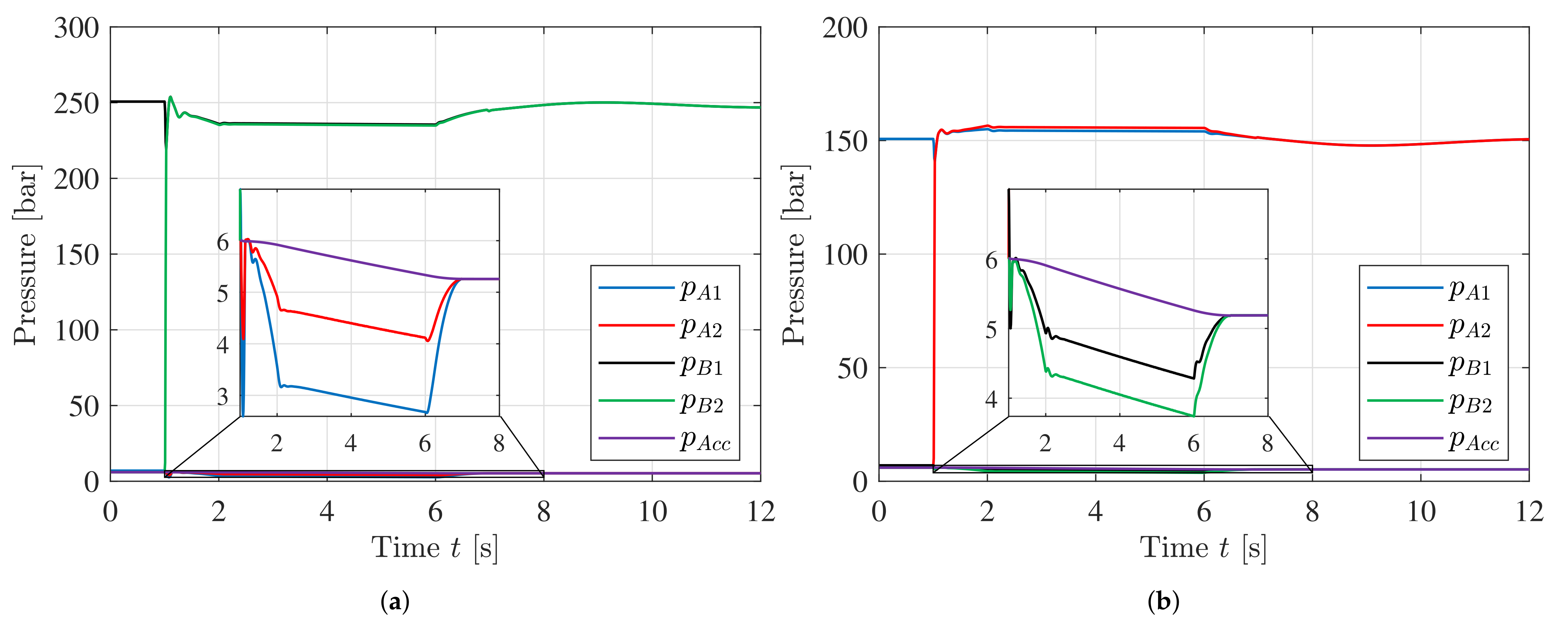
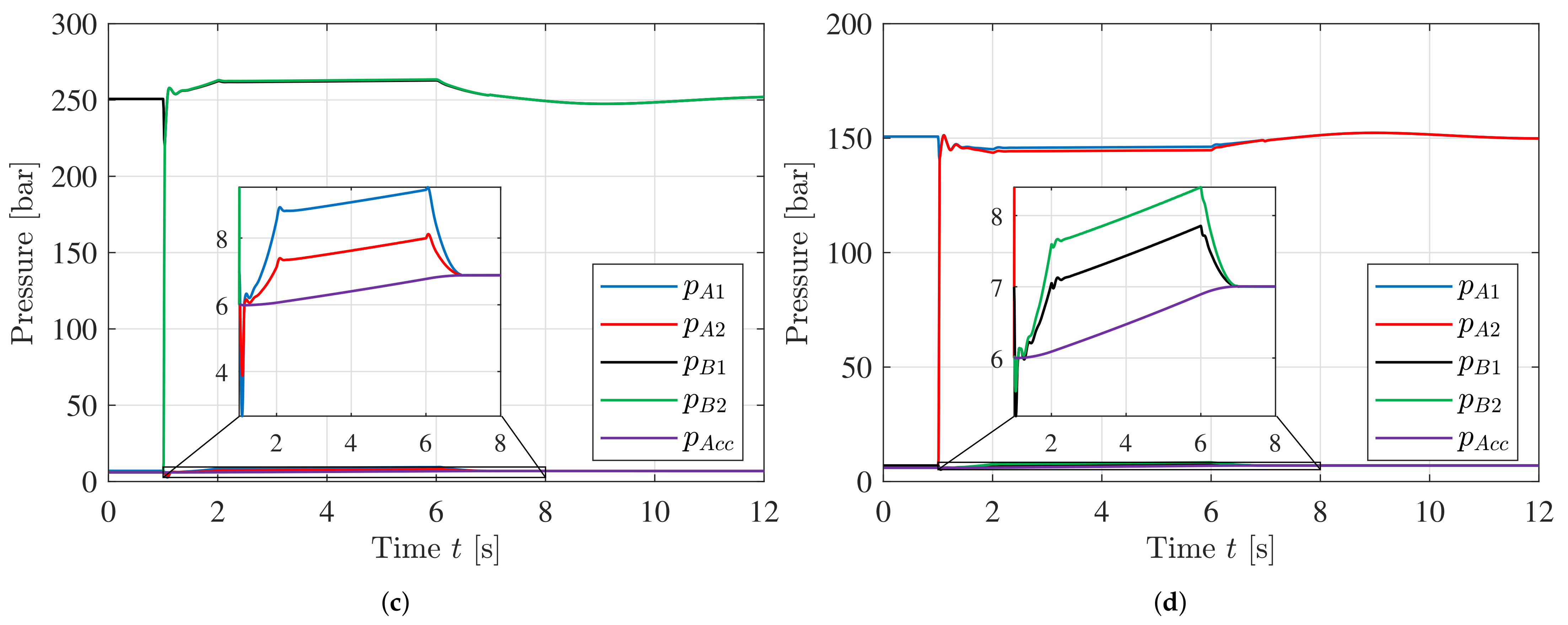
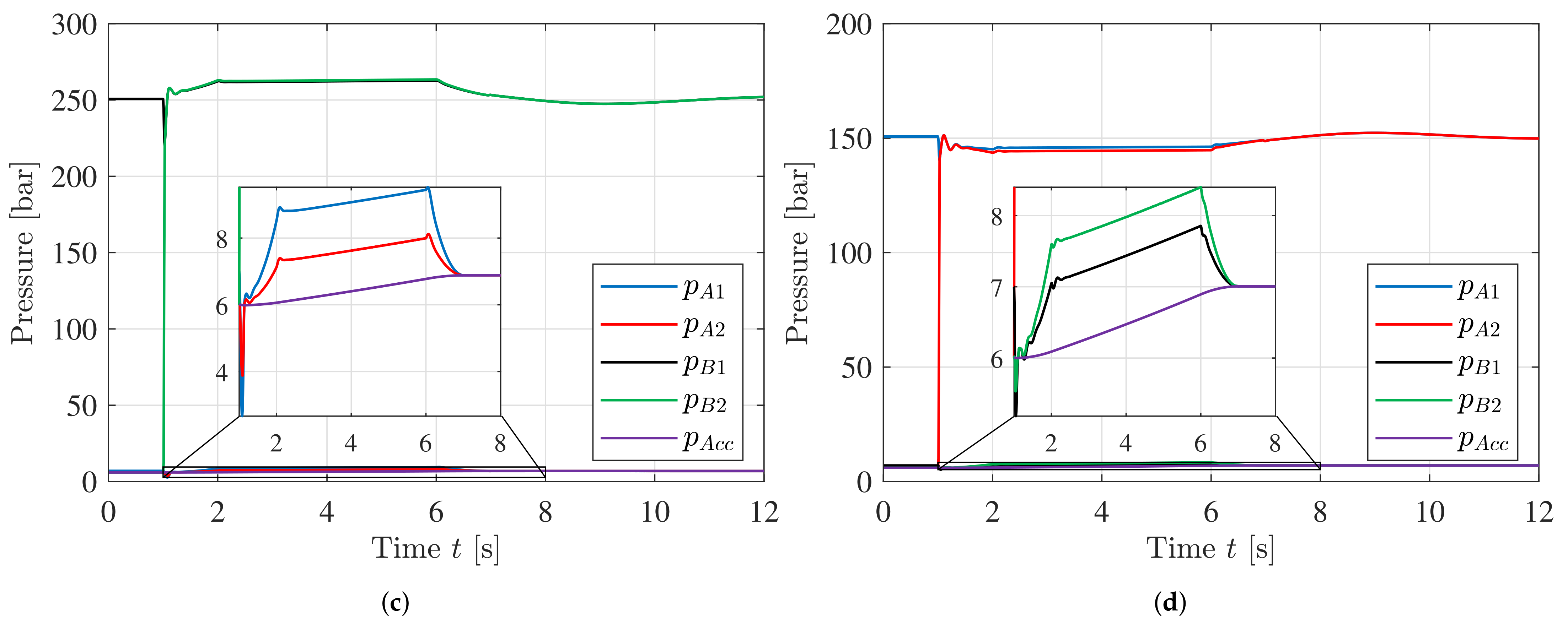
Figure 18.
System pressures for all four quadrants during motion. (a) Quadrant 2; (b) Quadrant 1; (c) Quadrant 3; (d) Quadrant 4.
Figure 18.
System pressures for all four quadrants during motion. (a) Quadrant 2; (b) Quadrant 1; (c) Quadrant 3; (d) Quadrant 4.
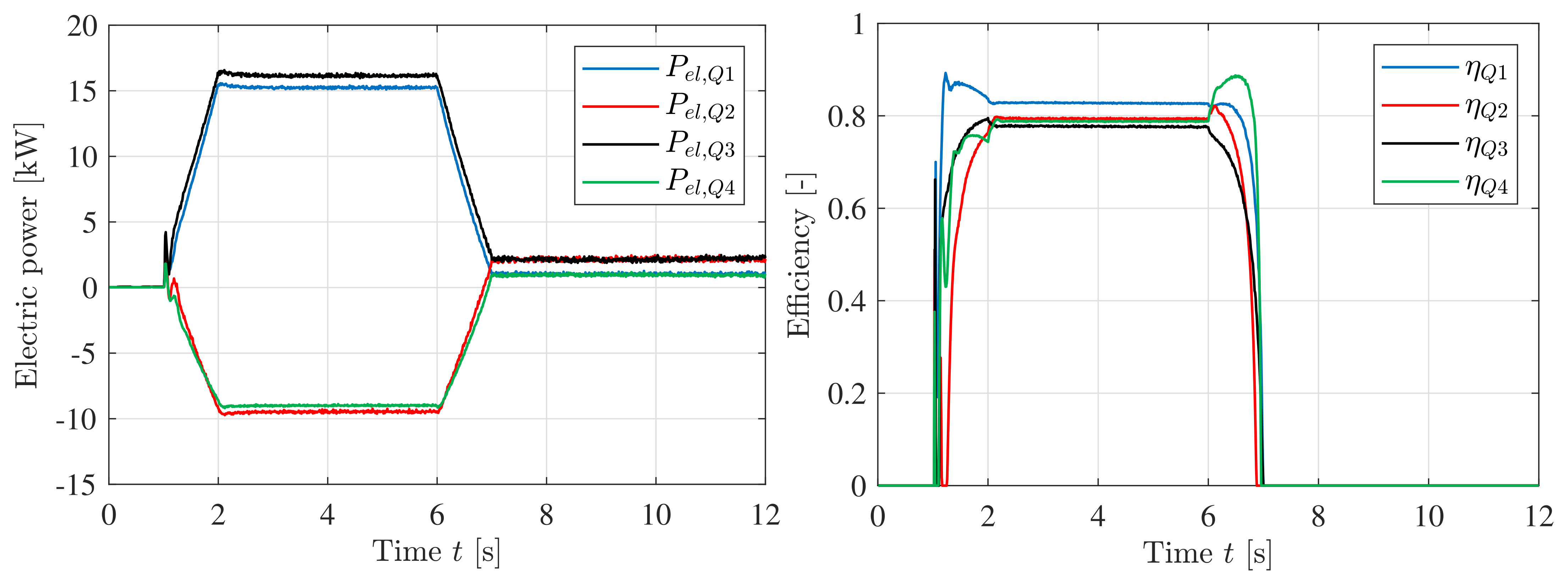
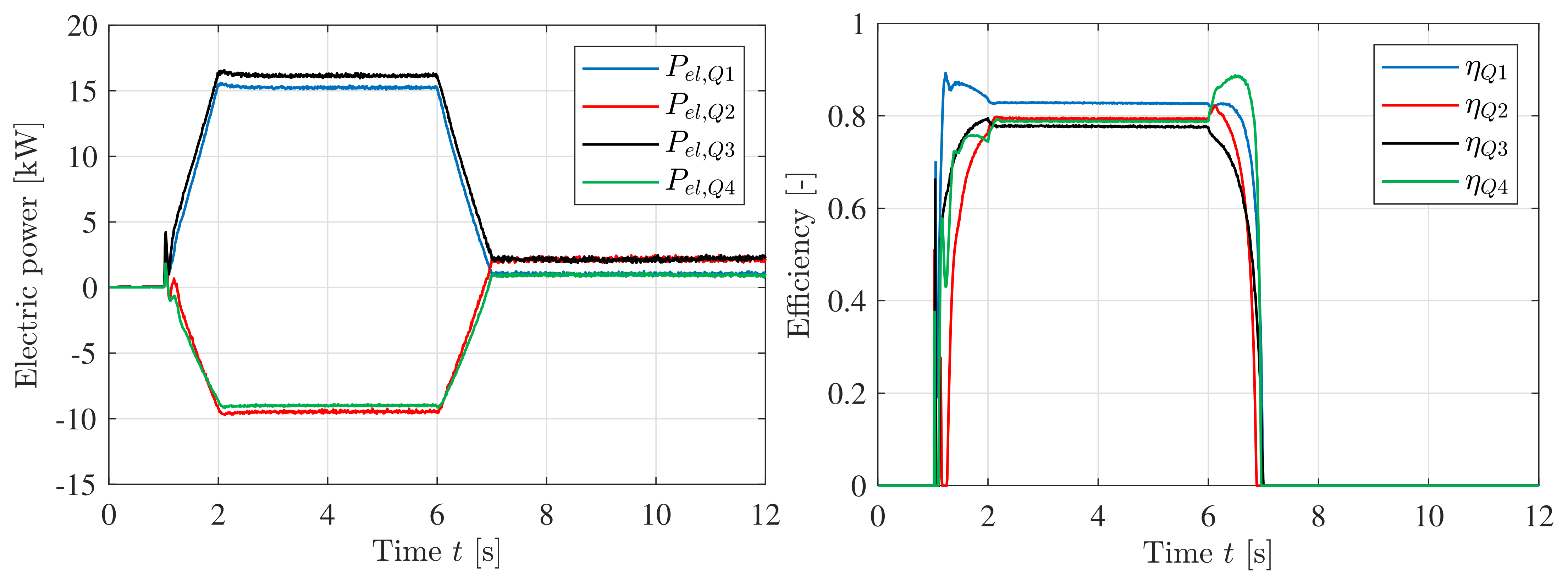
Figure 19.
Electric power and efficiency for all four quadrants. Operation in quadrants 1 and 3 consume power, while operation in quadrants 2 and 4 regenerate power. (a) Electric power from/to the DC-bus; (b) Efficiency of the system.
Figure 19.
Electric power and efficiency for all four quadrants. Operation in quadrants 1 and 3 consume power, while operation in quadrants 2 and 4 regenerate power. (a) Electric power from/to the DC-bus; (b) Efficiency of the system.
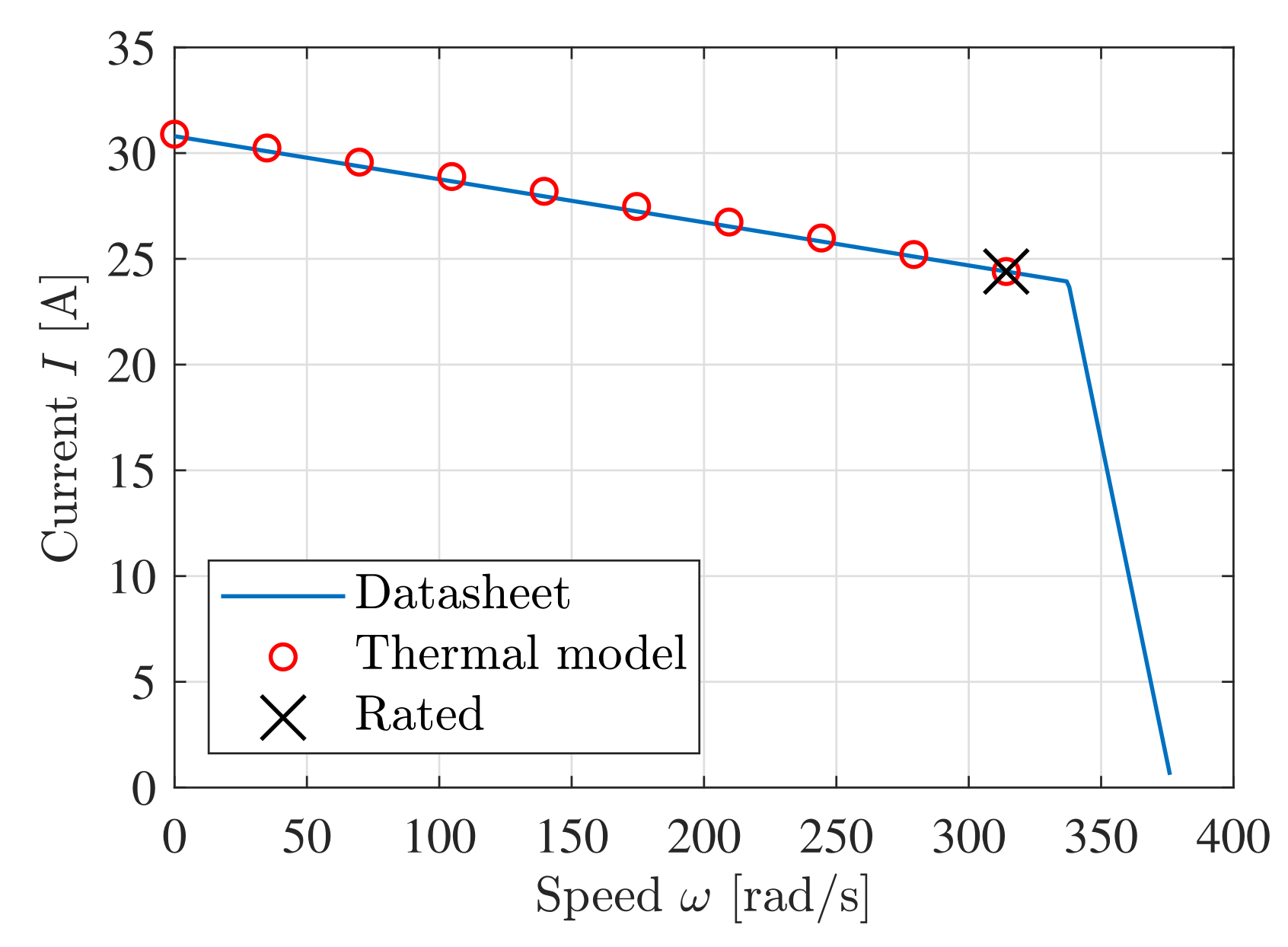
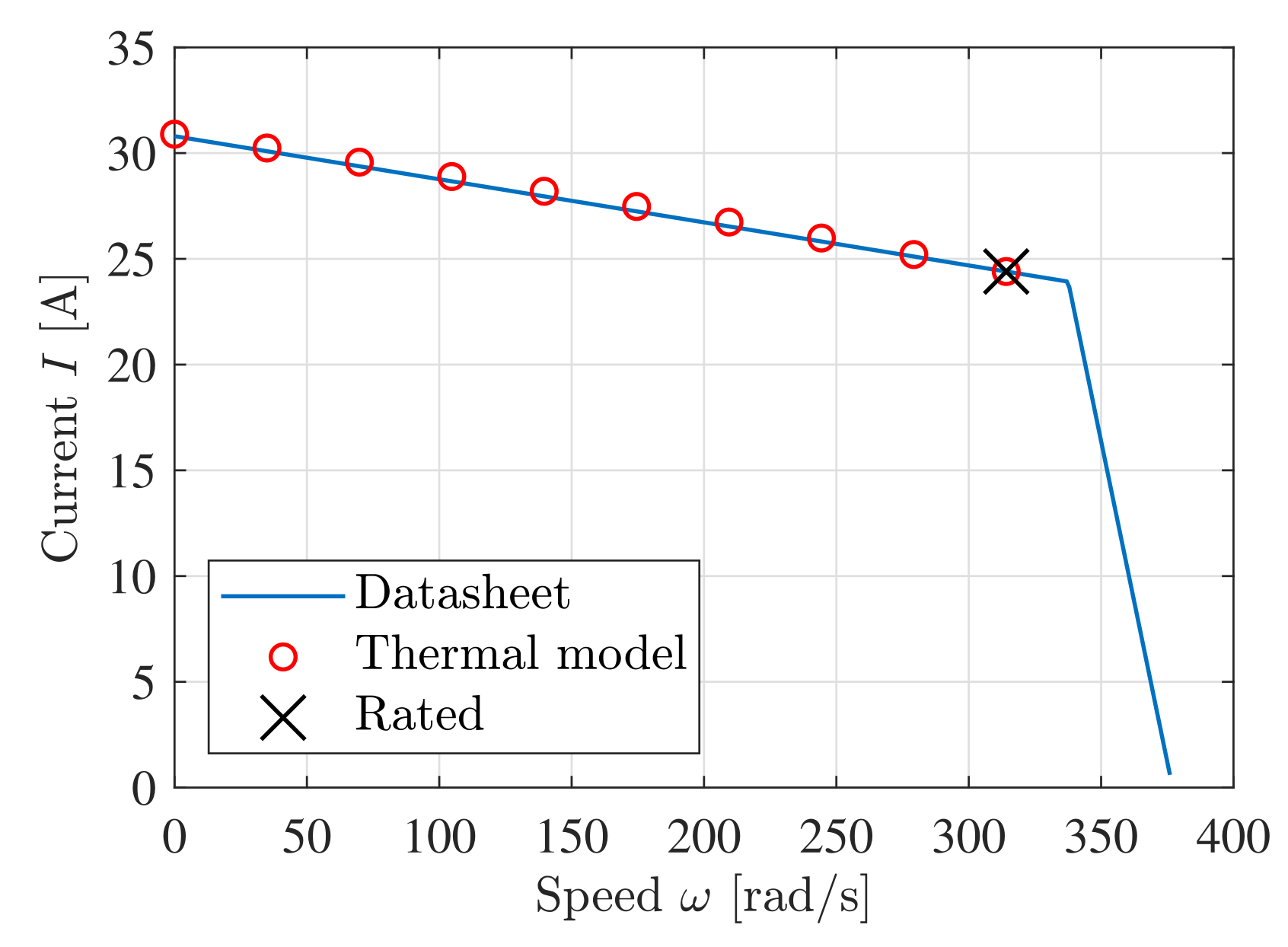
Figure 20.
Allowable continuous current to stay below 105 C.
Figure 20.
Allowable continuous current to stay below 105 C.
Figure 21.
Position reference and temperature for the load cycle running repeatedly for 5 h. (a) Position reference; (b) Temperatures with different loads.
Figure 21.
Position reference and temperature for the load cycle running repeatedly for 5 h. (a) Position reference; (b) Temperatures with different loads.
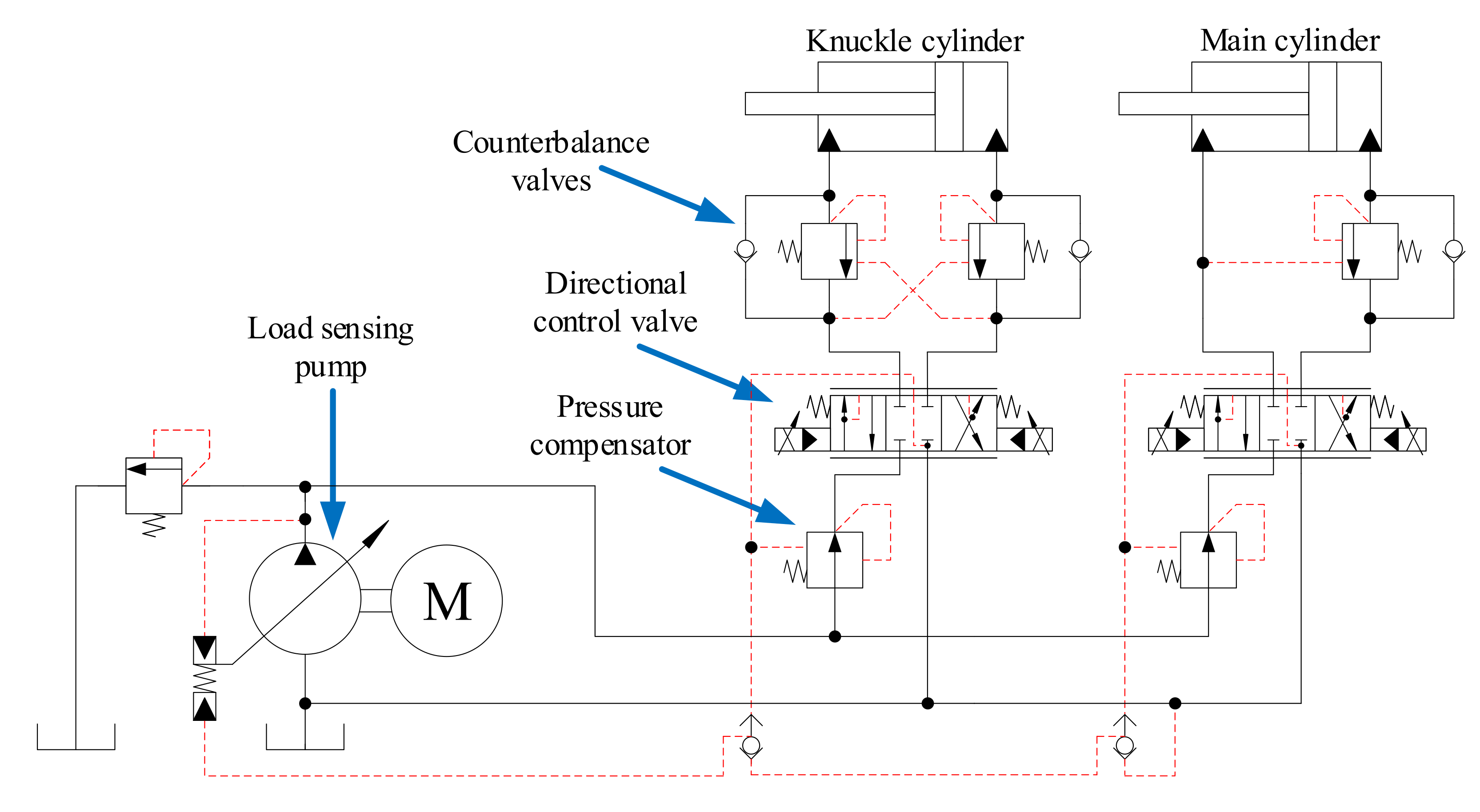
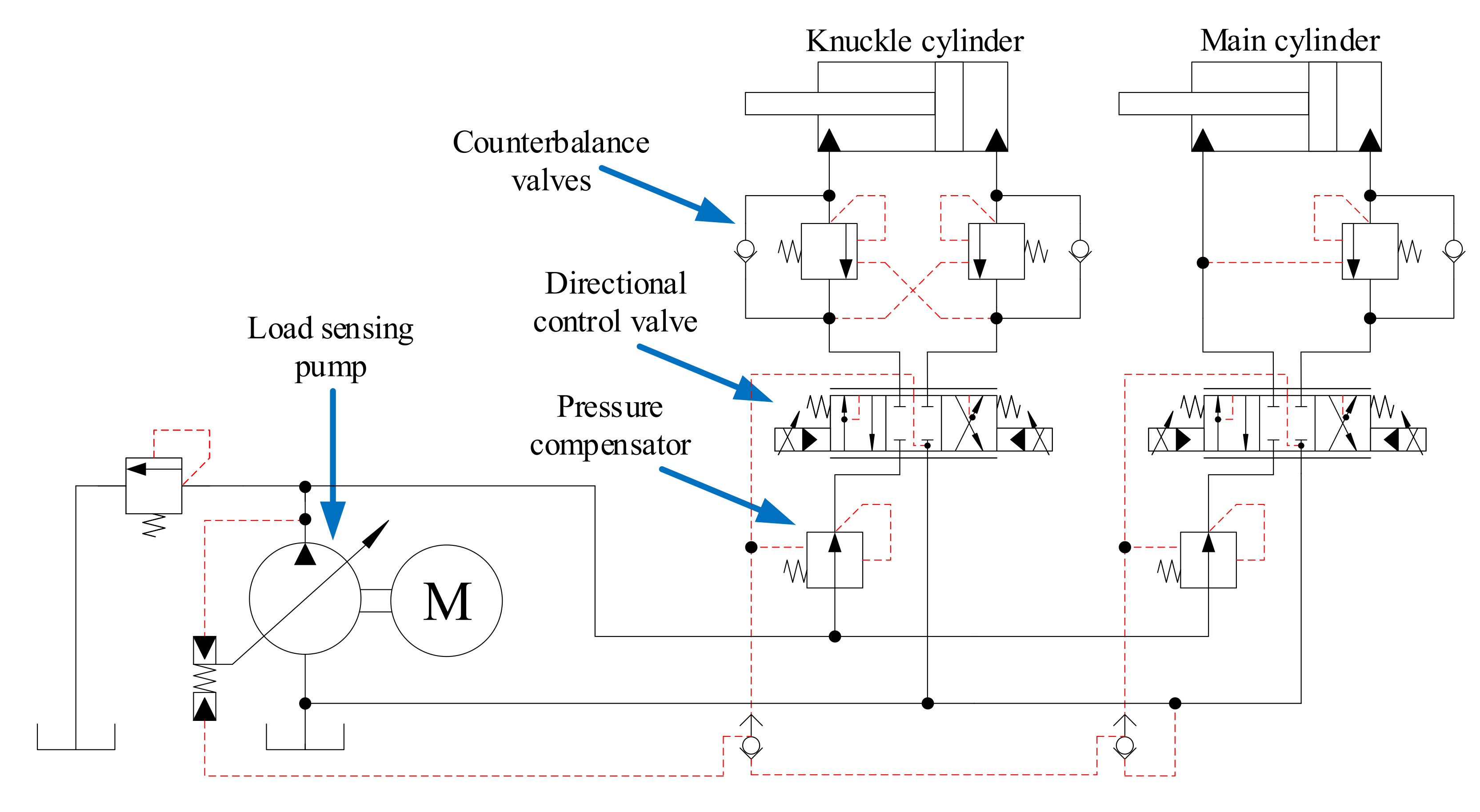
Figure 22.
Hydraulic circuit for the valve-controlled system.
Figure 22.
Hydraulic circuit for the valve-controlled system.
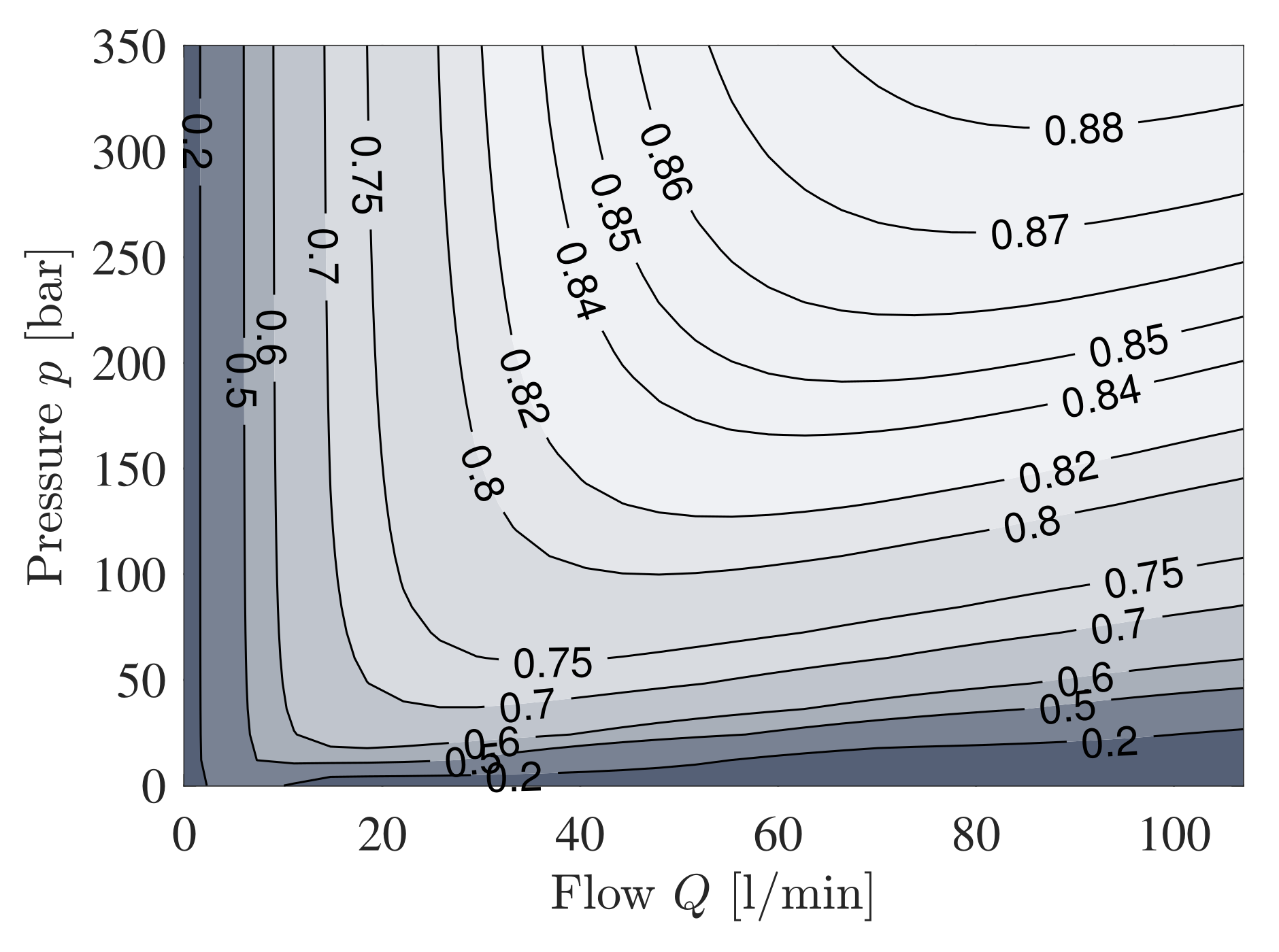
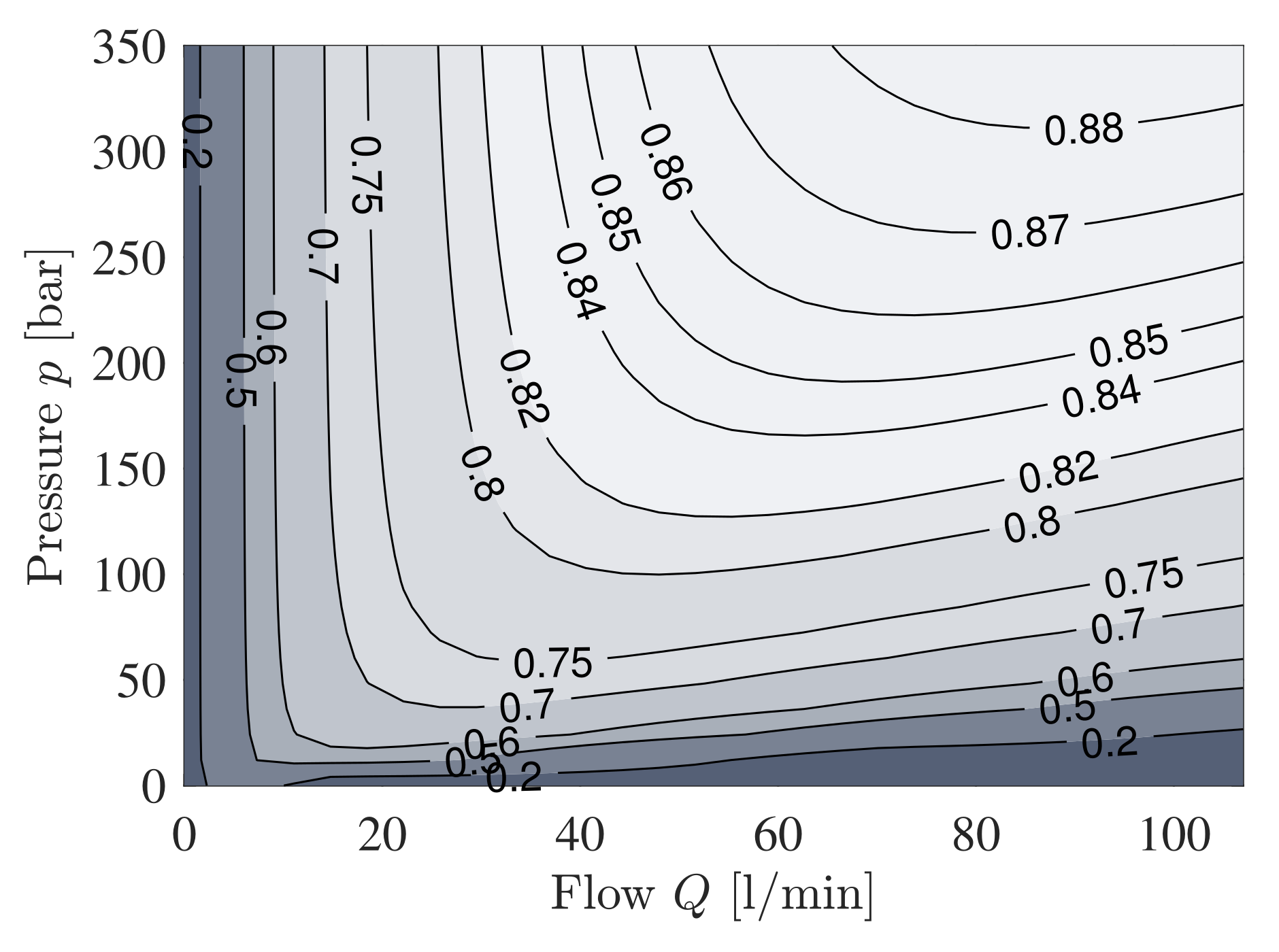
Figure 23.
Pump total efficiency as a function of pressure and flow with estimated parameters.
Figure 23.
Pump total efficiency as a function of pressure and flow with estimated parameters.
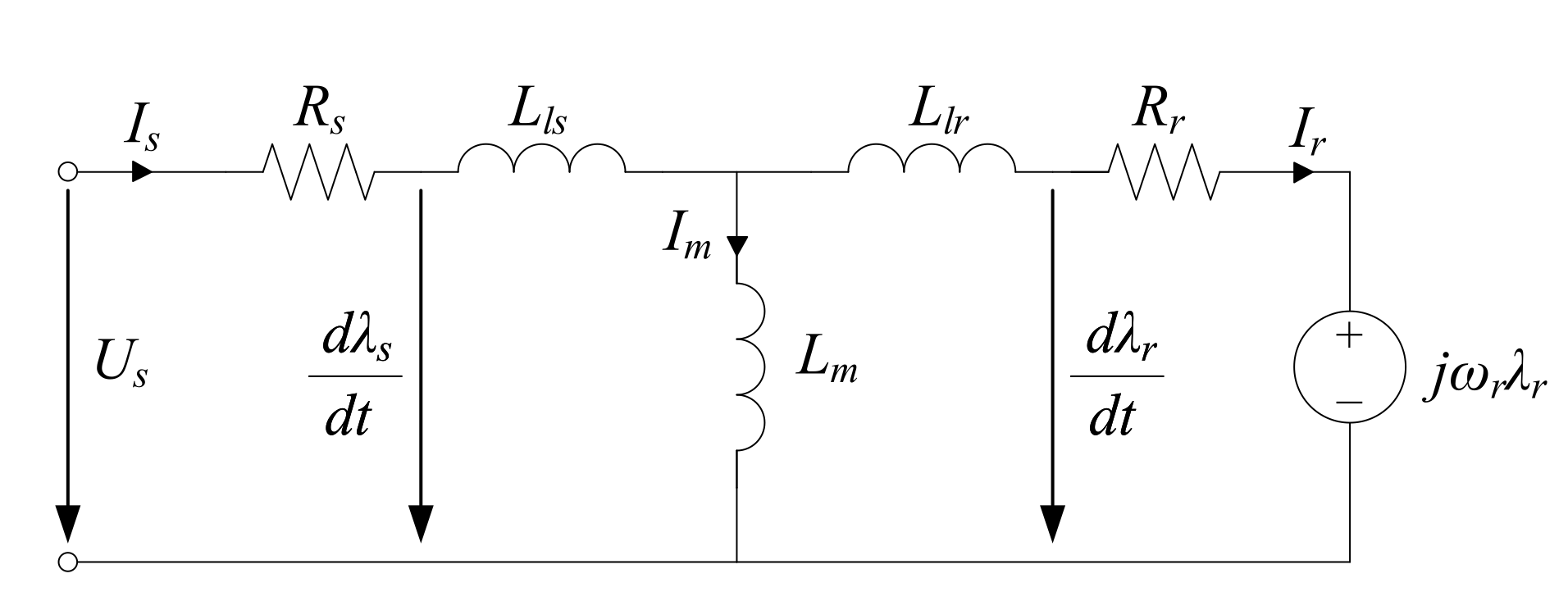
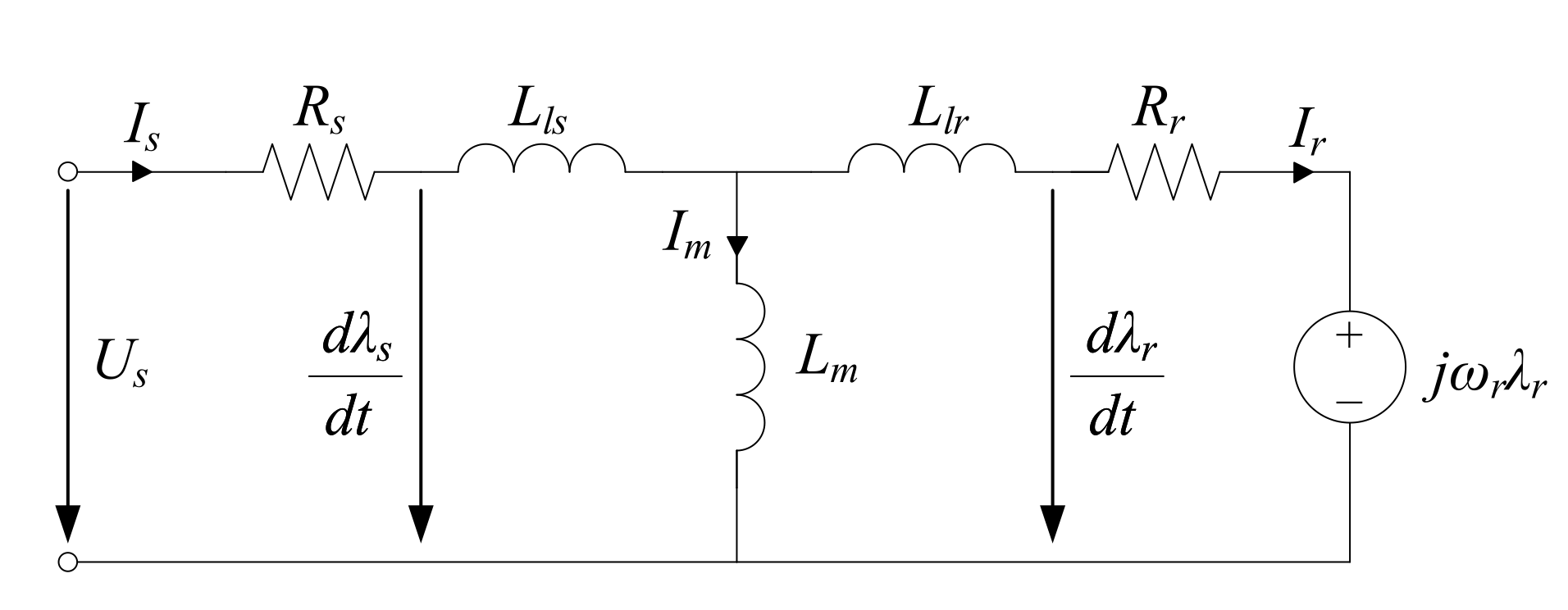
Figure 24.
Dynamic induction motor model.
Figure 24.
Dynamic induction motor model.
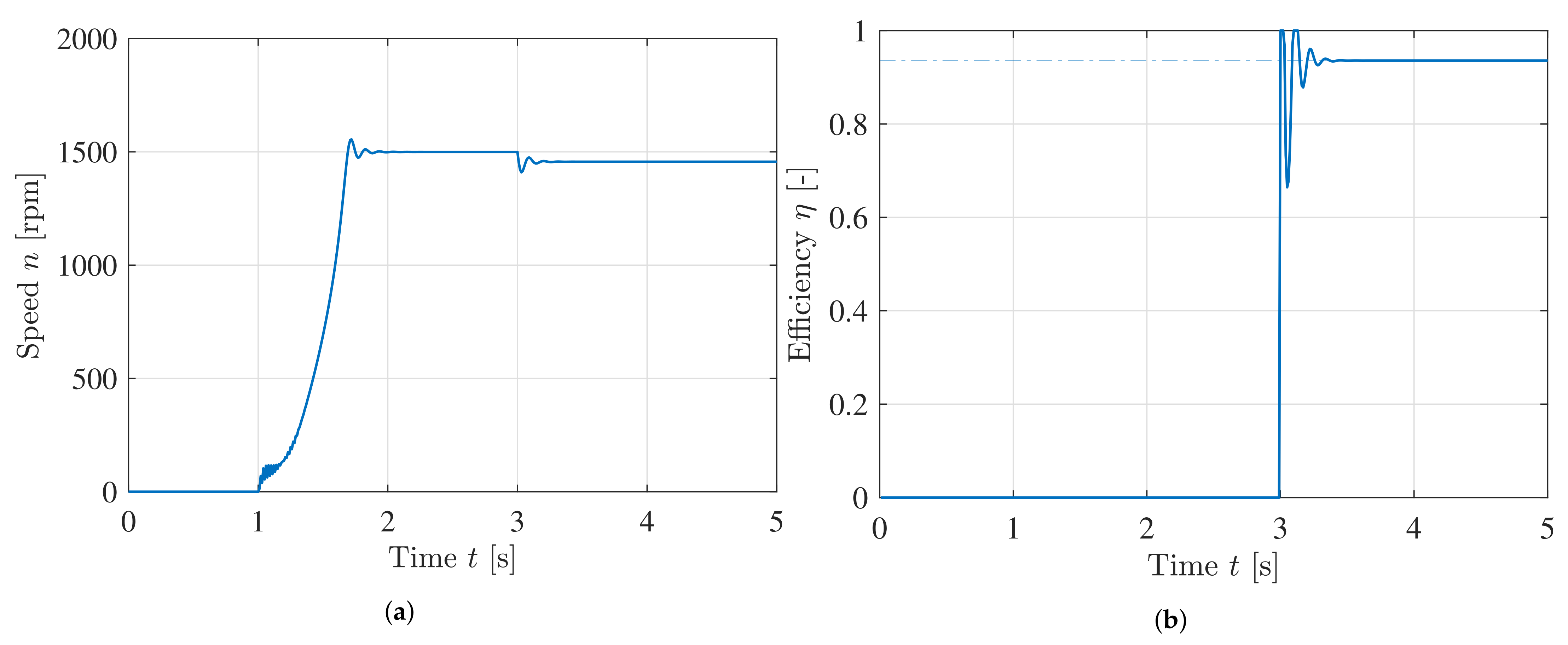
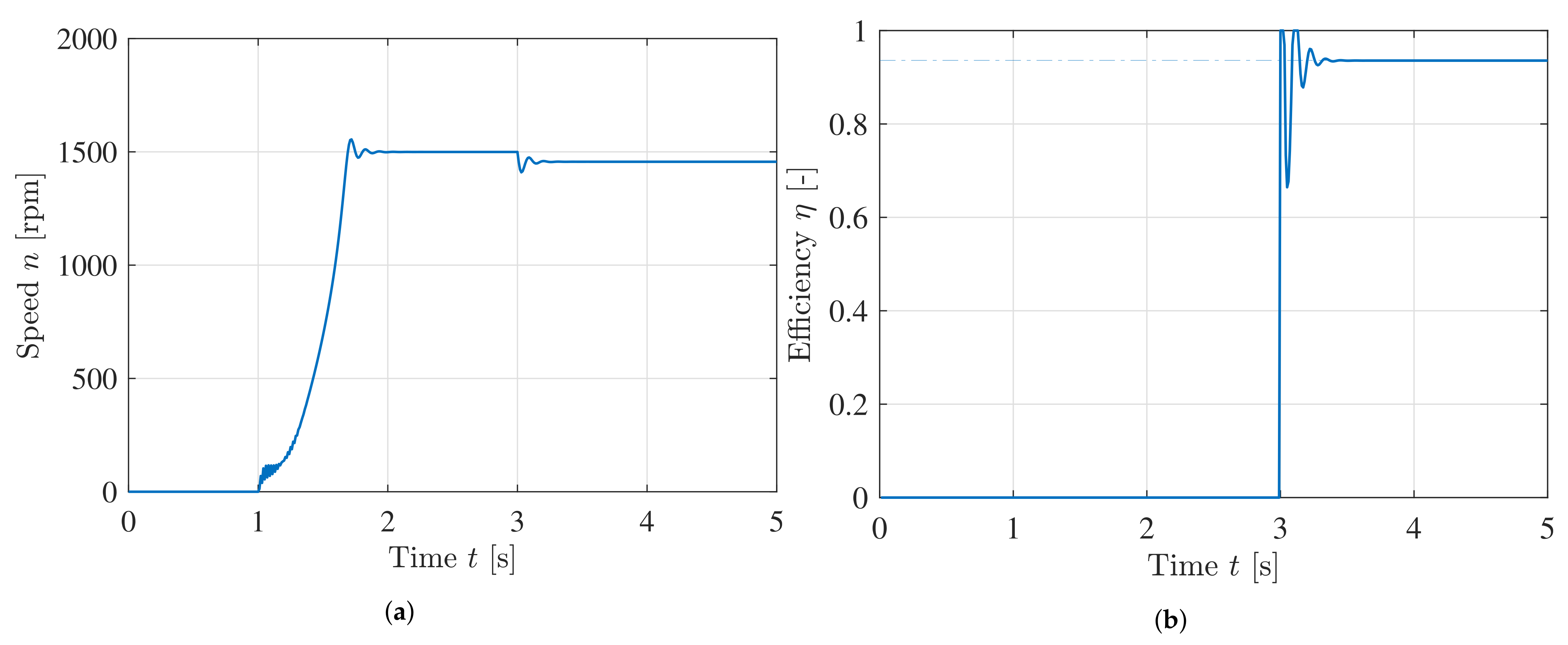
Figure 25.
Motor speed and efficiency during startup and full load. (a) Motor speed using the estimated parameters; (b) Motor efficiency using the estimated parameters (solid line) and motor data (dash-dotted).
Figure 25.
Motor speed and efficiency during startup and full load. (a) Motor speed using the estimated parameters; (b) Motor efficiency using the estimated parameters (solid line) and motor data (dash-dotted).
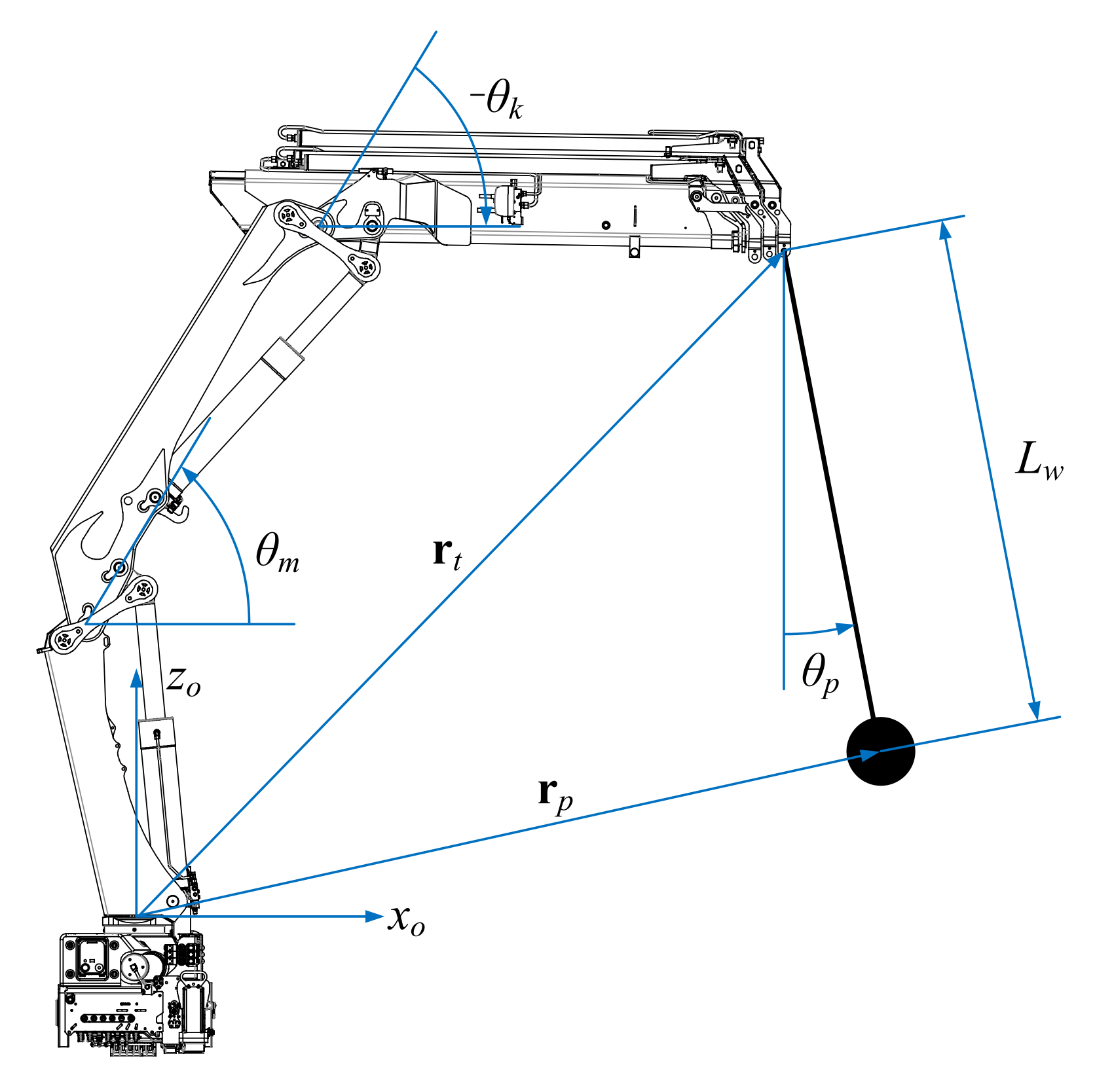
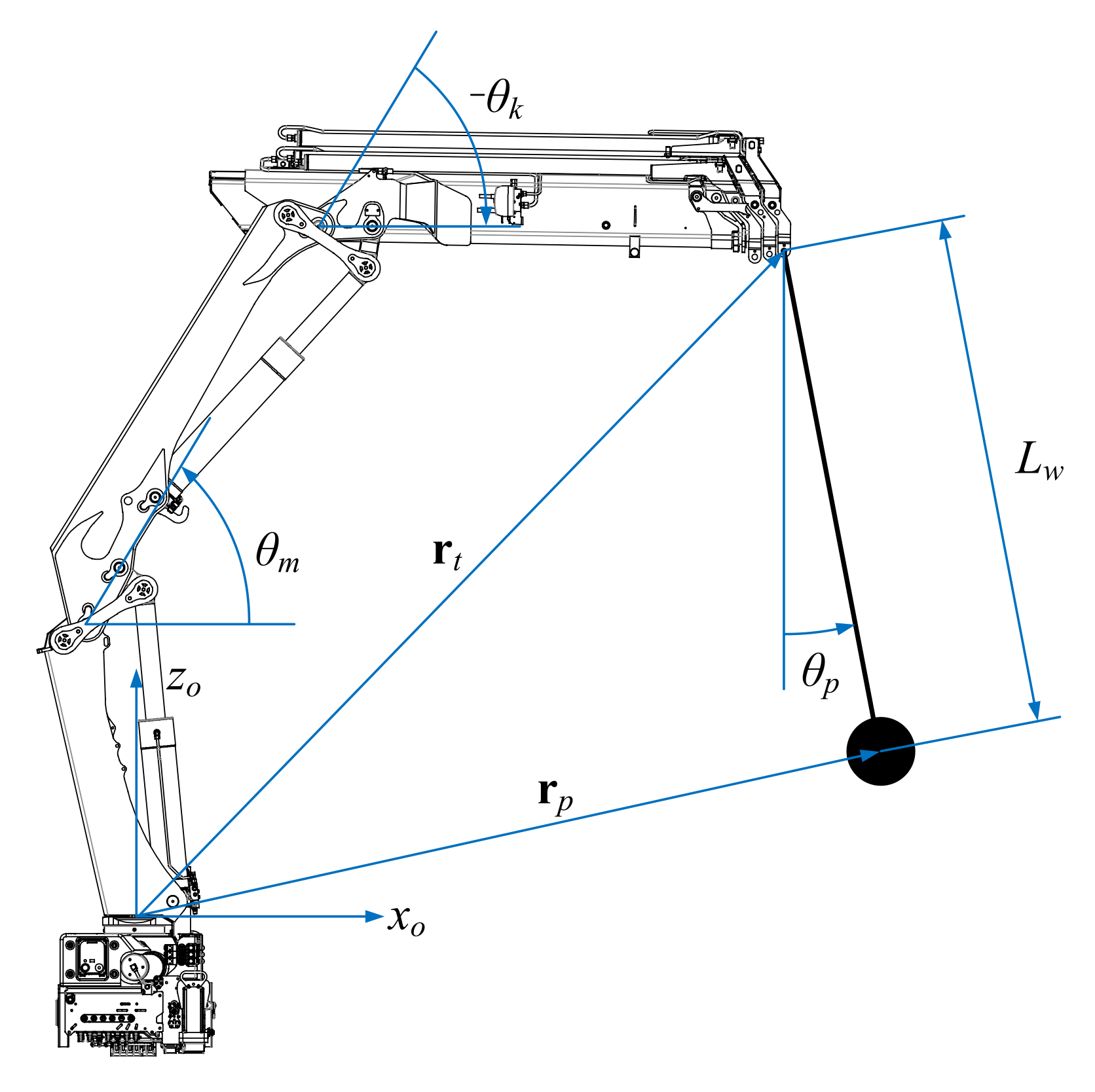
Figure 26.
Illustration of the HMF crane with hanging load.
Figure 26.
Illustration of the HMF crane with hanging load.
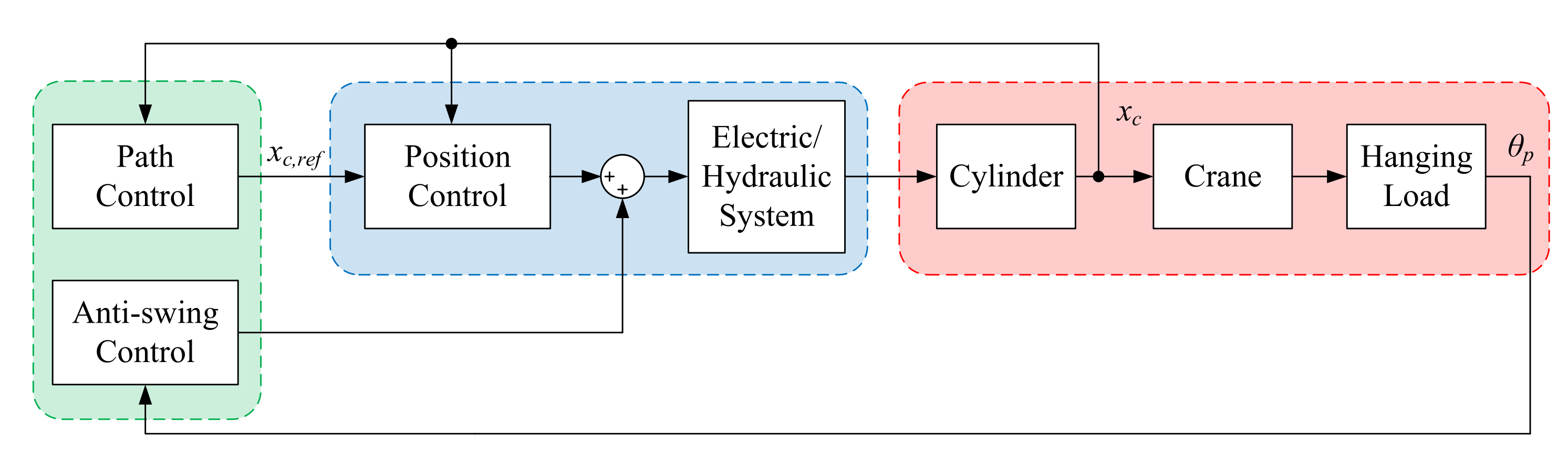
Figure 27.
Block diagram of the path control, anti-swing control, and crane.
Figure 27.
Block diagram of the path control, anti-swing control, and crane.
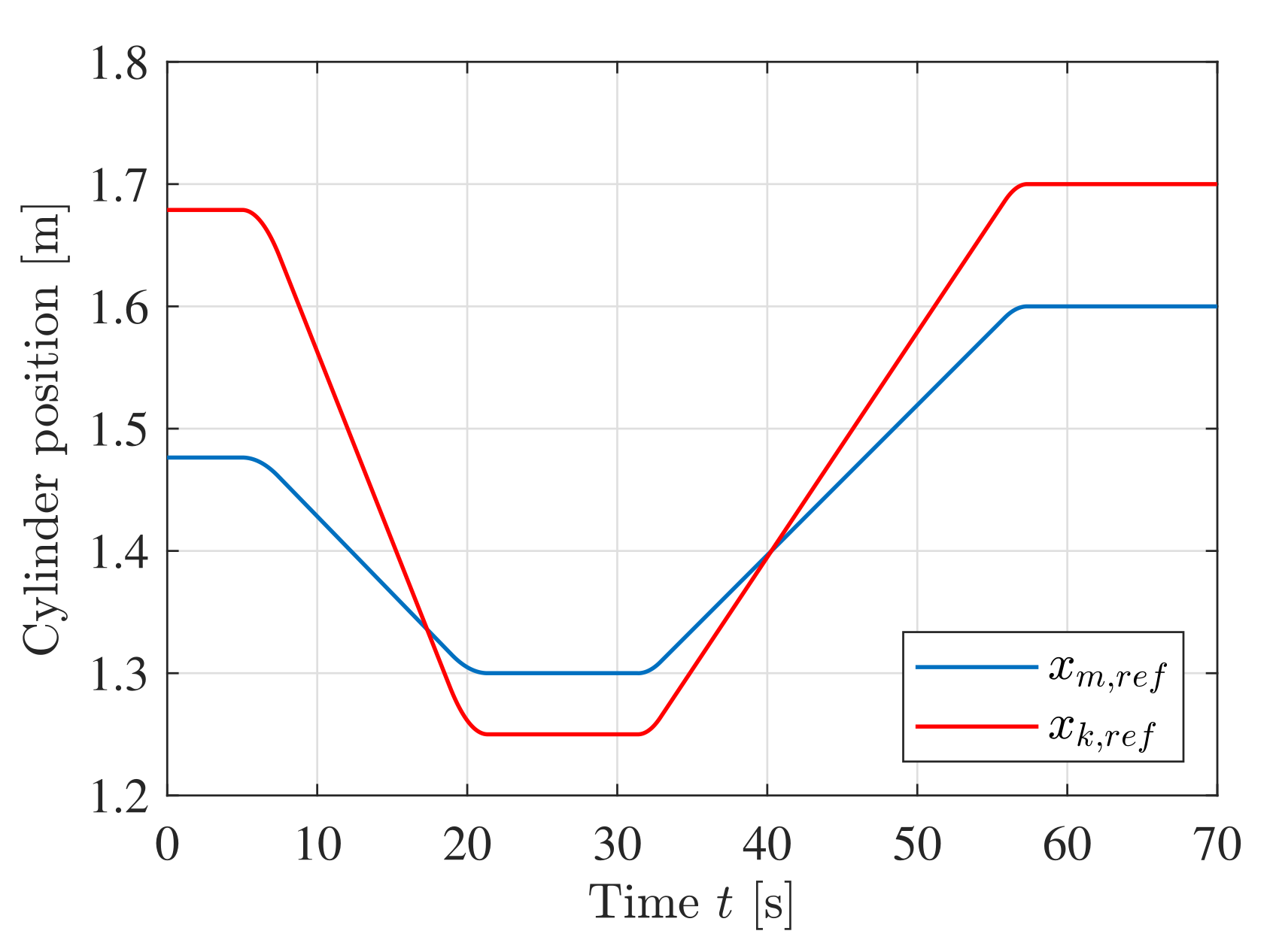
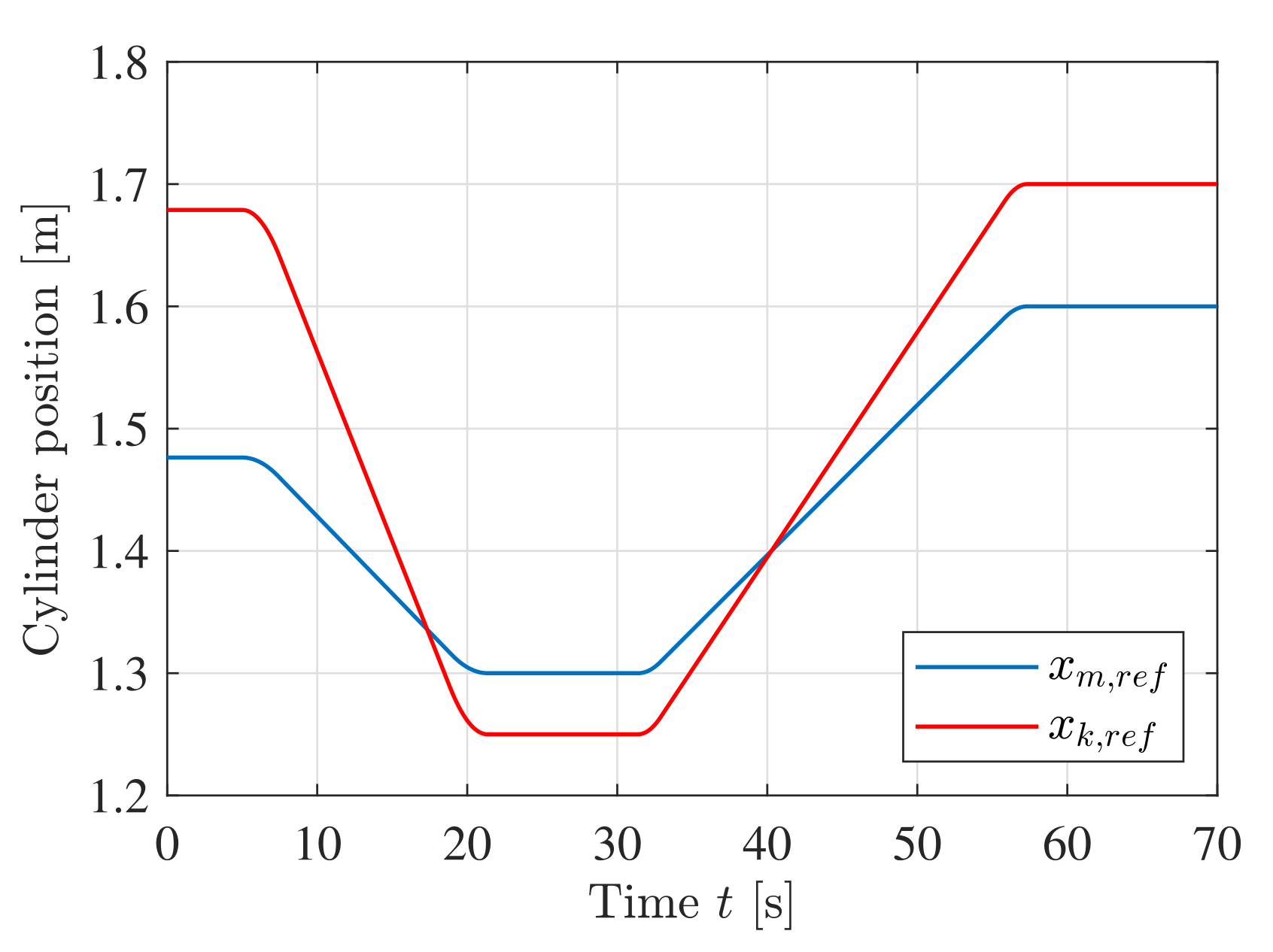
Figure 28.
Cylinder position reference during load case.
Figure 28.
Cylinder position reference during load case.
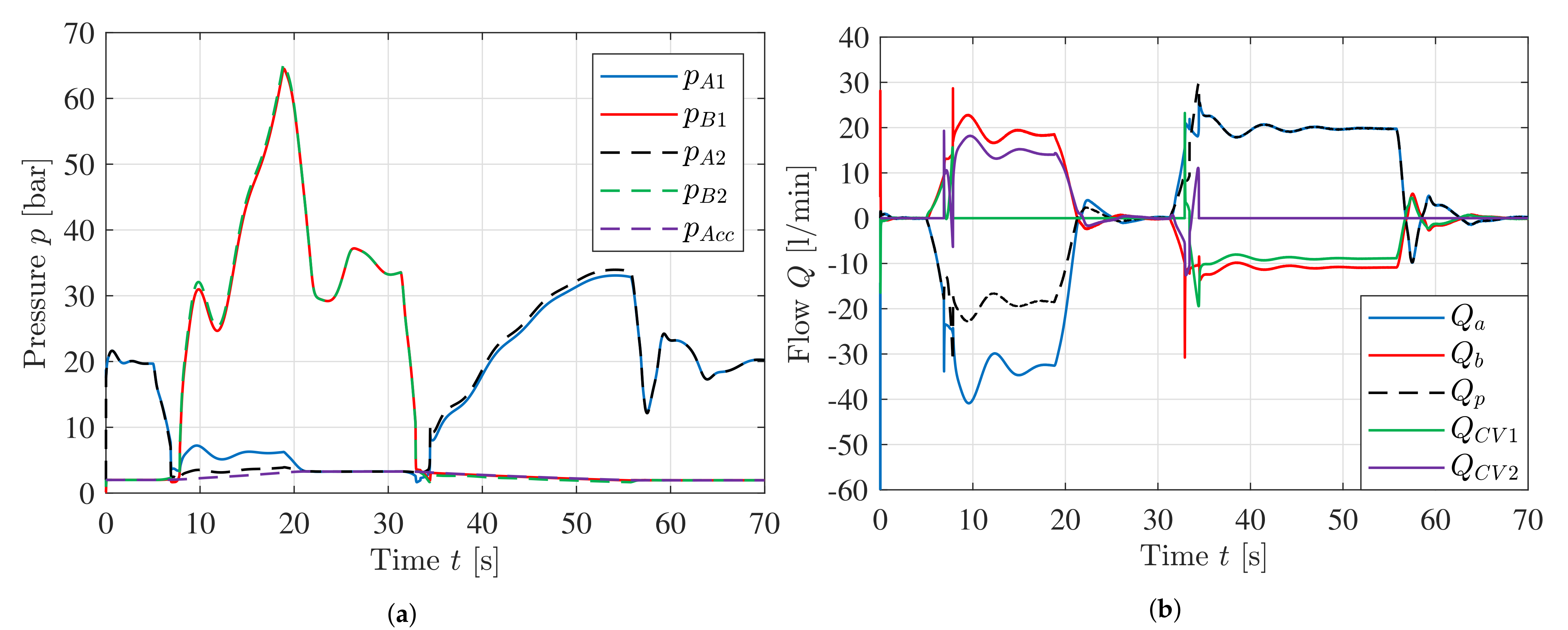
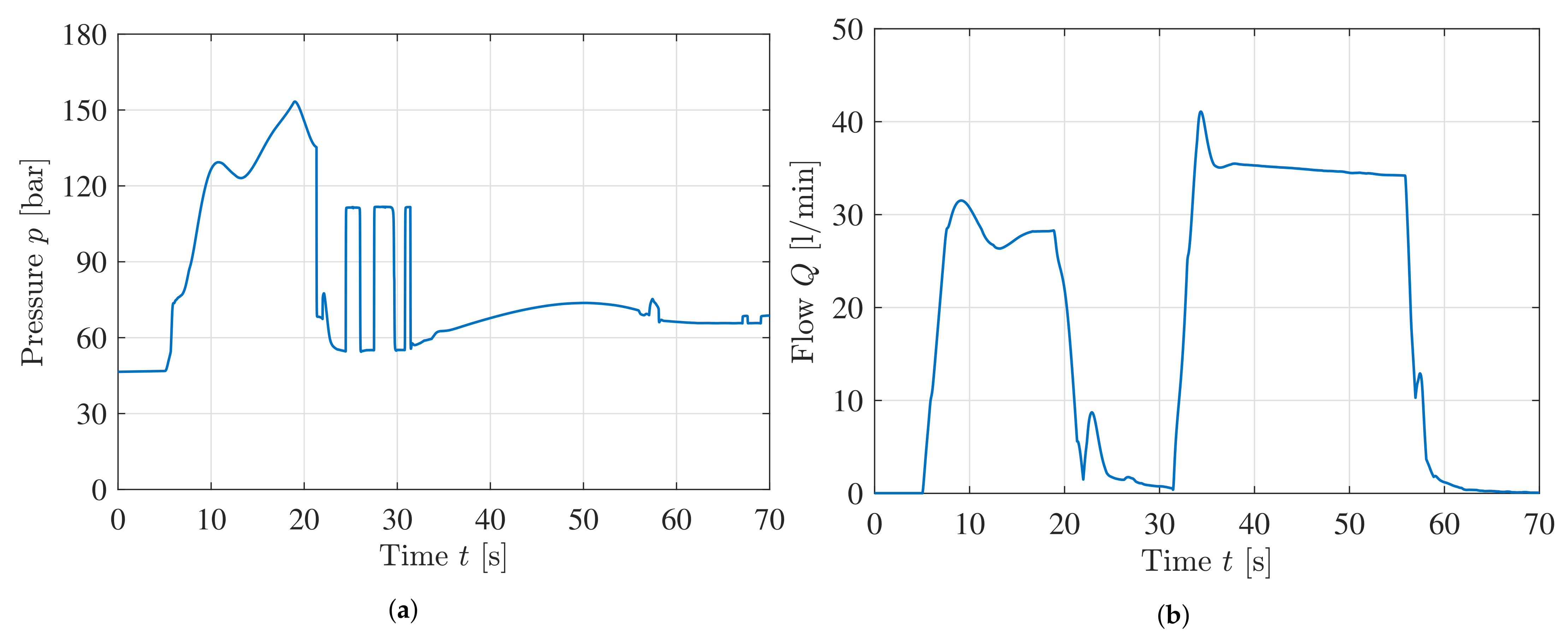
Figure 29.
Pump pressure and flow during motion with valve-controlled actuators. (a) Pump pressure; (b) Pump flow.
Figure 29.
Pump pressure and flow during motion with valve-controlled actuators. (a) Pump pressure; (b) Pump flow.
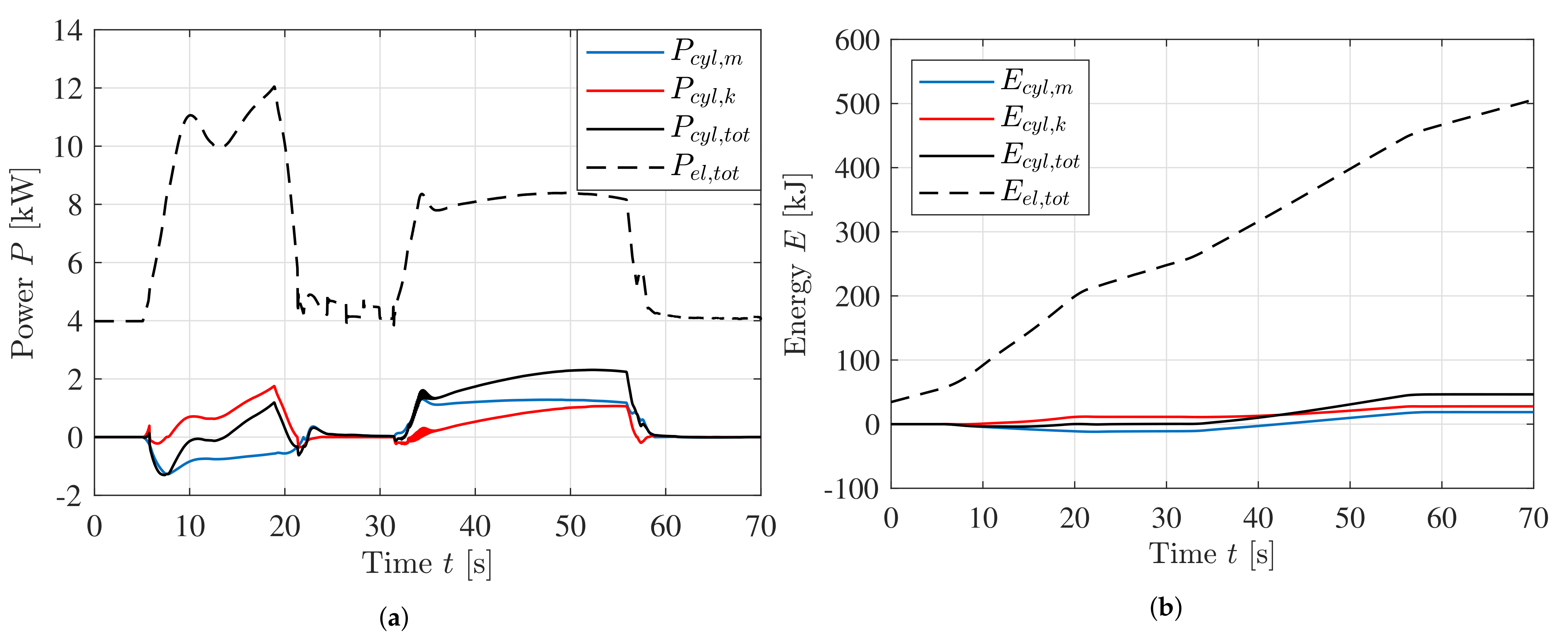
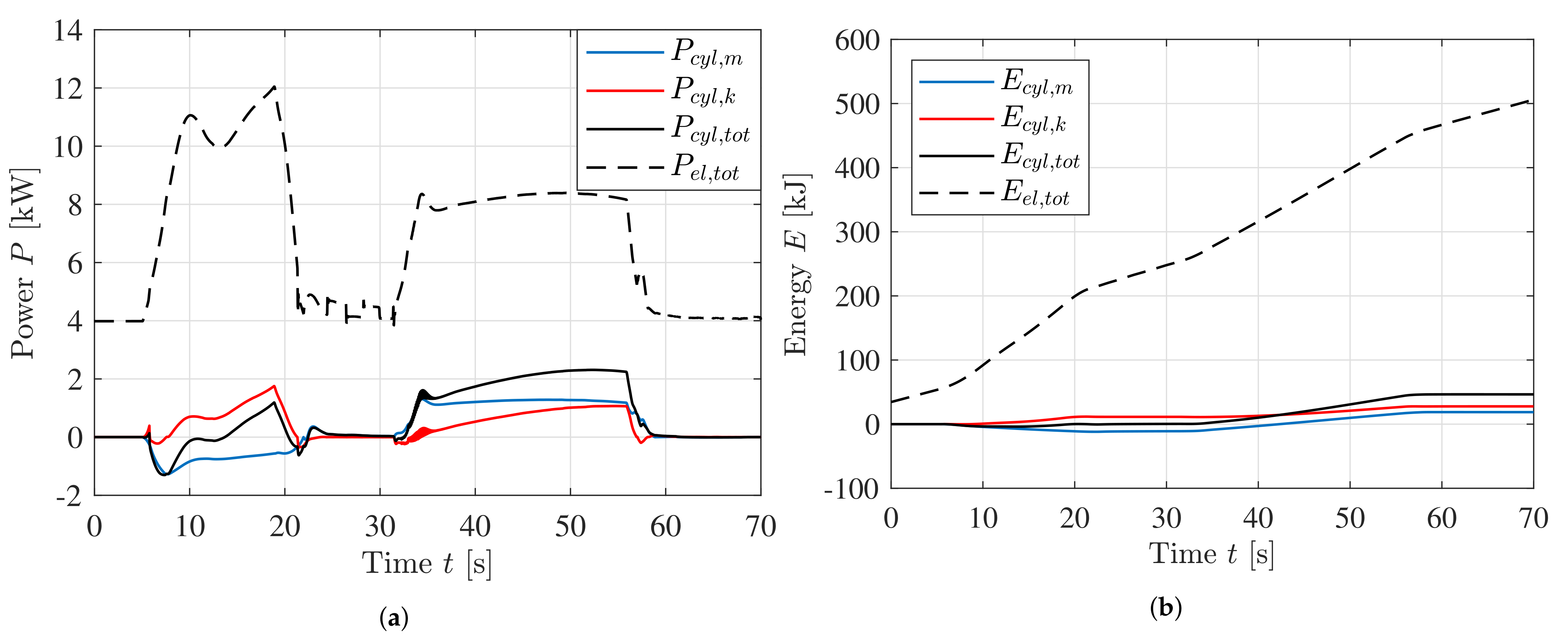
Figure 30.
Power and energy during motion with valve-controlled actuators. (a) Power from the grid and to the cylinders; (b) Consumed energy with valve-controlled actuators.
Figure 30.
Power and energy during motion with valve-controlled actuators. (a) Power from the grid and to the cylinders; (b) Consumed energy with valve-controlled actuators.
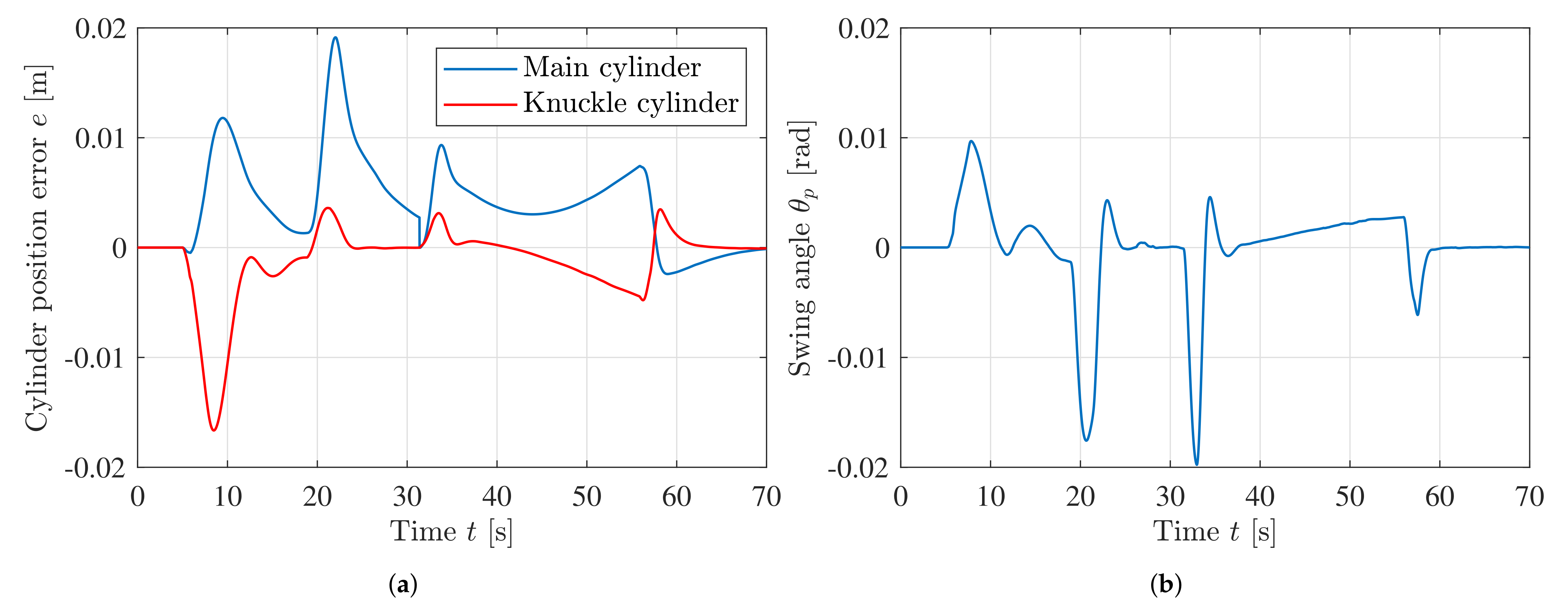
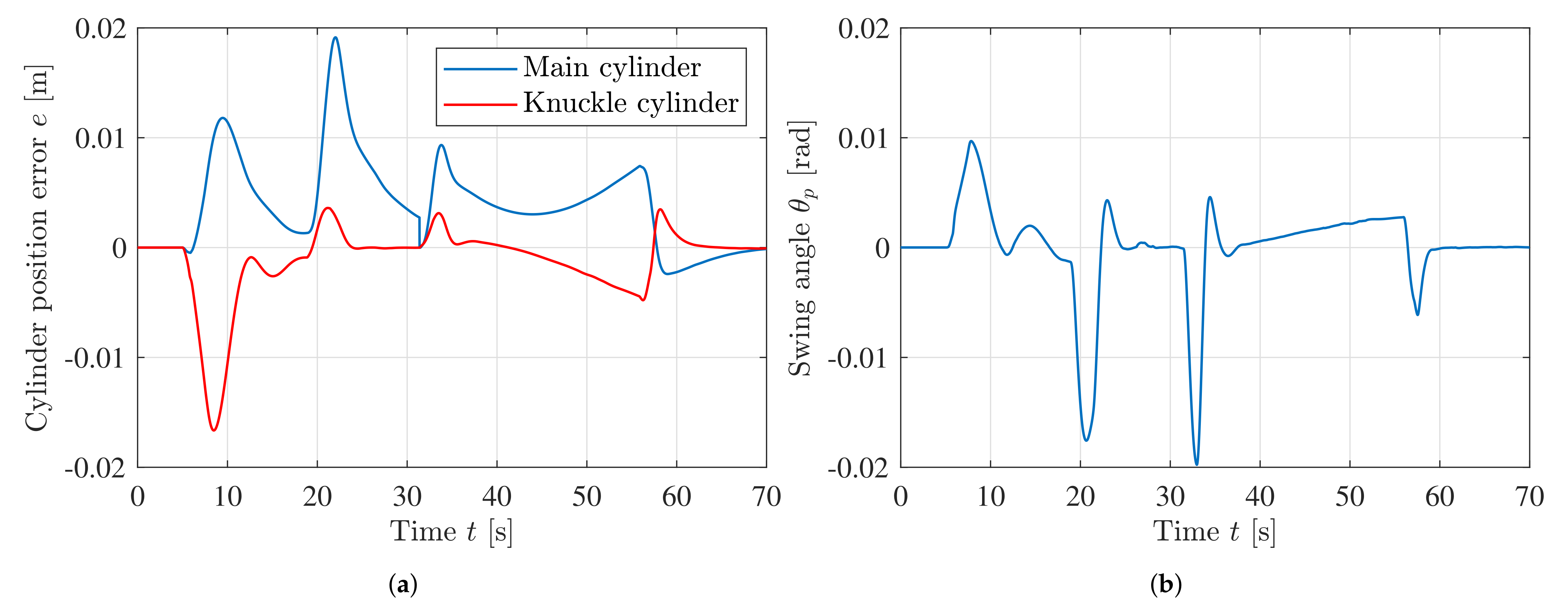
Figure 31.
Cylinder position error and swing angle during motion with valve-controlled actuators. (a) Cylinder position error; (b) Swing angle.
Figure 31.
Cylinder position error and swing angle during motion with valve-controlled actuators. (a) Cylinder position error; (b) Swing angle.
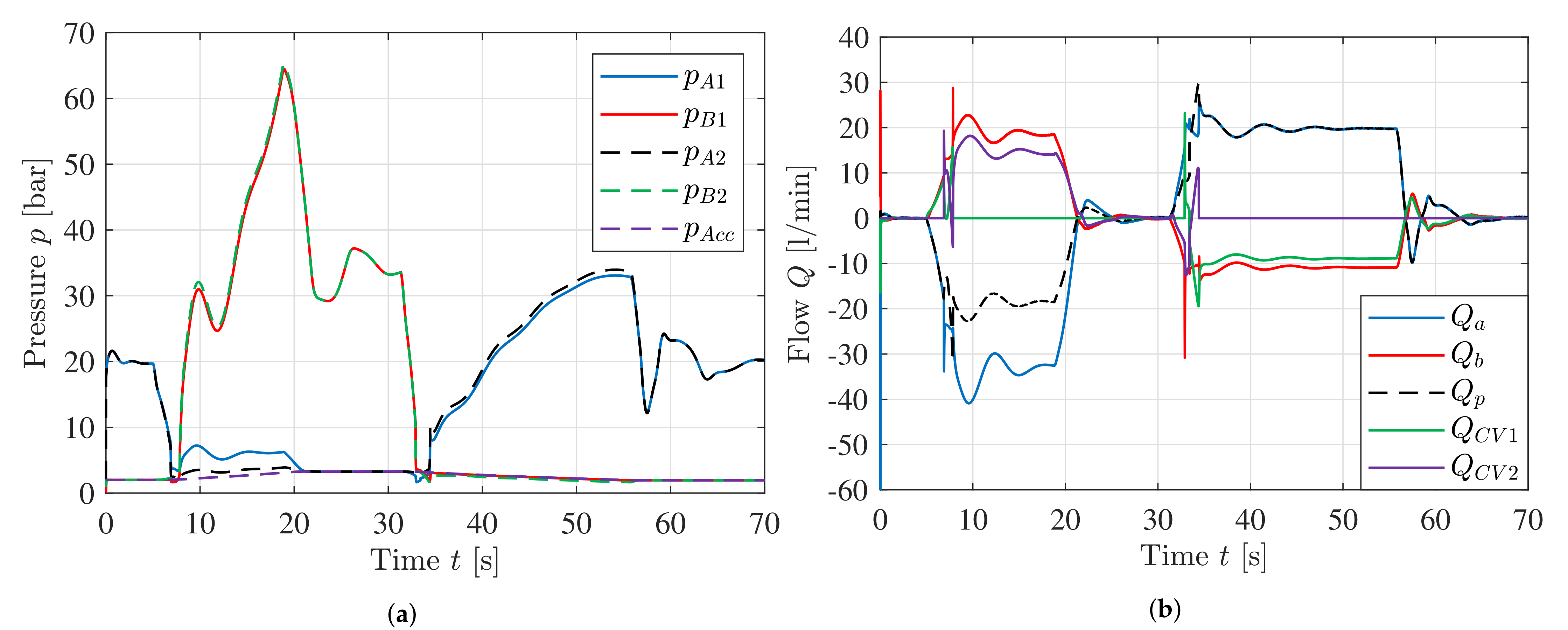
Figure 32.
Pressure and flow in the knuckle circuit with EHAs. (a) Pressure in knuckle circuit; (b) Flow in knuckle circuit.
Figure 32.
Pressure and flow in the knuckle circuit with EHAs. (a) Pressure in knuckle circuit; (b) Flow in knuckle circuit.
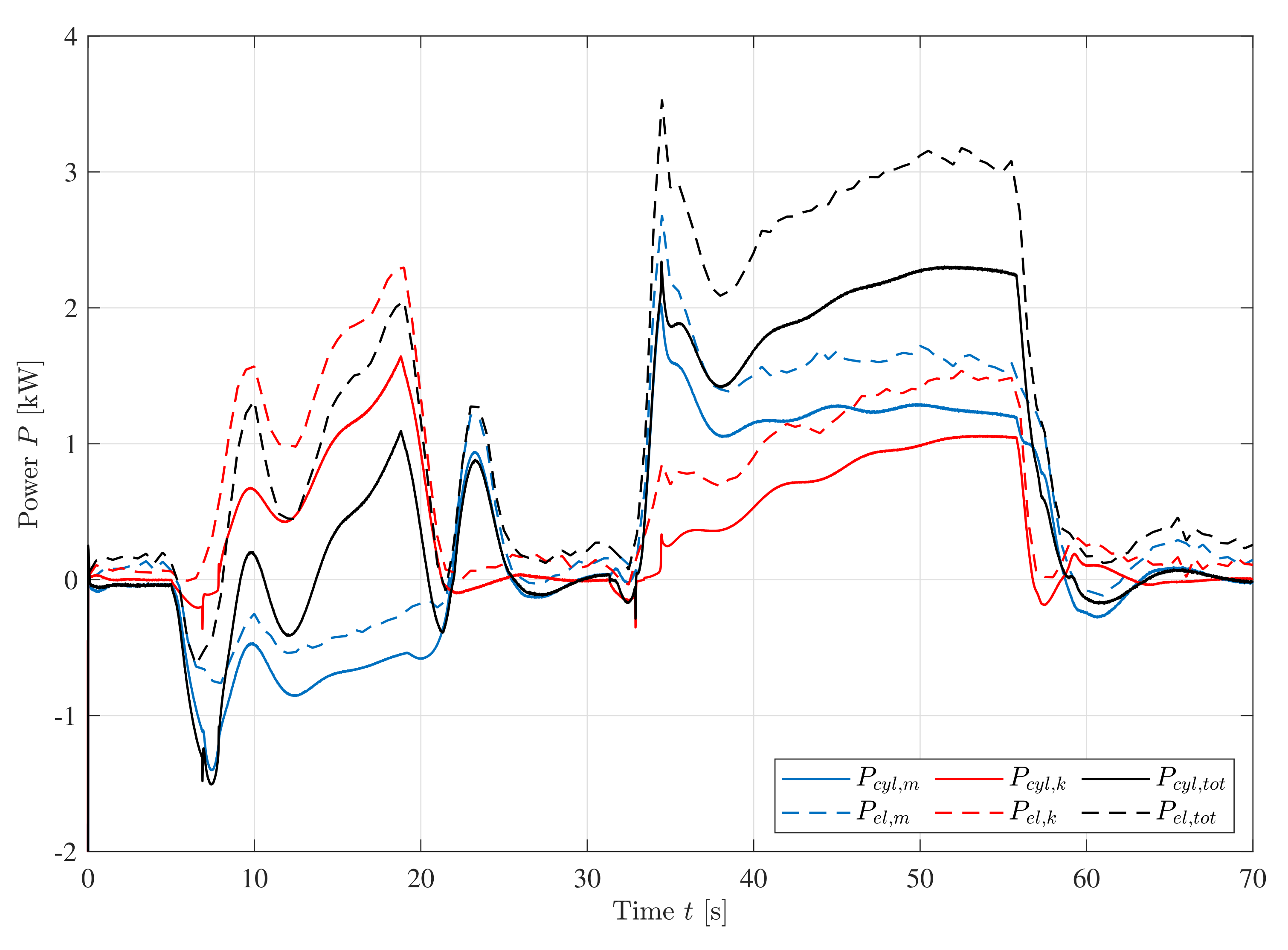
Figure 33.
Power from the grid (dashed) and power to the cylinders (solid) with EHAs.
Figure 33.
Power from the grid (dashed) and power to the cylinders (solid) with EHAs.
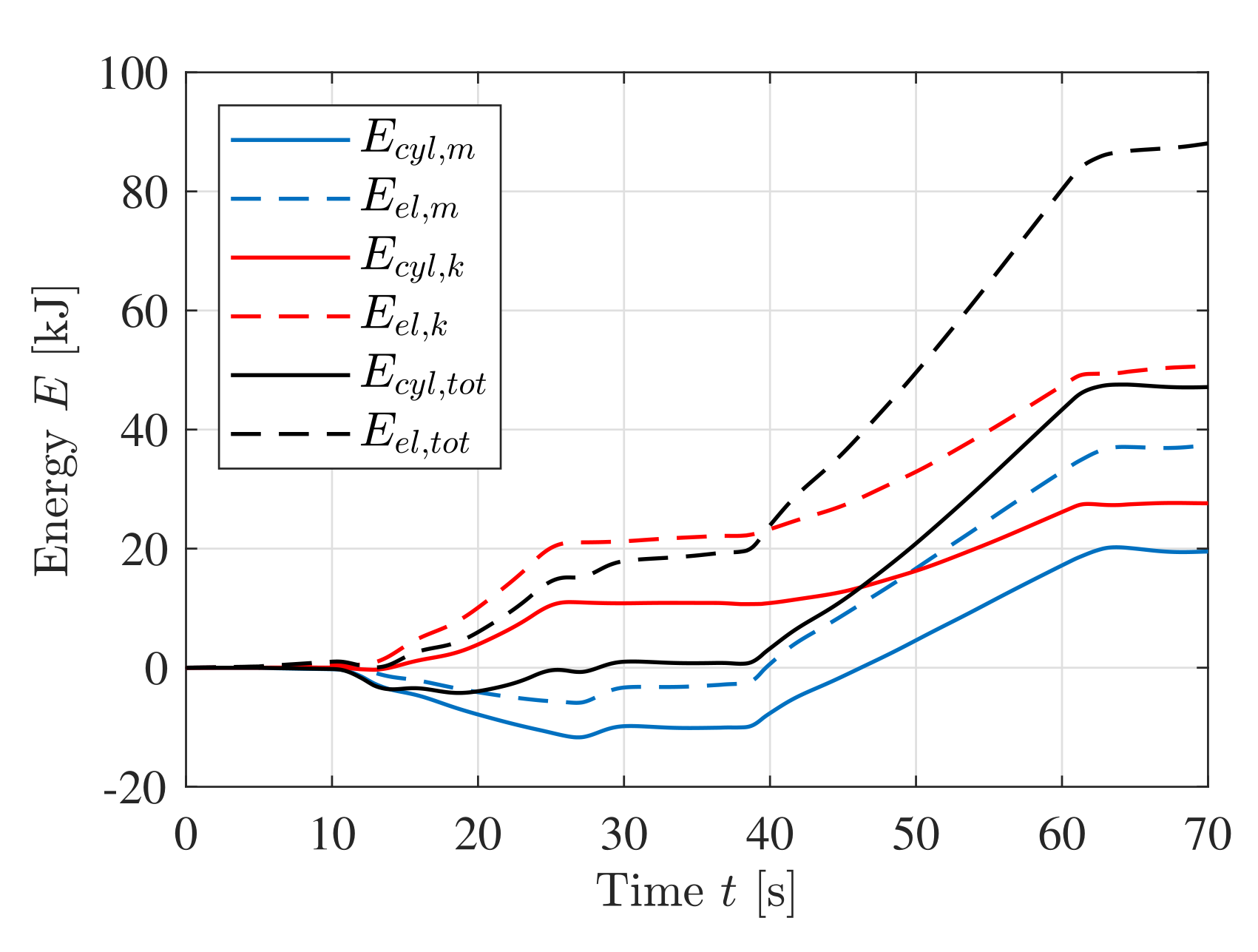
Figure 34.
Energy consumed during motion.
Figure 34.
Energy consumed during motion.
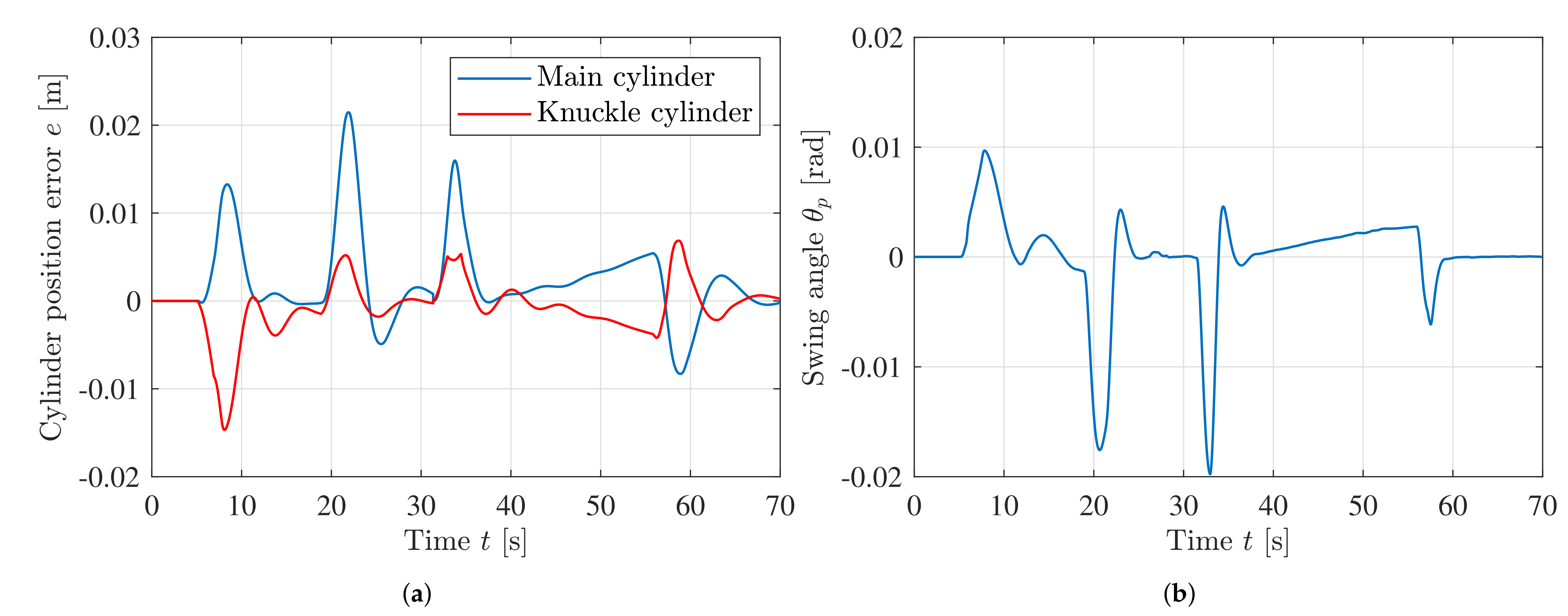
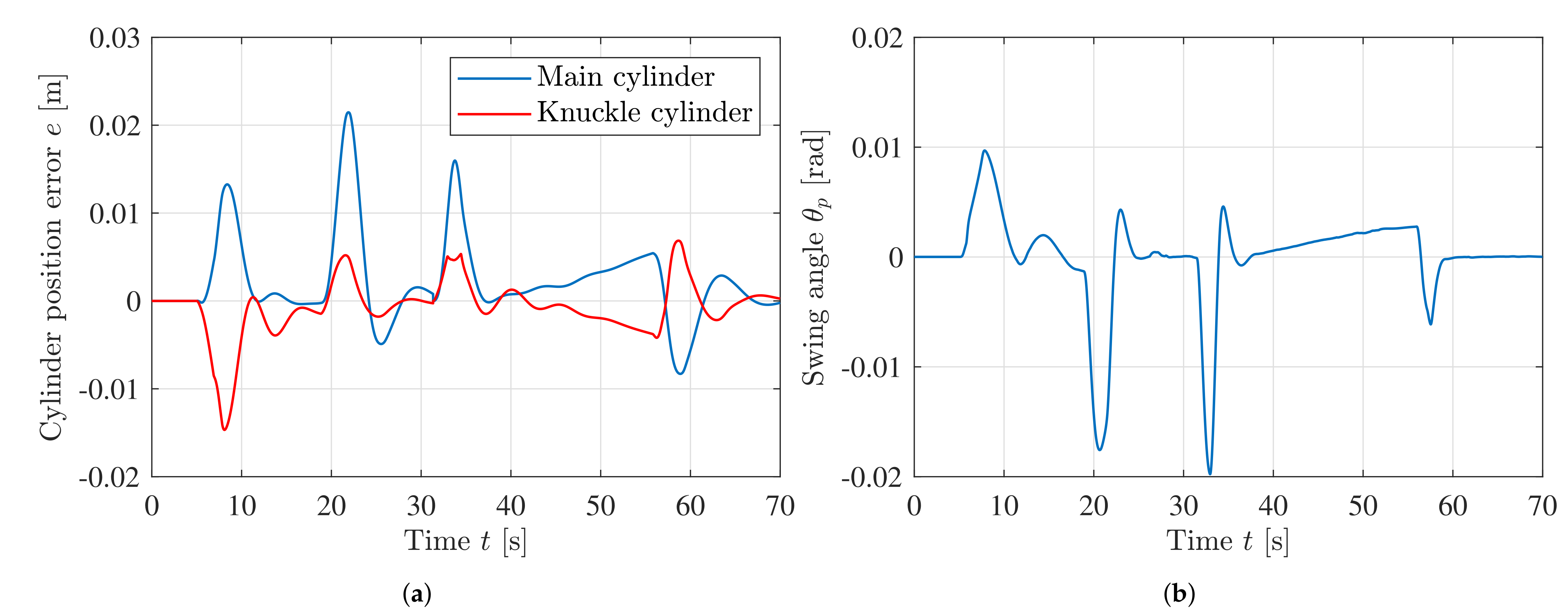
Figure 35.
Cylinder position error and swing angle during motion with EHAs. (a) Cylinder position error; (b) Swing angle.
Figure 35.
Cylinder position error and swing angle during motion with EHAs. (a) Cylinder position error; (b) Swing angle.
Table 1.
Requirements for the EHA.
Table 1.
Requirements for the EHA.
| Functional Requirement | Typical Solution |
|---|
| Passive load holding | Counterbalance valves, POCVs, locking valves |
| Overload handling | Shock valves, relief valves |
| Differential flow compensation | Mode switching valves, accumulator, multiple pumps |
| Four-quadrant operation | Closed circuit with bidirectional pump |
Table 2.
Cylinder data.
| Name | Parameter | Value |
|---|
| Main cylinder piston diameter | | 0.160 m |
| Main cylinder rod diameter | | 0.100 m |
| Main cylinder stroke | | 0.75 m |
| Knuckle cylinder piston diameter | | 0.150 m |
| Knuckle cylinder rod diameter | | 0.100 m |
| Knuckle cylinder stroke | | 0.85 m |
Table 3.
Servo drive parameters.
Table 3.
Servo drive parameters.
| Name | Parameter | Value |
|---|
| Proportional gain, speed loop | | 10 As/rad |
| Integral gain, speed loop | | 10 A/rad |
| Proportional gain, current loop | | 10 V/A |
| Integral gain, current loop | | 100 V/(A·s) |
| Controller sampling frequency | | 20 kHz |
| Inverter switching frequency | | 2 kHz |
| DC-bus voltage | | 565 V |
Table 4.
Servomotor data Beckhoff AM8064R at 400 VAC (565 VDC).
Table 4.
Servomotor data Beckhoff AM8064R at 400 VAC (565 VDC).
| Name | Parameter | Value |
|---|
| Standstill torque | | 49.6 Nm |
| Standstill current | | 30.8 A |
| Max torque | | 148 Nm |
| Max current | | 108 A |
| Rated torque | | 36.5 Nm |
| Rated current | | 24.4 A |
| Rated speed | | 3000 rpm |
| Rated power | | 11.5 kW |
| Torque constant | | 1.61 Nm/A |
| Line resistance | | 0.35 |
| Line inductance | | 3.40 mH |
| Friction torque | | 0.2 Nm |
| Rotor inertia | J | 38.6 kgcm |
| Pole pairs | | 5 |
| Thermal time constant | | 44 min |
Table 5.
Components of the hydraulic system shown in
Figure 8.
Table 5.
Components of the hydraulic system shown in
Figure 8.
| Component | Manufacturer | Model Number | Data |
|---|
| Servomotor (M) | Beckhoff | AM8064R | 11.5 kW |
| Hydraulic pump (P) | Bosch Rexroth | A10FZG018 | 18 cm/rev |
| Accumulator (ACC) | Bosch Rexroth | HAB20 | 18.1 L |
| Check valve (CV) | Sun Hydraulics | CXADXCN | 28 L/min |
| Pilot-operated check valve (POCV) | Sun Hydraulics | CKCBXCN | 57 L/min |
| Relief valve (RV) | Sun Hydraulics | RDDALCN | 95 L/min |
| 2/2 poppet valve (PV) | Parker Hannifin | DSH121CR | 90 L/min |
Table 6.
Simulation parameters.
Table 6.
Simulation parameters.
| Name | Parameter | Value |
|---|
| Proportional gain | | 5 s |
| Pressure feedback gain | | 0.001 m/(bar·s) |
| Pressure feedback bandwidth | | 5.32 rad/s |
| Load mass | m | 30,000 kg |
| Viscous friction | | 150 kNs/m |
| Coulomb friction | | 4 kN |
| Smoothing parameter | | 0.001 m/s |
Table 7.
Induction motor data ABB 3GBP202410 at 400 VAC 50 Hz.
Table 7.
Induction motor data ABB 3GBP202410 at 400 VAC 50 Hz.
| Name | Parameter | Value |
|---|
| Nominal power | | 30 kW |
| Nominal torque | | 193 Nm |
| Nominal speed | | 1483 rpm |
| Nominal current | | 54.8 A |
| Rotor inertia | J | 0.385 kgm |
| Power factor | | 0.84 |
| Efficiency | | 0.936 |
| Pole pairs | | 2 |
Table 8.
Performance comparison between valve-controlled system and electro-hydrostatic system.
Table 8.
Performance comparison between valve-controlled system and electro-hydrostatic system.
| Parameter | Valve-Controlled | Electro-Hydrostatic |
|---|
| Main cylinder error | 5.8 mm | 5.8 mm |
| Knuckle cylinder error | 5.4 mm | 3.3 mm |
| Swing angle | 4.3 mrad | 4.4 mrad |
| Energy consumed | 505 kJ | 88 kJ |










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}