
Simulation of Optimal Driving for Minimization of Fuel Consumption or NOx Emissions in a Diesel Vehicle


 ,
,  ,
,  ,
, 

Abstract
:1. Introduction
2. Materials and Methods
2.1. Vehicle
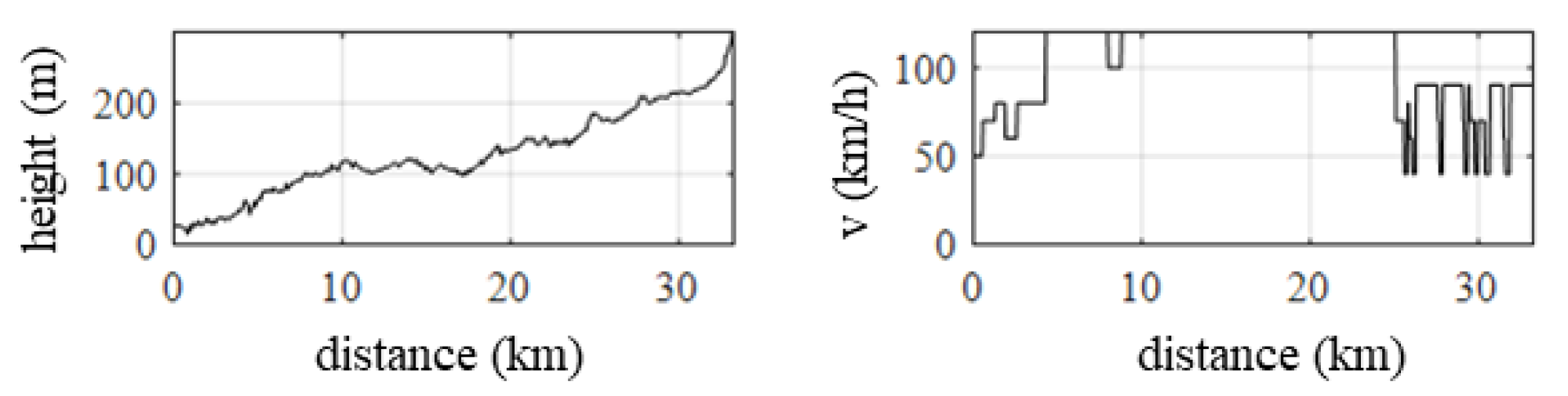
2.2. Route (Height and Speed Limits)
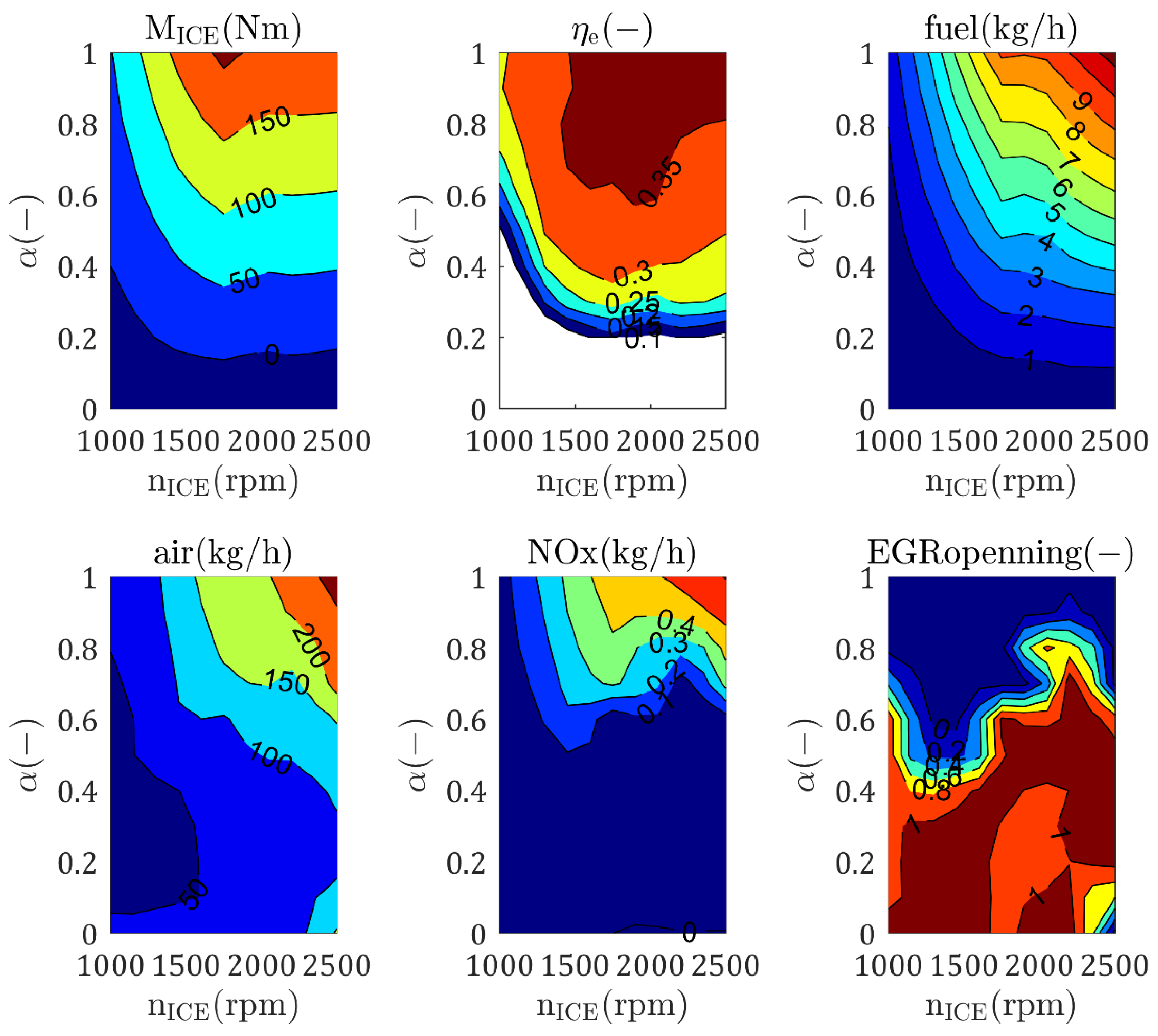
2.3. Engine Mapping
2.4. Vehicle Modeling
2.5. Optimization Problem
3. Results
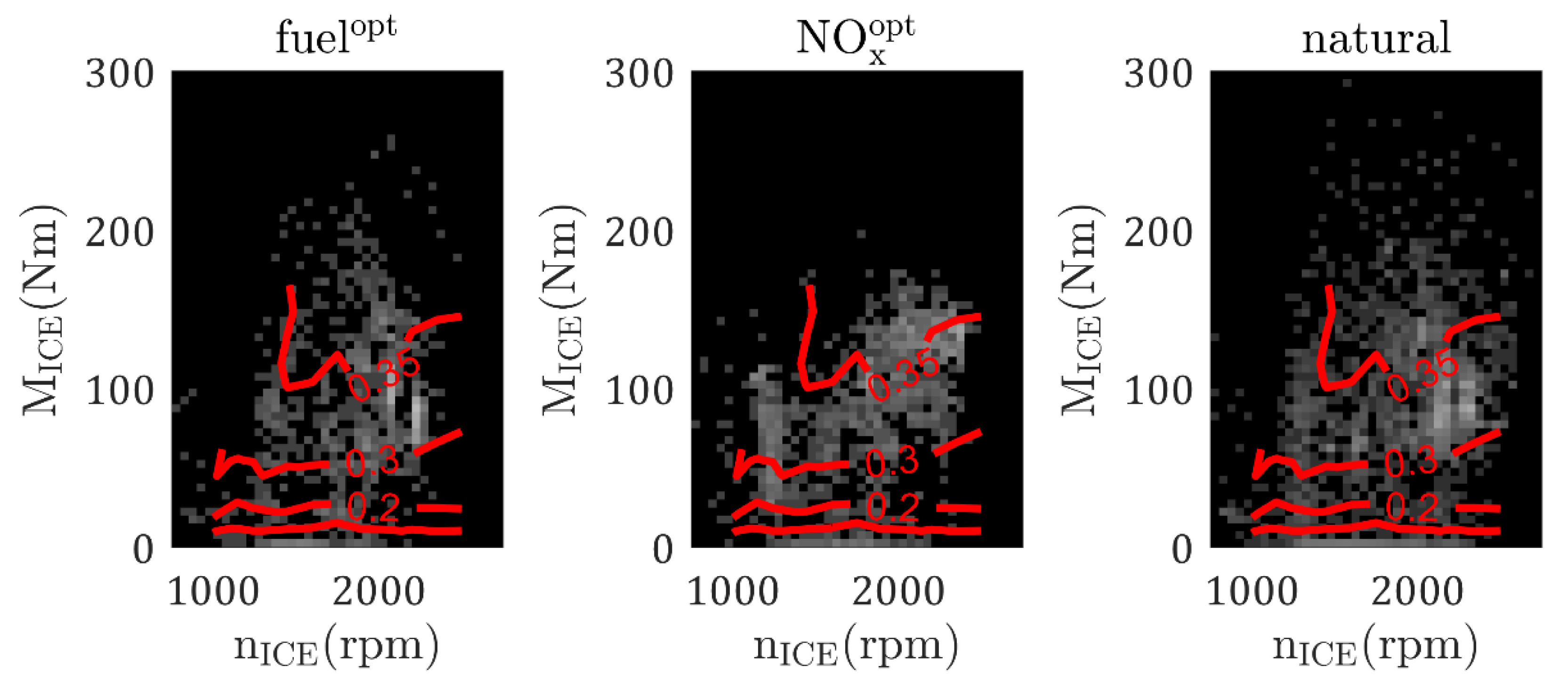
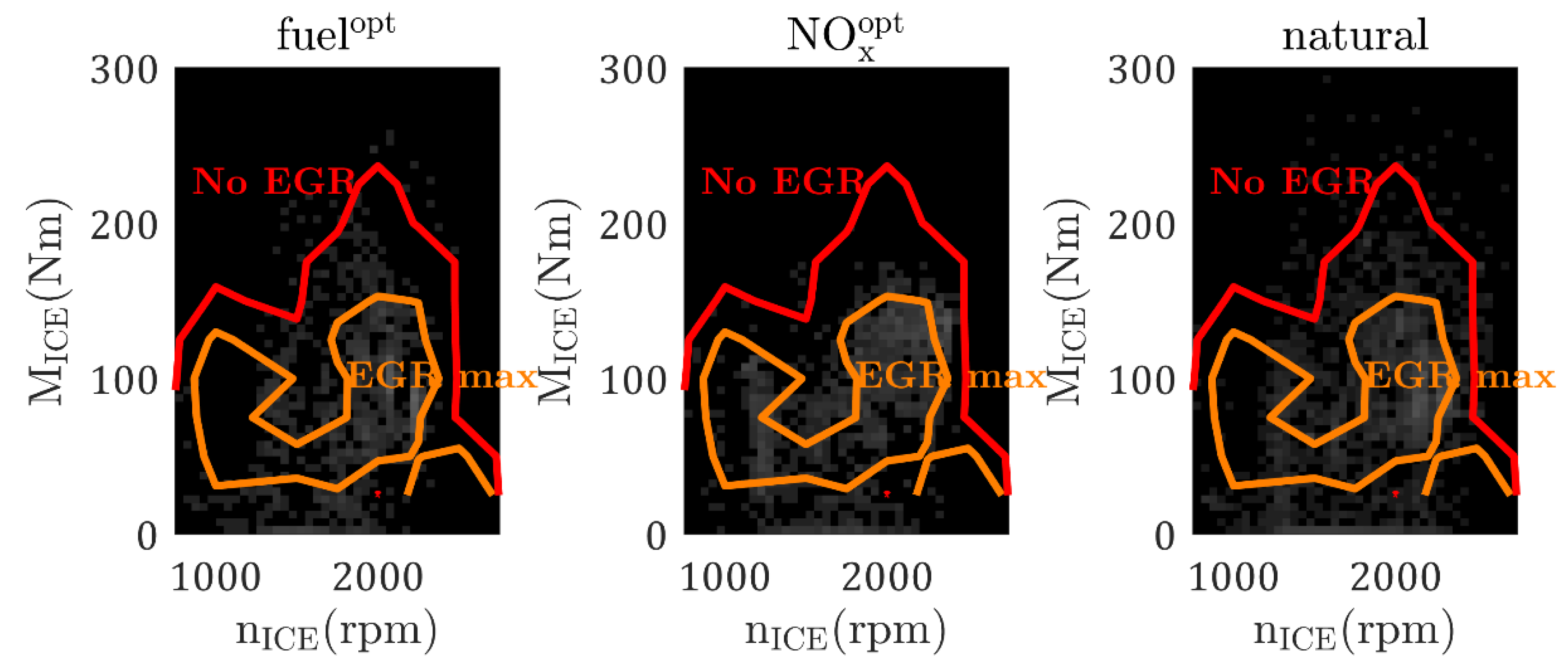
3.1. Engine Maps
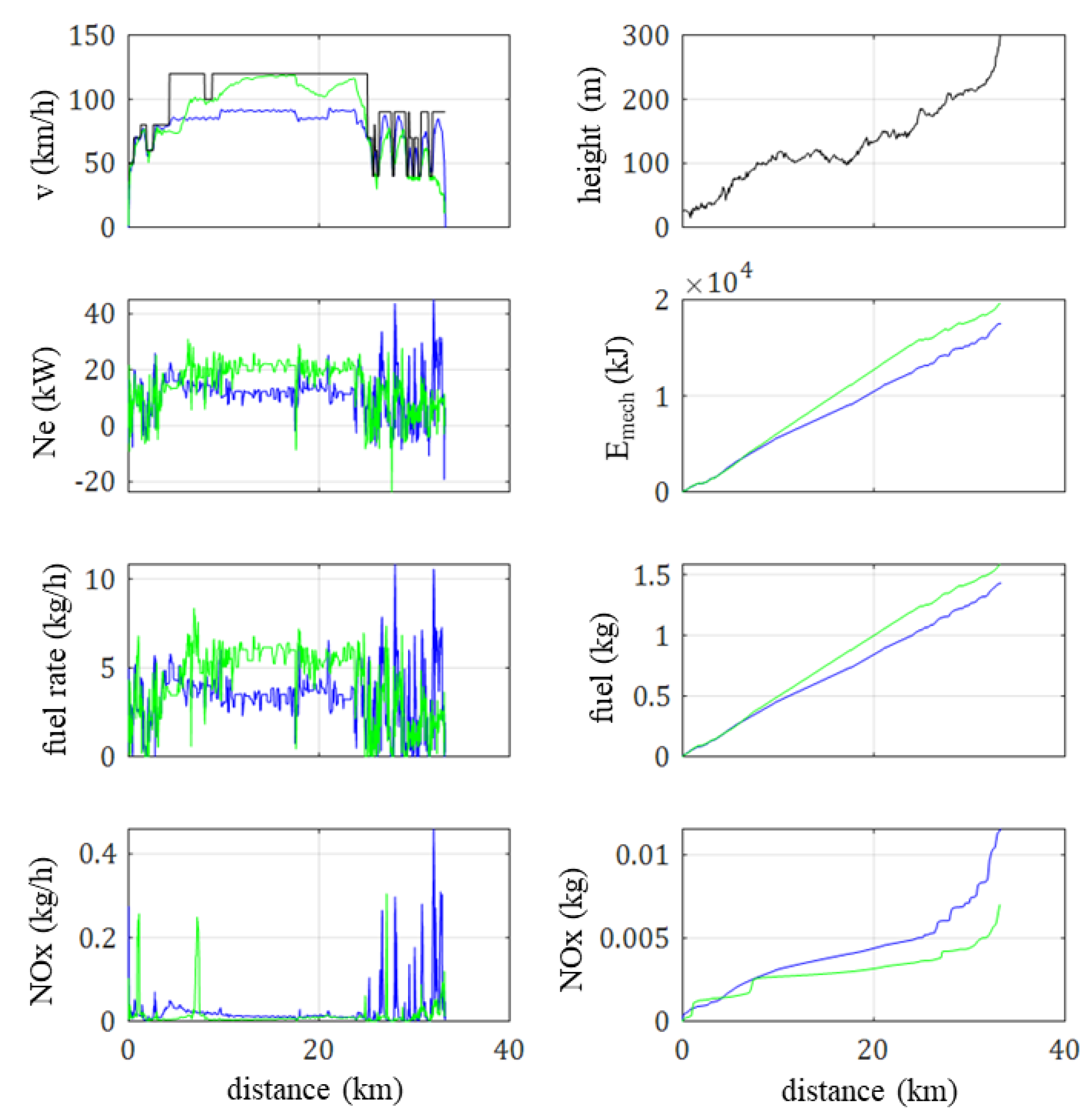
3.2. Optimal Driving Profile and Deviations for the Implemented Optimal Speed Profile
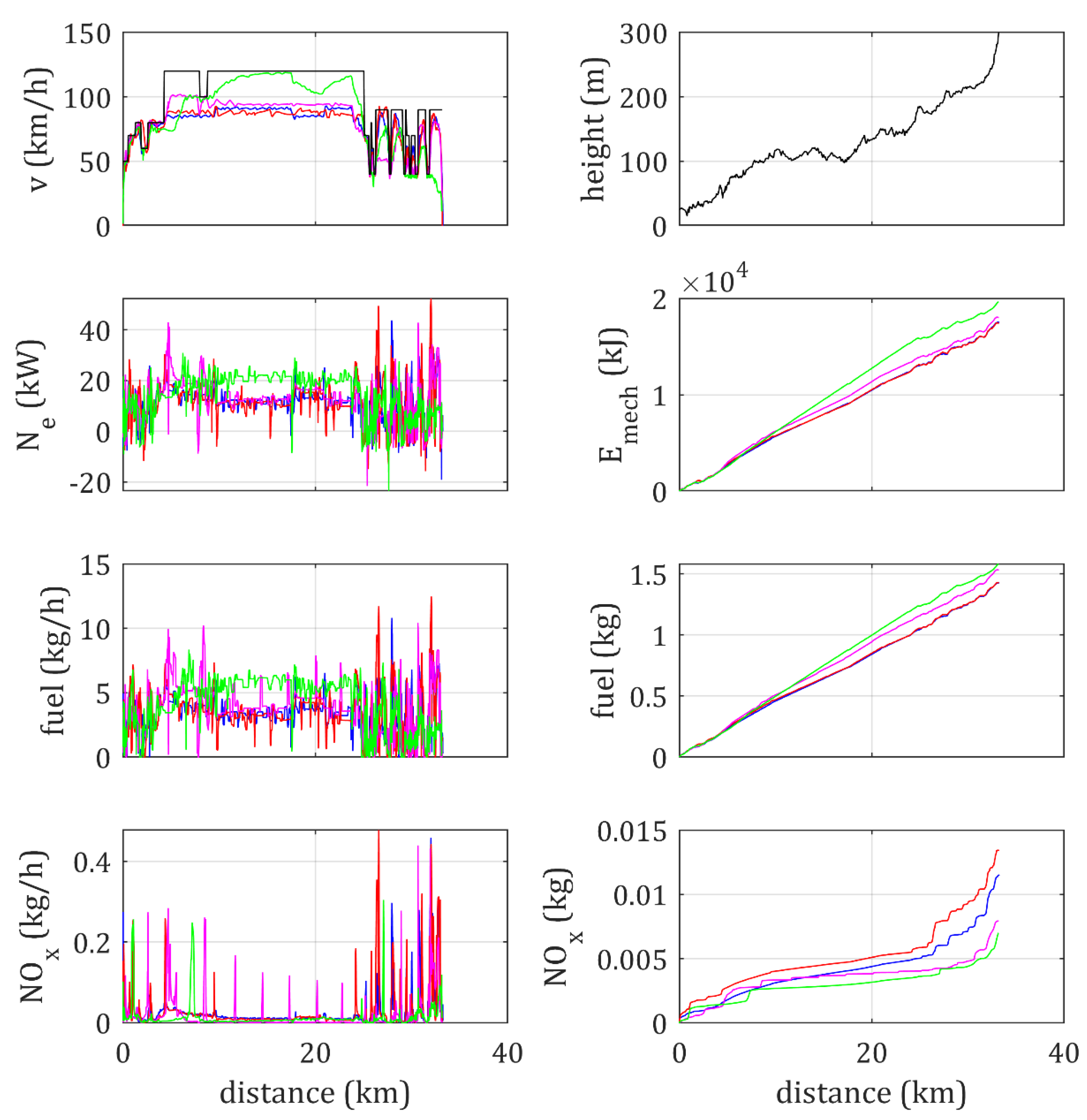
3.3. Optimal Driving for Reduction in Fuel Consumption and NOx
4. Conclusions
- The results show high potential for advanced driver-assistance systems in fuel consumption and especially in emissions reduction. In this sense, there is a substantial potential of fuel consumption and emission reduction in adapting the speed profile to the driving conditions (road slope, speed limits, time constraints or traffic).
- The common approach of optimal driving for fuel economy it is not the optimal for NOx pollutant emissions. NOx should be considered when optimizing fuel consumption.
- The fuel optimal driving profile obtained a 4% reduction in fuel consumption with respect to the NOx reduction driving profile.
- Most of the fuel saving potential is obtained by means of the mechanical energy minimization, so even without information on the engine, substantial fuel savings can be obtained by speed profile optimization.
- Natural and smooth driving, i.e., keeping vehicle speed as constant as possible approaches the minimum fuel consumption profile while more complex speed profiles are required for reducing NOx emissions.
- The NOx reduction driving profile was found to reduce 34.5% NOx emissions compared to the driving profile for minimum fuel consumption. In this sense, considering emission criteria in algorithms for driver assistance is a key point to reduce vehicle environmental impact.
5. Future Works
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- García-Contreras, R.; Gómez, A.; Fernández-Yáñez, P.; Armas, O. Estimation of thermal loads in a climatic chamber for vehicle testing. Transp. Res. Part D Transp. Environ. 2018, 65, 761–771. [Google Scholar] [CrossRef]
- Fernández-Yáñez, P.; Armas, O.; Martínez-Martínez, S. Impact of relative position vehicle-wind blower in a roller test bench under climatic chamber. Appl. Therm. Eng. 2016, 106, 266–274. [Google Scholar] [CrossRef]
- García-Contreras, R.; Soriano, J.A.; Fernández-Yáñez, P.; Sánchez-Rodríguez, L.; Mata, C.; Gómez, A.; Armas, O.; Cárdenas, M.D. Impact of regulated pollutant emissions of Euro 6d-Temp light-duty diesel vehicles under real driving conditions. J. Clean. Prod. 2021, 286, 124927. [Google Scholar] [CrossRef]
- Gómez, A.; Fernández-Yáñez, P.; Soriano, J.A.; Sánchez-Rodríguez, L.; Mata, C.; García-Contreras, R.; Armas, O.; Cárdenas, M.D. Comparison of real driving emissions from Euro VI buses with diesel and compressed natural gas fuels. Fuel 2021, 289, 119836. [Google Scholar] [CrossRef]
- Godiganur, V.S.; Nayaka, S.; Kumar, G.N. Thermal barrier coating for diesel engine application—A review. Mater. Today Proc. 2020, 45, 133–137. [Google Scholar] [CrossRef]
- Ezzitouni, S.; Fernández-Yáñez, P.; Sánchez, L.; Armas, O. Global energy balance in a diesel engine with a thermoelectric generator. Appl. Energy 2020, 269, 115139. [Google Scholar] [CrossRef]
- García-Contreras, R.; Agudelo, A.; Gómez, A.; Fernández-Yáñez, P.; Armas, O.; Ramos, Á. Thermoelectric Energy Recovery in a Light-Duty Diesel Vehicle under Real-World Driving Conditions at Different Altitudes with Diesel, Biodiesel and GTL Fuels. Energies 2019, 12, 1105. [Google Scholar] [CrossRef] [Green Version]
- Fernández-Yáñez, P.; Gómez, A.; García-Contreras, R.; Armas, O. Evaluating thermoelectric modules in diesel exhaust systems: Potential under urban and extra-urban driving conditions. J. Clean. Prod. 2018, 182, 1070–1079. [Google Scholar] [CrossRef]
- Boodaghi, H.; Etghani, M.M.; Sedighi, K. Performance analysis of a dual-loop bottoming organic Rankine cycle (ORC) for waste heat recovery of a heavy-duty diesel engine, Part I: Thermodynamic analysis. Energy Convers. Manag. 2021, 214, 113830. [Google Scholar] [CrossRef]
- Baldasso, E.; Mondejar, M.E.; Andreasen, J.G.; Rønnenfelt, K.A.T.; Nielsen, B.Ø.; Haglind, F. Design of organic Rankine cycle power systems for maritime applications accounting for engine backpressure effects. Appl. Therm. Eng. 2020, 178, 115527. [Google Scholar] [CrossRef]
- Hu, J.; Li, J.; Hu, Z.; Xu, L.; Ouyang, M. Power distribution strategy of a dual-engine system for heavy-duty hybrid electric vehicles using dynamic programming. Energy 2021, 215, 118851. [Google Scholar] [CrossRef]
- Sher, F.; Chen, S.; Raza, A.; Rasheed, T.; Razmkhah, O.; Rashid, T.; Rafi-ul-Shan, P.M.; Erten, B. Novel strategies to reduce engine emissions and improve energy efficiency in hybrid vehicles. Clean. Eng. Technol. 2021, 2, 100074. [Google Scholar] [CrossRef]
- Donkers, A.; Yang, D.; Viktorović, M. Influence of driving style, infrastructure, weather and traffic on electric vehicle performance. Transp. Res. Part D Transp. Environ. 2020, 88, 102569. [Google Scholar] [CrossRef]
- Asadi, B.; Vahidi, A. Predictive Cruise Control: Utilizing Upcoming Traffic Signal Information for Improving Fuel Economy and Reducing Trip Time. IEEE Trans. Control Syst. Technol. 2011, 19, 707–714. [Google Scholar] [CrossRef]
- Wadud, Z.; MacKenzie, D.; Leiby, P. Help or hindrance? The travel, energy and carbon impacts of highly automated vehicles. Transp. Res. Part A Policy Pract. 2016, 86, 1–18. [Google Scholar] [CrossRef] [Green Version]
- Zavalko, A. Applying energy approach in the evaluation of eco-driving skill and eco-driving training of truck drivers. Transp. Res. Part D Transp. Environ. 2018, 62, 672–684. [Google Scholar] [CrossRef]
- Barth, M.; Boriboonsomsin, K. Energy and emissions impacts of a freeway-based dynamic eco-driving system. Transp. Res. Part D Transp. Environ. 2009, 14, 400–410. [Google Scholar] [CrossRef]
- Mensing, F.; Trigui, R.; Bideaux, E. Vehicle trajectory optimization for application in ECO-driving. In Proceedings of the 2011 IEEE Vehicle Power and Propulsion Conference, Chicago, IL, USA, 6–9 September 2011; pp. 1–6. [Google Scholar]
- Mensing, F.; Trigui, R.; Bideaux, E. Vehicle trajectory optimization for hybrid vehicles taking into account battery state-of-charge. In Proceedings of the 2012 IEEE Vehicle Power and Propulsion Conference, Seoul, Korea, 9–12 October 2012; pp. 950–955. [Google Scholar]
- Wegener, M.; Koch, L.; Eisenbarth, M.; Andert, J. Automated eco-driving in urban scenarios using deep reinforcement learning. Transp. Res. Part C Emerg. Technol. 2021, 126, 102967. [Google Scholar] [CrossRef]
- Hellström, E.; Åslund, J.; Nielsen, L. Design of an efficient algorithm for fuel-optimal look-ahead control. Control Eng. Pract. 2010, 18, 1318–1327. [Google Scholar] [CrossRef] [Green Version]
- Rizzoni, G.; Guzzella, L.; Baumann, B.M. Unified modeling of hybrid electric vehicle drivetrains. IEEE/ASME Trans. Mechatron. 1999, 4, 246–257. [Google Scholar] [CrossRef]
- Guzzella, L.; Sciarretta, A. Vehicle Propulsion Systems: Introduction to Modeling and Optimization, 3rd ed.; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Bryson, A.E.; Ho, Y.-C. Applied Optimal Control: Optimization, Estimation, and Control; Routledge: Boca Raton, FL, USA, 2017. [Google Scholar]
- Bellman, R. The theory of dynamic programming. Bull. Amer. Math. Soc. 1954, 60, 503–515. [Google Scholar] [CrossRef] [Green Version]
- Sundstrom, O.; Guzzella, L. A generic dynamic programming Matlab function. In Proceedings of the 2009 IEEE Control Applications (CCA), Intelligent Control (ISIC), St. Petersburg, Russia, 8–10 July 2009; pp. 1625–1630. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Mass | 1575 kg |
| Drag coefficient | 0.35 |
| Frontal area | 2.2 m2 |
| Friction coefficient | 0.015 |
| Engine | Compression ignition, turbocharged |
| Displacement | 1598 cm3 |
| Max torque | 320 Nm @ 1750 rpm |
| Max power | 96 kW @ 4000 rpm |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fernández-Yáñez, P.; Soriano, J.A.; Mata, C.; Armas, O.; Pla, B.; Bermúdez, V. Simulation of Optimal Driving for Minimization of Fuel Consumption or NOx Emissions in a Diesel Vehicle. Energies 2021, 14, 5513. https://doi.org/10.3390/en14175513
Fernández-Yáñez P, Soriano JA, Mata C, Armas O, Pla B, Bermúdez V. Simulation of Optimal Driving for Minimization of Fuel Consumption or NOx Emissions in a Diesel Vehicle. Energies. 2021; 14(17):5513. https://doi.org/10.3390/en14175513
Chicago/Turabian StyleFernández-Yáñez, Pablo, José A. Soriano, Carmen Mata, Octavio Armas, Benjamín Pla, and Vicente Bermúdez. 2021. "Simulation of Optimal Driving for Minimization of Fuel Consumption or NOx Emissions in a Diesel Vehicle" Energies 14, no. 17: 5513. https://doi.org/10.3390/en14175513
APA StyleFernández-Yáñez, P., Soriano, J. A., Mata, C., Armas, O., Pla, B., & Bermúdez, V. (2021). Simulation of Optimal Driving for Minimization of Fuel Consumption or NOx Emissions in a Diesel Vehicle. Energies, 14(17), 5513. https://doi.org/10.3390/en14175513