
Electric Vehicles Charging Management Using Machine Learning Considering Fast Charging and Vehicle-to-Grid Operation




Abstract
:1. Introduction
- We present an EV charging management system that considers the use of conventional charging, fast charging and V2G technologies, with a high degree of robustness against the load data uncertainty that may occur with the input data of the ML system to ensure reliability and effectiveness.
- We conduct a performance assessment on the use of different ML techniques for managing the charging and routing of a fleet of EVs and utilize the highest performing ML algorithm as an optimization technique, as well as minimize load variance, power losses, voltage fluctuations and charging cost.
2. Related Work
2.1. Managed Charging of Electric Vehicles
2.2. Machine Learning Techniques
3. Machine Learning Techniques Theory
3.1. Decision Tree
3.2. Random Forest
3.3. Support Vector Machine
3.4. K-Nearest Neighbors
3.5. Deep Neural Networks
3.6. Long Short-Term Memory
4. Problem Formulation
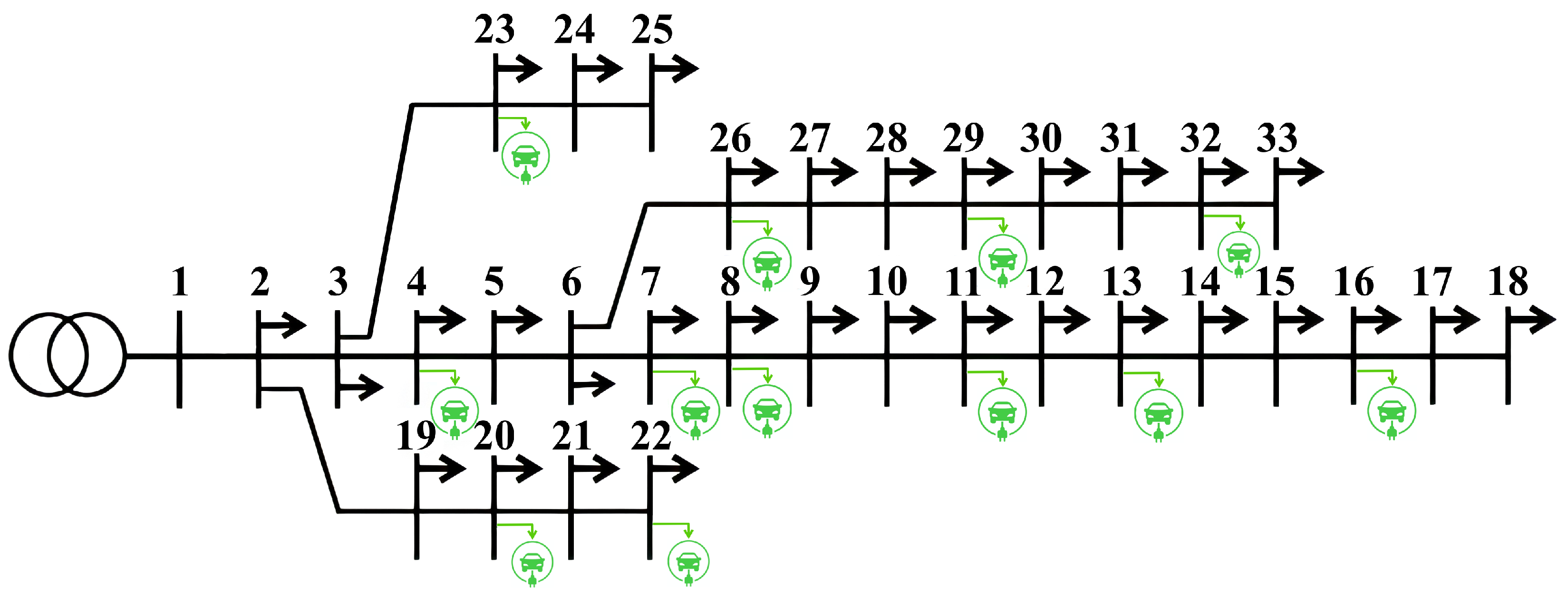
4.1. System Model and Parameters
4.2. Optimization of Load Variance
4.3. Optimization of Power Losses and Voltage Profile
4.4. Optimization of Charging Cost
5. Machine Learning for Electric Vehicles Fleet Management
5.1. Limitations of Machine Learning
5.2. Dataset Description
5.3. Machine Learning Model Parameters
- Month: A numeric integer between 1 and 12, depending on the month.
- Day: A numeric integer between 1 and 31, depending on the day of the month.
- Hour: A numeric integer between 0 and 23. A 24 h clock format is used.
- Minute: A numeric integer between 0 and 50. Values in the dataset are multiples of 10 as the time step is 10 min.
- Bus power Load: 12 parameters containing numeric values reflecting the power loads of every bus with a charging station in kW.
- Total power load: A numeric value of the power load of all the buses in kW.
- Charging station: A categorical data attribute, which is a class output of the model. Values are the numbers of the buses with charging stations.
- Charging speed: A categorical data attribute, which is a class output of the model. Values are high, normal and low.
6. Machine Learning Models: Results and Discussion
6.1. Charging Station Classification Results
6.2. Charging Speed Classification Results
7. Effect of Managed Charging of Electric Vehicles
7.1. Effect of LSTM Model on Load Curve
7.2. Effect of LSTM Model on Power Losses
7.3. Effect of LSTM Model on Voltage Profile
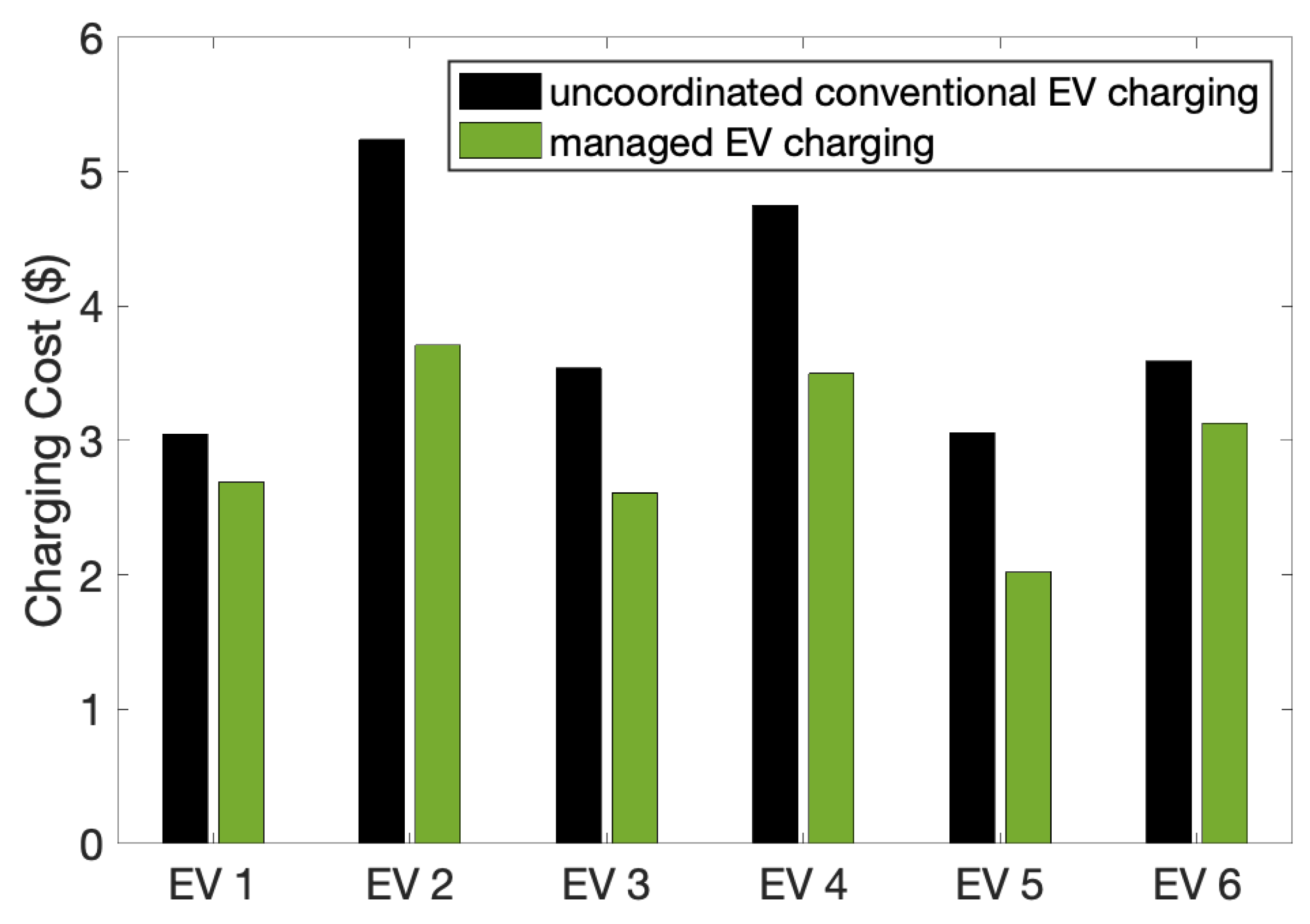
7.4. Effect of LSTM Model on Charging Cost
8. Effect of Load Data Uncertainty on the EV Management System
8.1. Effect of Load Data Uncertainty on ML Accuracies
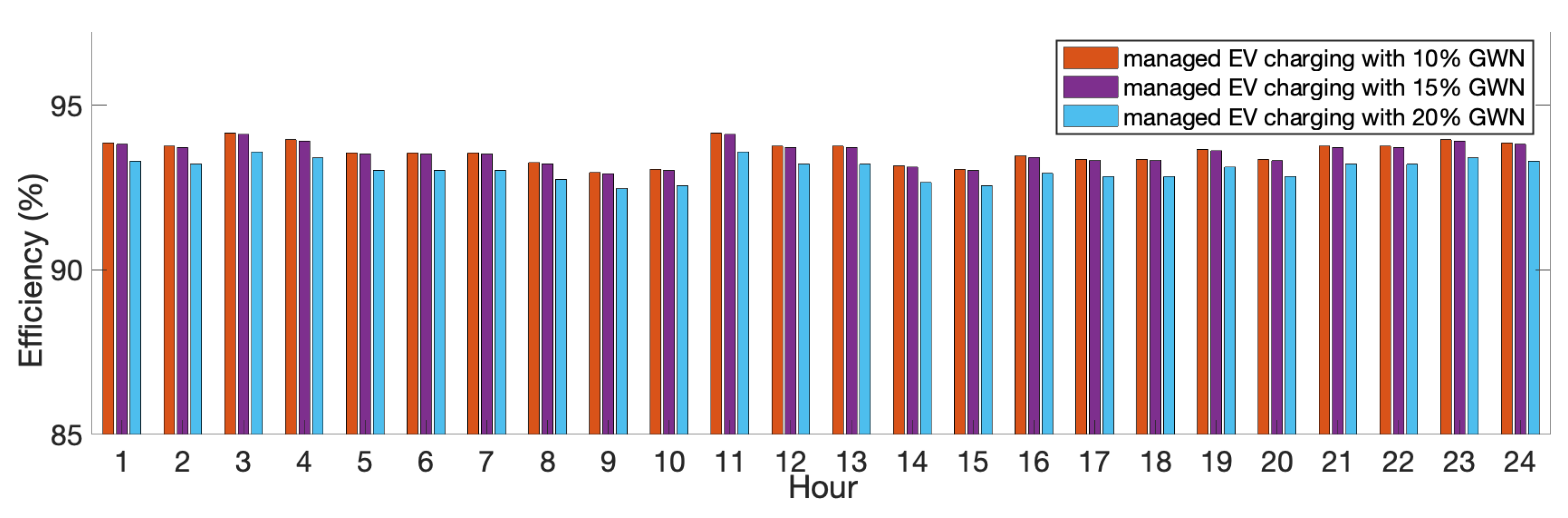
8.2. Effect of Load Data Uncertainty on Power System
9. Conclusions
- LSTM provides the highest accuracy (95%) for classifying charging speed and charging station and is the most robust to load data uncertainty with no change in its accuracy after introducing the load data uncertainty.
- The system successfully increases the power quality of the grid by minimizing the load variance and flattening the load curve, in addition to minimizing power losses and voltage fluctuations.
- The system decreases the mean power efficiency of the grid by only 3.1% compared to the base efficiency with no EV penetration.
10. Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| time interval in seconds | |
| T | total number of time intervals in a day |
| N | number of charging stations |
| B | number of buses |
| number of EVs in the n-th charging station | |
| time interval when the e-th EV is plugged into the n-th charging station | |
| time interval when the e-th EV is unplugged from the n-th charging station | |
| load of all the buses, excluding charging station loads, at the t-th time interval in kW | |
| operating power of the n-th charging station at the t-th time interval in kW function | |
| that determines the sign of | |
| maximum operating power of the distribution network at the t-th time interval in kW | |
| maximum power of operation of the n-th charging station at the t-th time interval in kW | |
| efficiency of the n-th charging station | |
| average power of distribution network in one day in kW | |
| energy required for charging the e-th EV | |
| plugged into the n-th charging station in kWh | |
| initial energy of the battery when the e-th EV is plugged into the n-th charging station | |
| in kWh | |
| final energy of the battery when the e-th EV is unplugged from the n-th charging | |
| station in kWh | |
| minimum state of charge that is permitted for the e-th EV plugged into the n-th | |
| charging station | |
| maximum state of charge that is permitted for the e-th EV plugged into the n-th | |
| charging station | |
| battery capacity of the e-th EV plugged into the n-th charging station in kWh | |
| current in the line between the b-th and ()-th buses at the t-th time interval | |
| resistance in the line between the b-th and ()-th buses | |
| electricity cost at the t-th time interval per kWh |
References
- Global EV Outlook 2020. International Energy Agency (IEA). 2020. Available online: https://www.iea.org/reports/global-ev-outlook-2020 (accessed on 14 July 2020).
- The Global Electric Vehicle Market In 2019—Virta. Virta.global. 2020. Available online: https://www.virta.global/global-electric-vehicle-market (accessed on 31 May 2020).
- ElMenshawy, M.; Massoud, A. Modular Isolated DC-DC Converters for Ultra-Fast EV Chargers: A Generalized Modeling and Control Approach. Energies 2020, 13, 2540. [Google Scholar] [CrossRef]
- ElMenshawy, M.; Massoud, A. Hybrid Multimodule DC-DC Converters for Ultrafast Electric Vehicle Chargers. Energies 2020, 13, 4949. [Google Scholar] [CrossRef]
- Wróblewski, P.; Drożdż, W.; Lewicki, W.; Miązek, P. Methodology for Assessing the Impact of Aperiodic Phenomena on the Energy Balance of Propulsion Engines in Vehicle Electromobility Systems for Given Areas. Energies 2021, 14, 2314. [Google Scholar] [CrossRef]
- Wróblewski, P.; Kupiec, J.; Drożdż, W.; Lewicki, W.; Jaworski, J. The Economic Aspect of Using Different Plug-in Hybrid Driving Techniques in Urban Conditions. Energies 2021, 14, 3543. [Google Scholar] [CrossRef]
- Korosec, K. Apple Maps Gets Electric Vehicle Routing to Find EV Chargers. Techcrunch.com. 2020. Available online: https://techcrunch.com/2020/06/22/apple-maps-gets-electric-vehicle-routing-to-find-ev-chargers (accessed on 25 June 2020).
- Clement-Nyns, K.; Haesen, E.; Driesen, J. The Impact of Charging Plug-In Hybrid Electric Vehicles on a Residential Distribution Grid. IEEE Trans. Power Syst. 2010, 25, 371–380. [Google Scholar] [CrossRef] [Green Version]
- Karmaker, A.K.; Roy, S.; Ahmed, M.R. Analysis of the Impact of Electric Vehicle Charging Station on Power Quality Issues. In Proceedings of the 2019 International Conference on Electrical, Computer and Communication Engineering (ECCE), Cox’s Bazar, Bangladesh, 7–9 February 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Yilmaz, M.; Krein, P.T. Review of the Impact of Vehicle-to-Grid Technologies on Distribution Systems and Utility Interfaces. IEEE Trans. Power Electron. 2013, 28, 5673–5689. [Google Scholar] [CrossRef]
- Habib, S.; Kamran, M.; Rashid, U. Impact analysis of vehicle-to-grid technology and charging strategies of electric vehicles on distribution networks—A review. J. Power Sources 2014, 277, 205–214. [Google Scholar] [CrossRef]
- Lunz, B.; Yan, Z.; Gerschler, J.; Sauer, D. Influence of plug-in hybrid electric vehicle charging strategies on charging and battery degradation costs. Energy Policy 2012, 46, 511–519. [Google Scholar] [CrossRef]
- Clairand, J.; Rodríguez-García, J.; Álvarez-Bel, C. Smart Charging for Electric Vehicle Aggregators Considering Users’ Preferences. IEEE Access 2018, 6, 54624–54635. [Google Scholar] [CrossRef]
- Clairand, J.; Rodríguez-García, J.; Álvarez-Bel, C. Electric Vehicle Charging Strategy for Isolated Systems with High Penetration of Renewable Generation. Energies 2018, 11, 3188. [Google Scholar] [CrossRef] [Green Version]
- Fanti, M.P.; Mangini, A.M.; Roccotelli, M.; Ukovich, W. Optimal energy management integrating renewable energy, energy storage systems and electric vehicles. In Proceedings of the 2017 IEEE 14th International Conference on Networking, Sensing and Control (ICNSC), Calabria, Italy, 16–18 May 2017; pp. 519–524. [Google Scholar] [CrossRef]
- Amer, A.; Shaban, K.; Gaouda, A.; Massoud, A. Home Energy Management System Embedded with a Multi-Objective Demand Response Optimization Model to Benefit Customers and Operators. Energies 2021, 14, 257. [Google Scholar] [CrossRef]
- Sortomme, E.; Hindi, M.M.; MacPherson, S.D.J.; Venkata, S.S. Coordinated Charging of Plug-In Hybrid Electric Vehicles to Minimize Distribution System Losses. IEEE Trans. Smart Grid 2011, 2, 198–205. [Google Scholar] [CrossRef]
- Deilami, S.; Masoum, A.S.; Moses, P.S.; Masoum, M.A.S. Real-Time Coordination of Plug-In Electric Vehicle Charging in Smart Grids to Minimize Power Losses and Improve Voltage Profile. IEEE Trans. Smart Grid 2011, 2, 456–467. [Google Scholar] [CrossRef]
- Jian, L.; Xue, H.; Xu, G.; Zhu, X.; Zhao, D.; Shao, Z.Y. Regulated Charging of Plug-in Hybrid Electric Vehicles for Minimizing Load Variance in Household Smart Microgrid. IEEE Trans. Ind. Electron. 2013, 60, 3218–3226. [Google Scholar] [CrossRef]
- Masoum, A.S.; Deilami, S.; Moses, P.S.; Masoum, M.A.S.; Abu-Siada, A. Smart load management of plug-in electric vehicles in distribution and residential networks with charging stations for peak shaving and loss minimisation considering voltage regulation. IET Gener. Transm. Distrib. 2011, 5, 877–888. [Google Scholar] [CrossRef]
- Ma, Z.; Callaway, D.S.; Hiskens, I.A. Decentralized Charging Control of Large Populations of Plug-in Electric Vehicles. IEEE Trans. Control. Syst. Technol. 2013, 21, 67–78. [Google Scholar] [CrossRef]
- Iacobucci, R.; McLellan, B.; Tezuka, T. Optimization of shared autonomous electric vehicles operations with charge scheduling and vehicle-to-grid. Transp. Res. Part C Emerg. Technol. 2019, 100, 34–52. [Google Scholar] [CrossRef]
- Liu, Z.; Wu, Q.; Huang, S.; Wang, L.; Shahidehpour, M.; Xue, Y. Optimal Day-Ahead Charging Scheduling of Electric Vehicles Through an Aggregative Game Model. IEEE Trans. Smart Grid 2018, 9, 5173–5184. [Google Scholar] [CrossRef] [Green Version]
- Rezaei, A.; Burl, J.B.; Rezaei, M.; Zhou, B. Catch Energy Saving Opportunity in Charge-Depletion Mode, a Real-Time Controller for Plug-In Hybrid Electric Vehicles. IEEE Trans. Veh. Technol. 2018, 67, 11234–11237. [Google Scholar] [CrossRef]
- Wei, Z.; Li, Y.; Cai, L. Electric Vehicle Charging Scheme for a Park-and-Charge System Considering Battery Degradation Costs. IEEE Trans. Intell. Veh. 2018, 3, 361–373. [Google Scholar] [CrossRef]
- Chaudhari, K.; Kandasamy, N.K.; Krishnan, A.; Ukil, A.; Gooi, H.B. Agent-Based Aggregated Behavior Modeling for Electric Vehicle Charging Load. IEEE Trans. Ind. Inform. 2019, 15, 856–868. [Google Scholar] [CrossRef]
- Azizipanah-Abarghooee, R.; Terzija, V.; Golestaneh, F.; Roosta, A. Multiobjective Dynamic Optimal Power Flow Considering Fuzzy-Based Smart Utilization of Mobile Electric Vehicles. IEEE Trans. Ind. Inform. 2016, 12, 503–514. [Google Scholar] [CrossRef]
- Zhang, H.; Hu, Z.; Xu, Z.; Song, Y. Optimal Planning of PEV Charging Station With Single Output Multiple Cables Charging Spots. IEEE Trans. Smart Grid 2017, 8, 2119–2128. [Google Scholar] [CrossRef]
- Wang, R.; Wang, P.; Xiao, G. Two-Stage Mechanism for Massive Electric Vehicle Charging Involving Renewable Energy. IEEE Trans. Veh. Technol. 2016, 65, 4159–4171. [Google Scholar] [CrossRef]
- Mayoraz, E.; Alpaydin, E. Support vector machines for multi-class classification. In Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 1999; pp. 833–842. [Google Scholar] [CrossRef] [Green Version]
- Murthy, V.N.; Singh, V.; Chen, T.; Manmatha, R.; Comaniciu, D. Deep Decision Network for Multi-class Image Classification. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 2240–2248. [Google Scholar] [CrossRef]
- Ma, X.; Tao, Z.; Wang, Y.; Yu, G.; Wang, Y. Long short-term memory neural network for traffic speed prediction using remote microwave sensor data. Transp. Res. Part C Emerg. Technol. 2015, 54, 187–197. [Google Scholar] [CrossRef]
- Deligiannis, P.; Koutroubinas, S.; Koronias, G. Predicting Energy Consumption Through Machine Learning Using a Smart-Metering Architecture. IEEE Potentials 2019, 38, 29–34. [Google Scholar] [CrossRef]
- Géron, A. Hands-On Machine Learning with Scikit-Learn and TensorFlow; O’Reilly Media: Newton, MA, USA, 2017. [Google Scholar]
- Ho, T.K. The random subspace method for constructing decision forests. IEEE Trans. Pattern Anal. Mach. Intell. 1998, 20, 832–844. [Google Scholar]
- Nielsen, M. Neural Networks and Deep Learning. California. 2019. Available online: http://neuralnetworksanddeeplearning.com/ (accessed on 14 July 2020).
- Baran, M.E.; Wu, F.F. Network reconfiguration in distribution systems for loss reduction and load balancing. IEEE Trans. Power Deliv. 1989, 4, 1401–1407. [Google Scholar] [CrossRef]
- Carlson, M. Now Is the Time for Time-of-Use Pricing. Cubillinois.wordpress.com. 2015. Available online: https://cubillinois.wordpress.com/2015/02/13/now-is-the-time-for-time-of-use-pricing/ (accessed on 7 July 2020).
- Shibl, M. Bus Load Data. Kaggle.com. 2020. Available online: https://www.kaggle.com/mostafashibl/bus-load-data (accessed on 14 July 2020).
- Muratori, M. Impact of Uncoordinated Plug-In Electric Vehicle Charging on Residential Power Demand. Nat. Energy 2018, 3, 193–201. [Google Scholar] [CrossRef]
- Zhang, P.; Qian, K.; Zhou, C.; Stewart, B.G.; Hepburn, D.M. A Methodology for Optimization of Power Systems Demand Due to Electric Vehicle Charging Load. IEEE Trans. Power Syst. 2012, 27, 1628–1636. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ML Model | Advantages | Disadvantages |
|---|---|---|
| Decision Tree (DT) |
|
|
| Random Forest (RF) |
|
|
| Support Vector Machine (SVM) |
|
|
| K-Nearest Neighbors |
|
|
| Deep Neural Network (DNN) |
|
|
| Long Short Term Memory (LSTM) |
|
|
| ML Model | Accuracy |
|---|---|
| Decision Tree (DT) | 94% |
| Random Forest (RF) | 95% |
| Support Vector Machine (SVM) | 30% |
| K-Nearest Neighbors (KNN) | 42% |
| Deep Neural Network (DNN) | 78% |
| Long Short Term Memory (LSTM) | 95% |
| ML Model | Accuracy |
|---|---|
| Decision Tree (DT) | 84% |
| Random Forest (RF) | 90% |
| Support Vector Machine (SVM) | 57% |
| K-Nearest Neighbors (KNN) | 84% |
| Deep Neural Network (DNN) | 85% |
| Long Short Term Memory (LSTM) | 94% |
| ML Model | Accuracy | Accuracy Change |
|---|---|---|
| Decision Tree (DT) | 77% | −17% |
| Random Forest (RF) | 86% | −9% |
| Long Short Term Memory (LSTM) | 95% | 0% |
| ML Model | Accuracy | Accuracy Change |
|---|---|---|
| Decision Tree (DT) | 84% | 0% |
| Random Forest (RF) | 89% | −1% |
| K-Nearest Neighbors (KNN) | 84% | 0% |
| Deep Neural Network (DNN) | 83% | −2% |
| Long Short Term Memory (LSTM) | 94% | 0% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shibl, M.; Ismail, L.; Massoud, A. Electric Vehicles Charging Management Using Machine Learning Considering Fast Charging and Vehicle-to-Grid Operation. Energies 2021, 14, 6199. https://doi.org/10.3390/en14196199
Shibl M, Ismail L, Massoud A. Electric Vehicles Charging Management Using Machine Learning Considering Fast Charging and Vehicle-to-Grid Operation. Energies. 2021; 14(19):6199. https://doi.org/10.3390/en14196199
Chicago/Turabian StyleShibl, Mostafa, Loay Ismail, and Ahmed Massoud. 2021. "Electric Vehicles Charging Management Using Machine Learning Considering Fast Charging and Vehicle-to-Grid Operation" Energies 14, no. 19: 6199. https://doi.org/10.3390/en14196199
APA StyleShibl, M., Ismail, L., & Massoud, A. (2021). Electric Vehicles Charging Management Using Machine Learning Considering Fast Charging and Vehicle-to-Grid Operation. Energies, 14(19), 6199. https://doi.org/10.3390/en14196199