1. Introduction
There is much scientific evidence that climate change is taking place and is anthropogenic in nature, and this can also be found in recent NASA scientific publications [
1,
2,
3,
4]. The name of this phenomenon refers to the greenhouse into which more energy (from the sun) flows than is emitted from it, which gradually increases the temperature inside the greenhouse, enabling cultivation even during winter. In the case of our planet, the greenhouse gases emitted by humanity disturb the energy balance of planet Earth reducing the amount of energy emitted by our planet into space. Additionally, in this case, the global average temperature increases. Since the Earth’s climate is a very complex system, global warming does not exclude that local temperatures may also drop for a longer period of time, but that does not mean that the process is not happening. The heating of the air, land and oceans means that there is more energy in the atmosphere, which, combined with more intense evaporation of water from the seas and oceans, results in the intensification and increase in the frequency of extreme weather phenomena.
There is [
1,
2,
3,
4] no doubt that the world faces a dramatic climate crisis, never before seen in the history of mankind. Wildfires in Australia and Siberia in 2020, the heat of June 2021 in Canada, with the highest recorded temperature of 49.5 °C (121.1 °F) in Lytton (British Columbia), a tornado in the Czech Republic in June 2021, catastrophic rainstorms and flooding in Germany and China in July 2021, are harbingers of future extreme weather events resulting from the greenhouse effect. These phenomena will be more frequent and intense in the future. Europe is not prepared for a hurricane, and its effects would be more dramatic than for the US due to the denser population and construction. The global greenhouse effect also includes more frequent droughts, water shortages, natural disasters, hunger, population migrations, human conflicts (including wars), and damage to technical infrastructure. Although broken power lines can be repaired relatively quickly, it may be more difficult to quickly repair or replace electric transformers (especially of high power). Most transformers were not designed to operate at elevated temperatures, which are beginning to be noted. Heat waves are also a greater load on the power grid due to the higher power consumption of air-conditioning devices. Power cuts are not only inconveniences for the population who will not be able to use household electrical appliances and lighting. Nowadays, societies are much more dependent on the supply of electricity than they were only a few decades ago. Long-term interruptions in power supply include the lack of power for hydrophores supplying water to apartments, pumps pumping water for irrigation of farmlands (problems with food production), downtime of factories producing food and drugs, no possibility of refueling at gas stations and related possible downtime in food supplies to cities with millions of inhabitants. The weather phenomena caused by the greenhouse effect will trigger local periodic breakdowns in energy, material, and commodity supply chains that humanity will have to learn to quickly combat, compensate for, and counteract. The global greenhouse effect is a serious problem that already affects many millions of people. Societies and governments around the world are becoming more and more aware of this problem. More and more attention is paid to the fight against global warming and attempts are made to stop this process, and then to reverse it. Increasing efforts in this direction should be expected.
In order to contain the global greenhouse effect, mankind must take a number of actions. One of them is the urgent need to find a source of cheap, clean, green electricity that would be acceptable to the international ecological community. It might seem that the solution is renewable energy sources based on solar and wind energy. According to the authors, renewable energy sources have many advantages and there will always be individual or business customers who, having such an opportunity, will want to be prosumers, neutral and energy independent. Such independence also gives a business advantage, as to some extent it makes companies independent of the sometimes unpredictable pricing policy of their countries, enabling them to maintain competitive prices of their own products. Technological progress will also gradually increase the efficiency of such solutions, and thus their profitability and effectiveness. Undoubtedly, the widespread use of renewable energy sources will contribute to the improvement of the energy balance of the planet Earth, will slow down the process of global warming, but unfortunately it will not solve the global energy problems of mankind.
The first basic limitation for solar and wind power plants is the daily fluctuations in electricity production, which can reach even 90%. At night, solar panels do not produce electricity. Wind farms also have downtime. At sea, there can be almost no wind periods, and on land, in case of strong winds, the operation of windmills is switched off by setting them so that they exhibit the lowest possible aerodynamic drag. Due to the increasing frequency of extreme weather events resulting from global warming, one should expect more and more severe onshore windstorms during which wind farms will not be able to operate (at least those using today’s technology). Fluctuations in electricity production could be eliminated if we could efficiently store large amounts of electricity obtained during a period of overproduction. In practice, the solutions available on the market are still too expensive to be used on a large industrial scale. Progress in the development of battery systems is too slow. There is some hope for a solution to this problem with advances in fuel cells—energy could be stored in the form of hydrogen produced by electrolysis of water and then recovered in fuel cells using hydrogen. The advantage of hydrogen is that it has a greater density of stored energy compared to today’s battery solutions. However, any additional indirect process in electricity production will always reduce the global efficiency of the system and increase costs, which may affect the competitiveness of a given solution against other technologies. The comparison of the stored power density for various solutions available on the market can be found in the works [
5,
6].
The reliability of electricity supplies from solar or wind farms is also debatable in the context of the recent events that took place in Texas (USA) and Germany in February 2021. A sudden snowstorm caused icing of the wind turbine elements, immobilizing them, while the photovoltaic panels were iced and covered with snow. Together with the damage to the transmission lines, it resulted in the breakdown of the electricity supply chain. During this energy crisis, electricity prices in Texas soared by up to 1000%. Many experts believe that by using snow and ice removal systems, real-time monitoring of wind farms and solar farms, similar problems in the future can be avoided. Unfortunately, extreme weather events caused by global warming will become more frequent and more intense, which may render such systems ineffective. In order to secure electricity supplies for the future, one should strive to diversify its production and supply sources. The course of the energy crisis in Texas is described on U.S. Energy Information Agency (EIA) website [
7] where the EIA also stated
“Natural gas wells in the region have been affected by freezing temperatures that have disrupted production, and pipeline compressors have lost power, which have both reduced deliveries. Refineries in the area have halted production”.
In the long term, it is also impossible to meet the growing energy needs of humanity using only Earth’s renewable energy sources. On 9 May 2019, the Blue Origin company organized an event where it presented its prototype of the lunar lander [
8]. At this event, Jeff Bezos noticed that, on average, humanity’s energy needs doubling every 25 years. He also added that satisfying [
8] the current energy needs of mankind with solar energy would require the entire state of Nevada to be covered with photovoltaic panels, and in about 200 years all land on Earth. The solution could be the construction of orbital energy stations that are mega-structures composed of photovoltaic panels. In orbit, photovoltaic panels achieve higher efficiency due to the lack of absorption of sunlight by the Earth’s atmosphere and the possibility of selecting a highly solar orbit almost all day long. Concepts of such systems are developed by scientists and described in the works [
9,
10,
11].
An obstacle in the construction of orbital energy stations is the still high cost of carrying loads into space. In order to launch a payload into space, it is necessary to overcome the Earth’s force of gravity, which makes it more energy-efficient to bring it, for example, from the moon, when using a rocket propulsion. Space mining will be helpful in the construction of orbital power stations, but it is only just developing. We do not yet know how to build huge installations operating in microgravity conditions. Humanity has never built a mega-structure in space, and such a project would be incomparably larger than anything we have previously built or placed in space. We also do not have methods for efficiently transferring large amounts of electricity from orbit to Earth. Solar panels used in space differ from those for terrestrial applications and are more expensive than them, although progress is being made in this area.
Classic nuclear energy causes controversy among ecologists and it is also not a sufficient solution due to the constantly growing energy demand of mankind. However, it can be a supplement to energy from renewable sources and stabilize the energy system in times of production shortage. Such a combined system will have a lower carbon footprint, will be less destructive to the environment than coal-based energy, and at the same time will be more energy-stable than energy based solely on renewable energy sources. There are also mini nuclear reactors on the market, which, e.g., the chemical industry is starting to use to reduce the carbon footprint. An example of such a transaction is the agreement between the polish fuel company ORLEN and the Synthos Group regarding the development of nuclear energy in Poland [
12].
The energetic problems of mankind will be solved by energetics based on a controlled fusion reaction. Fusion reactions take place in stars, and our sun’s energy comes from this type of reaction. Mastering the technology of controlled thermonuclear fusion would give mankind an almost inexhaustible source of cheap, clean, and green energy for many thousands of years. Unfortunately, we do not have such technology yet. The world’s most famous project, ITER, is a huge, complex international project with an estimated total construction cost of approximately
$20 billion [
13]. This project is important for the development of fusion power, but it cannot be a determinant for commercial projects. In many places around the world, research on thermonuclear fusion is carried out, as described in the works [
14,
15,
16,
17,
18,
19]. Particularly noteworthy is the work [
16] from 2010, which summarizes over 50 years of work on the development of controlled thermonuclear fusion.
Since the publication of article [
16], the world has made great progress in high-temperature superconductor technology (necessary for plasma stabilization) and in the work on controlled thermonuclear fusion. Some of these works have been described in publications [
20,
21,
22,
23,
24,
25,
26,
27,
28,
29,
30,
31]. In [
22], the use of electric energy from fusion in transport in Europe is modeled. Work on controlled thermonuclear fusion is also carried out by technology start-ups, and some of them have achieved a stable fusion temperature of over 100 million degrees Celsius. Promising results were obtained by Magneto-Inertial Fusion Technologies Inc. (MIFTI) [
32] developing the STAGED Z-PINCH technology. For their research, they obtained a grant from the Advanced Research Projects Agency (ARPA) of the US Department of Energy. They cooperate with top research units in the USA. MIFTI scientists were the first in the world to obtain a 10
10 neutron flux. Large companies, such as Chevron, Eni, Equinor, Amazon, and Microsoft, are already investing in the fusion technology. China is a country that strongly invest the technology of controlled thermo-nuclear fusion and making significant progress. Additionally, the USA invests significantly in this technology. The Italian government has a strong interest in this topic. In turn, the British government has signed a contract with General Fusion UK [
33] under which the first commercial fusion reactor will be built by 2025. All this suggests that we are on the eve of a technological breakthrough and the commissioning of the first commercial fusion reactors, and this will be completed before 2030, and maybe even faster in the first half of the 2020s.
The first fusion reactors will not be 100% ecological due to the type of fuel used. The [
34] fusion reactions (1) and (2) are easier to obtain than reactions (3)–(5) due to the lower ignition temperature and higher cross-sections. It is almost certain that the first fusion reactors will use reactions (1) and (2), despite their many disadvantages, hence the name of the first generation fusion fuel. In the formulas (1–5),
1H is a single proton (the nucleus of a hydrogen atom), n is a neutron,
2H is deuterium (D), and
3H is tritium (T). Reactions (1) and (2) are neutronic, which means that neutrons are formed during their interaction. In classical nuclear reactors using fissile fuel, neutrons are captured by materials near the core, causing them to degrade. The flux of neutrons in fusion reactors will be higher than in classic fission reactors, causing faster degradation of the shields of these reactors and the necessity of their more frequent repairs, which will increase the costs. Moreover, secondary nuclear reactions, caused by the interaction of neutrons with the materials of which the reactor is made, generate radioactive materials. Energy production with the use of first-generation fusion fuels will not be fully clean and ecological, and, thus, will not be accepted by the international ecological community. The most problematic fuel will be (1) using tritium. Tritium is much more expensive (USD 30 billion per tonne) than the helium-3 isotope (
3He) (USD 16.6 billion per tonne) and the hardships of production. Its production for the purposes of fusion power will be carried out by “breeding” it in a fusion reactor. The emitted neutrons will react with the lithium blankets (
6Li) to give the helium-4 (
4He) isotope and tritium (
3H). The process is not 100% efficient and the multiplication factor for tritium atoms is 1.2. There are improved methods of blanket construction which also contain beryllium atoms whose nuclei allow duplication of neutrons and theoretically obtaining two tritium atoms from one nucleus. Every 3–4 years, tritium has to be scraped off the walls of the lithium blankets, which is associated with a complete renovation of the fusion reactor and downtime in its operation.
Boron
11B is widely available on Earth, as is hydrogen. The thermo-nuclear reaction (5) is aneutronic, which means that no neutrons are produced during this reaction. However, it is the most difficult fusion reaction to carry out of all the fusion reactions mentioned (1)–(5) and it requires the highest ignition temperature. Reaction (3) has an ignition temperature over four times as high as that of the (1) reaction, and correspondingly lower cross-sections, while the (5) reaction is nearly ten times more difficult to ignite and, therefore, the fuel for this reaction ranks among the fourth generation of fusion fuels. The start-up Marvel Fusions [
35] is working on the development of a technology that utilizes the thermonuclear reaction (5) using
11B.
The fusion reactions (3) and (4) are aneutronic, and the fuels necessary to carry them out are called second and third generation fusion fuels, respectively. The lack of neutron production during both reactions increases the life of the fusion reactor shields. Such fusion reactors can be smaller and less expensive to maintain. In both cases, electricity can be directly produced without the need for a working medium circulation and the associated heat exchangers and steam turbines. This increases the efficiency of such solutions. Reactors based on the fourth generation fusion fuel will be able to be small, compact, easier to build, and highly competitive with classical nuclear energy. An example of a start-up developing [
36] technologies based on reaction (3) is Helion Energy.
Second and third generation fusion fuels use the helium-3 (
3He) isotope, which is extremely rare on Earth. Moreover, the [
37] addition of 1% He-3 nuclei to the first generation fusion fuels increases the ion energy 10 times, which may be important for improving the economics of the first fusion reactors. It is [
38] documented that some volcanoes can emit helium-containing gases with concentrations of
3He ranging from 14 to 30 ppm. A similar concentration occurs in young basalt rocks. However, these deposits are difficult to exploit and are rather not large. The
3He isotope is also present in the Earth’s atmosphere, and at sea level its concentration is 7.27 ± 0.20 parts per trillion volumes. Exploitation of
3He from the air, as shown by research conducted in the 1940s and 1950s, is economically unprofitable. He
3 may [
38] also be acquired from helium extracted from natural gas. In this case, the separation process must be carried out at very low temperatures, usually below 2.18 K. World helium production in 2014 was around 20,000 tonnes per year with the average He
3 concentration of 0.2 ppm—this could have resulted in around 2 kg He
3 per year. The global He
3 production from the decay of tritium is around 20 kg.
The Moon is much more abundant in helium-3 (
3He). Since it has no atmosphere and its magnetic field is weak, it is not protected from the solar wind, as is the case with Earth. For billions of years, the solar wind carried helium onto the lunar surface, which also contained the isotope
3He. The average [
38] concentration of
3He in the lunar regolith does not exceed 20 ppb. This means that with a
3He concentration of 20 ppb, 150 tons of regolith would have to be processed to obtain 1 g of
3He. Scientists believe that there may be areas of higher concentration on the Moon. The results [
39,
40] of the Change-1 probe indicate that there may be regions with
3He concentrations of 80 ppb/m
2 and higher on the Moon. In conclusion, the development of cheap, clean, and ecological fusion energy requires the development of space mining and the commencement of the exploitation of helium-3 deposits on the Moon.
Space mining ceases to be a topic straight out of a sci-fi novel thanks to progress in rocket technology (cost decreasing), and begins to be a real business. This is possible thanks to the advances in rocket technology and the progressive reduction in the cost of launching payloads into space. The competition for space deposits takes place mainly between the USA, China, India, and Russia. The European Union has played a marginal role in this race so far. There is also fierce competition between the few start-ups from all over that are working on this topic. China [
41] is considering establishing an Earth–Moon space economic zone by 2050, with insiders expecting the zone to generate
$10 trillion a year. The US is the first country in the world to pass a space law. The USA is also [
42] the initiator of the international Artemis Accords agreement, which enables the establishment of Artemis Accords Non-Conflict Zones, where an entity from a signatory country of this agreement and having its infrastructure in this area obtains exclusive rights to economic activity. However, they do not obtain property rights in this area. As of June 2021, 12 countries [
42] have embraced the Artemis Accords: Australia, Brazil, Canada, Italy, Japan, Luxembourg, New Zealand, the Republic of Korea, Ukraine, the United Arab Emirates, the United Kingdom, and the United States. The second country to pass the space law is Luxembourg. The country is highly interested in the development of space mining. The Luxembourg Space Agency states in its official document [
43] that by 2045, from 845,000 to 1.8 million people will be working full-time in space mining.
The ideas for exploiting the helium-3 (
3He) isotope on the Moon are not new. Some of the past work on this subject are described in [
44]. There are several start-ups in the world dealing with this topic. In February 2021, space mining start-up Solar System Resources Corporation Sp. z o. o. and US Nuclear Corp. signed the first historic Letter of Intent [
45] for the delivery of 500 kg of the
3He isotope from the lunar deposits by 2028–2032. Subsequently, both companies signed a historic trade agreement establishing the Cis–Lunar (Moon–Earth) value chain and announced [
46,
47] the beginning of the space mining age, to further tighten their cooperation in June 2021 [
48]. Global nanosatellite company SatRevolution S. A. is already involved in the development of the aforementioned Cis–Lunar value chain. The company recently [
49,
50] together with Virgin Orbit launched two observation satellites STORK-4 and STORK-5 and plans to build a global mega constellation of REC observation satellites. Moreover, some of the metals necessary for the development of high-tech industries, which are much more common in space, are also starting to run out on Earth. The Astrorank website [
51] ranks known asteroids according to their estimated valuation. Space mining is slowly becoming a fact, and the 2020s promise to be very interesting. Future permanent bases on the Moon and Mars will give another impetus to the development of space mining. However, no detected space deposit will be exploited without first carrying out their accurate “in situ” geological surveying and sampling of the core samples for research. The history of the oil and mining industry shows that even initially very promising deposits may turn out to be economically unprofitable to exploit. Moreover, the prices of raw materials will also change over time. In order to be able to conduct an economically effective policy for the development and exploitation of individual space deposits, it is necessary to carefully identify them. As investments related to space mining will be always more risky than in the case of earth mining, there will be even greater emphasis on detailed surveying of space deposits.
The detailed “in situ” space deposits surveying cannot be performed without the use of drilling methods and the planning of many future space drilling missions. However, the drilling methods used on Earth cannot be directly translated into space applications. It is necessary to develop a new class of space devices that would combine the achievements of the drilling industry and the requirements imposed by the space environment, as well as the current state of development of the space industry.
2. Space Drilling Systems
Space drilling will be extremely important for the development of space mining and the assessment of space deposits. In the case of 3He isotope deposits, which are rather superficial, the drilling will not be deep, only a few meters. Space mining is the most pragmatic reason why we need space drilling missions. However, there are other reasons as well that drive research into these systems in the scientific community.
For centuries mankind has been interested in the nature of phenomena occurring in the sky. The development of knowledge about the Universe has raised discussion on the possibility of space exploration and extraterrestrial life. Previous space missions to the Solar System’s objects have not confirmed any possibility of extraterrestrial life. These results are not unexpected considering the unfriendly surface conditions, e.g., extremely high/low temperatures, space radiation, and lack of water in liquid state. Some scientists are convinced that underground conditions can be more friendly for primitive or even more complicated life forms. Extremophiles, bacteria living on the Earth in extreme environments, are a strong argument for the possibility of life on extraterrestrial objects in the Solar System. However, most scientists agree that life (even intelligent) on planets localized beyond the Solar System in the Circumstellar habitable zone is plausible. In this context studies of extraterrestrial underground formation are gaining in importance. The second reason for these studies, which is even more important from practical point of view, is the planned space exploration. Information about the water/ice and frozen gas content in the soil and its mechanical and geological properties are essential for base localization planning. For the future effective economic exploitation of extraterrestrial objects, the localization of mineral deposits and their geological history must be investigated. Moreover, the construction of large settlements and industrial facilities on the Moon and Mars will require many geological and geotechnical studies. For the first bases, their location is likely to be selected only on the basis of the results of previous space science missions. However, in the construction of large and commercial facilities and multi-billion commercial projects, business will expect to reduce the investment risk by carrying out many geological and geotechnical surveys.
Collecting all this information needs many coring operations performed by autonomous drilling rovers or drilling devices controlled by crew (in case of manned missions). The industrial practice on the Earth shows that effective, fast drilling needs heavy devices and equipment with high energy consumption. However, using such devices in space missions is not possible yet. The space industry has seen a significant reduction in payload costs. In 2021Q2, a small satellite up to 200 kg can be launched to low earth orbit (LEO) for USD 1 million (SpaceX Smallsat Rideshare Program). Such a low price is possible thanks to the sharing of missions by many companies. However, for deep space missions, such as to the surface of the Moon or Mars, the costs are still high. The cost of launching the Falcon 9 and Falcon Heavy rockets is USD 60 million and USD 90 million, respectively. If these values are divided by the payload, the theoretical cost of launching payload into Mars orbit can be calculated, which is 14,925 USD/kg and 5,357 USD/kg for the Falcon 9 and Falcon Heavy rockets, respectively. In the case of missions to the Moon or Mars, these missions are not shared and the service purchaser must pay the entire cost of launching the rocket. So far, there is no fully operational rocket that would land on the surface of the Moon or Mars. Landers are required, complicating the mission, increasing costs and reducing the useful cargo that can be delivered to the surface. The hope for the space industry is the built reusable Starship vehicle, which is to bring a price revolution and, according to Elon Musk’s announcement, enable the colonization of Mars. Thanks to the possibility of vertical landing on the Moon or Mars with up to 100 tons of cargo, it will be possible to carry out cheaper and logistically simpler missions, as well as to share them with other companies. However, even when this happens, the drilling devices launched into space for a long time will be far inferior in size and mass to their terrestrial counter-parts. When building drilling devices for future space missions, their mass and energy consumption will have to be minimized, although advances in the rocket technology mean that the limitations will be more and more relaxed. Moreover, not every place on the Moon or Mars will be possible to quickly reach with a manned mission that could last for many months. Drilling devices in space must have a high degree of autonomy and perform their tasks without human intervention.
Furthermore, the space drilling technology should differ from the one used on the Earth. The high cost of any excess cargo eliminates mud as the medium for cuttings removal, therefore another light system must be designed. Here, however, a number of problems have to be solved. Research on robotic drilling systems to be used for the future space missions is ongoing in a few science centers around the world. This type of research (exemplified in the references to this paper) is gaining in importance. Some of the works from the past and the current ones concerning drilling in space are described in publications [
52,
53,
54,
55,
56,
57,
58,
59,
60,
61,
62,
63,
64,
65] and in a book [
66].
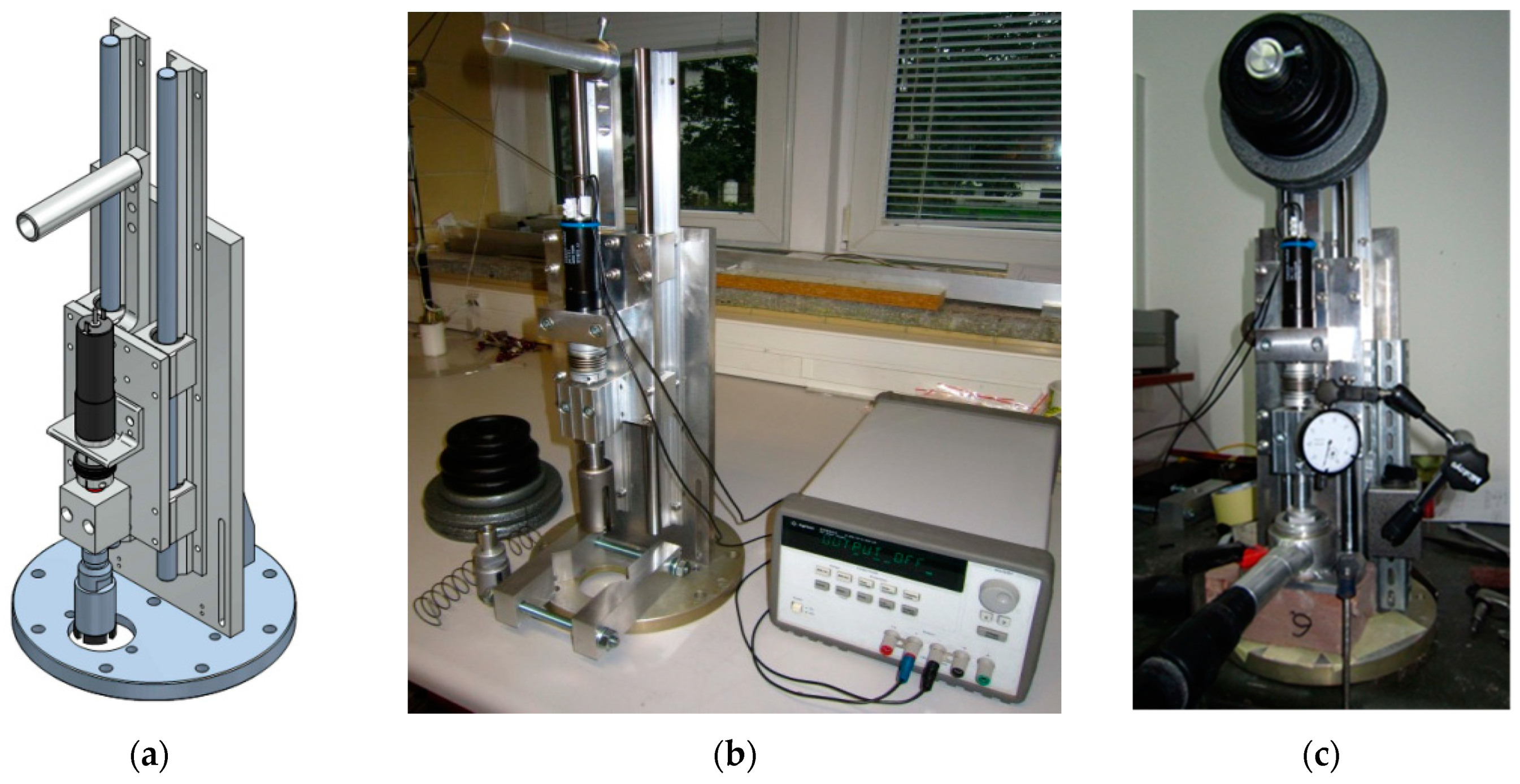
The consortium of the Space Research Centre of the Polish Academy of Sciences and AGH University of Science and Technology joined the research performing a project “Developing a model of automatic coring drilling machine to operate in extreme conditions, in particular in the space environment”, financed by The National Centre for Research and Development. The objective is to design and build an autonomous drilling robot with mass and power consumption under 10 kg and 100 W, respectively. An unmanned aerial vehicle (UAV) will be used to simulate the lander. To achieve this goal, first the possibility of drilling with small power consumption, low rotational speed of tool, small weight on bit (WOB) and without mud application should be investigated. For this purpose a test stand for performing initial drillability tests was designed.
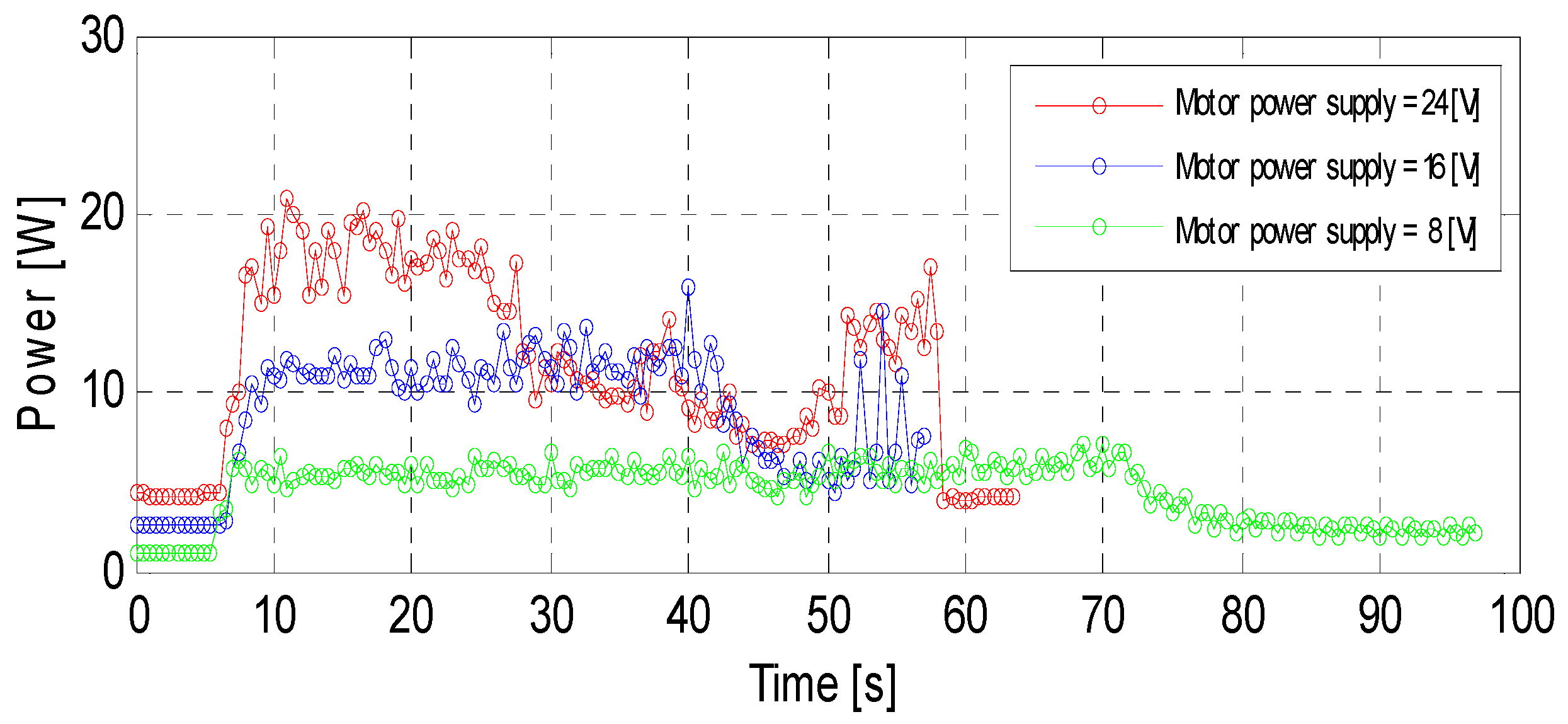
4. Results
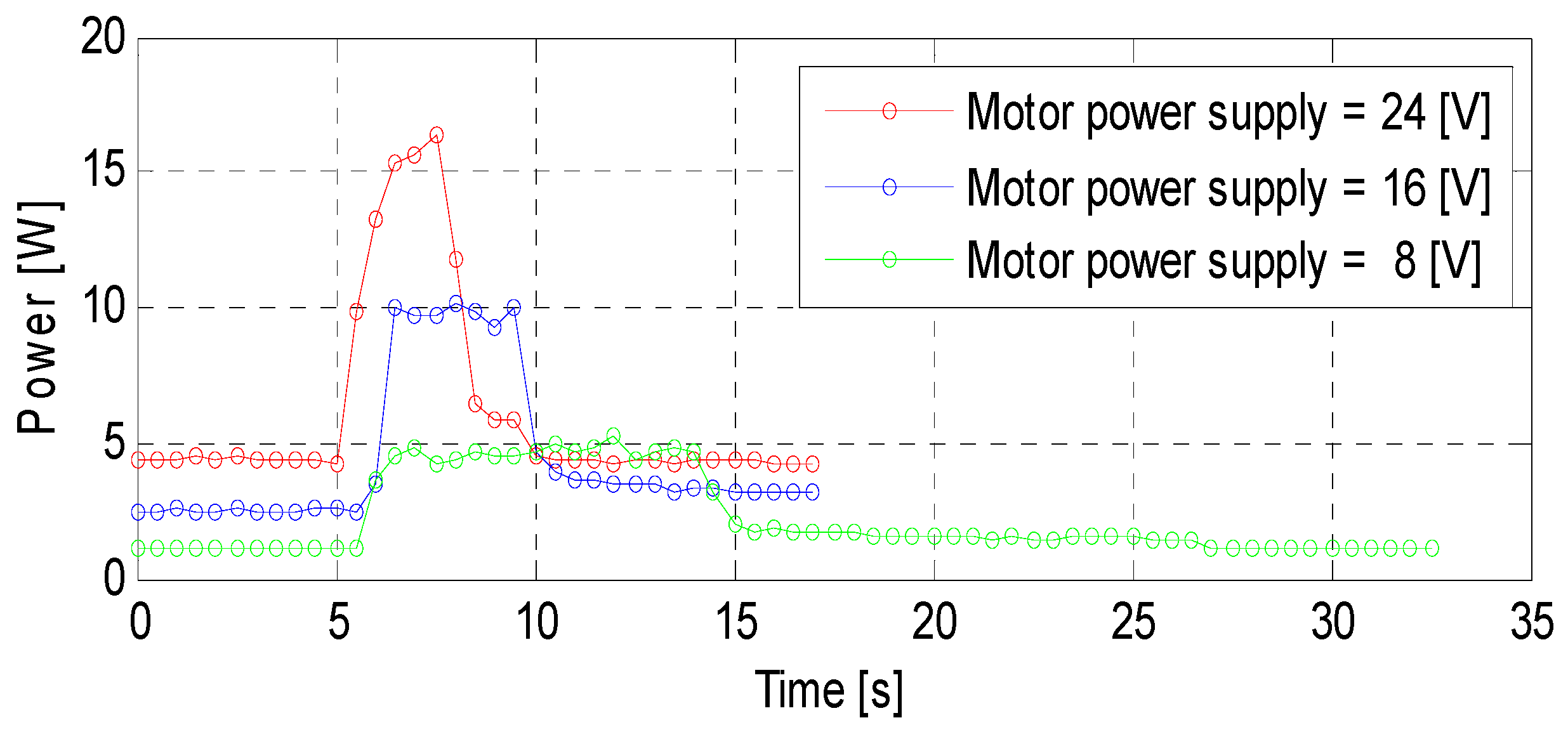
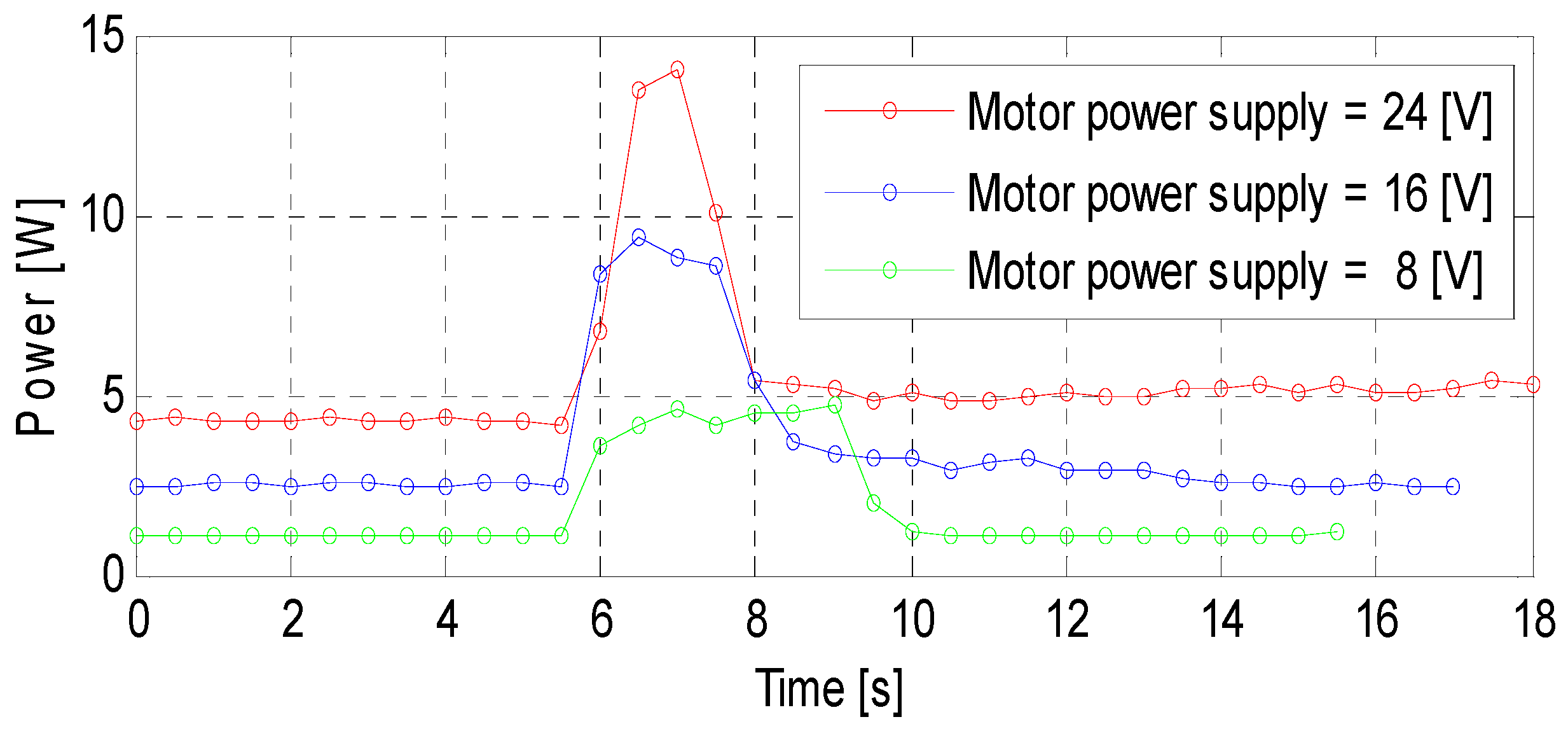
Tests were performed for eleven samples: (1) grey foamglas F; (2) black foamglas F; (3) white foamglas S; (4) Ytong (compression strength Rc = 6 MPa); (5) Szydłowiec sandstone A—soft; (6) Szydłowiec sandstone B—middle; (7) Szydłowiec sandstone C—hard; (8) massive reef limestone; (9) bituminous shale; (10) sandstone (core); (11) pudding stone. For the first two samples the drilling was performed with 24, 16, and 8 V motor power supply and a Makita coring bit. No external weights were applied, and the weight on bit (WOB) equaled to 27.27 N. Results were presented in
Figure 2 (sample 1) and
Figure 3 (sample 2). Peaks on both figures correspond to the drilling process. Sections preceding the peaks correspond to the initial phase when drilling process was not started yet and the tool was freely rotating in the air. In this phase power consumption was lower than while drilling. When drilling started the power consumption increased to drop down after some time. It was caused by the fact that cuttings were not removed from the hole (neither mud nor other fluid was used to remove the cuttings in the tests) and energy was wasted on its grinding. For the first sample and the 24, 16, 8 V motor power supply, the coring bit was moved into material at a depth of 55 mm in 3.8 s, 60 mm in 5 s, and 55 mm in 10 s, respectively. For the second sample and the 24, 16, 8 V motor power supply, the coring bit was moved into material at a depth of 55 mm in 2.3 s, 55 mm in 5 s, and 44 mm in 5.4 s, respectively. After reaching these depths, the tool was stopped by the upper face inside the coring bit, making further drilling impossible. The bit was moved quickly into both samples and it was not clear if it was caused by drilling or by pressing. Both materials were soft and 27.27 N weight on bit (WOB) was probably too high for them. After finishing drilling, the coring bit was removed from the material (freely rotating in the air). This phase was graphically represented by the end parts of the plots in
Figure 2 and
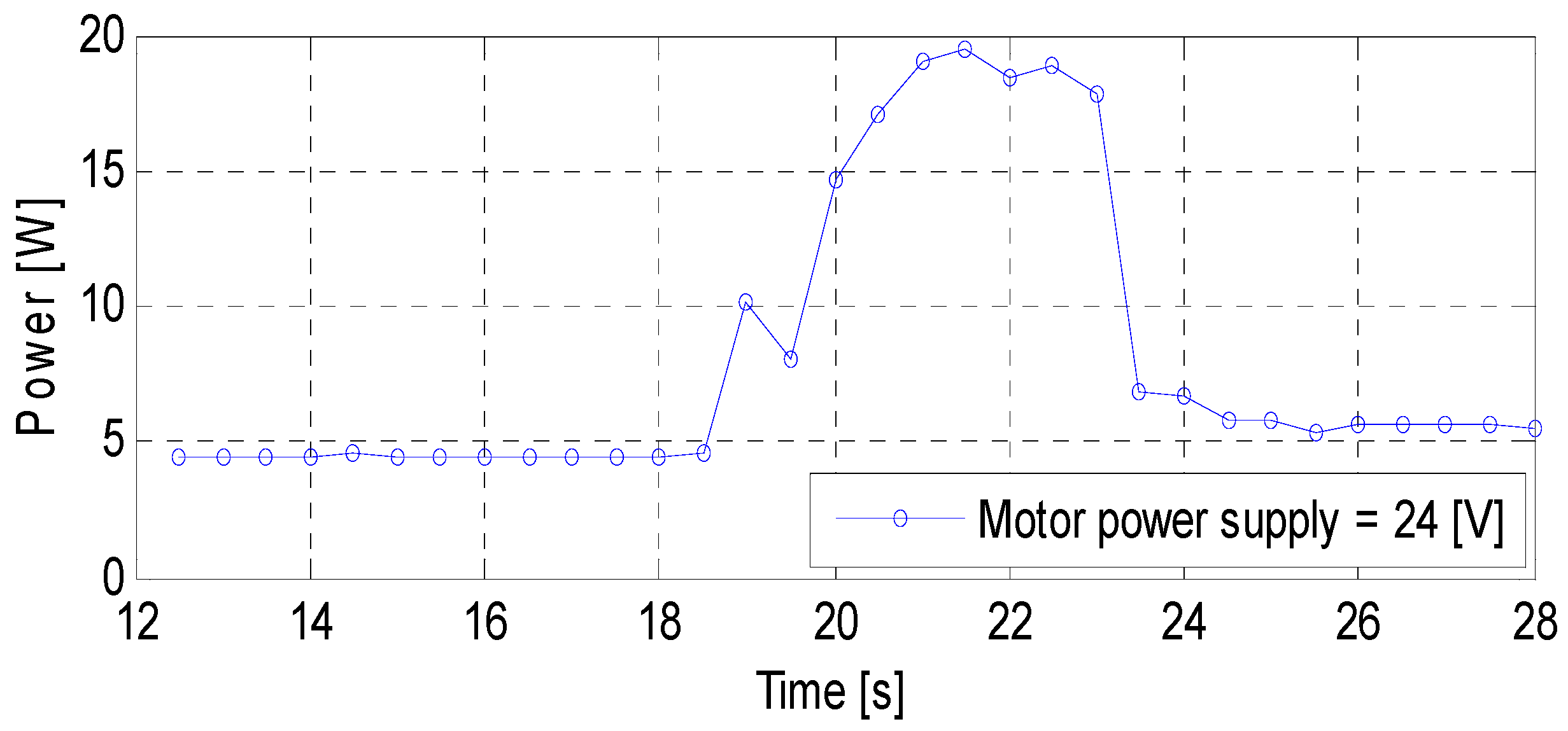
Figure 3. For sample 3, the same coring bit and value of WOB were applied. The test was performed only for 24 V motor power supply. Obtained results were similar to the previous two. Drilling depth 55 mm was reached after 6.4 s and the coring bit was stopped on its upper inside face. Results are presented in
Figure 4.
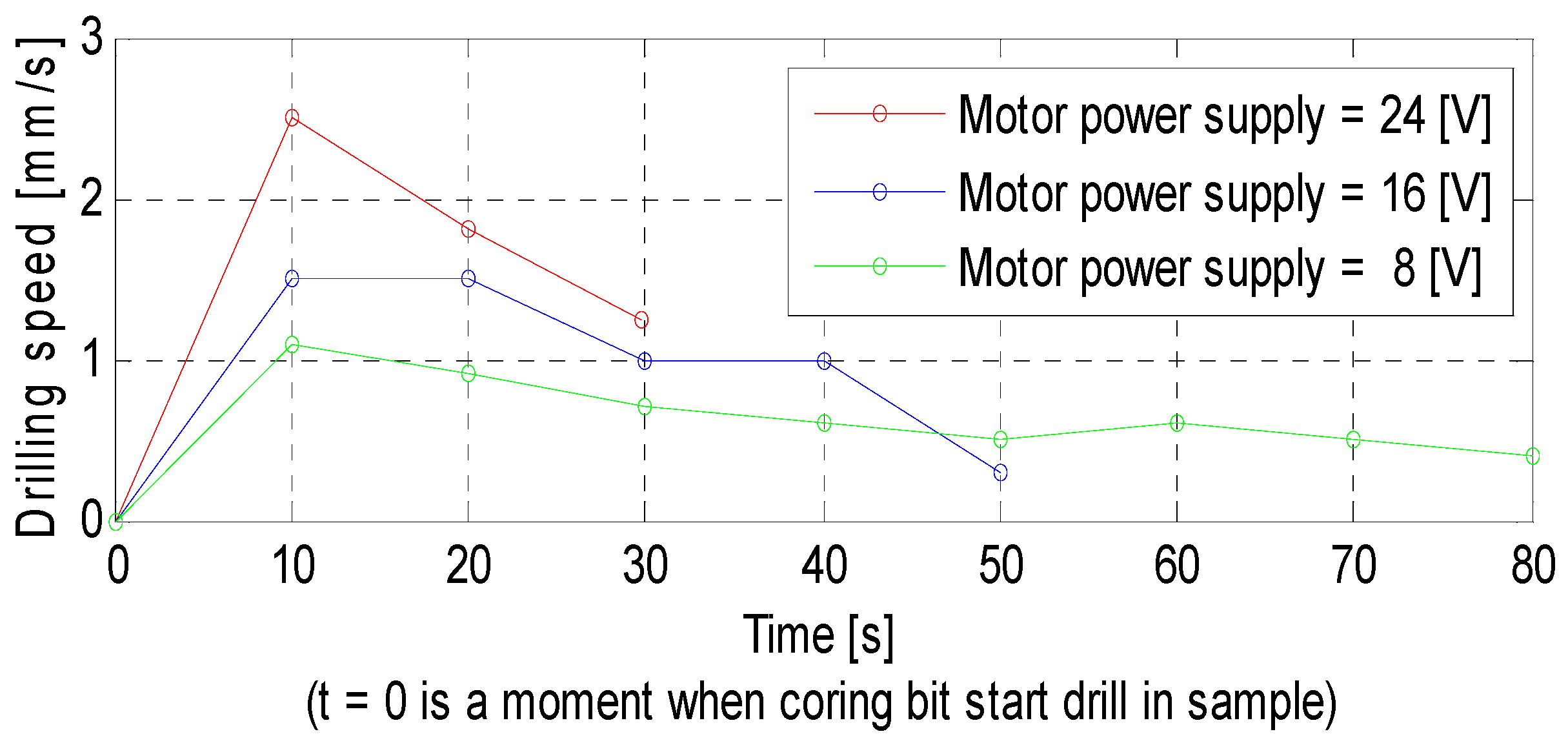
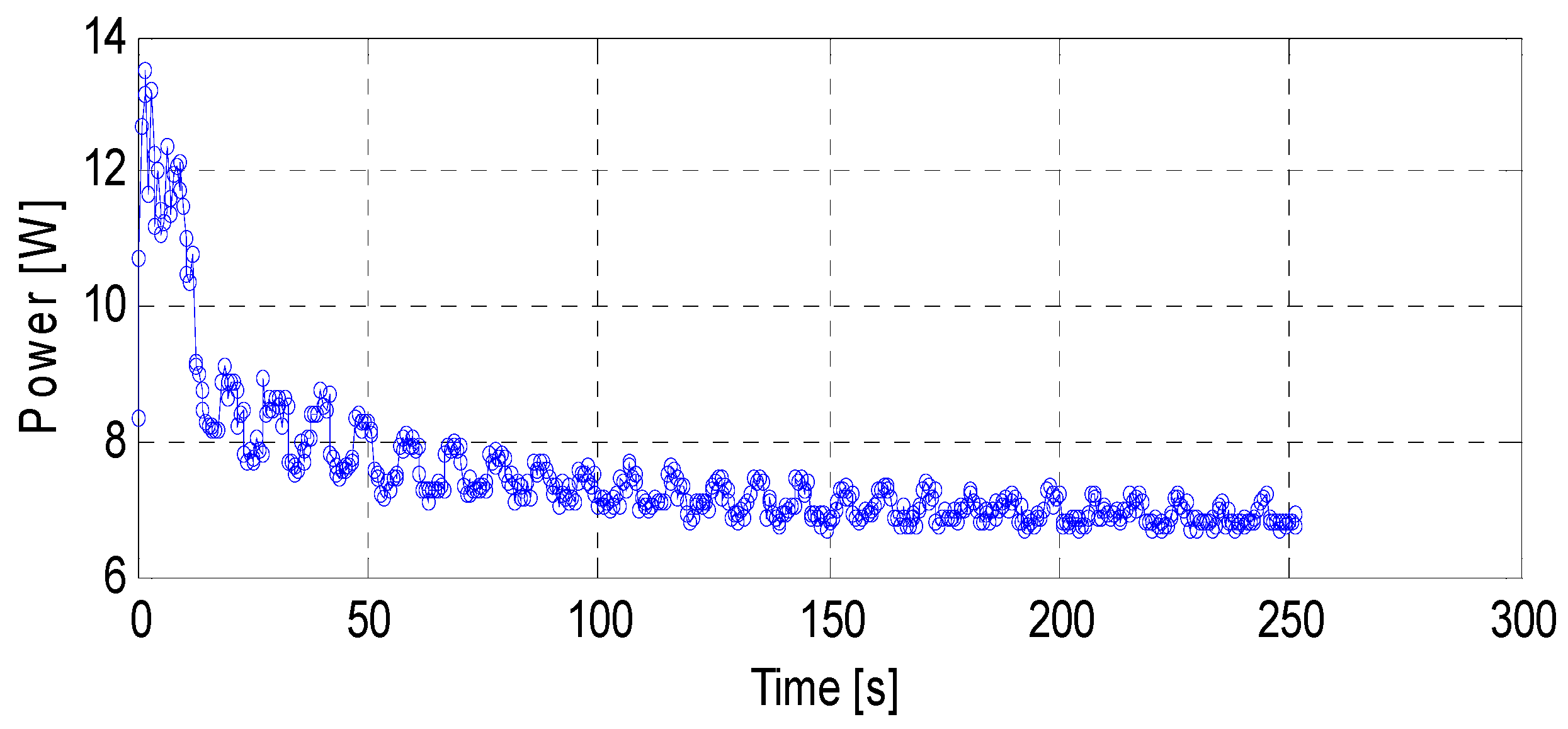
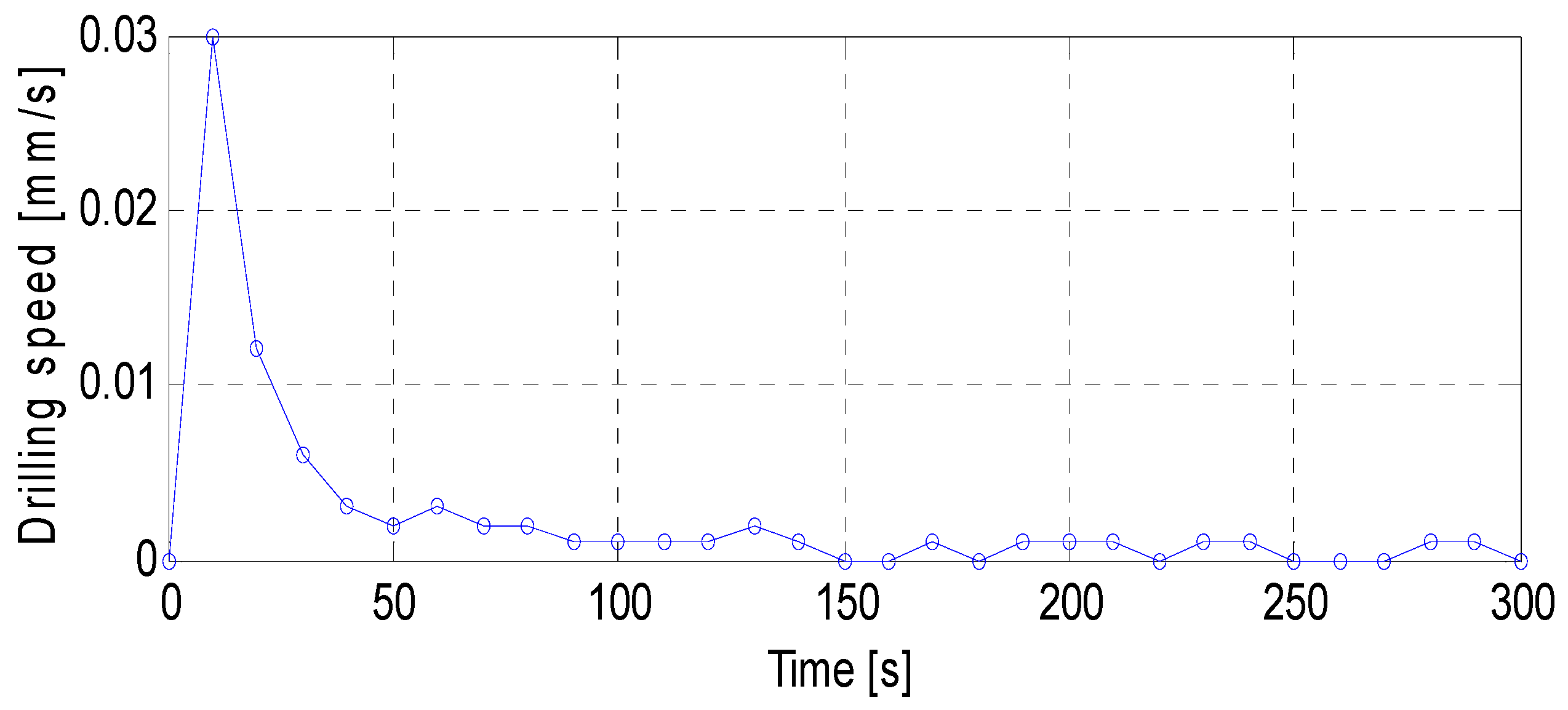
For sample 4, drillability tests were performed with the same Makita coring bit, 27.27 N weight on bit (WOB) and with motor power supply 24, 16, 8 V. Material was harder, drilling process a little slower, thanks to which the drilling speed could be measured. For 24, 16, 8 V motor power supply, the coring bit was moved into the material at a depth of 55 mm in 29.7 s, 53 mm in 50 s, and 53 mm in 80 s, respectively. After reaching specified depths, like in previous samples, the drilling process was hindered because the tool was stopped by the upper face inside the coring bit. Power consumption and drilling speed were presented in
Figure 5 and
Figure 6, respectively. In this sample, the effect of energy used on grinding non-removed cuttings is more visible. The drop of drilling speed caused by this effect can be observed in
Figure 6.
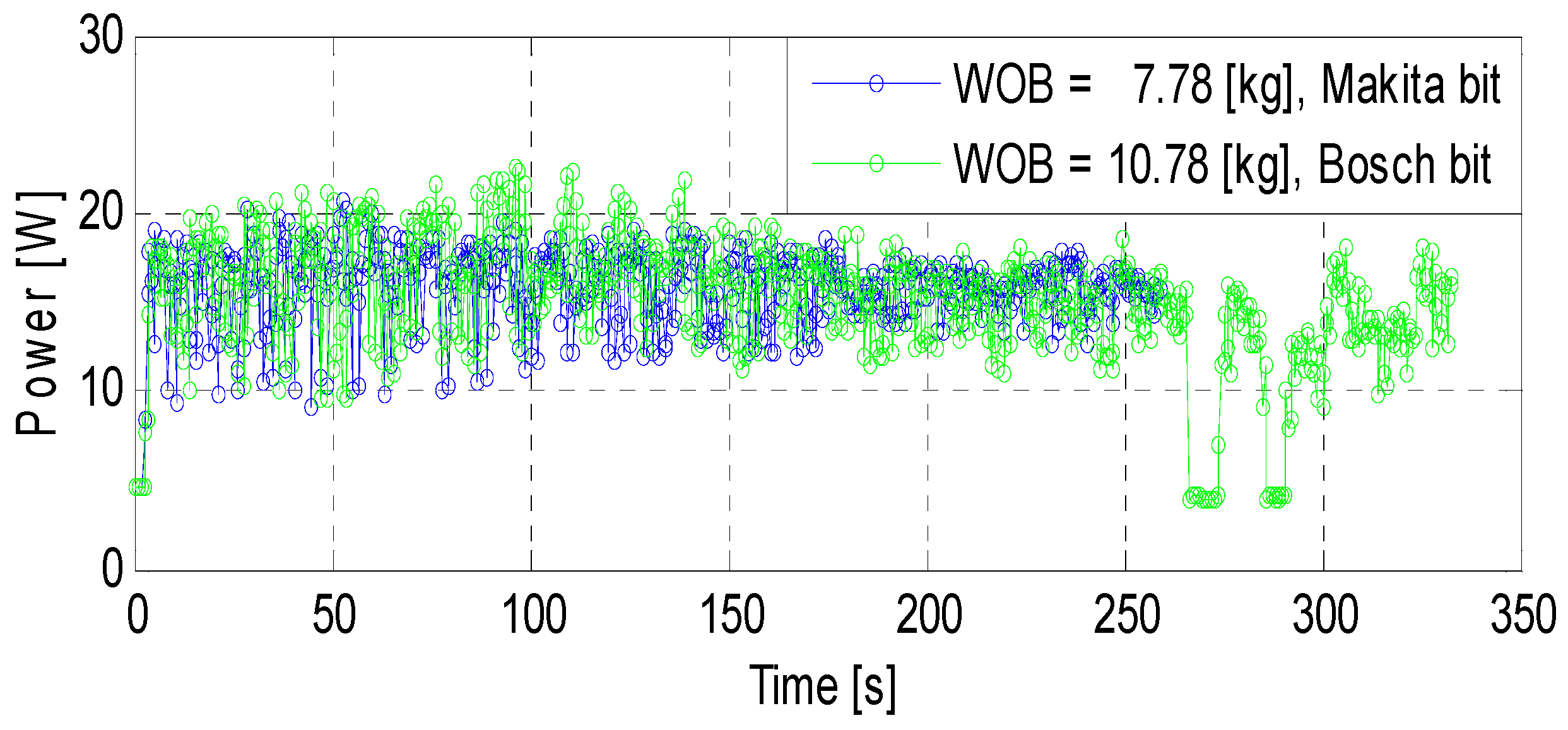
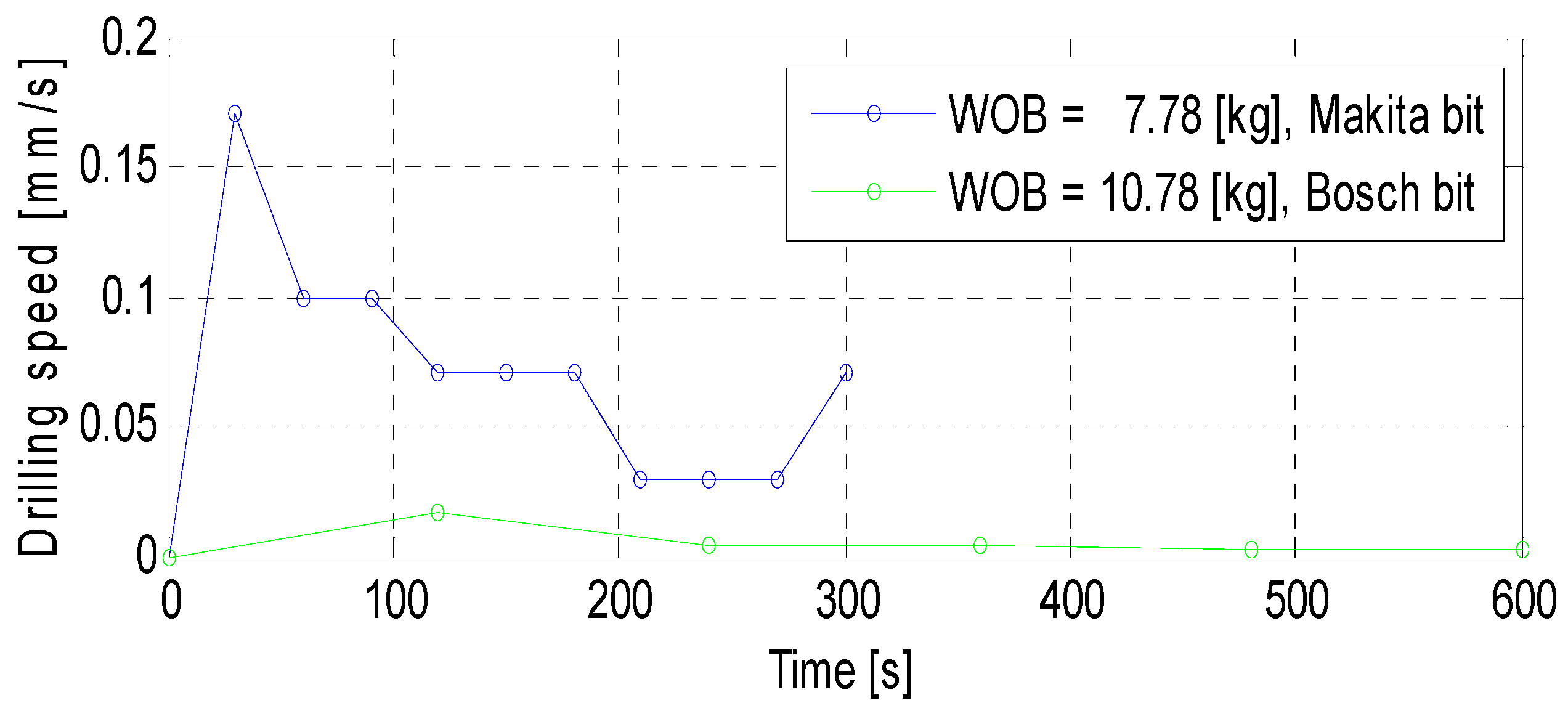
The same Makita coring bit was used for sample 5 in the first drillability test, analogous to the tests of previous samples. Higher weight on bit 76.32 N was applied. In this test the drilling depth of 22 mm was reached in 300 s. At this point the test was finished. During the test 2 Hz frequency and 2 mm magnitude axial vibrations were observed. Performing the test with a Makita coring bit and 105.75 N WOB was not possible. Cutting edges were dull and the test had to be interrupted after drilling 13 mm deep hole. During the first 90 s of the test at 3 Hz, 2 mm magnitude vibrations were observed. The test was continued with the use of a Bosch diamond coring bit. The drilling was started in a 13 mm cleaned hole drilled by the previous tool. No vibrations the of drilling tool were observed. The results of these two tests were presented in
Figure 7 and
Figure 8, illustrating power consumption and drilling speed, respectively. The accurate mechanism of vibrations observed while drilling sample 5 with a Makita coring bit was not investigated. Probably the main reason of uneven work was the increasing dullness of tool’s cutting edges. In addition, if the bottom of hole was equally cleaned from the cuttings, the vibrations of coring bit would be probably smaller. The effect of decreasing drilling speed caused the lack of cuttings removal mechanism, as visualized in
Figure 8. In the test making use of the Bosch coring bit, the tool reached a depth of 3.6 mm in 600 s. Such a small drilling speed was due to the lack of good cleaning of the hole from the cuttings. The stable, high power consumption was caused by frictional resistance of the coring bit matrix “killed” by the dust at the bottom of the hole. This kind of tools should operate at higher speeds and less surface of pressure to the rock should be involved. In all these tests for sample 5 the motor power supply was 24 V.
An additional drilling test was performed with a Bosch diamond coring bit, informally called the “Bosch test”. The purpose of this test was to investigate how the lack of cleaning of the hole from cuttings may affect the speed of drilling. The 10 s cycles were repeated for 300 s as a result of which the hole was cleaned. Then, the drilling started. The 105.75 N weight on bit (WOB) and the motor power supply 24 V were used in the test. The results are presented in
Figure 9 (power consumption) and in
Figure 10 (drilling speed). These figures illustrate the decreasing speed of drilling. A hole 0.75 mm deep was drilled in 300 s. The decrease in drilling speed and power consumption were caused by contamination which glued to the coring bit matrix after performed over half of the hole depth in 60 s (depth 0.51 mm).
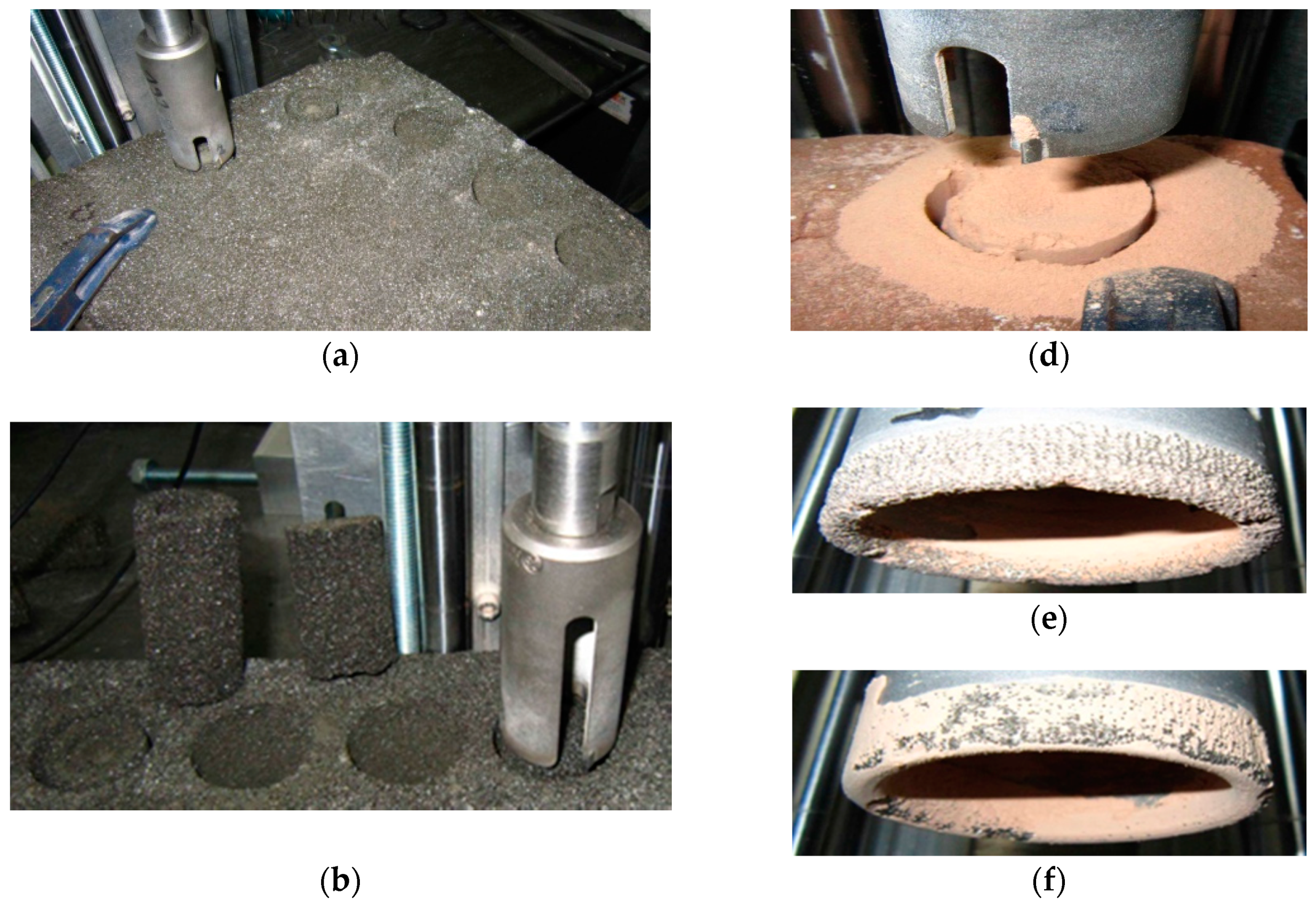
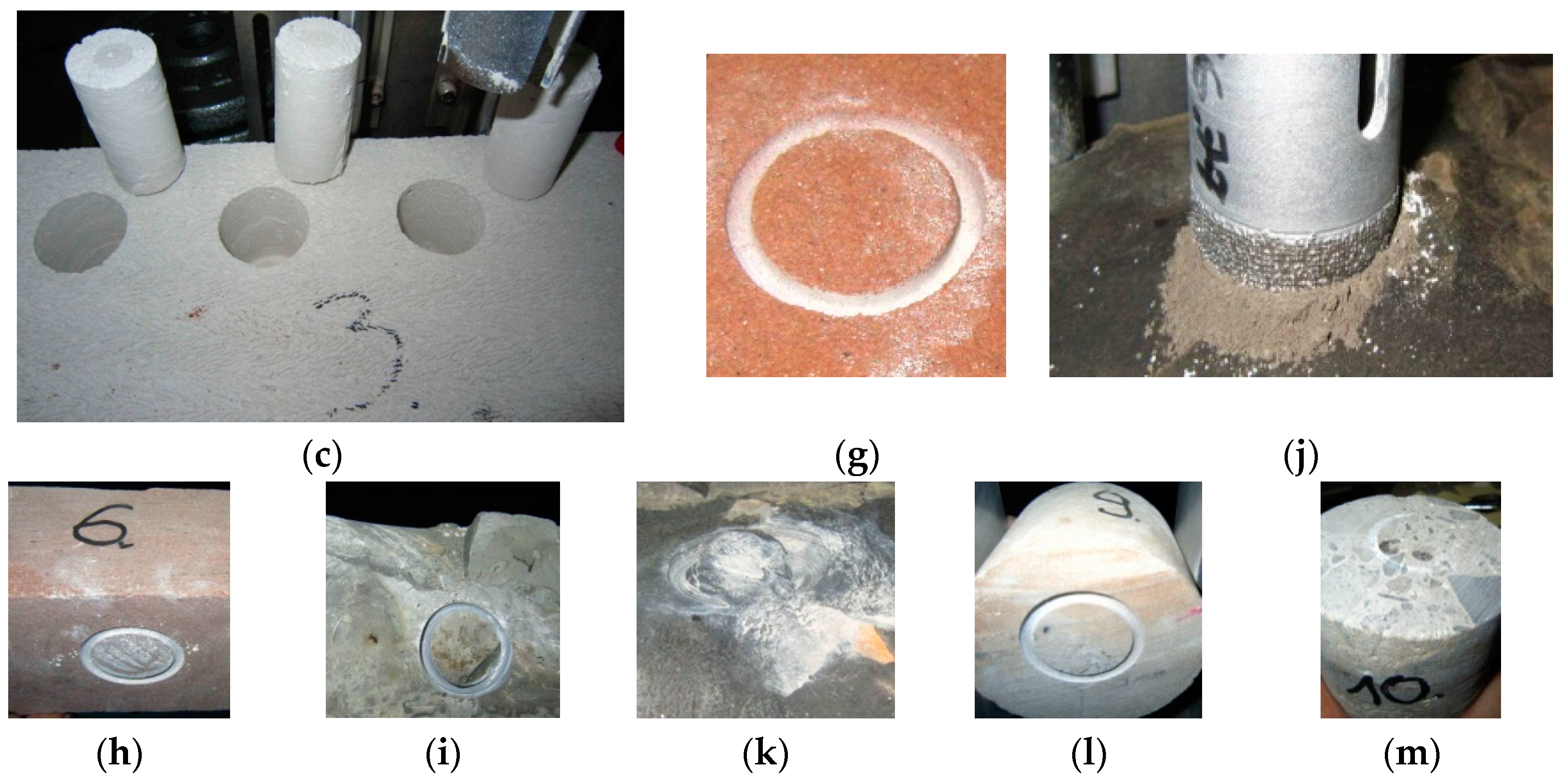
Figure 11e,f represents the Bosch diamond coring bit where the matrix was stuck with contaminations. This test shows that diamonds tools necessary can be used if an effective mechanism of cutting removal is provided to protect the tool matrix from “killing” by the contaminations. In application which do not use mud or other fluid it will be difficult to satisfy these conditions.
The drillability tests were also performed for samples 6 to 11. However, these samples were harder and the obtained drilling speed was very low. The selected method for measuring drilling depth did not allow to collect numeric data. A more precise measurement device than the dial indicator is needed. All these tests make use of 105.75 N weight on bit (WOB) and 24 V motor power supply. The highest depth obtained for sample 6 was 3.7 mm after 180 s, sample 9 was 10 mm after 600 s, sample 10 was 1.4 mm after 600 s, sample 11 was 0.4 mm after 420 s. For samples 7, 8 drilling was proceeded but its speed was too small—measurement of drilling depth utilizing dial indicator (used in experiment) was not possible. For samples 6–11 energy consumption during drilling process did not exceed 25 W. Only for sample 10 when weight on bit was instantaneously manually increased over 105.75 N but no more than 147.15 N, power consumption for this time was 36 W.
The drillability tests were also made for harder samples than these eleven investigated ones. However, due to the small drilling speed for softer samples and inability to collect accurate numeric data, these samples were not ultimately used.
Figure 11 represents a visible effect of drilling in eleven investigated samples.

 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}