
Generalized Normal Distribution Algorithm-Based Control of 3-Phase 4-Wire Grid-Tied PV-Hybrid Energy Storage System

 ,
,  and
and 
Abstract
:1. Introduction
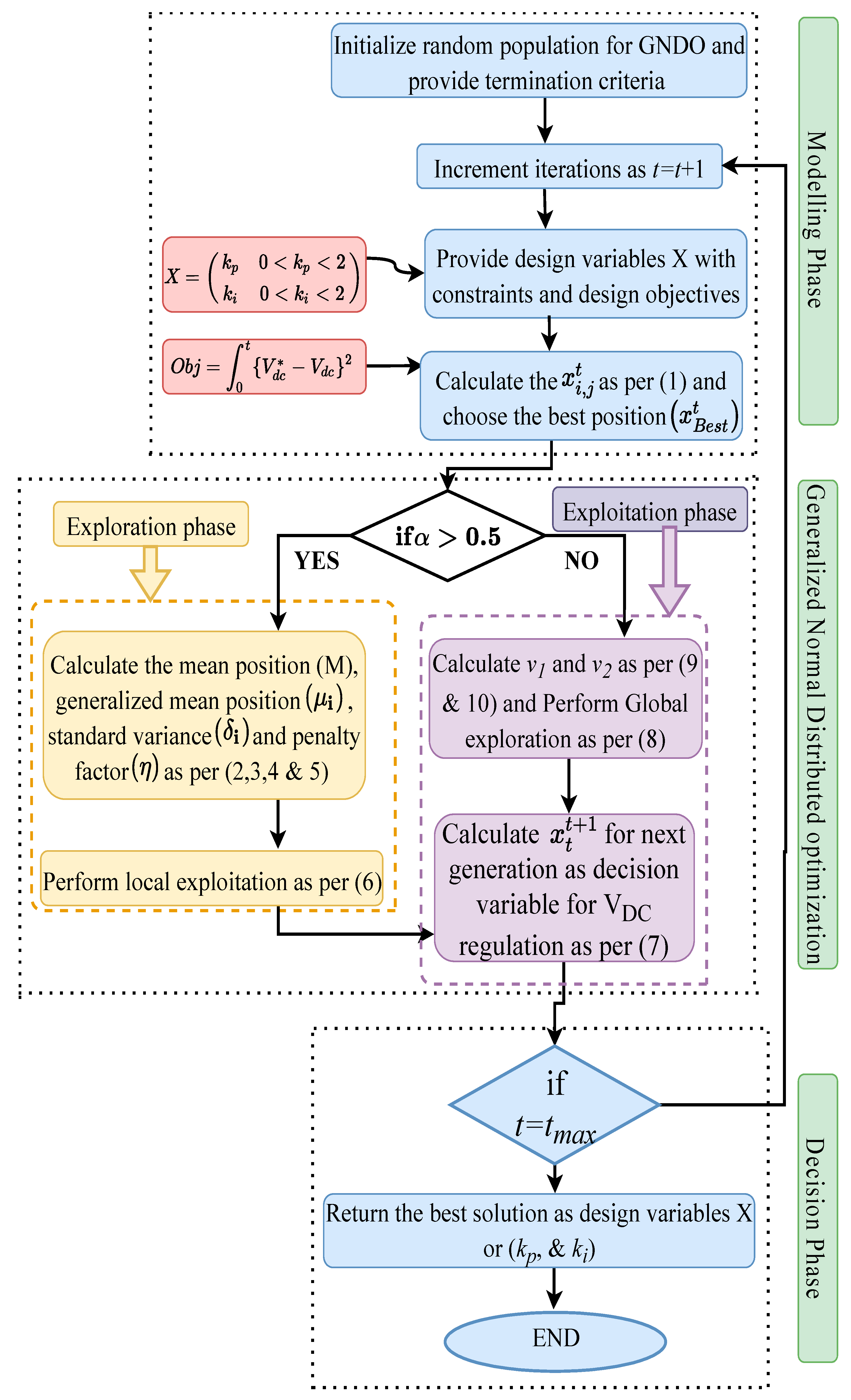
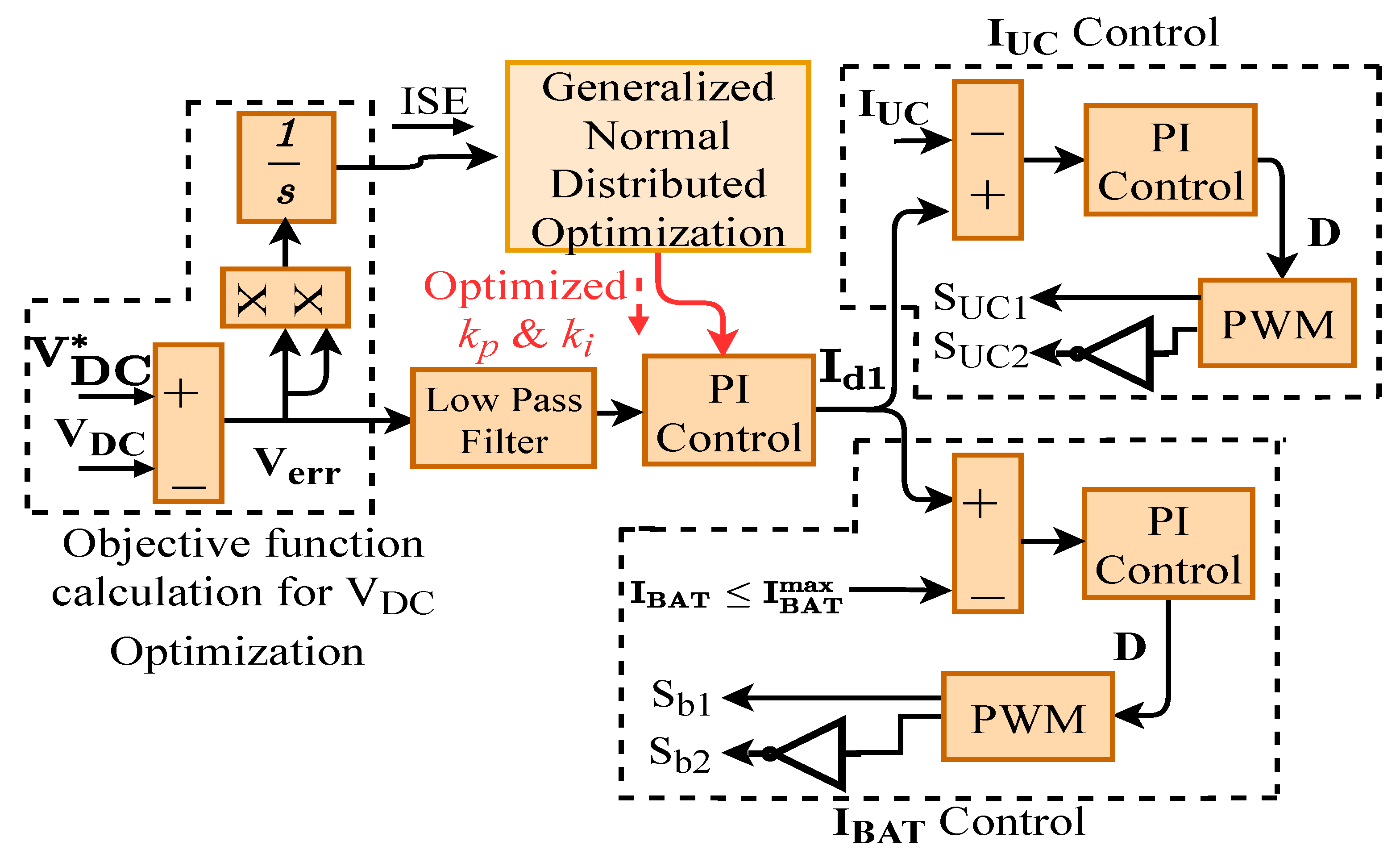
- The GNDO algorithm is utilized for the optimal gain tuning of the PI controller to secure the during various induced dynamic conditions in the system and generate the accurate loss component of current for enhanced VSC performance.
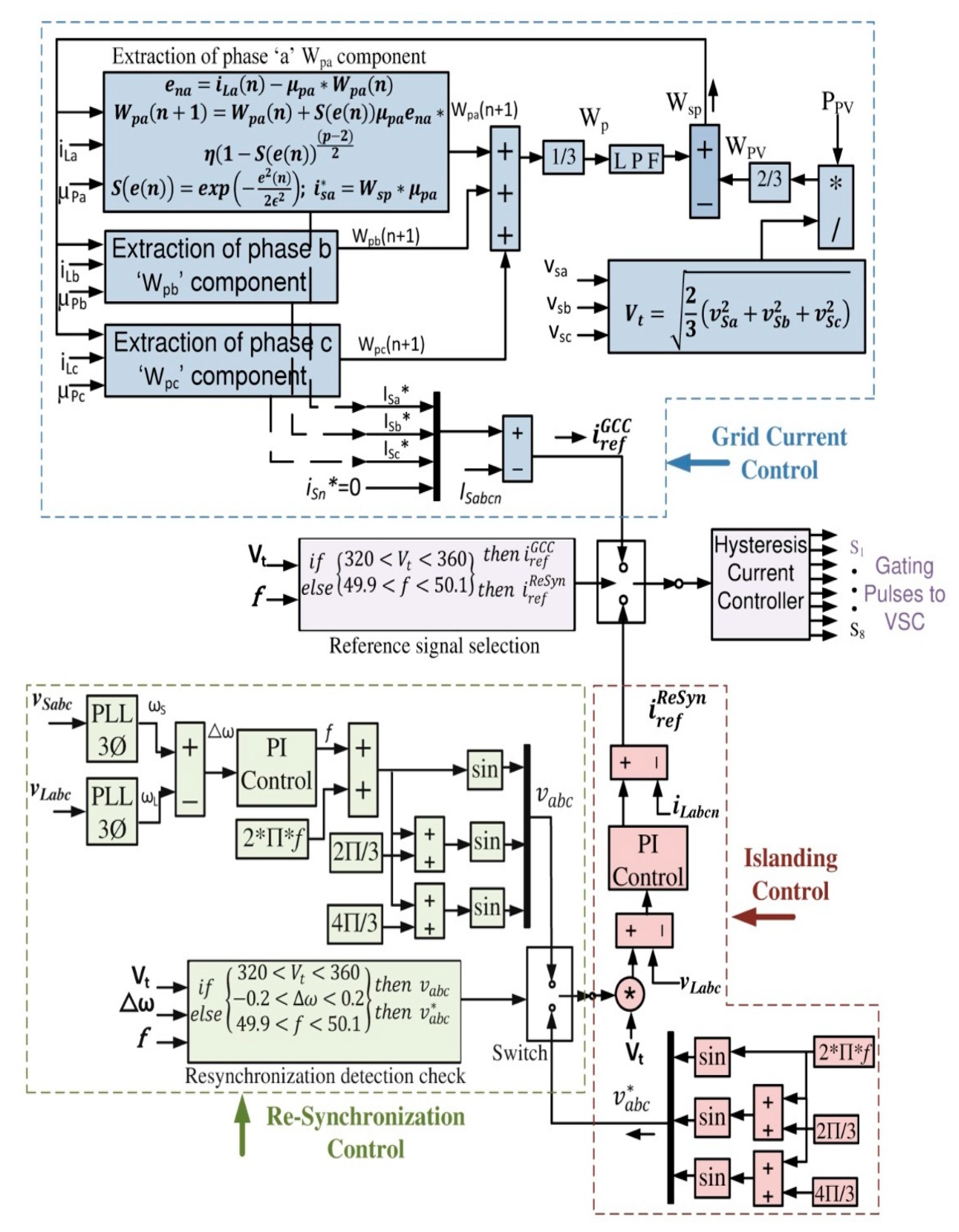
- MRFKMP-based adaptive control of VSC is employed, that accurately extracts the fundamental load current component, delivers a better convergence rate with less computational complexity and performs better than other adaptive controls during both steady-state and dynamic state operations.
2. System Description
3. System Controlling Strategies
3.1. Optimization-Based Control
3.2. VSC Control
3.3. Seamless Control
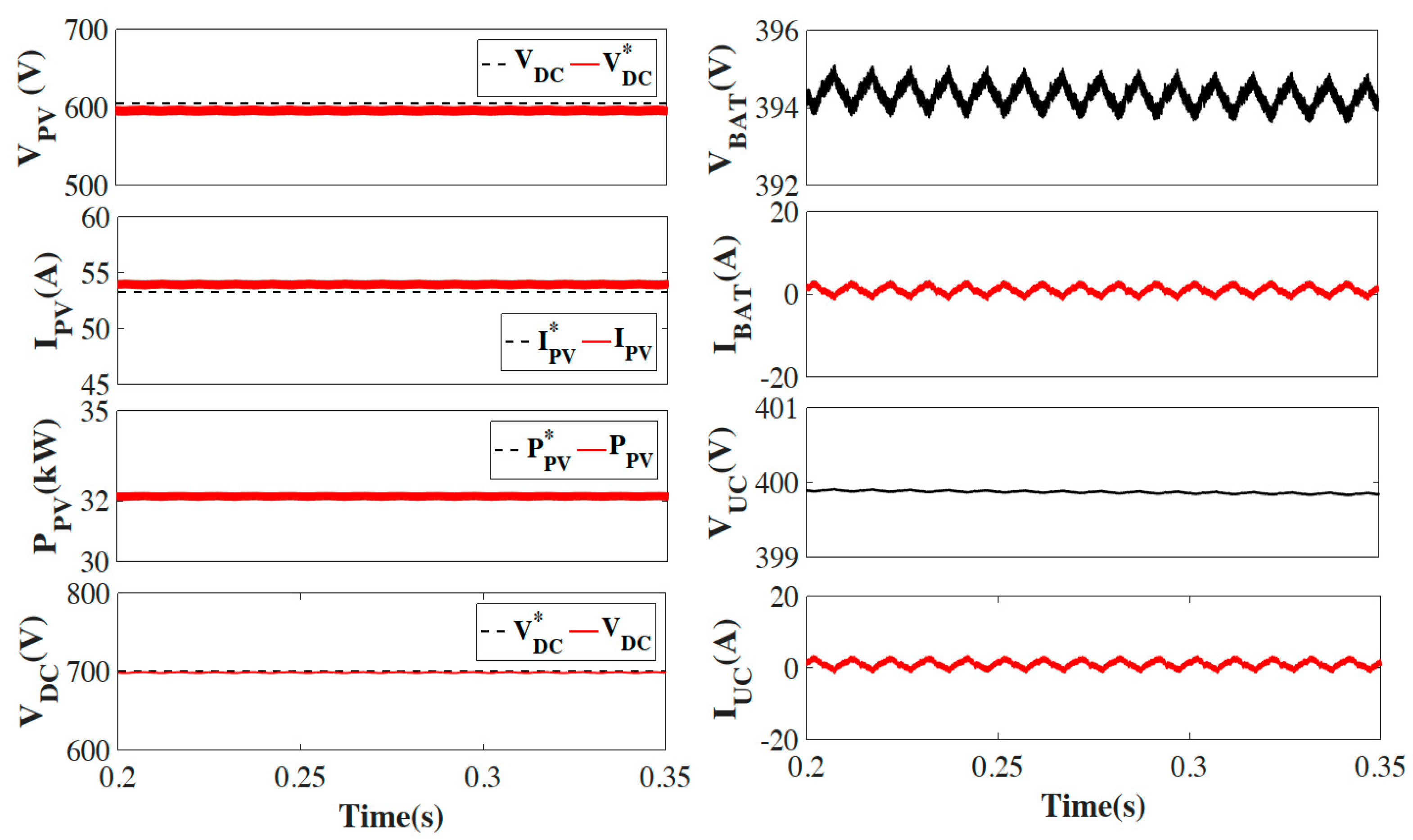
3.4. HESS Control
4. Results and Discussions
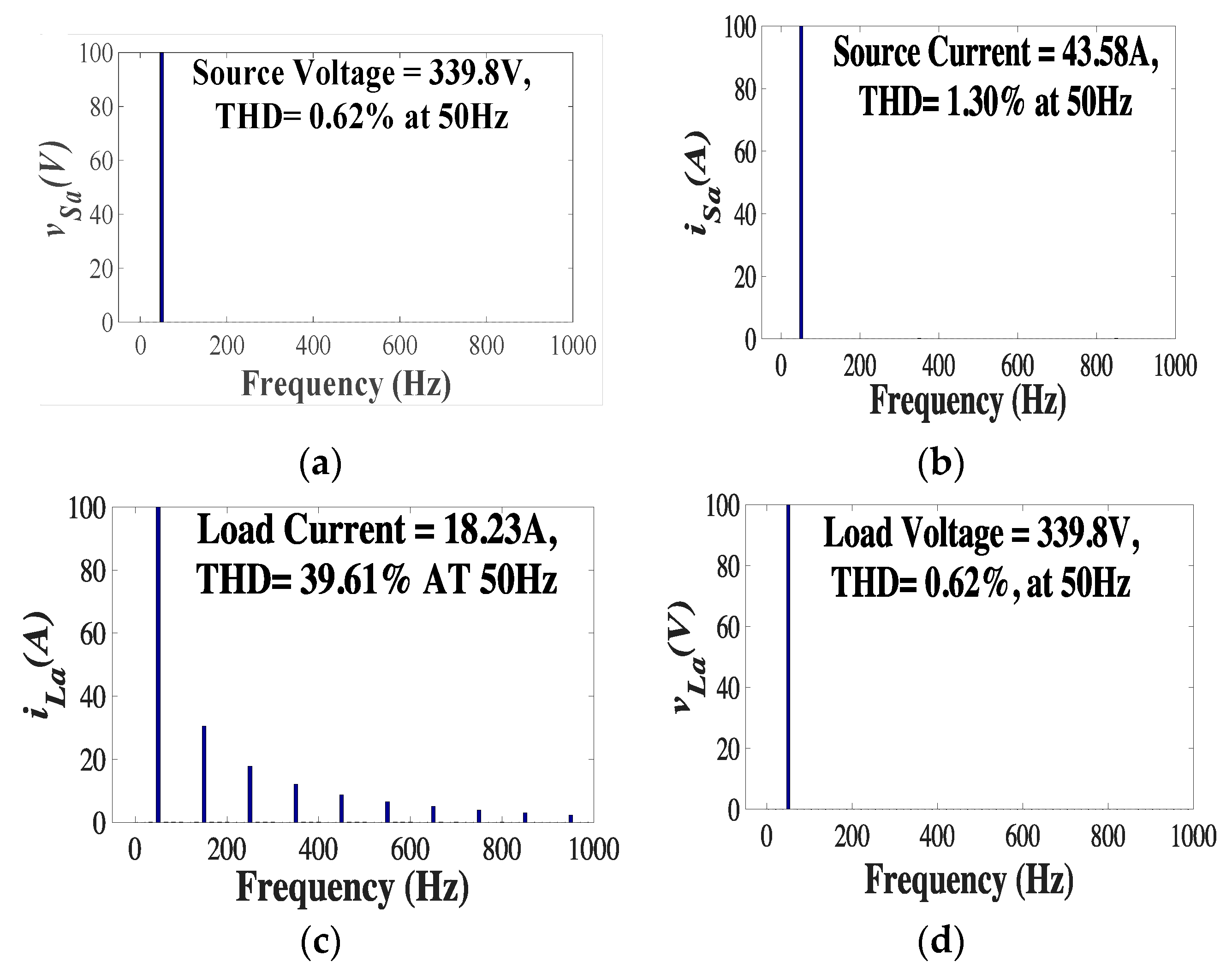
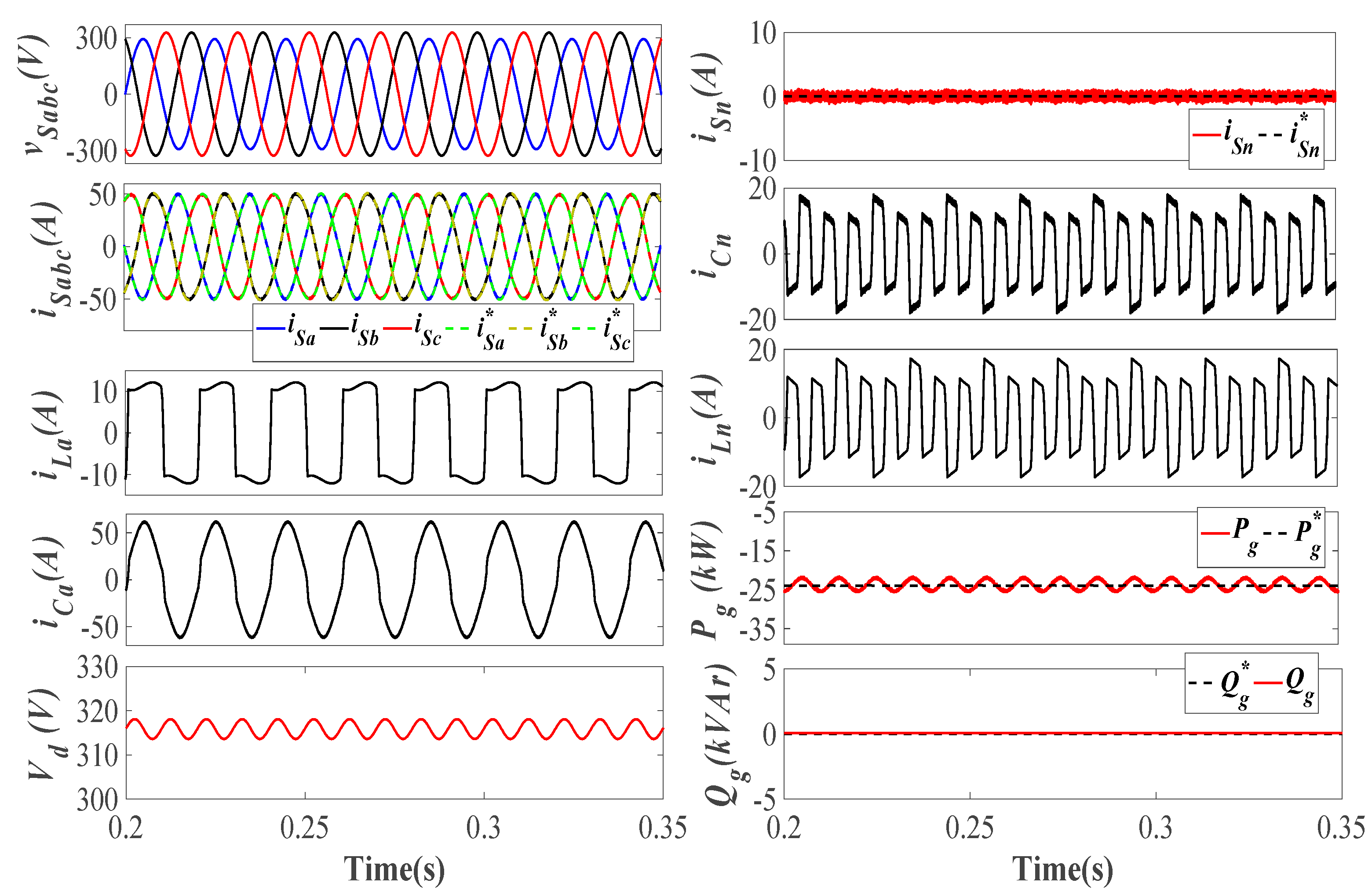
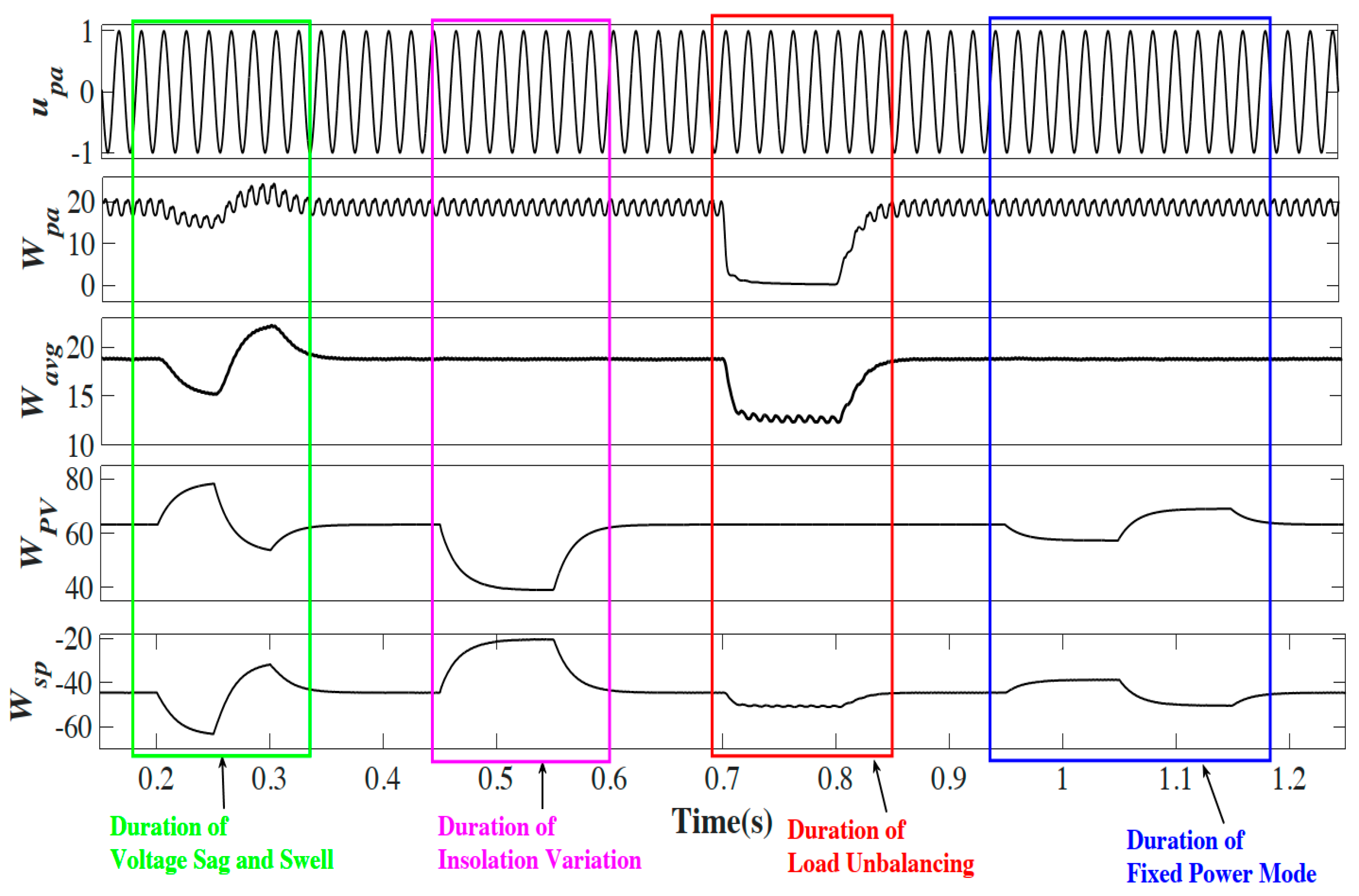
4.1. Steady-State Analysis
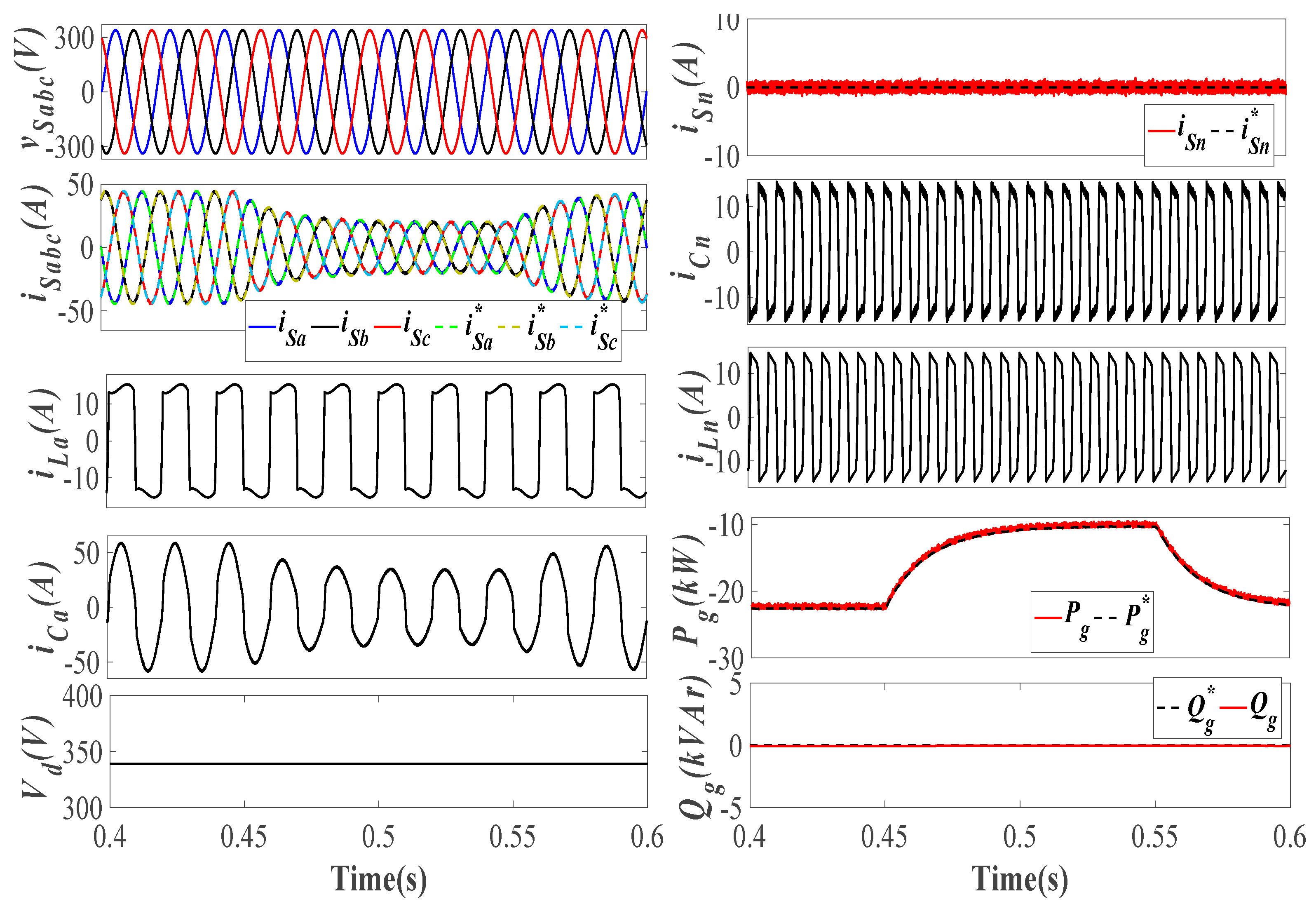
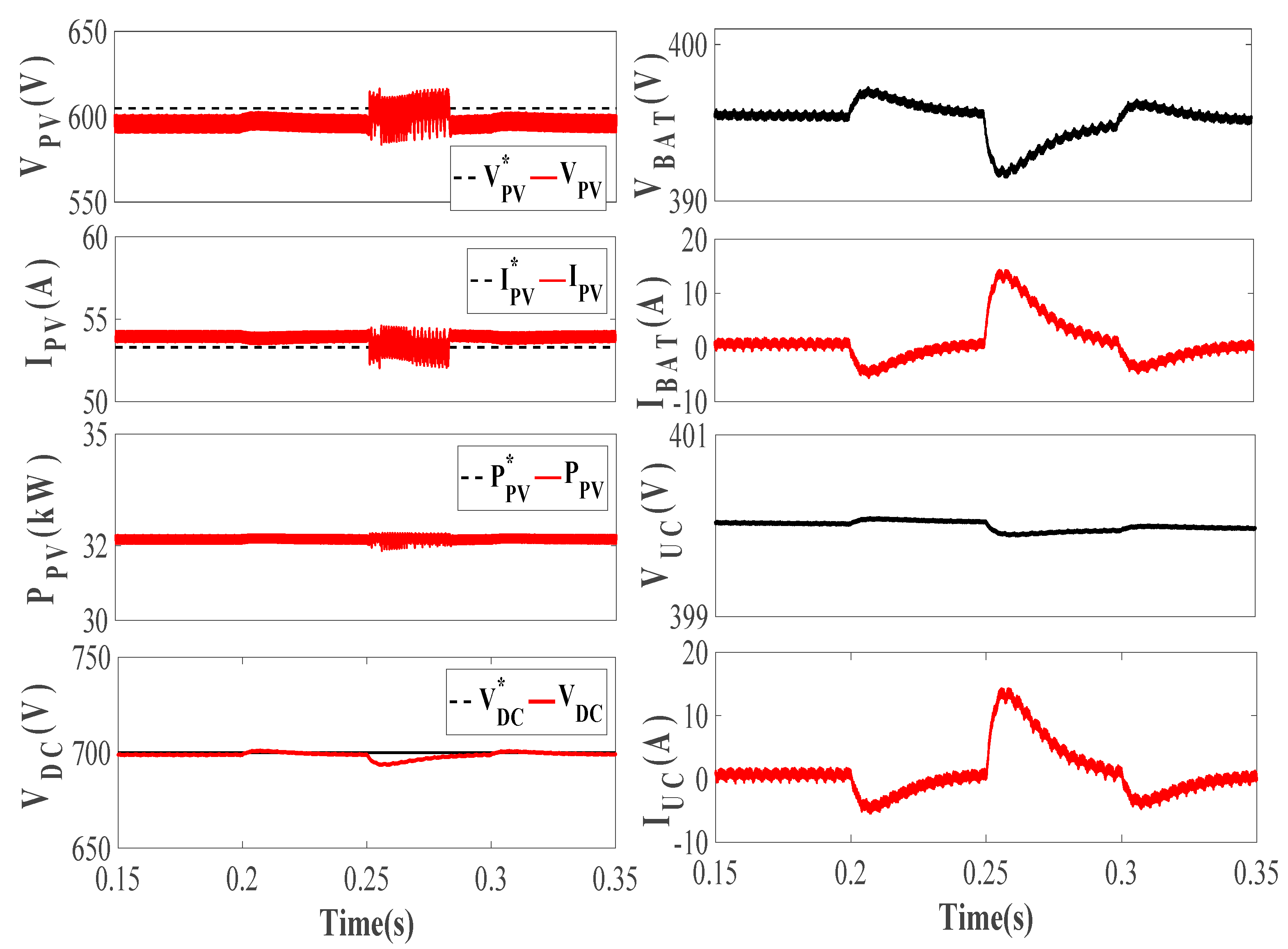
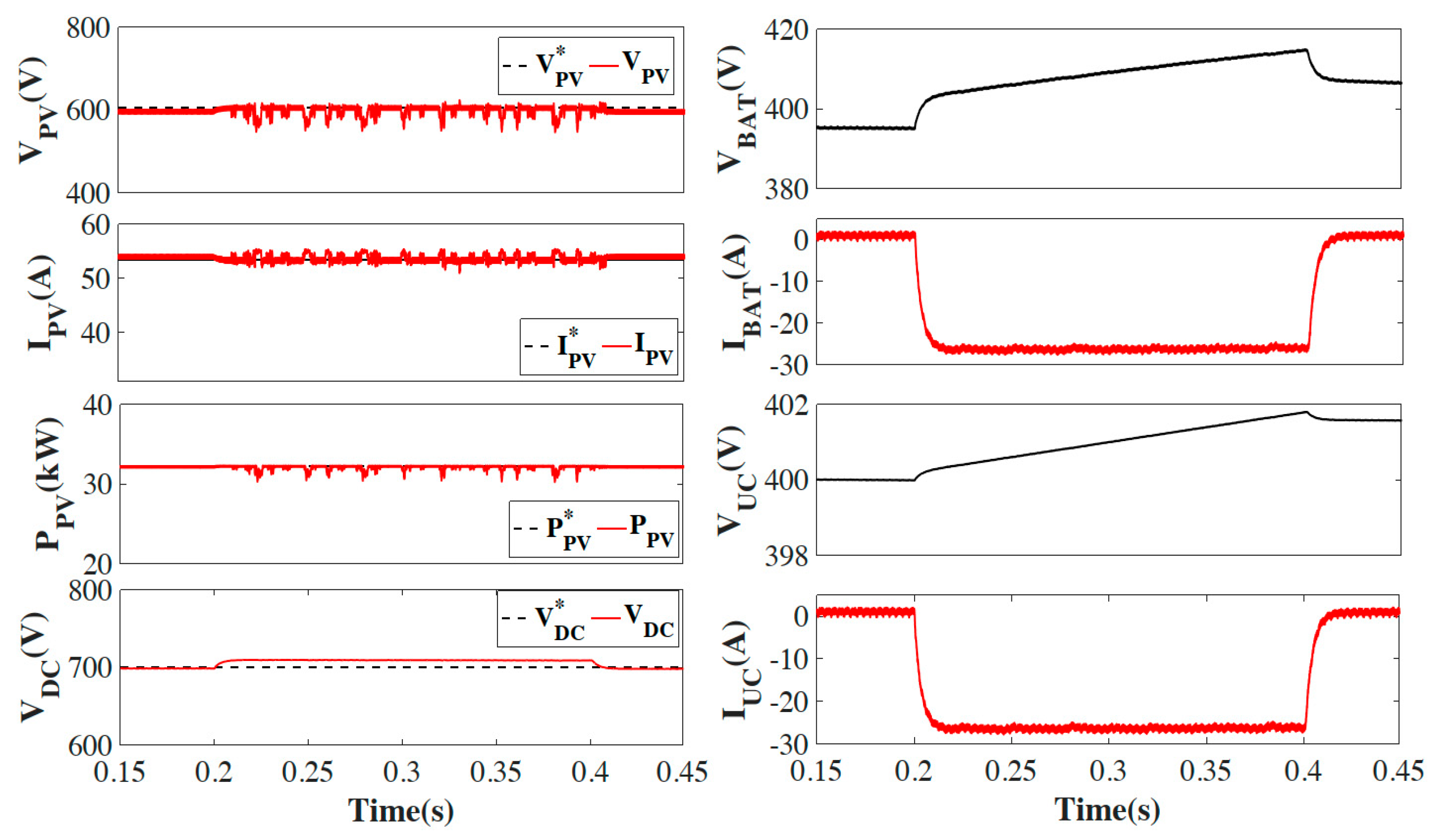
4.2. Irradiation Variation Analysis
4.3. Unbalanced Grid Voltage Analysis
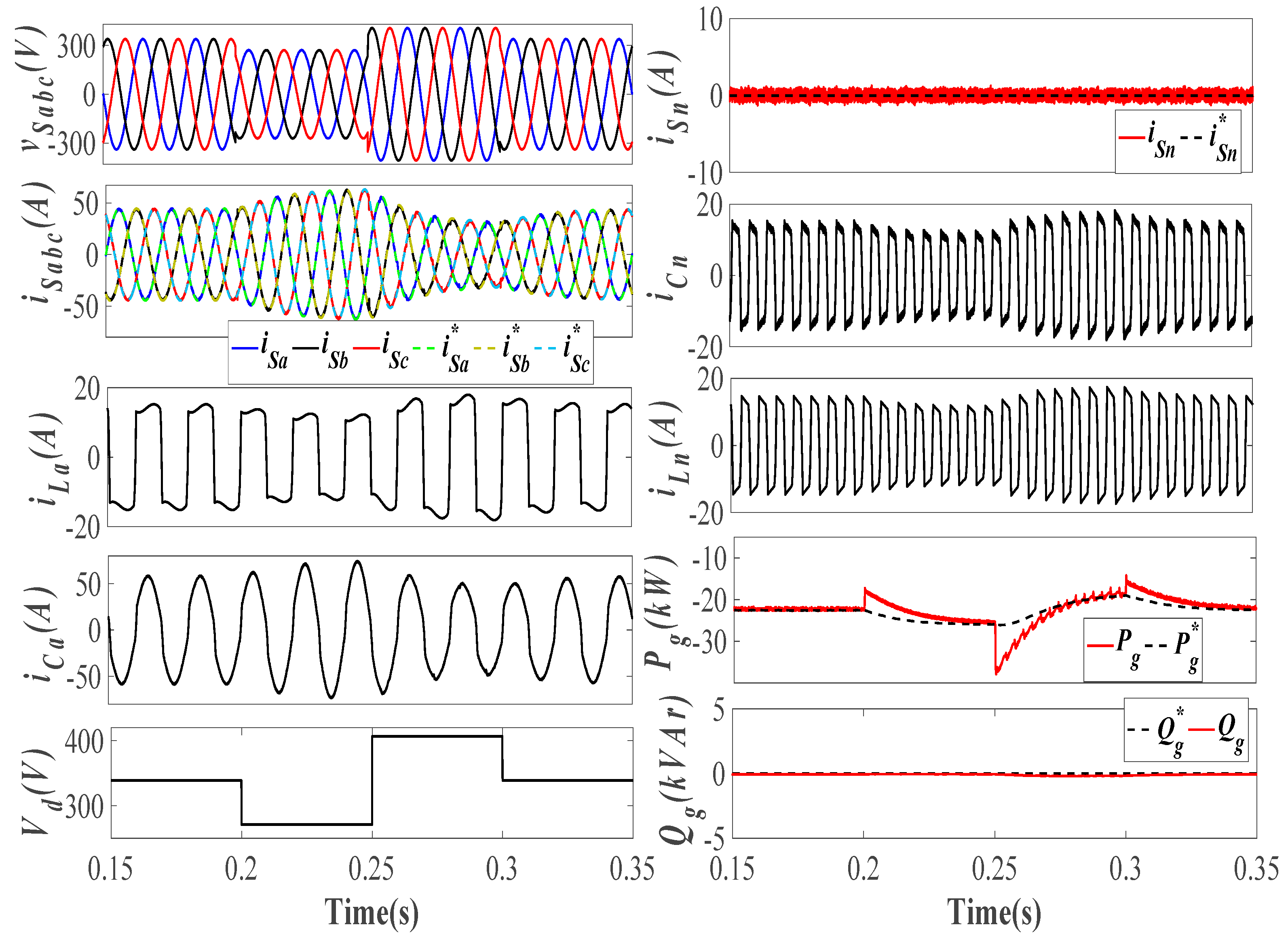
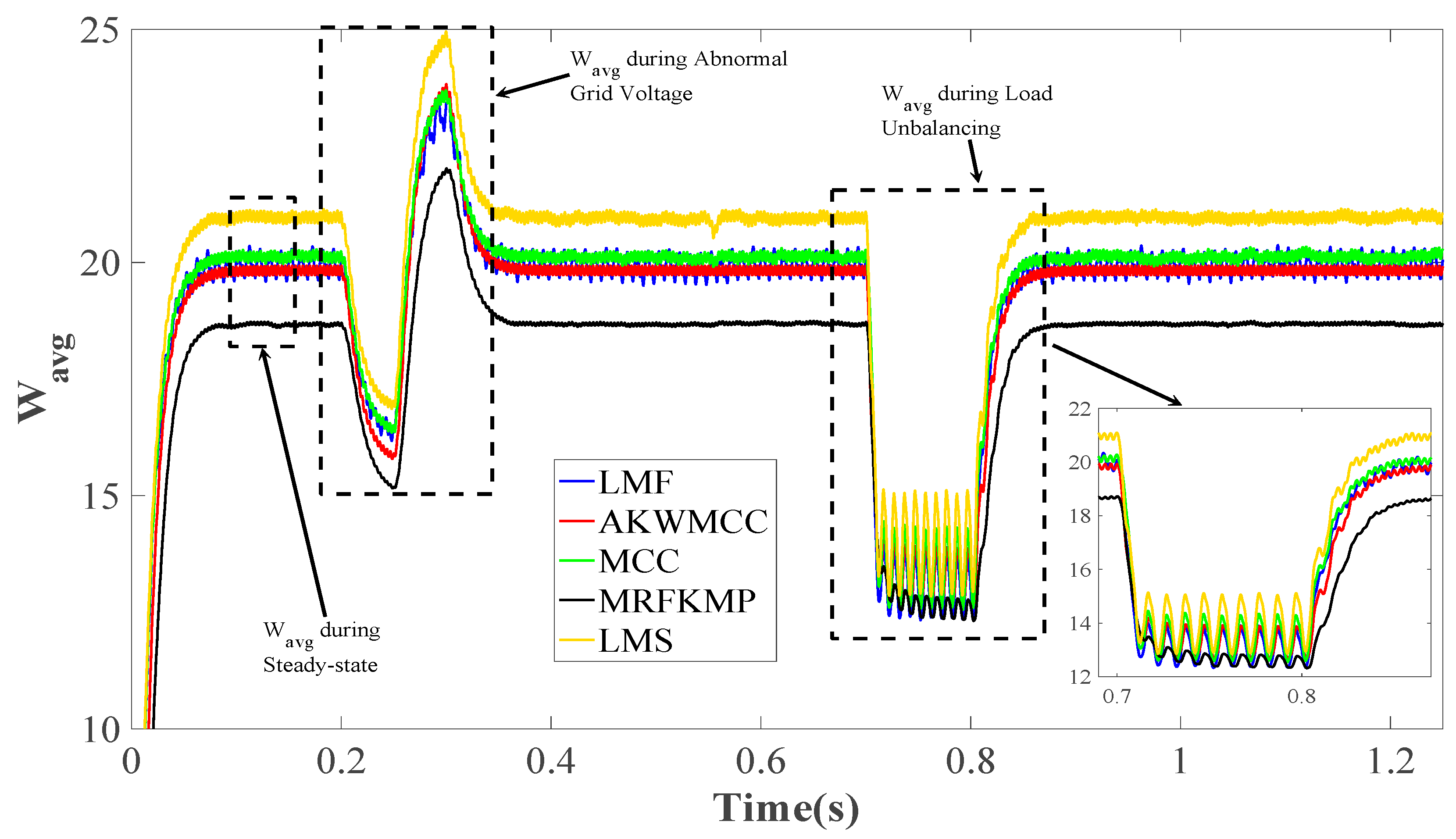
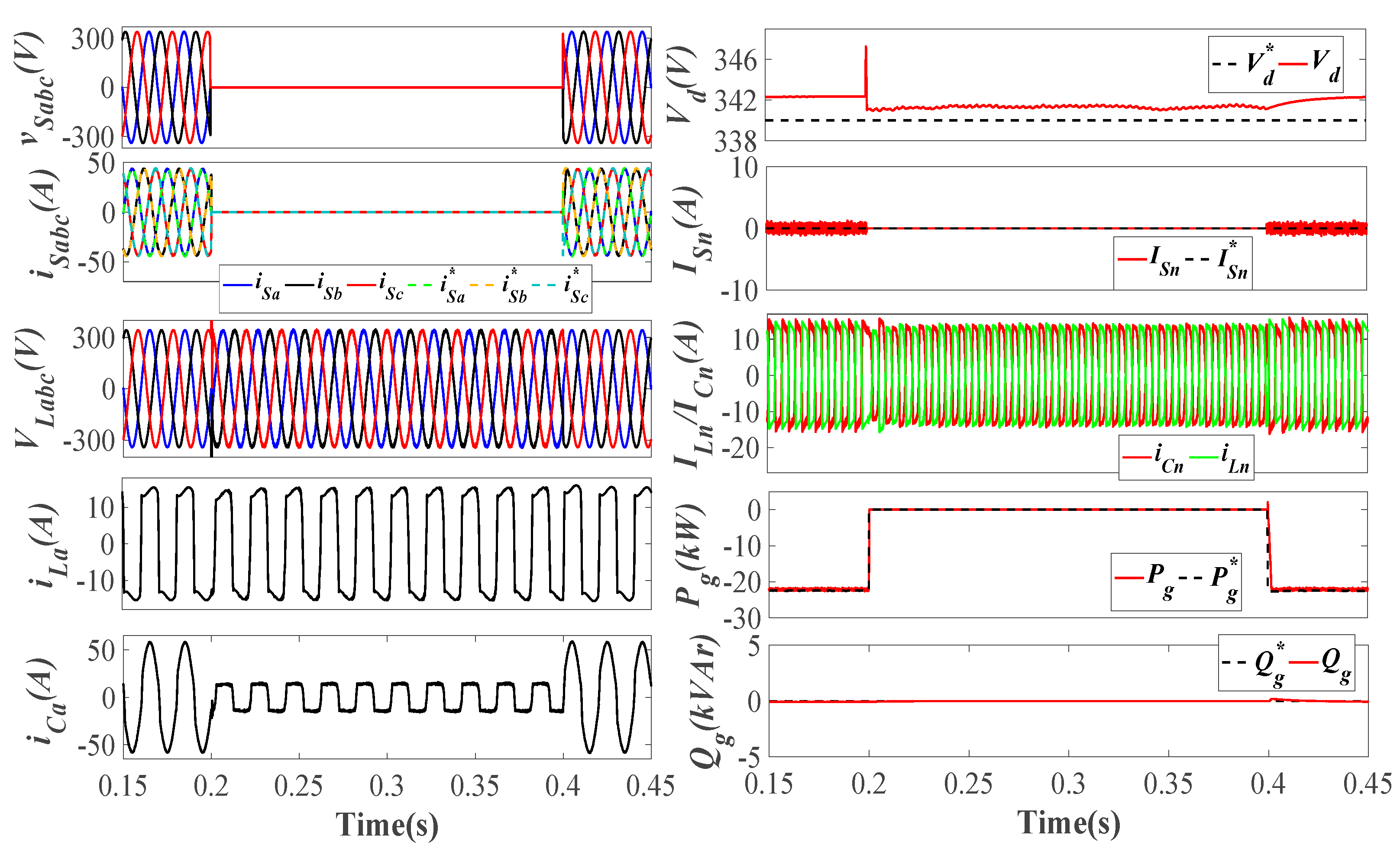
4.4. Abnormal Grid Voltage Analysis
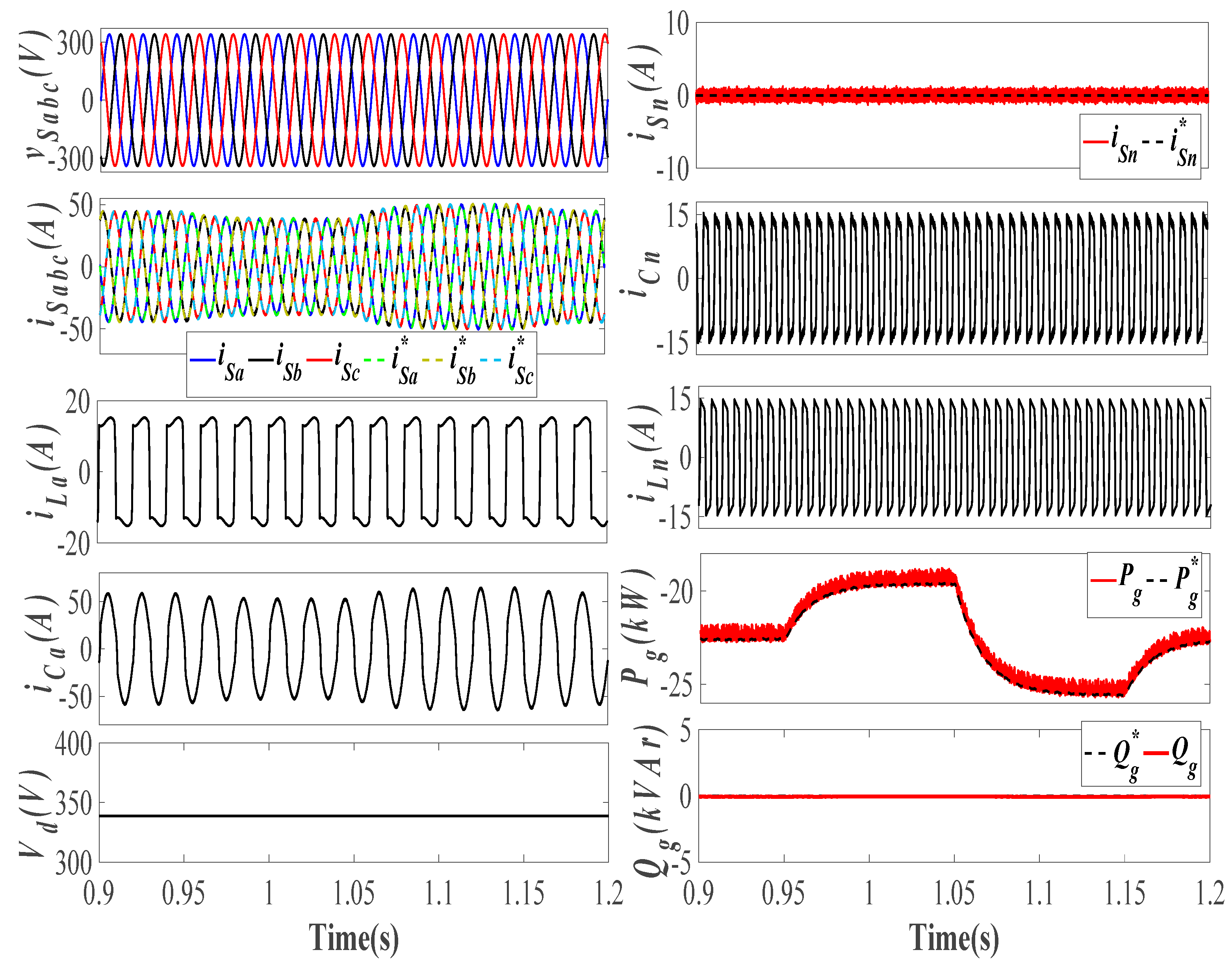
4.5. Specified Power Mode Analysis
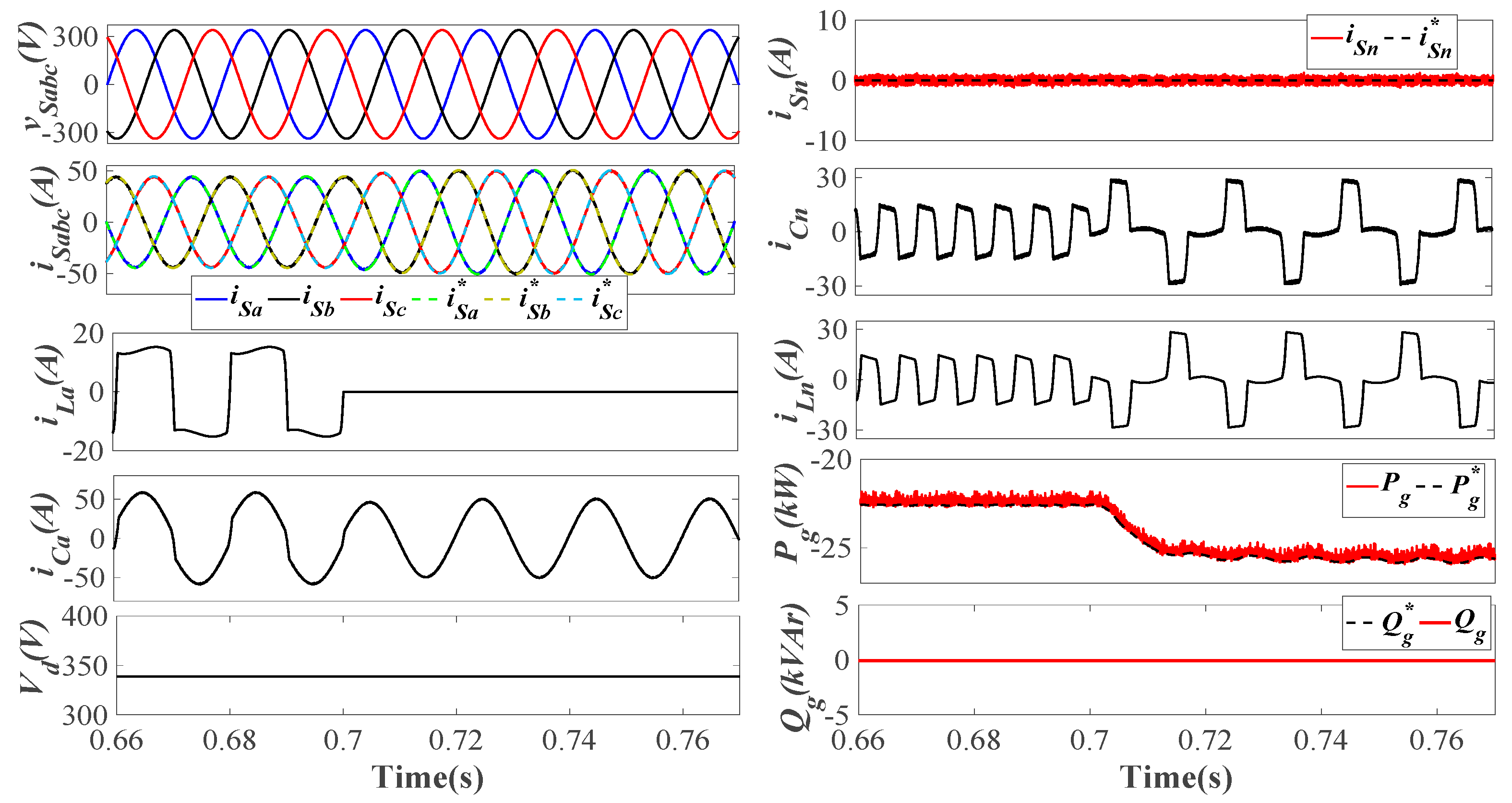
4.6. Unbalanced Load Analysis
4.7. Internal Signal Analysis
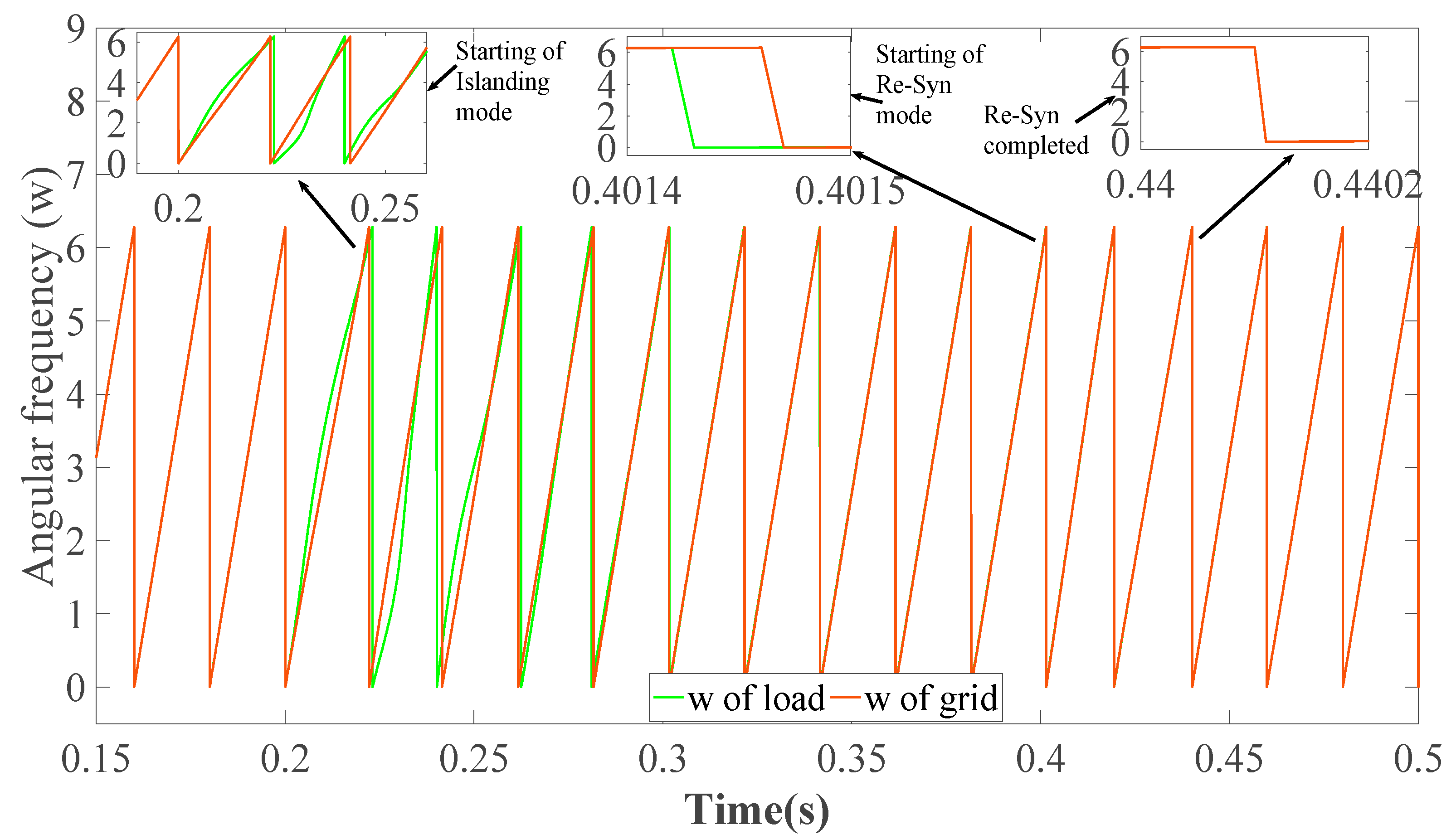
4.8. Islanding and Re-Synchronization Analysis
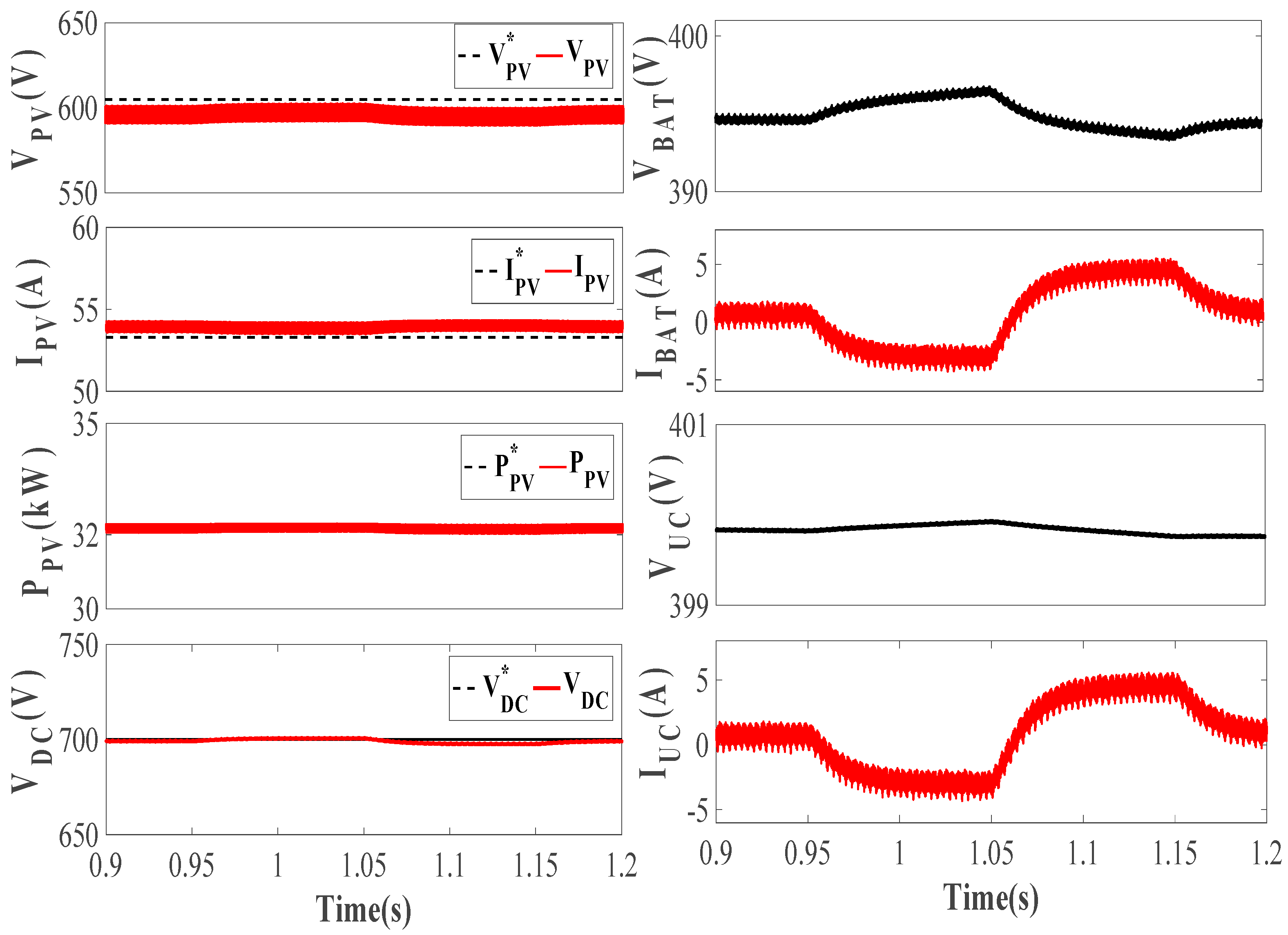
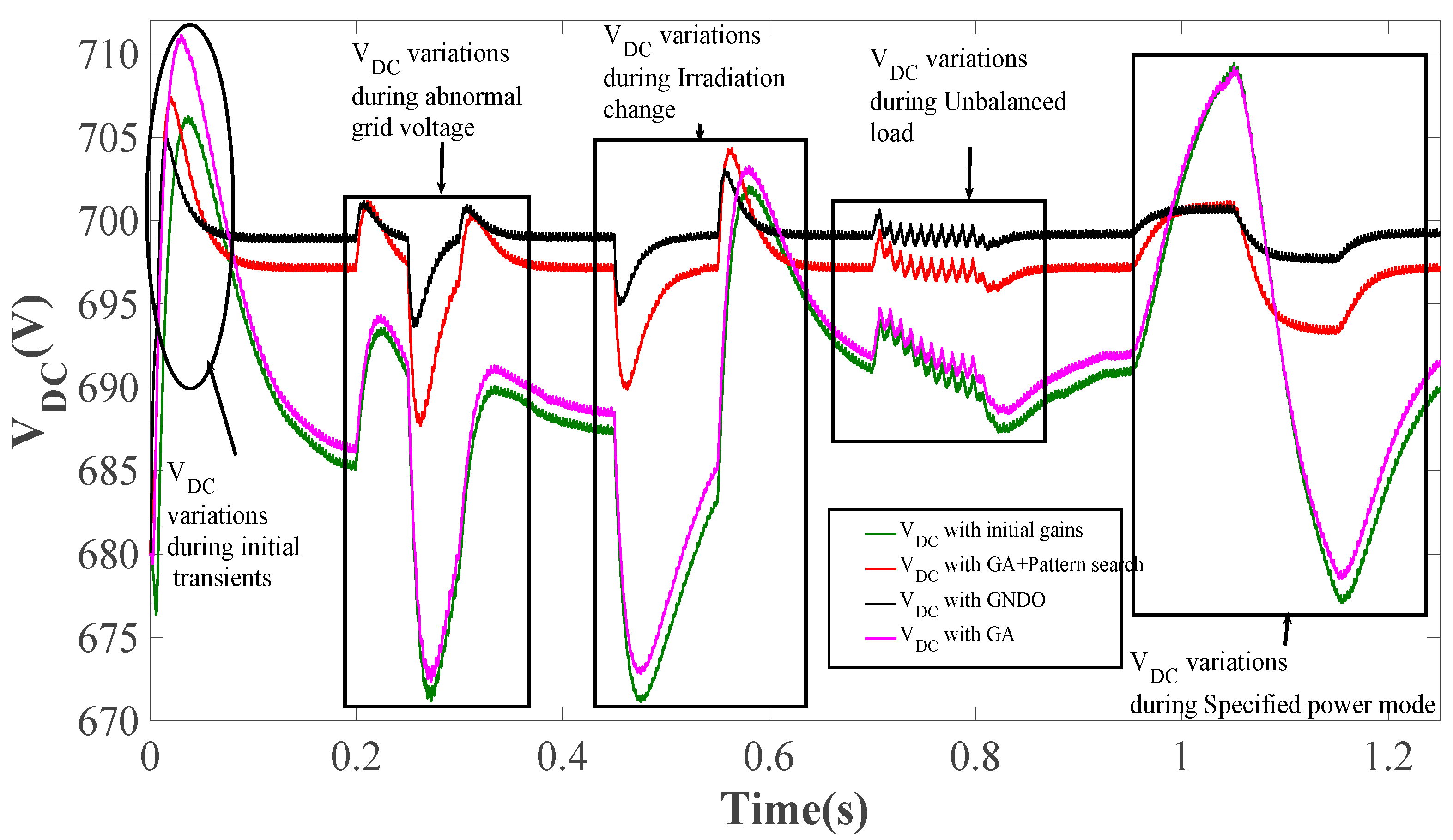
4.9. Optimized DC Bus Analysis
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- IEA, Solar PV, IEA, Paris. 2020. Available online: https://www.iea.org/reports/solar-pv (accessed on 13 October 2020).
- Thotakura, S.; Chandan, S.; Xavier, J.F.; Quanjin, M.; Ramakrishna, G.; Gangwar, P.; Lakshmi, S. Operational performance of megawatt-scale grid integrated rooftop solar PV system in tropical wet and dry climates of India. Case Stud. Therm. Eng. 2020, 18, 100602. [Google Scholar] [CrossRef]
- IEA. World Energy Outlook 2020, IEA, Paris. 2020. Available online: https://www.iea.org/reports/world-energy-outlook-2020 (accessed on 13 October 2020).
- Rohankar, N.; Jain, A.K.; Nangia, O.P.; Dwivedi, P. A study of existing solar power policy framework in India for viability of the solar projects perspective. Renew. Sustain. Energy Rev. 2016, 56, 510–518. [Google Scholar] [CrossRef]
- National Power Portal India. Total installed power capicity. 2021. Available online: https://npp.gov.in/dashBoard/cp-map-dashboard (accessed on 1 June 2021).
- Arcos-Vargas, A.; Nuñez, F.; Román-Collado, R. Short-term effects of PV integration on global welfare and CO2 emissions. An application to the Iberian electricity market. Energy 2020, 200. [Google Scholar] [CrossRef]
- Singh, B.; Chandra, A.; Al-haddad, K. Power Quality Problems and Mitigation Techniques; John Wiley and Sons: Hoboken, NJ, USA, 2014. [Google Scholar]
- Krithiga, S.; Gounden, N.A. Investigations of an improved PV system topology using multilevel boost converter and line commutated inverter with solutions to grid issues. Simul. Model. Pract. Theory 2014, 42, 147–159. [Google Scholar] [CrossRef]
- Davila-Gomez, L.; Colmenar-Santos, A.; Tawfik, M.; Castro-Gil, M. An accurate model for simulating energetic behavior of PV grid connected inverters. Simul. Model. Pract. Theory 2014, 49, 57–72. [Google Scholar] [CrossRef] [Green Version]
- Chawda, G.S.; Shaik, A.G.; Mahela, O.P.; Padmanaban, S.; Holm-Nielsen, J.B. Comprehensive review of distributed FACTS control algorithms for power quality enhancement in utility grid with renewable energy penetration. IEEE Access 2020, 8, 107614–107634. [Google Scholar] [CrossRef]
- Shah, P.; Singh, B. Kalman filtering technique for rooftop-PV system. IEEE Trans. Sustain. Energy 2020, 11, 282–293. [Google Scholar] [CrossRef]
- Sharma, V.; Gidwani, L. Recognition of disturbances in hybrid power system interfaced with battery energy storage system using combined features of Stockwell transform and Hilbert transform. Energy 2019, 7, 671–687. [Google Scholar] [CrossRef]
- Agarwal, R.K.; Hussain, I.; Singh, B. Application of LMS-based NN structure for power quality enhancement in a distribution network under abnormal conditions. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 1598–1607. [Google Scholar] [CrossRef]
- Agarwal, R.K.; Hussain, I.; Singh, B. LMF-based control algorithm for single stage three-phase grid integrated solar PV system. IEEE Trans. Sustain. Energy 2016, 7, 1379–1387. [Google Scholar] [CrossRef]
- Xiong, K.; Shi, W.; Wang, S. Robust multikernel maximum correntropy filters. IEEE Trans. Circuits Syst. II Express Briefs 2020, 67, 1159–1163. [Google Scholar] [CrossRef]
- Agarwal, R.K.; Hussain, I.; Singh, B. Integration of single-stage SPV generation to grid using admittance based LMS technique. In Proceedings of the 2016 International Conference on Emerging Trends in Electrical Electronics and Sustainable Energy Systems (ICETEESES), Sultanpur, India, 11–12 March 2016; pp. 308–313. [Google Scholar] [CrossRef]
- Kumar, A.; Singh, B.; Jain, R. Double stage grid-tied solar PV system using HC-LMS control. In Proceedings of the IEEE 9th Power India International Conference (PIICON 2020), Sonepat, India, 28 February–1 March 2020; pp. 3–8. [Google Scholar] [CrossRef]
- Pradhan, S.; Hussain, I.; Singh, B.; Panigrahi, B.K. Modified VSS-LMS-based adaptive control for improving the performance of a single-stage PV-integrated grid system. IET Sci. Meas. Technol. 2017, 11, 388–399. [Google Scholar] [CrossRef]
- Srinivas, M.; Hussain, I.; Singh, B. Combined LMS-LMF-based control algorithm of DSTATCOM for power quality enhancement in distribution system. IEEE Trans. Ind. Electron. 2016, 63, 4160–4168. [Google Scholar] [CrossRef]
- Ranjan, A.; Kewat, S.; Singh, B. Reweighted zero attracting maximum correntropy criterion algorithm based solar grid interfaced system for alleviating power quality problems. In Proceedings of the IEEE 9th Power India International Conference (PIICON 2020), Sonepat, India, 28 February–1 March 2020; pp. 3–8. [Google Scholar] [CrossRef]
- Chankaya, M.; Hussain, I.; Ahmad, A. Variable parameter zero-attracting least mean square control of multifunctional PV-Battery-Fuel Cell Grid-tied system. Int. J. Power Energy Syst. 2021. [Google Scholar] [CrossRef]
- Chankaya, M.; Ahmad, A.; Hussain, I. Adaptive Kernel Width Maximum Correntropy Criteria based VSC contorl of grid-tied PV-BESS System. Presented at the 1st International Conference on Power Electronics and Energy, Bhubaneswar, India, 2–3 January 2021. [Google Scholar]
- Shen, M.; Xiong, K.; Wang, S. Multikernel adaptive filtering based on random features approximation. Signal Process. 2020, 176, 107712. [Google Scholar] [CrossRef]
- Hu, J.; Shan, Y.; Guerrero, J.M.; Ioinovici, A.; Chan, K.W.; Rodriguez, J. Model predictive control of microgrids—An overview. Renew. Sustain. Energy Rev. 2021, 136, 110422. [Google Scholar] [CrossRef]
- Vazquez, S.; Rodriguez, J.; Rivera, M.; Franquelo, L.G.; Norambuena, M. Model predictive control for power converters and drives: Advances and trends. IEEE Trans. Ind. Electron. 2017, 64, 935–947. [Google Scholar] [CrossRef] [Green Version]
- Chang, K.; Lin, G. Optimal design of hybrid renewable energy systems using simulation optimization. Simul. Model. Pract. Theory 2015, 52, 40–51. [Google Scholar] [CrossRef]
- Kow, K.W.; Wong, Y.W.; Rajkumar, R.K.; Rajkumar, R.K. A review on performance of artificial intelligence and conventional method in mitigating PV grid-tied related power quality events. Renew. Sustain. Energy Rev. 2016, 56, 334–346. [Google Scholar] [CrossRef]
- Elvira, D.G.; Blaví, H.V.; Pastor, À.C.; Salamero, L.M. Efficiency optimization of a variable bus voltage DC microgrid. Energies 2018, 11, 3090. [Google Scholar] [CrossRef] [Green Version]
- Chankaya, M.; Hussain, I.; Ahmad, A.; Khan, I.; Muyeen, S.M. Nyström minimum Kernel risk-sensitive loss based seamless control of grid-tied PV-hybrid energy storage system. Energies 2021, 14, 1365. [Google Scholar] [CrossRef]
- Alturki, F.A.; Omotoso, H.O.; Al-Shamma’a, A.A.; Farh, H.M.H.; Alsharabi, K. Novel manta rays foraging optimization algorithm based optimal control for grid-connected PV energy system. IEEE Access 2020, 8, 187276–187290. [Google Scholar] [CrossRef]
- Mishra, S.; Ray, P.K. Power quality improvement using photovoltaic fed DSTATCOM based on JAYA optimization. IEEE Trans. Sustain. Energy 2016, 7, 1672–1680. [Google Scholar] [CrossRef]
- Zhang, Y.; Jin, Z.; Mirjalili, S. Generalized normal distribution optimization and its applications in parameter extraction of photovoltaic models. Energy Convers. Manag. 2020, 224, 113301. [Google Scholar] [CrossRef]
- Mahmood, H.; Jiang, J. A control strategy of a distributed generation unit for seamless transfer between grid connected and islanded modes. In Proceedings of the IEEE 23rd International Symposium on Industrial Electronics (ISIE), Istanbul, Turkey, 1–4 June 2014; pp. 2518–2523. [Google Scholar] [CrossRef]
- Shen, G.; Xu, D.; Lu, Y. A novel seamless transfer control strategy based on voltage amplitude regulation for utility-interconnected fuel cell inverters with an LCL-filter. In Proceedings of the 37th IEEE Power Electronics Specialists Conference, Jeju, Korea, 18–22 June 2006; pp. 1–6. [Google Scholar] [CrossRef]
- Shoeiby, B.; Davoodnezhad, R.; Holmes, D.G.; Mcgrath, B.P. A resonant current regulator based microgrid control strategy with smooth transition between islanded and grid-connected modes. In Proceedings of the IEEE 5th International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Galway, Ireland, 24–27 June 2014; pp. 1–8. [Google Scholar] [CrossRef]
- Yong, S.; Jianhui, S. A seamless mode transfer method for microgrid based on mode adaptive droop control. In Proceedings of the IEEE International Conference of IEEE Region 10 (TENCON 2013), Xi’an, China, 22–25 October 2013; pp. 1–5. [Google Scholar] [CrossRef]
- Hajiaghasi, S.; Salemnia, A.; Hamzeh, M. Hybrid energy storage system for microgrids applications: A review. J. Energy Storage 2019, 21, 543–570. [Google Scholar] [CrossRef]
- Sinha, S.; Bajpai, P. Power management of hybrid energy storage system in a standalone DC microgrid. J. Energy Storage 2020, 30, 101523. [Google Scholar] [CrossRef]
- Singh, P.; Lather, J.S. Dynamic power management and control for low voltage DC microgrid with hybrid energy storage system using hybrid bat search algorithm and artificial neural network. J. Energy Storage 2020, 32, 101974. [Google Scholar] [CrossRef]
- IEEE Recommended Practice and Requirements for Harmonic Control in Electric Power Systems; IEEE Std: Piscataway, NJ, USA, 2014; pp. 519–2014.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Quantity | MCC | AKWMCC | MRFKMP |
|---|---|---|---|
| vSa | 0.56% | 0.60% | 0.62% |
| iSa iLa | 1.48% 39.61% | 1.34% 39.61% | 1.30% 39.61% |
| Parameters | LMS | LMF | MCC | AKWMCC | MRFKMP |
|---|---|---|---|---|---|
| Steady-state error | 1.428% | 1.257% | 0.857% | 0.5% | 0.114% |
| Convergence Speed Computational Burden | 13.5 ms Less | 17.7 ms Less | 16.5 ms Moderate | 23 ms Moderate | 32 ms High |
| Dynamic State Transients (Abnormal Grid Voltage) | 4.117% | 3.957% | 2.362% | 1.785% | 0.928% |
| Dynamic State Transients (Irradiation change) | 4.1% | 3.857% | 2.184% | 1.428% | 0.714% |
| Dynamic State Transients (Unbalanced Load) | 1.814% | 1.643% | 0.727% | 0.585% | 0.257% |
| Dynamic State Transients (Abnormal Grid Voltage) | 4.285% | 3.741% | 1.071% | 0.857% | 0.285% |
| Seamless transition of VSC control duration | 4 cycles | 4 cycles | 3 cycles | 2 cycles | 2 cycles |
| Optimization Technique | ||
|---|---|---|
| Initial gains | 1 | 0 |
| GA tuned PI gains GA with pattern search tuned PI gains | 0.68274 0.184228 | 0.26343 0.066836 |
| GNDO tuned PI gains | 0.162588 | 0.144438 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chankaya, M.; Hussain, I.; Ahmad, A.; Malik, H.; García Márquez, F.P. Generalized Normal Distribution Algorithm-Based Control of 3-Phase 4-Wire Grid-Tied PV-Hybrid Energy Storage System. Energies 2021, 14, 4355. https://doi.org/10.3390/en14144355
Chankaya M, Hussain I, Ahmad A, Malik H, García Márquez FP. Generalized Normal Distribution Algorithm-Based Control of 3-Phase 4-Wire Grid-Tied PV-Hybrid Energy Storage System. Energies. 2021; 14(14):4355. https://doi.org/10.3390/en14144355
Chicago/Turabian StyleChankaya, Mukul, Ikhlaq Hussain, Aijaz Ahmad, Hasmat Malik, and Fausto Pedro García Márquez. 2021. "Generalized Normal Distribution Algorithm-Based Control of 3-Phase 4-Wire Grid-Tied PV-Hybrid Energy Storage System" Energies 14, no. 14: 4355. https://doi.org/10.3390/en14144355
APA StyleChankaya, M., Hussain, I., Ahmad, A., Malik, H., & García Márquez, F. P. (2021). Generalized Normal Distribution Algorithm-Based Control of 3-Phase 4-Wire Grid-Tied PV-Hybrid Energy Storage System. Energies, 14(14), 4355. https://doi.org/10.3390/en14144355