
Maximum Power Extraction from Wind Turbines Using a Fault-Tolerant Fractional-Order Nonsingular Terminal Sliding Mode Controller



Abstract
:1. Introduction
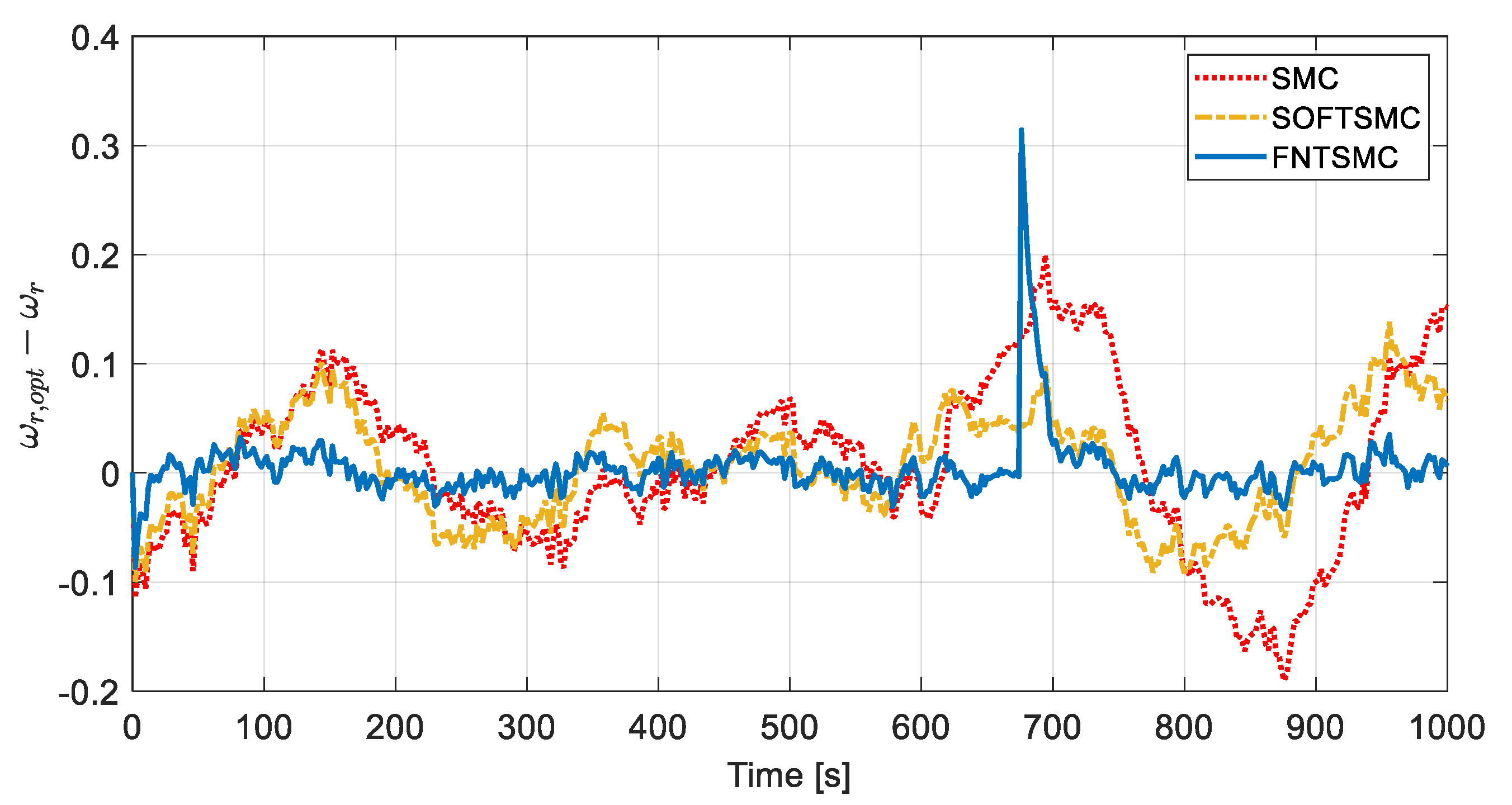
- A design that integrates the fractional calculus into NTSMC to effectively enhance the finite-time convergence speed and simultaneously alleviate the chattering phenomenon. Therefore, the optimum rotor speed tracking is achieved with little error, resulting in more power extracted from the wind;
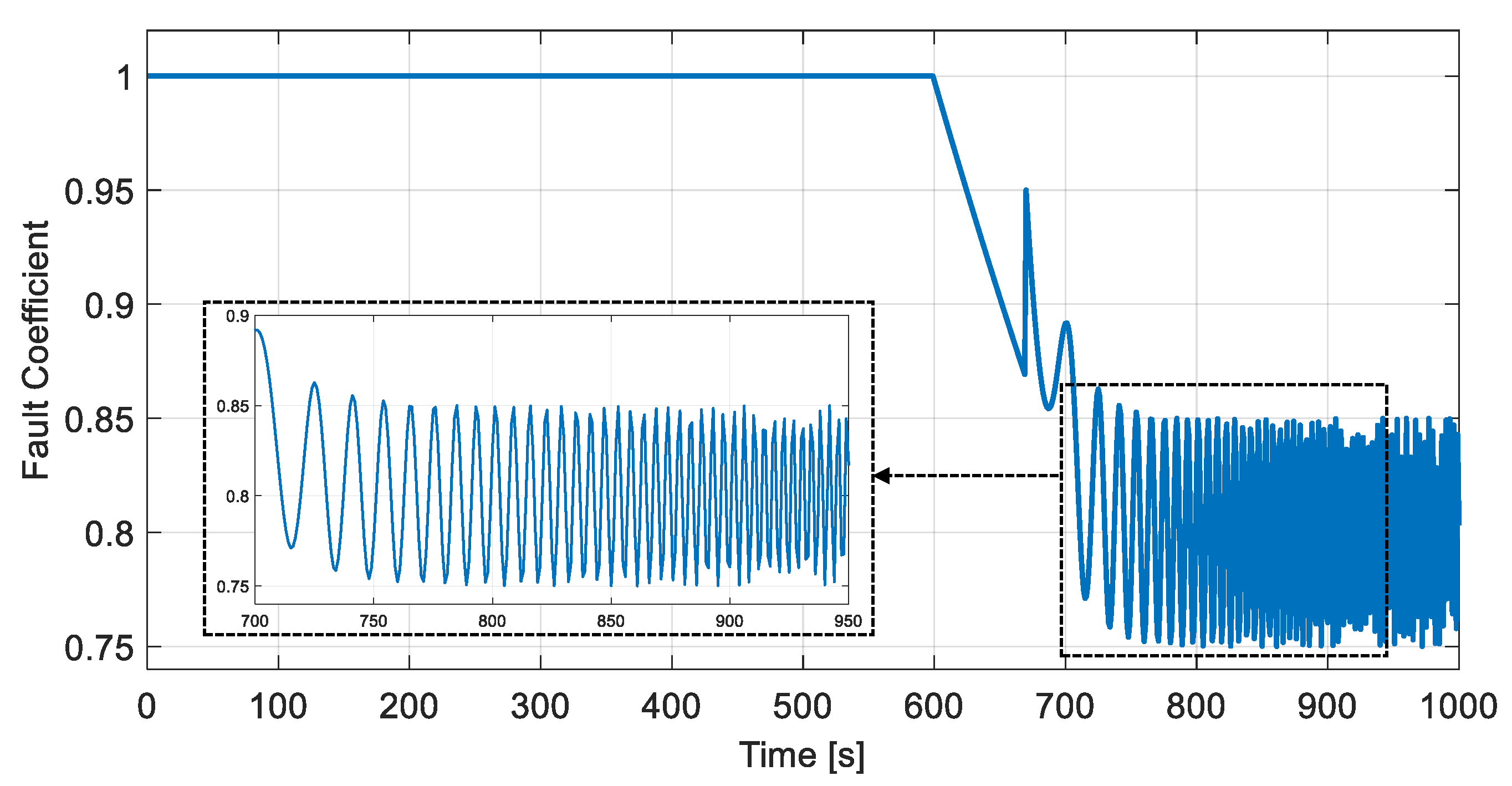
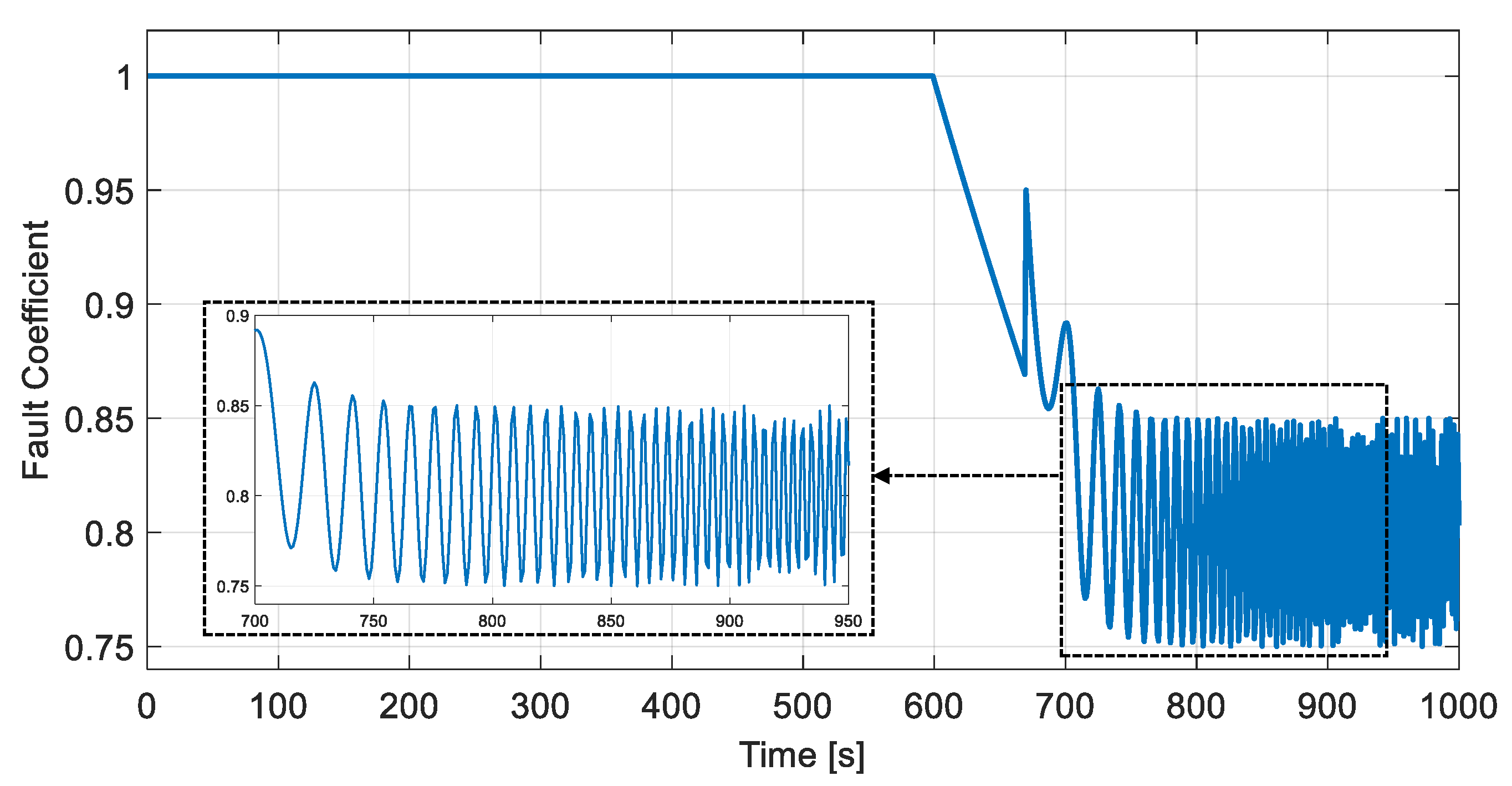
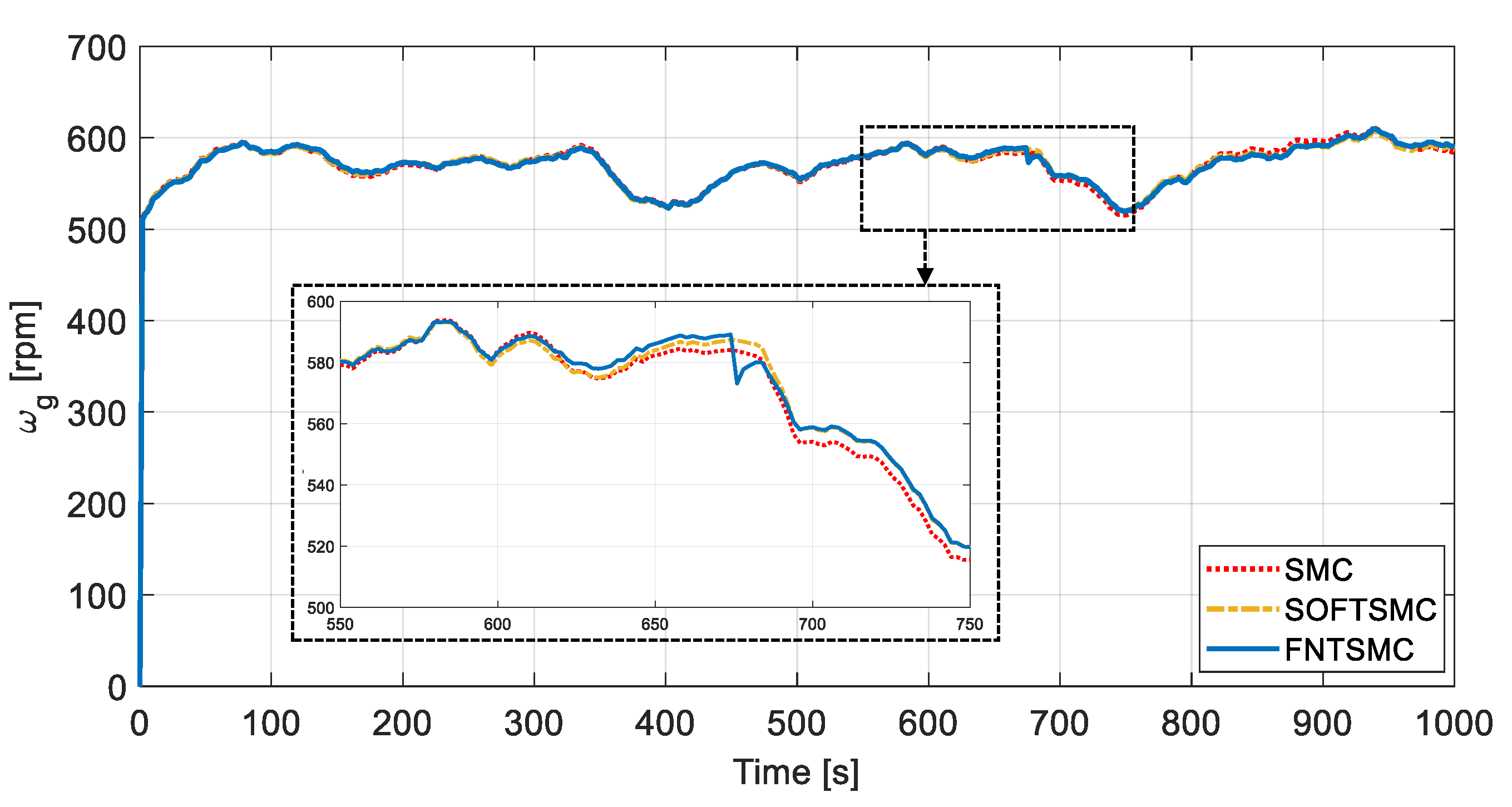
- Validation and performance assessment of the fault-tolerant capability of proposed design using partial loss on the generator torque;
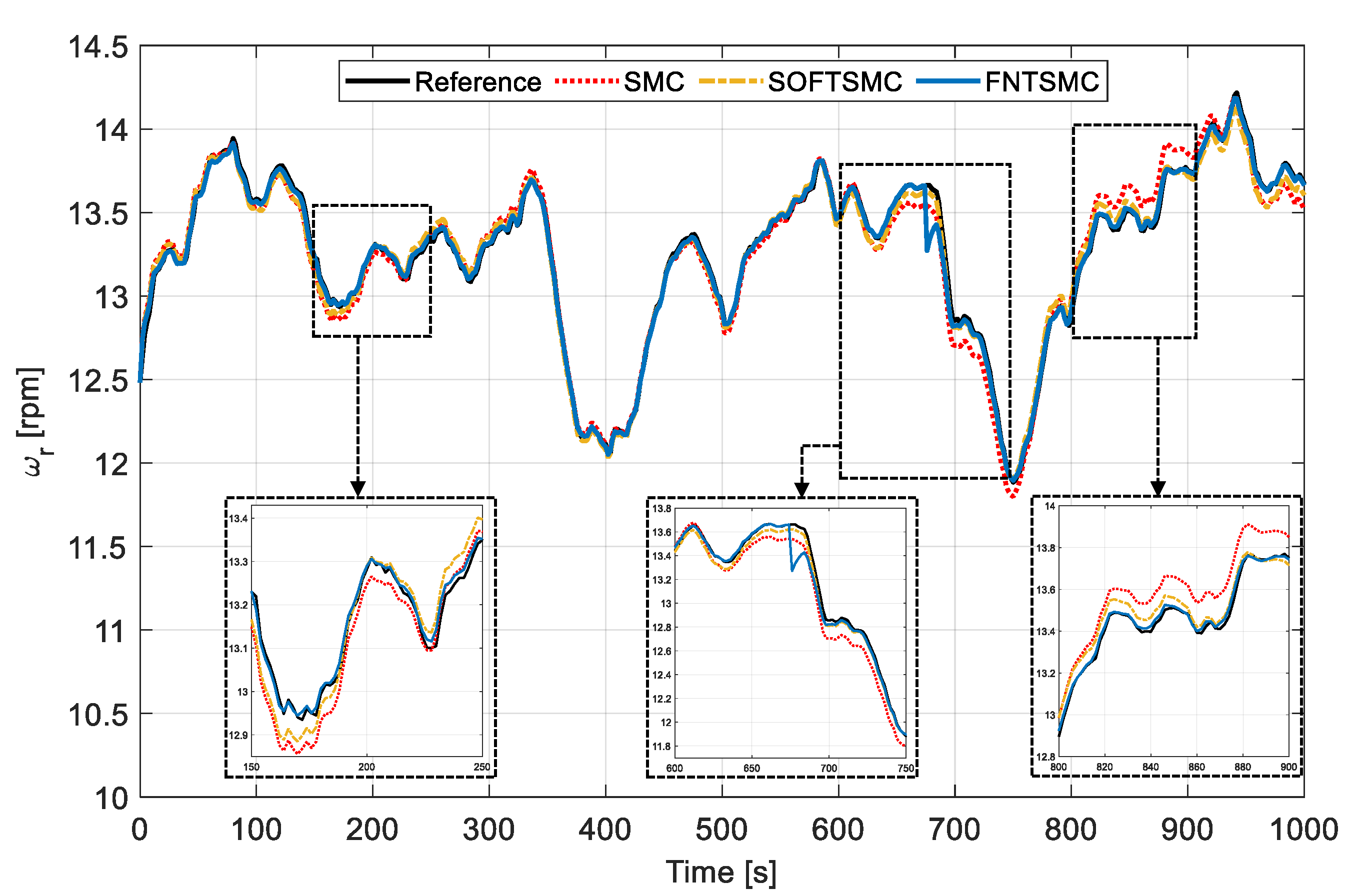
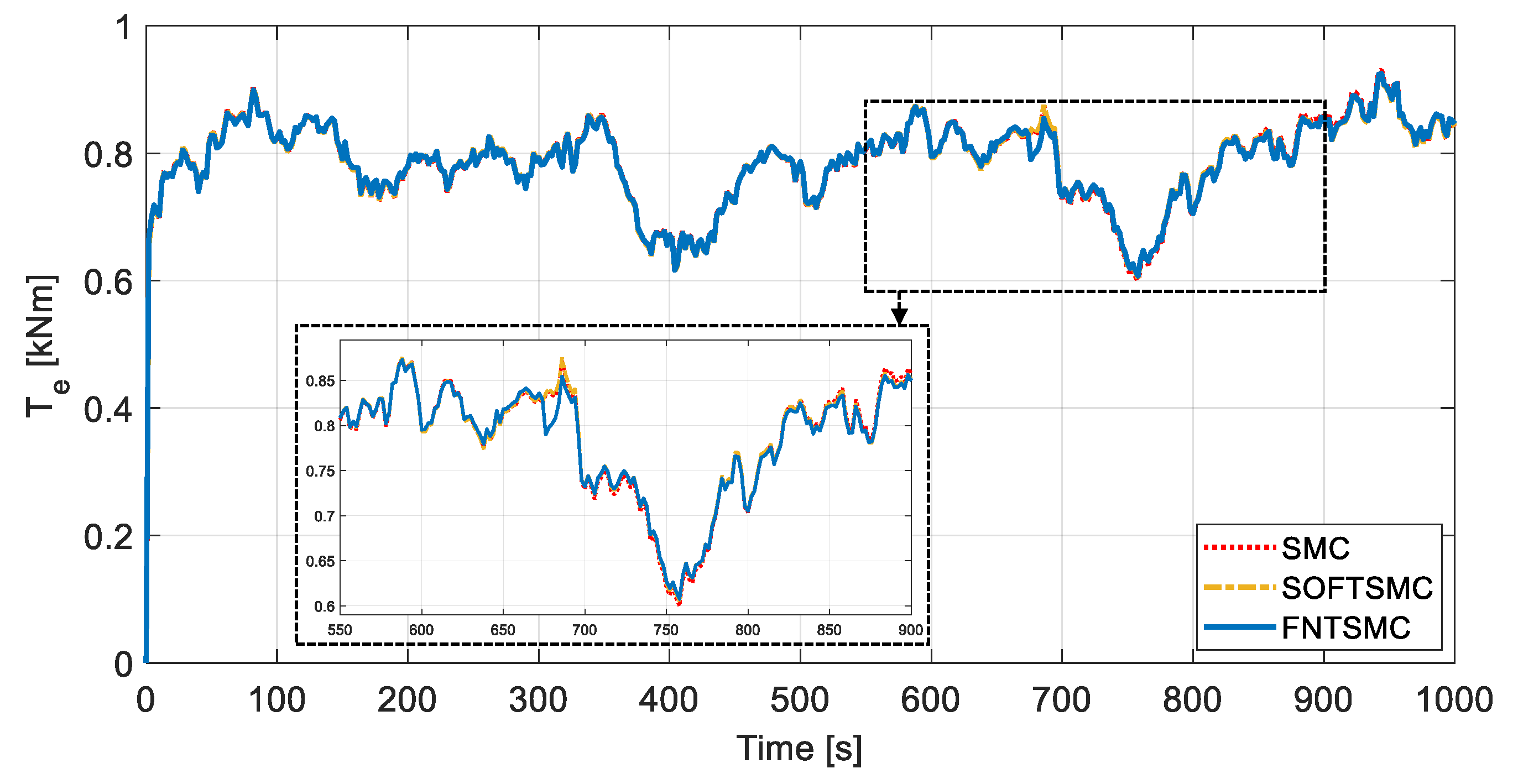
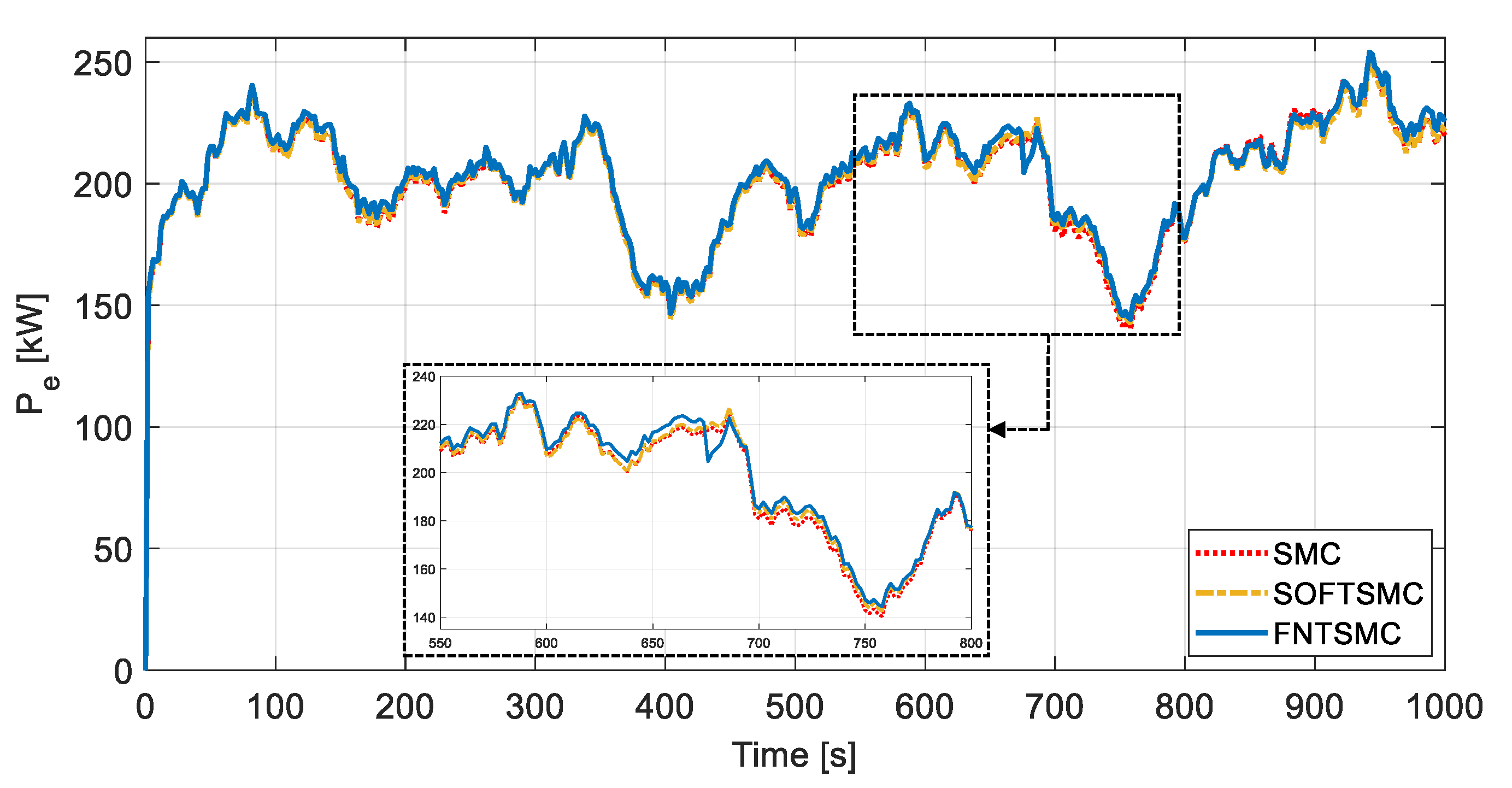
- Comparative performance analysis of the developed control strategy with conventional SMC [38] and second-order fast terminal SMC [39]. Accordingly, taking advantage of the proposed control law, a desirable optimum rotor speed tracking performance with fewer fluctuations and faster transient response is achieved.
2. Problem Formulation
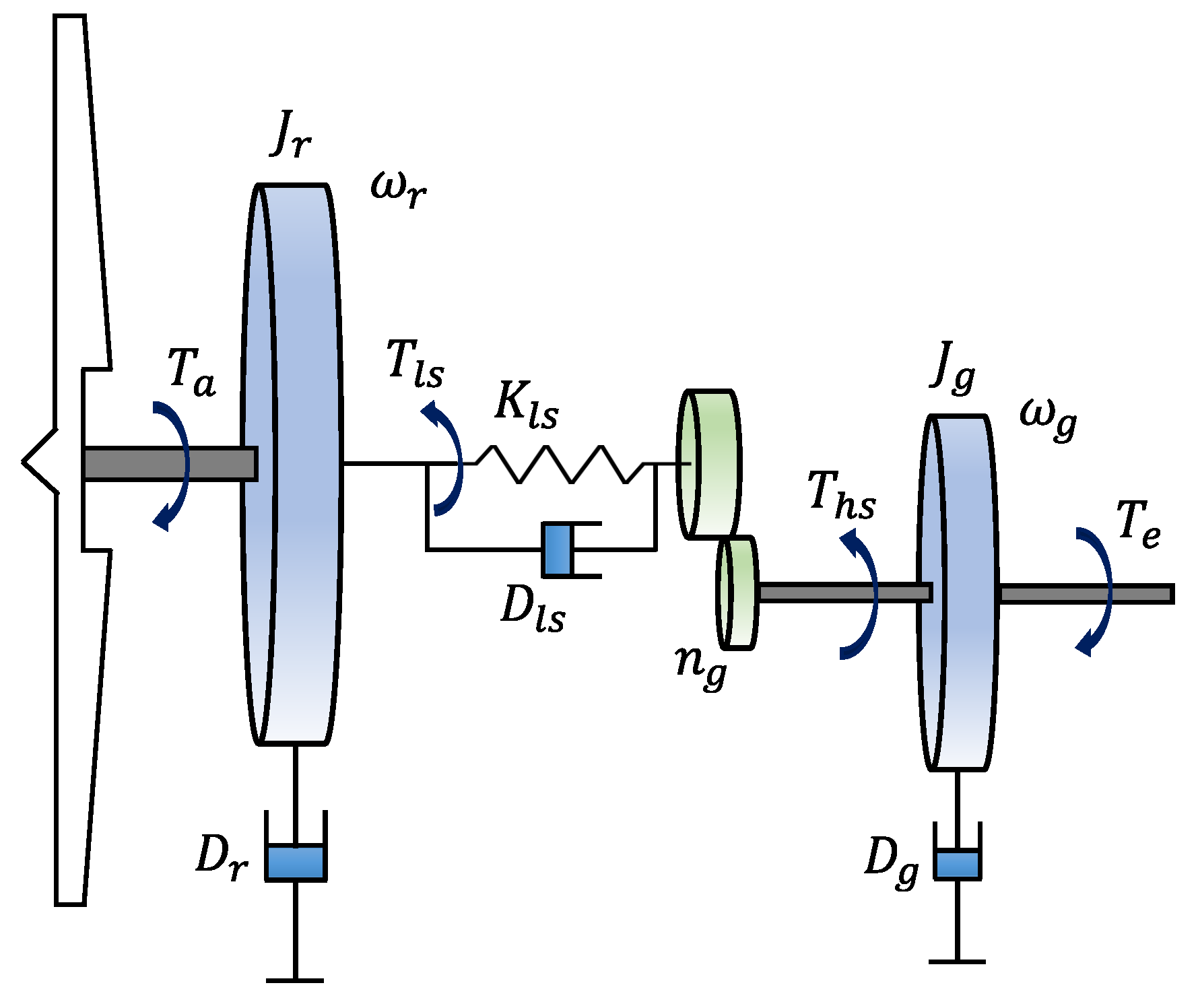
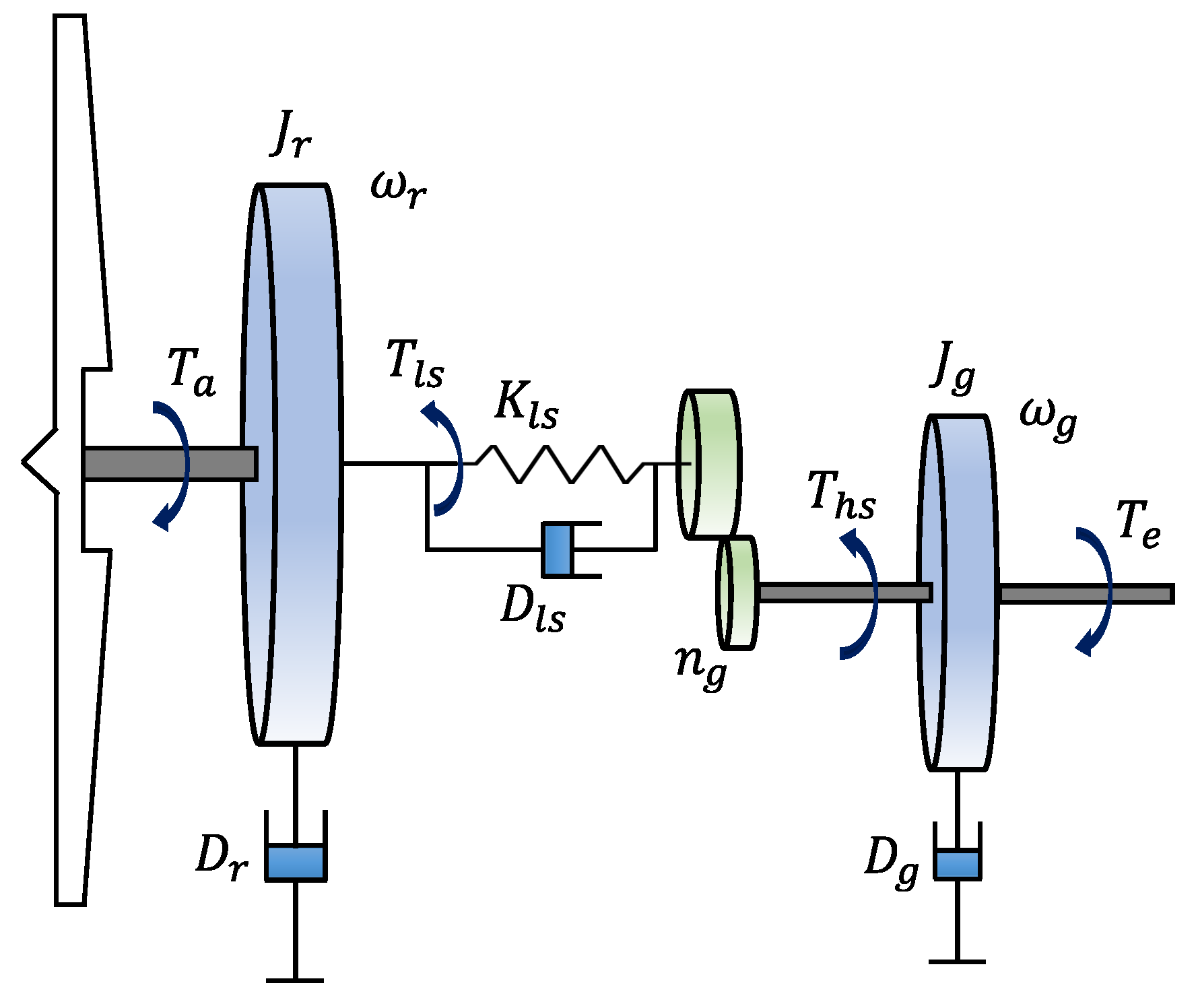
2.1. Wind Turbine Model
2.2. Problem Statement
2.3. Actuator Faults
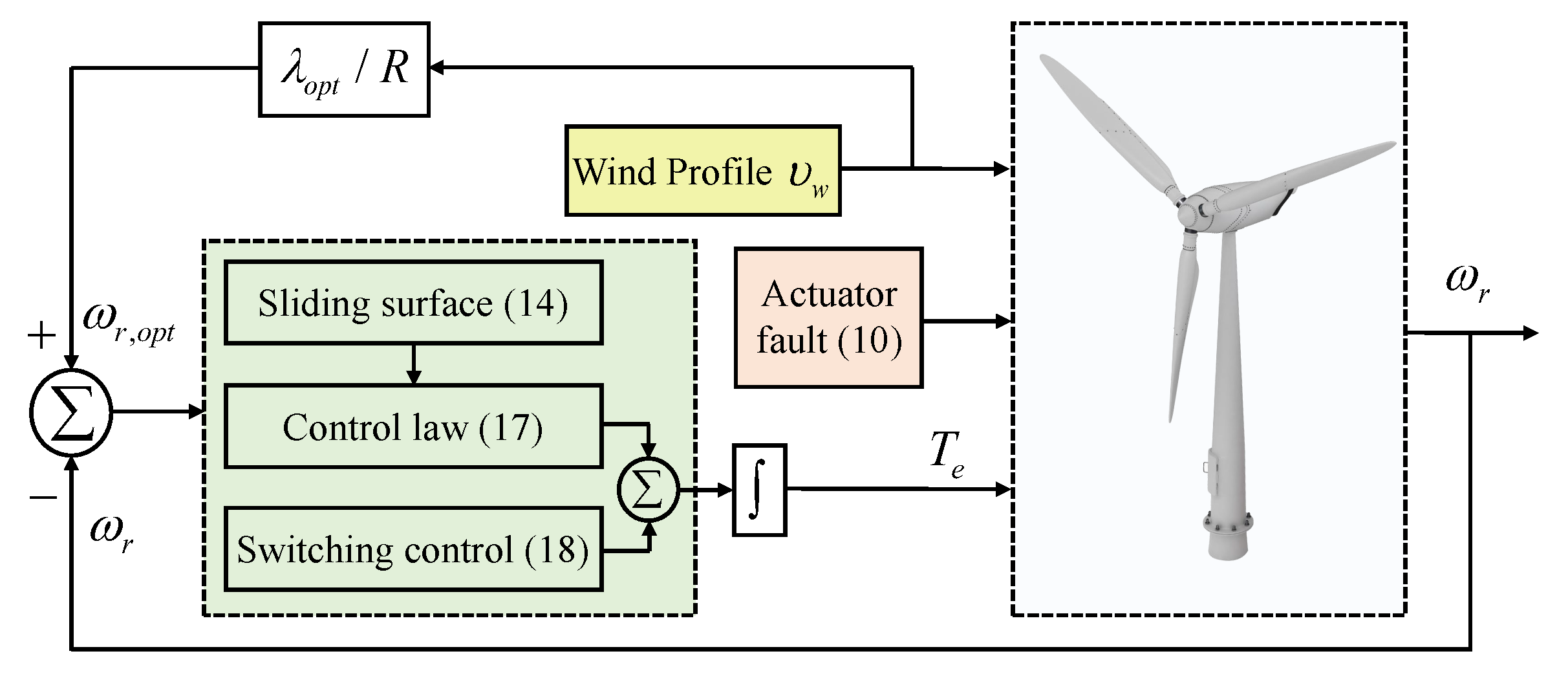
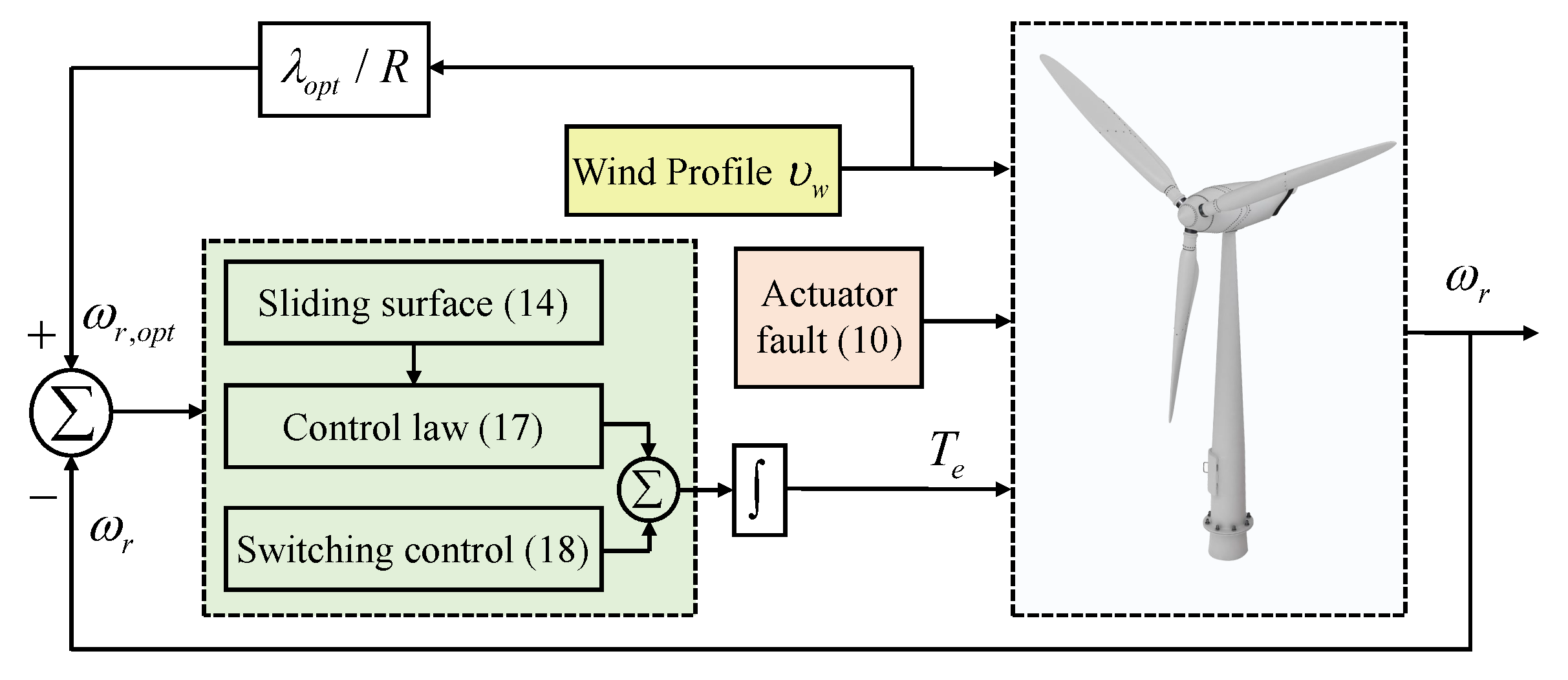
3. Controller Design
3.1. Preliminaries on Fractional Calculus
3.2. Proposed FNTSMC Controller
4. Simulation Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| CART | Controls Advanced Research Turbine |
| DFIG | Doubly-Fed Induction Generator |
| FNTS | Fractional Nonsingular Terminal Sliding |
| FNTSMC | Fractional Nonsingular Terminal Sliding Mode Control |
| FTC | Fault Tolerant Control |
| MPC | Model Predictive Control |
| NN | Neural Network |
| NTSMC | Nonsingular Terminal Sliding Mode Control |
| PI | Proportional Integral |
| PID | Proportional Integral Derivative |
| PMSG | Permanent-Magnet Synchronous Generator |
| PSO | Particle Swarm Optimization |
| RL | Riemann–Liouville |
| SMC | Sliding Mode Control |
| SOFTSMC | Second-order Fast Terminal Sliding Mode Control |
| TSMC | Terminal Sliding Mode Control |
| WECS | Wind Energy Conversion System |
| WT | Wind Turbine |
References
- Fu, B.; Zhao, J.; Li, B.; Yao, J.; Teifouet, A.R.M.; Sun, L.; Wang, Z. Fatigue reliability analysis of wind turbine tower under random wind load. Struct. Saf. 2020, 87, 101982. [Google Scholar] [CrossRef]
- Yang, Z.; Chai, Y. A survey of fault diagnosis for onshore grid-connected converter in wind energy conversion systems. Renew. Sustain. Energy Rev. 2016, 66, 345–359. [Google Scholar] [CrossRef]
- Habibi, H.; Howard, I.; Simani, S.; Fekih, A. Decoupling adaptive sliding mode observer design for wind turbines subject to simultaneous faults in sensors and actuators. IEEE/CAA J. Autom. Sin. 2021, 8, 837–847. [Google Scholar] [CrossRef]
- Fekih, A.; Mobayen, S.; Chen, C.C. Adaptive Robust Fault-Tolerant Control Design for Wind Turbines Subject to Pitch Actuator Faults. Energies 2021, 14, 1791. [Google Scholar] [CrossRef]
- Ragheb, M.; Ragheb, A.M. Wind turbines theory-the betz equation and optimal rotor tip speed ratio. Fundam. Adv. Top. Wind Power 2011, 1, 19–38. [Google Scholar]
- Ganjefar, S.; Ghassemi, A.A.; Ahmadi, M.M. Improving efficiency of two-type maximum power point tracking methods of tip-speed ratio and optimum torque in wind turbine system using a quantum neural network. Energy 2014, 67, 444–453. [Google Scholar] [CrossRef]
- Wang, L.; Cao, L.; Zhao, L. Non-linear tip speed ratio cascade control for variable speed high power wind turbines: A backstepping approach. IET Renew. Power Gener. 2018, 12, 968–972. [Google Scholar] [CrossRef]
- Mokhtari, Y.; Rekioua, D. High performance of maximum power point tracking using ant colony algorithm in wind turbine. Renew. Energy 2018, 126, 1055–1063. [Google Scholar] [CrossRef]
- Song, D.; Liu, J.; Yang, Y.; Yang, J.; Su, M.; Wang, Y.; Gui, N.; Yang, X.; Huang, L.; Joo, Y.H. Maximum wind energy extraction of large-scale wind turbines using nonlinear model predictive control via Yin-Yang grey wolf optimization algorithm. Energy 2021, 221, 119866. [Google Scholar] [CrossRef]
- Haq, I.U.; Khan, Q.; Khan, I.; Akmeliawati, R.; Nisar, K.S.; Khan, I. Maximum power extraction strategy for variable speed wind turbine system via neuro-adaptive generalized global sliding mode controller. IEEE Access 2020, 8, 128536–128547. [Google Scholar]
- Abolvafaei, M.; Ganjefar, S. Two novel approaches to capture the maximum power from variable speed wind turbines using optimal fractional high-order fast terminal sliding mode control. Eur. J. Control 2021, 60, 78–94. [Google Scholar] [CrossRef]
- Li, S.; Wang, H.; Aitouche, A.; Christov, N. Active fault tolerant control of wind turbine systems based on DFIG with actuator fault and disturbance using Takagi–Sugeno fuzzy model. J. Frankl. Inst. 2018, 355, 8194–8212. [Google Scholar] [CrossRef]
- Habibi, H.; Nohooji, H.R.; Howard, I. Adaptive PID control of wind turbines for power regulation with unknown control direction and actuator faults. IEEE Access 2018, 6, 37464–37479. [Google Scholar] [CrossRef]
- Schulte, H.; Gauterin, E. Fault-tolerant control of wind turbines with hydrostatic transmission using Takagi–Sugeno and sliding mode techniques. Annu. Rev. Control 2015, 40, 82–92. [Google Scholar] [CrossRef]
- Azizi, A.; Nourisola, H.; Shoja-Majidabad, S. Fault tolerant control of wind turbines with an adaptive output feedback sliding mode controller. Renew. Energy 2019, 135, 55–65. [Google Scholar] [CrossRef]
- Mofid, O.; Mobayen, S.; Fekih, A. Adaptive Integral-Type Terminal Sliding Mode Control for Unmanned Aerial Vehicle Under Model Uncertainties and External Disturbances. IEEE Access 2021, 9, 53255–53265. [Google Scholar] [CrossRef]
- Benbouhenni, H.; Bizon, N. A Synergetic Sliding Mode Controller Applied to Direct Field-Oriented Control of Induction Generator-Based Variable Speed Dual-Rotor Wind Turbines. Energies 2021, 14, 4437. [Google Scholar] [CrossRef]
- Riaz, U.; Tayyeb, M.; Amin, A.A. A review of sliding mode control with the perspective of utilization in fault tolerant control. Recent Adv. Electr. Electron. Eng. Former. Recent Patents Electr. Electron. Eng. 2021, 14, 312–324. [Google Scholar]
- Mobayen, S.; Bayat, F.; Lai, C.C.; Taheri, A.; Fekih, A. Adaptive global sliding mode controller design for perturbed DC-DC buck converters. Energies 2021, 14, 1249. [Google Scholar] [CrossRef]
- Eddine, K.D.; Mezouar, A.; Boumediene, L.; Van Den Bossche, A.P. A comprehensive review of LVRT capability and sliding mode control of grid-connected wind-turbine-driven doubly fed induction generator. Automatika 2016, 57, 922–935. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, Z.; Xiong, L.; Wang, J.; Jiang, X.; Bai, G.; Li, R.; Liu, S. DFIG wind turbine sliding mode control with exponential reaching law under variable wind speed. Int. J. Electr. Power Energy Syst. 2018, 96, 253–260. [Google Scholar] [CrossRef]
- Nayeh, R.F.; Moradi, H.; Vossoughi, G. Multivariable robust control of a horizontal wind turbine under various operating modes and uncertainties: A comparison on sliding mode and H∞ control. Int. J. Electr. Power Energy Syst. 2020, 115, 105474. [Google Scholar] [CrossRef]
- Kelkoul, B.; Boumediene, A. Stability analysis and study between Classical Sliding Mode Control (SMC) and Super Twisting Algorithm (STA) for Doubly Fed Induction Generator (DFIG) under Wind turbine. Energy 2020, 214, 118871. [Google Scholar] [CrossRef]
- Jing, C.; Xu, H.; Niu, X. Adaptive sliding mode disturbance rejection control with prescribed performance for robotic manipulators. ISA Trans. 2019, 91, 41–51. [Google Scholar] [CrossRef]
- Laghrouche, S.; Harmouche, M.; Chitour, Y.; Obeid, H.; Fridman, L.M. Barrier function-based adaptive higher order sliding mode controllers. Automatica 2021, 123, 109355. [Google Scholar] [CrossRef]
- Mousavi, Y.; Zarei, A.; Mousavi, A.; Biari, M. Robust Optimal Higher-order-observer-based Dynamic Sliding Mode Control for VTOL Unmanned Aerial Vehicles. Int. J. Autom. Comput. 2021, 18, 802–813. [Google Scholar] [CrossRef]
- Zheng, X.; Feng, Y.; Han, F.; Yu, X. Integral-type terminal sliding-mode control for grid-side converter in wind energy conversion systems. IEEE Trans. Ind. Electron. 2018, 66, 3702–3711. [Google Scholar] [CrossRef]
- Xu, N.; Chen, Y.; Xue, A.; Zong, G.; Zhao, X. Event-trigger-based adaptive fuzzy hierarchical sliding mode control of uncertain under-actuated switched nonlinear systems. ISA Trans. 2019, in press. [Google Scholar] [CrossRef]
- Hashtarkhani, B.; Khosrowjerdi, M.J. Neural adaptive fault tolerant control of nonlinear fractional order systems via terminal sliding mode approach. J. Comput. Nonlinear Dyn. 2019, 14, 031009. [Google Scholar] [CrossRef]
- Mousavi, Y.; Zarei, A.; Jahromi, Z.S. Robust adaptive fractional-order nonsingular terminal sliding mode stabilization of three-axis gimbal platforms. ISA Trans. 2021, in press. [Google Scholar] [CrossRef]
- Xie, Y.; Zhang, X.; Meng, W.; Zheng, S.; Jiang, L.; Meng, J.; Wang, S. Coupled fractional-order sliding mode control and obstacle avoidance of a four-wheeled steerable mobile robot. ISA Trans. 2021, 108, 282–294. [Google Scholar] [CrossRef]
- Ali, N.; Liu, Z.; Hou, Y.; Armghan, H.; Wei, X.; Armghan, A. LCC-S based discrete fast terminal sliding mode controller for efficient charging through wireless power transfer. Energies 2020, 13, 1370. [Google Scholar] [CrossRef] [Green Version]
- Mousavi, Y.; Alfi, A. Fractional calculus-based firefly algorithm applied to parameter estimation of chaotic systems. Chaos, Solitons Fractals 2018, 114, 202–215. [Google Scholar] [CrossRef]
- Fahad, S.; Ullah, N.; Mahdi, A.J.; Ibeas, A.; Goudarzi, A. An advanced two-stage grid connected pv system: A fractional-order controller. arXiv 2020, arXiv:2004.14106. [Google Scholar]
- Mousavi, Y.; Alfi, A. A memetic algorithm applied to trajectory control by tuning of fractional order proportional-integral-derivative controllers. Appl. Soft Comput. 2015, 36, 599–617. [Google Scholar] [CrossRef]
- Nicola, M.; Nicola, C.I. Fractional-Order Control of Grid-Connected Photovoltaic System Based on Synergetic and Sliding Mode Controllers. Energies 2021, 14, 510. [Google Scholar] [CrossRef]
- Sami, I.; Ullah, S.; Ali, Z.; Ullah, N.; Ro, J.S. A super twisting fractional order terminal sliding mode control for DFIG-based wind energy conversion system. Energies 2020, 13, 2158. [Google Scholar] [CrossRef]
- Mérida, J.; Aguilar, L.T.; Dávila, J. Analysis and synthesis of sliding mode control for large scale variable speed wind turbine for power optimization. Renew. Energy 2014, 71, 715–728. [Google Scholar] [CrossRef]
- Abolvafaei, M.; Ganjefar, S. Maximum power extraction from a wind turbine using second-order fast terminal sliding mode control. Renew. Energy 2019, 139, 1437–1446. [Google Scholar] [CrossRef]
- Johnson, K.E.; Pao, L.Y.; Balas, M.J.; Fingersh, L.J. Control of variable-speed wind turbines: Standard and adaptive techniques for maximizing energy capture. IEEE Control Syst. Mag. 2006, 26, 70–81. [Google Scholar]
- Beltran, B.; Ahmed-Ali, T.; Benbouzid, M.E.H. Sliding mode power control of variable-speed wind energy conversion systems. IEEE Trans. Energy Convers. 2008, 23, 551–558. [Google Scholar] [CrossRef] [Green Version]
- Badihi, H.; Zhang, Y.; Pillay, P.; Rakheja, S. Fault-Tolerant Individual Pitch Control for Load Mitigation in Wind Turbines with Actuator Faults. IEEE Trans. Ind. Electron. 2020, 68, 532–543. [Google Scholar] [CrossRef]
- Badihi, H.; Zhang, Y.; Hong, H. Wind turbine fault diagnosis and fault-tolerant torque load control against actuator faults. IEEE Trans. Control Syst. Technol. 2014, 23, 1351–1372. [Google Scholar] [CrossRef]
- Asgharnia, A.; Jamali, A.; Shahnazi, R.; Maheri, A. Load mitigation of a class of 5-MW wind turbine with RBF neural network based fractional-order PID controller. ISA Trans. 2020, 96, 272–286. [Google Scholar] [CrossRef]
- Li, D.Y.; Li, P.; Cai, W.C.; Song, Y.D.; Chen, H.J. Adaptive fault-tolerant control of wind turbines with guaranteed transient performance considering active power control of wind farms. IEEE Trans. Ind. Electron. 2017, 65, 3275–3285. [Google Scholar] [CrossRef]
- Machado, J.T.; Kiryakova, V.; Mainardi, F. Recent history of fractional calculus. Commun. Nonlinear Sci. Numer. Simul. 2011, 16, 1140–1153. [Google Scholar] [CrossRef] [Green Version]
- Stol, K.A. Geometry and Structural Properties for the Controls Advanced Research Turbine (CART) from Model Tuning: August 25, 2003–November 30, 2003; Technical Report; National Renewable Energy Lab.: Golden, CO, USA, 2004. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit | Parameter | Value | Unit |
|---|---|---|---|---|---|
| R | 21.65 | 1.308 | |||
| 3.25 | 34.4 | ||||
| 27.36 | 0.2 | ||||
| 2.691 | 9500 | ||||
| 43.165 | − | 600 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mousavi, Y.; Bevan, G.; Küçükdemiral, I.B.; Fekih, A. Maximum Power Extraction from Wind Turbines Using a Fault-Tolerant Fractional-Order Nonsingular Terminal Sliding Mode Controller. Energies 2021, 14, 5887. https://doi.org/10.3390/en14185887
Mousavi Y, Bevan G, Küçükdemiral IB, Fekih A. Maximum Power Extraction from Wind Turbines Using a Fault-Tolerant Fractional-Order Nonsingular Terminal Sliding Mode Controller. Energies. 2021; 14(18):5887. https://doi.org/10.3390/en14185887
Chicago/Turabian StyleMousavi, Yashar, Geraint Bevan, Ibrahim Beklan Küçükdemiral, and Afef Fekih. 2021. "Maximum Power Extraction from Wind Turbines Using a Fault-Tolerant Fractional-Order Nonsingular Terminal Sliding Mode Controller" Energies 14, no. 18: 5887. https://doi.org/10.3390/en14185887
APA StyleMousavi, Y., Bevan, G., Küçükdemiral, I. B., & Fekih, A. (2021). Maximum Power Extraction from Wind Turbines Using a Fault-Tolerant Fractional-Order Nonsingular Terminal Sliding Mode Controller. Energies, 14(18), 5887. https://doi.org/10.3390/en14185887