
Research on Energy Management Method of Plug-In Hybrid Electric Vehicle Based on Travel Characteristic Prediction




Abstract
:1. Introduction
2. Research on Travel Characteristic Prediction
2.1. Mileage Prediction Based on Historical Data
- (I)
- The GPS equipment is used to obtain the historical driving trajectory data of the vehicle, and the data is preprocessed to form the historical driving trajectory database;
- (II)
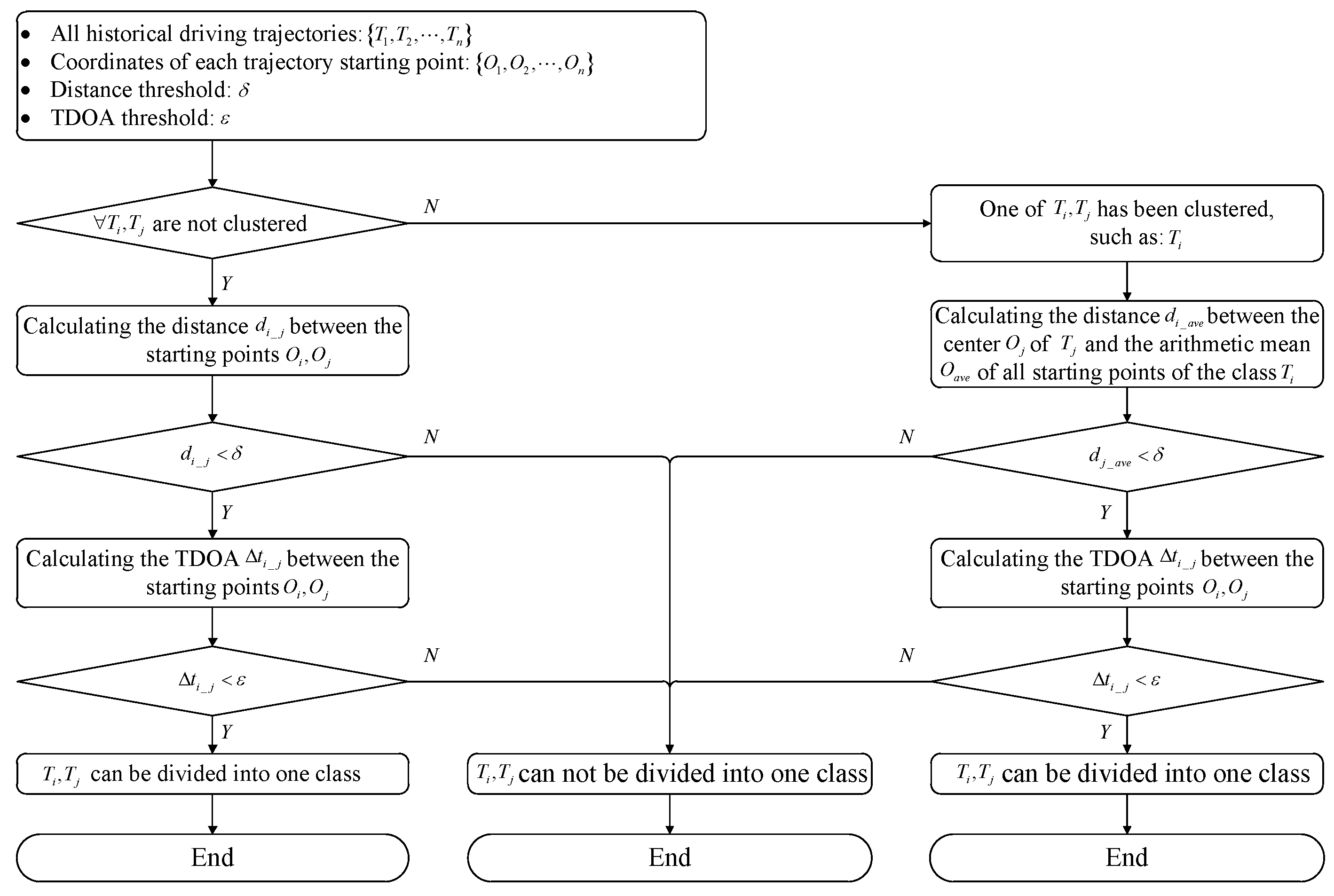
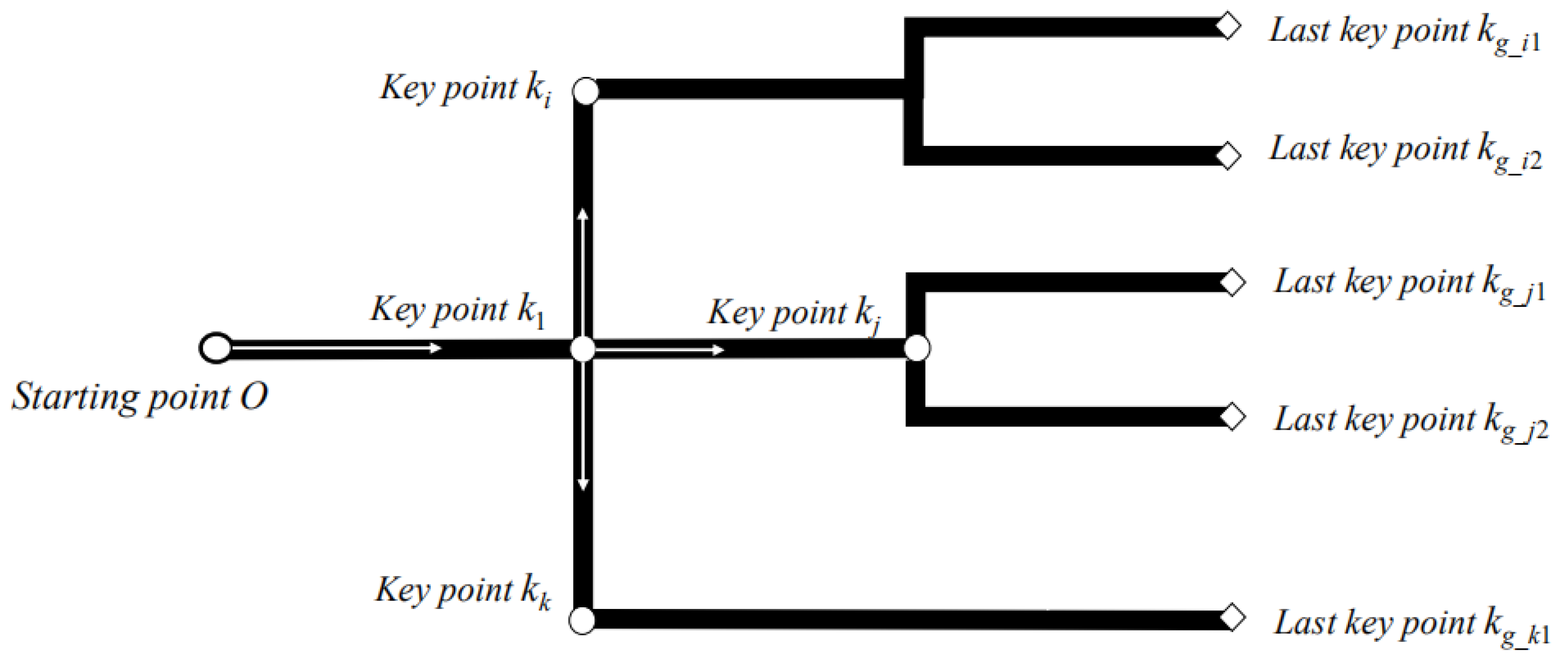
- Based on the path clustering algorithm, the starting point clustering and key point mining of each historical driving trajectory in the historical driving trajectory database are carried out, and the prediction model is established based on the key points;
- (III)
- At the beginning of travel, the starting point position information is obtained through GPS, and the travel trajectory is predicted according to the historical trajectory database;
- (IV)
- The current travel trajectory is identified based on key points, and the candidate prediction trajectory is dynamically updated when each key point is passed until the destination is reached, so as to complete the travel mileage prediction.
2.2. Cycle Prediction Based on GPS and ITS
2.2.1. Target Travel Cycle Prediction Considering Traffic Information
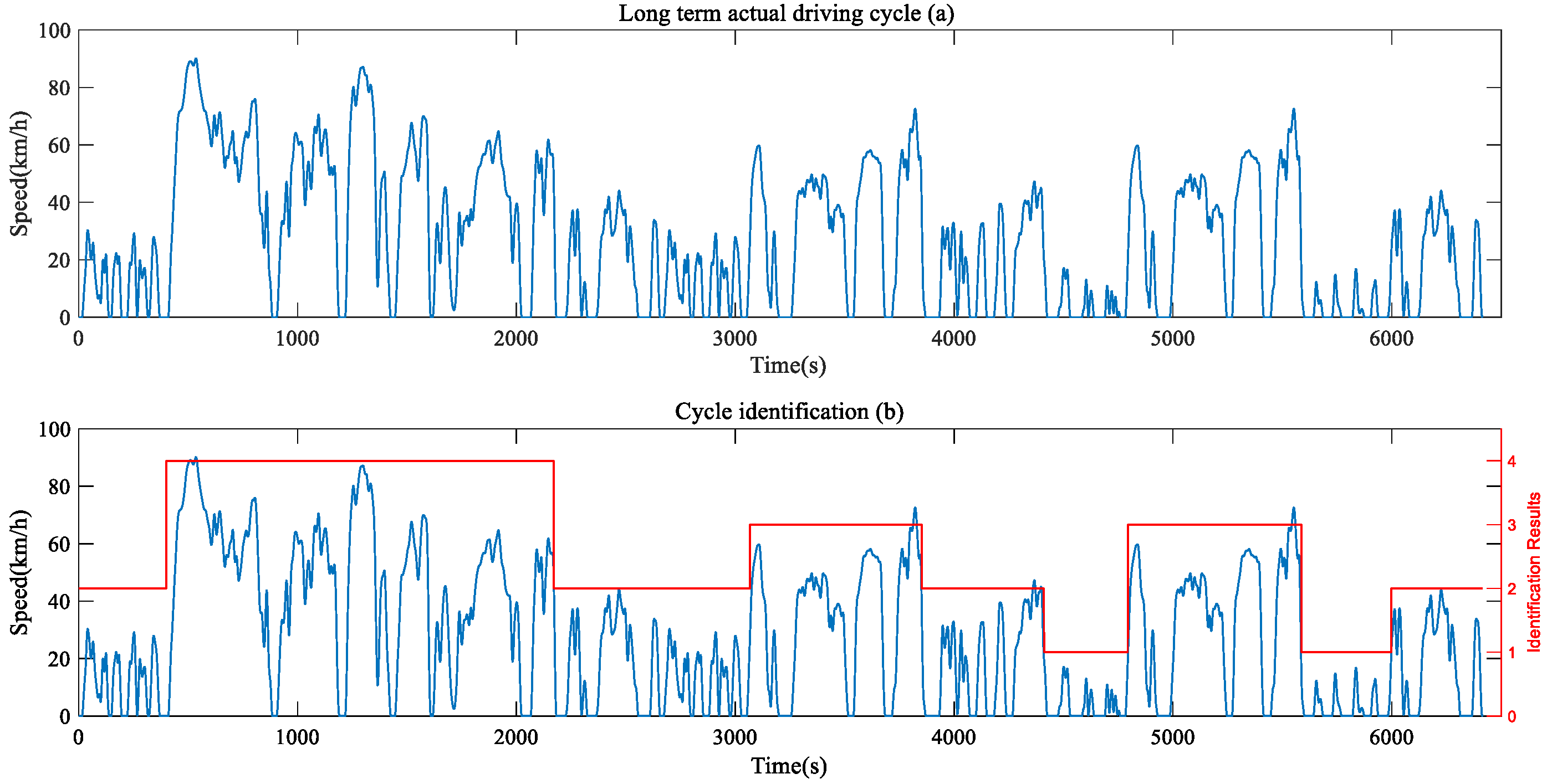
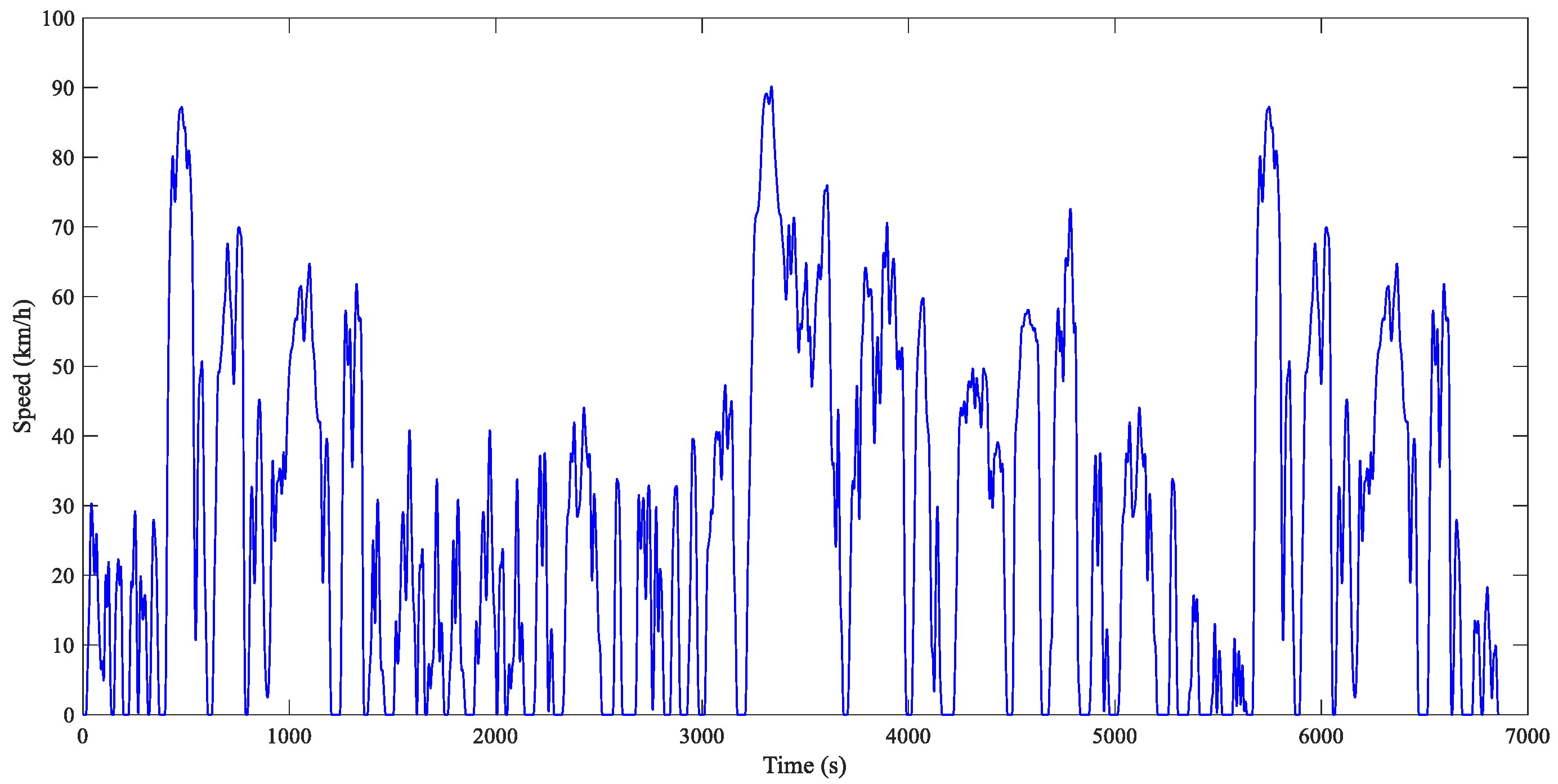
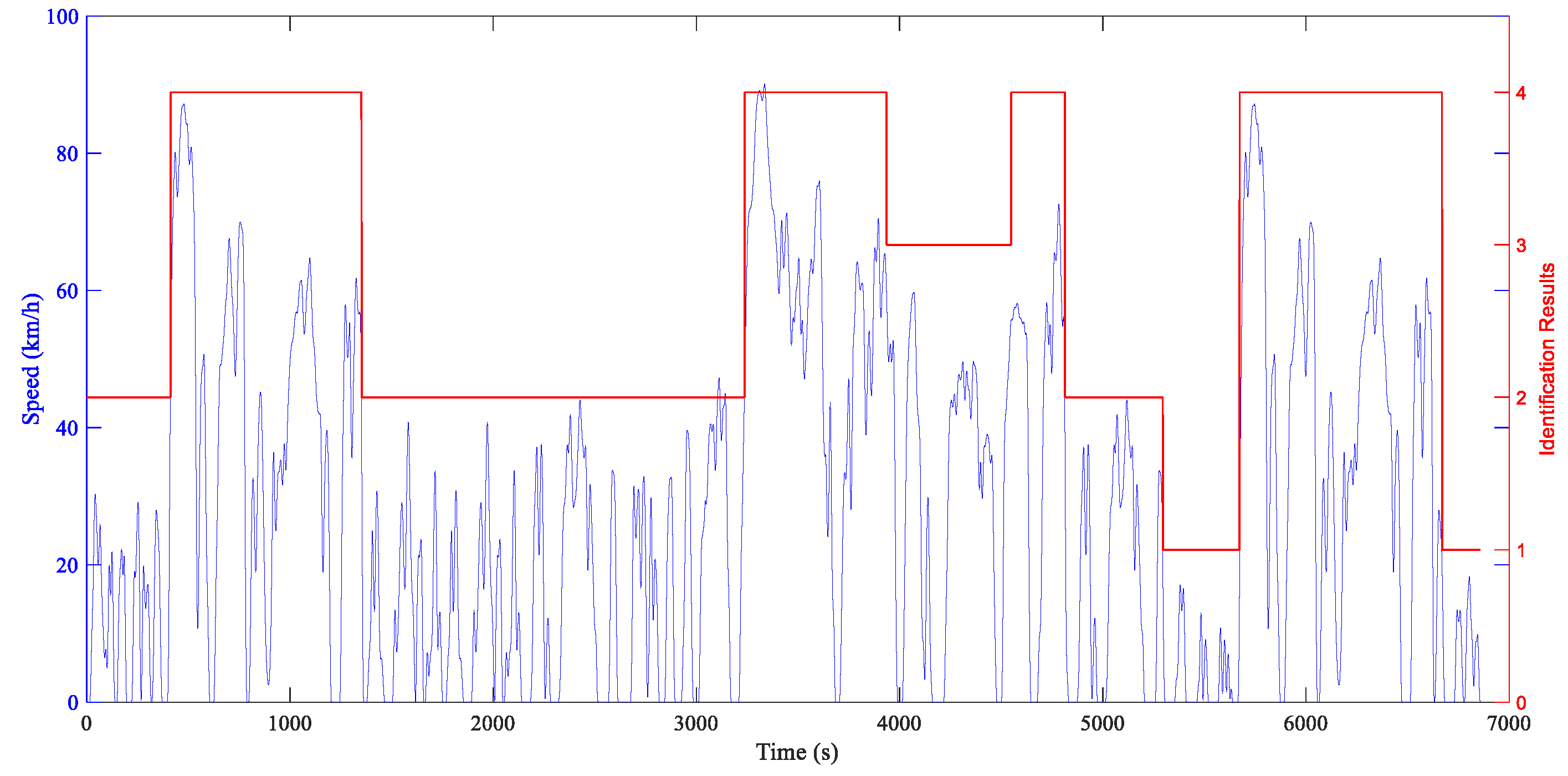
2.2.2. Cycle Classification and Identification
3. SOC Reference Trajectory Planning Algorithm
3.1. SOC Trajectory Planning Based on Mileage
3.2. SOC Trajectory Planning Based on Cycle
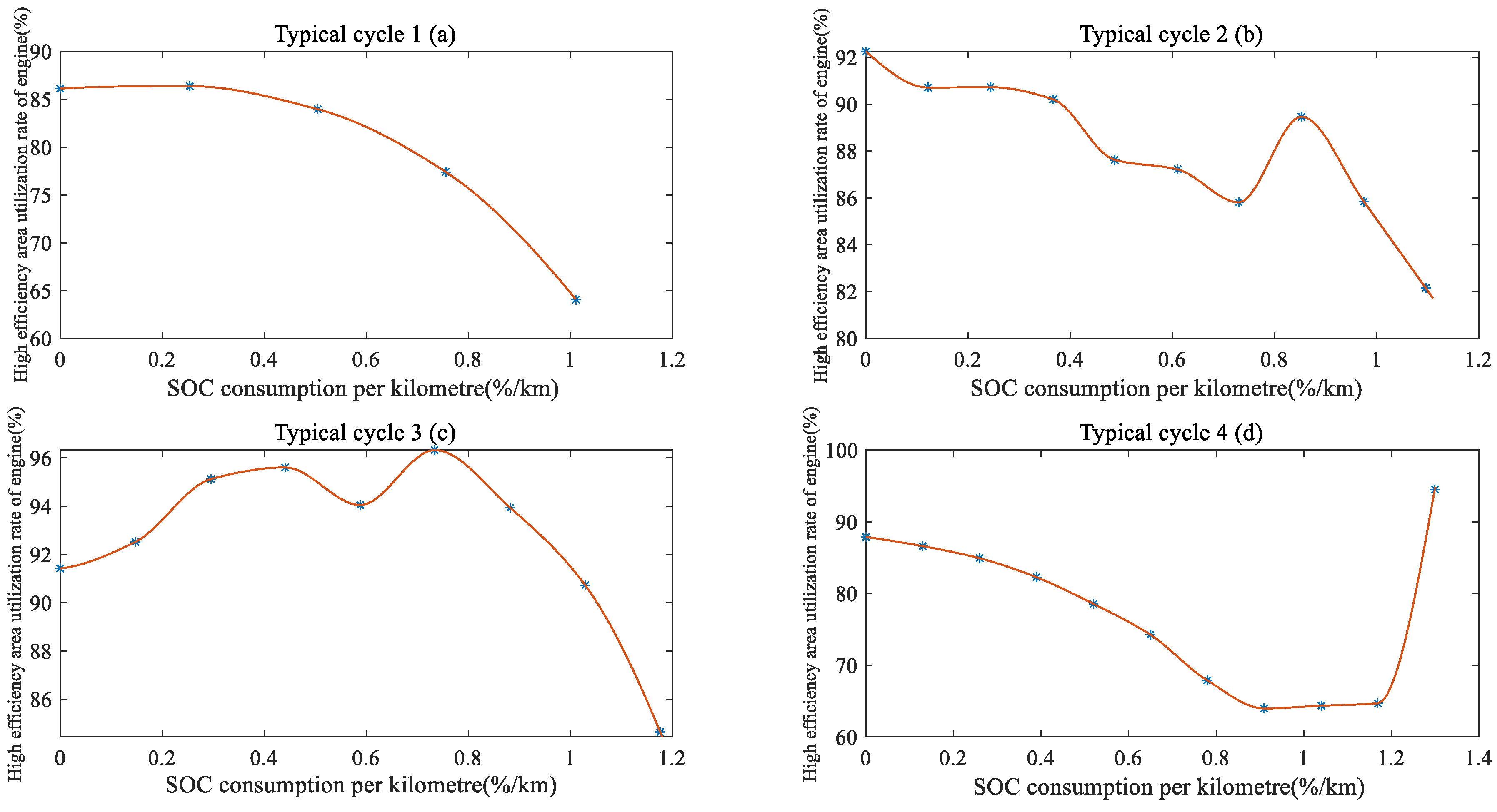
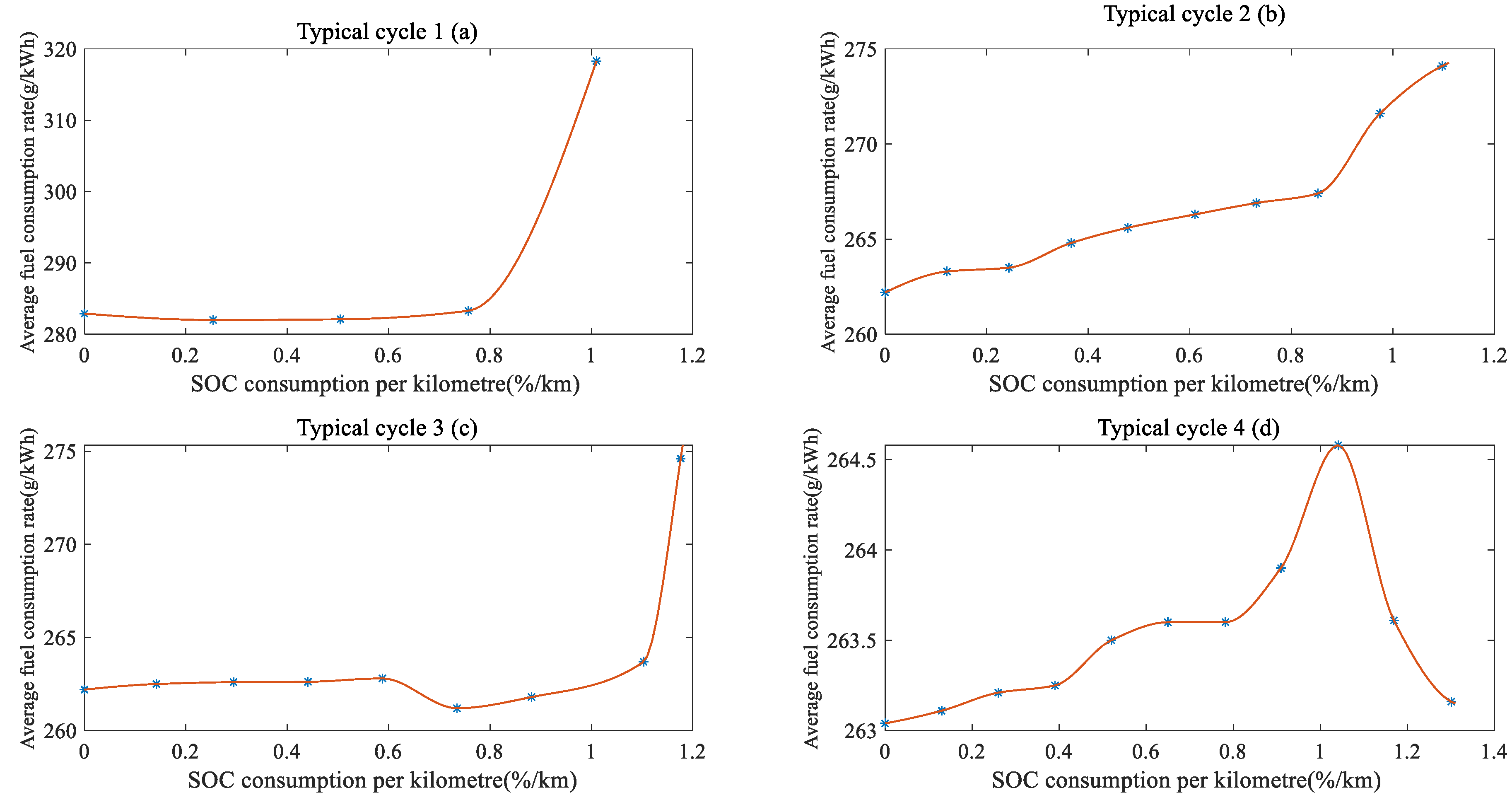
3.2.1. Analysis of SOC Consumption under Four Typical Cycles
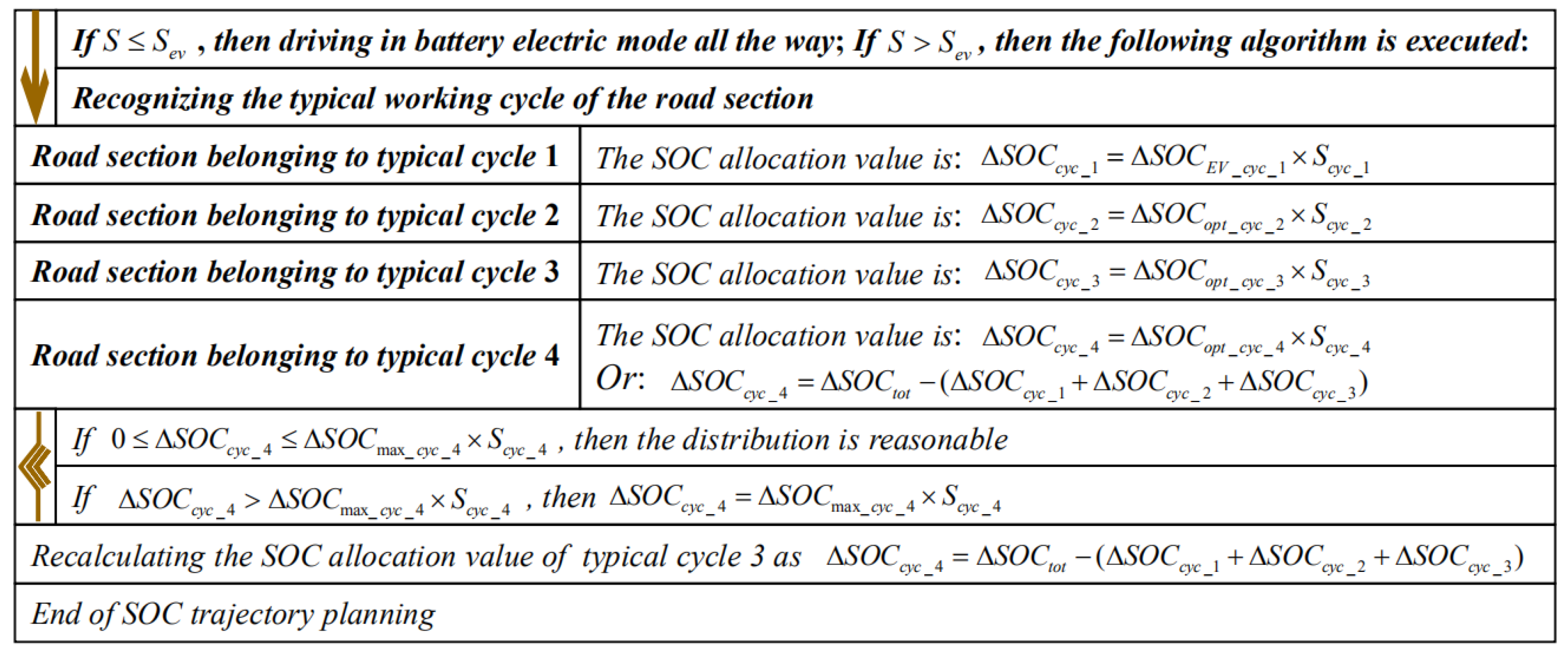
3.2.2. SOC Trajectory Planning Algorithm
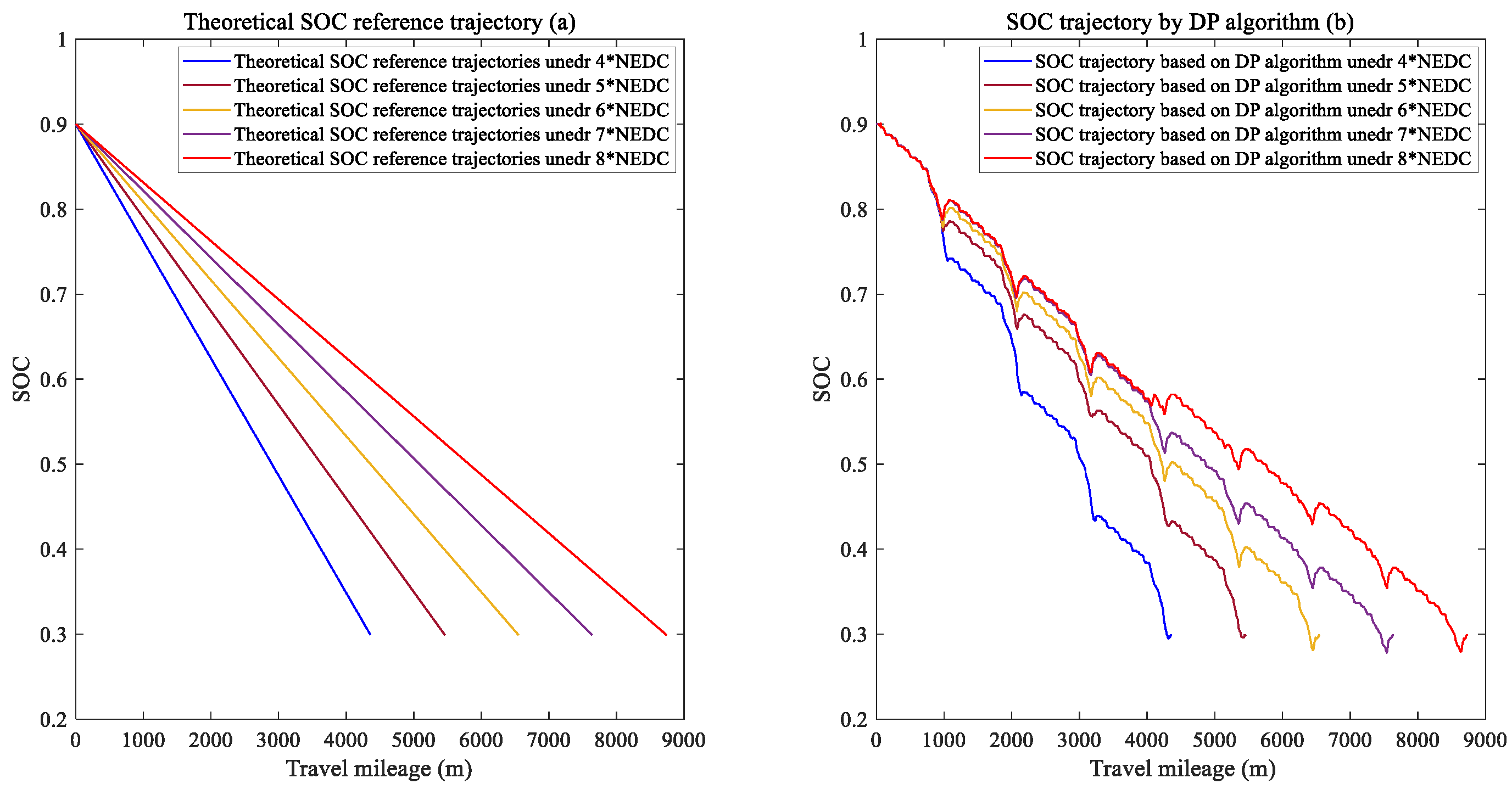
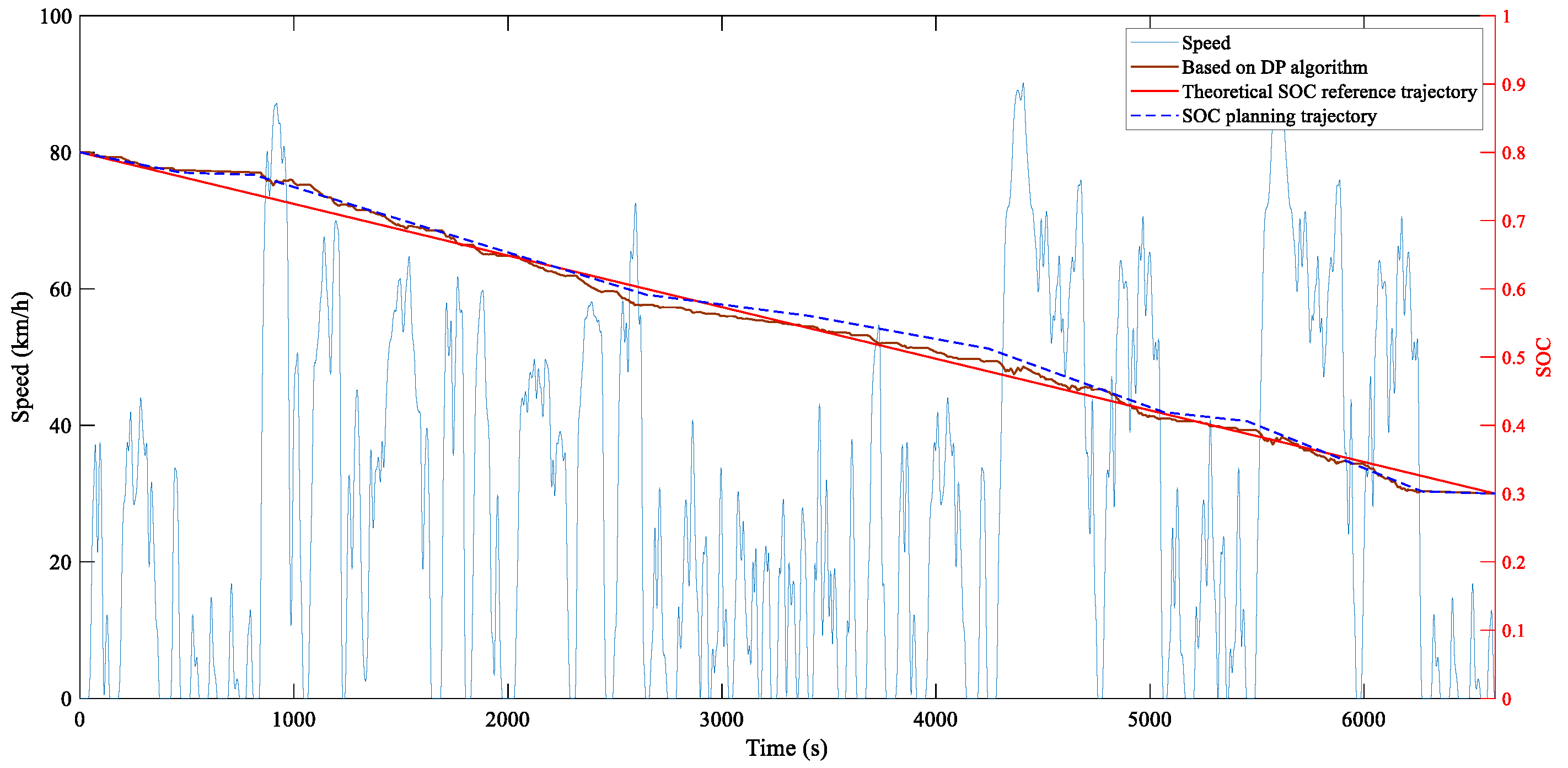
3.2.3. Verification of SOC Trajectory Planning Algorithm
4. Adaptive Energy Management Method of PHEV Based on Travel Characteristics Prediction
5. Conclusions
- (1)
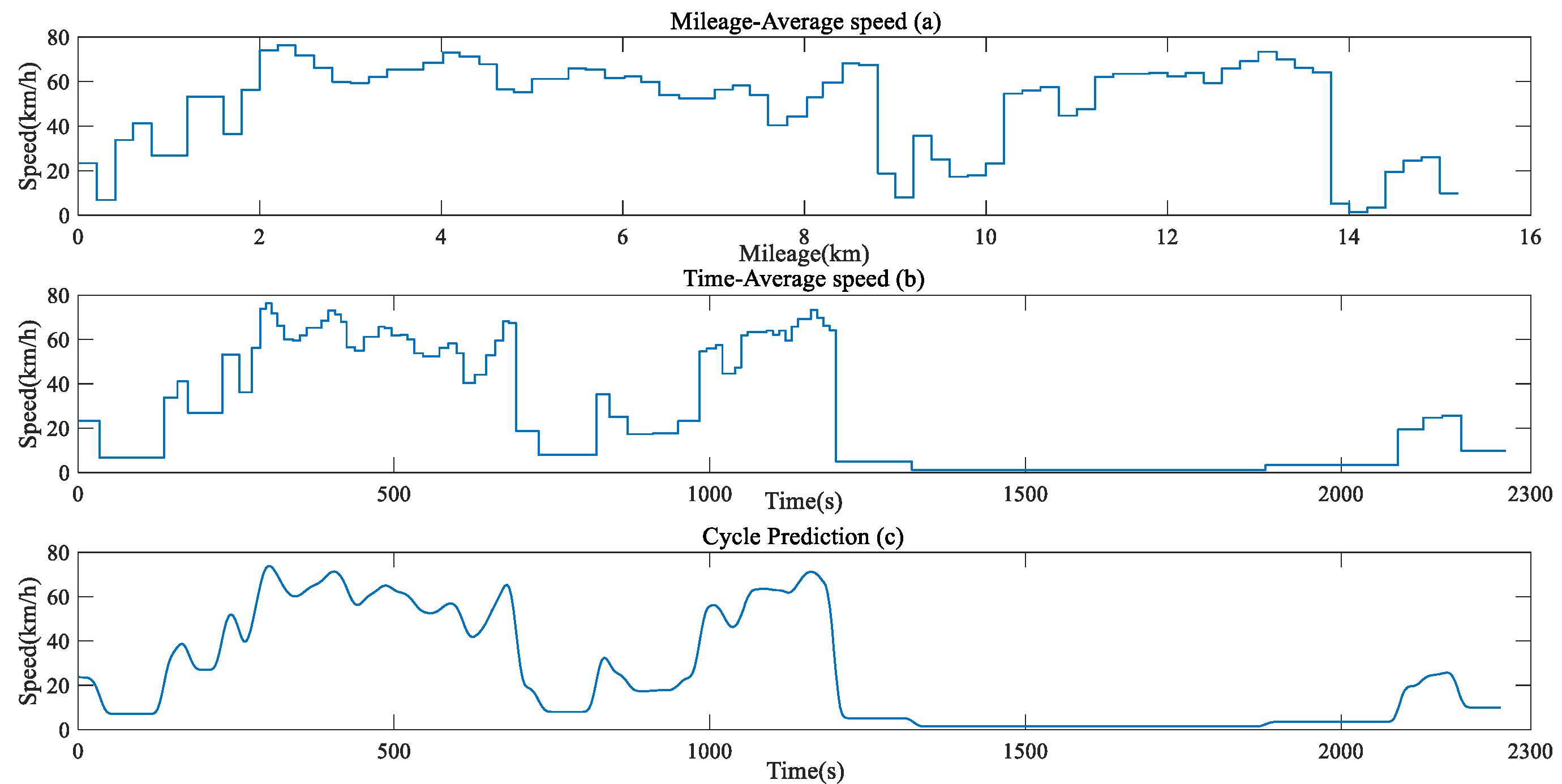
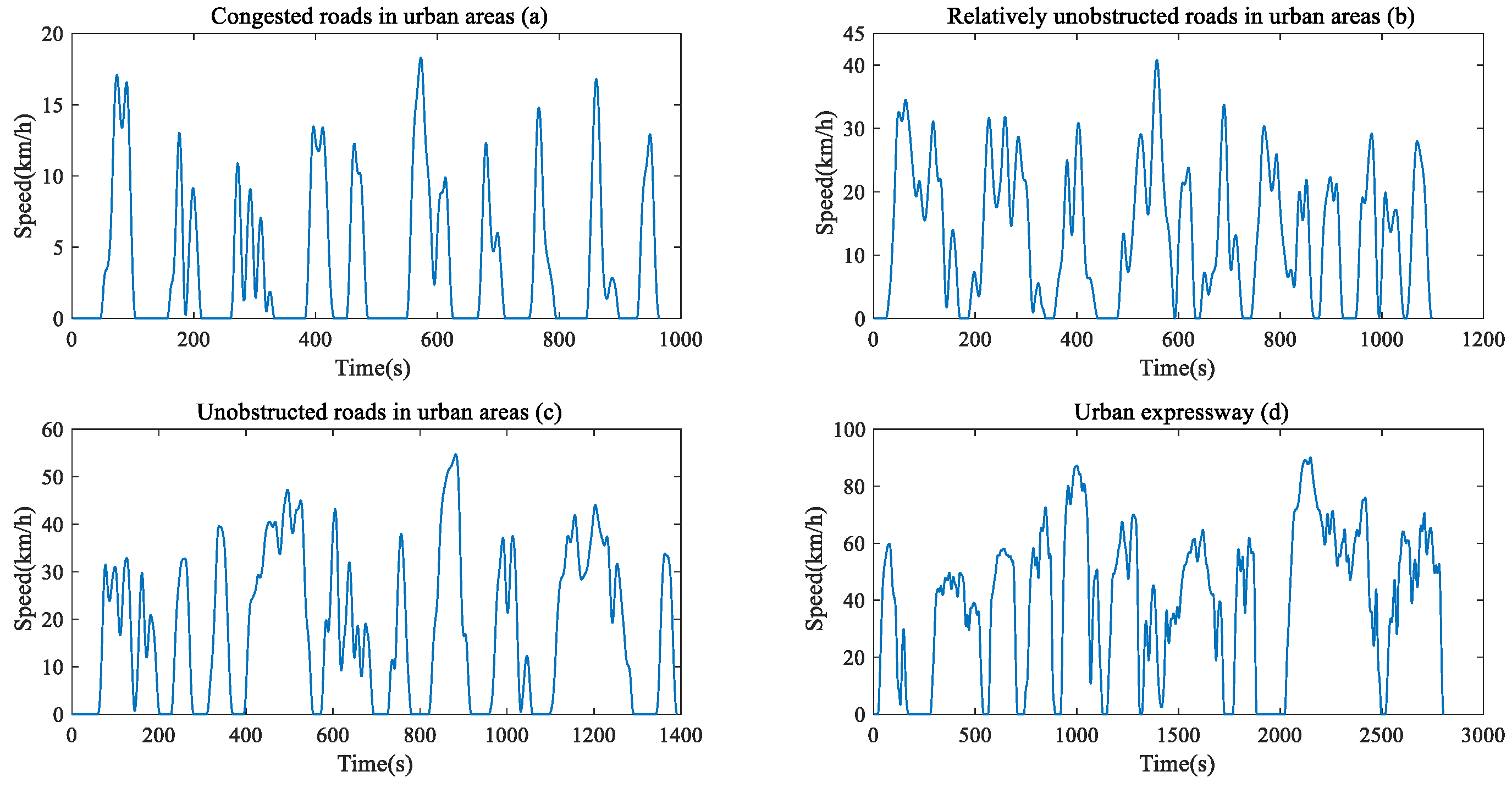
- Based on the collection and analysis of a specific driver’s driving trajectory data, a method for travel trajectory and mileage prediction, travel condition construction, identification and prediction including clustering the starting point of travel trajectory and mining key points to complete the prediction of travel trajectory and mileage is proposed. The historical travel data is processed, and the target travel cycles predicted by traffic information are considered, and the driving cycles predicted based on traffic information are classified and identified.
- (2)
- For when the driving mileage exceeds the battery electric mileage in the current SOC state, an SOC reference trajectory planning algorithm is established to make the SOC consumption trajectory closer to the optimal trajectory obtained by DP algorithm. For the four typical cycles obtained by the clustering algorithm, the SOC consumption law of different types of typical cycles and the corresponding engine work and fuel consumption are calculated, the SOC distribution law of the four typical cycles is determined, the SOC reference trajectory planning algorithm is formulated, and the rationality, accuracy and effectiveness of the algorithm are verified.
- (3)
- The travel characteristics prediction and SOC reference trajectory planning algorithm are combined and applied to A-ECMS online. The adaptability of equivalent factors of A-ECMS is improved through mileage prediction, condition identification and vehicle speed prediction. The four energy management methods of A-ECMS based on travel characteristics prediction, A-ECMS without prediction, DP and CD-CS are compared and verified. The experiments show that travel characteristics prediction can achieve the goal of rational utilization of power battery power and reducing vehicle fuel consumption.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Meng, F.-S.; Jin, X.-Y. Evaluation of the development capability of the new energy vehicle industry: An empirical study from China. Sustainability 2019, 11, 2635. [Google Scholar] [CrossRef] [Green Version]
- Ma, J.; Liu, X.-D.; Chen, Y.-S.; Wang, G.-P. Current status and countermeasures for Chinas new energy automobile industry and technology development. China J. Highw. Transp. 2018, 31, 1–19. [Google Scholar]
- Hamut, H.S.; Dincer, I.; Naterer, G.F. Analysis and optimization of hybrid electric vehicle thermal management systems. J. Power Sources 2014, 247, 643–654. [Google Scholar] [CrossRef]
- Croce, A.I.; Musolino, G.; Rindone, C.; Vitetta, A. Estimation of travel demand models with limited information: Floating car data for parameters’ calibration. Sustainability 2021, 13, 8838. [Google Scholar] [CrossRef]
- Lee, C.H.; Wu, C.H. A novel big data modeling method for improving driving range estimation of EVs. IEEE Access 2015, 3, 1980–1993. [Google Scholar] [CrossRef]
- Mangiaracina, R.; Perego, A.; Salvadori, G.; Tumino, A. A comprehensive view of intelligent transport systems for urban smart mobility. Int. J. Logist. Res. Appl. 2017, 12, 664–672. [Google Scholar] [CrossRef]
- Zhu, L.; Yu, F.R.; Wang, Y.; Ning, B.; Tang, T. Big data analytics in intelligent transportation systems: A survey. IEEE Trans. Intell. Trans. Syst. 2019, 20, 383–398. [Google Scholar] [CrossRef]
- Liu, Y.-G.; Li, J.; Ye, M.; Qin, D.-T.; Zhang, Y.; Lei, Z.-Z. Optimal energy management strategy for a plug-in hybrid electric vehicle based on road grade information. Energies 2017, 10, 412. [Google Scholar] [CrossRef] [Green Version]
- Zhang, C.; Vahidi, A. Route preview in energy management of plug-in hybrid vehicles. IEEE Trans. Control Syst. Technol. 2012, 20, 546–553. [Google Scholar] [CrossRef]
- Wang, Q.-P.; You, S.-X.; Li, L.; Yang, C. Survey on energy management strategy for plug-in hybrid electric vehicles. J. Mech. Eng. 2017, 53, 1–19. [Google Scholar] [CrossRef]
- Wirasingha, S.G.; Emadi, A. Classification and review of control strategies for plug-in hybrid electric vehicles. IEEE Trans. Veh. Technol. 2011, 60, 111–122. [Google Scholar] [CrossRef]
- Padmarajan, B.V.; McGordon, A.; Jennings, P.A. Blended rule-based energy management for PHEV: System structure and strategy. IEEE Trans. Veh. Technol. 2016, 65, 8757–8762. [Google Scholar] [CrossRef]
- Zhou, W.; Zhang, C.-N.; Li, J.-Q. A study on comparison between BL and CD-CS optimal energy management strategies for extended range electric vehicles. Automot. Eng. 2016, 38, 1407–1414. [Google Scholar]
- Bayindir, K.C.; Gozukucuk, M.A.; Teke, A. A comprehensive overview of hybrid electric vehicle: Powertrain configurations, powertrain control techniques and electronic control units. Energy Convers. Manag. 2011, 52, 1305–1313. [Google Scholar] [CrossRef]
- Patil, R.M.; Filipi, Z.; Fathy, H.K. Comparison of supervisory control strategies for series plug-in hybrid electric vehicle powertrains through dynamic programming. IEEE Trans. Control Syst. Technol. 2014, 22, 502–509. [Google Scholar] [CrossRef]
- Chen, Z.; Mi, C.C.; Xu, J.; Gong, X.-Z.; You, C.-W. Energy management for a power-split plug-in hybrid electric vehicle based on dynamic programming and neural networks. IEEE Trans. Veh. Technol. 2014, 63, 1567–1580. [Google Scholar] [CrossRef]
- Montazeri-Gh, M.; Pourbafarani, Z. Near-optimal SOC trajectory for traffic-based adaptive PHEV control strategy. IEEE Trans. Control Syst. Technol. 2017, 66, 9753–9760. [Google Scholar] [CrossRef]
- Xu, L.-F.; Ouyang, M.-G.; Li, J.-Q.; Yang, F.-Y.; Lu, L.-G.; Hua, J.-F. Application of pontryagin’s minimal principle to the energy management strategy of plugin fuel cell electric vehicles. Int. J. Hydrogen Energy 2013, 38, 10104–10115. [Google Scholar] [CrossRef]
- Tribioli, L.; Barbieri, M.; Capata, R.; Sciubba, E.; Jannelli, E.; Bella, G. A real time energy management strategy for plug-in hybrid electric vehicles based on optimal control theory. Energy Procedia 2014, 45, 949–958. [Google Scholar] [CrossRef]
- Feng, T.-H.; Yang, L.; Gu, Q.; Hu, Y.-Q.; Yan, T.; Yan, B. A supervisory control strategy for plug-in hybrid electric vehicles based on energy demand prediction and route preview. IEEE Trans. Veh. Technol. 2015, 64, 1691–1700. [Google Scholar]
- Li, Y.-J.; Qi, W.; Wang, C.; Zhang, B.; Lu, Q. Study on extraction algorithm for time-varying equivalent factor of ECMS for parallel hybrid electric vehicle. Automot. Eng. 2021, 43, 181–188. [Google Scholar]
- Shen, P.-H.; Zhao, Z.-G.; Zhan, X.-W.; Li, J.-W.; Guo, Q.-Y. Optimal energy management strategy for a plug-in hybrid electric commercial vehicle based on velocity prediction. Energy 2018, 155, 838–852. [Google Scholar] [CrossRef]
- Loïc, J.; Rui, D.S.; Daniela, C.; Alan, K.; Luis, L.M. Smart energy management for series hybrid electric vehicles based on driver habits recognition and prediction. Energies 2020, 13, 2954. [Google Scholar]
- Zhang, S.; Xiong, R. Adaptive energy management of a plug-in hybrid electric vehicle based on driving pattern recognition and dynamic programming. Appl. Energy 2015, 155, 68–78. [Google Scholar] [CrossRef]
- Onori, S.; Tribioli, L. Adaptive pontryagin’s minimum principle supervisory controller design for the plug-in hybrid GM Chevrolet Volt. Appl. Energy 2015, 147, 224–234. [Google Scholar] [CrossRef]
- Liu, T.; Yu, H.-L.; Guo, H.-Y.; Qin, Y.-C.; Zou, Y. Online energy management for multimode plug-in hybrid electric vehicles. IEEE Trans. Ind. Inform. 2019, 15, 4352–4361. [Google Scholar] [CrossRef]
- Laporte, G. What you should know about the vehicle routing problem. Nav. Res. Log. 2007, 54, 811–819. [Google Scholar] [CrossRef]
- Croce, A.I.; Musolino, G.; Rindone, C.; Vitetta, A. Route and path choices of freight vehicles: A case study with floating car data. Sustainability 2020, 12, 8557. [Google Scholar] [CrossRef]
- Wang, P.Y.; Li, J.-K.; Yu, Y.-B.; Xiong, X.-Y.; Zhao, S.-J.; Shen, W.-S. Energy management of plug-in hybrid electric vehicle based on trip characteristic prediction. Proc. Inst. Mech. Eng. Part D 2020, 234, 2239–2259. [Google Scholar] [CrossRef]
- Li, B.R.; Pi, D.C.; Hou, M.R. EP-LSTM: Novel prediction algorithm for moving object destination. IET Intell. Trans. Syst. 2020, 15, 235–247. [Google Scholar] [CrossRef]
- Xue, A.Y.; Qi, J.Z.; Xie, X.; Zhang, R.; Huang, J.; Li, Y. Solving the data sparsity problem in destination prediction. VLDB J. 2015, 24, 219–243. [Google Scholar] [CrossRef]
- Ma, L.-L.; Fu, Z.-M.; Li, D.W. Energy management strategy of PHEV based on traffic prediction. Comput. Meas. Control 2017, 25, 207–211. [Google Scholar]
- Ahmad, M.; Mahyar, V.; Nasser, L.A. Real-time immune-inspired optimum state-of-charge trajectory estimation using upcoming route information preview and neural networks for plug-in hybrid electric vehicles fuel economy. Front. Mech. Eng. 2015, 10, 154–167. [Google Scholar]
- Zeng, Y.-P.; Cai, Y.; Kou, G.-Y.; Gao, W.; Qin, D.-T. Energy management for plug-in hybrid electric vehicle based on adaptive simplified-ECMS. Sustainability 2018, 10, 2060. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Jiao, X.-H. Real-time energy management for commute HEVs using modified A-ECMS with traffic information recognition. IET Intell. Trans. Syst. 2019, 13, 729–737. [Google Scholar] [CrossRef]
- Sun, C.; Sun, F.-C.; He, H.-W. Investigating adaptive-ECMS with velocity forecast ability for hybrid electric vehicles. Appl. Energy 2017, 185, 1644–1653. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Parameters | Value |
|---|---|---|
| Basic parameters of the vehicle | vehicle mass/kg | 1568 |
| frontal area/m2 | 2.13 | |
| air resistance coefficient | 0.29 | |
| rolling radius/m | 0.315 | |
| Engine | peak power/kW | 64 |
| maximum torque/N·m | 203 | |
| ISG | peak power/kW | 32 |
| maximum torque/N·m | 210 | |
| Power battery | capacity/A·h | 40 |
| rated voltage/V | 320 | |
| Speed ratio | transmission speed radio | 1.539 |
| final drive ratio | 3.944 |
| Driving Cycle of Type | 1 | 2 | 3 | 4 |
|---|---|---|---|---|
| Maximum SOC consumption per kilometer (%) | 1.010 | 1.218 | 1.322 | 1.364 |
| Driving Cycle of Type | 1 | 2 | 3 | 4 |
|---|---|---|---|---|
| Maximum SOC consumption per kilometer (%) | 1.010 | 0.871 | 1.175 | 1.299 |
| Symbol | Meaning |
|---|---|
| travel mileage | |
| pure electric mileage under current SOC state | |
| SOC consumption value of the whole cycle | |
| mileage of road section under 4 typical cycles | |
| SOC allocation of road sections under 4 typical cycles | |
| SOC allocation in EV mode under 4 typical cycles | |
| optimal SOC allocation under 4 typical cycles | |
| maximum SOC allocation under 4 typical cycles |
| Energy Management Methods | DP | A-ECMS with Prediction | A-ECMS without Prediction | CD-CS |
|---|---|---|---|---|
| SOC initial value | 0.9 | |||
| SOC final value | 0.3000 | 0.3018 | 0.3046 | 0.2942 |
| Fuel consumption (L/100 km) | 2.2468 | 2.3479 | 2.4026 | 2.5788 |
| Savings of fuel economy | 12.87% | 8.95% | 6.83% | / |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, Y.; Wang, P.; Sun, T. Research on Energy Management Method of Plug-In Hybrid Electric Vehicle Based on Travel Characteristic Prediction. Energies 2021, 14, 6134. https://doi.org/10.3390/en14196134
Ma Y, Wang P, Sun T. Research on Energy Management Method of Plug-In Hybrid Electric Vehicle Based on Travel Characteristic Prediction. Energies. 2021; 14(19):6134. https://doi.org/10.3390/en14196134
Chicago/Turabian StyleMa, Yangyang, Pengyu Wang, and Tianjun Sun. 2021. "Research on Energy Management Method of Plug-In Hybrid Electric Vehicle Based on Travel Characteristic Prediction" Energies 14, no. 19: 6134. https://doi.org/10.3390/en14196134
APA StyleMa, Y., Wang, P., & Sun, T. (2021). Research on Energy Management Method of Plug-In Hybrid Electric Vehicle Based on Travel Characteristic Prediction. Energies, 14(19), 6134. https://doi.org/10.3390/en14196134