
A New Approach for Satellite-Based Probabilistic Solar Forecasting with Cloud Motion Vectors

 , , , and
, , , and
Abstract
:1. Introduction
2. Proposed CMV-Based Probabilistic Approach
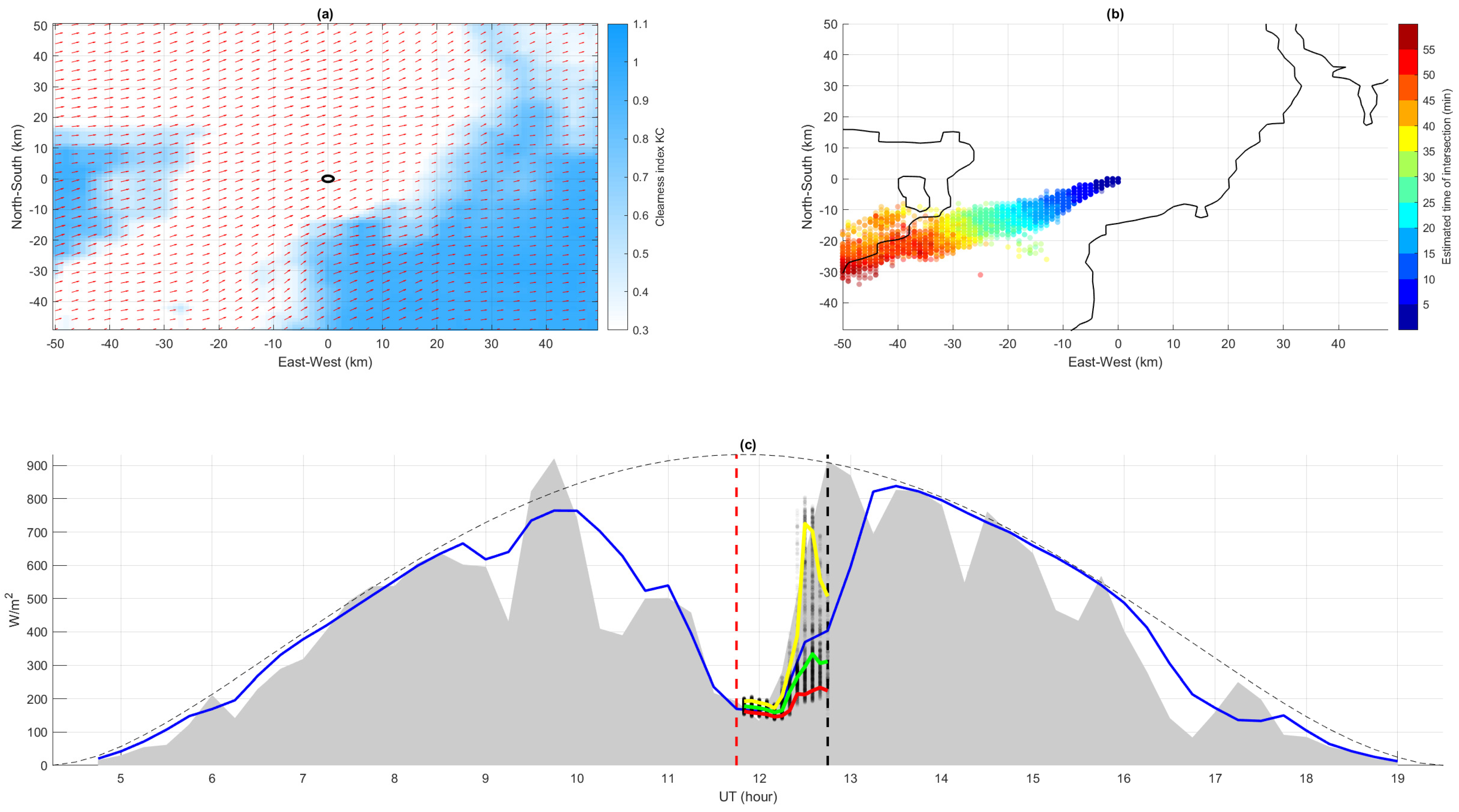
- calculation of the clear-sky index for each pixel of a given satellite sub-image, centered at the location of interest with a radius of typically 50 km to 100 km; n this paper, a radius of roughly 50 km is used;
- estimation of the Cloud Motion Vectors (CMV) using an approach of Optical Flow (OF);
- identification of the pixels that are likely to advect to the location of interest for different time horizons (named hereinafter upcoming or converging pixels or values); and
- building of the Probability Distribution Function (PDF) of the upcoming based on the candidate pixels.
2.1. Calculation of the Clear-Sky Index
2.2. Identification of the Cloud Motion Vectors
2.3. Identification of the Candidate Pixels
- a standard deviation of 2 km/h for the Gaussian noise added to the cloud speed (), which is roughly one order of magnitude lower than the typical wind speed in the lower atmosphere (a few dozen km/h);
- a standard deviation of radians for the Gaussian noise added to the cloud direction (); significantly higher values were considered, as to represent the difficulty in accurately estimating a CMV and the fact that it varies over time (which the Eulerian approach here used disregards), but larger values resulted in the loss of all information regarding trajectories (i.e., considerably worse sharpness values); and
- a monitoring radius of 1 km, intentionally lower than the 3 km satellite resolution; larger values increase the number of selected candidates (with the new ones being farther from the sensor location), which would then describe a variability that is less similar to that of a point sensor.
2.4. Building of the Empirical Distribution of the Clear-Sky Index
3. Performance Assessment
- The proposed probabilistic CMV approach is noted Pr-CMV.
- We can also provide deterministic forecasts using the Pr-CMV, by taking the median of the forecast distribution as the deterministic forecast. This method of obtaining deterministic forecasts is noted Pr-CMV-Det.
- A standard CMV approach with no Monte-Carlo procedure noted St-CMV. With this method, the motion vectors are propagated assuming an Eulerian approach to estimate the upcoming GHI map for the next time step.
- Two baseline models that make no use of satellite information: the Smart Persistence model noted persistence, for deterministic evaluation, and the Complete-History Persistence Ensemble noted CH-PeEn, for probabilistic evaluation. These models are defined in Section 3.2.
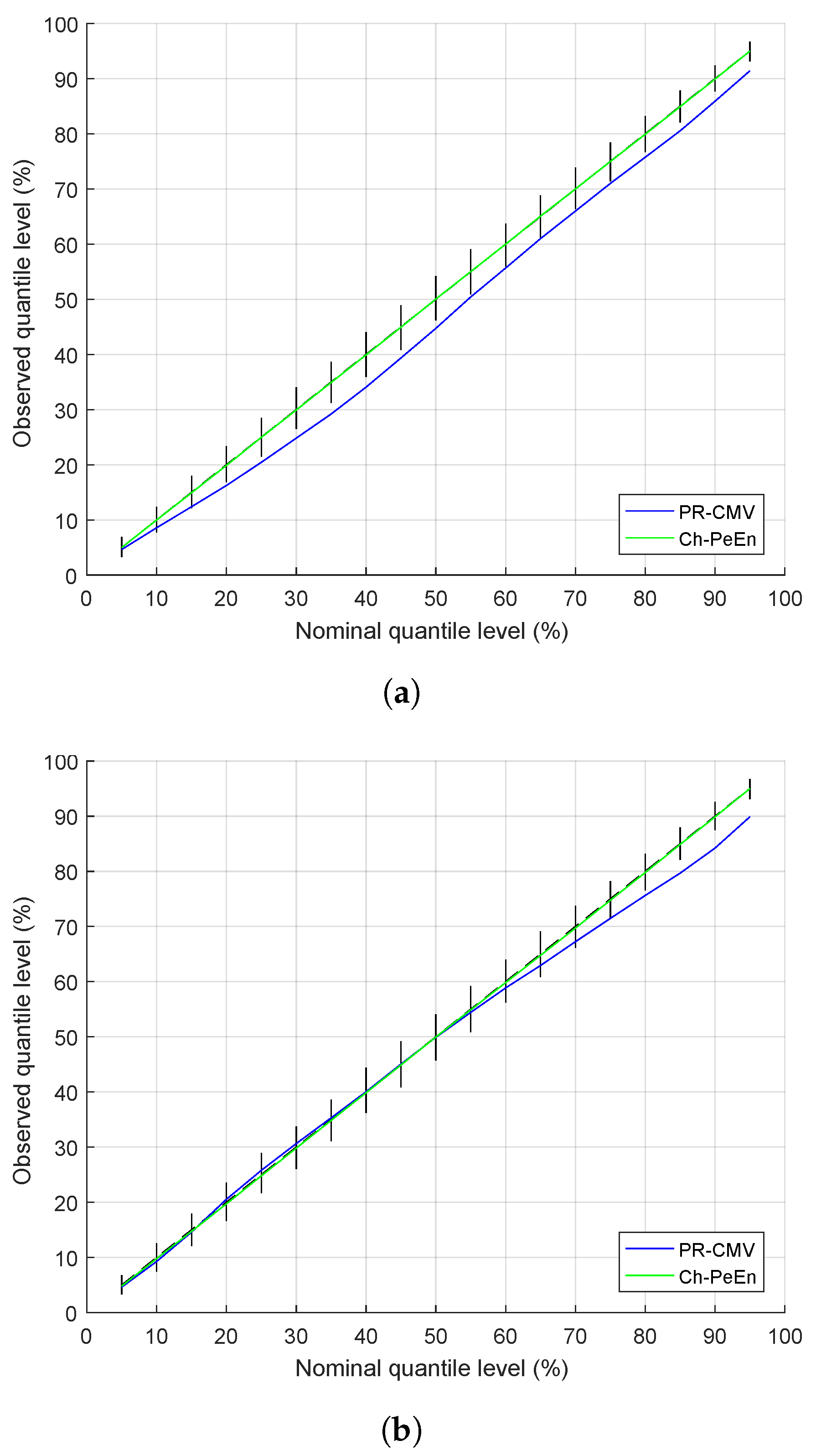
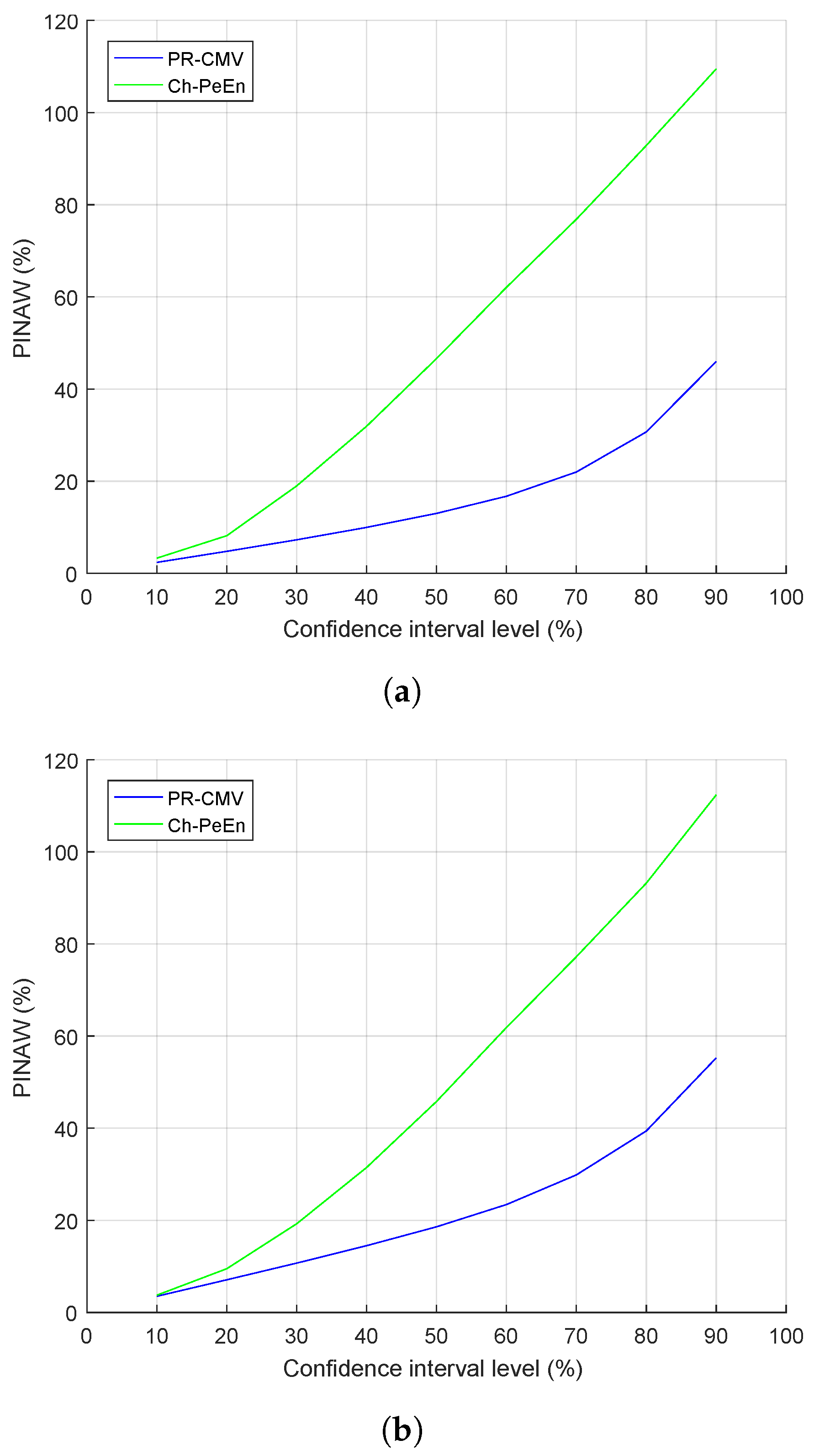
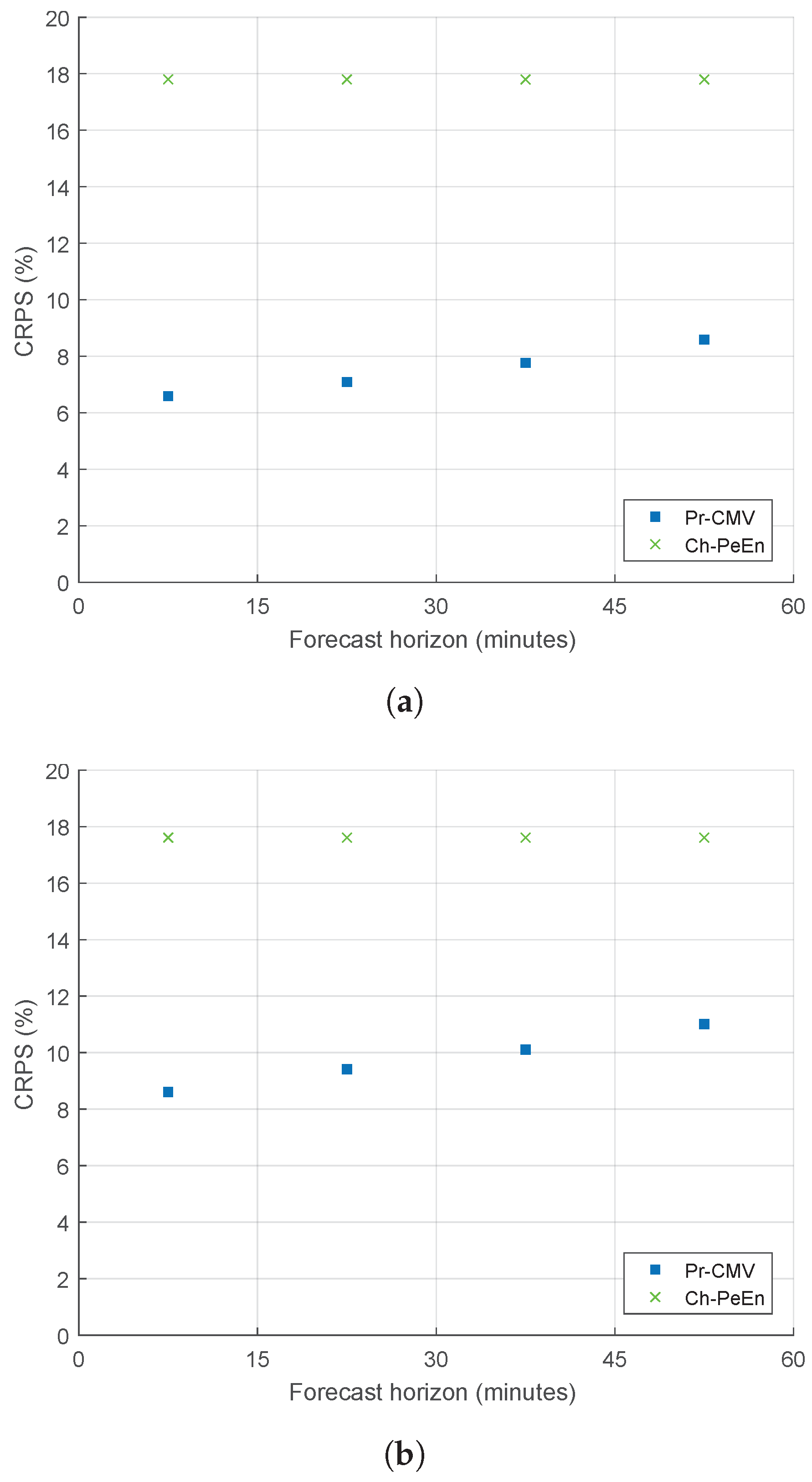
3.1. Metrics
3.2. Baseline Models
3.3. Data
3.4. Deterministic Performance
3.5. Probabilistic Performance
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| CDF | Cumulative Distribution Function |
| CMV | Cloud Motion Vectors |
| CRPS | Continuous Ranked Probability Score |
| GHI | Global Horizontal Irradiance |
| MPINAW | Mean Prediction Interval Normalized Average Width |
| MRD | Mean Reliability Deviation |
| nBIAS | Normalized bias |
| nMAE | Normalized Mean Absolute Error |
| nRMSE | Normalized Root Mean Square Error |
| OF | Optical Flow |
| PINAW | Prediction Interval Normalized Average Width |
| Pr-CMV | The proposed probabilistic CMV-based solar forecasting |
| Det-Pr-CMV | The deterministic mode of the Pr-CMV |
| PV | Photovoltaic |
| SSI | Surface Solar Irradiance |
| St-CMV | Standard CMV-based solar forecasting |
References
- Wu, J.; Botterud, A.; Mills, A.; Zhou, Z.; Hodge, B.M.; Heaney, M. Integrating solar PV (photovoltaics) in utility system operations: Analytical framework and Arizona case study. Energy 2015, 85, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Notton, G.; Nivet, M.L.; Voyant, C.; Paoli, C.; Darras, C.; Motte, F.; Fouilloy, A. Intermittent and stochastic character of renewable energy sources: Consequences, cost of intermittence and benefit of forecasting. Renew. Sustain. Energy Rev. 2018, 87, 96–105. [Google Scholar] [CrossRef]
- Litjens, G.; Worrell, E.; van Sark, W. Assessment of forecasting methods on performance of photovoltaic-battery systems. Appl. Energy 2018, 221, 358–373. [Google Scholar] [CrossRef]
- Masa-Bote, D.; Castillo-Cagigal, M.; Matallanas, E.; Caamaño-Martín, E.; Gutiérrez, A.; Monasterio-Huelín, F.; Jiménez-Leube, J. Improving photovoltaics grid integration through short time forecasting and self-consumption. Appl. Energy 2014, 125, 103–113. [Google Scholar] [CrossRef] [Green Version]
- Antonanzas, J.; Pozo-Vázquez, D.; Fernandez-Jimenez, L.; Martinez-de Pison, F. The value of day-ahead forecasting for photovoltaics in the Spanish electricity market. Sol. Energy 2017, 158, 140–146. [Google Scholar] [CrossRef]
- Martinez-Anido, C.B.; Botor, B.; Florita, A.R.; Draxl, C.; Lu, S.; Hamann, H.F.; Hodge, B.M. The value of day-ahead solar power forecasting improvement. Sol. Energy 2016, 129, 192–203. [Google Scholar] [CrossRef] [Green Version]
- Bessa, R.J.; Möhrlen, C.; Fundel, V.; Siefert, M.; Browell, J.; Haglund El Gaidi, S.; Hodge, B.M.; Cali, U.; Kariniotakis, G. Towards improved understanding of the applicability of uncertainty forecasts in the electric power industry. Energies 2017, 10, 1402. [Google Scholar] [CrossRef]
- Li, B.; Zhang, J. A review on the integration of probabilistic solar forecasting in power systems. Sol. Energy 2020, 207, 777–795. [Google Scholar]
- Camal, S.; Michiorri, A.; Kariniotakis, G. Optimal offer of automatic frequency restoration reserve from a combined PV/wind virtual power plant. IEEE Trans. Power Syst. 2018, 33, 6155–6170. [Google Scholar] [CrossRef] [Green Version]
- Reise, C.; Müller, B.; Moser, D.; Belluardo, G.; Ingenhoven, P. Uncertainties in PV System Yield Predictions and Assessments. IEA-PVPS Report IEA-PVPS T13-12. 2018. Available online: https://iea-pvps.org/wp-content/uploads/2020/01/Uncertainties_in_PV_System_Yield_Predictions_and_Assessments_by_Task_13.pdf (accessed on 6 August 2021).
- Grover-Silva, E.; Heleno, M.; Mashayekh, S.; Cardoso, G.; Girard, R.; Kariniotakis, G. A stochastic optimal power flow for scheduling flexible resources in microgrids operation. Appl. Energy 2018, 229, 201–208. [Google Scholar] [CrossRef] [Green Version]
- Furukakoi, M.; Adewuyi, O.B.; Matayoshi, H.; Howlader, A.M.; Senjyu, T. Multi objective unit commitment with voltage stability and PV uncertainty. Appl. Energy 2018, 228, 618–623. [Google Scholar] [CrossRef]
- Zamo, M.; Mestre, O.; Arbogast, P.; Pannekoucke, O. A benchmark of statistical regression methods for short-term forecasting of photovoltaic electricity production. Part II: Probabilistic forecast of daily production. Sol. Energy 2014, 105, 804–816. [Google Scholar] [CrossRef]
- Doubleday, K.; Hernandez, V.V.S.; Hodge, B.M. Benchmark probabilistic solar forecasts: Characteristics and recommendations. Sol. Energy 2020, 206, 52–67. [Google Scholar] [CrossRef]
- Yang, D.; van der Meer, D.; Munkhammar, J. Probabilistic solar forecasting benchmarks on a standardized dataset at Folsom, California. Sol. Energy 2020, 206, 628–639. [Google Scholar] [CrossRef]
- Lauret, P.; David, M.; Pinson, P. Verification of solar irradiance probabilistic forecasts. Sol. Energy 2019, 194, 254–271. [Google Scholar] [CrossRef] [Green Version]
- Mills, A.; Ahlstrom, M.; Brower, M.; Ellis, A.; George, R.; Hoff, T.; Kroposki, B.; Lenox, C.; Miller, N.; Milligan, M.; et al. Dark shadows. IEEE Power Energy Mag. 2011, 9, 33–41. [Google Scholar] [CrossRef] [Green Version]
- Yang, D.; Kleissl, J.; Gueymard, C.A.; Pedro, H.T.; Coimbra, C.F. History and trends in solar irradiance and PV power forecasting: A preliminary assessment and review using text mining. Sol. Energy 2018, 168, 60–101. [Google Scholar] [CrossRef]
- Mellit, A.; Massi Pavan, A.; Ogliari, E.; Leva, S.; Lughi, V. Advanced Methods for Photovoltaic Output Power Forecasting: A Review. Appl. Sci. 2020, 10, 487. [Google Scholar] [CrossRef] [Green Version]
- Diagne, H.M.; Lauret, P.; David, M. Solar irradiation forecasting: State-of-the-art and proposition for future developments for small-scale insular grids. In Proceedings of the WREF 2012-World Renewable Energy Forum, Denver, CO, USA, 13–17 May 2012. [Google Scholar]
- Van der Meer, D.W.; Widén, J.; Munkhammar, J. Review on probabilistic forecasting of photovoltaic power production and electricity consumption. Renew. Sustain. Energy Rev. 2018, 81, 1484–1512. [Google Scholar] [CrossRef]
- Grantham, A.; Gel, Y.R.; Boland, J. Nonparametric short-term probabilistic forecasting for solar radiation. Sol. Energy 2016, 133, 465–475. [Google Scholar] [CrossRef]
- Torregrossa, D.; Le Boudec, J.Y.; Paolone, M. Model-free computation of ultra-short-term prediction intervals of solar irradiance. Sol. Energy 2016, 124, 57–67. [Google Scholar] [CrossRef]
- Golestaneh, F.; Pinson, P.; Gooi, H.B. Very short-term nonparametric probabilistic forecasting of renewable energy generation—With application to solar energy. IEEE Trans. Power Syst. 2016, 31, 3850–3863. [Google Scholar] [CrossRef] [Green Version]
- David, M.; Ramahatana, F.; Trombe, P.J.; Lauret, P. Probabilistic forecasting of the solar irradiance with recursive ARMA and GARCH models. Sol. Energy 2016, 133, 55–72. [Google Scholar] [CrossRef] [Green Version]
- David, M.; Luis, M.A.; Lauret, P. Comparison of intraday probabilistic forecasting of solar irradiance using only endogenous data. Int. J. Forecast. 2018, 34, 529–547. [Google Scholar] [CrossRef]
- Munkhammar, J.; van der Meer, D.; Widén, J. Probabilistic forecasting of high-resolution clear-sky index time-series using a Markov-chain mixture distribution model. Sol. Energy 2019, 184, 688–695. [Google Scholar] [CrossRef]
- Boland, J. Spatial-temporal forecasting of solar radiation. Renew. Energy 2015, 75, 607–616. [Google Scholar] [CrossRef]
- Agoua, X.G.; Girard, R.; Kariniotakis, G. Probabilistic models for spatio-temporal photovoltaic power forecasting. IEEE Trans. Sustain. Energy 2018, 10, 780–789. [Google Scholar] [CrossRef] [Green Version]
- Bessa, R.J.; Trindade, A.; Silva, C.S.; Miranda, V. Probabilistic solar power forecasting in smart grids using distributed information. Int. J. Electr. Power Energy Syst. 2015, 72, 16–23. [Google Scholar] [CrossRef] [Green Version]
- Pierro, M.; De Felice, M.; Maggioni, E.; Moser, D.; Perotto, A.; Spada, F.; Cornaro, C. Data-driven upscaling methods for regional photovoltaic power estimation and forecast using satellite and numerical weather prediction data. Sol. Energy 2017, 158, 1026–1038. [Google Scholar] [CrossRef]
- Song, H.; Kim, G.; Kim, M.; Kim, Y. Short-Term Forecasting of Photovoltaic Power Integrating Multi-Temporal Meteorological Satellite Imagery in Deep Neural Network. In Proceedings of the 2019 IEEE PES Asia-Pacific Power and Energy Engineering Conference (APPEEC), Macao, China, 1–4 December 2019; pp. 1–5. [Google Scholar]
- Carriere, T.; Vernay, C.; Pitaval, S.; Kariniotakis, G. A novel approach for seamless probabilistic photovoltaic power forecasting covering multiple time frames. IEEE Trans. Smart Grid 2019, 11, 2281–2292. [Google Scholar] [CrossRef] [Green Version]
- Alonso-Suárez, R.; David, M.; Branco, V.; Lauret, P. Intra-day solar probabilistic forecasts including local short-term variability and satellite information. Renew. Energy 2020, 158, 554–573. [Google Scholar] [CrossRef]
- Bilionis, I.; Constantinescu, E.M.; Anitescu, M. Data-driven model for solar irradiation based on satellite observations. Sol. Energy 2014, 110, 22–38. [Google Scholar] [CrossRef] [Green Version]
- Hammer, A.; Heinemann, D.; Hoyer, C.; Kuhlemann, R.; Lorenz, E.; Müller, R.; Beyer, H.G. Solar energy assessment using remote sensing technologies. Remote Sens. Environ. 2003, 86, 423–432. [Google Scholar] [CrossRef]
- Jang, H.S.; Bae, K.Y.; Park, H.S.; Sung, D.K. Solar power prediction based on satellite images and support vector machine. IEEE Trans. Sustain. Energy 2016, 7, 1255–1263. [Google Scholar] [CrossRef]
- Cros, S.; Badosa, J.; Szantaï, A.; Haeffelin, M. Reliability Predictors for Solar Irradiance Satellite-Based Forecast. Energies 2020, 13, 5566. [Google Scholar] [CrossRef]
- Lorenz, E.; Kühnert, J.; Wolff, B.; Hammer, A.; Kramer, O.; Heinemann, D. PV power predictions on different spatial and temporal scales integrating PV measurements, satellite data and numerical weather predictions. In Proceedings of the 29th European Photovoltaic Solar Energy Conference and Exhibition (EUPVSEC’14), Amsterdam, The Netherlands, 22–26 September 2014; pp. 22–26. [Google Scholar]
- Rigollier, C.; Lefèvre, M.; Wald, L. The method Heliosat-2 for deriving shortwave solar radiation from satellite images. Sol. Energy 2004, 77, 159–169. [Google Scholar] [CrossRef] [Green Version]
- Horn, B.K.; Schunck, B.G. Determining optical flow. Artif. Intell. 1981, 17, 185–203. [Google Scholar] [CrossRef] [Green Version]
- Chow, C.W.; Belongie, S.; Kleissl, J. Cloud motion and stability estimation for intra-hour solar forecasting. Sol. Energy 2015, 115, 645–655. [Google Scholar] [CrossRef]
- Liu, C. Beyond Pixels: Exploring New Representations and Applications for Motion Analysis. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2009. [Google Scholar]
- Kühnert, J.; Lorenz, E.; Heinemann, D. Chapter 11: Satellite-based irradiance and power forecasting for the German energy market. In Solar Energy Forecasting and Resource Assessment; Kleissl, J., Ed.; Academic Press: Cambridge, MA, USA, 2013; pp. 267–297. ISBN 9780123977724. [Google Scholar]
- Verbois, H.; Blanc, P.; Huva, R.; Saint-Drenan, Y.M.; Rusydi, A.; Thiery, A. Beyond quadratic error: Case-study of a multiple criteria approach to the performance assessment of numerical forecasts of solar irradiance in the tropics. Renew. Sustain. Energy Rev. 2020, 117, 109471. [Google Scholar] [CrossRef]
- Lefevre, M.; Oumbe, A.; Blanc, P.; Espinar, B.; Gschwind, B.; Qu, Z.; Wald, L.; Schroedter-Homscheidt, M.; Hoyer-Klick, C.; Arola, A.; et al. McClear: A new model estimating downwelling solar radiation at ground level in clear-sky conditions. Atmos. Meas. Tech. 2013, 6, 2403–2418. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Florita, A.; Hodge, B.M.; Lu, S.; Hamann, H.F.; Banunarayanan, V.; Brockway, A.M. A suite of metrics for assessing the performance of solar power forecasting. Sol. Energy 2015, 111, 157–175. [Google Scholar] [CrossRef] [Green Version]
- Gneiting, T.; Balabdaoui, F.; Raftery, A.E. Probabilistic forecasts, calibration and sharpness. J. R. Stat. Soc. Ser. B (Stat. Methodol.) 2007, 69, 243–268. [Google Scholar] [CrossRef] [Green Version]
- Bröcker, J.; Smith, L.A. Increasing the reliability of reliability diagrams. Weather. Forecast. 2007, 22, 651–661. [Google Scholar] [CrossRef]
- Yang, D. A universal benchmarking method for probabilistic solar irradiance forecasting. Sol. Energy 2019, 184, 410–416. [Google Scholar] [CrossRef]
- Marchand, M.; Saint-Drenan, Y.M.; Saboret, L.; Wey, E.; Wald, L. Performance of CAMS Radiation Service and HelioClim-3 databases of solar radiation at surface: Evaluating the spatial variation in Germany. Adv. Sci. Res. 2020, 17, 143–152. [Google Scholar] [CrossRef]
- Marchand, M.; Ghennioui, A.; Wey, E.; Wald, L. Comparison of several satellite-derived databases of surface solar radiation against ground measurement in Morocco. Adv. Sci. Res. 2018, 15, 21–29. [Google Scholar] [CrossRef]
- Thomas, C.; Saboret, L.; Wey, E.; Blanc, P.; Wald, L. Validation of the new HelioClim-3 version 4 real-time and short-term forecast service using 14 BSRN stations. Adv. Sci. Res. 2016, 13, 129–136. [Google Scholar] [CrossRef] [Green Version]
- Thomas, C.; Wey, E.; Blanc, P.; Wald, L.; Lefèvre, M. Validation of HelioClim-3 version 4, HelioClim-3 version 5 and MACC-RAD using 14 BSRN stations. Energy Procedia 2015, 91, 1059–1069. [Google Scholar] [CrossRef]
- Roesch, A.; Wild, M.; Ohmura, A.; Dutton, E.G.; Long, C.N.; Zhang, T. Assessment of BSRN radiation records for the computation of monthly means. Atmos. Meas. Tech. 2011, 4, 339–354. [Google Scholar] [CrossRef] [Green Version]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Location | Latitude (°) | Longitude (°) | Elevation (m) | Training Period | Evaluation Period |
|---|---|---|---|---|---|
| Carpentras | 44.0830 | 5.0590 | 100 | 2015: 14,573 data | 2016: 13,995 data |
| Signes | 43.25551 | 5.8 | 441 | 2015: 14,686 data | 2016: 13,693 data |
| (km/h) | (radians) | (km) | |
|---|---|---|---|
| 2 | /12 | 1 | 5000 |
| Deterministic Evaluation (Carpentras) | |||||||||||||||
| Category (reference value) | Low variability days 217 days (540.3 W/m) | High variability days 148 days (441.3 W/m) | All days 365 days (500.2 W/m) | ||||||||||||
| Horizon (minutes) | 15 | 30 | 45 | 60 | All | 15 | 30 | 45 | 60 | All | 15 | 30 | 45 | 60 | All |
| nBIAS - Persistence (%) | 0 | −0.1 | −0.2 | −0.4 | −0.2 | 0.1 | 0.1 | −0.1 | −0.3 | 0 | 0 | 0 | −0.2 | −0.4 | −0.1 |
| nBIAS - St-CMV (%) | 0.2 | 0 | −0.3 | −0.8 | −0.2 | 0 | −0.2 | −0.4 | -1 | −0.4 | 0.1 | −0.1 | −0.4 | −0.9 | −0.3 |
| nBIAS - Det-Pr-CMV (%) | 0.3 | 0 | −0.4 | −0.9 | −0.2 | 0.9 | 0.2 | −0.6 | −1.7 | −0.3 | 0.5 | 0.1 | −0.5 | −1.2 | −0.3 |
| nMAE - Persistence (%) | 2.6 | 3.5 | 4.2 | 4.9 | 3.8 | 16.1 | 21.7 | 25 | 27.2 | 22.6 | 7.4 | 10.1 | 11.7 | 12.9 | 10.5 |
| nMAE - St-CMV (%) | 4 | 4.4 | 4.9 | 5.6 | 4.7 | 17.2 | 19.5 | 22.2 | 24.7 | 20.9 | 8.7 | 9.8 | 11.1 | 12.5 | 10.5 |
| nMAE - Det-Pr-CMV (%) | 4 | 4.3 | 4.9 | 5.6 | 4.7 | 17 | 18.3 | 19.9 | 21.9 | 19.3 | 8.6 | 9.3 | 10.3 | 11.4 | 9.9 |
| nRMSE - Persistence (%) | 6.2 | 8 | 9.3 | 10.5 | 8.6 | 24.8 | 32.1 | 36.2 | 38.9 | 33.5 | 14.9 | 19.2 | 21.8 | 23.6 | 20.1 |
| nRMSE - St-CMV (%) | 7.2 | 8.2 | 9.2 | 10.4 | 8.8 | 24.5 | 27.6 | 31.2 | 34.3 | 29.7 | 15 | 16.9 | 19.1 | 21.2 | 18.2 |
| nRMSE - Det-Pr-CMV (%) | 7.1 | 7.7 | 8.8 | 9.9 | 8.4 | 24.3 | 25.7 | 27.7 | 30.2 | 27.1 | 14.9 | 15.8 | 17.2 | 18.8 | 16.7 |
| Probabilistic Evaluation (Carpentras) | |||||||||||||||
| Category (reference value) | Low variability days 217 days (540.3 W/m) | High variability days 148 days (441.3 W/m) | All days 365 days (500.2 W/m) | ||||||||||||
| Horizon (minutes) | 15 | 30 | 45 | 60 | All | 15 | 30 | 45 | 60 | All | 15 | 30 | 45 | 60 | All |
| MRD - CH-PeEn (%) | 8.4 | 8.4 | 8.4 | 8.4 | 8.4 | 12.2 | 12.2 | 12.2 | 12.2 | 12.2 | 0.1 | 0.1 | 0.1 | 0.1 | 0.1 |
| MRD - Pr-CMV (%) | 5.2 | 4.8 | 5.2 | 6.5 | 4.7 | 5.3 | 5.9 | 6.5 | 7.3 | 6.3 | 2.2 | 3.5 | 4.8 | 6 | 4.1 |
| MPINAW - CH-PeEn (%) | 46.1 | 46.1 | 46.1 | 46.1 | 46.1 | 57.1 | 57.1 | 57.1 | 57.1 | 57.1 | 50.2 | 50.2 | 50.2 | 50.2 | 50.2 |
| MPINAW - Pr-CMV (%) | 11.3 | 11.7 | 12.0 | 12.6 | 11.8 | 22.9 | 25.0 | 27.4 | 29.1 | 26.1 | 15.4 | 16.4 | 17.6 | 18.6 | 17.0 |
| CRPS - CH-PeEn (%) | 13.8 | 13.8 | 13.8 | 13.8 | 13.8 | 25.2 | 25.2 | 25.2 | 25.2 | 25.2 | 17.8 | 17.8 | 17.8 | 17.8 | 17.8 |
| CRPS - Pr-CMV (%) | 3.2 | 3.5 | 3.9 | 4.4 | 3.7 | 12.8 | 13.6 | 14.8 | 16.2 | 14.3 | 6.6 | 7.1 | 7.8 | 8.6 | 7.5 |
| Deterministic Evaluation (Signes) | |||||||||||||||
| Category (reference value) | Low variability days 178 days (599.2 W/m) | High variability days 187 days (452.1 W/m) | All days (530.7 W/m) | ||||||||||||
| Horizon (minutes) | 15 | 30 | 45 | 60 | All | 15 | 30 | 45 | 60 | All | 15 | 30 | 45 | 60 | All |
| nBIAS - Persistence (%) | 0.5 | 0.8 | 1 | 0.9 | 0.8 | 0.4 | 0.7 | 0.9 | 0.8 | 0.7 | 0.5 | 0.8 | 0.9 | 0.8 | 0.7 |
| nBIAS - St-CMV (%) | 0.7 | 0.5 | 0.2 | −0.4 | 0.3 | 1.7 | 1.6 | 1.3 | 0.6 | 1.3 | 1.1 | 0.9 | 0.6 | 0 | 0.7 |
| nBIAS - Det-Pr-CMV (%) | 0.7 | 0.5 | 0 | −0.8 | 0.1 | 1.4 | 1.4 | 0.7 | −0.1 | 0.8 | 0.9 | 0.9 | 0.3 | −0.5 | 0.4 |
| nMAE - Persistence (%) | 2.6 | 3.8 | 4.8 | 5.8 | 4.2 | 17.8 | 23.5 | 26.3 | 28.6 | 24.1 | 8.6 | 11.6 | 13.3 | 14.8 | 12.1 |
| nMAE - St-CMV (%) | 6.5 | 6.8 | 7.3 | 8.3 | 7.2 | 19.9 | 22.6 | 24.9 | 27 | 23.6 | 11.8 | 13.1 | 14.3 | 15.5 | 13.7 |
| nMAE - Det-Pr-CMV (%) | 6.5 | 6.9 | 7.5 | 8.2 | 7.3 | 19.6 | 21.7 | 23.2 | 25.1 | 22.4 | 11.7 | 12.8 | 13.7 | 14.9 | 13.3 |
| nRMSE - Persistence (%) | 5.7 | 7.6 | 8.9 | 10 | 8.2 | 27.2 | 34.7 | 38 | 40.5 | 35.4 | 16.5 | 21.1 | 23.2 | 24.9 | 21.7 |
| nRMSE - St-CMV (%) | 8.9 | 9.5 | 10.2 | 11.3 | 10 | 28 | 31.6 | 34.8 | 37.4 | 33.1 | 17.8 | 20 | 21.9 | 23.6 | 21 |
| nRMSE - Det-Pr-CMV (%) | 8.8 | 9.5 | 10.3 | 11.6 | 10.1 | 27.4 | 30.2 | 32.4 | 34.7 | 31.3 | 17.5 | 19.2 | 20.6 | 22.3 | 20 |
| Probabilistic Evaluation (Signes) | |||||||||||||||
| Category (reference value) | Low variability days 178 days (599.2 W/m) | High variability days 187 days (452.1 W/m) | All days (530.7 W/m) | ||||||||||||
| Horizon (minutes) | 15 | 30 | 45 | 60 | All | 15 | 30 | 45 | 60 | All | 15 | 30 | 45 | 60 | All |
| MRD - CH-PeEn (%) | 10 | 10 | 10 | 10 | 10 | 11 | 11 | 11 | 11 | 11 | 0.2 | 0.2 | 0.2 | 0.2 | 0.2 |
| MRD - Pr-CMV (%) | 2 | 1.5 | 2.1 | 3 | 2.1 | 432 | 4.7 | 4.7 | 5.1 | 4.6 | 1.3 | 1.7 | 2 | 2.8 | 1.8 |
| MPINAW - CH-PeEn (%) | 45.6 | 45.6 | 45.6 | 45.6 | 45.6 | 58.0 | 58.0 | 58.0 | 58.0 | 58.0 | 50.5 | 50.5 | 50.5 | 50.5 | 50.5 |
| MPINAW - Pr-CMV (%) | 16.3 | 16.7 | 17.0 | 17.5 | 16.9 | 28.0 | 29.9 | 32.2 | 33.9 | 31.0 | 20.9 | 21.9 | 23.1 | 24.0 | 22.5 |
| CRPS - CH-PeEn (%) | 12.8 | 12.8 | 12.8 | 12.8 | 12.8 | 25.0 | 25.0 | 25.0 | 25.0 | 25.0 | 17.6 | 17.6 | 17.6 | 17.6 | 17.6 |
| CRPS - Pr-CMV (%) | 4.9 | 5.2 | 5.6 | 6.2 | 5.5 | 14.4 | 15.7 | 17.0 | 18.4 | 16.4 | 8.6 | 9.4 | 10.1 | 11.0 | 9.8 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Carrière, T.; Amaro e Silva, R.; Zhuang, F.; Saint-Drenan, Y.-M.; Blanc, P. A New Approach for Satellite-Based Probabilistic Solar Forecasting with Cloud Motion Vectors. Energies 2021, 14, 4951. https://doi.org/10.3390/en14164951
Carrière T, Amaro e Silva R, Zhuang F, Saint-Drenan Y-M, Blanc P. A New Approach for Satellite-Based Probabilistic Solar Forecasting with Cloud Motion Vectors. Energies. 2021; 14(16):4951. https://doi.org/10.3390/en14164951
Chicago/Turabian StyleCarrière, Thomas, Rodrigo Amaro e Silva, Fuqiang Zhuang, Yves-Marie Saint-Drenan, and Philippe Blanc. 2021. "A New Approach for Satellite-Based Probabilistic Solar Forecasting with Cloud Motion Vectors" Energies 14, no. 16: 4951. https://doi.org/10.3390/en14164951
APA StyleCarrière, T., Amaro e Silva, R., Zhuang, F., Saint-Drenan, Y.-M., & Blanc, P. (2021). A New Approach for Satellite-Based Probabilistic Solar Forecasting with Cloud Motion Vectors. Energies, 14(16), 4951. https://doi.org/10.3390/en14164951