
Optimal Rotating Receiver Angles Estimation for Multicoil Dynamic Wireless Power Transfer

 ,
,  , ,
, , 

Abstract
:
1. Introduction
2. Moving Track Model Study
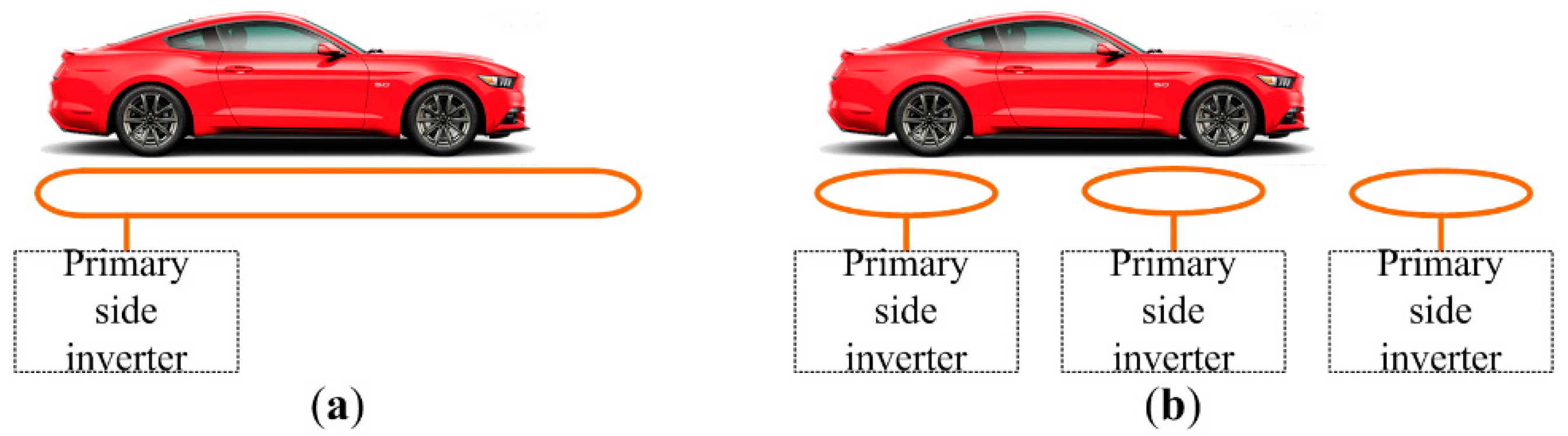
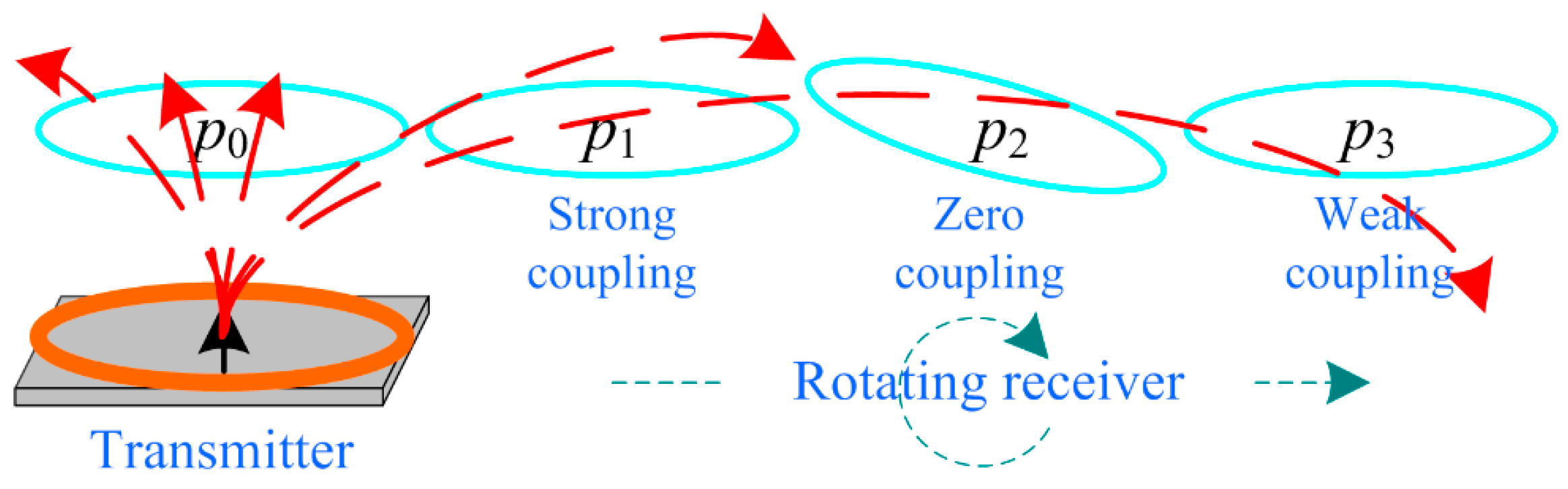
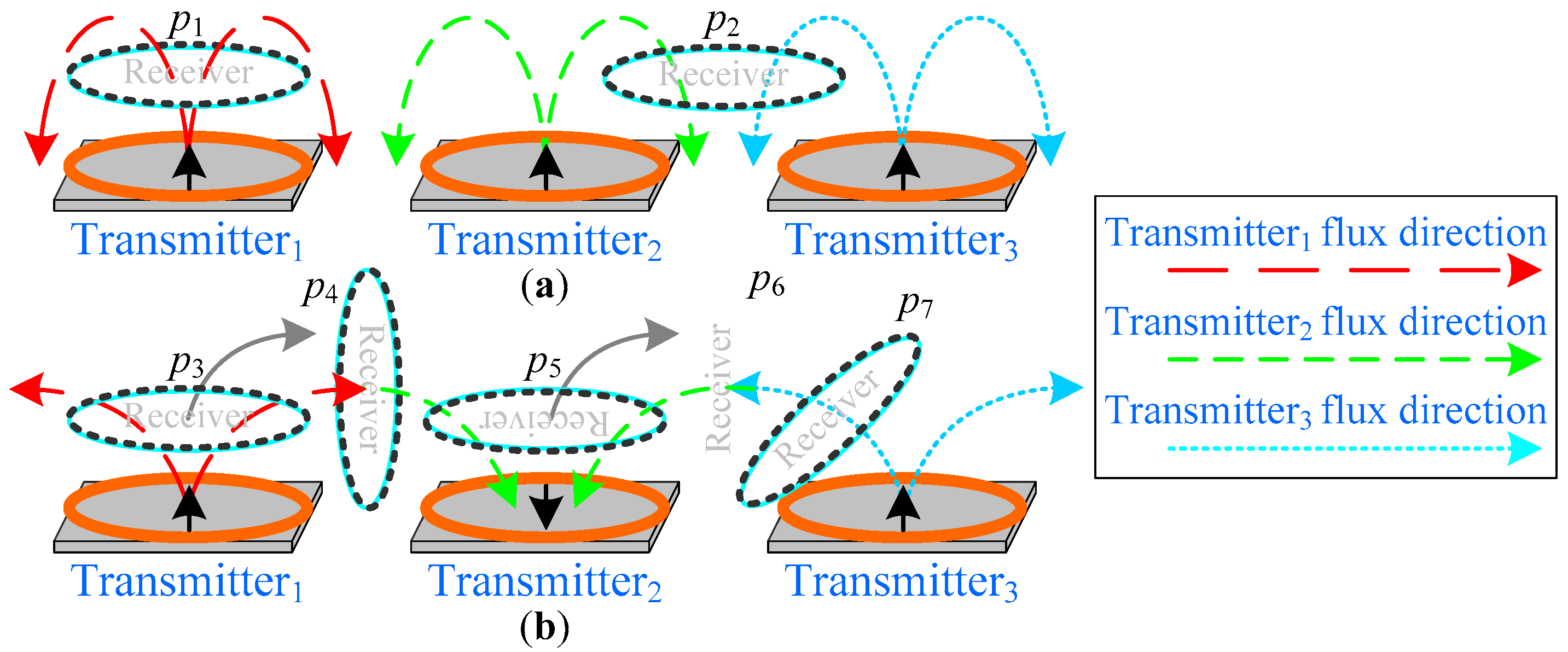
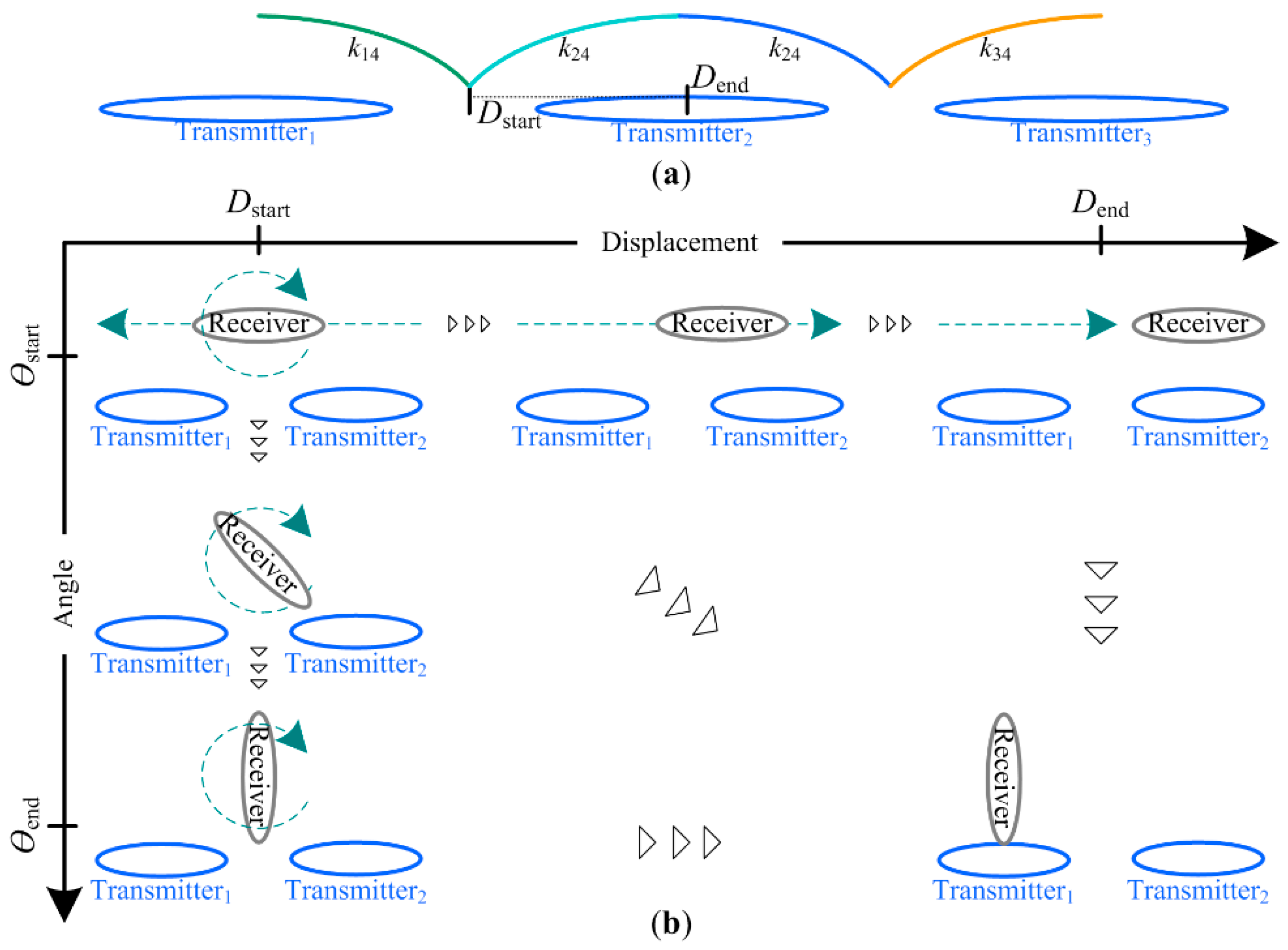
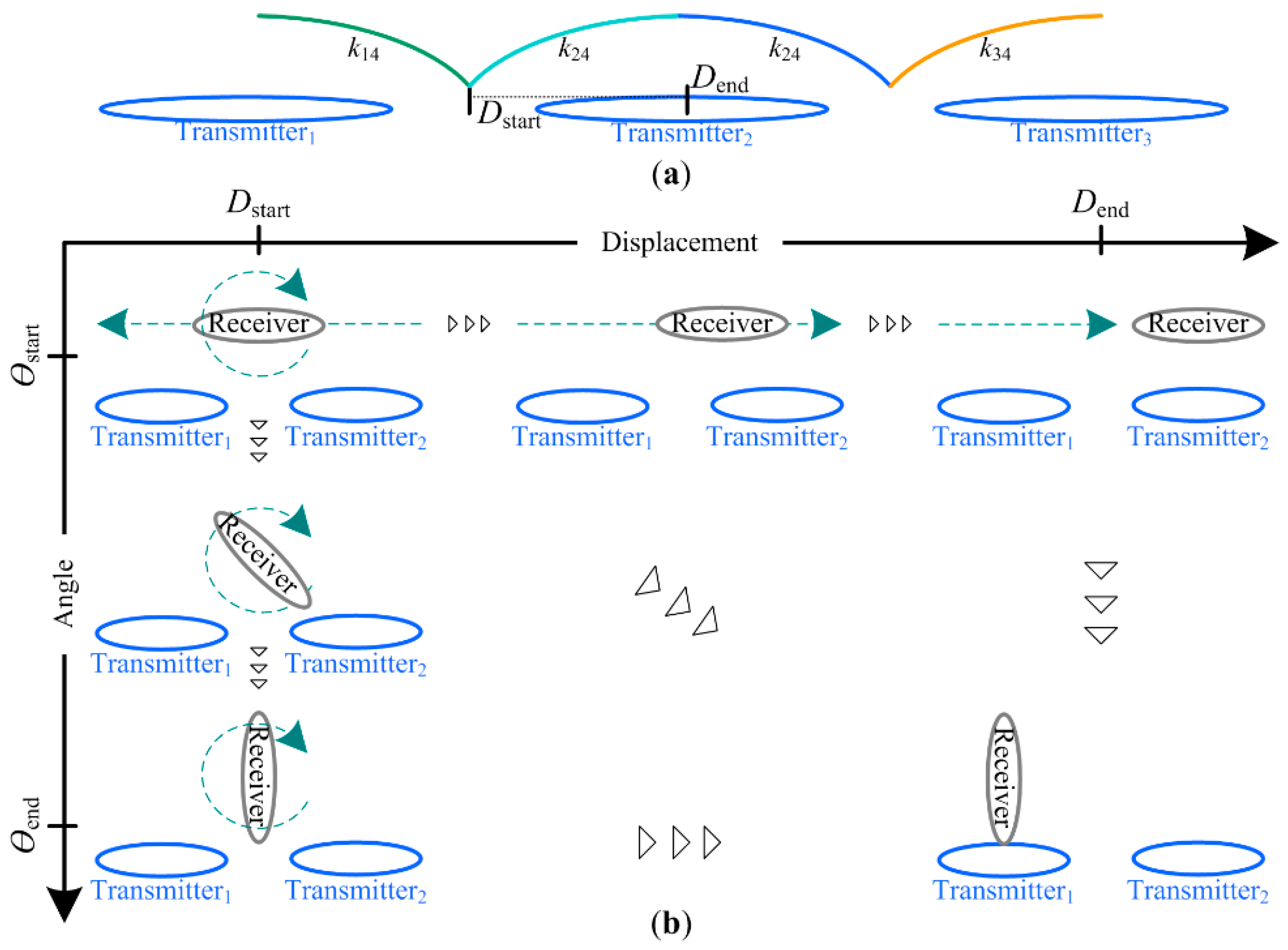
2.1. Description of the Approach
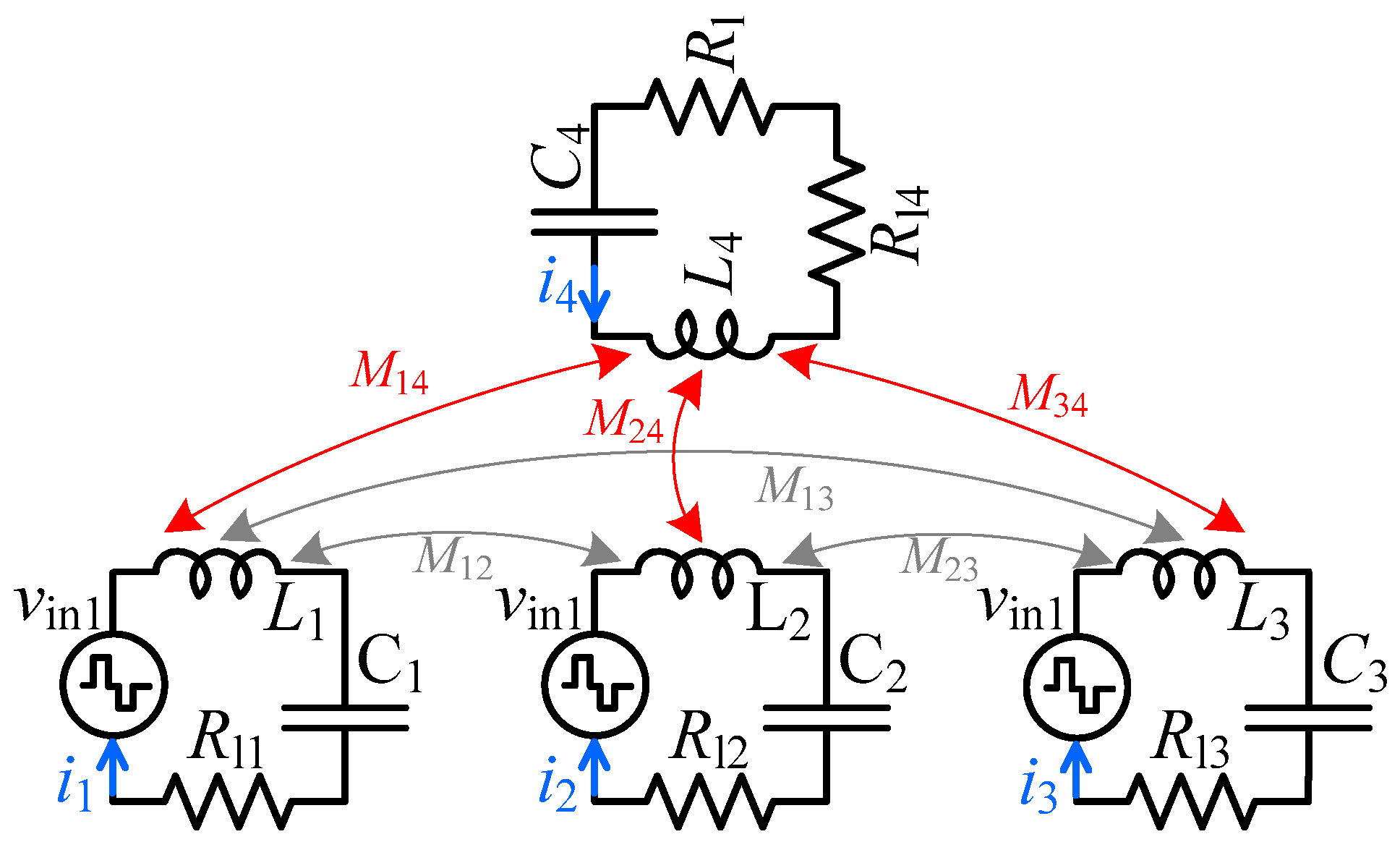
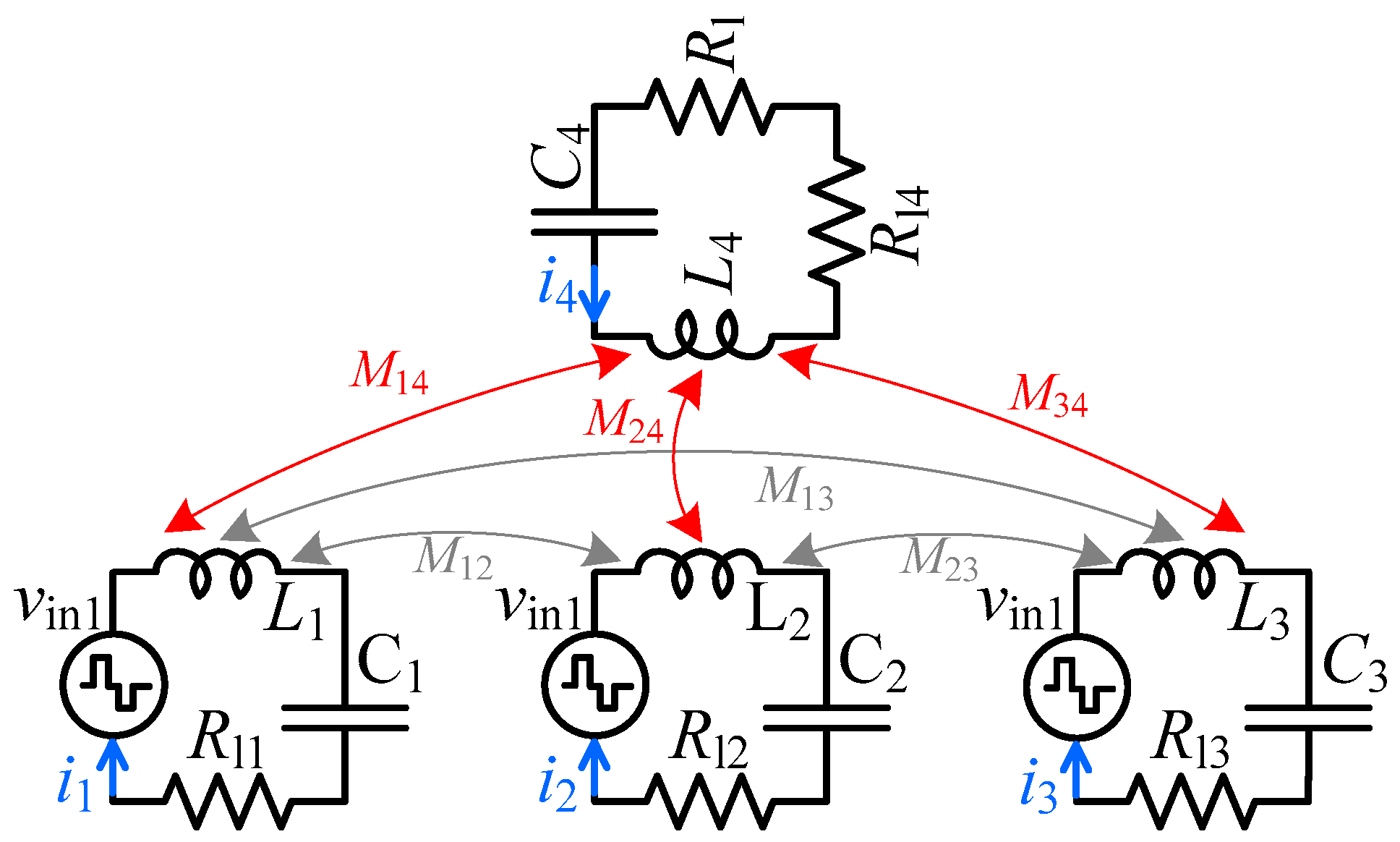
2.2. State Space Model of the Power Transmitter Link
3. Simulation Study
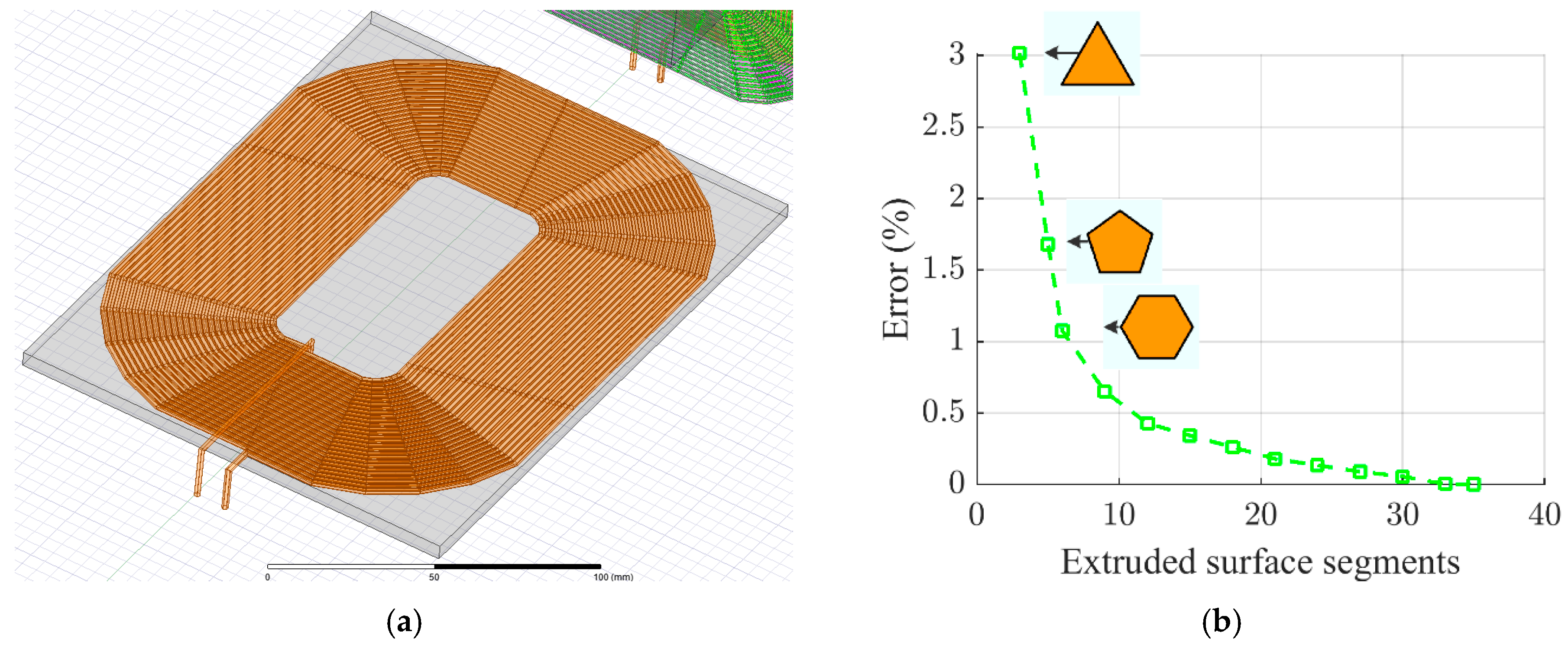
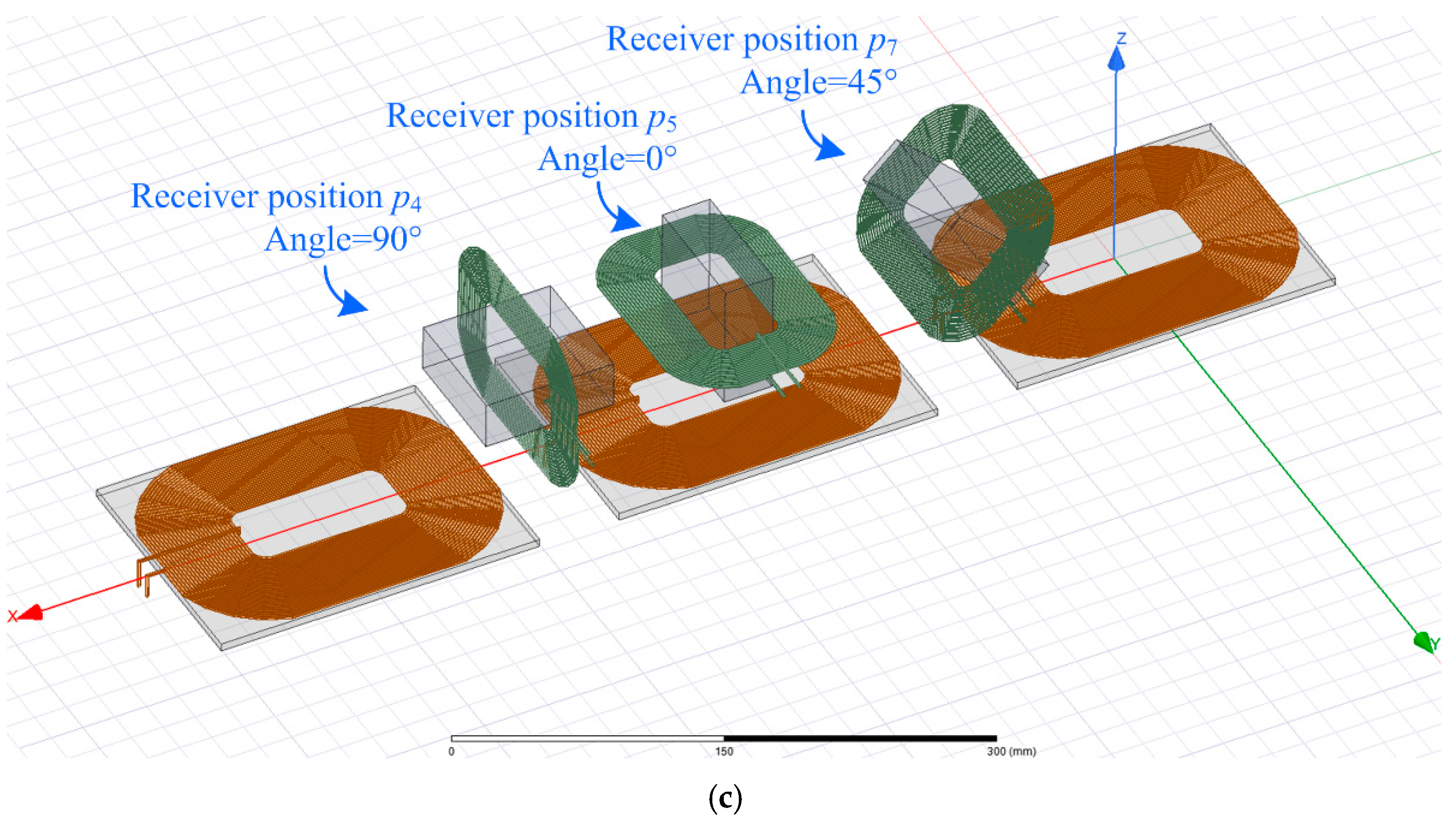
3.1. Simulation Model Description
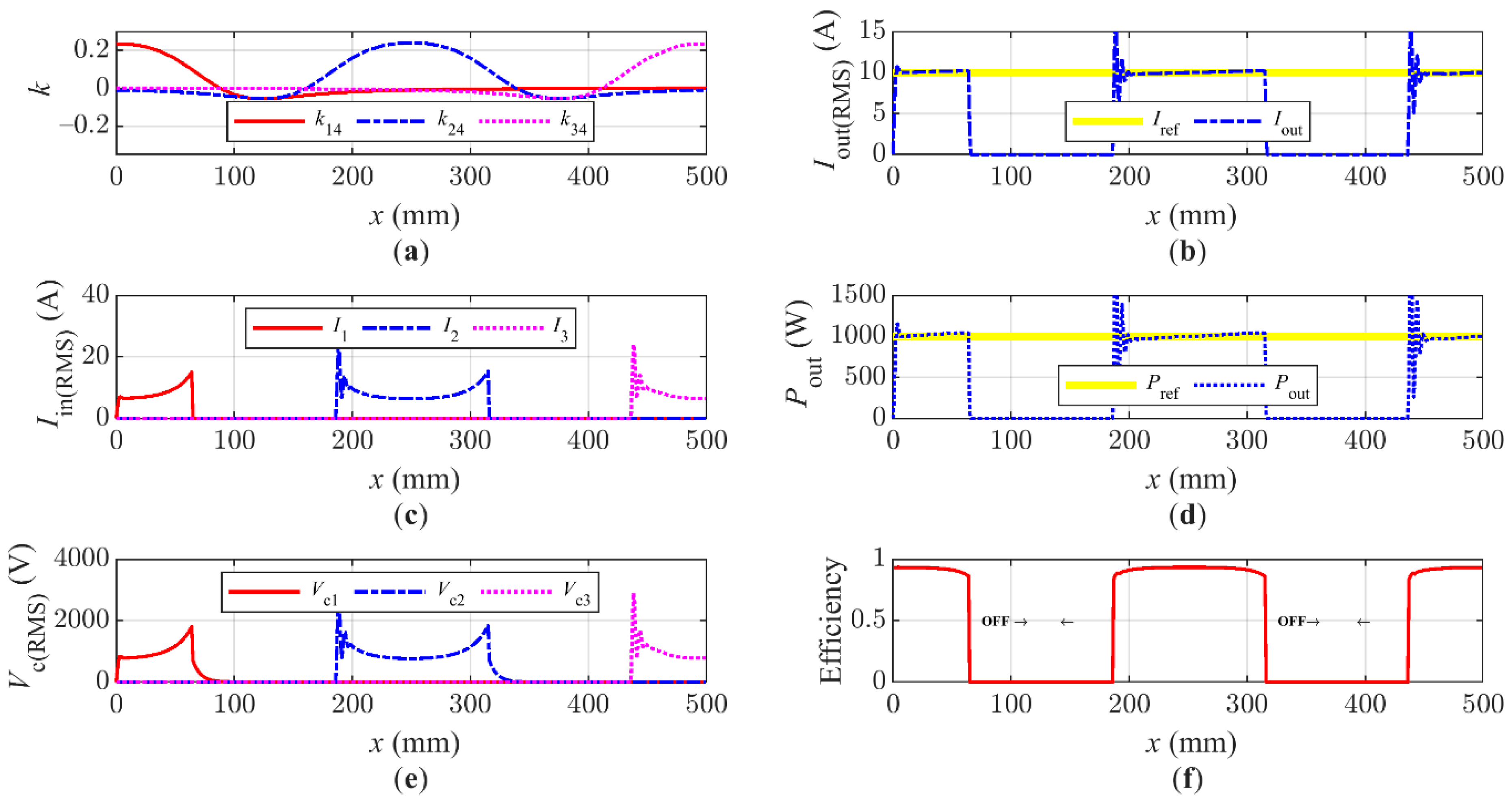
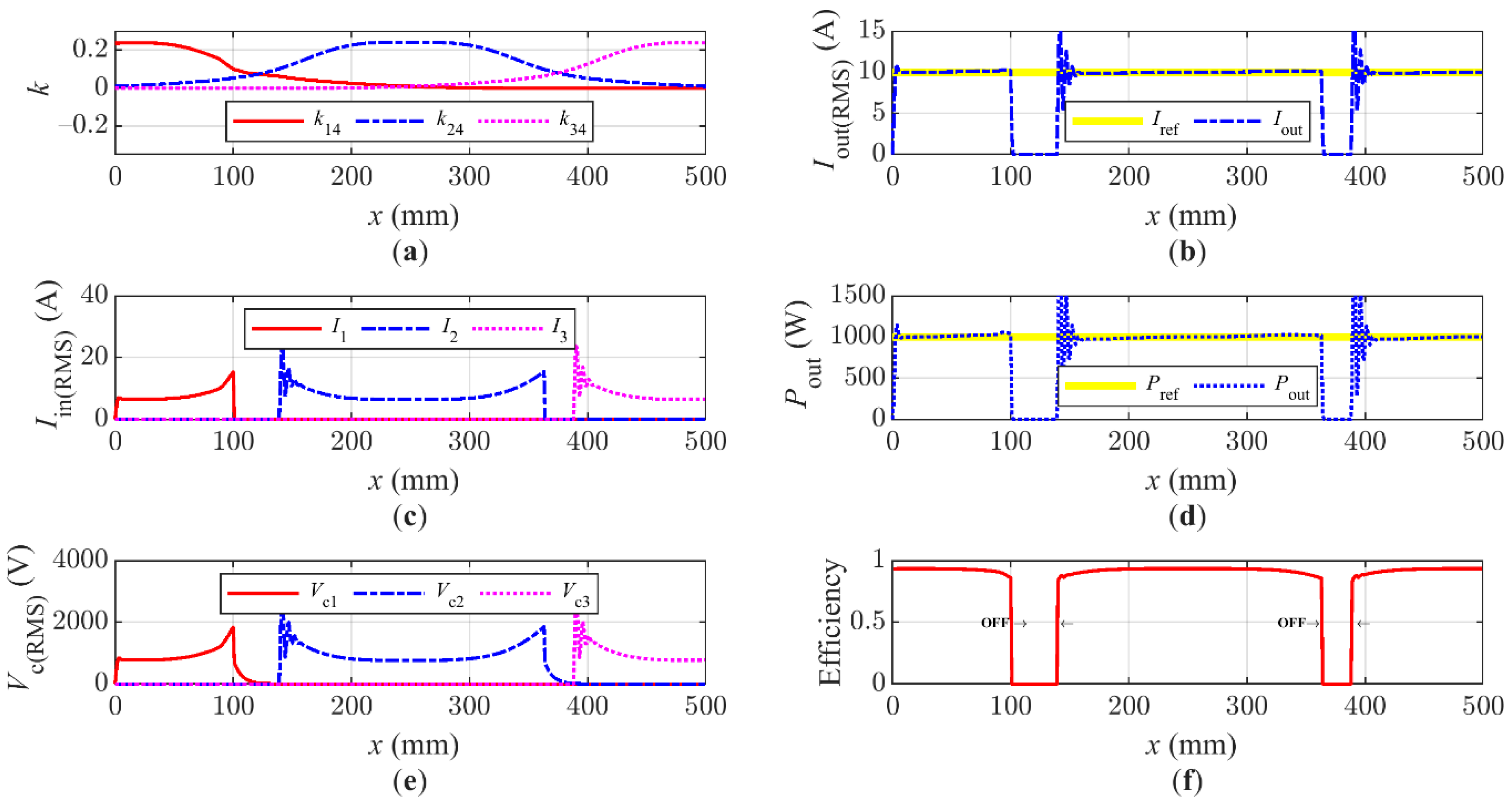
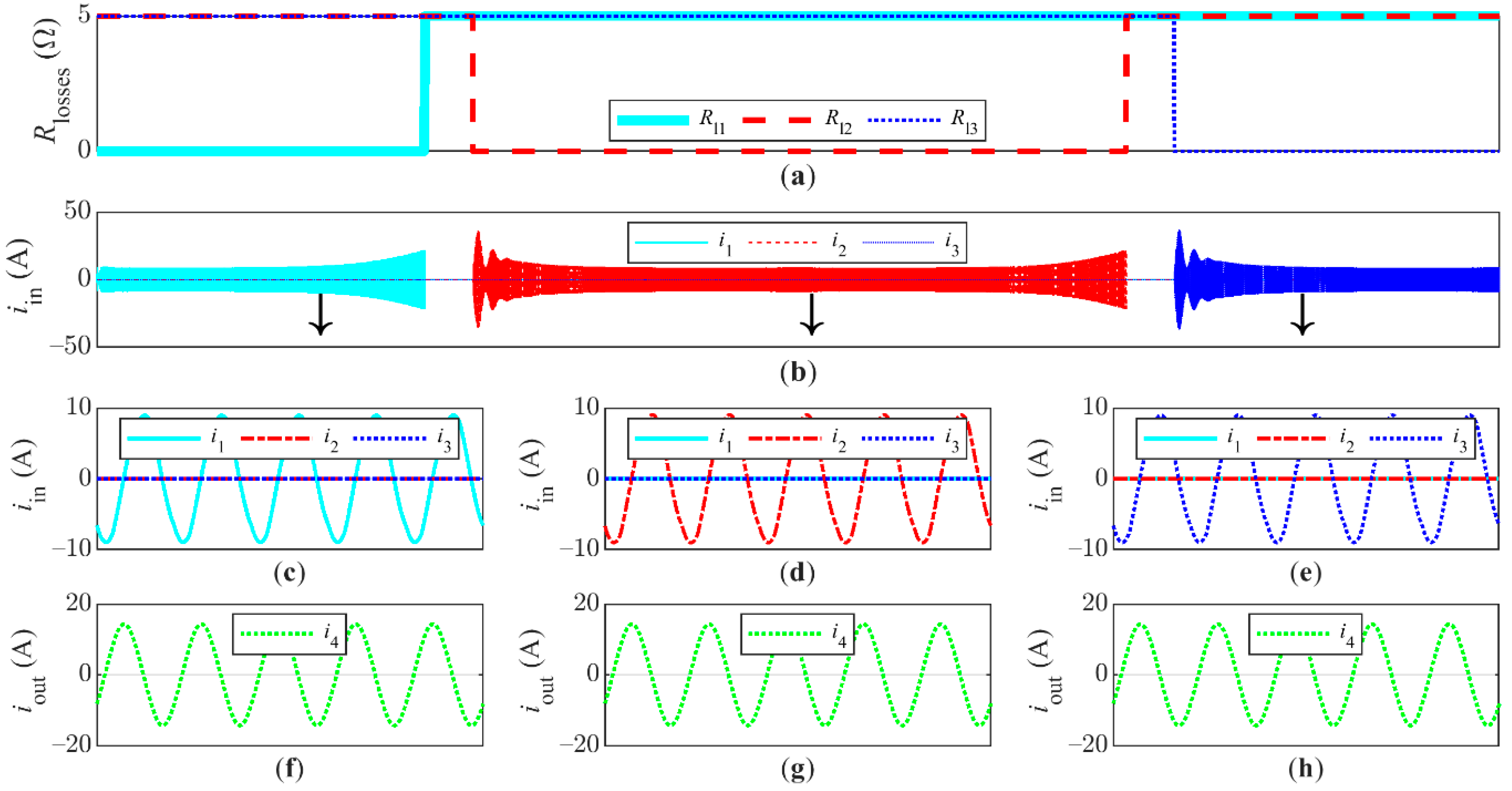
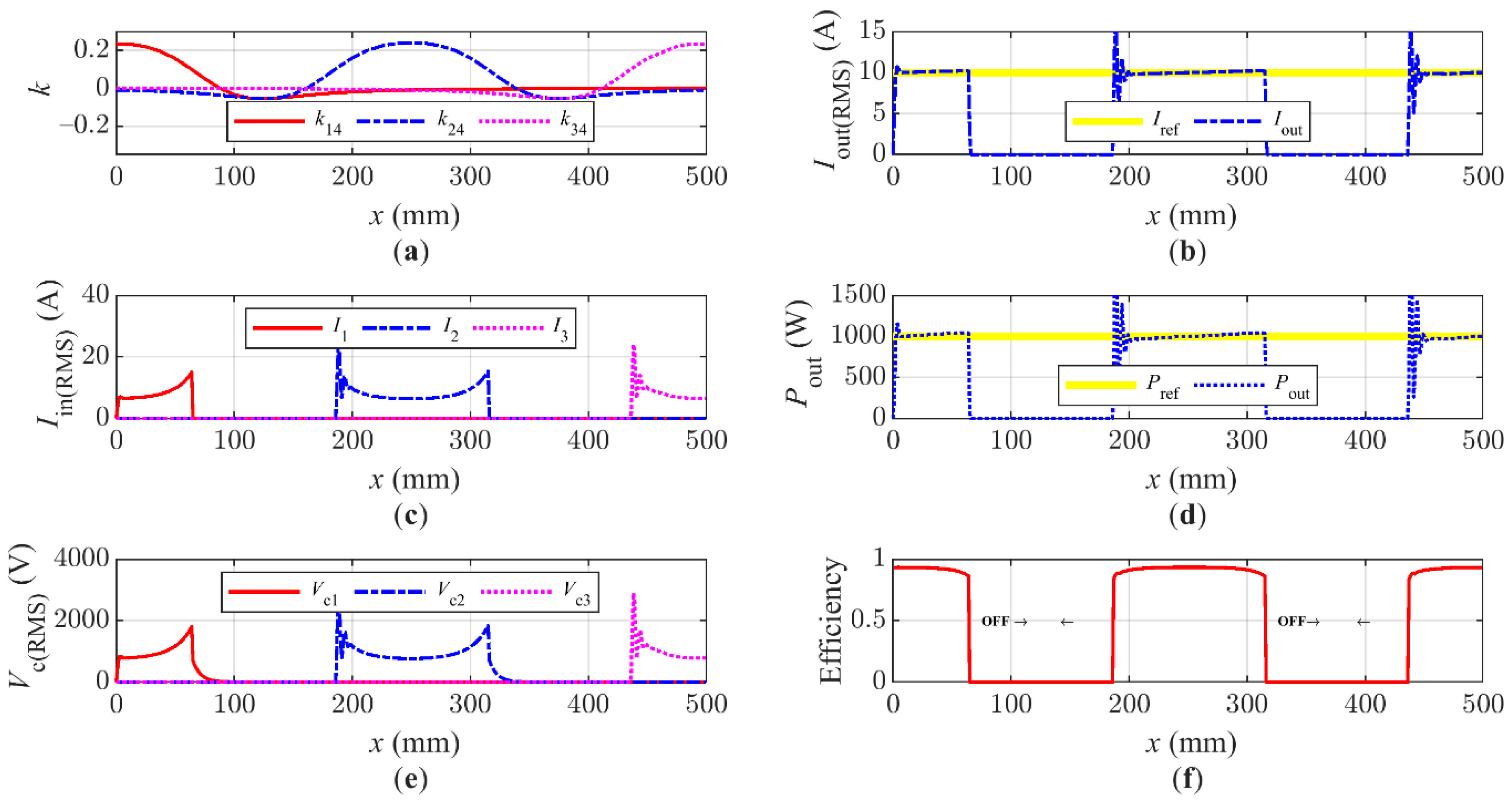
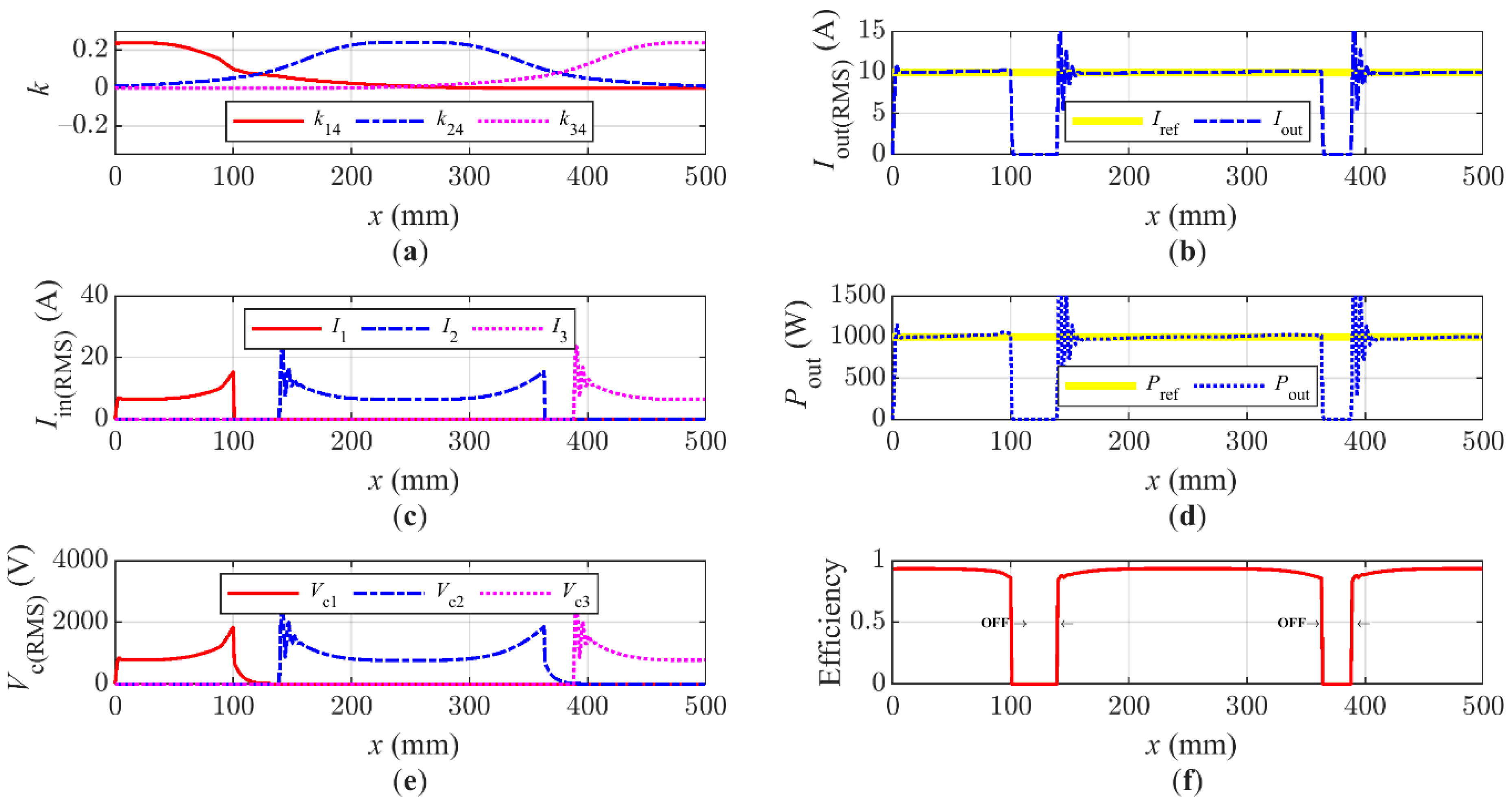
3.2. Simulation of a Dynamically Moving Receiver
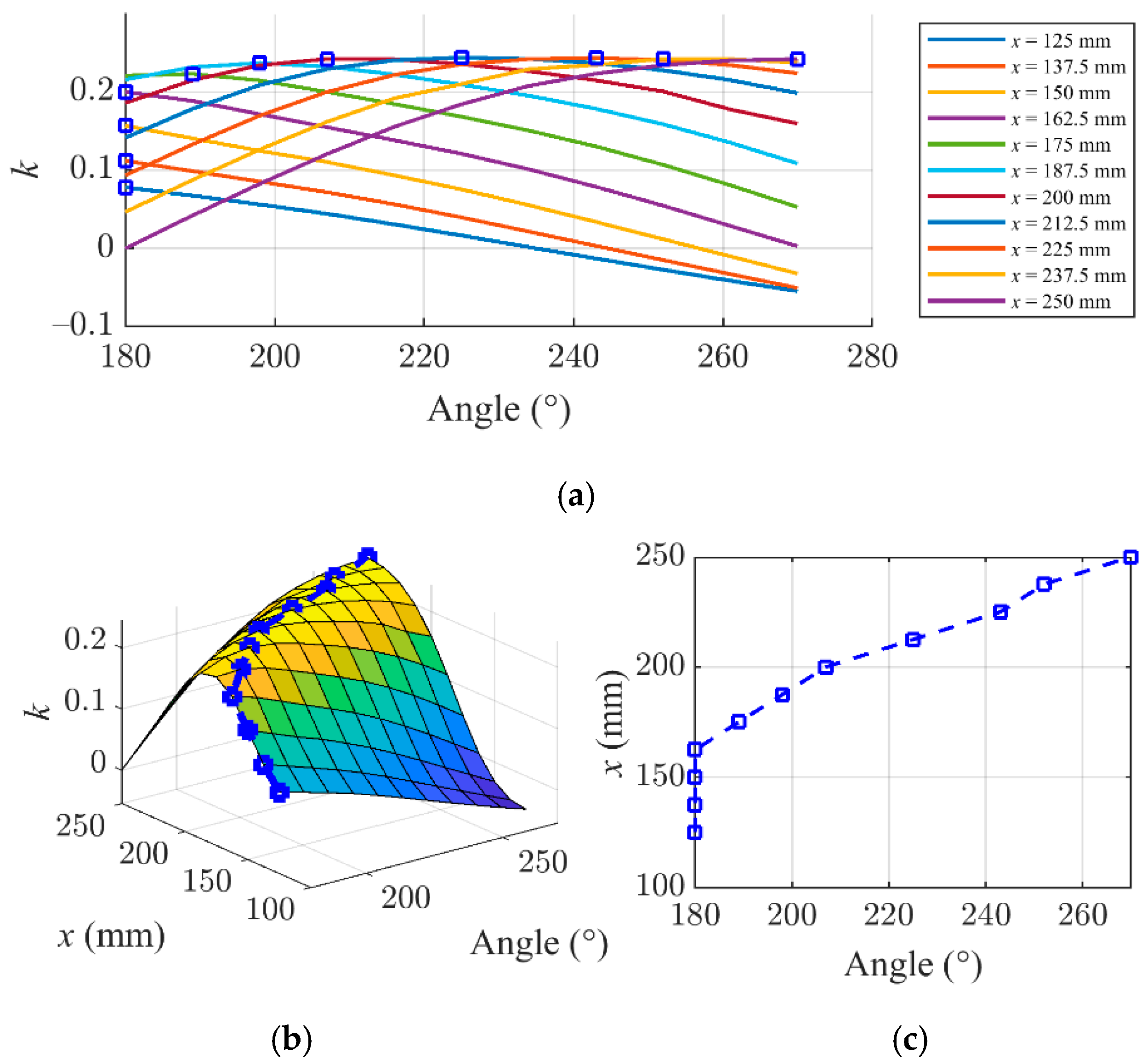
4. Optimal Movement Trajectory Study
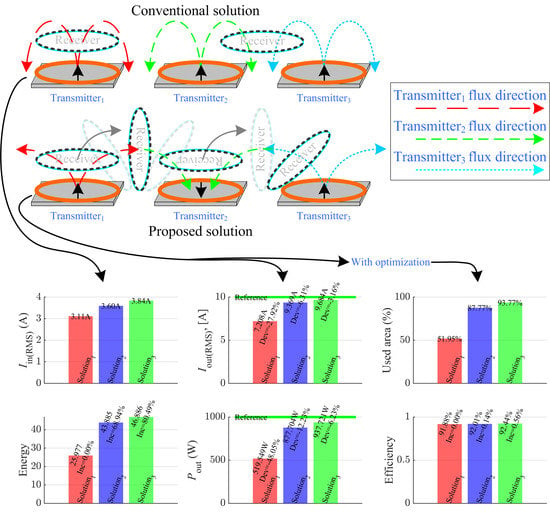
5. Comparison
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Shevchenko, V.; Husev, O.; Strzelecki, R.; Pakhaliuk, B.; Poliakov, N.; Strzelecka, N. Compensation Topologies in IPT Systems: Standards, Requirements, Classification, Analysis, Comparison and Application. IEEE Access 2019, 7, 120559–120580. [Google Scholar]
- Patil, D.; McDonough, M.K.; Miller, J.M.; Fahimi, B.; Balsara, P.T. Wireless Power Transfer for Vehicular Applications: Overview and Challenges. IEEE Trans. Transp. Electrification 2017, 4, 3–37. [Google Scholar] [CrossRef]
- Jayathurathnage, P.K.S.; Alphones, A.; Vilathgamuwa, D.M.; Ong, A. Optimum Transmitter Current Distribution for Dynamic Wireless Power Transfer with Segmented Array. IEEE Trans. Microw. Theory Tech. 2017, 66, 346–356. [Google Scholar] [CrossRef]
- Panchal, C.; Stegen, S.; Lu, J.-W. Review of static and dynamic wireless electric vehicle charging system. Eng. Sci. Technol. Int. J. 2018, 21, 922–937. [Google Scholar] [CrossRef]
- Laporte, S.; Coquery, G.; Deniau, V.; De Bernardinis, A.; Hautière, N.; Bernardinis, D. Dynamic Wireless Power Transfer Charging Infrastructure for Future EVs: From Experimental Track to Real Circulated Roads Demonstrations. World Electr. Veh. J. 2019, 10, 84. [Google Scholar] [CrossRef] [Green Version]
- Anyapo, C.; Teerakawanich, N.; Mitsantisuk, C.; Ohishi, K. Experimental Verification of Coupling Effect and Power Transfer Capability of Dynamic Wireless Power Transfer. In Proceedings of the 2018 International Power Electronics Conference (IPEC-Niigata 2018—ECCE Asia), Niigata, Japan, 20–24 May 2018; pp. 3332–3337. [Google Scholar]
- Sampath, J.P.K.; Vilathgamuwa, D.M.; Alphones, A. Efficiency Enhancement for Dynamic Wireless Power Transfer System with Segmented Transmitter Array. IEEE Trans. Transp. Electrif. 2015, 2, 76–85. [Google Scholar] [CrossRef]
- Anyapo, C. Development of Long Rail Dynamic Wireless Power Transfer for Battery-Free Mobile Robot. In Proceedings of the 2019 10th International Conference on Power Electronics and ECCE Asia (ICPE 2019-ECCE Asia), Busan, Korea, 27–30 May 2019; pp. 1–6. [Google Scholar]
- Li, S.; Guo, Y.; Tao, C.; Li, F.; Wang, L.; Bo, Q. Analysis of the input impedance of the rectifier and design of LCC compensation network of the dynamic wireless power transfer system. IET Power Electron. 2019, 12, 2678–2687. [Google Scholar] [CrossRef]
- Hutchinson, L.; Waterson, B.; Anvari, B.; Naberezhnykh, D. Potential of wireless power transfer for dynamic charging of electric vehicles. IET Intell. Transp. Syst. 2019, 13, 3–12. [Google Scholar] [CrossRef] [Green Version]
- Jayathurathnage, P.; Liu, F. Optimal Excitation of Multi-transmitter Wireless Power Transfer System without Receiver Sensors. In Proceedings of the 2019 IEEE PELS Workshop on Emerging Technologies: Wireless Power Transfer (WoW), London, UK, 18–21 June 2019; pp. 25–28. [Google Scholar]
- Covic, G.A.; Boys, J.T. Modern Trends in Inductive Power Transfer for Transportation Applications. IEEE J. Emerg. Sel. Top. Power Electron. 2013, 1, 28–41. [Google Scholar] [CrossRef]
- Houran, M.A.; Yang, X.; Chen, W. Design of a Cylindrical Winding Structure for Wireless Power Transfer Used in Rotatory Applications. Electronics 2020, 9, 526. [Google Scholar] [CrossRef] [Green Version]
- Han, H.; Mao, Z.; Zhu, Q.; Su, M.; Hu, A.P. A 3D Wireless Charging Cylinder With Stable Rotating Magnetic Field for Multi-Load Application. IEEE Access 2019, 7, 35981–35997. [Google Scholar] [CrossRef]
- Zhang, C.; Lin, D.; Hui, S.Y.R. Ball-Joint Wireless Power Transfer Systems. IEEE Trans. Power Electron. 2018, 33, 65–72. [Google Scholar] [CrossRef]
- Houran, M.A.; Yang, X.; Chen, W. Free Angular-Positioning Wireless Power Transfer Using a Spherical Joint. Energies 2018, 11, 3488. [Google Scholar] [CrossRef] [Green Version]
- Dai, Z.; Wang, J.; Jin, L.; Jing, H.; Fang, Z.; Hou, H. A Full-Freedom Wireless Power Transfer for Spheroid Joints. IEEE Access 2019, 7, 18675–18684. [Google Scholar] [CrossRef]
- Sasaki, M.; Yamamoto, M. Exciting voltage control for transfer efficiency maximization for multiple wireless power transfer systems. In Proceedings of the 2017 IEEE Energy Conversion Congress and Exposition (ECCE); Institute of Electrical and Electronics Engineers (IEEE), Cincinnati, OH, USA, 1–5 October 2017; pp. 5523–5528. [Google Scholar]
- Shi, L.; Yin, Z.; Jiang, L.; Li, Y. Advances in inductively coupled power transfer technology for rail transit. China Electrotech. Soc. Trans. Electr. Mach. Syst. 2017, 1, 383–396. [Google Scholar] [CrossRef]
- Yan, Z.; Song, B.; Zhang, Y.; Zhang, K.H.; Mao, Z.; Hu, Y. A Rotation-Free Wireless Power Transfer System With Stable Output Power and Efficiency for Autonomous Underwater Vehicles. IEEE Trans. Power Electron. 2019, 34, 4005–4008. [Google Scholar] [CrossRef]
- Lee, G.; Gwak, H.; Kim, Y.-S.; Park, W.-S.; Gwak, H. Wireless power transfer system for diagnostic sensor on rotating spindle. In Proceedings of the 2013 IEEE Wireless Power Transfer (WPT), Perugia, Italy, 15–16 May 2013; pp. 100–102. [Google Scholar]
- Song, K.; Ma, B.; Yang, G.; Jiang, J.; Wei, R.; Zhang, H.; Zhu, C. A Rotation-Lightweight Wireless Power Transfer System for Solar Wing Driving. IEEE Trans. Power Electron. 2019, 34, 8816–8830. [Google Scholar] [CrossRef]
- Dang, Z.; Abu Qahouq, J.A. Elimination method for the Transmission Efficiency Valley of Death in laterally misaligned wireless power transfer systems. In Proceedings of the 2015 IEEE Applied Power Electronics Conference and Exposition (APEC); Institute of Electrical and Electronics Engineers (IEEE), Charlotte, NC, USA, 15–19 March 2015; pp. 1644–1649. [Google Scholar]
- Mucko, J.; Strzelecki, R. Errors in the analysis of series resonant inverter/converter assuming sinusoidal waveforms of voltage and current. In Proceedings of the 2016 10th International Conference on Compatibility, Power Electronics and Power Engineering (CPE-POWERENG); Institute of Electrical and Electronics Engineers (IEEE), Bydgoszcz, Poland, 29 June–1 July 2016; pp. 369–374. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System and Reference | Efficiency Variation during Movement | Power Variation during Movement | Coupling Variation during Movement |
|---|---|---|---|
| [5] | 85–97% (12%) | Up to 50% (10–20 kW) | - |
| [6] | 0–57% (57%) | 100% (0–30 W) | 0.05–0.9 (0.85 difference) |
| [6] | - | 7–30 W | 0.1–0.95 |
| [7] | 10–30% | - | 0–0.2 |
| [7] | 45–76% | - | 0–0.2 |
| [8] | - | 5.2–32 W | 0.1–0.45 |
| [9] | 88–97% | 600–1500 W | 0–0.2 |
| Description | Symbol | Value | Unit |
|---|---|---|---|
| Track length | - | 500 | mm |
| Primary side coil turns | N1 | 28 | - |
| Secondary side coil turns | N2 | 17 | - |
| Primary side coil wire diameter | d1 | 2 | mm |
| Secondary side coil wire diameter | d2 | 2 | mm |
| Primary side coil dimensions | - | 150 × 200 | mm |
| Secondary side coil dimensions | - | 98 × 144 | mm |
| Input voltage | vin1 | 315 | V |
| Switching frequency | fsw | 100 | kHz |
| Primary side inductances | L1, L2, L3 | 191.26 ± 0.67% | μH |
| Secondary inductance | L4 | 61.63 ± 4.92% | μH |
| Primary side capacitance | C1, C2, C3 | 13.24 | nF |
| Secondary side capacitance | C4 | 41.1 | nF |
| Coil resistances | Rl1, Rl2, Rl3, Rl4 | 0.5 | Ω |
| Output load | Rl | 10 | Ω |
| Description | Symbol | Value | Unit |
|---|---|---|---|
| Start angle | θstart | 180 | ° |
| Angle step | θstep | 9.0 | ° |
| End angle | θend | 270 | ° |
| Start position | Dstart | 125 | mm |
| Position step | Dstep | 12.5 | mm |
| End position | Dend | 250 | mm |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pakhaliuk, B.; Shevchenko, V.; Mućko, J.; Husev, O.; Lukianov, M.; Kołodziejek, P.; Strzelecka, N.; Strzelecki, R. Optimal Rotating Receiver Angles Estimation for Multicoil Dynamic Wireless Power Transfer. Energies 2021, 14, 6144. https://doi.org/10.3390/en14196144
Pakhaliuk B, Shevchenko V, Mućko J, Husev O, Lukianov M, Kołodziejek P, Strzelecka N, Strzelecki R. Optimal Rotating Receiver Angles Estimation for Multicoil Dynamic Wireless Power Transfer. Energies. 2021; 14(19):6144. https://doi.org/10.3390/en14196144
Chicago/Turabian StylePakhaliuk, Bohdan, Viktor Shevchenko, Jan Mućko, Oleksandr Husev, Mykola Lukianov, Piotr Kołodziejek, Natalia Strzelecka, and Ryszard Strzelecki. 2021. "Optimal Rotating Receiver Angles Estimation for Multicoil Dynamic Wireless Power Transfer" Energies 14, no. 19: 6144. https://doi.org/10.3390/en14196144
APA StylePakhaliuk, B., Shevchenko, V., Mućko, J., Husev, O., Lukianov, M., Kołodziejek, P., Strzelecka, N., & Strzelecki, R. (2021). Optimal Rotating Receiver Angles Estimation for Multicoil Dynamic Wireless Power Transfer. Energies, 14(19), 6144. https://doi.org/10.3390/en14196144