
Mobile GPS Application Design Based on System-Level Power and Battery Status Estimation †


Abstract
:1. Introduction
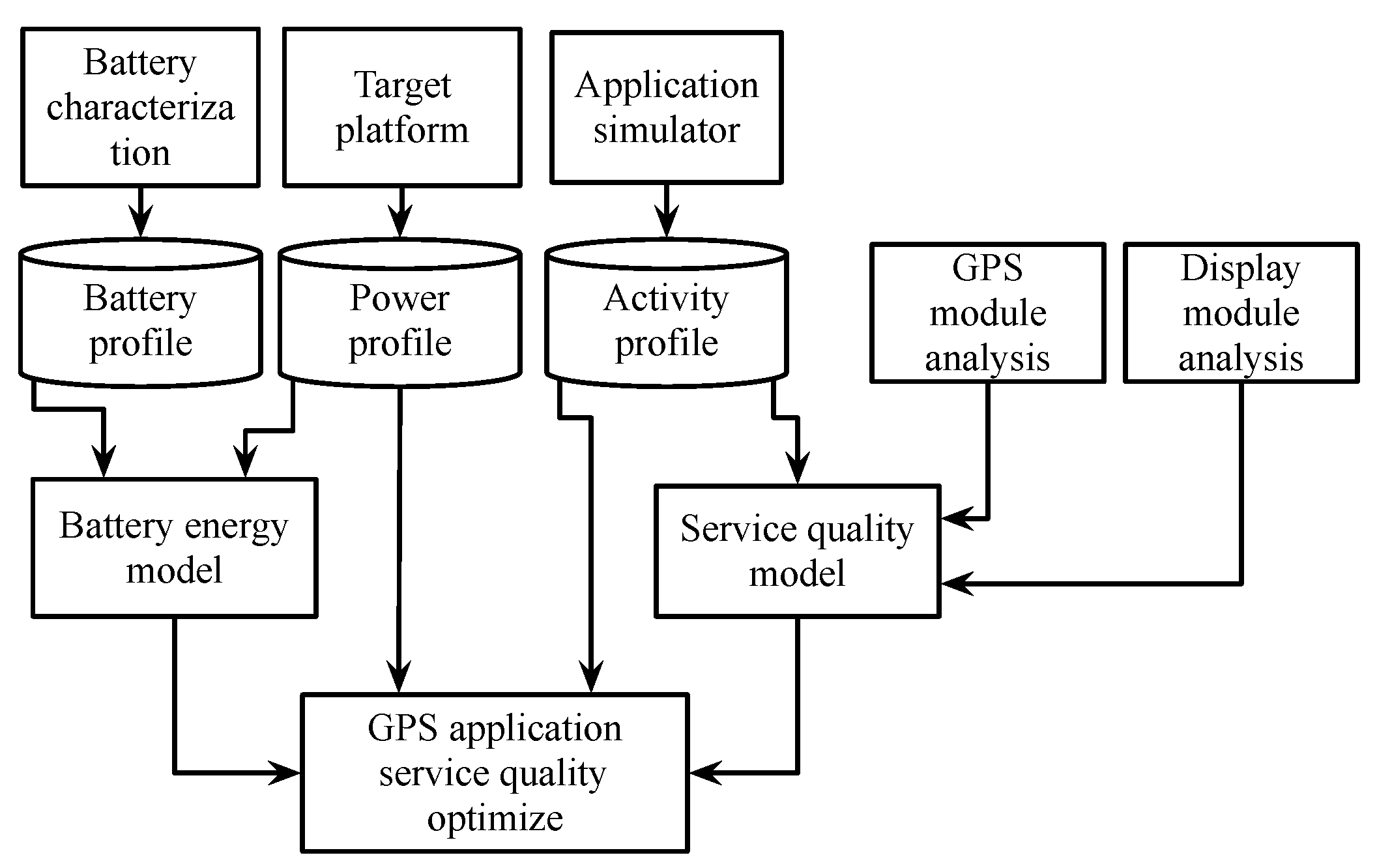
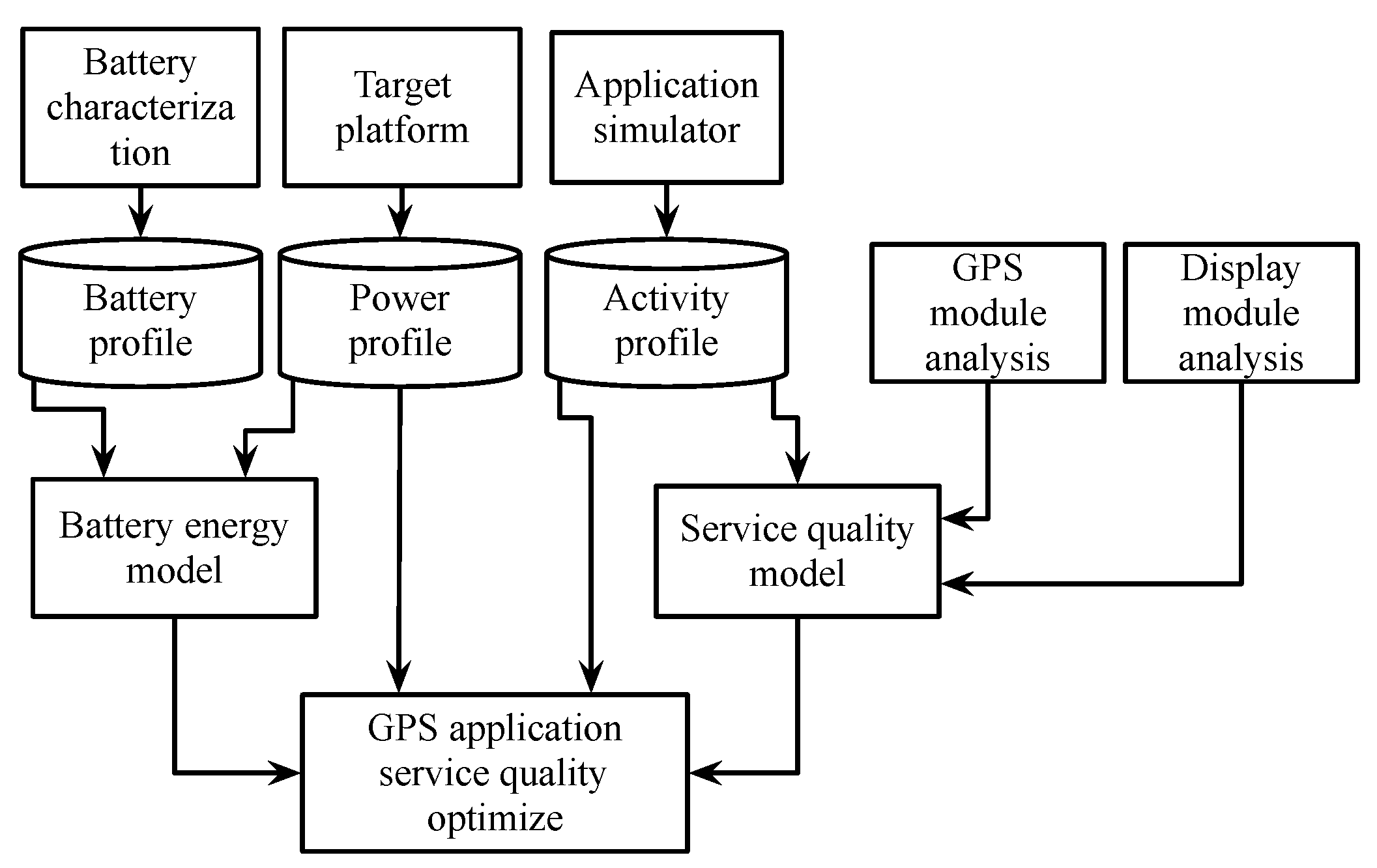
2. Energy-Aware Application Design Framework
3. Adaptive Control of Service Quality and Power Consumption
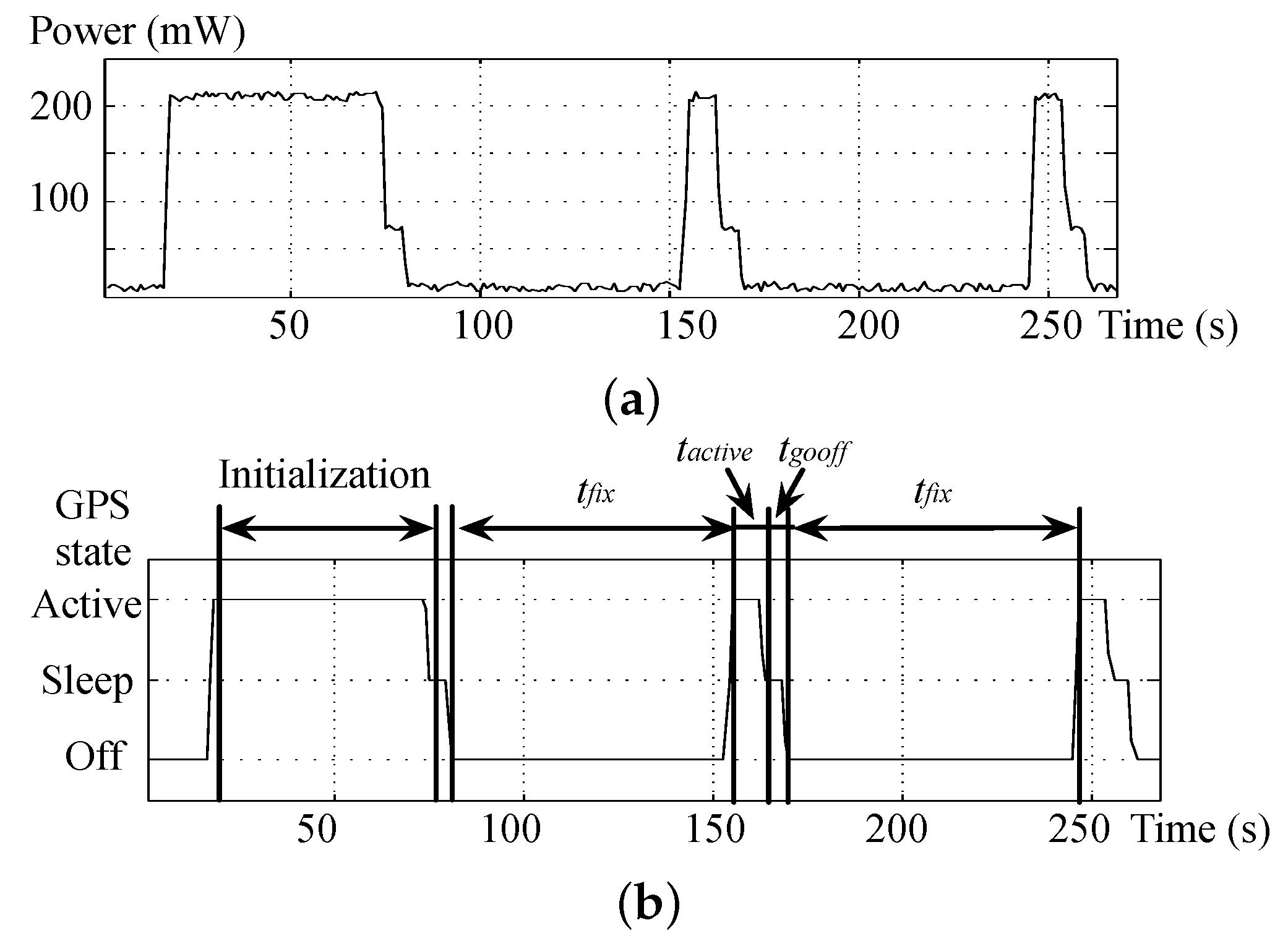
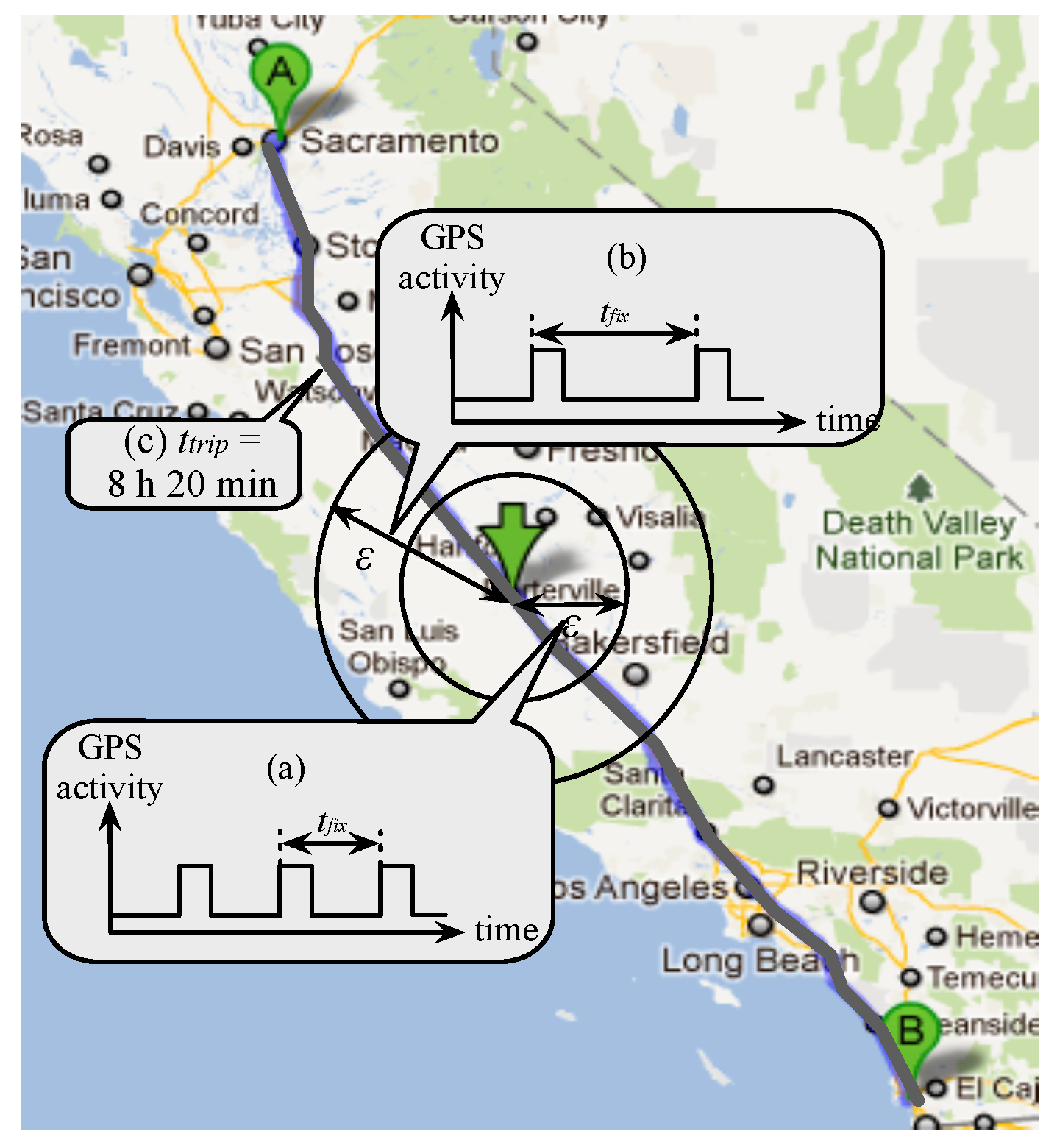
3.1. Service Quality of GPS Module
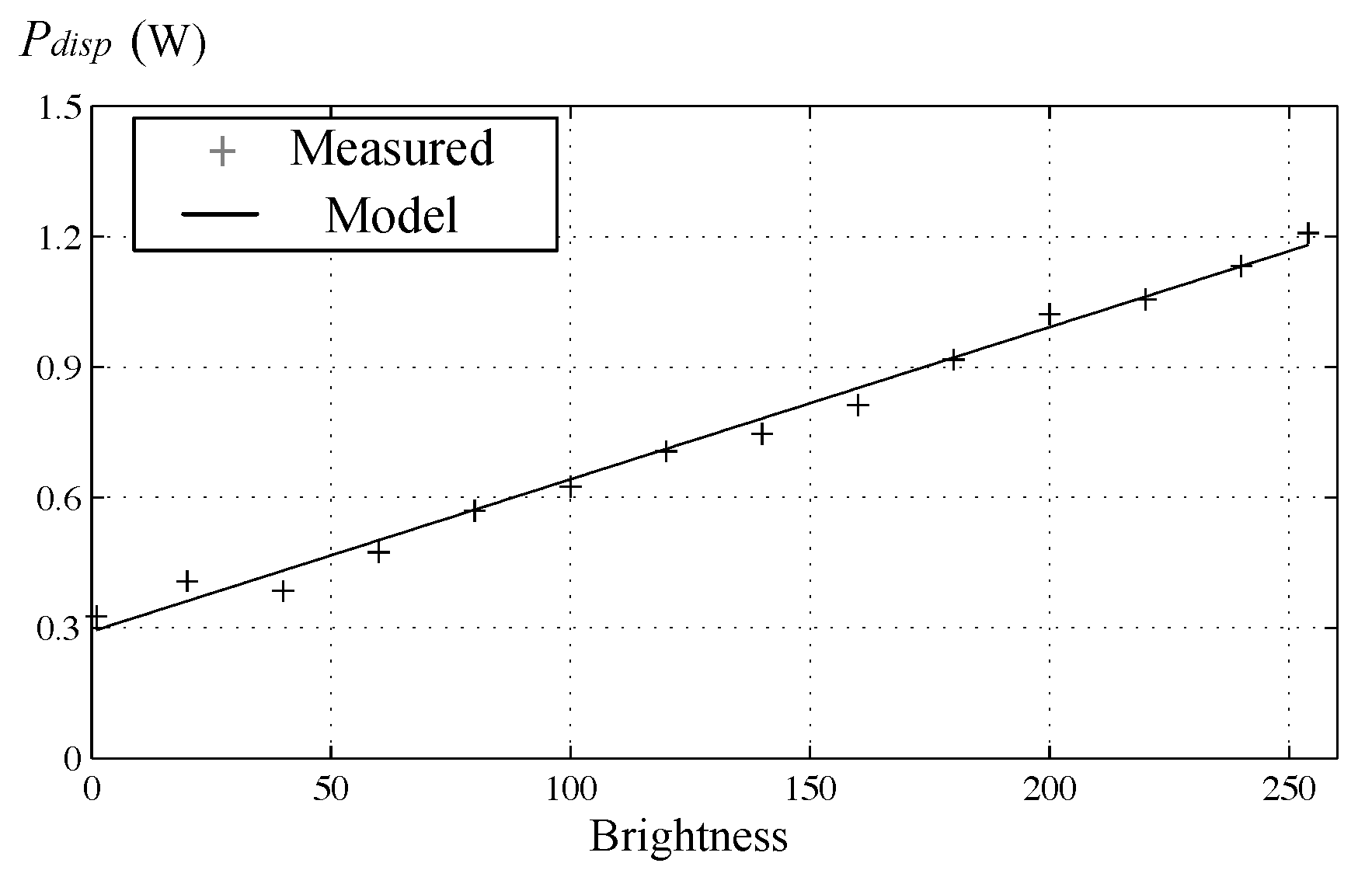
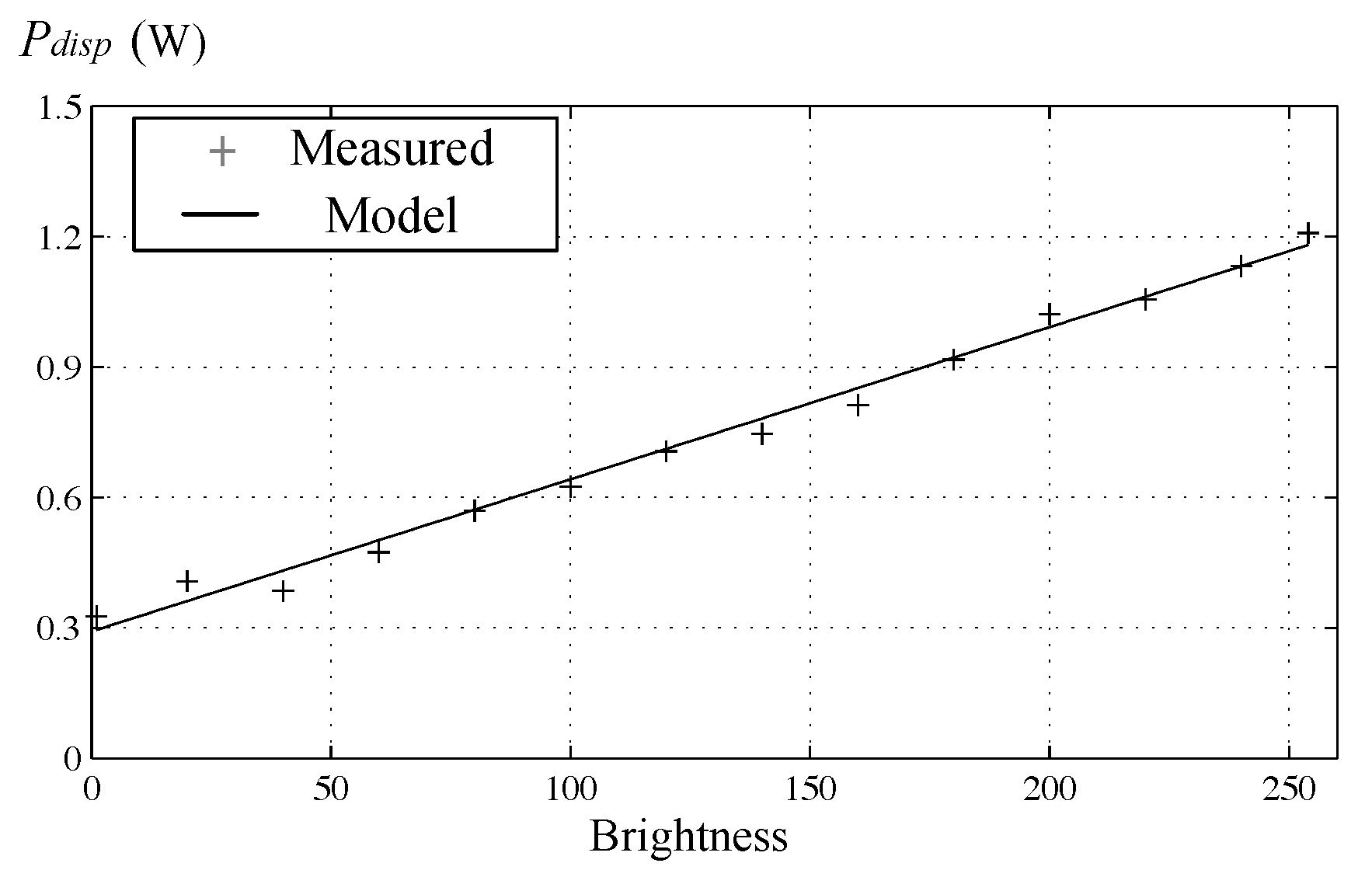
3.2. Display Image Quality
3.3. Adaptive Energy-Aware Service Quality Control
4. Problem Formulation
| Algorithm 1: Adaptive service quality and power control algorithm with variable velocity. |
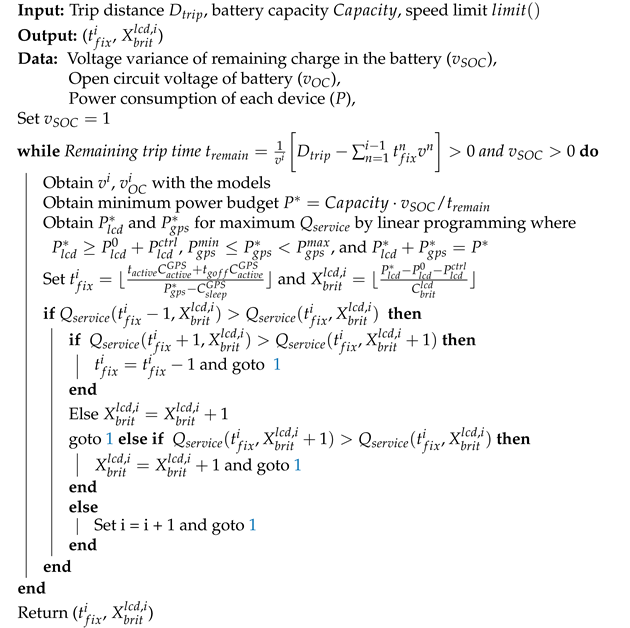 |
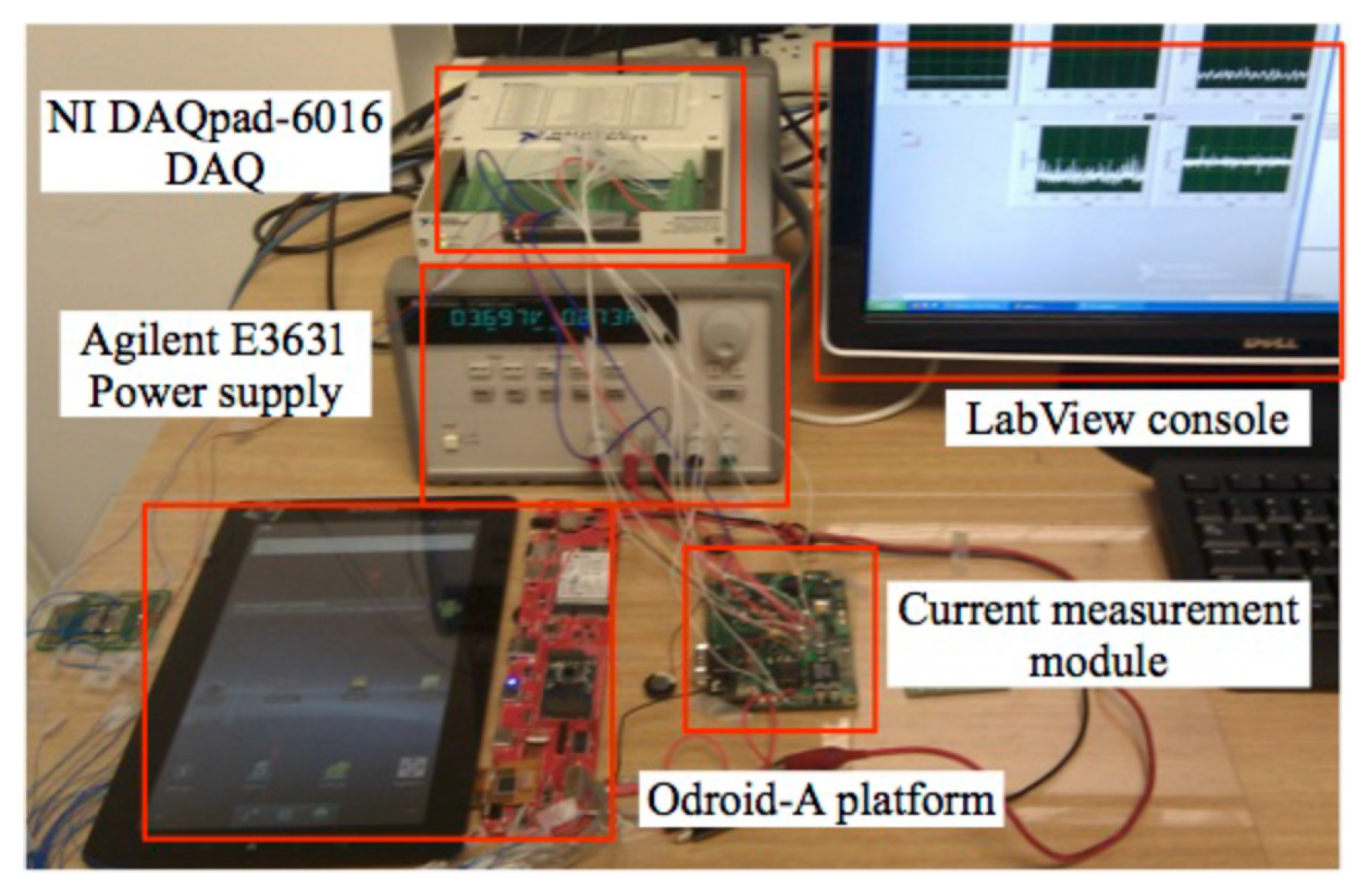
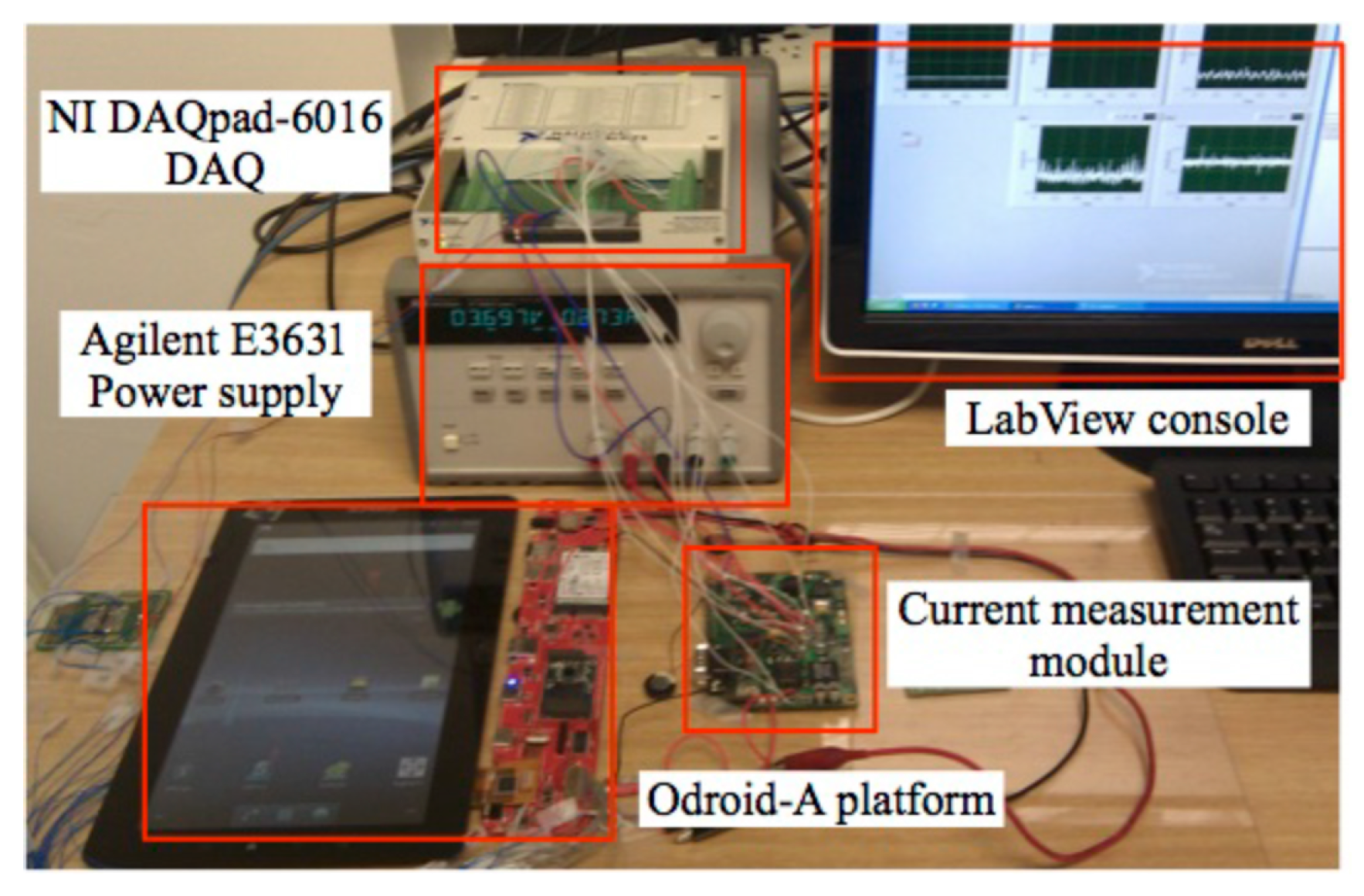
5. Experimental Methods
5.1. Accurate Energy Budget Considering Battery Internal Loss
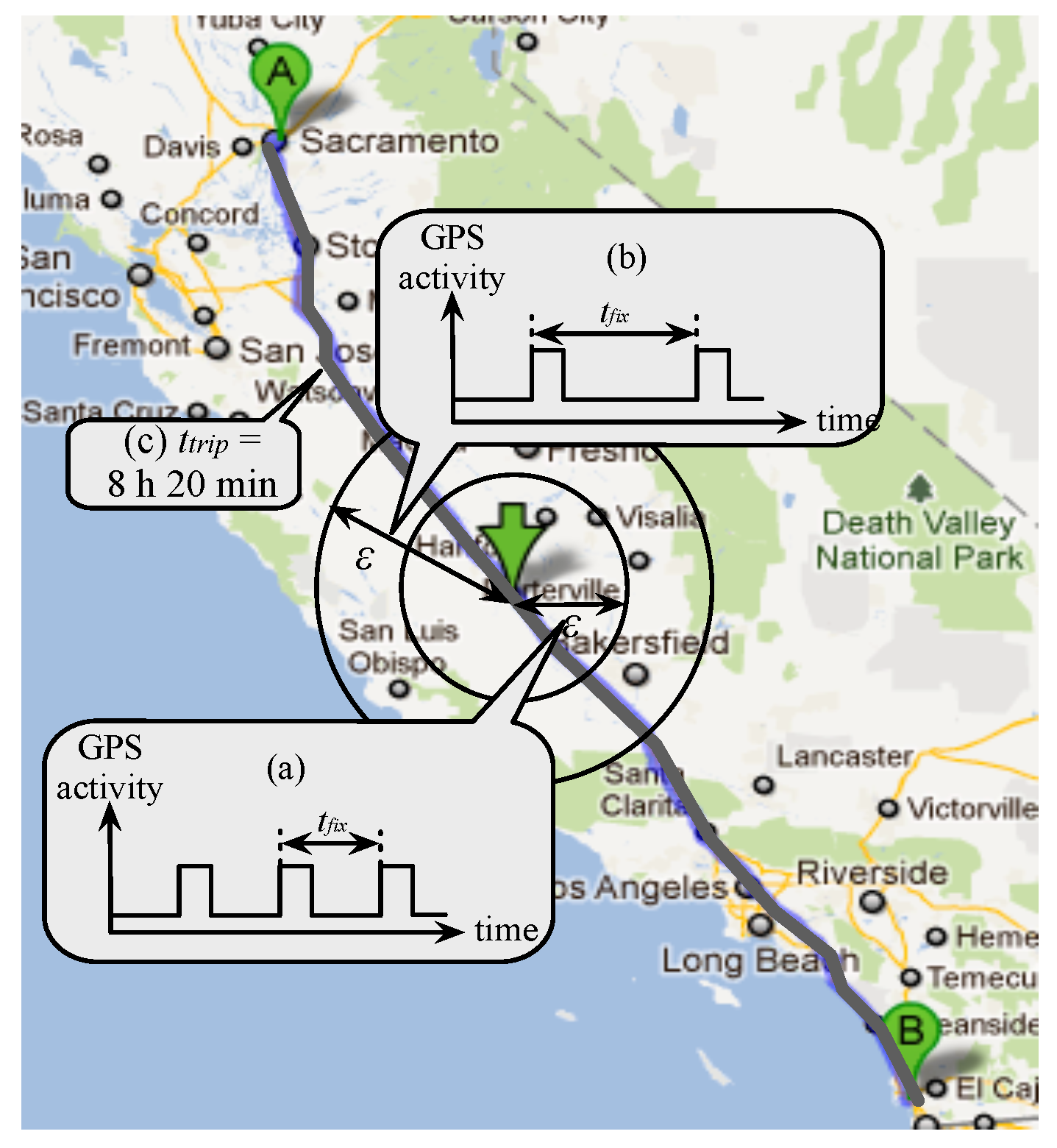
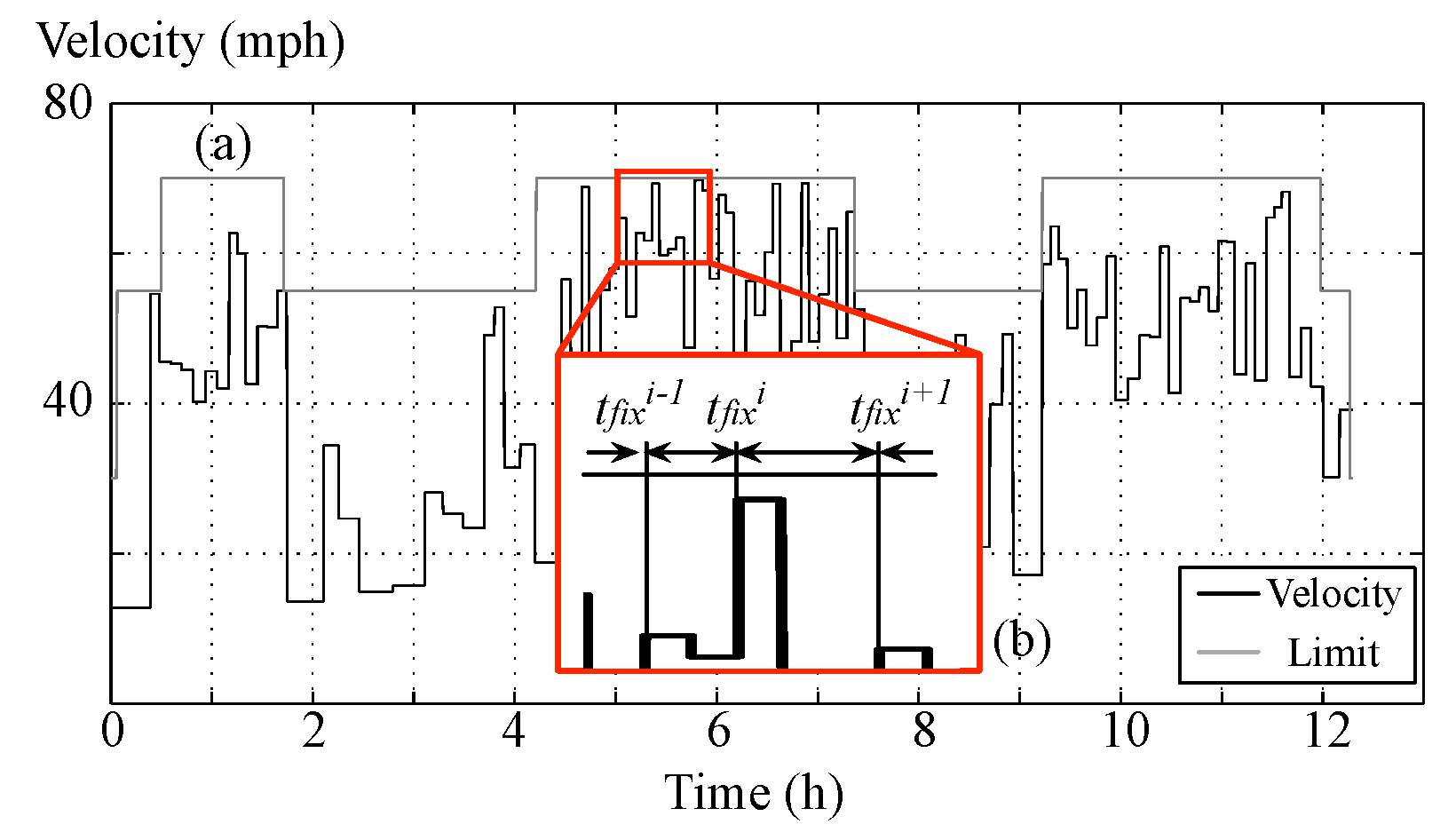
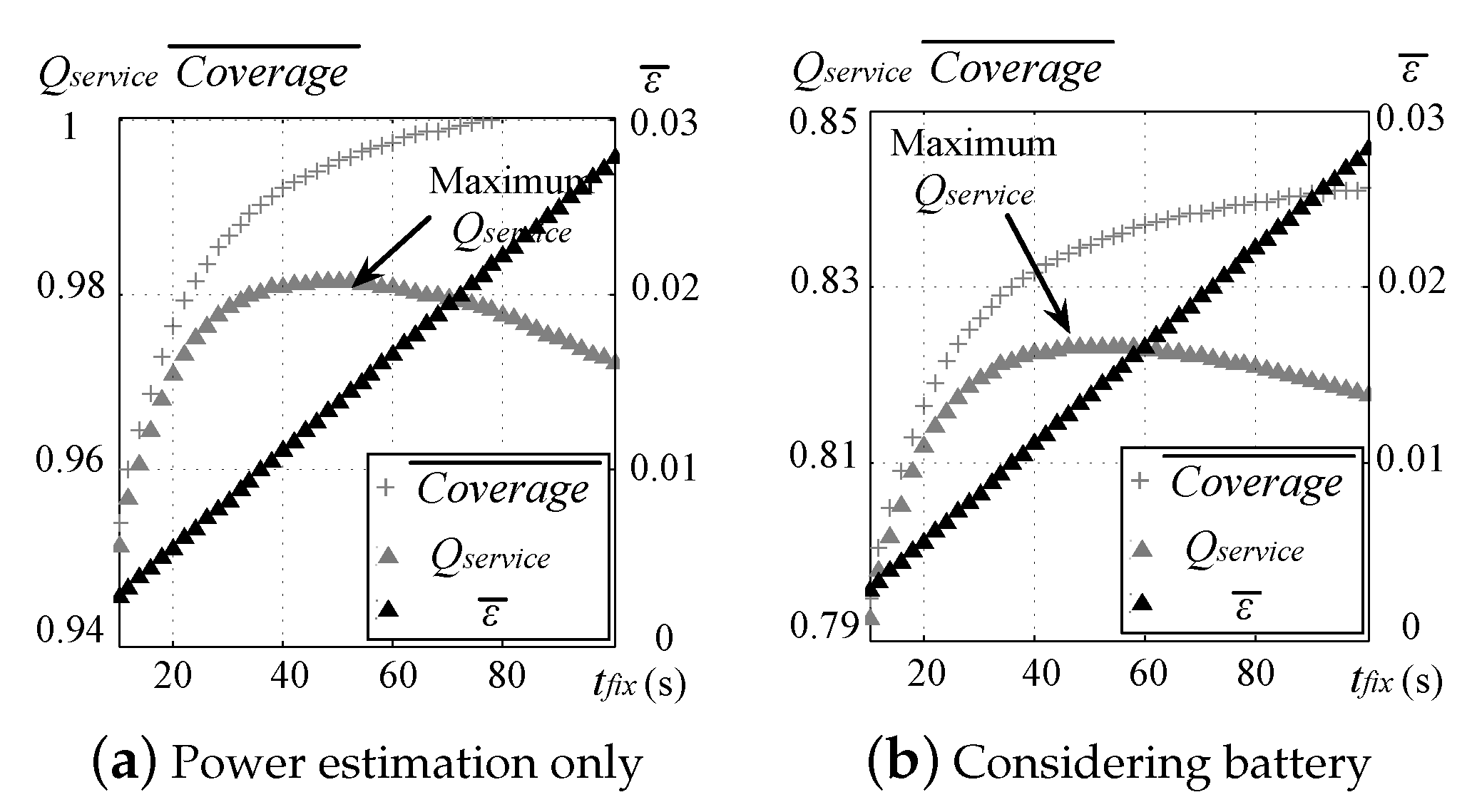
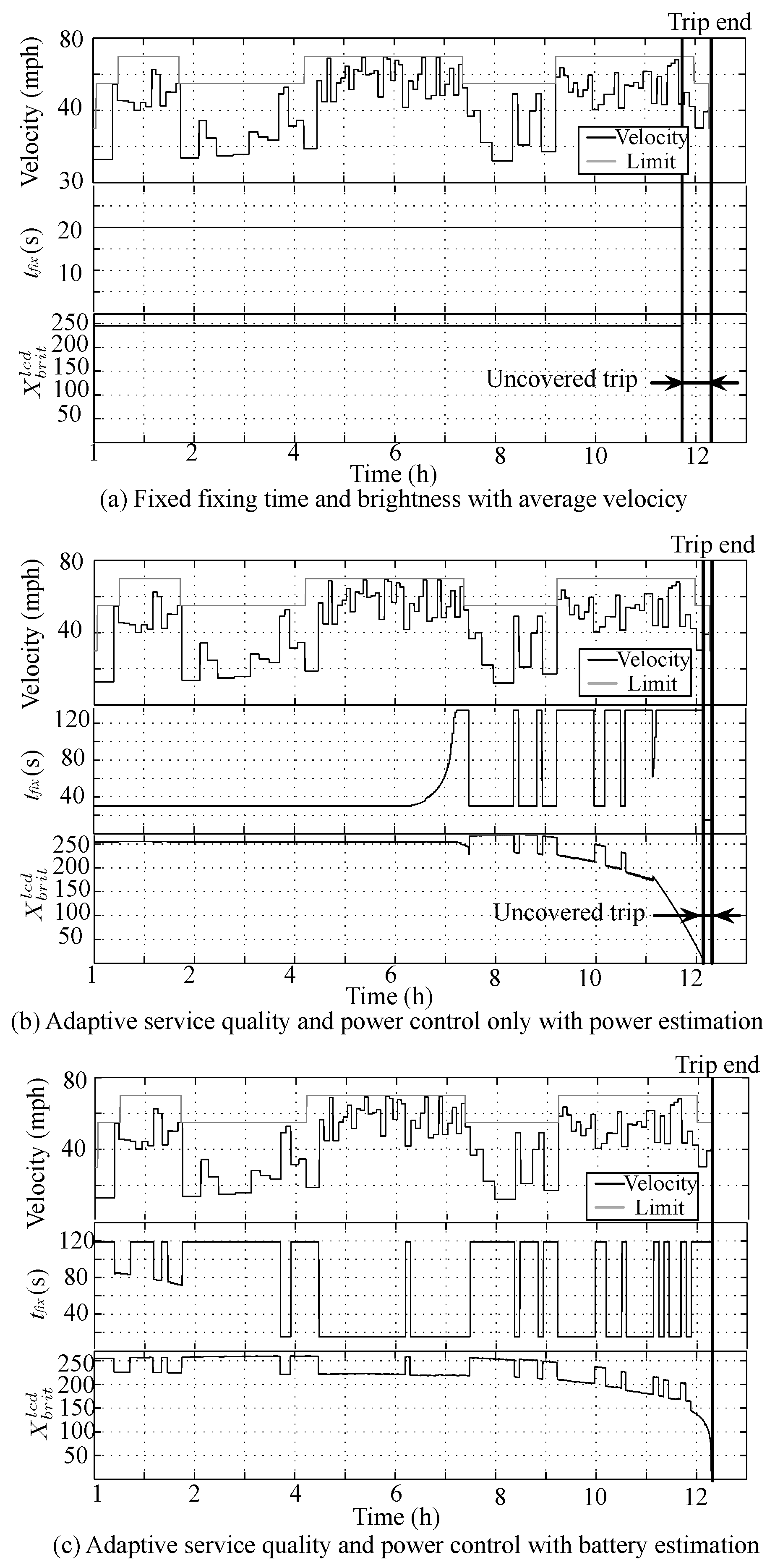
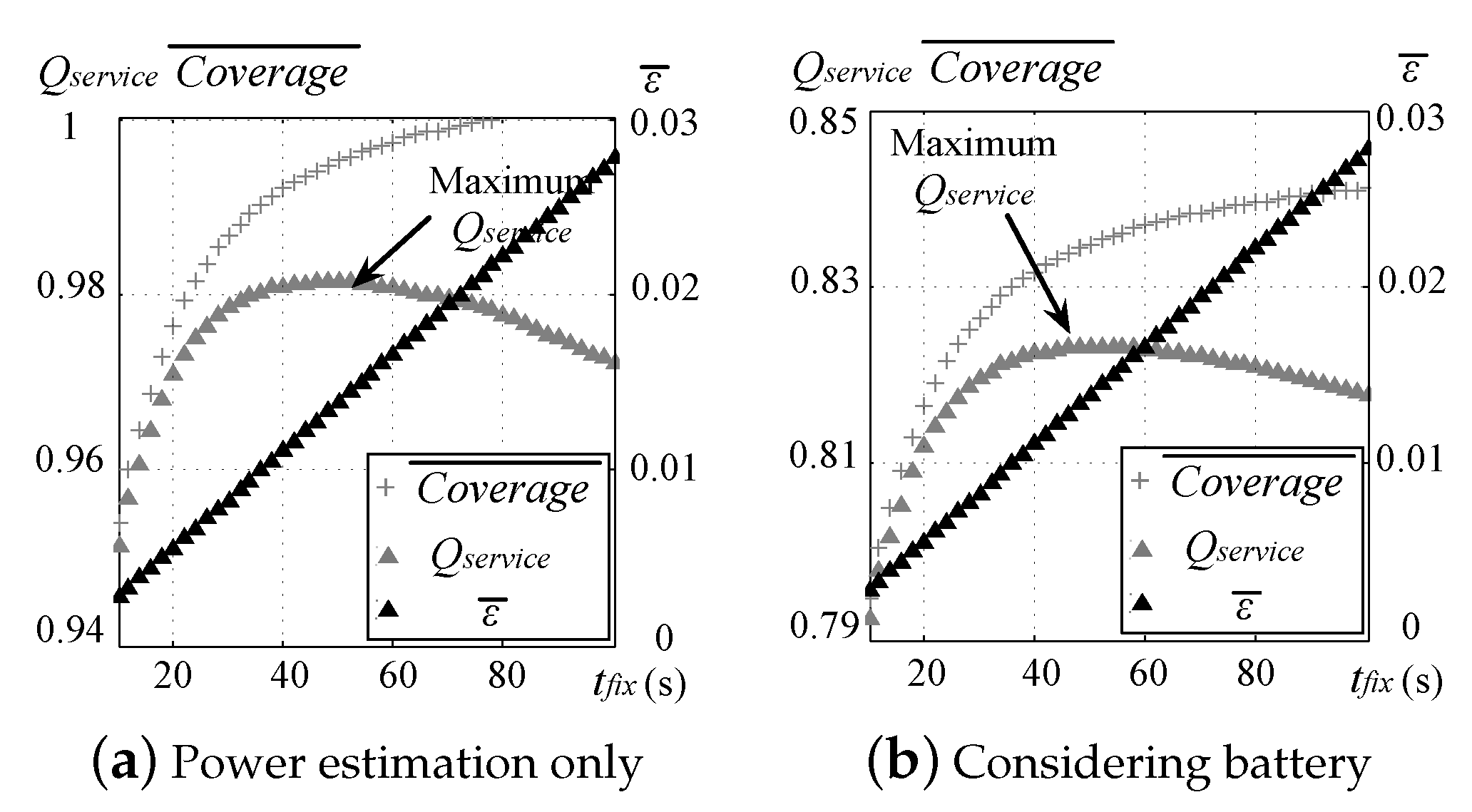
5.2. Adaptive Power and Service Quality Control of a GPS Application with Variable Velocity
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| GPS | Global Positioning System |
| OS | Operating System |
| SOC | State of Charge |
| QOS | Quality of Service |
| OC | Open Circuit |
| API | Application Programming Interface |
| LCD | Liquid Crystal Display |
| CCFL | Cold Cathode Fluorescent Lamp |
| LED | Light Emitting Diode |
| CPU | Central Processing Unit |
| TFT | Thin Film Transistor |
| VM | Vibration Motor |
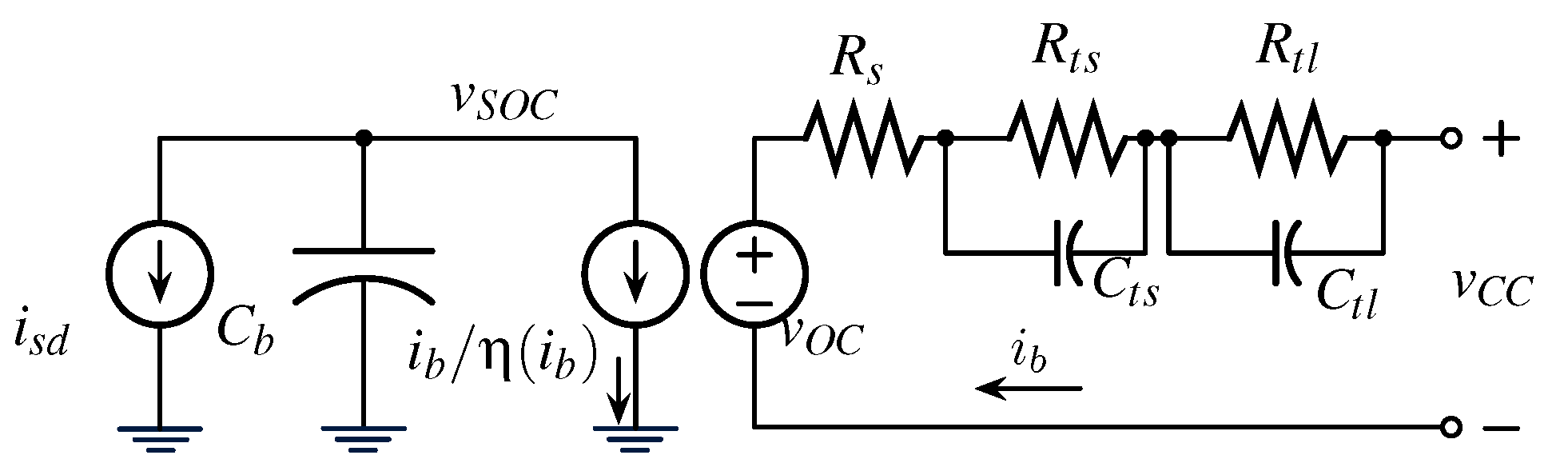
Appendix A. Battery Model
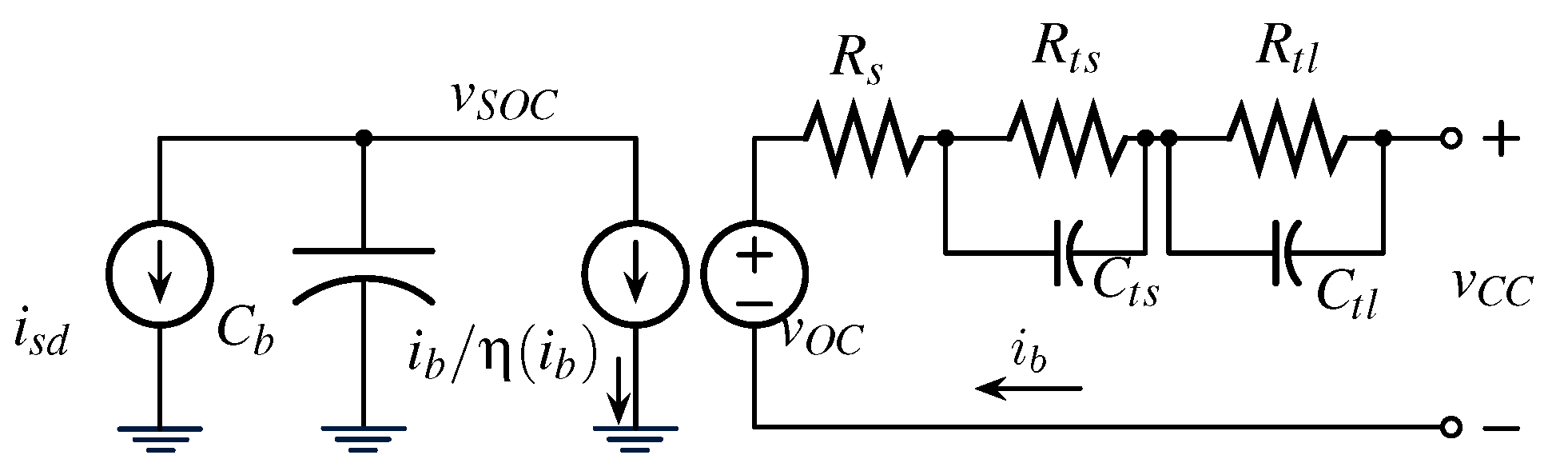
Appendix A.1. Battery Circuit Model

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Coeff. | Value | Coeff. | Value | Coeff. | Value |
|---|---|---|---|---|---|
| −0.265 | −61.649 | −2.039 | |||
| 5.276 | −4.173 | 1.654 | |||
| 3.356 | −0.043 | −14.275 | |||
| 0.154 | 0.019 |
Appendix A.2. Remaining Charge Estimation
Appendix B. Target Platform Model
| Components | Model | Descrpition |
|---|---|---|
| Processor | Exynos4210 | Dual-core CPU |
| cellular module | F5521GW | G + GPS module |
| Wi-Gi | GB8632 | Wi-Fi + bluetooth module |
| Display | LP101WH1 | 1366 × 768 TFT LCD |
| Audio codec | MAX98089 | Full-featured codec |
| Vibration motor | DMJBRK36S | Vibration motor |
| Battery | KPL6072196 | 10 Ah Lithium polymer |
Appendix B.1. CPU
Appendix B.2. Cellular Module
Appendix B.3. Wi-Fi Module
Appendix B.4. Display
Appendix B.5. Audio Device
Appendix B.6. GPS Module
Appendix B.7. Vibration Motor
| Component | Coeff. | Value | Coeff. | Value |
|---|---|---|---|---|
| Processor | 0.00642 | 0.332 | ||
| Cellular | 0.011 | 0.672 | ||
| 0.322 | ||||
| Wi-fi | 0.020 | 0.740 | ||
| Display | 0.004 | 0.224 | ||
| 1.307 | 0.067 | |||
| Audio | 0.024 | 0.00009 | ||
| Vibration motor | 0.003 | |||
| GPS | 0.011 | 0.212 | ||
| 0.069 |
References
- Shye, A.; Scholbrock, B.; Memik, G. Into the wild: Studing real user activity patterns to guide power optimizations for mobile architectures. In Proceedings of the 2009 42nd Annual IEEE/ACM International Symposium on Microarchitecture (MICRO), New York, NY, USA, 12–16 December 2009; pp. 168–178. [Google Scholar]
- Dong, M.; Zhong, L. Sesame: A self-constructive virtual power meter for battery-powered mobile systems. In Proceedings of the 9th International Conference on Mobile Systems, Applications, and Services (MobiSys 2011), Bethesda, MD, USA, 28 June– 1 July 2011. [Google Scholar]
- Zhang, L.; Tiwana, B.; Dick, R.P.; Wang, Z.; Mao, Z.M.; Qian, Z.; Yang, L. Accurate Online Power Estimation and Automatic Battery Behavior Based Power Model Generation for Smartphones. In Proceedings of the 2010 IEEE/ACM/IFIP International Conference on Hardware/Software Codesign and System Synthesis (CODES+ISSS), Scottsdale, AZ, USA, 24–29 October 2010. [Google Scholar]
- Bian, X.; Wei, Z.; He, J.; Yan, F.; Liu, L. A Two-Step Parameter Optimization Method for Low-Order Model-Based State-of-Charge Estimation. IEEE Trans. Transp. Electrif. 2021, 7, 399–409. [Google Scholar] [CrossRef]
- Wei, Z.; Hu, J.; He, H.; Li, Y.; Xiong, B. Load Current and State-of-Charge Coestimation for Current Sensor-Free Lithium-Ion Battery. IEEE Trans. Power Electron. 2021, 36, 10970–10975. [Google Scholar] [CrossRef]
- Hu, J.; He, H.; Wei, Z.; Li, Y. Disturbance-Immune and Aging-Robust Internal Short Circuit Diagnostic for Lithium-Ion Battery. IEEE Trans. Ind. Electron. 2021. early access. [Google Scholar] [CrossRef]
- Kim, Y.; Park, S.; Cho, Y.; Chang, N. System-Level Online Power Estimation using an On-Chip Bus Performance Monitoring Unit. IEEE Trans. Comput.-Aided Des. Integr. Circ. Syst. (TCAD) 2011, 30, 1585–1598. [Google Scholar]
- Gurun, S.; Krintz, C. A run-time, feedback-based energy estimation model for embedded devices. In Proceedings of the 4th International Conference on Hardware/Software Codesign and System Synthesis, Seoul, Korea, 22–25 October 2006; pp. 28–33. [Google Scholar]
- Majima, T.; Yokoyama, T.; Zeng, G.; Kamiyama, T.; Tomiyama, H.; Takada, H. Modeling Power Consumption of Applications in Wireless Communication Devices Using OS Level Profiles. In Proceedings of the International SoC Design Conference, Busan, Korea, 22–24 November 2009. [Google Scholar]
- Shin, D.; Lee, W.; Kim, K.; Wang, Y.; Xie, Q.; Pedram, M.; Chang, N. Online Estimation of the Remaining Energy Capacity in Mobile Systems Considering System-Wide Power Consumption and Battery Characteristics. In Proceedings of the Asia South Pacific Design Automation Conference (ASP-DAC), Yokohama, Japan, 22–25 January 2013. [Google Scholar]
- Navsys Corporation. Low–Power GPS Applications. Available online: http://www.navsys.com/ (accessed on 26 August 2021).
- Chen, K.; Tan, G.; Cao, J.; Lu, M.; Fan, X. Modeling and Improving the Energy Performance of GPS Receivers for Location Services. IEEE Sens. J. 2020, 20, 4512–4523. [Google Scholar] [CrossRef]
- Raskovic, D.; Giessel, D. Battery-Aware Embedded GPS Receiver Node. In Proceedings of the 2007 Fourth Annual International Conference on Mobile and Ubiquitous Systems: Networking & Services (MobiQuitous), Philadelphia, PA, USA, 6–10 August 2007; pp. 1–6. [Google Scholar]
- Thiagarajan, A.; Ravindranath, L.; LaCurts, K.; Madden, S.; Balakrishnan, H.; Toledo, S.; Eriksson, J. VTrack: Accurate, Energy-aware Road Traffic Delay Estimation Using Mobile Phones. In Proceedings of the 7th ACM Conference on Embedded Network Sensor Systems (SenSys09), Berkeley, CA, USA, 4–6 November 2009. [Google Scholar]
- KhademSohi, H.; Sharifian, S.; Faez, K. Accuracy-energy optimized location estimation method for mobile smartphones by GPS/INS data fusion. In Proceedings of the 2016 2nd International Conference of Signal Processing and Intelligent Systems (ICSPIS), Tehran, Iran, 14–15 December 2016. [Google Scholar]
- Alemneh, E.; Senouci, S.; Brunet, P. An Energy Efficient Smartphone Sensors’ Data Fusion for High Rate Position Sampling Demands. In Proceedings of the 2019 16th IEEE Annual Consumer Communications Networking Conference (CCNC), Las Vegas, NV, USA, 11–14 January 2019. [Google Scholar]
- Brown, A.; Brown, P.; Griesbach, J.; Boult, T. A Wireless GPS Wristwatch Tracking Solution. In Proceedings of the SDR Forum 2006, Fort Worth, TX, USA, 26–29 September 2006. [Google Scholar]
- Sottile, E.; Giacchetti, T.; Tuveri, G.; Piras, F.; Calli, D.; Concas, V.; Zamberlan, L.; Meloni, I.; Carrese, S. An innovative GPS smartphone based strategy for university mobility management: A case study at the University of RomaTre, Italy. Res. Transp. Econ. 2021, 85, 100926. [Google Scholar] [CrossRef]
- Danko, M.; Hanko, B.; Drgoňa, P. Optimized Control of Energy Flow in an Electric Vehicle based on GPS. Commun. Sci. Lett. Univ. Zilina 2021, 23, C7–C14. [Google Scholar] [CrossRef]
- Chang, N.; Choi, I.; Shim, H. DLS: Dynamic Backlight Luminance Scaling of Liquid Crystal Display. IEEE Trans. Very Large Scale Integr. Syst. (TVLSI) 2004, 12, 837–846. [Google Scholar] [CrossRef]
- Hardkernel, Co. Ltd. Odroid-A Platform. Available online: http://www.hardkernel.com (accessed on 26 August 2021).
- Texas Instruments, Co. Ltd. INA194 Current Sense Amplifier. Available online: https://www.ti.com/product/INA194 (accessed on 26 August 2021).
- National Instruments Co. National Instruments. Available online: https://www.ni.com (accessed on 26 August 2021).
- Agilent Co. Agilent E3631 Power Supply. Available online: https://www.keysight.com/us/en/product/E3631A (accessed on 26 August 2021).
- Rong, P.; Pedram, M. An analytical model for predicting the remaining battery capacity of Lithium-ion batteries. IEEE Trans. Very Large Scale Integr. Syst. 2006, 14, 441–451. [Google Scholar] [CrossRef]
- Moura, S.J.; Argomedo, F.B.; Klein, R.; Mirtabatabaei, A.; Krstic, M. Battery State Estimation for a Single Particle Model with Electrolyte Dynamics. IEEE Trans. Control Syst. Technol. 2017, 25, 453–468. [Google Scholar] [CrossRef]
- Chen, N.; Zhang, P.; Dai, J.; Gui, W. Estimating the State-of-Charge of Lithium-Ion Battery Using an H-Infinity Observer Based on Electrochemical Impedance Model. IEEE Access 2020, 8, 26872–26884. [Google Scholar] [CrossRef]
- Zheng, L.; Zhu, J.; Wang, G.; Lu, D.D.; He, T. Lithium-ion Battery Instantaneous Available Power Prediction Using Surface Lithium Concentration of Solid Particles in a Simplified Electrochemical Model. IEEE Trans. Power Electron. 2018, 33, 9551–9560. [Google Scholar] [CrossRef]
- Rakhmatov, D. Battery voltage modeling for portable systems. ACM Trans. Des. Autom. Electron. Syst. 2009, 14, 1–36. [Google Scholar] [CrossRef]
- Chen, M.; Rincon-Mora, G. Accurate electrical battery model capable of predicting runtime and I–V performance. IEEE Trans. Energy Convers. 2006, 21, 504–511. [Google Scholar] [CrossRef]
- Ruan, H.; He, H.; Wei, Z.; Quan, Z.; Li, Y. State of Health Estimation of Lithium-ion Battery Based on Constant-Voltage Charging Reconstruction. IEEE J. Emerg. Sel. Top. Power Electron. 2021. early access. [Google Scholar] [CrossRef]
- Benini, L.; Castelli, G.; Macii, A.; Macii, E.; Poncino, M.; Scarsi, R. Discrete-time battery models for system-level low-power design. IEEE Trans. Very Large Scale Integr. Syst. 2001, 9, 630–640. [Google Scholar] [CrossRef]
- Linden, D.; Reddy, T.B. Handbook of Batteries; McGrew-Hill Professional: New York, NY, USA, 2001. [Google Scholar]


| Symbol | Description | Symbol | Description |
|---|---|---|---|
| maximum locating error of the GPS | v | velocity of GPS tracking object | |
| fixing period of the GPS | fundamental GPS error | ||
| duration of the ACTIVE state of the GPS | duration of the SLEEP state of the GPS | ||
| period of one GPS activation cycle | normalized trip coverage | ||
| service time (battery lifetime) | given trip time | ||
| energy used in the GPS module in a certain period | time period | ||
| , , | power coefficients of the GPS | duration ratio of the OFF state of the GPS | |
| duration ratio of the SLEEP state of the GPS | duration ratio of the ACTIVE state of the GPS | ||
| energy used by other devices in the smartphone | internal energy loss of the battery | ||
| open-circuit voltage of the battery | quality of service of LCD | ||
| brightness of the LCD | quality of service of the application (system) | ||
| , , | Weight values to calculate | battery internal resistance |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, J.; Chang, N.; Shin, D. Mobile GPS Application Design Based on System-Level Power and Battery Status Estimation. Energies 2021, 14, 5333. https://doi.org/10.3390/en14175333
Kim J, Chang N, Shin D. Mobile GPS Application Design Based on System-Level Power and Battery Status Estimation. Energies. 2021; 14(17):5333. https://doi.org/10.3390/en14175333
Chicago/Turabian StyleKim, Jaemin, Naehyuck Chang, and Donghwa Shin. 2021. "Mobile GPS Application Design Based on System-Level Power and Battery Status Estimation" Energies 14, no. 17: 5333. https://doi.org/10.3390/en14175333
APA StyleKim, J., Chang, N., & Shin, D. (2021). Mobile GPS Application Design Based on System-Level Power and Battery Status Estimation. Energies, 14(17), 5333. https://doi.org/10.3390/en14175333