1. Introduction
Conventional power systems are undergoing a profound transition led by emerging DC technologies. The far-reaching changes started from the power transmission section, where high-voltage DC (HVDC) systems have been implemented to transmit electric energy over a long distance, and now reach the medium- and low-voltage power distribution levels. Compared with AC grids, DC distribution grids have multiple advantages in terms of efficiency, flexibility and capacity in the integration of distributed renewable energies, energy storage systems and power electronic devices [
1,
2].
However, short-circuit faults are still a major threat to the safety of multi-terminal DC (MTDC) distribution grids. Because of the low-impedance nature of DC systems, the ensuing fault currents in DC distribution grids increase at high rates, which can damage vulnerable power electronic devices in a few milliseconds [
3]. Besides, the multiple power sources and capacitive components in MTDC distribution grids get simultaneously discharged by faults, leading to significant impacts in a large area. To avoid the irreversible damages to the system, it is critical to clear the faults in MTDC distribution grids in the early phase.
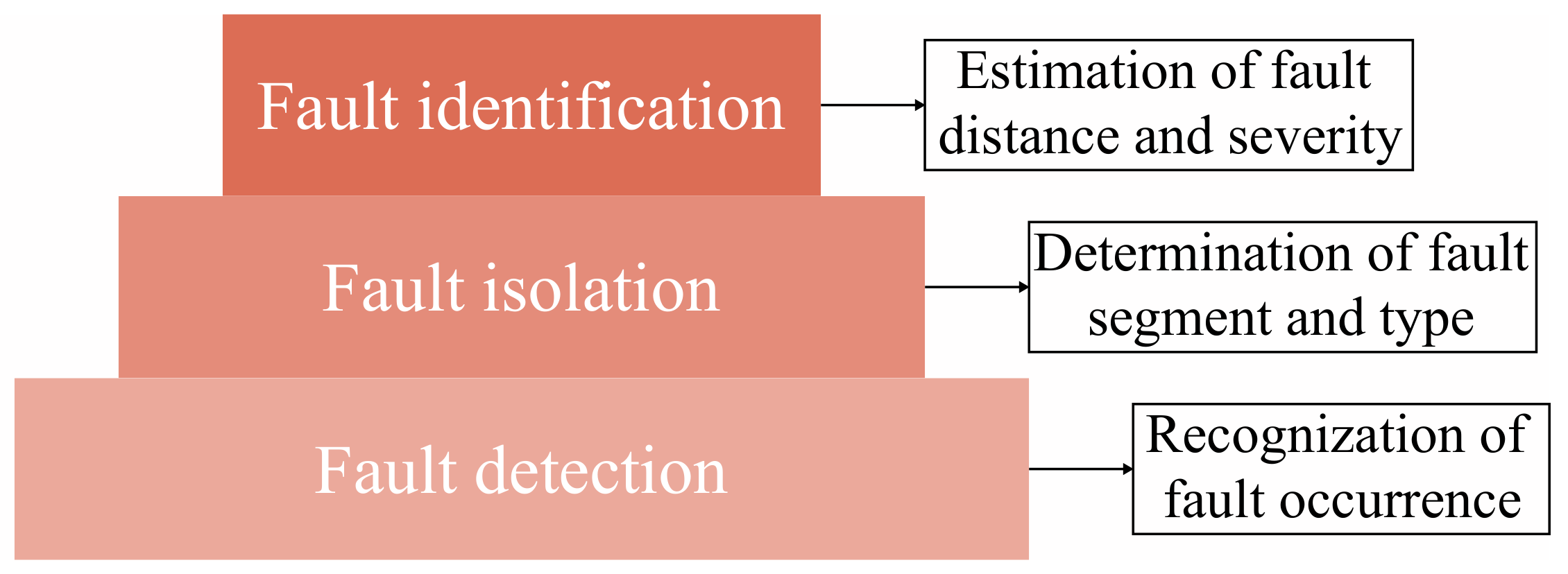
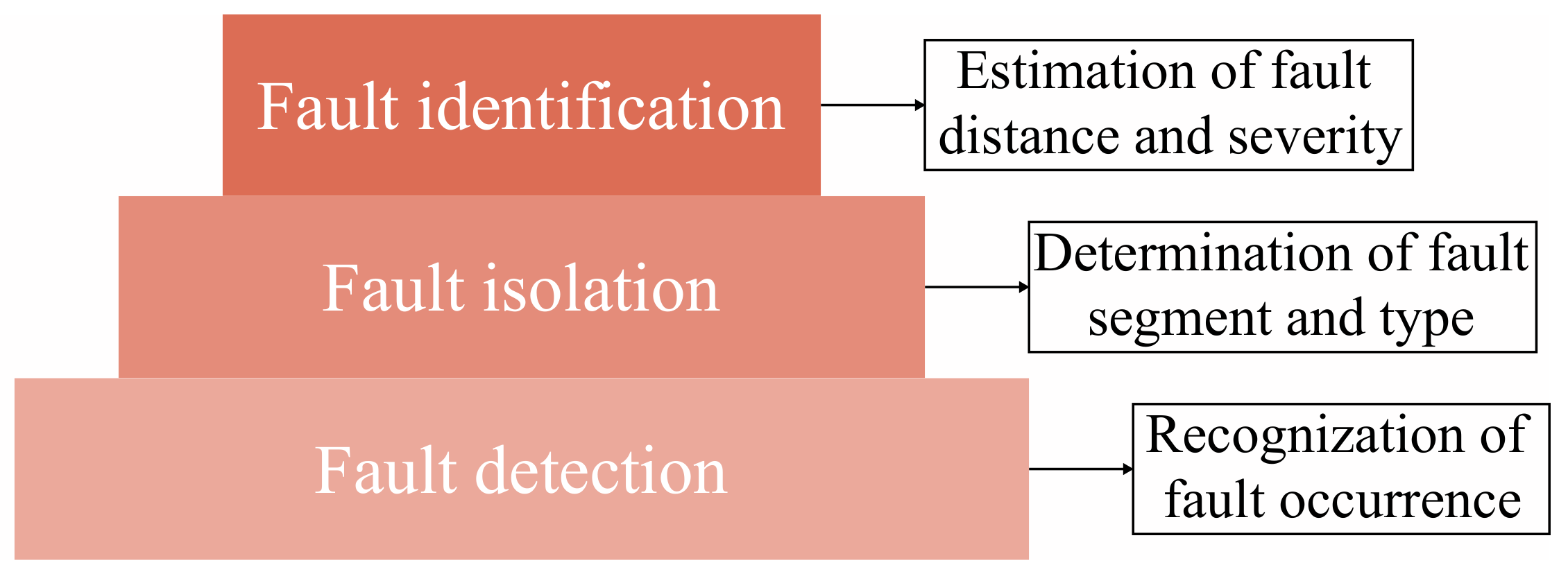
As shown in
Figure 1, the fault diagnosis in MTDC distribution grids includes three different levels [
4]: fault detection, isolation and identification. Among the three levels, fault detection and isolation are the precondition to achieve selective fault clearance in MTDC distribution grids. Based on the output of fault isolation, fault identification is performed on the recognized fault segments to further obtain quantified fault information. Fault identification is of great importance for the maintenance and service restoration of MTDC distribution grids, which is the focus of this paper. Owning to the need for fast fault clearance in MTDC distribution grids, limited time and data are available for online fault identification, which form the major challenges to existing techniques. The existing online fault identification methods in MTDC distribution grids can be categorized into signal-based, data-based and model-based methods, which are reviewed in the following.
The signal-based methods rely on the processing of real-time measurement signals. There are traveling waves, which can be classified into single-ended type [
5] and double-ended type [
6]. To improve the accuracy in measuring the time delay of traveling waves, time-frequency analysis techniques, such as wavelet transform [
7], have also been used. The traveling wave-based methods are primarily applied to the systems with long transmission distance. However, MTDC distribution grids are in general small-scale networks with short feeder lines. In such systems, the time delays of traveling waves are difficult to measure. Besides, fault location is also achieved through estimating line impedance. An impedance estimation-based fault identification method is introduced in [
8]. Yet this method has been tested only in a passive radial DC grid, whereas the impedance of MTDC distribution grids is still difficult to measure. Dedicated power hardware and devices have also been used to aid the fault identification in DC grids [
9,
10,
11]. The active impedance estimation method [
9] measures the bus impedance in high-frequency domain using additional power converters.Ref. [
10] introduces a fault location module composed of switches and inductors. Ref. [
11] injects signals into isolated faulty lines with specialized solid-state circuit breakers. However, due to the needs for additional hardware, these methods are not optimal solutions from the view point of cost and reliability.
The data-based methods achieve fault identification based on the correlation between real-time measurement data and historical data. In this field, supervised machine learning methods have gained more and more attentions. For example, ref. [
12] trains artificial neural networks to locate faults in DC microgrids, ref. [
13] implements a fault location function in photovoltaic farms with artificial neural networks and wavelet transform, ref. [
14] introduces the support vector machine for fault classification and identification in DC lines. In [
15], pre-simulated fault data are used as the training samples to train a machine learning model for fault location. The general problem of these supervised machine learning methods is that their performances are highly dependent on the availability of labeled training data, especially fault data, which are difficult to acquire and only sparsely available in real-world power systems. As for those models trained with simulation data, their effectiveness in realistic fault conditions is not verified.
Moreover, the dynamic models of DC cables have been used for fault identification in DC distribution grids. Based on this concept, different methods have been proposed. For example, ref. [
16] estimates the fault distance and location in DC microgrids using the signals measured during fault transients. Yet this method uses the derivatives of line currents, whose accuracy is highly susceptible to noises and sampling errors. Ref. [
17] develops a non-iterative algorithm to estimate the fault distance based on the discrete equations of differential currents. However, the computational costs of this method increase with the length of cable. Ref. [
18] provides a parameter estimation approach to estimate both fault location and resistance. Yet the accuracy and speed of this local measurement-based method are still to improve. Ref. [
19] introduces a genetic algorithm-based fault location method in DC distribution grids. However, the estimation of fault severity is not covered. Ref. [
20] establishes a
R-
L model of DC lines for fault location. However, the requirement of preset short-circuit faults contribute to the difficulty in the implementation of this method. Ref. [
21] estimates fault distance based on a voltage divider in DC lines, which contributes to installation costs.
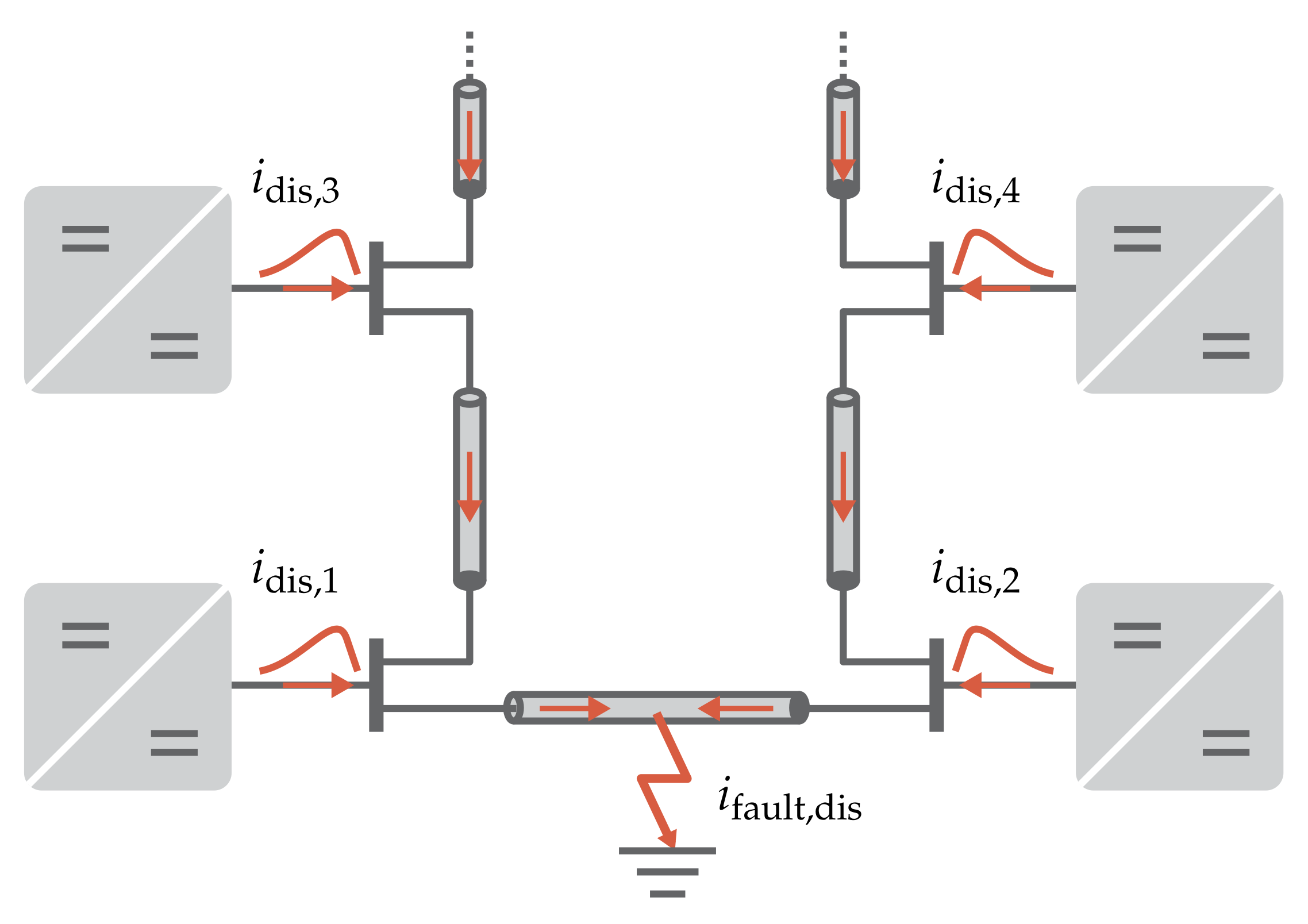
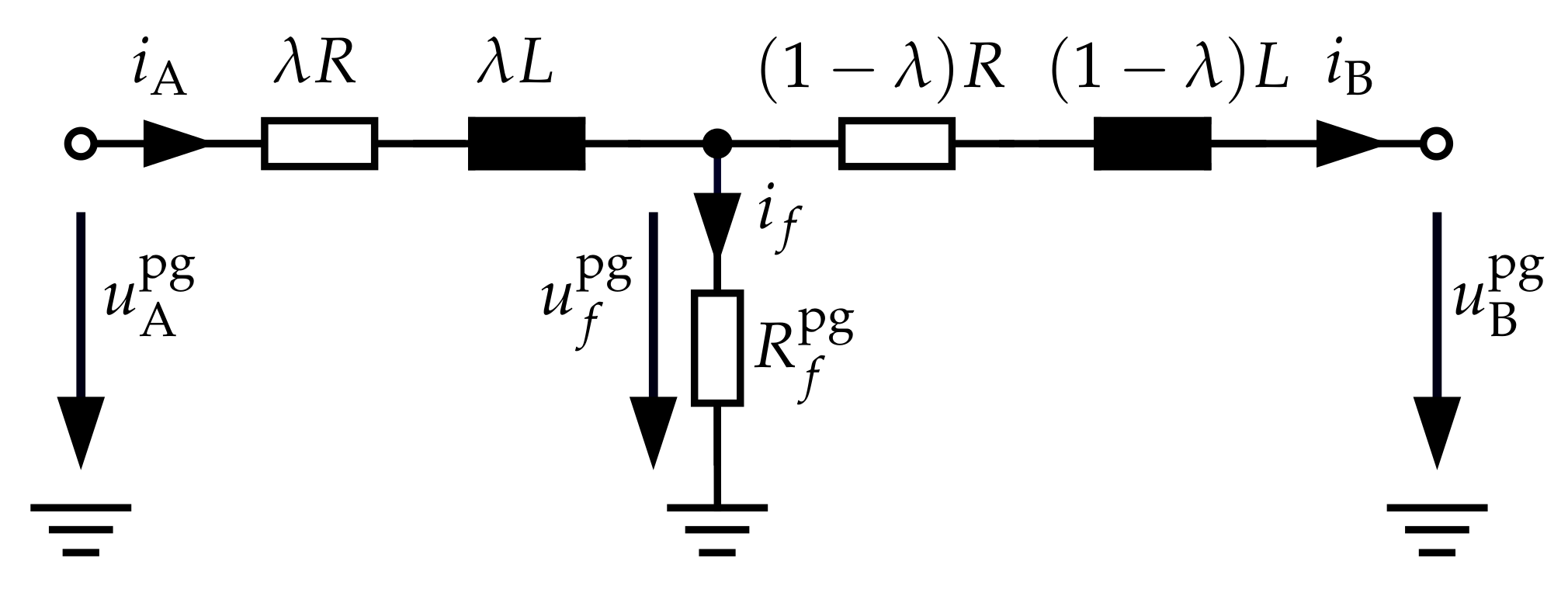
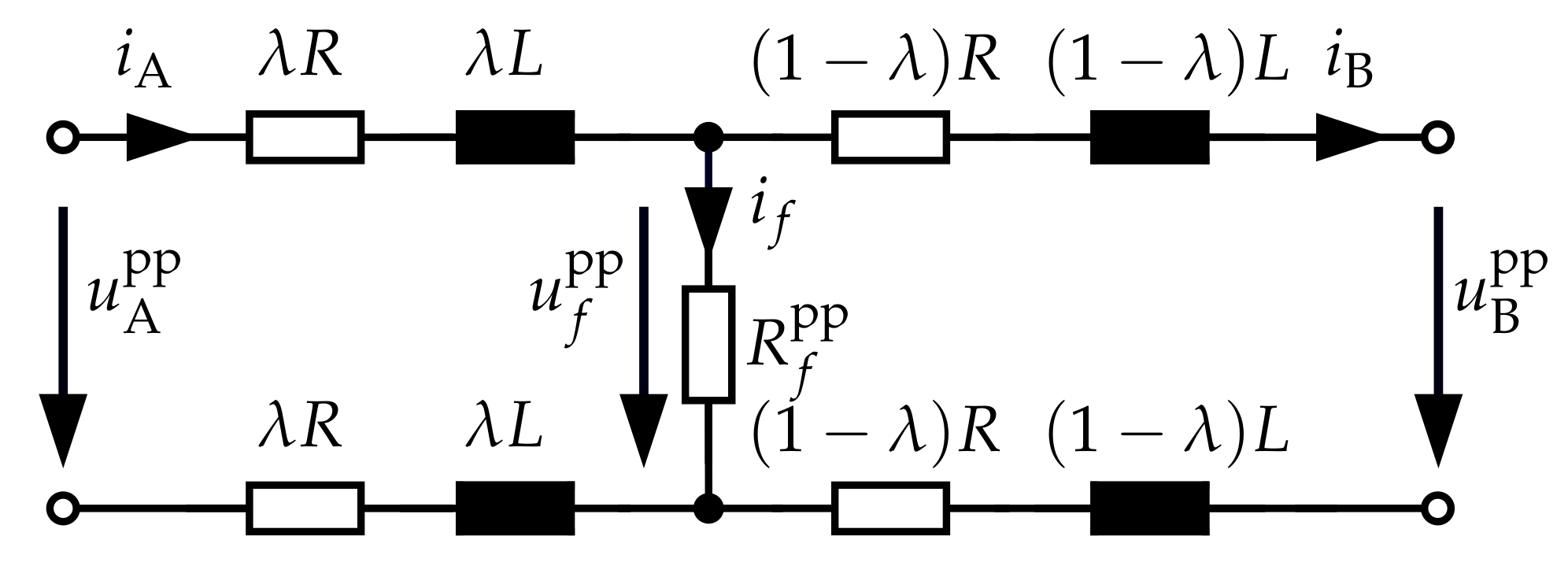
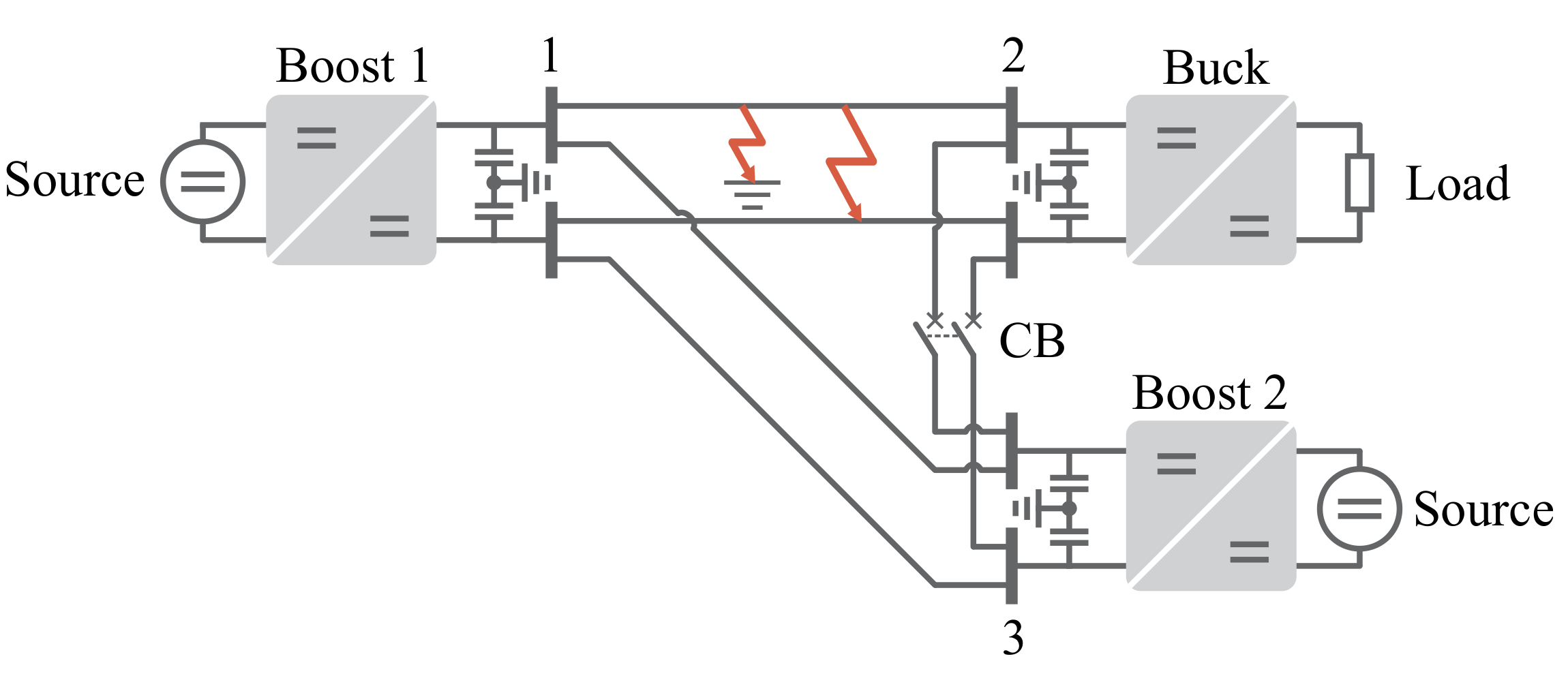
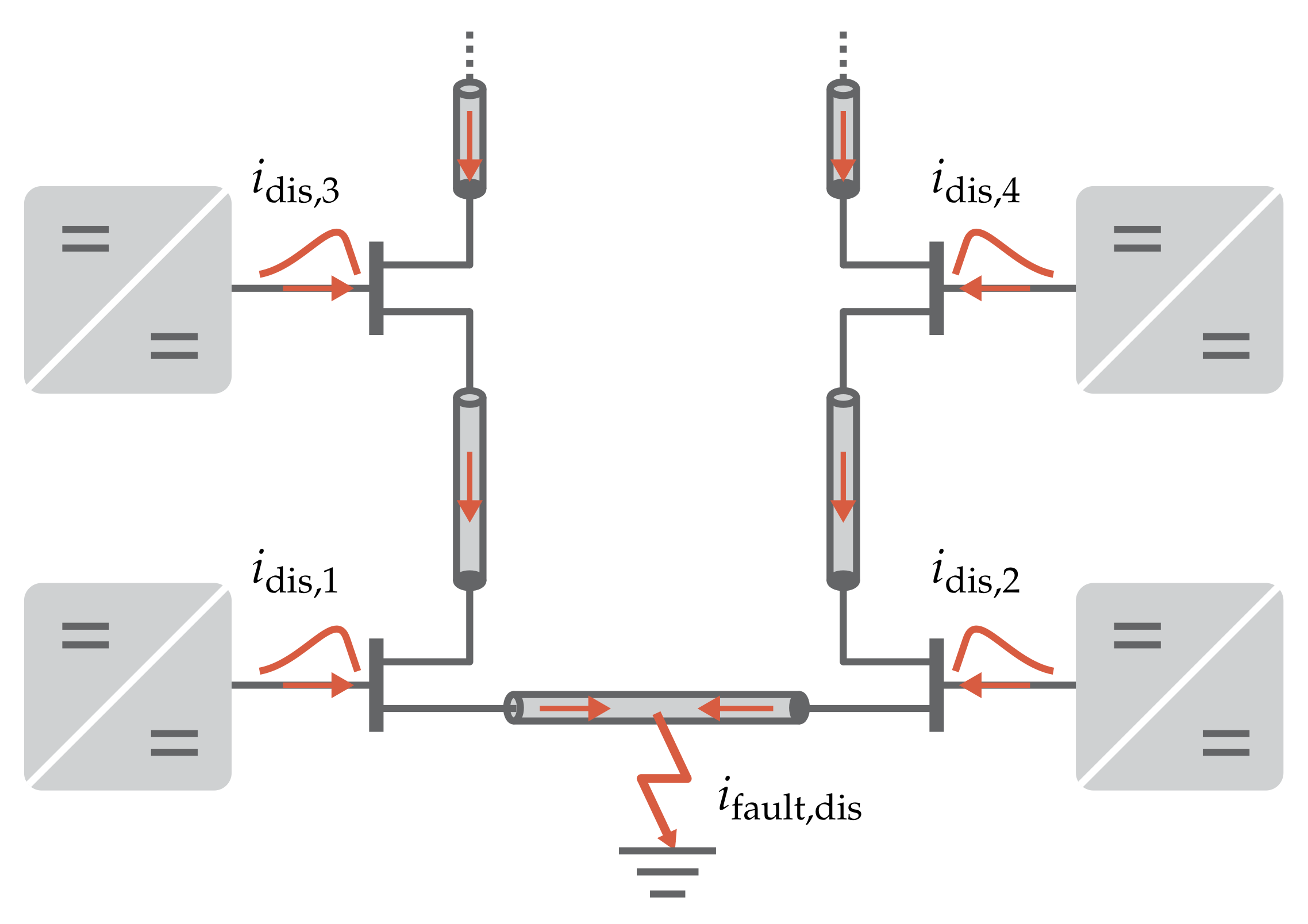
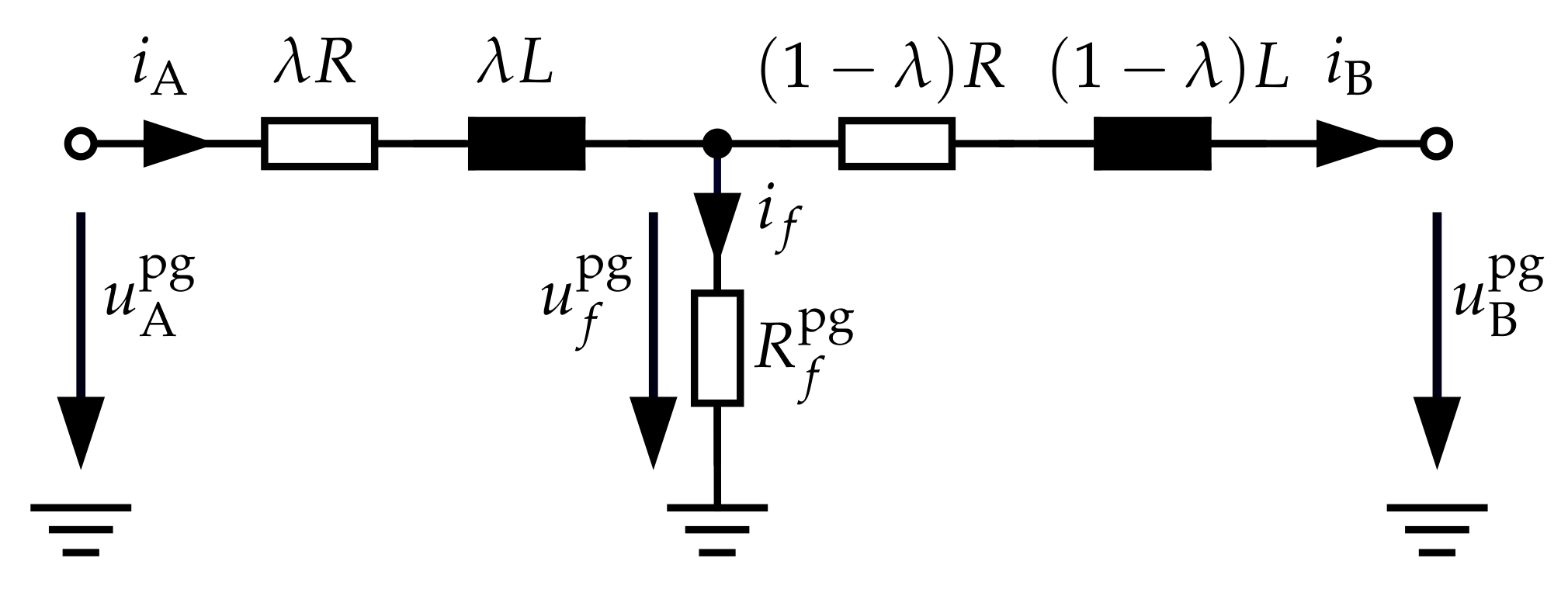
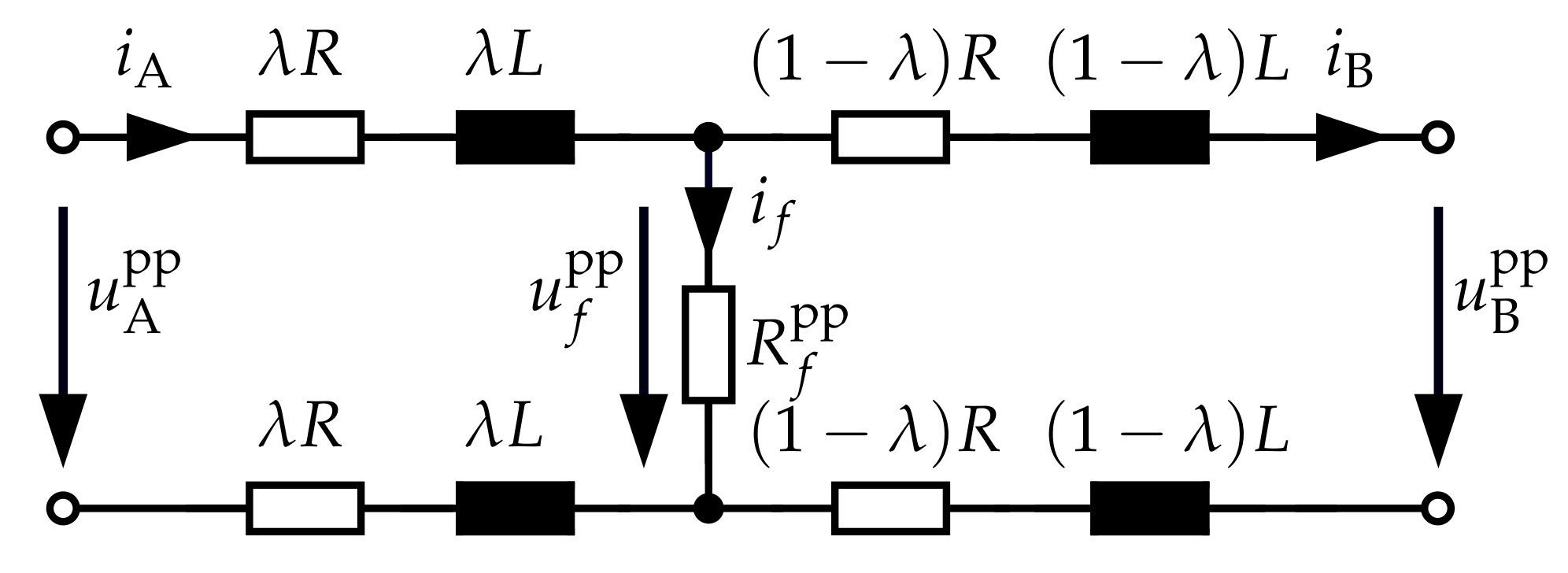
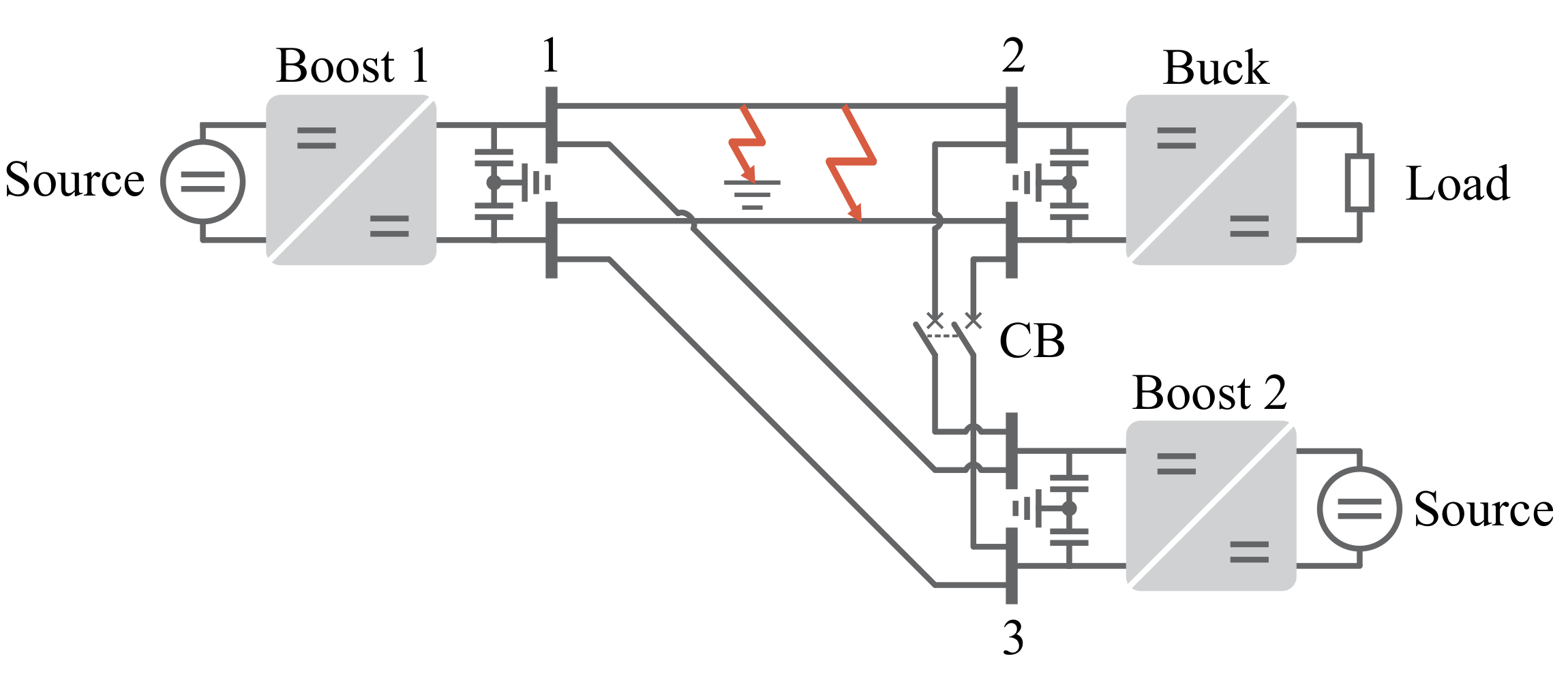
Beside the reviewed deficiencies of conventional online fault identification methods, most of the methods cover only the fault conditions with single-end current injection. Yet the protection of MTDC distribution grids, in which fault currents are contributed by multiple power sources, entails a fault identification method that is applicable to both single- and double-end fault current injection modes. To fill this gap, an online fault identification method is introduced in this work, which makes use of the available communication infrastructure and measurement sensors in MTDC distribution grids. First, a generic model of DC cables with pole-to-ground (PG) or pole-to-pole (PP) faults is developed. On this basis, a Kalman filter is established to reconstruct the fault distance and resistance with single- and double-end current injection. Through the real-time simulation of various PG and PP fault scenarios in a three-terminal DC distribution grid, the accuracy and speed of the proposed online fault identification method are verified. Compared with the existing online fault identification methods, the advantageous features of the proposed method include:
- (1)
The proposed fault identification method can cover both PG and PP faults in DC lines with single- or double-ended fault current injection, which has improved applicability in the protection of MTDC distribution grids.
- (2)
Unlike those fault location methods that only estimate the fault distance, the proposed fault identification method also provides the estimated value of the fault resistance, with which the fault severity can be determined.
- (3)
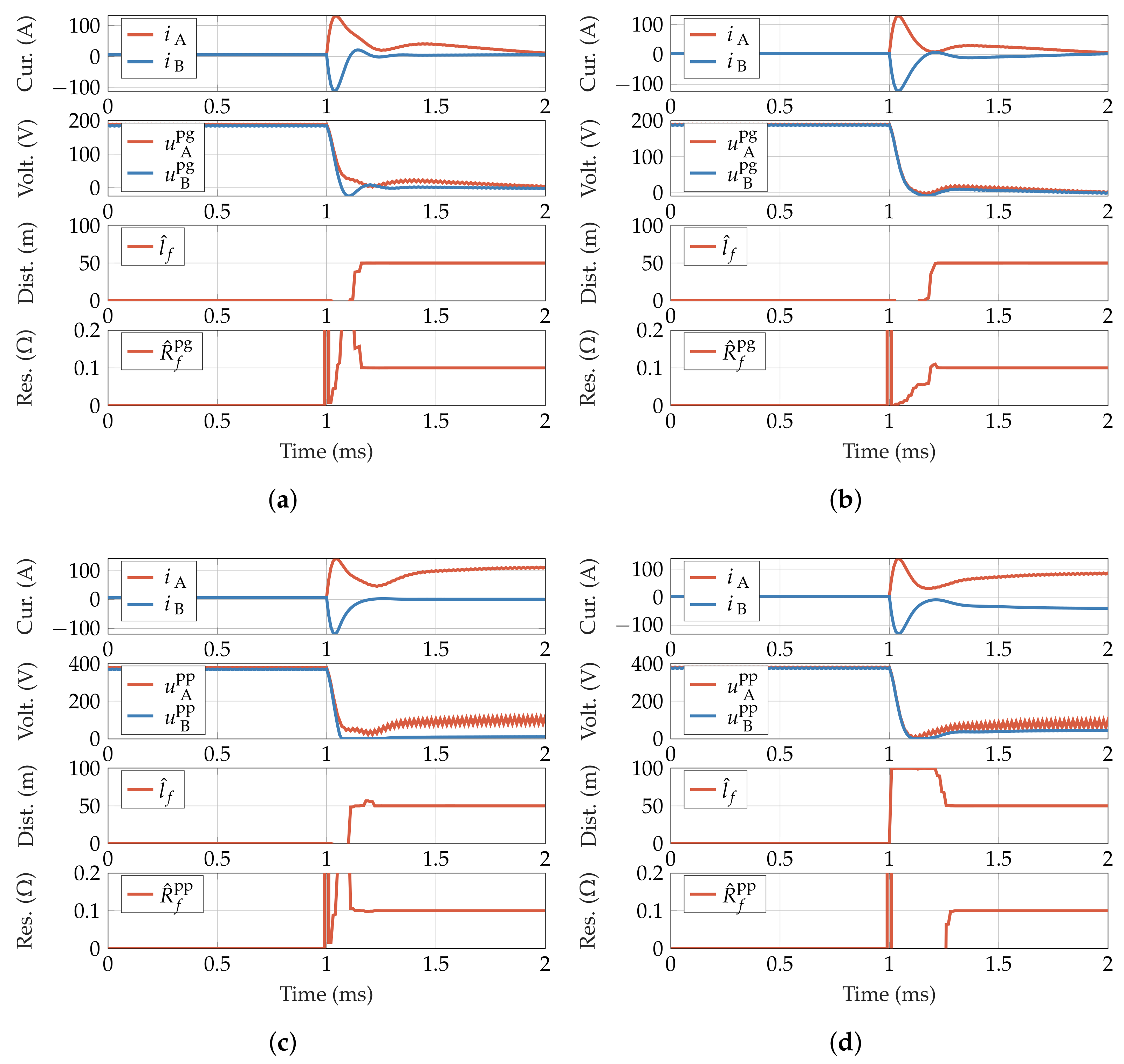
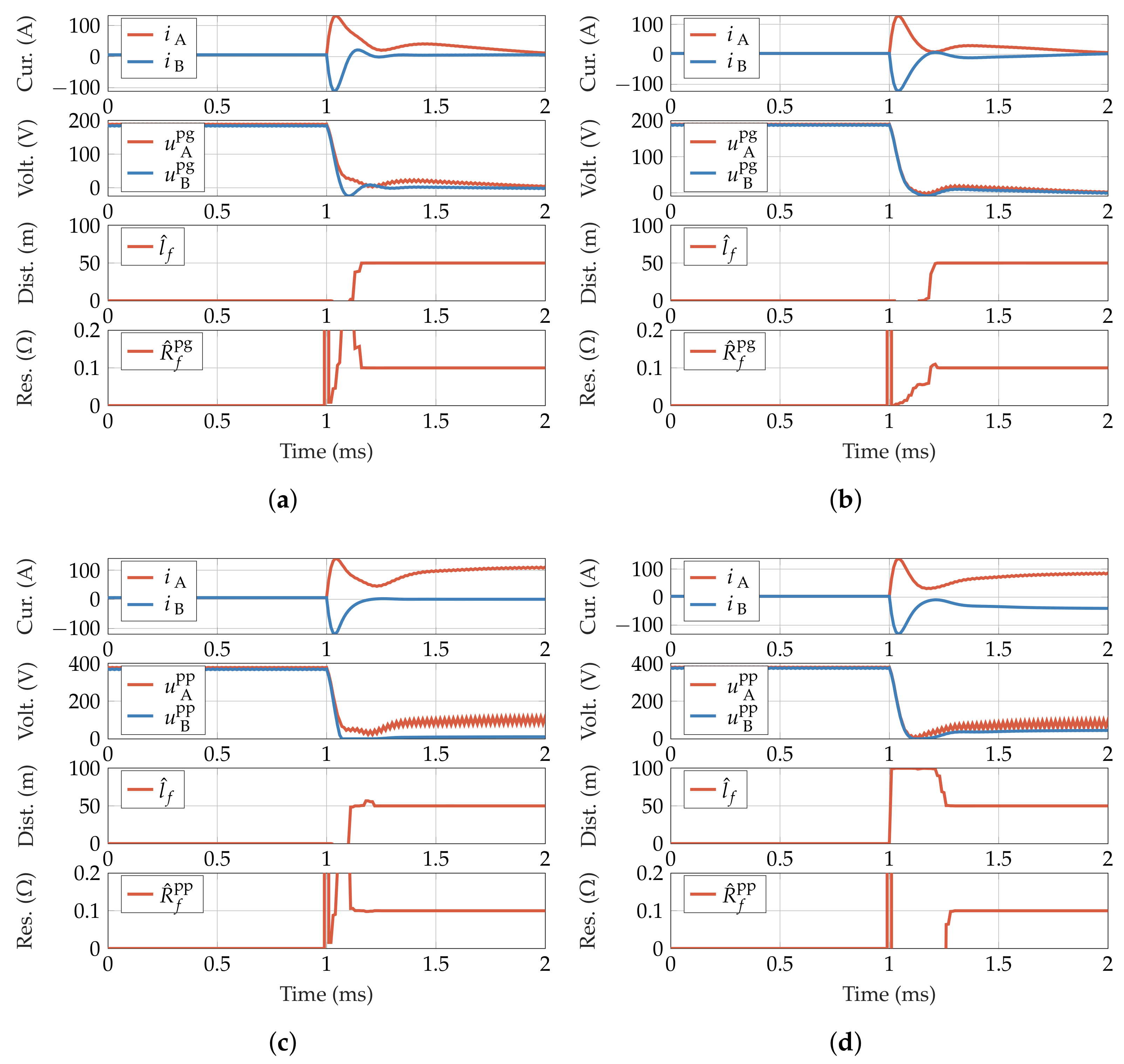
Using the Kalman filter-based parameter estimation algorithm, the proposed method can achieve fast fault identification with a short response time of less than 1 ms. Its speed and effectiveness in different fault scenarios were verified through real-time simulation.
The remainder of this paper is structured in this way:
Section 2 discusses the major challenges to online fault identification in MTDC distribution grids.
Section 3 develops the mathematical models of the DC lines with PG and PP faults.
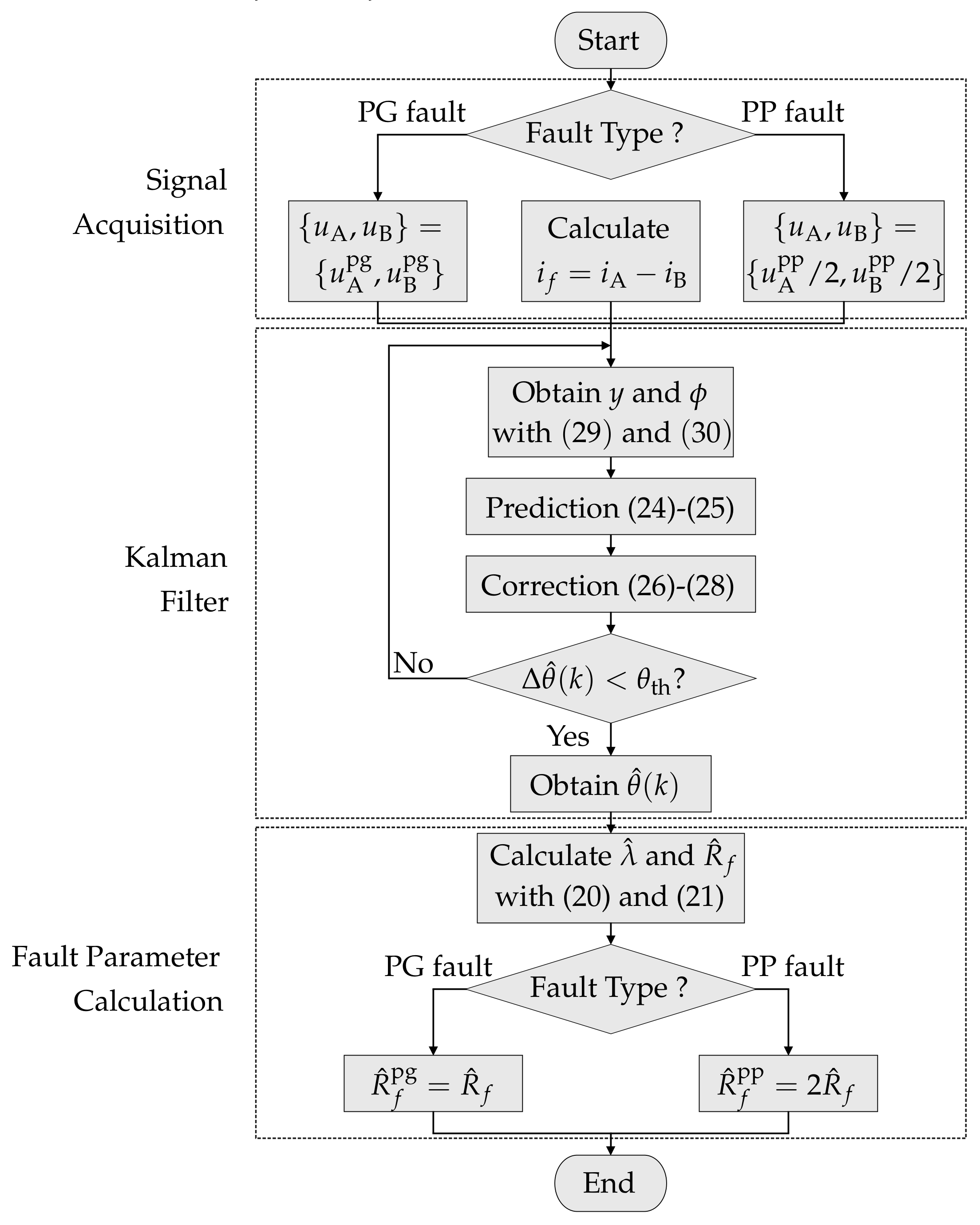
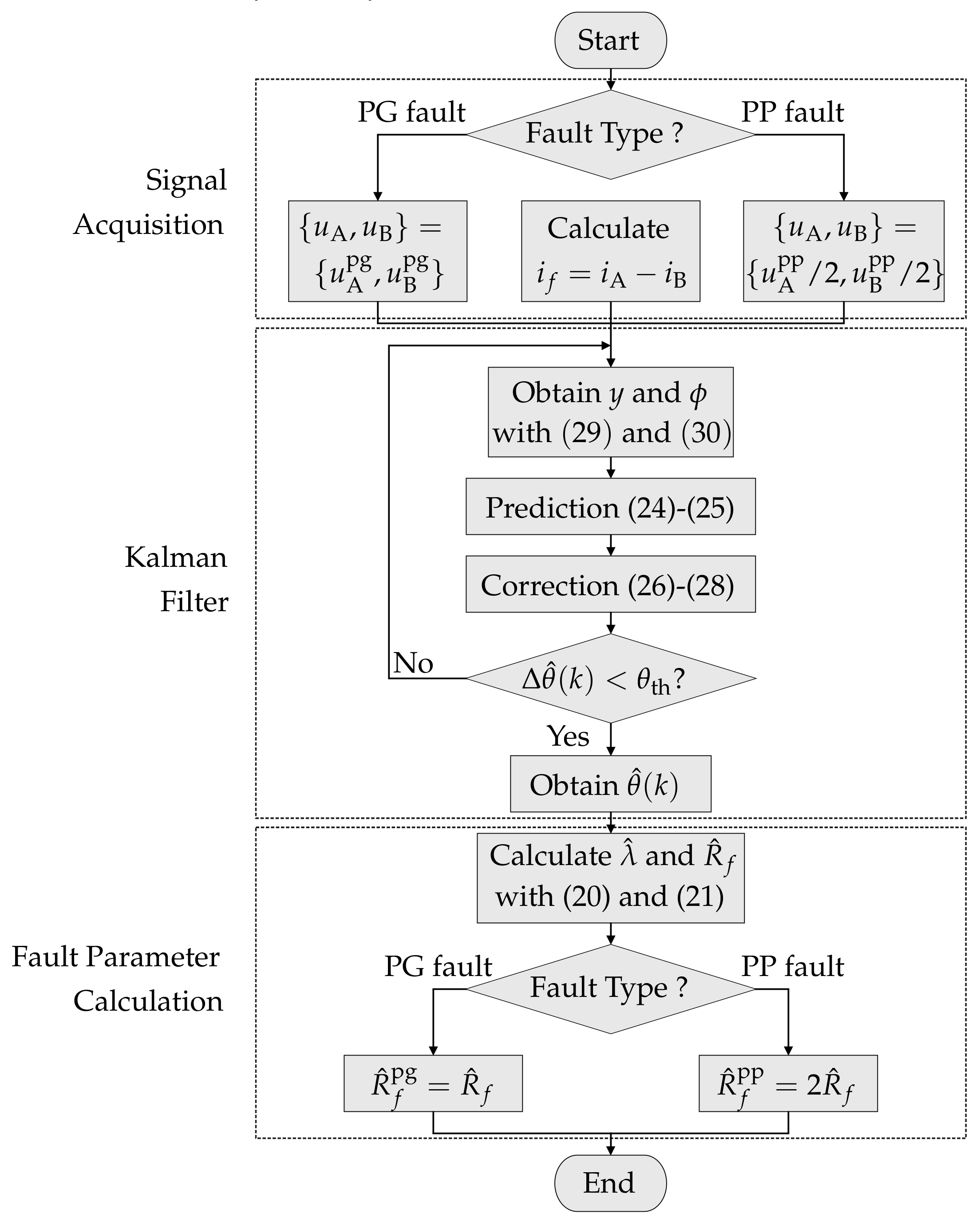
Section 4 introduces the parameter estimation algorithm and presents the complete procedures of the proposed online fault identification approach.
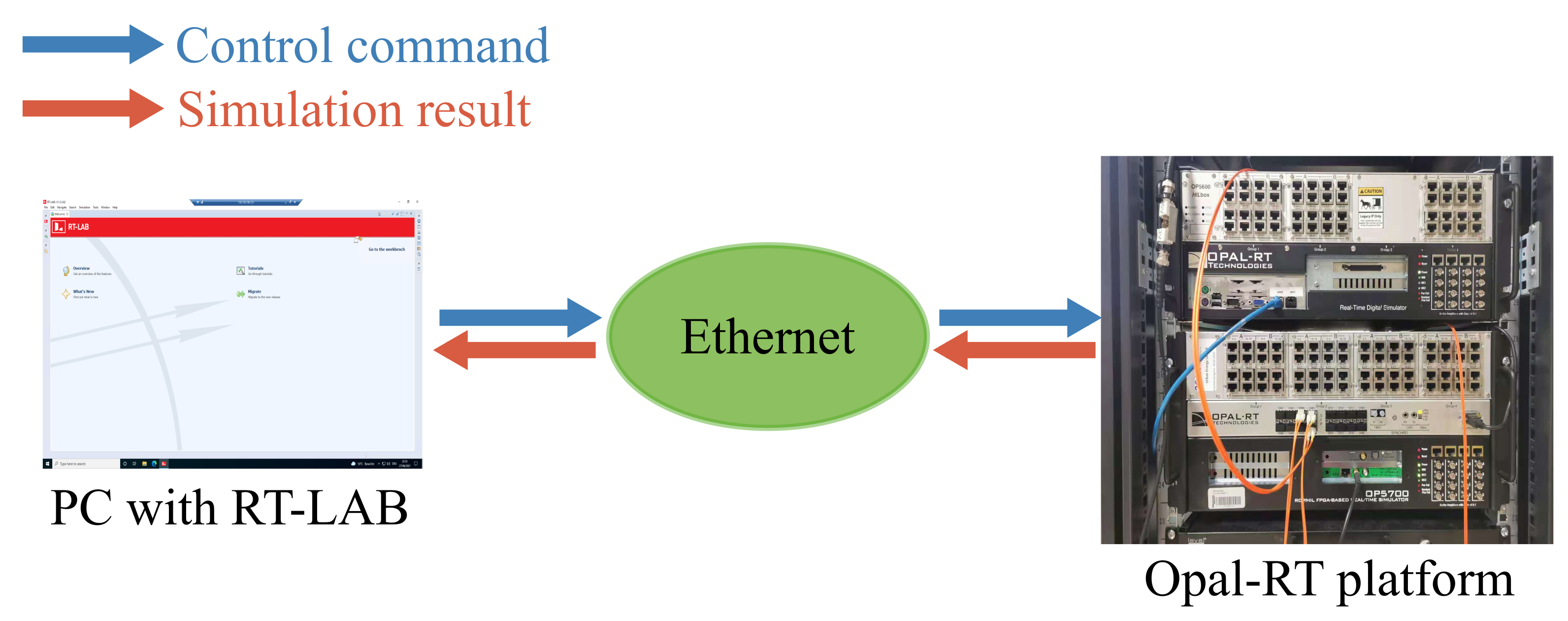
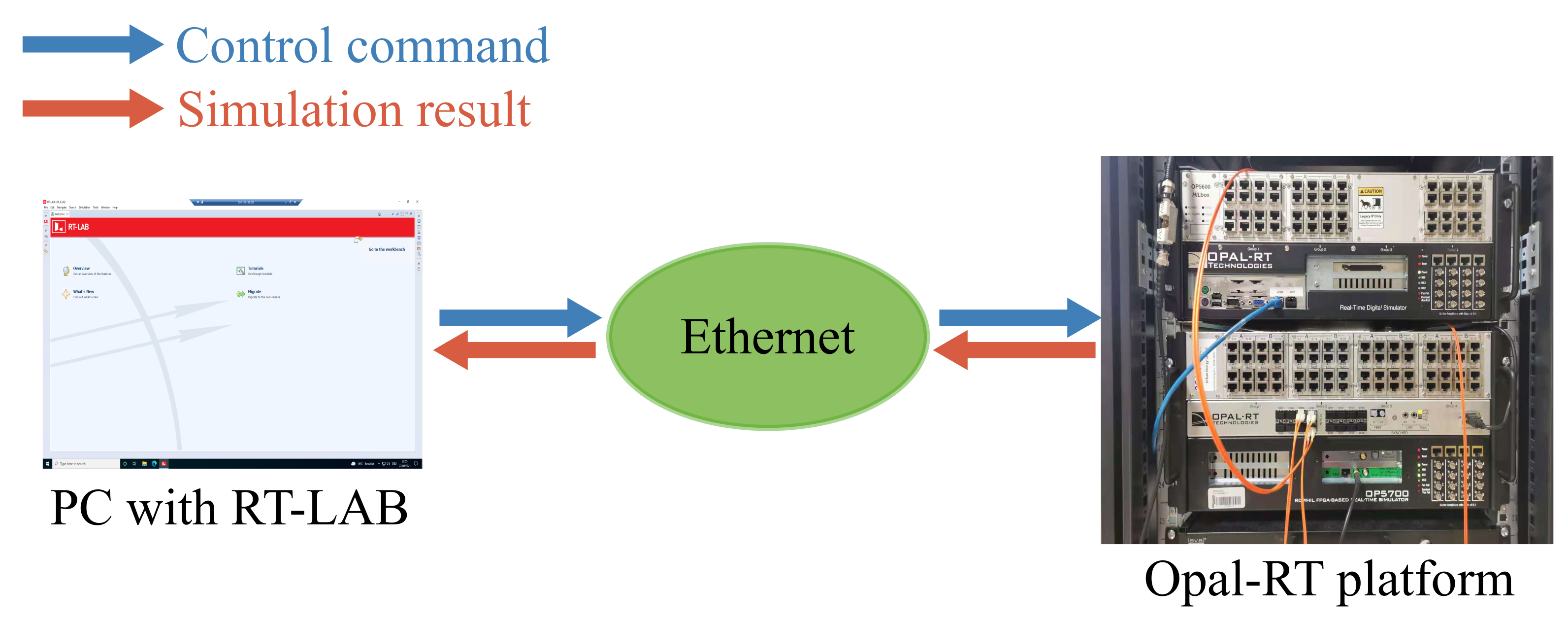
Section 5 verifies the performance of this fault identification method through real-time simulation.
Section 6 concludes the paper.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}