
Dynamic Influence of Wheel Flat on Fatigue Life of the Traction Motor Bearing in Vibration Environment of a Locomotive


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Dynamic Model Formulation
2.1. LTM
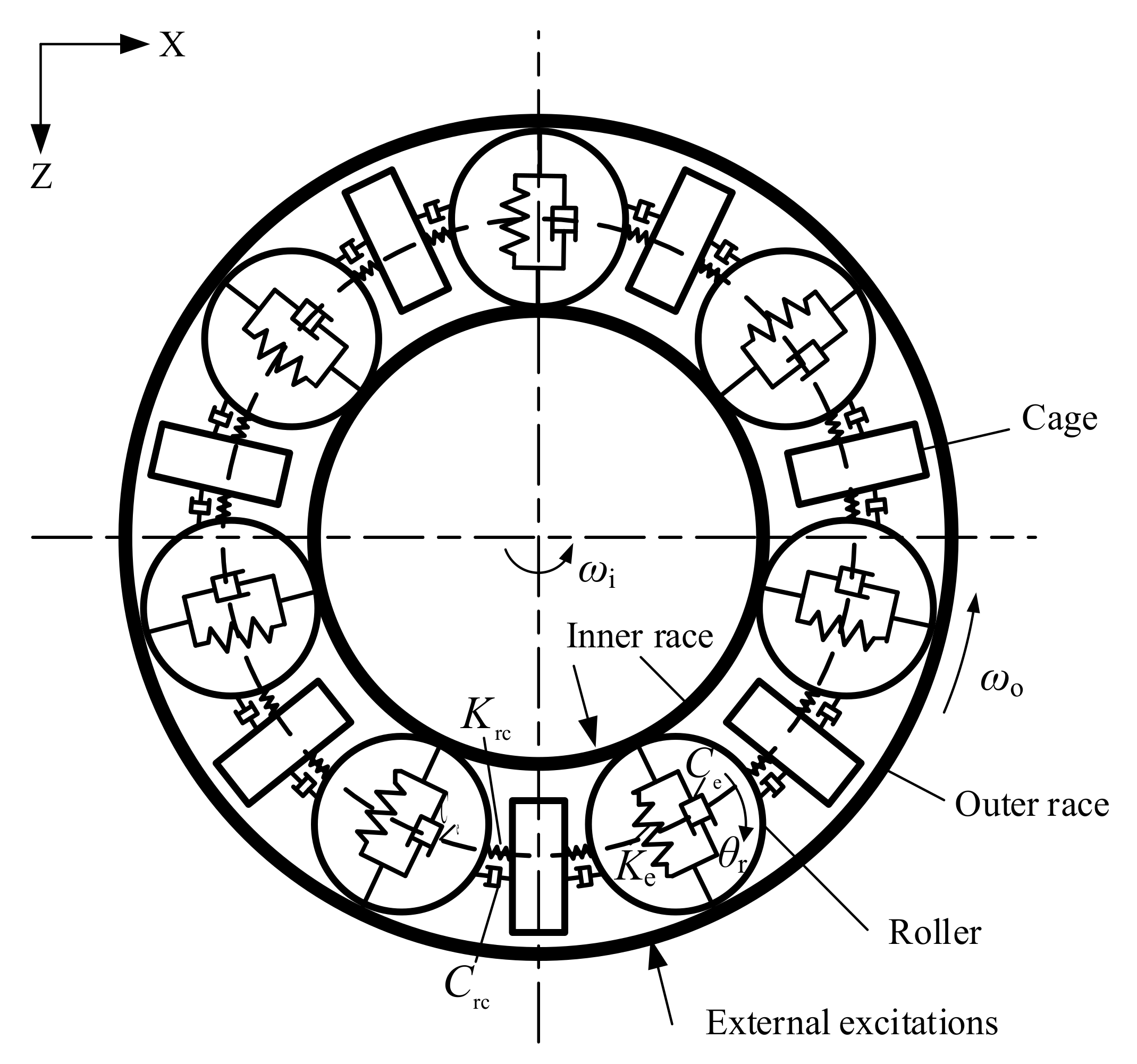
2.2. Dynamics Modeling of Rolling Bearing
2.3. Mesh Forces of Gear Transmission
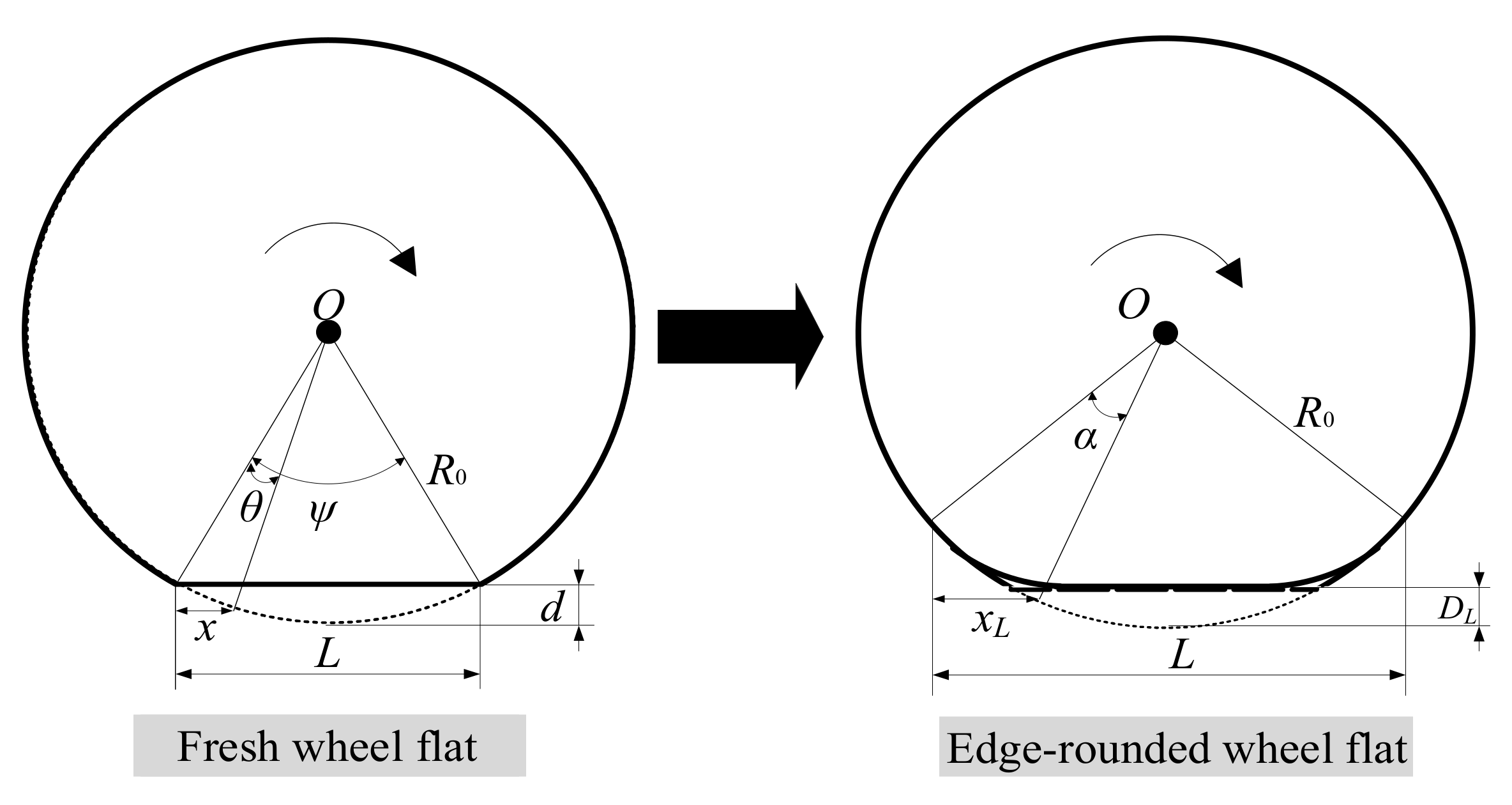
2.4. The Model of Wheel–Rail Interaction
2.5. Fatigue Life Prediction Method of Rolling Bearing
3. Result Discussions
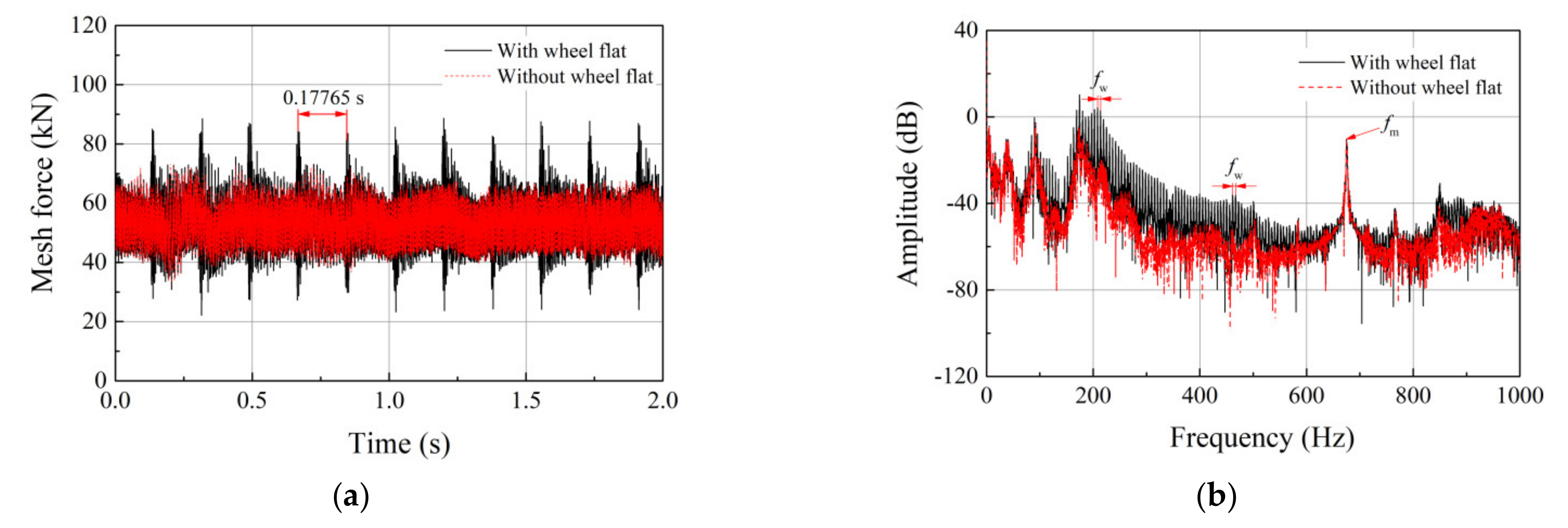
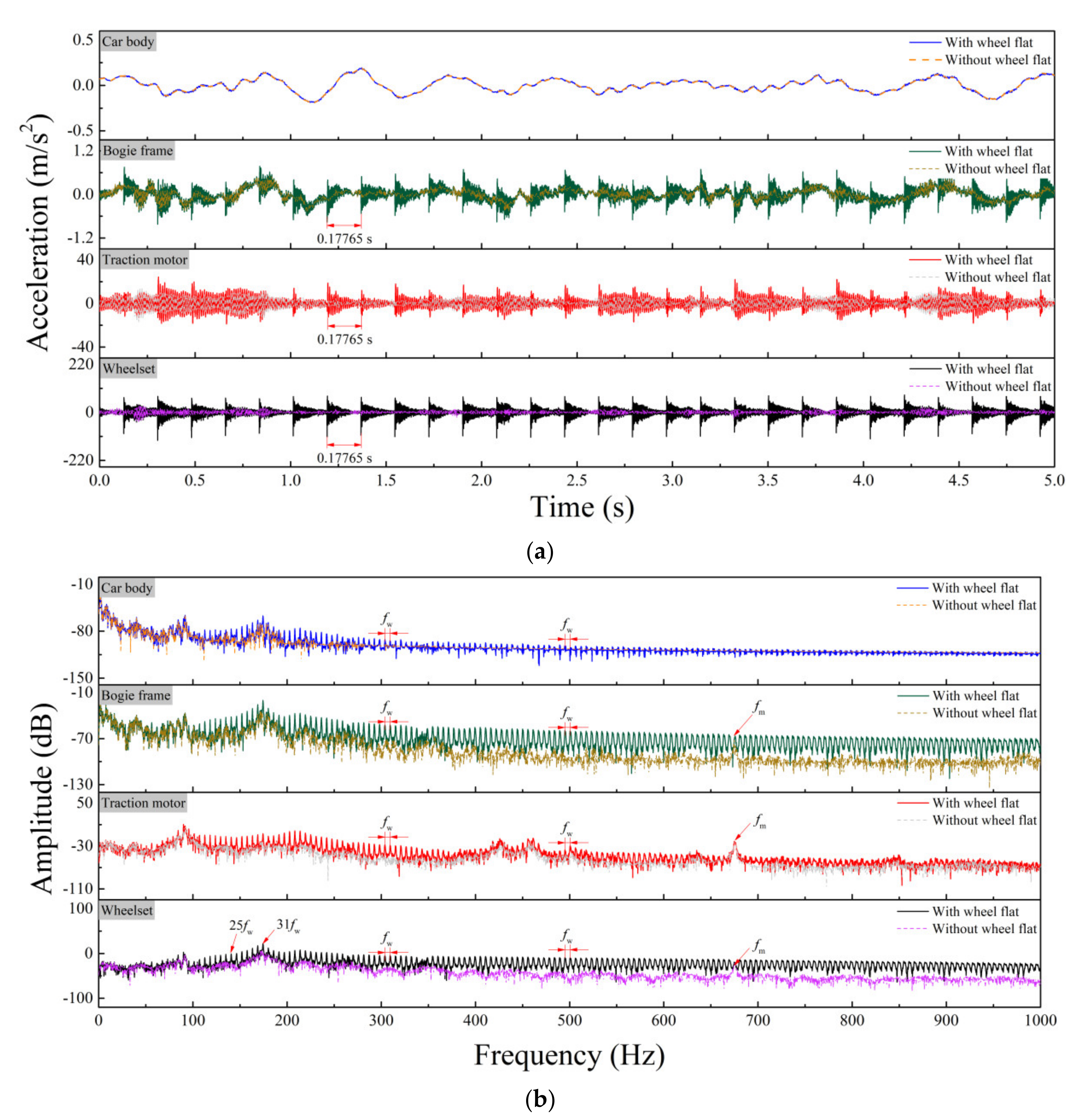
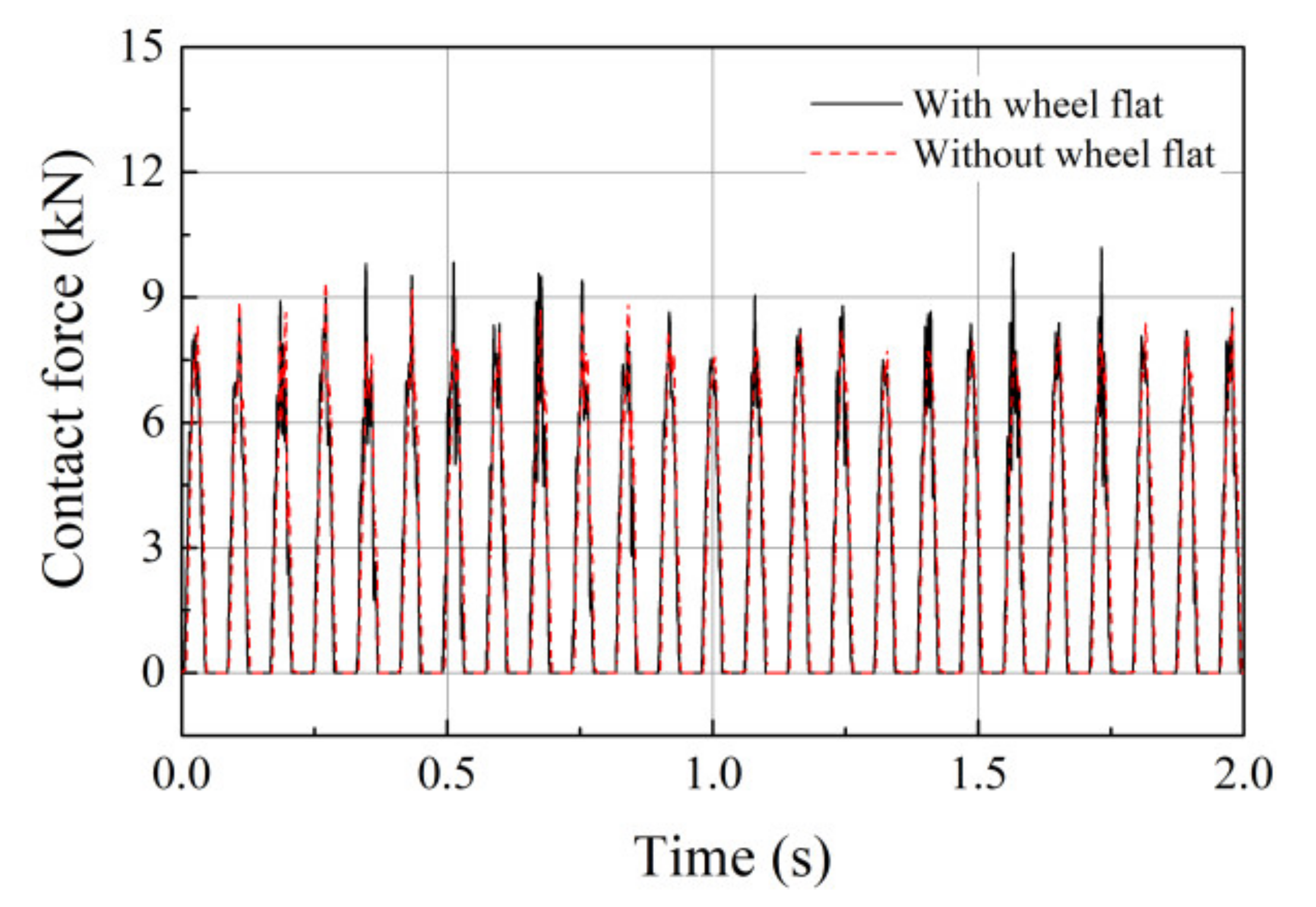
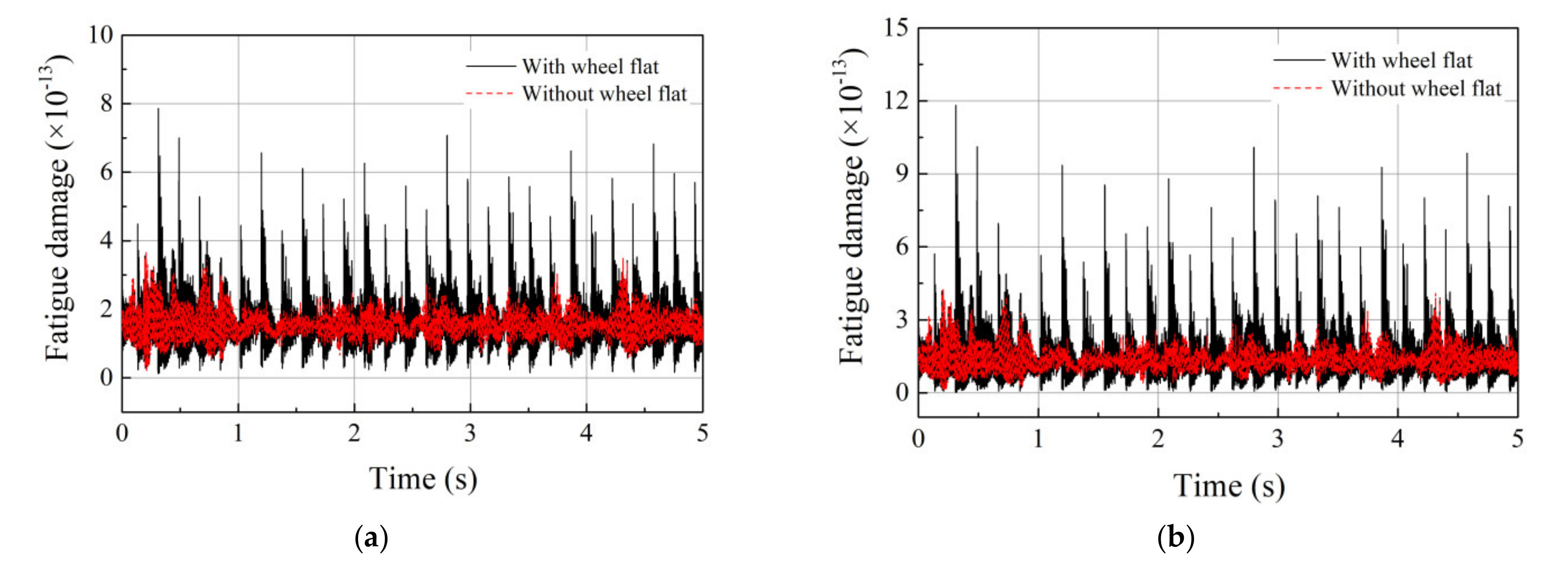
3.1. Dynamic Performance of System under the Effect of a Wheel Flat
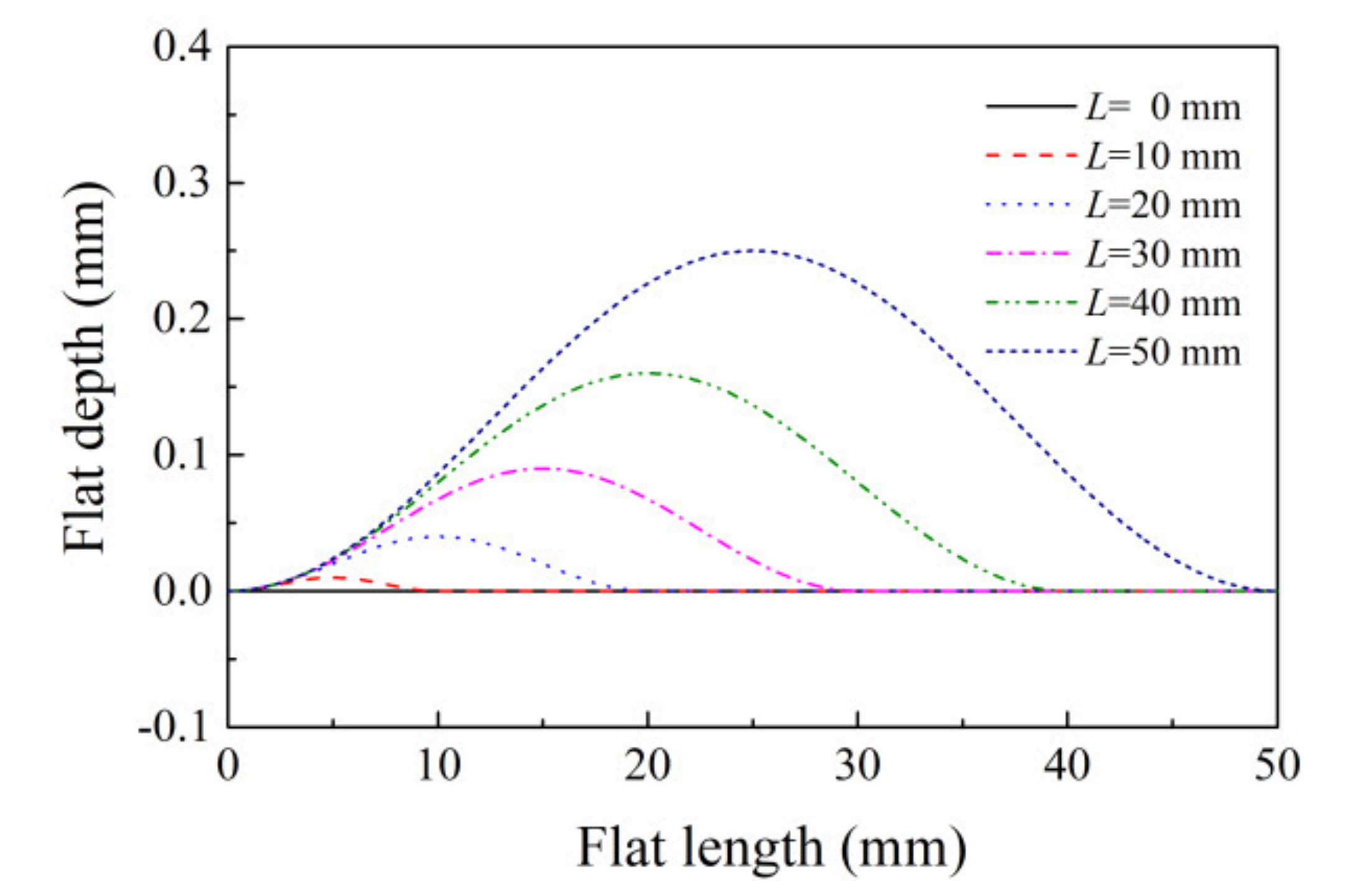
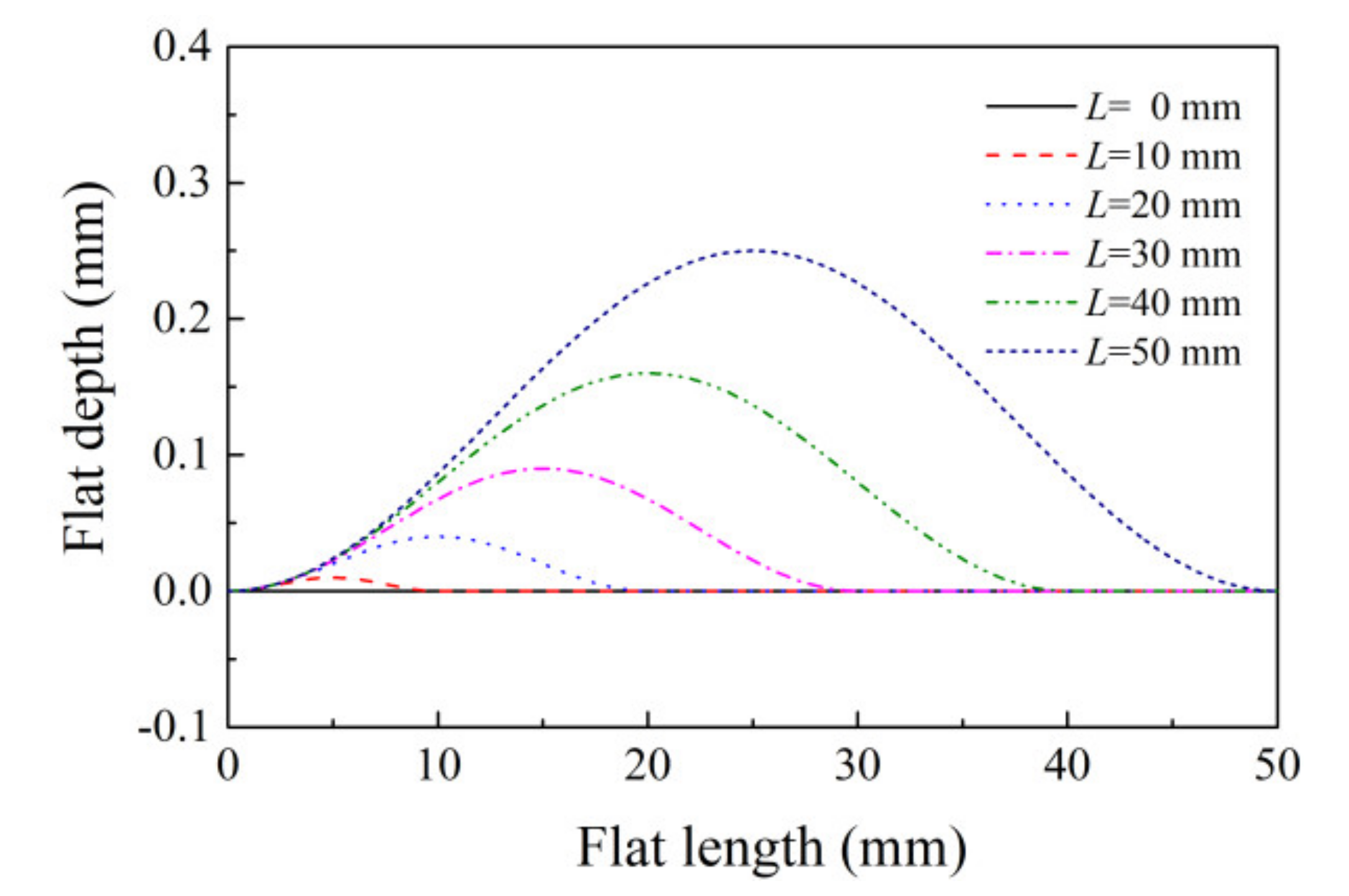
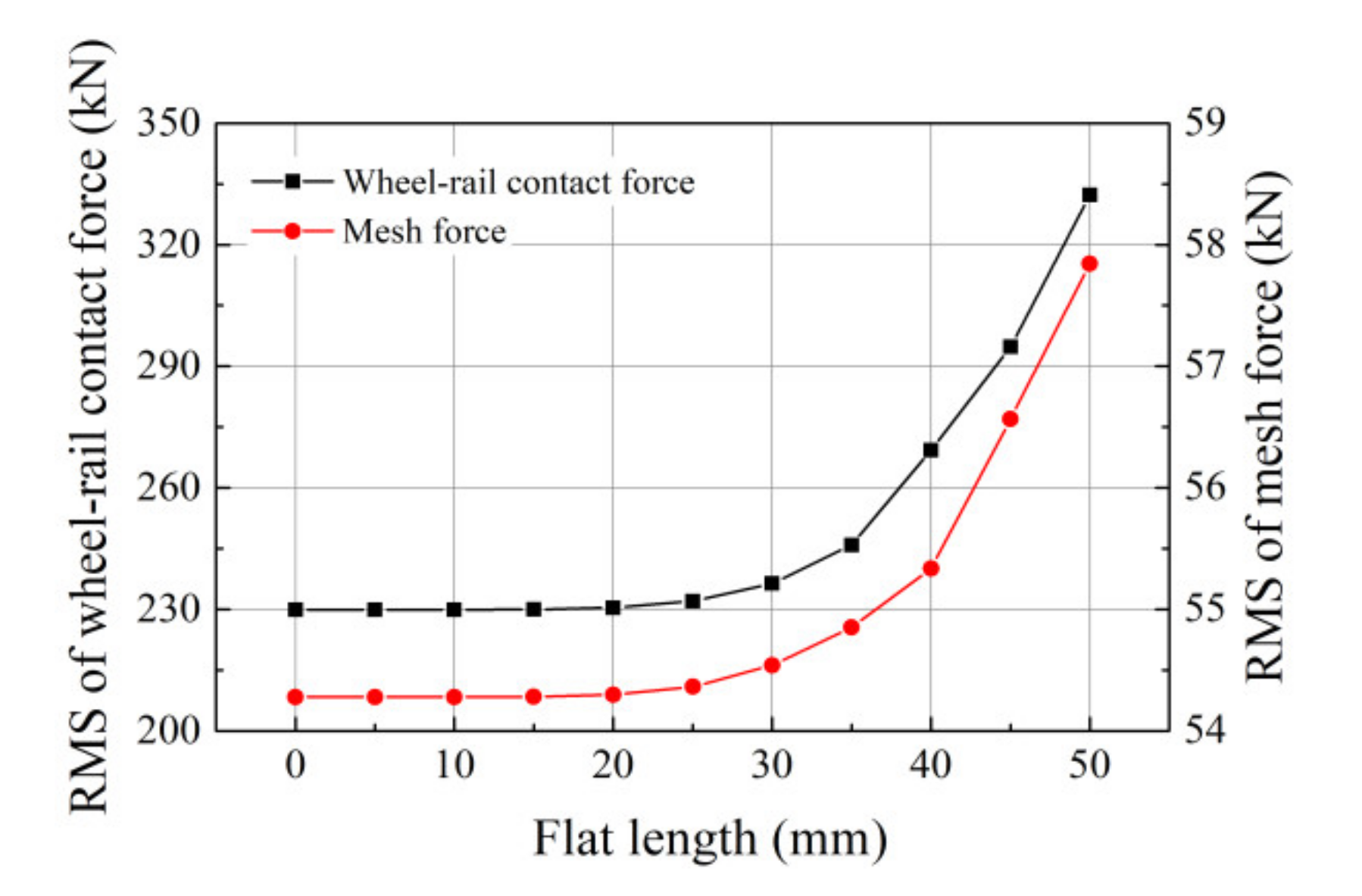
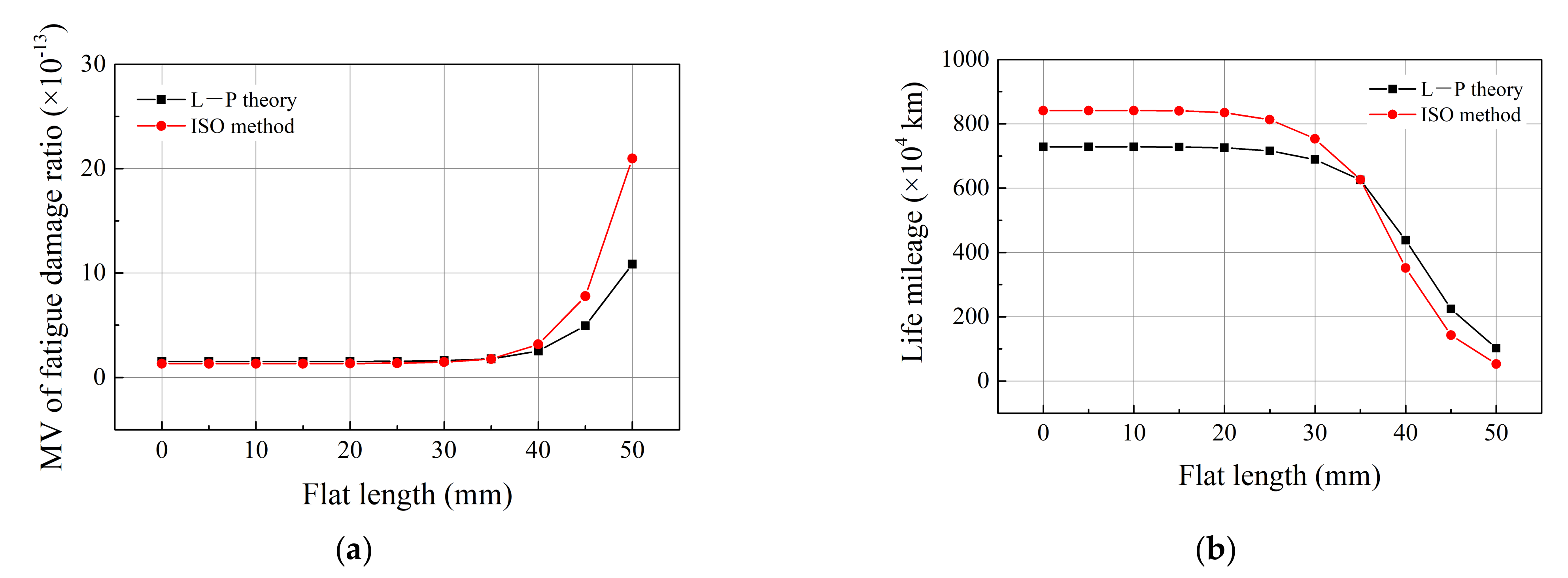
3.2. Effect of Flat Length
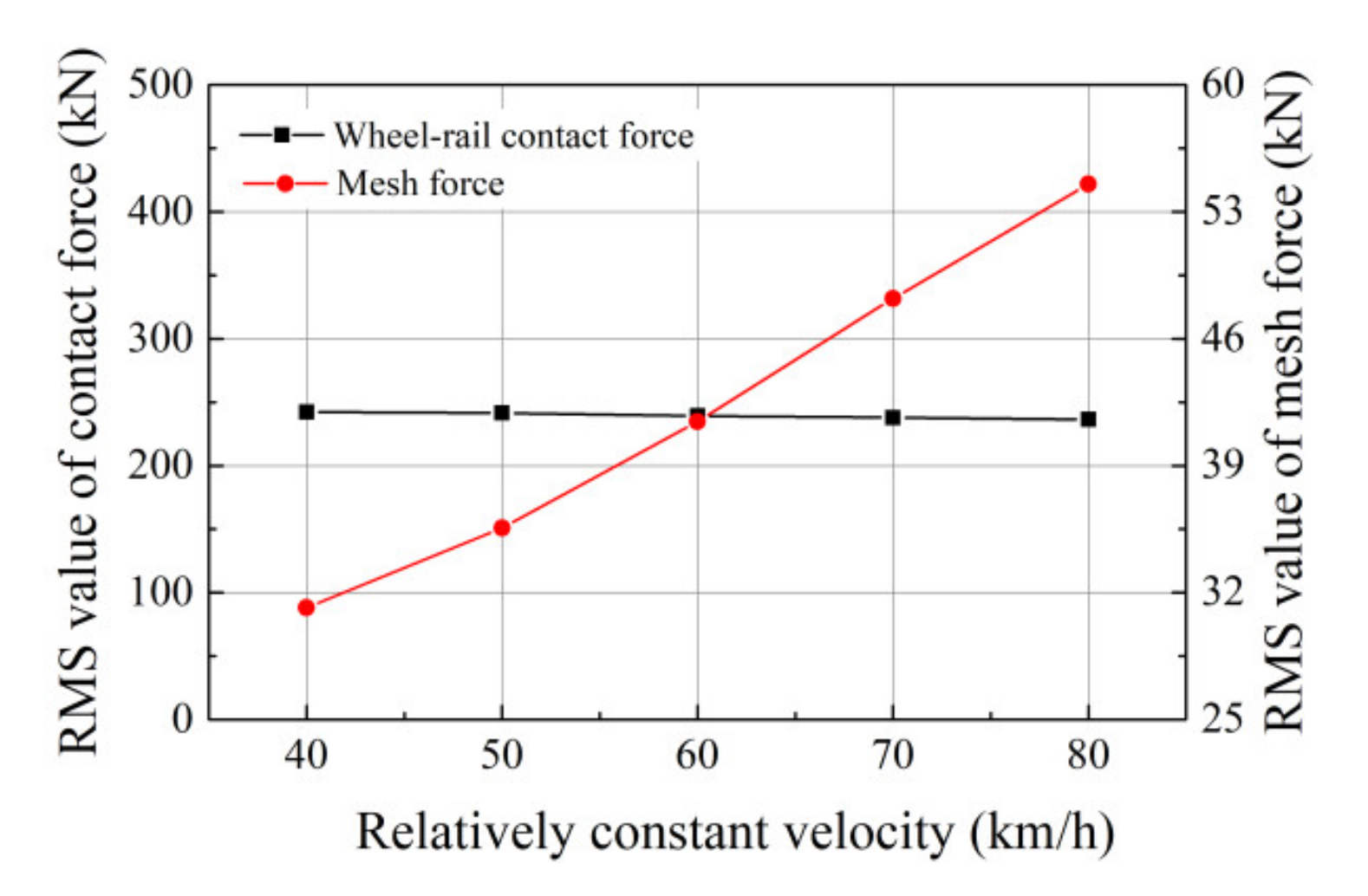
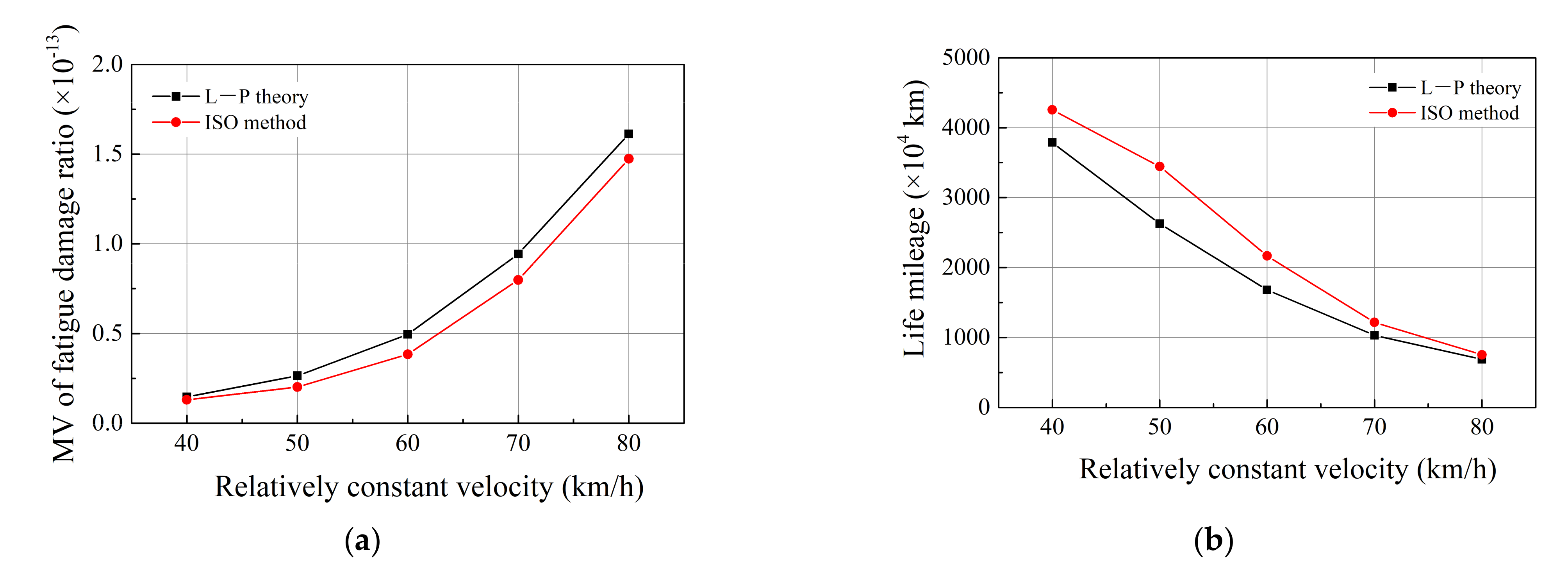
3.3. Effect of Relatively Constant Velocity
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| b0 | Manufacture and assembly errors of gear transmission, m |
| Cc | Contact damping between the roller and cage, N·s/m |
| Cm | Mesh damping, N·s/m |
| Ci | Basic dynamic load acting on inner race, N |
| Co | Basic dynamic load acting on outer race, N |
| CISO | Basic dynamic load acting on rolling bearing, N |
| DL | Depth of the wheel flat, m |
| e | Radial clearance of rolling bearing, m |
| ei | Clearance of gear transmission, m |
| Fc | Roller−cage friction force, N |
| Fi | Roller−inner race friction force, N |
| Fix | Resultant force of the rolling bearing acting on inner race in longitudinal direction, N |
| Fiz | Resultant force of the rolling bearing acting on inner race in vertical direction, N |
| Fo | Friction force between the roller and outer race, N |
| Fox | Resultant force of the rolling bearing acting on outer race in longitudinal direction, N |
| Foz | Resultant force of the rolling bearing acting on outer race in vertical direction, N |
| Fm | Mesh force, N |
| g | Gravitational constant, m/s2 |
| Ir | Moment of inertia of roller, kg·m2 |
| j | Serial number of roller |
| Kc | Roller−cage contact stiffness, N/m |
| Ke | Equivalent contact stiffness between races via the roller, N/m |
| Km | Time−varying mesh stiffness, N/m |
| k | Number of columns of the rolling bearing |
| L | Length of the edge-rounded wheel flat, m |
| Le | Equivalent contact length between the roller and race, m |
| li | Actual inner race revolution in one integration step, r |
| Li | Theoretical inner race revolution in one integration step, r |
| Li | Fatigue life based on contact loads of inner race, ×106 r |
| Lo | Fatigue life based on contact loads of outer race, ×106 r |
| mr | Mass of the roller, kg |
| n | Load−deformation coefficient |
| Nb | Number of rollers |
| Nc | Roller−cage contact force, N |
| Ni | Roller−inner race contact force, N |
| No | Roller−outer race contact force, N |
| Pi | Equivalent bearing load acting on inner race, N |
| Po | Equivalent bearing load acting on outer race, N |
| PISO | Equivalent bearing load acting on rolling bearing, N |
| Rr | Radius of roller, m |
| Rm | Pitch radius, m |
| Rp | Base circle radius of pinion, m |
| Rg | Base circle radius of gear, m |
| X | Bearing races relative displacement in longitudinal direction, m |
| Xp | Displacements of pinion in the longitudinal direction, m |
| Xg | Displacements of gear in the longitudinal direction, m |
| xL | Distance along the wheel circumference, m |
| Z | Bearing races relative displacement in vertical directions, m |
| Zf | Variation of the wheel radius, m |
| Zp | Displacements of pinion in the vertical direction, m |
| Zg | Displacements of gear in the vertical direction, m |
| Zw | Vertical displacements of wheelset, m |
| Zrail | Vertical displacements of rail, m |
| Z0 | Track irregularity, m |
| θr | Rotational motion of roller, rad |
| σr | Circumferential motions of roller, rad |
| σc | Circumferential motions of cage, rad |
| μc | Roller−cage friction coefficient |
| μ | Time−varying lubricant friction coefficient |
| ΔVi | Relative slip velocities between the roller and inner race, m/s |
| ΔVo | Relative slip velocities between the roller and outer race, m/s |
| χj | Load zone parameter |
| ωi | Rotational velocities of the inner ring, rad/s |
| ωo | Rotational velocities of the outer ring, rad/s |
| δ | Dynamic transmission error, m |
| α | Contact angle between the roller and race, rad |
| αm | Pressure angle of gear pair, rad |
| αw | Angular along the wheel circumference, rad |
| εi | Fatigue damage ratio in one integration step |
| λi | Reduction factor of inner race for the stress concentration |
| λo | Reduction factor of outer race for the stress concentration |
| γ | Structure parameter of the rolling bearing |
References
- Alam Uzzal, R.U.; Ahmed, W.; Rakheja, S. Dynamic analysis of railway vehicle-track interactions due to wheel flat with a pitch-plane vehicle model. J. Mech. Eng. 2008, 39, 86–94. [Google Scholar] [CrossRef] [Green Version]
- Dong, R.G.; Sankar, S.; Dukkipati, R.V. A Finite Element Model of Railway Track and its Application to the Wheel Flat Problem. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 1994, 208, 61–72. [Google Scholar] [CrossRef]
- Zhu, J.; Ahmed, A.; Rakheja, S. An adaptive contact model for simulation of wheel-rail impact load due to a wheel flat. In Proceedings of the 13th National Conference on Mechanisms and Machines, IISc, Bangalore, India, 12–13 December 2007; pp. 157–164. [Google Scholar]
- Steenbergen, M.J.M.M. The role of the contact geometry in wheel–rail impact due to wheel flats. Veh. Syst. Dyn. 2007, 45, 1097–1116. [Google Scholar] [CrossRef]
- Bian, J.; Gu, Y.; Murray, M.H. A dynamic wheel–rail impact analysis of railway track under wheel flat by finite element analysis. Veh. Syst. Dyn. 2013, 51, 784–797. [Google Scholar] [CrossRef] [Green Version]
- Zhou, Z.; Chen, Z.; Spiryagin, M.; Arango, E.B.; Wolfs, P.; Cole, C.; Zhai, W. Dynamic response feature of electromechanical coupled drive subsystem in a locomotive excited by wheel flat. Eng. Fail. Anal. 2021, 122, 105248. [Google Scholar] [CrossRef]
- Zhai, W.; Sun, X. A Detailed Model for Investigating Vertical Interaction between Railway Vehicle and Track. Veh. Syst. Dyn. 1994, 23, 603–615. [Google Scholar] [CrossRef]
- Chen, Z.; Zhai, W.; Wang, K. Vibration feature evolution of locomotive with tooth root crack propagation of gear transmission system. Mech. Syst. Signal Process. 2019, 115, 29–44. [Google Scholar] [CrossRef]
- Liu, Y.; Chen, Z.; Zhai, W.; Wang, K. Dynamic investigation of traction motor bearing in a locomotive under excitation from track random geometry irregularity. Int. J. Rail Transp. 2021, 1–23. [Google Scholar] [CrossRef]
- Liu, Y.; Chen, Z.; Wang, K.; Zhai, W. Dynamic modelling of traction motor bearings in locomotive-track spatially coupled dynamics system. Veh. Syst. Dyn. 2021, 1–30. [Google Scholar] [CrossRef]
- Liu, Y.; Chen, Z.; Li, W.; Wang, K. Dynamic analysis of traction motor in a locomotive considering surface waviness on races of a motor bearing. Railw. Eng. Sci. 2021, 1–15. [Google Scholar] [CrossRef]
- Wang, T.; Wang, Z.; Song, D.; Zhang, W.; Li, J.; Chen, D. Effect of track irregularities of high-speed railways on the thermal characteristics of the traction motor bearing. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2020, 235, 22–34. [Google Scholar] [CrossRef]
- Lundberg, G.; Palmgren, A. Dynamic capacity of rolling bearings. J. Appl. Mech. 1949, 16, 165–172. [Google Scholar] [CrossRef]
- Palmgren, A. Ball and Roller Bearing Engineering, 3rd ed.; SKF Industries Inc.: Burbank, Philadelphia, 1959. [Google Scholar]
- Ioannides, E.; Harris, T.A. A New Fatigue Life Model for Rolling Bearings. J. Tribol. 1985, 107, 367–377. [Google Scholar] [CrossRef]
- Zhang, J.; Fang, B.; Hong, J.; Zhu, Y. Effect of preload on ball-raceway contact state and fatigue life of angular contact ball bearing. Tribol. Int. 2017, 114, 365–372. [Google Scholar] [CrossRef]
- Londhe, N.D.; Arakere, N.K.; Subhash, G. Extended Hertz Theory of Contact Mechanics for Case-Hardened Steels with Implications for Bearing Fatigue Life. J. Tribol. 2018, 140, 021401. [Google Scholar] [CrossRef]
- Gupta, P.K.; Zaretsky, E.V. New Stress-Based Fatigue Life Models for Ball and Roller Bearings. Tribol. Trans. 2018, 61, 304–324. [Google Scholar] [CrossRef]
- Jouini, N.; Revel, P.; Thoquenne, G. Influence of surface integrity on fatigue life of bearing rings finished by precision hard turning and grinding. J. Manuf. Process. 2020, 57, 444–451. [Google Scholar] [CrossRef]
- ISO. ISO 281 Method of Calculating Dynamic Load Rating and Rating Life of Rolling Bearings; International Organization for Standardization: Geneva, Switzerland, 2007. [Google Scholar]
- Chen, Z.; Zhai, W.; Wang, K. A locomotive–track coupled vertical dynamics model with gear transmissions. Veh. Syst. Dyn. 2016, 55, 244–267. [Google Scholar] [CrossRef]
- Chen, Z.; Zhai, W.; Wang, K. Dynamic investigation of a locomotive with effect of gear transmissions under tractive conditions. J. Sound Vib. 2017, 408, 220–233. [Google Scholar] [CrossRef]
- Weinzapfel, N.; Sadeghi, F. A Discrete Element Approach for Modeling Cage Flexibility in Ball Bearing Dynamics Simulations. J. Tribol. 2009, 131, 021102. [Google Scholar] [CrossRef]
- Liu, Y.; Chen, Z.; Tang, L.; Zhai, W. Skidding dynamic performance of rolling bearing with cage flexibility under accelerating conditions. Mech. Syst. Signal Process. 2021, 150, 107257. [Google Scholar] [CrossRef]
- Liu, J.; Xu, Y.; Pan, G. A combined acoustic and dynamic model of a defective ball bearing. J. Sound Vib. 2021, 501, 116029. [Google Scholar] [CrossRef]
- Liu, J.; Tang, C.; Wu, H.; Xu, Z.; Wang, L. An analytical calculation method of the load distribution and stiffness of an angular contact ball bearing. Mech. Mach. Theory 2019, 142, 103597. [Google Scholar] [CrossRef]
- Zhang, T.; Chen, Z.; Zhai, W.; Wang, K. Establishment and validation of a locomotive–track coupled spatial dynamics model considering dynamic effect of gear transmissions. Mech. Syst. Signal Process. 2019, 119, 328–345. [Google Scholar] [CrossRef]
- Chen, Z.; Zhou, Z.; Zhai, W.; Wang, K. Improved analytical calculation model of spur gear mesh excitations with tooth profile deviations. Mech. Mach. Theory 2020, 149, 103838. [Google Scholar] [CrossRef]
- Chen, Z.; Ning, J.; Wang, K.; Zhai, W. An improved dynamic model of spur gear transmission considering coupling effect between gear neighboring teeth. Nonlinear Dyn. 2021. [Google Scholar] [CrossRef]
- Bernal, E.; Spiryagin, M.; Cole, C. Wheel flat detectability for Y25 railway freight wagon using vehicle component acceleration signals. Veh. Syst. Dyn. 2019, 58, 1893–1913. [Google Scholar] [CrossRef]
- Xu, L.; Zhai, W. Train–track coupled dynamics analysis: System spatial variation on geometry, physics and mechanics. Railw. Eng. Sci. 2020, 28, 36–53. [Google Scholar] [CrossRef] [Green Version]
- Ge, X.; Ling, L.; Yuan, X.; Wang, K. Effect of distributed support of rail pad on vertical vehicle-track interactions. Constr. Build. Mater. 2020, 262, 120607. [Google Scholar] [CrossRef]
- Miner, M. Cumulative Damage in Fatigue. J. Appl. Mech. 1945, 3, 159–164. [Google Scholar] [CrossRef]
- Liu, D.; Li, Q.; Hu, W.; Pan, W. Fatigue life prediction of the axle box bearings for high-speed trains. DYNA 2017, 92, 538–544. [Google Scholar] [CrossRef] [Green Version]
- Zhai, W. Two simple fast integration methods for large-scale dynamic problems in engineering. Int. J. Numer. Methods Eng. 1996, 39, 4199–4214. [Google Scholar] [CrossRef]
- Dormand, J.R.; Prince, P.J. A family of embedded Runge-Kutta formulae. J. Comput. Appl. Math. 1980, 6, 19–26. [Google Scholar] [CrossRef] [Green Version]
- Ministry of Railways of the People’s Republic of China. Railway Passenger Car Service and Maintenance Regulations; China Railway Publishing House: Beijing, China, 2006. [Google Scholar]




Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, B.; Luo, Z.; Zhang, B.; Liu, Y.; Chen, Z. Dynamic Influence of Wheel Flat on Fatigue Life of the Traction Motor Bearing in Vibration Environment of a Locomotive. Energies 2021, 14, 5810. https://doi.org/10.3390/en14185810
Guo B, Luo Z, Zhang B, Liu Y, Chen Z. Dynamic Influence of Wheel Flat on Fatigue Life of the Traction Motor Bearing in Vibration Environment of a Locomotive. Energies. 2021; 14(18):5810. https://doi.org/10.3390/en14185810
Chicago/Turabian StyleGuo, Bingbin, Zhixiang Luo, Bo Zhang, Yuqing Liu, and Zaigang Chen. 2021. "Dynamic Influence of Wheel Flat on Fatigue Life of the Traction Motor Bearing in Vibration Environment of a Locomotive" Energies 14, no. 18: 5810. https://doi.org/10.3390/en14185810
APA StyleGuo, B., Luo, Z., Zhang, B., Liu, Y., & Chen, Z. (2021). Dynamic Influence of Wheel Flat on Fatigue Life of the Traction Motor Bearing in Vibration Environment of a Locomotive. Energies, 14(18), 5810. https://doi.org/10.3390/en14185810