
Observer Design for a Variable Moment of Inertia System


Abstract
1. Introduction
- A systematic model design of the “ball-and-beam” system;
- The design of a nonlinear observer with a specific structure and stability proven in a novel way;
- A systematic analysis and comparison with a typical linear observer.
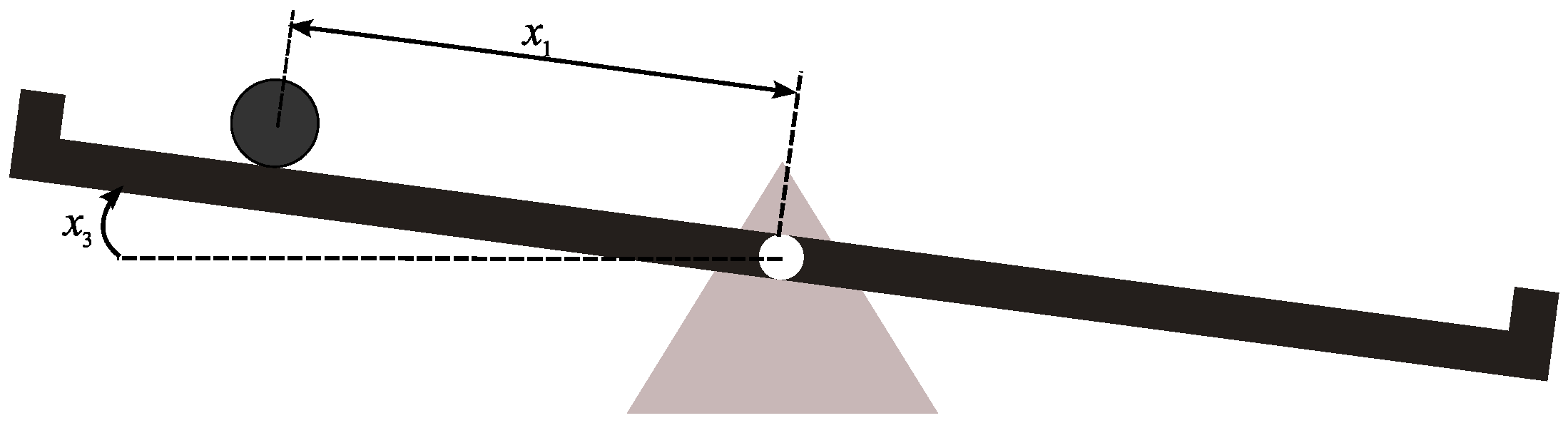
2. Ball-on-Beam Variable Moment of Inertia System
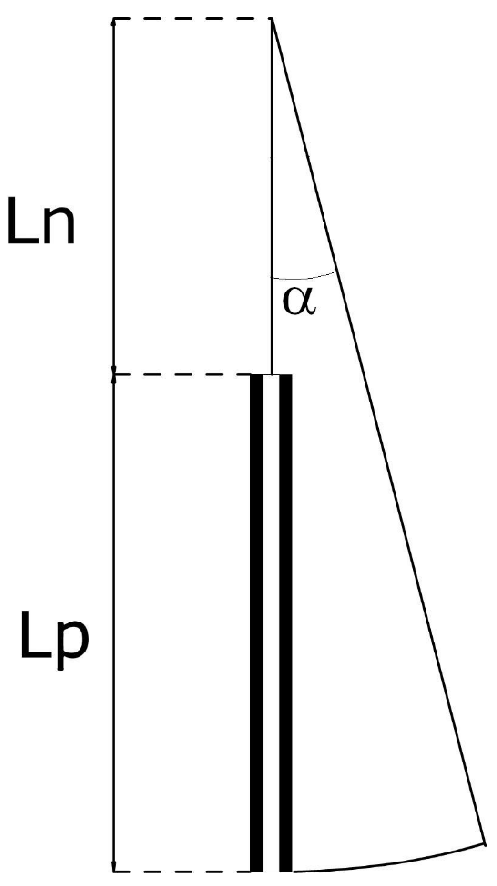
2.1. Determination of the Physical Model
- —beam moment of inertia (kg·m );
- m—ball weight (kg);
- r—ball radius (m);
- —beam length (m).
- (1)
- The ball does not slide on the beam (it only rolls);
- (2)
- The angle of the beam ;
- (3)
- The friction is negligible;
- (4)
- The ball is perfectly round and homogenous;
- (5)
- The ball does not rebound from limiters;
- (6)
- The ball does not lose contact with the beam;
- (7)
- The beam is perfectly symmetric and flat.
2.2. Model Parameters
3. Methods
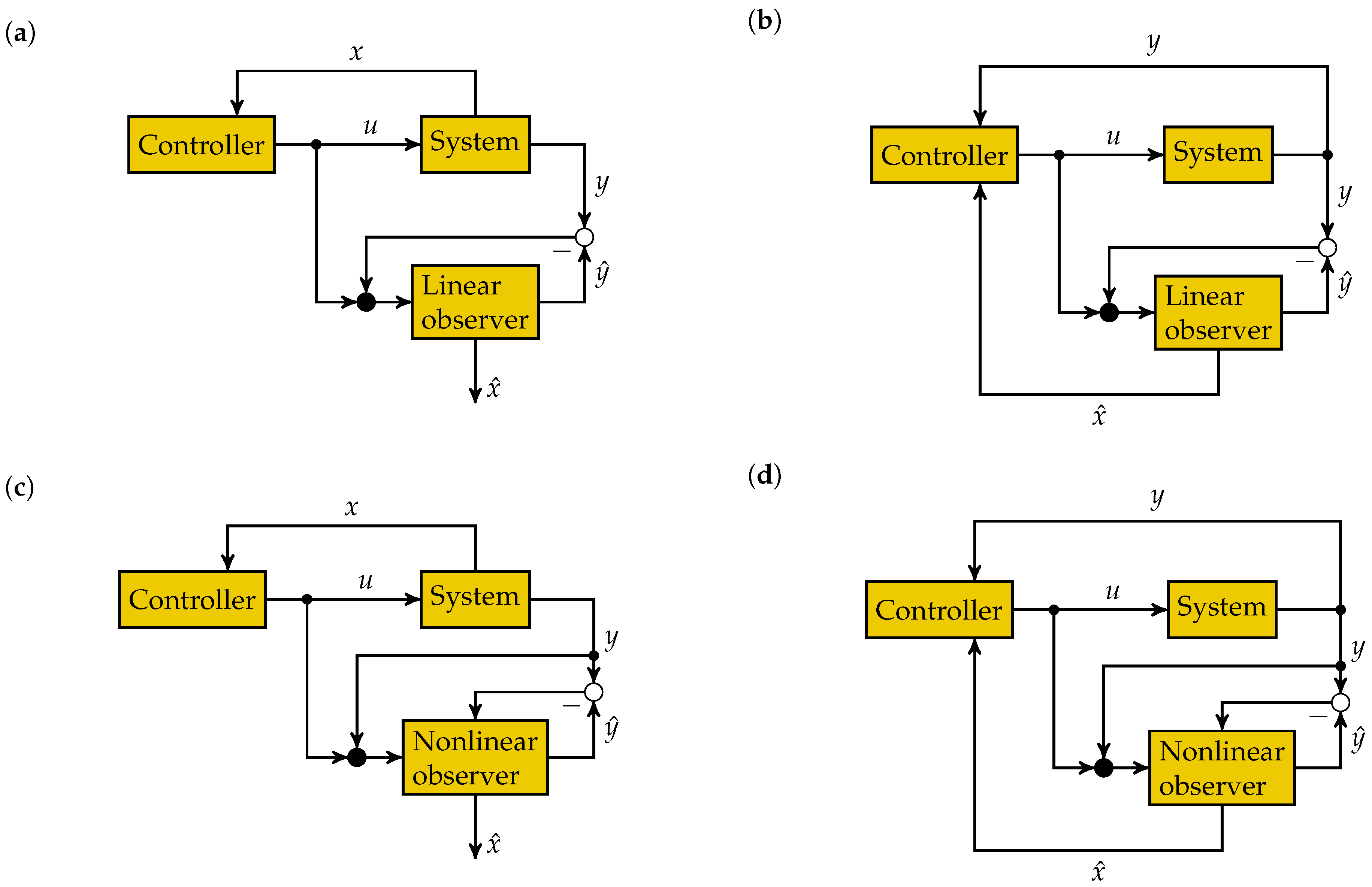
3.1. Linear Observer Design
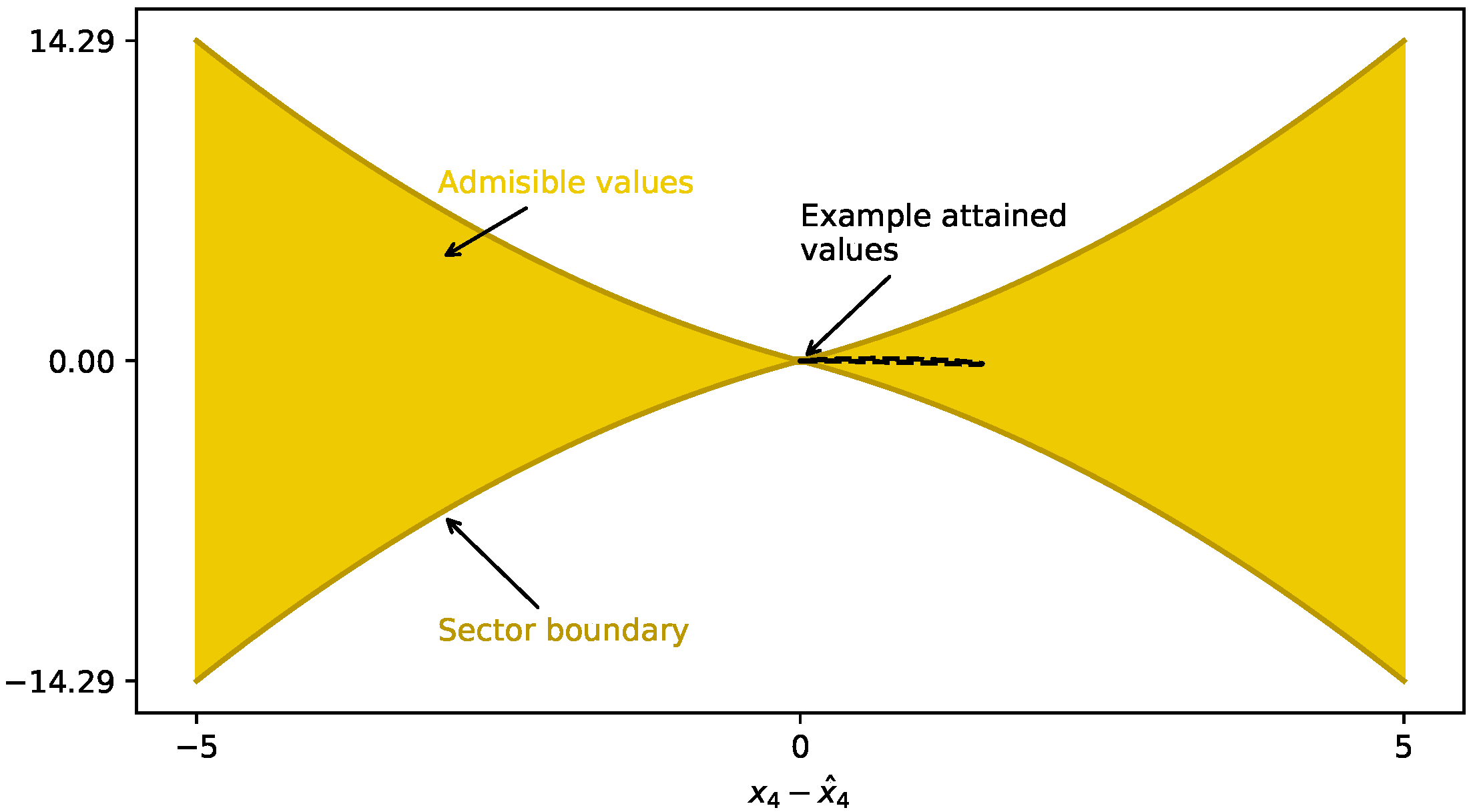
3.2. Nonlinear Observer Design
3.3. Considered Control System
4. Simulation Experiments
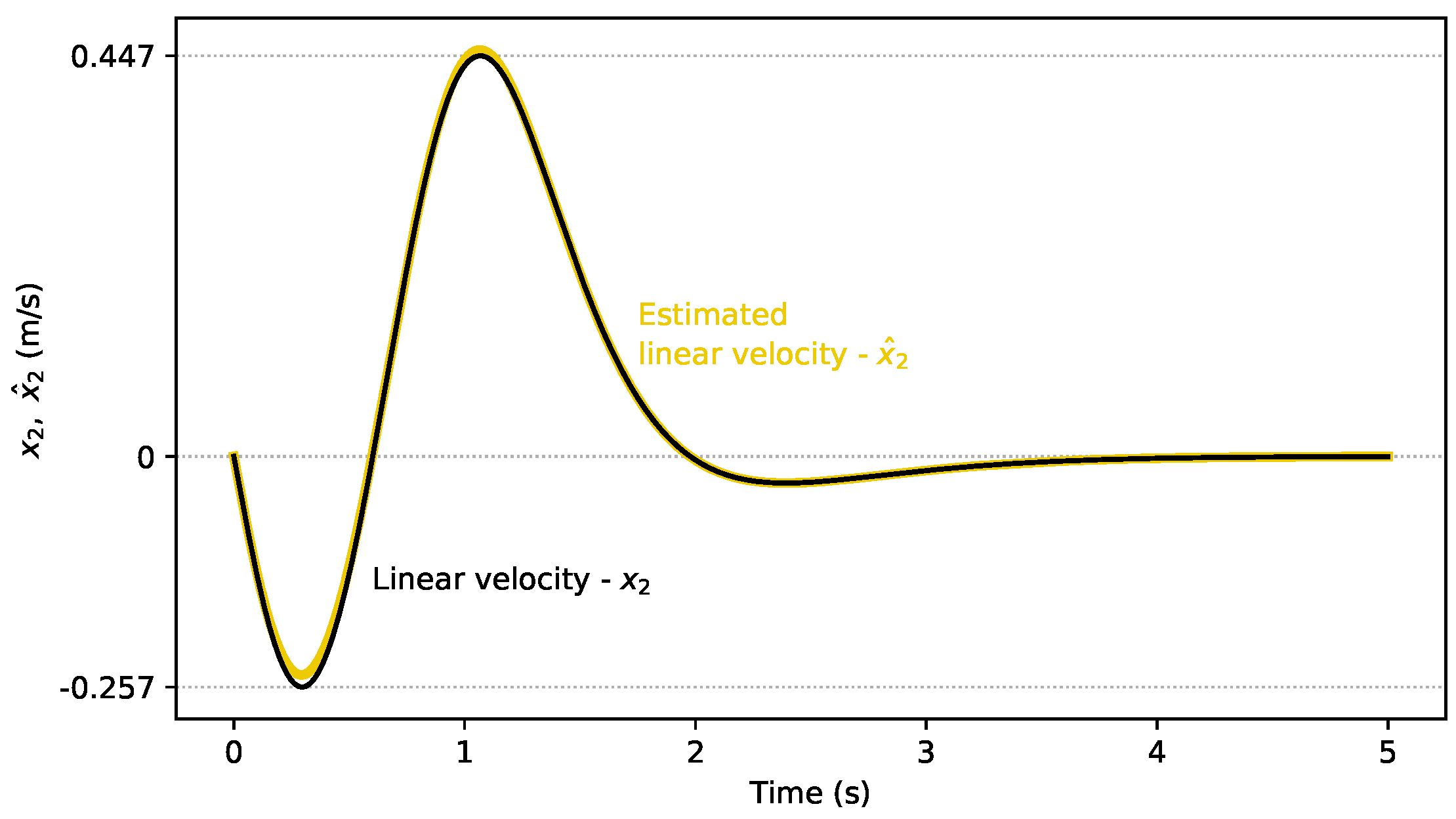
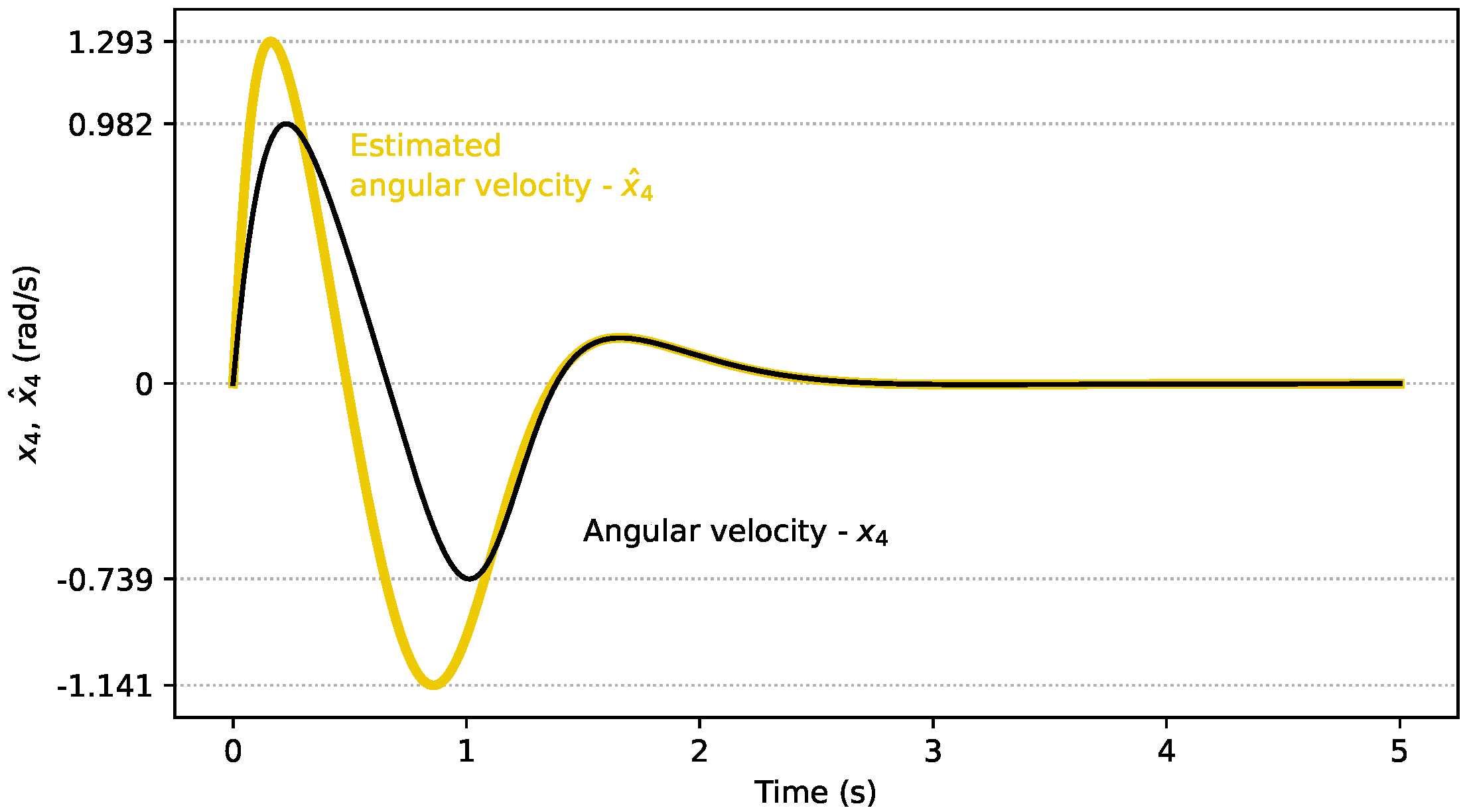
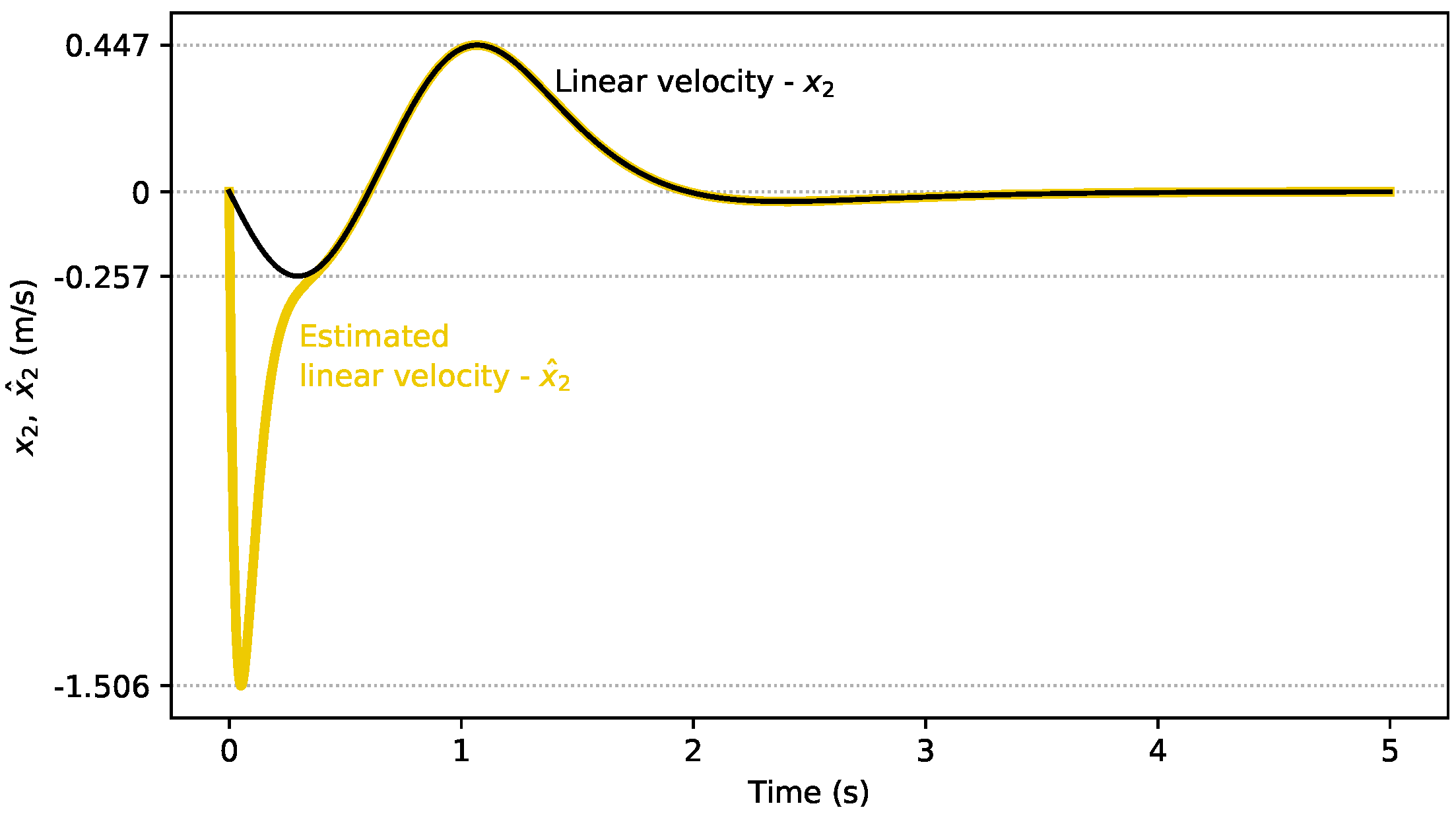
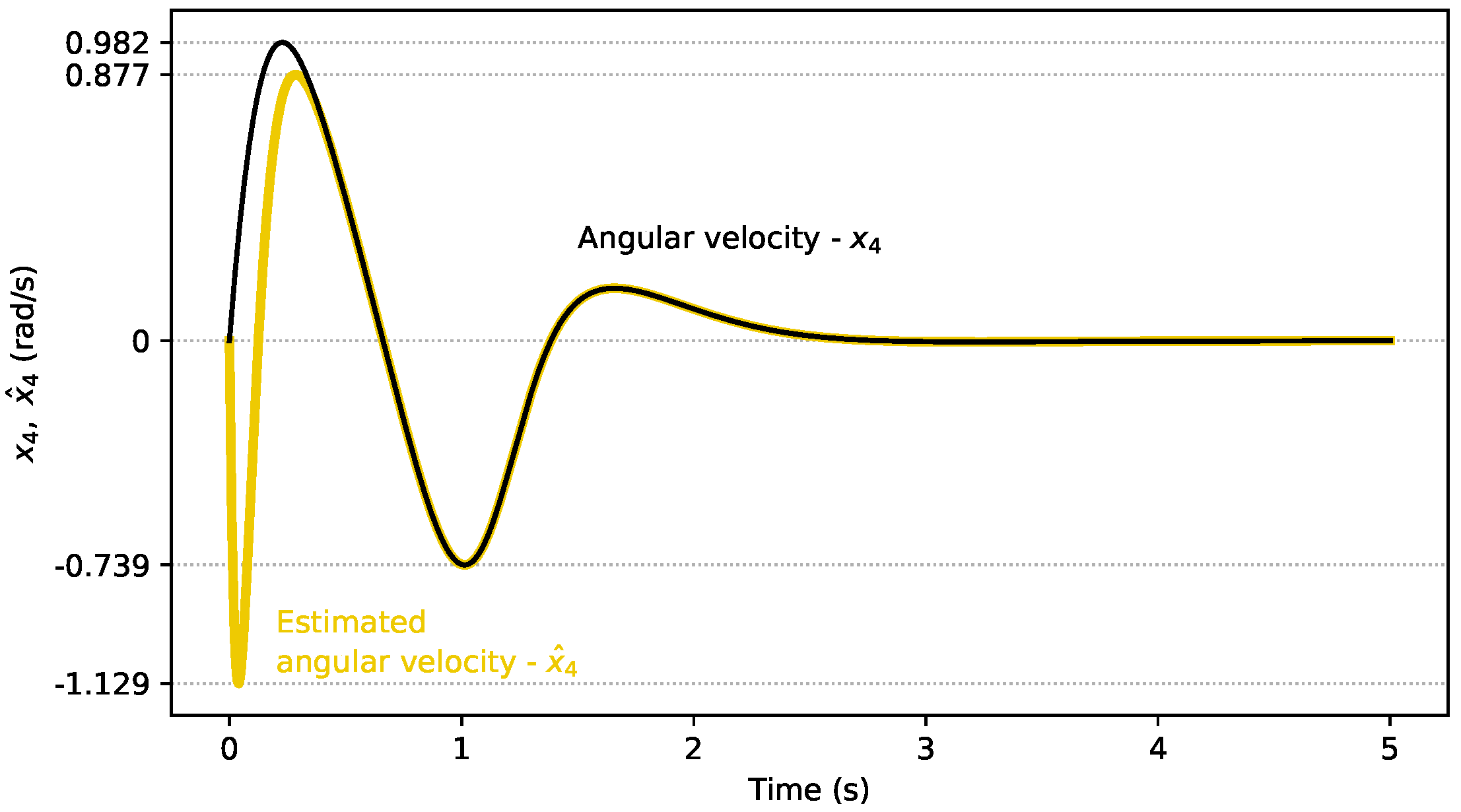
4.1. Linear Observer Results
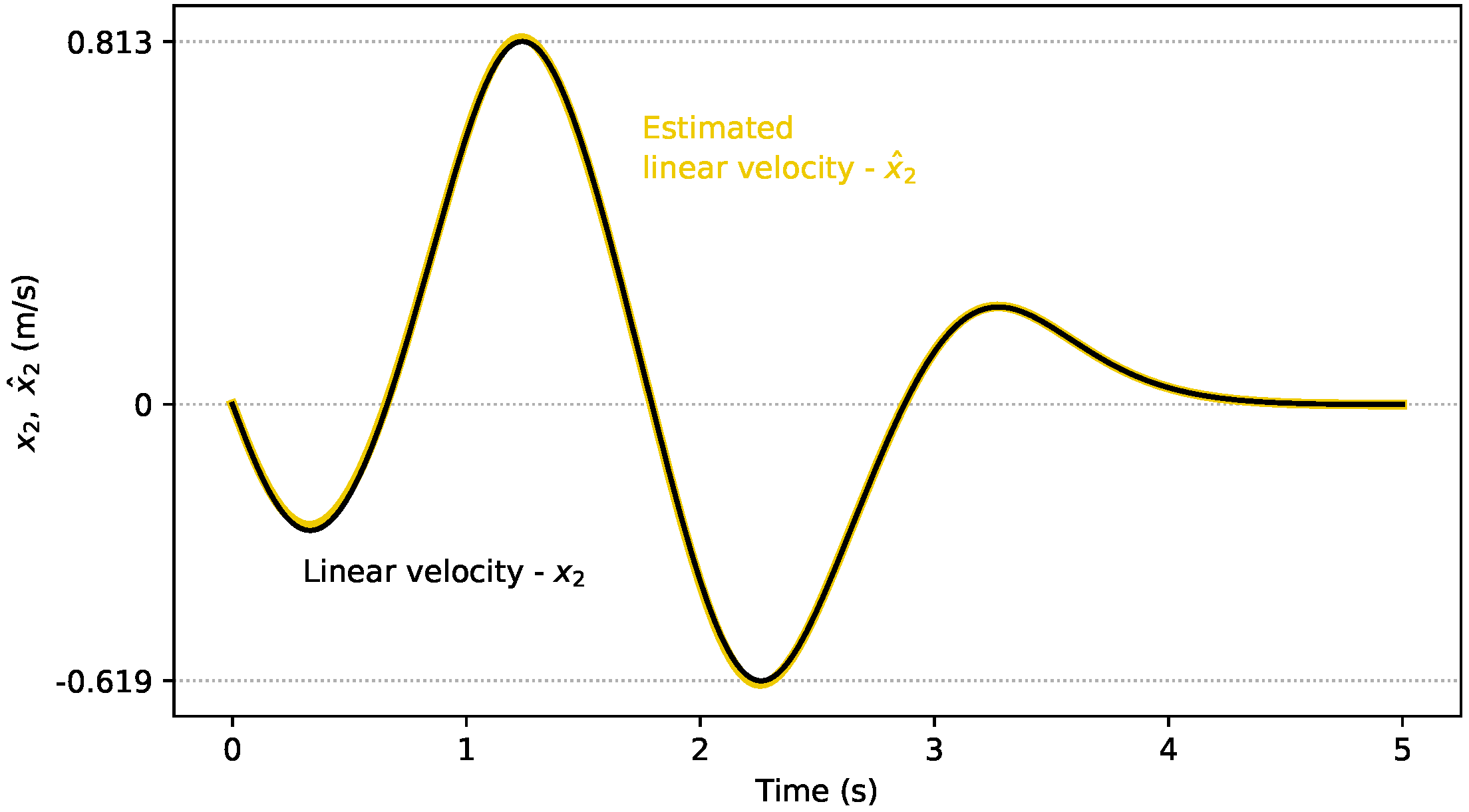
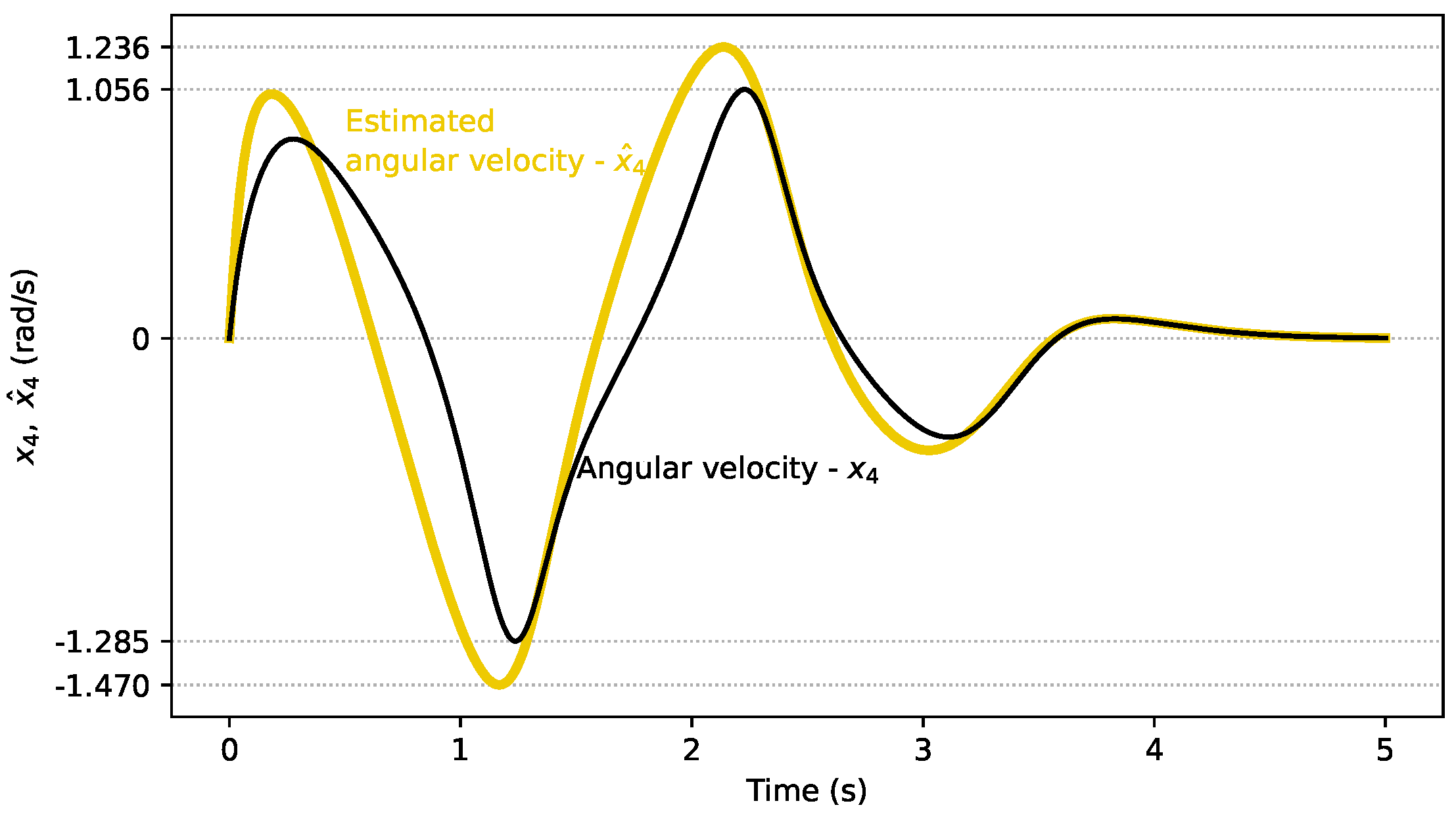
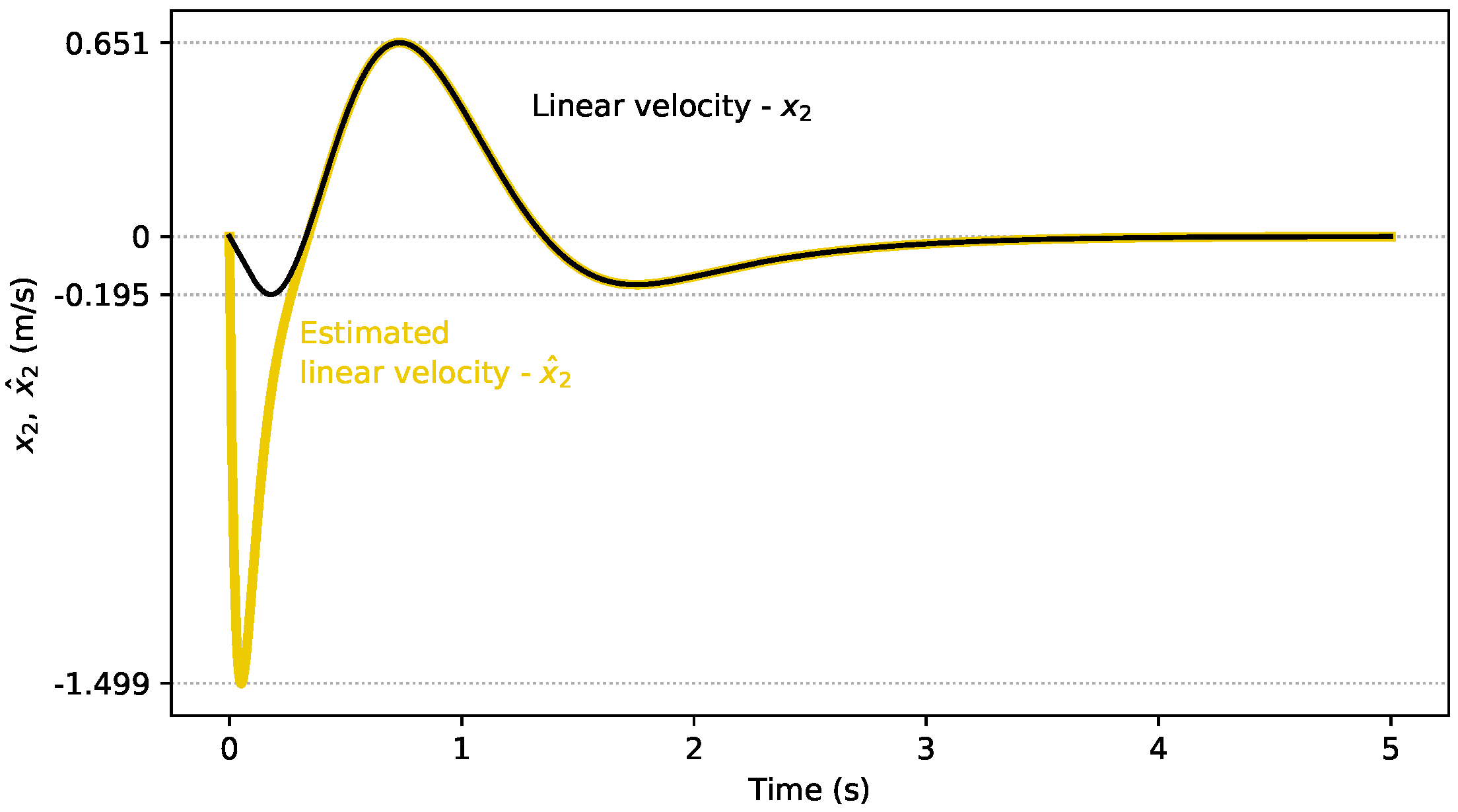
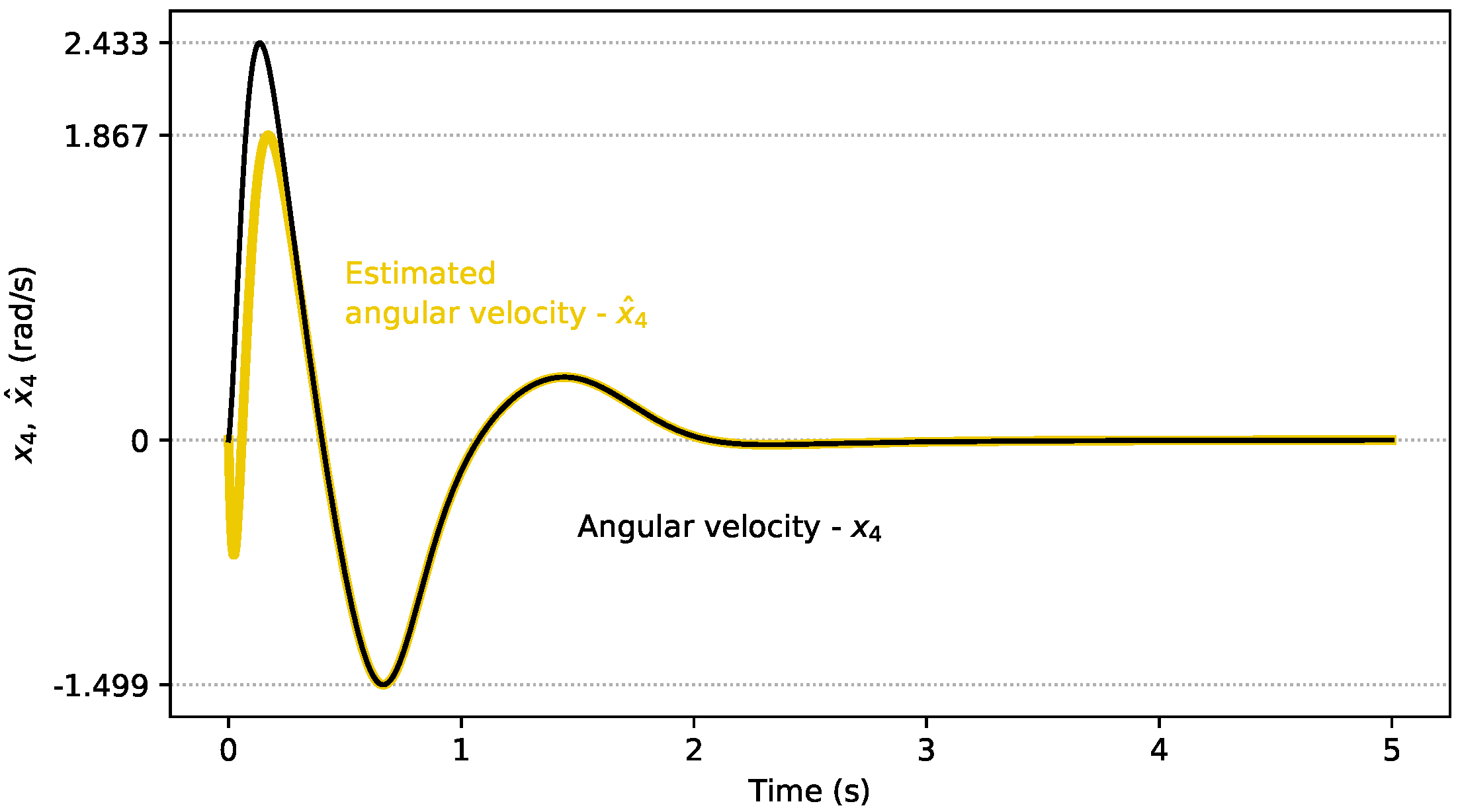
4.2. Nonlinear Observer Results
5. Discussion and Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ahmad, B.; Hussain, I. Design and hardware implementation of ball & beam setup. In Proceedings of the 2017 Fifth International Conference on Aerospace Science & Engineering (ICASE), Islamabad, Pakistan, 14–16 November 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Takacs, G.; Mikulas, E.; Vargova, A.; Konkoly, T.; Sima, P.; Vadovic, L.; Biro, M.; Michal, M.; Simovec, M.; Gulan, M. BOBShield: An open-source miniature ‘ball-and-beam’ device for control engineering education. In Proceedings of the 2021 IEEE Global Engineering Education Conference (EDUCON), Vienna, Austria, 21–23 April 2021; Volume 2021, pp. 1155–1161. [Google Scholar] [CrossRef]
- Šitum, Z.; Trslić, P. Ball and beam balancing mechanism actuated with pneumatic artificial muscles. J. Mech. Robot. 2018, 10, 055001. [Google Scholar] [CrossRef]
- Mazenc, F.; Astolfi, A.; Lozano, R. Lyapunov function for the ball-and-beam: Robustness property. In Proceedings of the 38th IEEE Conference on Decision and Control, Phoenix, AZ, USA, 7–10 December 1999; Volume 2, pp. 1208–1213. [Google Scholar] [CrossRef]
- Sira-Ramirez, H. On the control of the “ball-and-beam” system: A trajectory planning approach. In Proceedings of the 39th IEEE Conference on Decision and Control, Sydney, NSW, Australia, 12–15 December 2000; Volume 4, pp. 4042–4047. [Google Scholar] [CrossRef]
- Huang, J.; Lin, C.F. Robust nonlinear control of the ball-and-beam system. In Proceedings of the 1995 American Control Conference—ACC’95, Seattle, WA, USA, 21–23 June 1995; Volume 1, pp. 306–310. [Google Scholar] [CrossRef]
- Teel, A.R. Semi-global stabilization of the ‘ball-and-beam’ using ‘output’ feedback. In Proceedings of the 1993 American Control Conference, San Francisco, CA, USA, 2–4 June 1993; pp. 2577–2581. [Google Scholar]
- Aguilar-Ibanez, C.; Suarez-Castanon, M.S.; de Jesus Rubio, J. Stabilization of the Ball on the Beam System by Means of the Inverse Lyapunov Approach. Math. Probl. Eng. 2012, 2012, 810597. [Google Scholar] [CrossRef]
- Lemos, J.; Silva, R.; Marques, J. Adaptive control of the ball-and-beam plant in the presence of sensor measure outliers. In Proceedings of the 2002 American Control Conference, Anchorage, AK, USA, 8–10 May 2002; Volume 6, pp. 4612–4613. [Google Scholar] [CrossRef]
- Marton, L.; Lantos, B. Stable Adaptive Ball and Beam Control. In Proceedings of the 2006 International Conference on Mechatronics and Automation, Luoyang, China, 25–28 June 2006; pp. 507–512. [Google Scholar] [CrossRef]
- Turker, T.; Gorgun, H.; Zergeroglu, E.; Cansever, G. Exact Model Knowledge and Direct Adaptive Controllers on Ball and Beam. In Proceedings of the 2007 4th IEEE International Conference on Mechatronics, ICM 2007, Cairo, Egypt, 29–31 December 2007; pp. 1–6. [Google Scholar] [CrossRef]
- Koo, M.S.; Choi, H.L.; Lim, J.T. Adaptive Nonlinear Control of A Ball And Beam System Using The Centrifugal Force Term. Int. J. Innov. Comput. Inf. Control 2012, 8, 5999–6009. [Google Scholar]
- Naredo, E.; Castillo, O. ACO-Tuning of a Fuzzy Controller for the Ball and Beam Problem. In Advances in Soft Computing; Lecture Notes in Computer, Science; Batyrshin, I., Sidorov, G., Eds.; Springer: Berlin/Heidelberg, Germany, 2011; Volume 7095, pp. 58–69. [Google Scholar]
- Xi, Z.; Hesketh, T. Ball and Beam System—Nonlinear MPC Using Hammerstein Model. In Proceedings of the 2nd IEEE Conference on Industrial Electronics and Applications (ICIEA 2007), Harbin, China, 23–25 May 2007; pp. 2294–2298. [Google Scholar] [CrossRef]
- Uran, S.; Jezernik, K. Control of a ball-and-beam like mechanism. In Proceedings of the 7th International Workshop on Advanced Motion Control, Maribor, Slovenia, 3–5 July 2002; pp. 376–380. [Google Scholar] [CrossRef]
- Guo, Y.; Hill, D.; Jiang, Z.P. Global nonlinear control of the ball-and-beam system. In Proceedings of the 7th International Workshop on Advanced Motion Control, Maribor, Slovenia, 3–5 July 1996; Volume 3, pp. 2818–2823. [Google Scholar] [CrossRef]
- Andreev, F.; Auckly, D.; Kapitanski, L.; Kelkar, A.; White, W. Matching control laws for a ball-and-beam system. In Proceedings of the 7th IFAC Workshop on Lagrangian and Hamiltonian Methods for Nonlinear Control, Berlin, Germany, 11–13 October 2000. [Google Scholar]
- Hauser, J.; Sastry, S.; Kokotovic, P. Nonlinear Control Via Approximate Input Output Linearization—The Ball and Beam Example. IEEE Trans. Autom. Control 1992, 37, 392–398. [Google Scholar] [CrossRef]
- Ortega, R.; Spong, M.W. Stabilization of Underactuated Mechanical Systems via Interconnection and Damping Assignment. IFAC Proc. Vol. 2000, 33, 69–74. [Google Scholar] [CrossRef]
- Krishna, B.; Gangopadhyay, S.; George, J. Design and Simulation of Gain Scheduling PID Controller for Ball and Beam System. Proceedings of International Conference on Systems, Signal Processing &Manufacturing Engineering, Dubai, United Arab Emirates, 26–27 December 2012. [Google Scholar]
- Banu Sundareswari, M.; Then Mozhi, G.; Dhanalakshmi, K. Intelligent Tuning of PID Controller to Balance the Shape Memory Wire Actuated Ball and Beam System. Phys. Mesomech. 2020, 23, 621–630. [Google Scholar] [CrossRef]
- Chang, Y.H.; Chan, W.S.; Chang, C.W. T-S Fuzzy Model-Based Adaptive Dynamic Surface Control for Ball and Beam System. Ind. Electron. IEEE Trans. 2013, 60, 2251–2263. [Google Scholar] [CrossRef]
- Asadi, H.; Mohammadi, A.; Oladazimi, M. Stabilization ball and beam by fuzzy logic control strategy. In Proceedings of the Fourth International Conference on Machine Vision (ICMV 2011): Machine Vision, Image Processing, and Pattern Analysis, Singapore, 9–10 December 2011; Zeng, Z., Li, Y., Eds.; International Society for Optics and Photonic: Singapore, 2012; Volume 8349, pp. 711–717. [Google Scholar]
- Minh, V.; Mart, T.; Moezzi, R.; Oliver, M.; Martin, J.; Ahti, P.; Leo, T.; Mart, J. Performances of PID and Different Fuzzy Methods for Controlling a Ball on Beam. Open Eng. 2016, 6, 145–151. [Google Scholar] [CrossRef]
- Aziz, N.N.A.; Yusoff, M.I.; Solihin, M.I.; Akmeliawati, R. Two degrees of freedom control of a ball-and-beam system. IOP Conf. Ser. Mater. Sci. Eng. 2013, 53, 012070. [Google Scholar] [CrossRef]
- Jo, N.; Seo, J. A state observer for nonlinear systems and its application to ball and beam system. Autom. Control. IEEE Trans. 2000, 45, 968–973. [Google Scholar] [CrossRef]
- Jo, N.; Jin, J.; Joo, S.; Seo, J. Generalized Luenberger-like observer for nonlinear systems. In Proceedings of the 1997 American Control Conference Albuquerque Convention Center, Albuquerque, NM, USA, 6 June 1997; Volume 3, p. 2180. [Google Scholar] [CrossRef]
- Grabowski, P. Stability of Lurie Systems; Wydawnictwa AGH: Kraków, Poland, 1999. [Google Scholar]
- Zhou, T.; Zuo, Z.; Wang, Y.; Li, H. Synchronization of Lurie Systems under Limited Network Transmission Capacity with Quantization and One-Step Packet Dropout: An Active Method. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 4920–4928. [Google Scholar] [CrossRef]
- Gruyitch, L.; Bučevac, Z.; Jovanović, R.; Ribar, Z. Structurally variable control of Lurie systems. Int. J. Control 2020, 93, 2960–2972. [Google Scholar] [CrossRef]
- Zhou, S.; Gao, Y. Bipartite synchronization of coupled Lurie networks with signed graph and time-varying delay. Eur. J. Control 2021, 58, 388–398. [Google Scholar] [CrossRef]
- Pinheiro, R.; Colón, D. Analysis and synthesis of single-input-single-output Lurie type systems via H∞ mixed-sensitivity. Trans. Inst. Meas. Control. 2021. [Google Scholar] [CrossRef]
- Sun, C.X.; Liu, X. A state observer for the computational network model of neural populations. Chaos 2021, 31, 013127. [Google Scholar] [CrossRef] [PubMed]
- Ganobis, M.; Chudyba, P. Model and Control of Variable Moment of Inertia System. Master’s Thesis, AGH—University of Science and Technology, Kraków, Poland, 2006. [Google Scholar]
- YI, J.; Yubazaki, N.; Hirota, K. Stabilization Controlof Ball and Beam Systems. In Proceedings of the Joint 9th IFSA World Congress and 20th NAFIPS International Conference, Vancouver, BC, Canada, 25–28 July 2001; Volume 4, pp. 2229–2234. [Google Scholar]
- Bodson, M. Fun control experiments with Matlab and a joystick. In Proceedings of the 2003 42nd IEEE Conference on Decision and Control, Maui, HI, USA, 9–12 December 2003; Volume 3, pp. 2508–2513. [Google Scholar] [CrossRef][Green Version]
- Wellstead, P. Introduction to Physical System Modelling; Mathematics in Science and Engineering Series; Academic Press: Cambridge, MA, USA, 1979. [Google Scholar]
- Ganobis, M. On a control of variable moment of inertia system “ball on beam”. Autom. Akad.-GÓRniczo-Hut. Im. StanisAwa Staszica Krakowie 2008, 12, 197–209. [Google Scholar]
- Keshmiri, M.; Jahromi, A.F.; Mohebbi, A.; Amoozgar, M.H.; Xie, W.F. Modeling And Control Of Ball And Beam System Using Model Based And Non-Model Based Control Approaches. Int. J. Smart Sens. Intell. Syst. 2012, 5, 14. [Google Scholar] [CrossRef]
- Elsogc, L. Rachunek Wariacyjny; PWN: Warszawa, Poland, 1960. [Google Scholar]
- Nijmejer, H.; van der Schaft, A. Nonlinear Dynamical Control Systems; Springer: Berlin/Heidelberg, Germany, 1991. [Google Scholar]
- Klamka, J. Controllability of Dynamical Systems; Kluwer Academic Publishers: Dordrecht, The Netherlands, 1991. [Google Scholar]
- Kaczorek, T. Teoria Układów Regulacji Automatycznej; WNT: Warszawa, Poland, 1977. [Google Scholar]
- Baranowski, J. State estimation in linear multi-output systems-design example and discussion of optimality. Autom. Górniczo-Hut. Im. Stanisława Staszica W Krakowie 2006, 10, 119–131. [Google Scholar]
- Mitkowski, W.; Baranowski, J. Observer design for series DC motor–multi output approach. In Proceedings of the Materiały XXX Międzynarodowej konferencji z podstaw elektrotechniki i teorii obwodów IC-SPETO, Ustroń, Poland, 23–26 May 2007; pp. 135–136. [Google Scholar]
- Matlab® Control System Toolbox™. Available online: https://www.mathworks.com/products/control.html (accessed on 10 September 2021).
- Python Control System Library. Available online: https://python-control.readthedocs.io/en/0.9.0/ (accessed on 10 September 2021).
- Kautsky, J.; Nichols, N.K.; Dooren, P.V. Robust pole assignment in linear state feedback. Int. J. Control 1985, 41, 1129–1155. [Google Scholar] [CrossRef]
- Turowicz, A. Teoria Macierzy; Wydawnictwa AGH: Kraków, Poland, 2005. [Google Scholar]
- Kudrewicz, J. Frequency Methods in the Theory of Nonlinear Dynamical Systems; WNT: Warszawa, Poland, 1970. [Google Scholar]
- Arcak, M.; Kokotović, P. Nonlinear observers: A circle criterion design and robustness analysis. Automatica 2001, 37, 1923–1930. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Physical Parameters | Computational Parameters | ||
|---|---|---|---|
| m | 0.208 kg | 7.007 | |
| r | 0.018 m | 0.7143 | |
| 0.4 m | 0.0365 | ||
| 0.0075 kg·m | 0.1814 | ||
| g | 9.81 | 4.8077 | |
| b | 0 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Baranowski, J. Observer Design for a Variable Moment of Inertia System. Energies 2021, 14, 5850. https://doi.org/10.3390/en14185850
Baranowski J. Observer Design for a Variable Moment of Inertia System. Energies. 2021; 14(18):5850. https://doi.org/10.3390/en14185850
Chicago/Turabian StyleBaranowski, Jerzy. 2021. "Observer Design for a Variable Moment of Inertia System" Energies 14, no. 18: 5850. https://doi.org/10.3390/en14185850
APA StyleBaranowski, J. (2021). Observer Design for a Variable Moment of Inertia System. Energies, 14(18), 5850. https://doi.org/10.3390/en14185850