
Multi-Port and -Functional Power Conditioner and Its Control Strategy with Renewable Energy Access for a Railway Traction System



Abstract
:
1. Introduction
- (a)
- Improvement of the power quality;
- (b)
- Catenary network without neutral sections;
- (c)
- Coexistence of distributed RESs and TPSS;
- (d)
- Connectivity among railway systems with heterogeneous RESs.
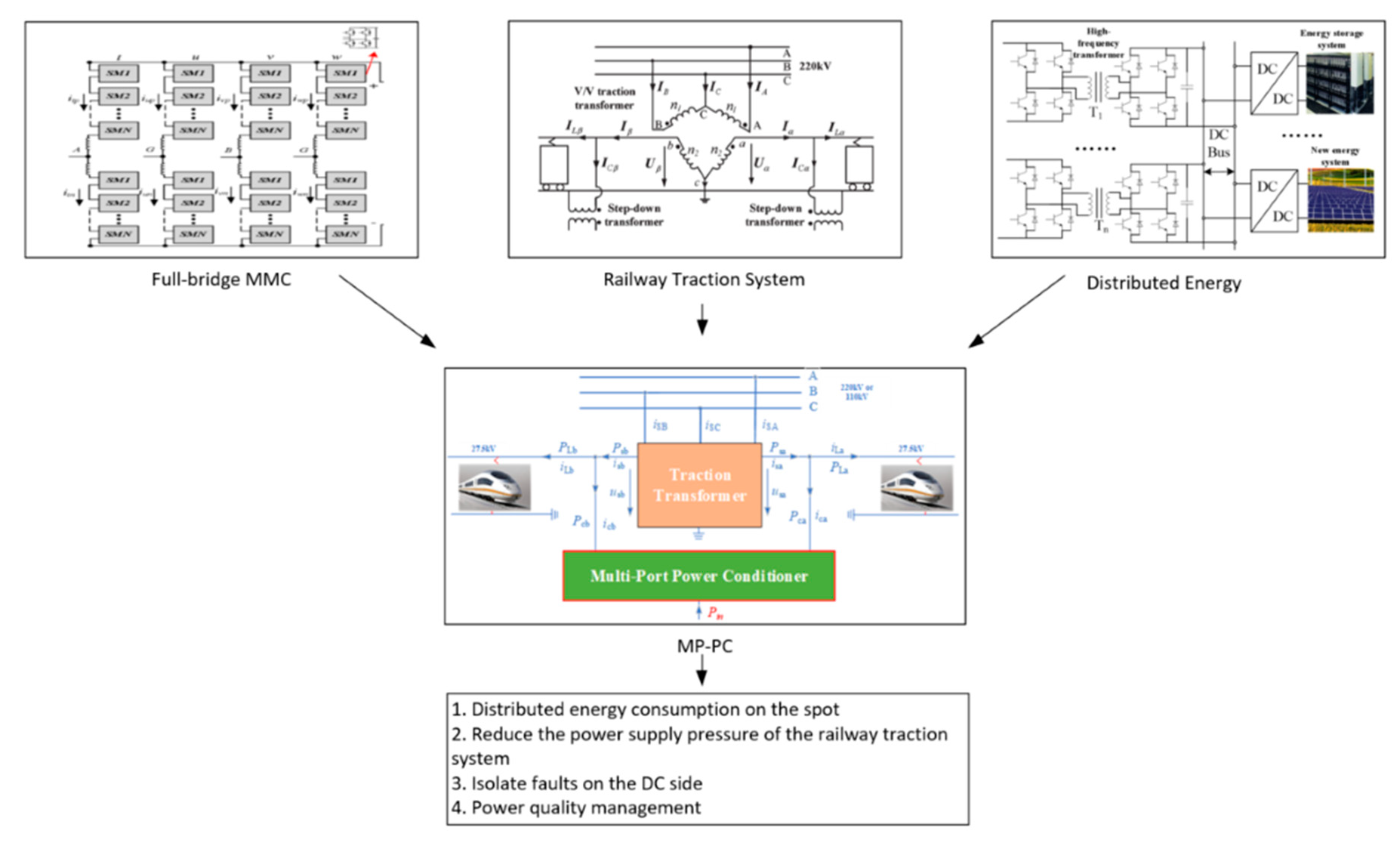
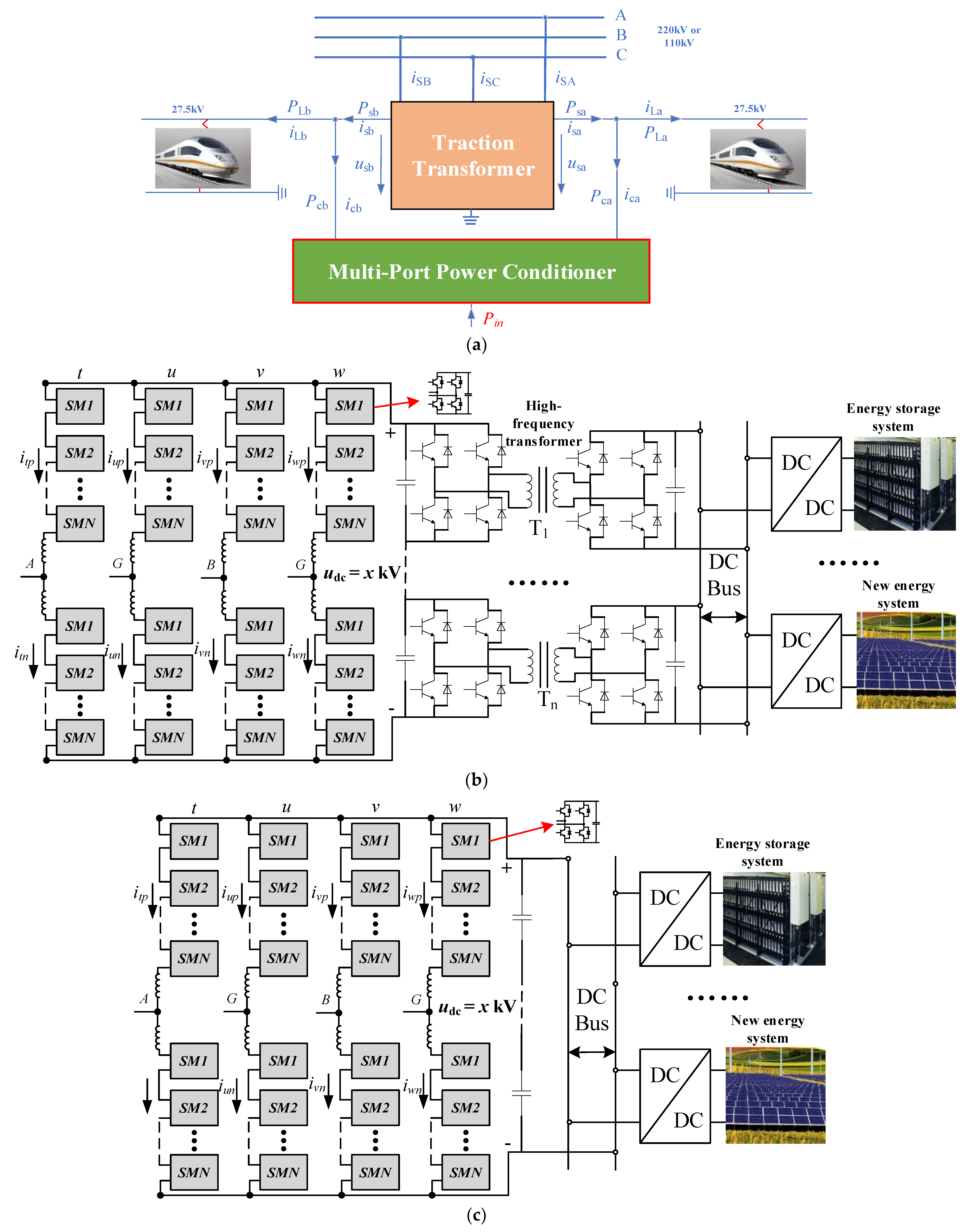
2. Topology and Power Management Strategy of MPPC
3. Topology and Power Management Strategy of MPPC
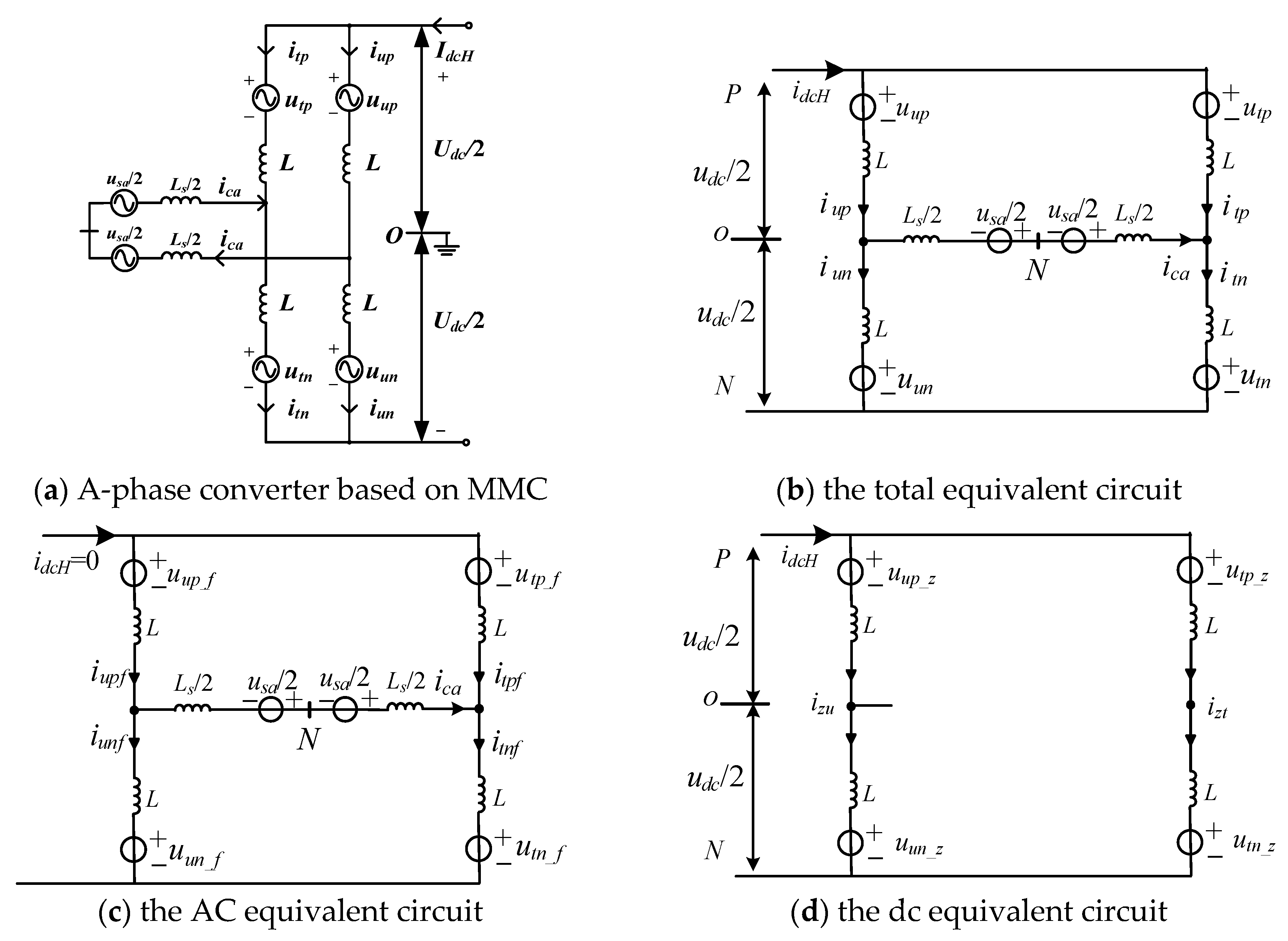
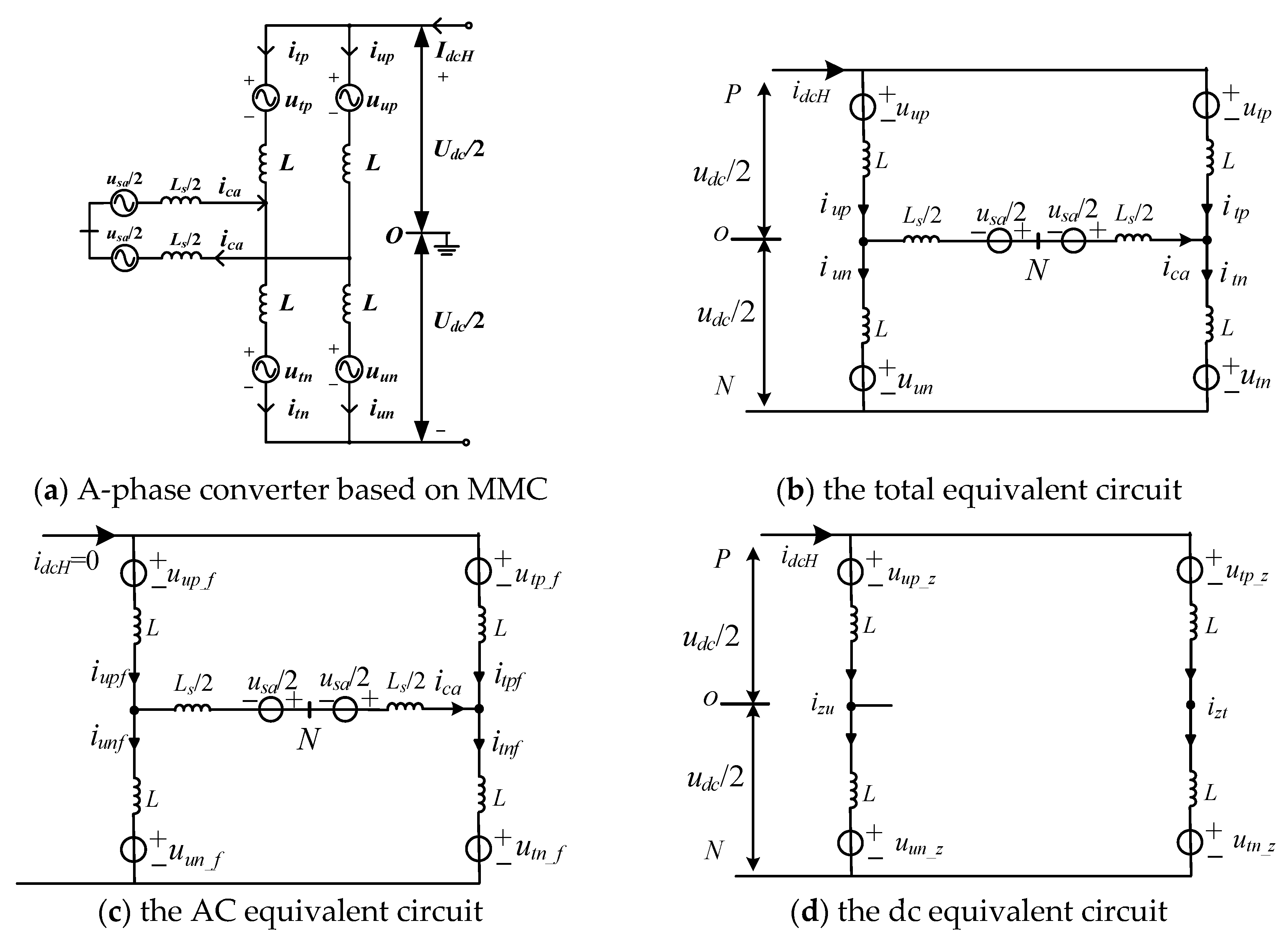
3.1. Equivalent Model of the Full-Bridge-Based MMC Rectifier
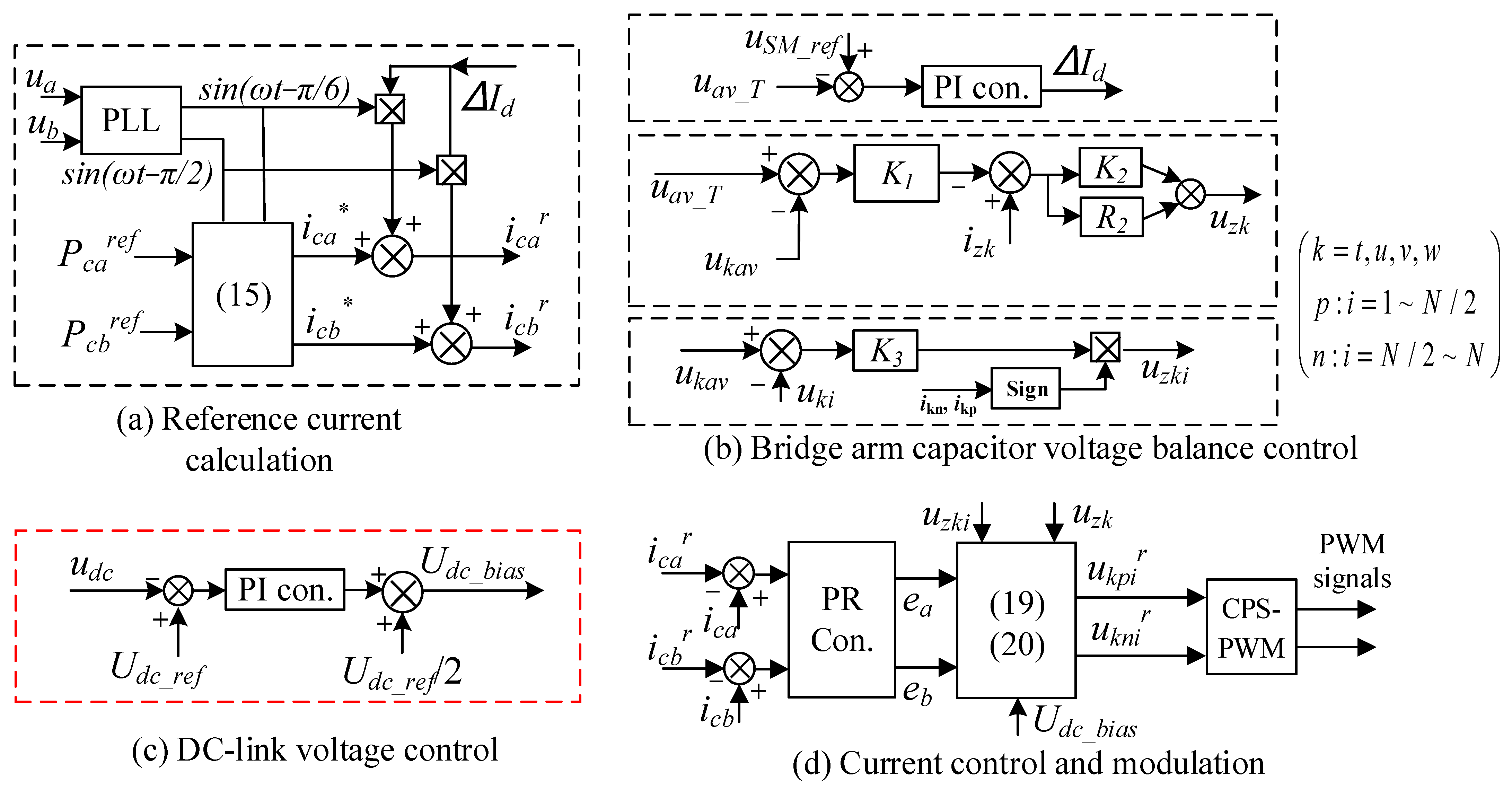
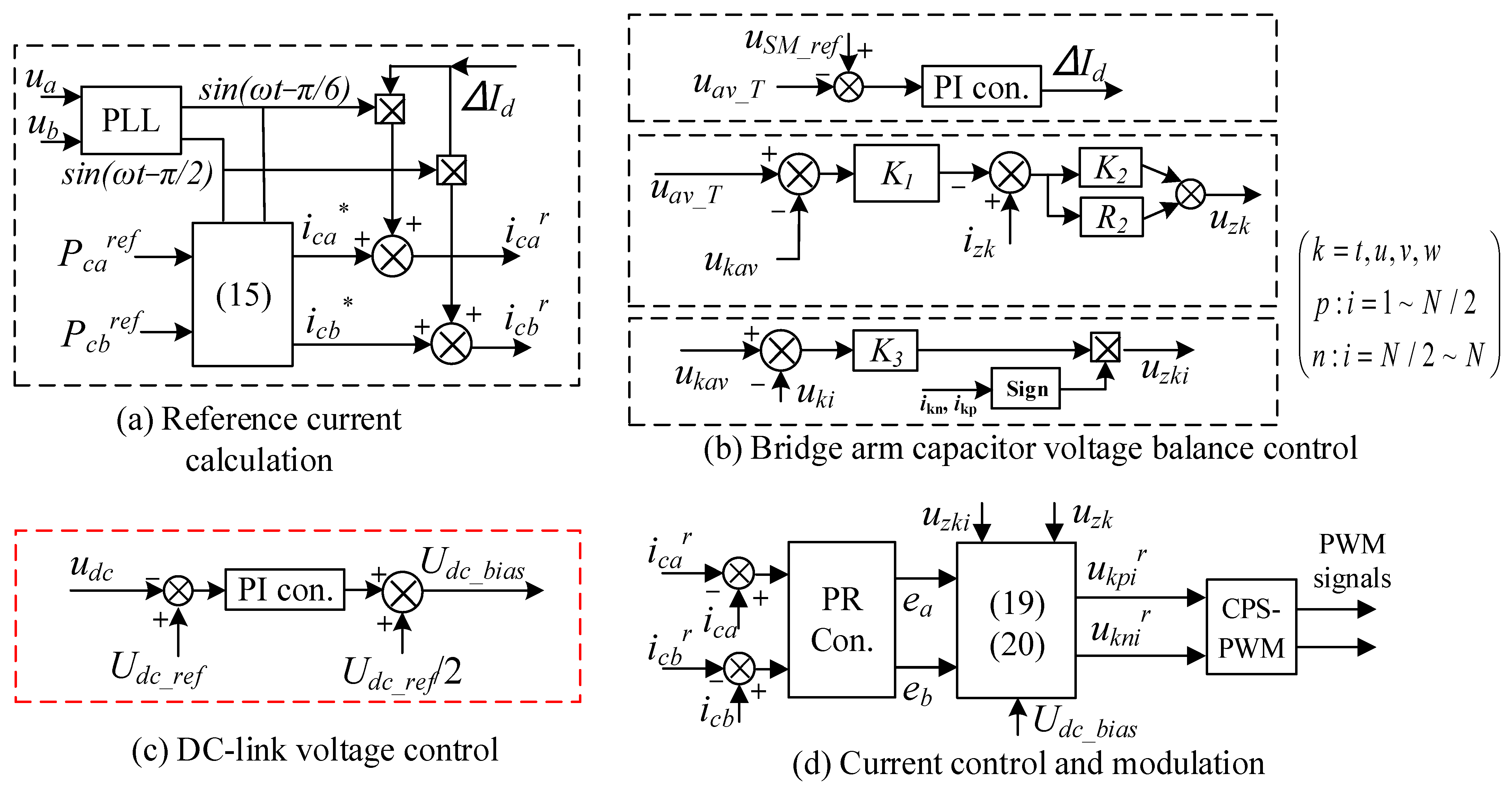
3.2. Control Method of the Full-Bridge-Based MMC Rectifier
3.2.1. Reference Current Calculation
3.2.2. Bridge Arm Capacitor Voltage Balance Control
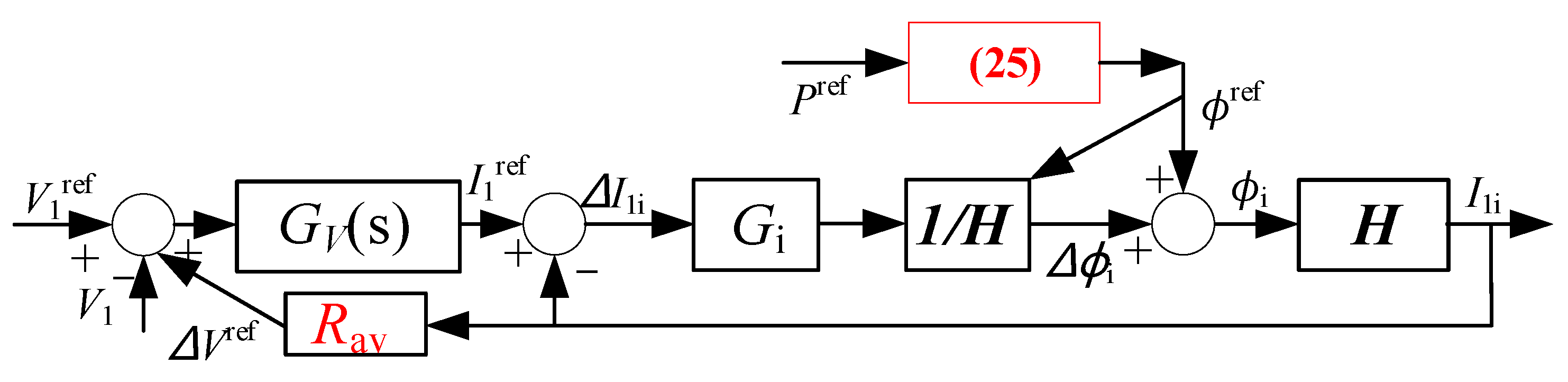
3.2.3. DC-Link Voltage Closed-Loop Control
3.2.4. Current Closed-Loop Control and Modulation
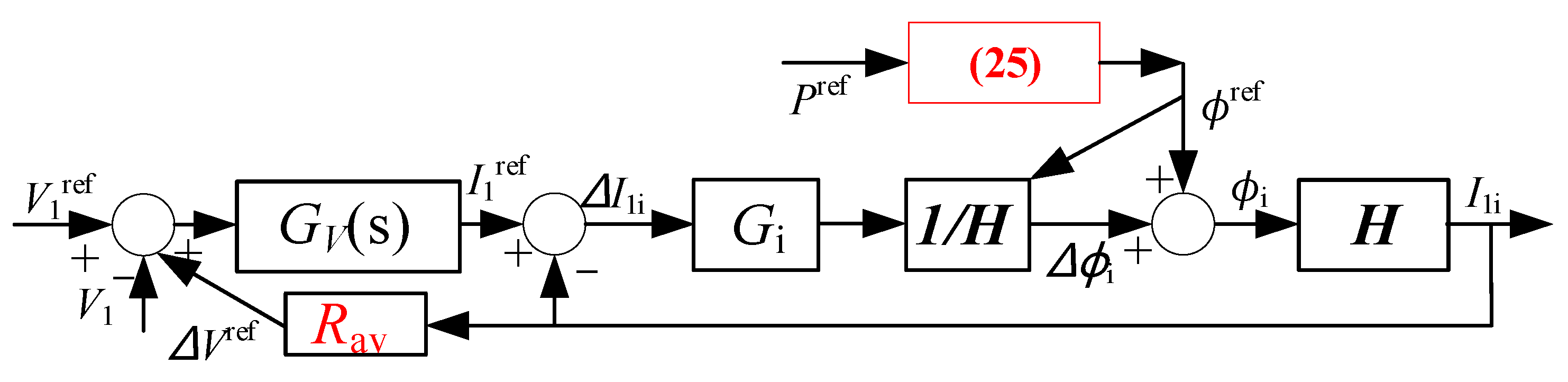
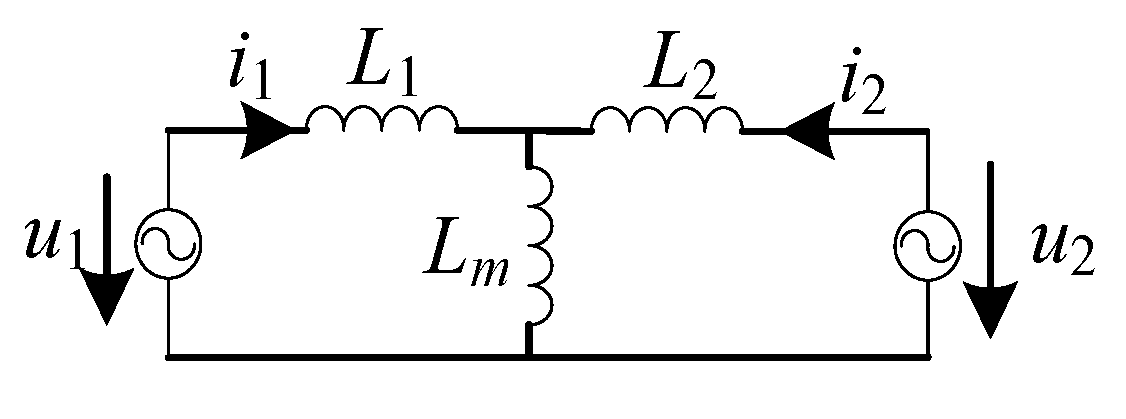
4. Operation Principle and Control of DC/DC Converters
5. Experiments
5.1. The Experimental Procedures
- (1)
- To clarify the purpose of the experiment, the proposed MP-PC aims to balance the power of the railway traction system while absorbing new energy on the spot.
- (2)
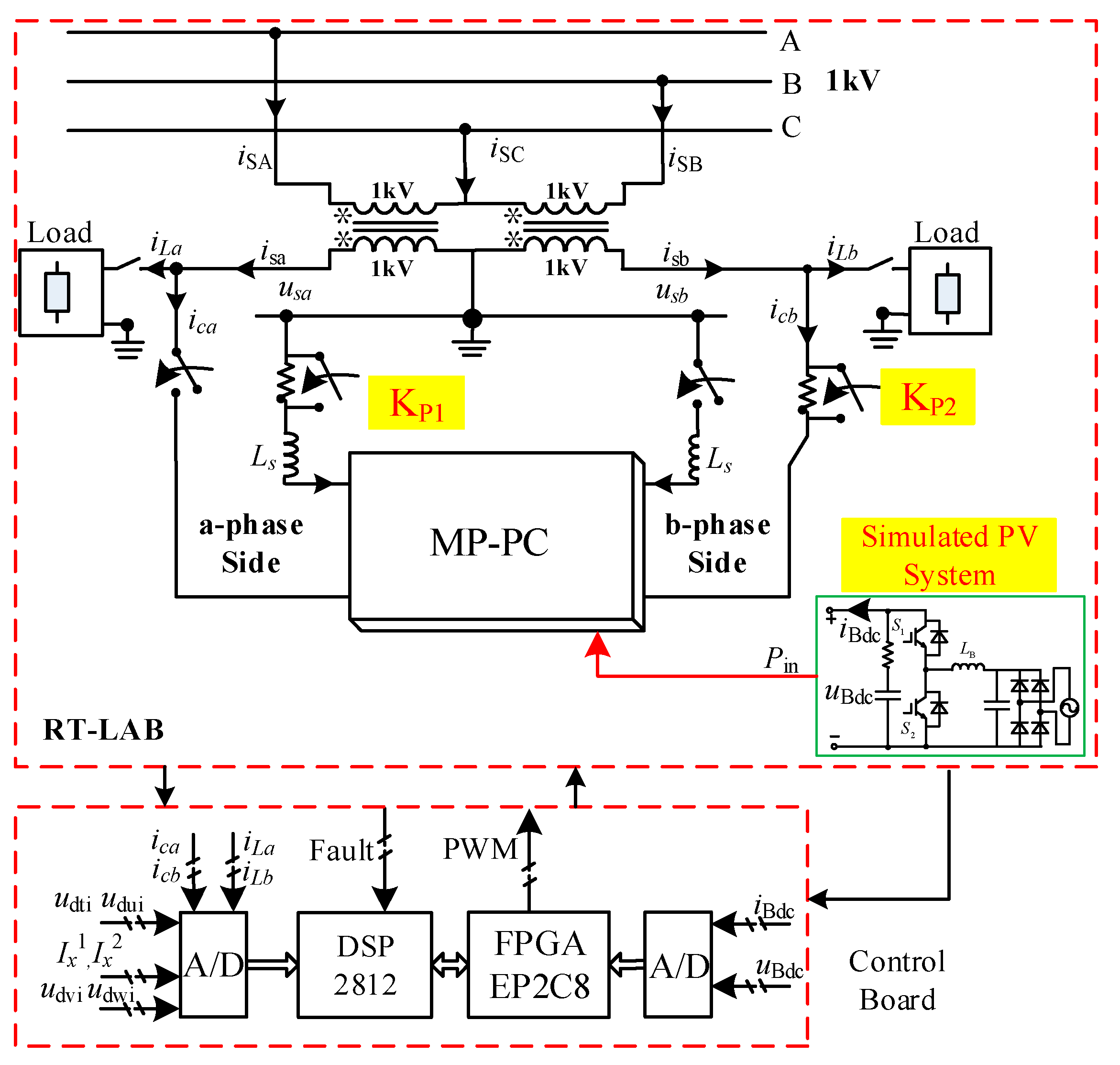
- Corresponding models are built in RT-LAB based on the MP-PC structure in this article, including dual active bridge modules and full-bridge MMC modules.
- (3)
- The control system is designed based on the model, including the MMC sub-module control part, railway power control part, new energy management part, and design, and the control parameters are debugged.
- (4)
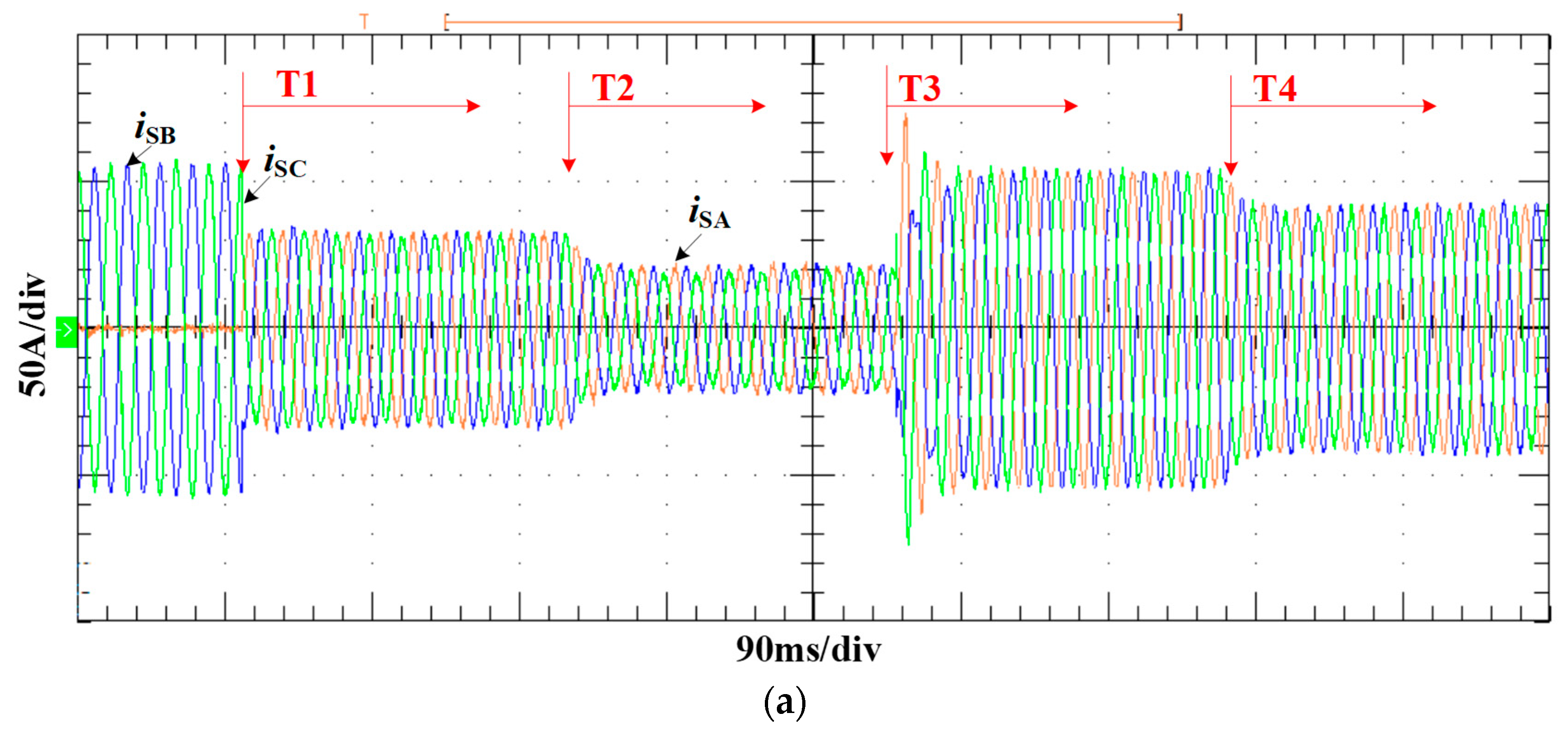
- According to the operation situations of the railway traction system, disturbances in the load and new energy modules are set up.
- (5)
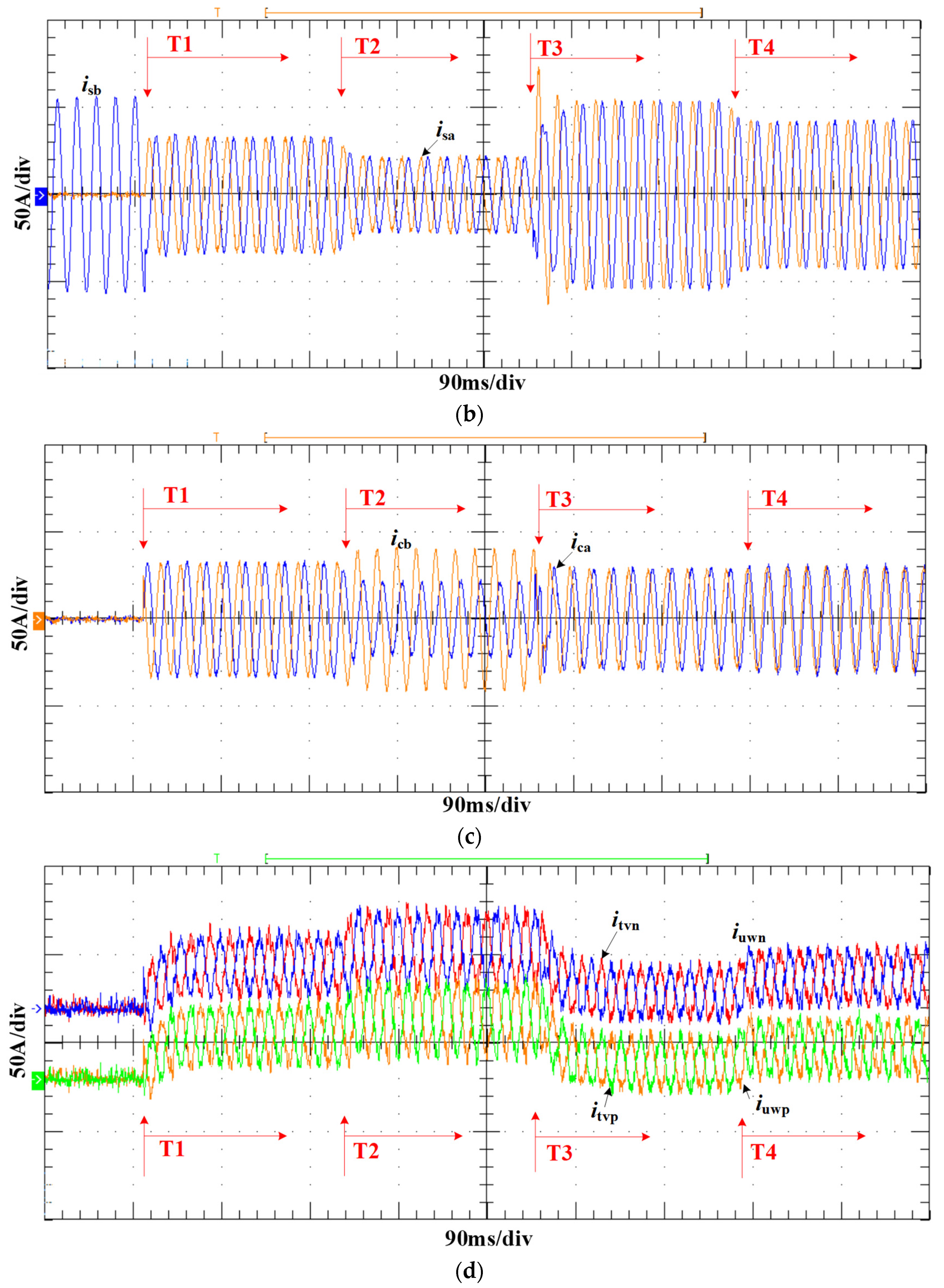
- The operation performance of MP-PC is analyzed according to the experimental waveforms and data, and experimental conclusions are drawn.
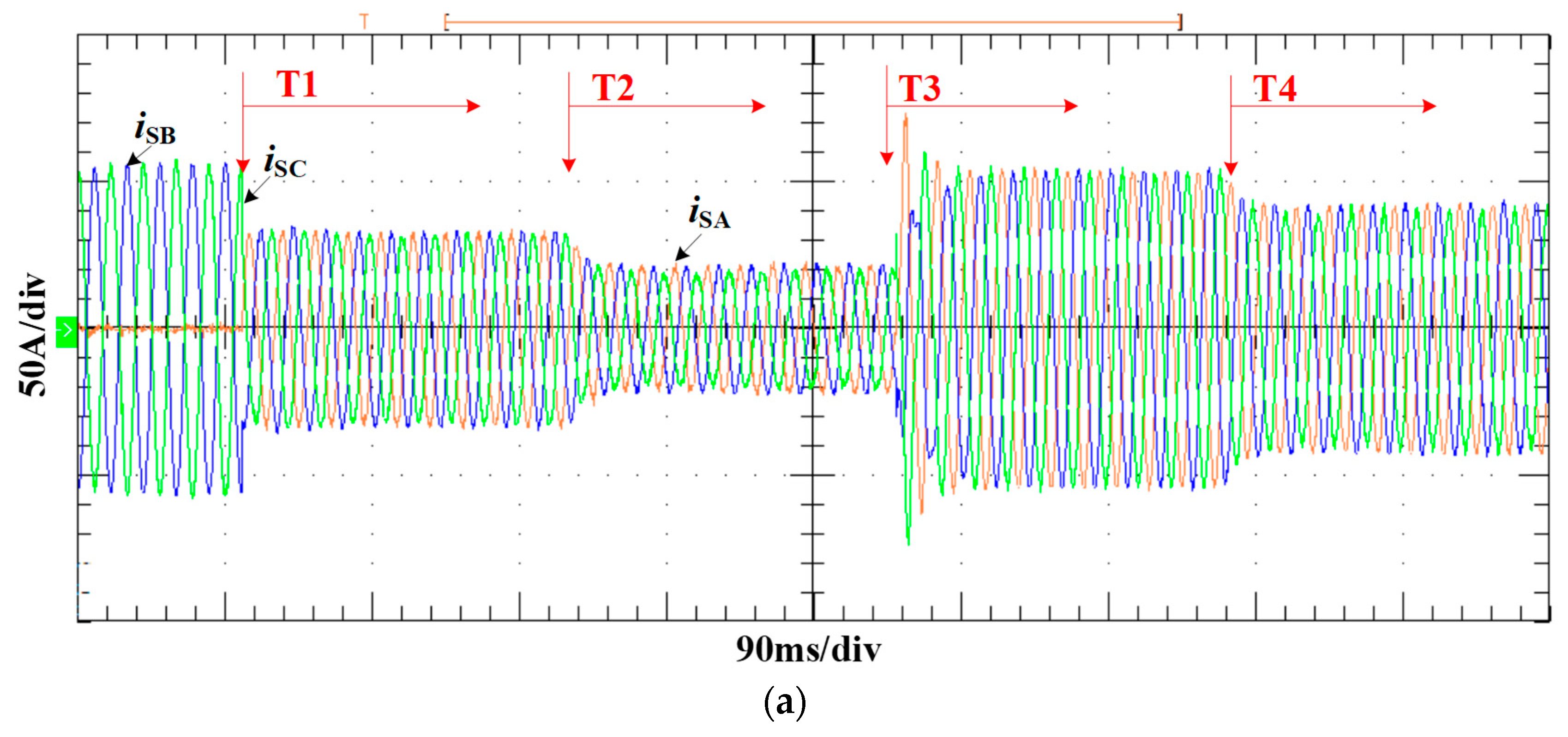
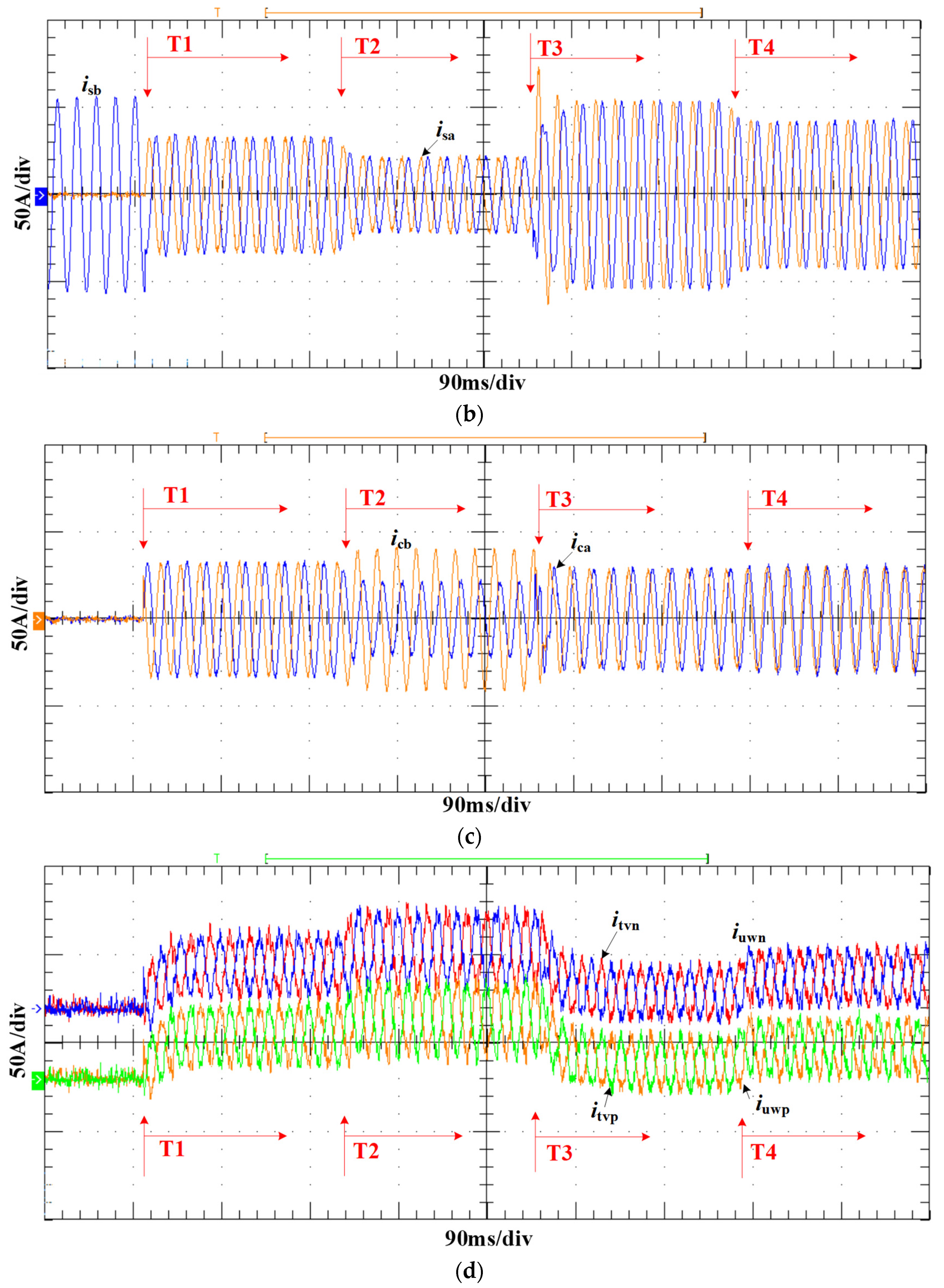
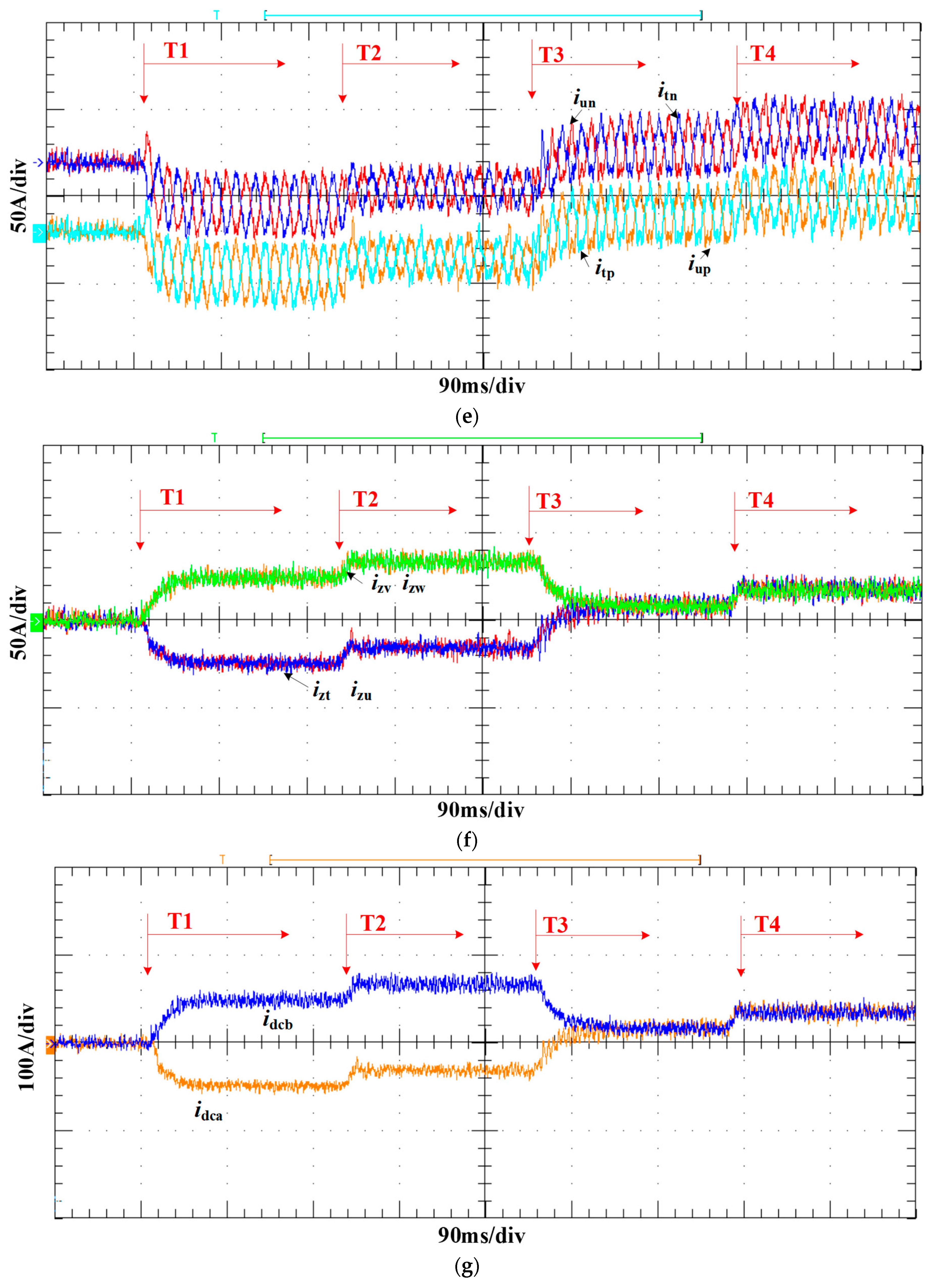
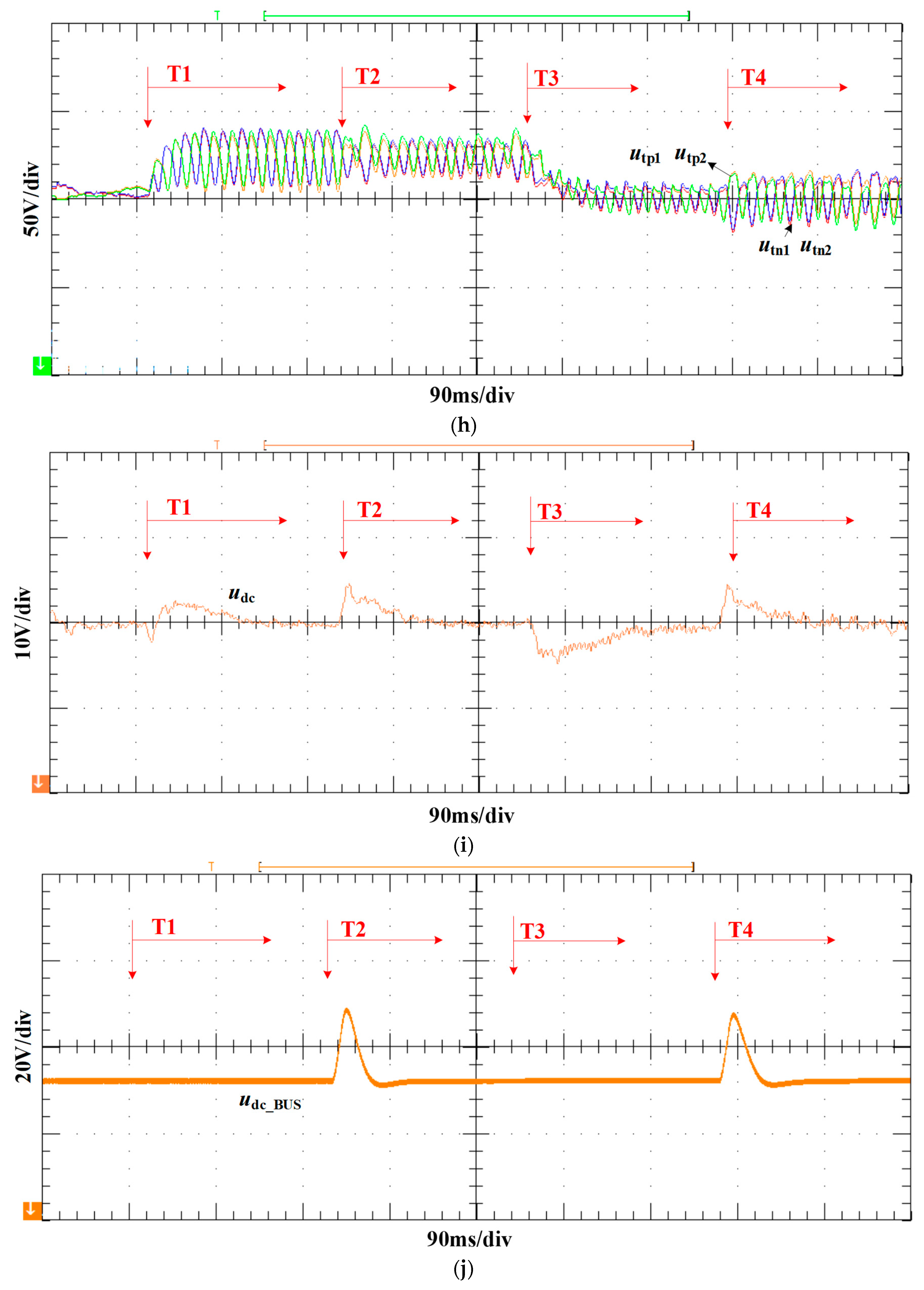
5.2. Case 1: Power Change of Simulated Loads
5.3. Case 2: The Power Change of PV System
5.4. Experimental Result
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wu, D.; Tang, F.; Dragicevic, T.; Vasquez, J.C.; Guerrero, J. A Control Architecture to Coordinate Renewable Energy Sources and Energy Storage Systems in Islanded Microgrids. IEEE Trans. Smart Grid 2014, 6, 1156–1166. [Google Scholar] [CrossRef] [Green Version]
- Fernandez, L.P.; Roman, T.G.S.; Cossent, R.; Domingo, C.M.; Frias, P. Assessment of the Impact of Plug-in Electric Vehicles on Distribution Networks. IEEE Trans. Power Syst. 2011, 26, 206–213. [Google Scholar] [CrossRef]
- Guerrero, J.; Blaabjerg, F.; Zhelev, T.; Hemmes, K.; Monmasson, E.; Jemei, S.; Comech, M.P.; Granadino, R.; Frau, J.I. Distributed Generation: Toward a New Energy Paradigm. IEEE Ind. Electron. Mag. 2010, 4, 52–64. [Google Scholar] [CrossRef]
- Liu, X.; Loh, P.C.; Wang, P.; Blaabjerg, F.; Tang, Y.; Al-Ammar, E. Distributed Generation Using Indirect Matrix Converter in Reverse Power Mode. IEEE Trans. Power Electron. 2012, 28, 1072–1082. [Google Scholar] [CrossRef]
- Leander, P.; Ostlund, S. A Concept for an HVDC Traction System. In Proceedings of the International Conference on Main Line Railway Electrification, London, UK, 25–28 September 1989; pp. 169–173. [Google Scholar]
- Gomez-Exposito, A.; Mauricio, J.M.; Maza-Ortega, J.M. VSC-Based MVDC Railway Electrification System. IEEE Trans. Power Deliv. 2013, 29, 422–431. [Google Scholar] [CrossRef]
- Yang, X.; Hu, H.; Ge, Y.; Aatif, S.; He, Z.; Gao, S.; Salman, A. An Improved Droop Control Strategy for VSC-Based MVDC Traction Power Supply System. IEEE Trans. Ind. Appl. 2018, 54, 5173–5186. [Google Scholar] [CrossRef]
- Xu, Q.; Ma, F.; He, Z.; Chen, Y.; Guerrero, J.M.; Luo, A.; Li, Y.; Yue, Y. Analysis and Comparison of Modular Railway Power Conditioner for High-Speed Railway Traction System. IEEE Trans. Power Electron. 2017, 32, 6031–6048. [Google Scholar] [CrossRef] [Green Version]
- Ma, F.; Wang, X.; Deng, L.; Zhu, Z.; Xu, Q.; Xie, N. Multiport Railway Power Conditioner and Its Management Control Strategy with Renewable Energy Access. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 8, 1405–1418. [Google Scholar] [CrossRef]
- Deng, W.; Dai, C.; Chen, W.; Gao, S. Experimental Investigation and Adaptability Analysis of Hybrid Traction Power Supply System Integrated with Photovoltaic Sources in AC-Fed Railways. IEEE Trans. Transp. Electrif. 2021, 7, 1750–1764. [Google Scholar] [CrossRef]
- Chen, J.; Hu, H.; Ge, Y.; Wang, K.; Huang, W.; He, Z. An Energy Storage System for Recycling Regenerative Braking Energy in High-Speed Railway. IEEE Trans. Power Deliv. 2021, 36, 320–330. [Google Scholar] [CrossRef]
- Torkzadeh, R.; Eliassi, M.; Mazidi, P.; Rodriguez, P.; Brnobić, D.; Krommydas, K.F.; Stratigakos, A.C.; Dikeakos, C.; Michael, M.; Tapakis, R.; et al. Synchrophasor Based Monitoring System for Grid Interactive Energy Storage System Control. In Flexitranstore; Németh, B., Ekonomou, L., Eds.; Lecture Notes in Electrical Engineering; Springer International Publishing: Cham, Switzerland, 2020; Volume 610, pp. 95–106. ISBN 978-3-030-37817-2. [Google Scholar]
- Zhang, Z.; Wu, B.; Kang, J.; Luo, L. A Multi-Purpose Balanced Transformer for Railway Traction Applications. IEEE Trans. Power Deliv. 2009, 24, 711–718. [Google Scholar] [CrossRef]
- Gazafrudi, S.M.M.; Langeroudi, A.T.; Fuchs, E.F.; Al-Haddad, K. Power Quality Issues in Railway Electrification: A Comprehensive Perspective. IEEE Trans. Ind. Electron. 2014, 62, 3081–3090. [Google Scholar] [CrossRef]
- Hu, H.; He, Z.; Li, X.; Wang, K.; Gao, S. Power-Quality Impact Assessment for High-Speed Railway Associated with High-Speed Trains Using Train Timetable—Part I: Methodology and Modeling. IEEE Trans. Power Deliv. 2015, 31, 693–703. [Google Scholar] [CrossRef]
- Luo, S. A review of distributed power systems part I: DC distributed power system. IEEE Aerosp. Electron. Syst. Mag. 2005, 20, 5–16. [Google Scholar] [CrossRef]
- Dragicevic, T.; Lu, X.; Vasquez, J.C.; Guerrero, J. DC Microgrids—Part II: A Review of Power Architectures, Applications, and Standardization Issues. IEEE Trans. Power Electron. 2016, 31, 3528–3549. [Google Scholar] [CrossRef] [Green Version]
- Liu, X.; Wang, P.; Loh, P.C. A Hybrid AC/DC Microgrid and Its Coordination Control. IEEE Trans. Smart Grid 2011, 2, 278–286. [Google Scholar] [CrossRef] [Green Version]
- Shamsi, P.; Fahimi, B. Dynamic Behavior of Multiport Power Electronic Interface Under Source/Load Disturbances. IEEE Trans. Ind. Electron. 2013, 60, 4500–4511. [Google Scholar] [CrossRef]
- Guerrero, J.; Matas, J.; de Vicuña, L.G.; Castilla, M.; Miret, J. Decentralized Control for Parallel Operation of Distributed Generation Inverters Using Resistive Output Impedance. IEEE Trans. Ind. Electron. 2007, 54, 994–1004. [Google Scholar] [CrossRef]
- Zhao, C.; Round, S.D.; Kolar, J.W. An Isolated Three-Port Bidirectional DC-DC Converter with Decoupled Power Flow Management. IEEE Trans. Power Electron. 2008, 23, 2443–2453. [Google Scholar] [CrossRef]
- Pena-Alzola, R.; Gohil, G.; Mathe, L.; Liserre, M.; Blaabjerg, F. Review of modular power converters solutions for smart transformer in distribution system. In Proceedings of the 2013 IEEE Energy Conversion Congress and Exposition, Denver, CO, USA, 15–19 September 2013; pp. 380–387. [Google Scholar]
- Liserre, M.; Buticchi, G.; Andresen, M.; De Carne, G.; Costa, L.; Zou, Z.-X. The Smart Transformer: Impact on the Electric Grid and Technology Challenges. IEEE Ind. Electron. Mag. 2016, 10, 46–58. [Google Scholar] [CrossRef] [Green Version]
- Huber, J.E.; Kolar, J.W. Solid-State Transformers: On the Origins and Evolution of Key Concepts. IEEE Ind. Electron. Mag. 2016, 10, 19–28. [Google Scholar] [CrossRef]
- Kolar, J.W.; Ortiz, G. Solid-State-Transformers: Key Components of Future Traction and Smart Grid Systems. In Proceedings of the International Power Electronics Conference—ECCE Asia (IPEC 2014), Hiroshima, Japan, 18–21 May 2014. [Google Scholar]
- She, X.; Huang, A.Q.; Burgos, R. Review of Solid-State Transformer Technologies and Their Application in Power Distribution Systems. IEEE J. Emerg. Sel. Top. Power Electron. 2013, 1, 186–198. [Google Scholar] [CrossRef]
- Drabek, P.; Peroutka, Z.; Pittermann, M.; Cedl, M. New Configuration of Traction Converter with Medium-Frequency Transformer Using Matrix Converters. IEEE Trans. Ind. Electron. 2011, 58, 5041–5048. [Google Scholar] [CrossRef]
- Hafez, B.; Krishnamoorthy, H.S.; Enjeti, P.; Ahmed, S.; Pitel, I.J. Medium voltage power distribution architecture with medium frequency isolation transformer for data centers. In Proceedings of the 2014 IEEE Applied Power Electronics Conference and Exposition—APEC 2014, Fort Worth, TX, USA, 16–20 March 2014; pp. 3485–3489. [Google Scholar]
- Tolbert, L.; Habetler, T. Novel multilevel inverter carrier-based PWM method. IEEE Trans. Ind. Appl. 1999, 35, 1098–1107. [Google Scholar] [CrossRef]
- Glinka, M. Prototype of multiphase modular-multilevel-converter with 2 MW power rating and 17-level-output-voltage. In Proceedings of the 2004 IEEE 35th Annual Power Electronics Specialists Conference (IEEE Cat. No.04CH37551), Aachen, Germany, 20–25 June 2004; pp. 2572–2576. [Google Scholar]
- Andresen, M.; Ma, K.; De Carne, G.; Buticchi, G.; Blaabjerg, F.; Liserre, M. Thermal Stress Analysis of Medium-Voltage Converters for Smart Transformers. IEEE Trans. Power Electron. 2017, 32, 4753–4765. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Huang, A.Q.; Sung, W.; Liu, Y.; Baliga, B.J. Smart grid technologies. IEEE Ind. Electron. Mag. 2009, 3, 16–23. [Google Scholar] [CrossRef]
- Bifaretti, S.; Zanchetta, P.; Watson, A.; Tarisciotti, L.; Clare, J. Advanced Power Electronic Conversion and Control System for Universal and Flexible Power Management. IEEE Trans. Smart Grid 2011, 2, 231–243. [Google Scholar] [CrossRef]
- Lai, J.; Maitra, A.; Mansoor, A.; Goodman, F.R. Multilevel intelligent universal transformer for medium voltage applications. In Proceedings of the Fourtieth IAS Annual Meeting. Conference Record of the 2005 Industry Applications Conference, Hong Kong, China, 2–6 October 2005; Volume 3, p. 1893. [Google Scholar]
- Zhao, Y.; Dai, N.; An, B. Application of Three-Phase Modular Multilevel Converter (MMC) in Co-Phase Traction Power Supply System. In Proceedings of the 2014 IEEE Conference and Expo Transportation Electrification Asia-Pacific (ITEC Asia-Pacific), Beijing, China, 31 August–3 September 2014; pp. 1–6. [Google Scholar]
- Song, S.; Liu, J.; Ouyang, S.; Chen, X. A Modular Multilevel Converter Based Railway Power Conditioner for Power Balance and Harmonic Compensation in Scott Railway Traction System. In Proceedings of the 2016 IEEE 8th International Power Electronics and Motion Control Conference (IPEMC-ECCE Asia), Hefei, China, 22–26 May 2016; pp. 2412–2416. [Google Scholar]
- Fan, B.; Wang, K.; Zheng, Z.; Xu, L.; Li, Y. Optimized Branch Current Control of Modular Multilevel Matrix Converters Under Branch Fault Conditions. IEEE Trans. Power Electron. 2018, 33, 4578–4583. [Google Scholar] [CrossRef]
- Ma, D.; Chen, W.; Xue, C.; Fu, X.; Wei, X.; Zhu, W. AC-DC Power Electronic Transformer with Low-voltage DC Bus and Strategy of Short-circuit Fault Ride-through. Automation of electric power systems. 2019, 34, 158–166. [Google Scholar]
- Tanta, M.; Cunha, J.; Barros, L.A.M.; Monteiro, V.; Pinto, J.G.O.; Martins, A.P.; Afonso, J.L. Experimental Validation of a Reduced-Scale Rail Power Conditioner Based on Modular Multilevel Converter for AC Railway Power Grids. Energies 2021, 14, 484. [Google Scholar] [CrossRef]
- Yang, X. Research on Modular Multilevel Converter (MMC). Ph.D. Thesis, Beijing Jiaotong University, Beijing, China, 2012. [Google Scholar]
- Zhao, B.; Song, Q.; Li, J.; Liu, W.; Liu, G.; Zhao, Y. High-Frequency-Link DC Transformer Based on Switched Capacitor for Medium-Voltage DC Power Distribution Application. IEEE Trans. Power Electron. 2015, 31, 1. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Parameter | Value |
|---|---|---|
| S | Locomotive capacity | 40/kW |
| Urms | Traction grid voltage | 1000/V |
| fo | Grid frequency | 50/Hz |
| Full-bridge-based MMC | ||
| N | Module number of per upper/lower arm | 2 |
| L | arm inductance | 2/mH |
| Ls | filter inductance | 2/mF |
| Ccell | Submodule capacitance | 5/mF |
| fc | Carrier frequency for MMC | 2/kHz |
| USM_ref | Capacitor voltage of each cell | 500/V |
| Udc_ref | Dc-link voltage of MMC | 400 V |
| C | Dc-link Capacitance of MMC | 10/mF |
| DC/DC converters | ||
| n1:n2 | Transformation Ratio of DAB | 1: 1 |
| M | Module number of DAB | 2 |
| Lr | Leaking inductance | 0.03/mH |
| V1,V2 | Port voltage for DAB converters | 200 V |
| fs | Carrier frequency for dc/dc converters | 10/kHz |
| Cp | Port capacitance for dc/dc converters | 5/mF |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, F.; Kuang, Y.; Wang, Z.; Huang, G.; Kuang, D.; Zhang, C. Multi-Port and -Functional Power Conditioner and Its Control Strategy with Renewable Energy Access for a Railway Traction System. Energies 2021, 14, 6146. https://doi.org/10.3390/en14196146
Ma F, Kuang Y, Wang Z, Huang G, Kuang D, Zhang C. Multi-Port and -Functional Power Conditioner and Its Control Strategy with Renewable Energy Access for a Railway Traction System. Energies. 2021; 14(19):6146. https://doi.org/10.3390/en14196146
Chicago/Turabian StyleMa, Fujun, Yulin Kuang, Zhengwen Wang, Gelin Huang, Dexing Kuang, and Cheng Zhang. 2021. "Multi-Port and -Functional Power Conditioner and Its Control Strategy with Renewable Energy Access for a Railway Traction System" Energies 14, no. 19: 6146. https://doi.org/10.3390/en14196146
APA StyleMa, F., Kuang, Y., Wang, Z., Huang, G., Kuang, D., & Zhang, C. (2021). Multi-Port and -Functional Power Conditioner and Its Control Strategy with Renewable Energy Access for a Railway Traction System. Energies, 14(19), 6146. https://doi.org/10.3390/en14196146