
Harmonic Detection for Shunt Active Power Filter Using ADALINE Neural Network


Abstract
:1. Introduction
2. Harmonic Detection and Power Factor Improvement
2.1. Instantaneous Reactive Power Theory
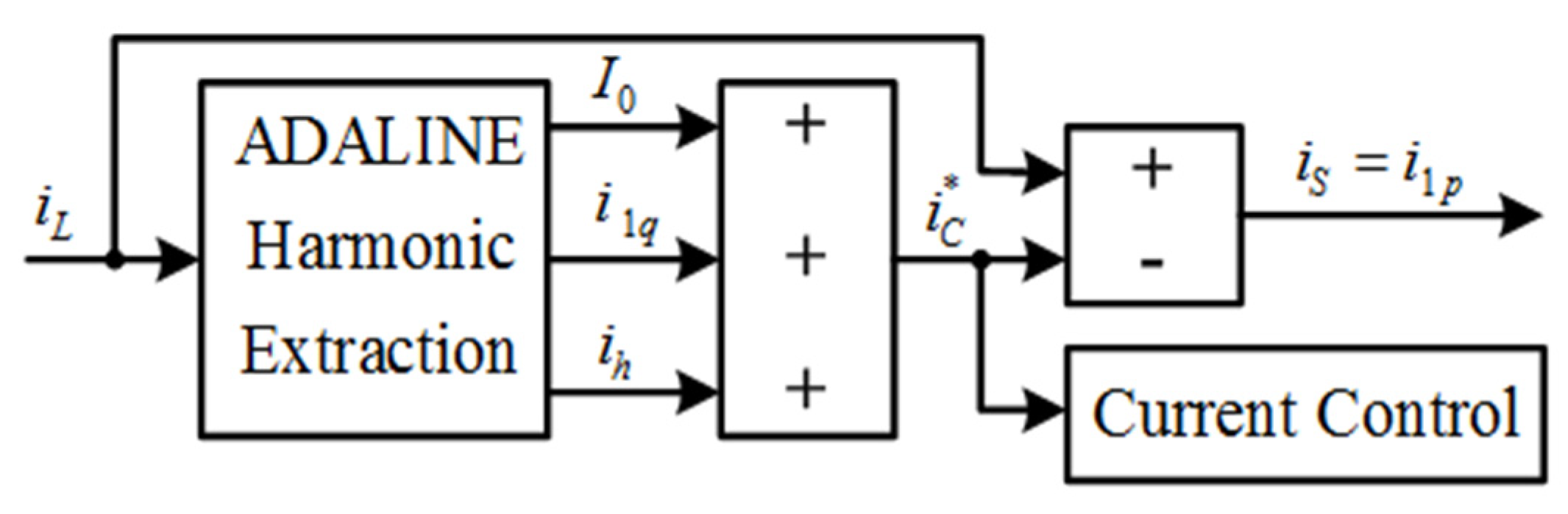
2.2. ADALINE Neural Network
3. Active Power Filter System
3.1. System Parameter and Controller Design
3.2. System Simulation
4. Results and Discussion
4.1. All Harmonic Orders Elimination
4.1.1. Case 1: Odd and Even Harmonic Load
4.1.2. Case 2: Harmonic Load with DC Component
4.1.3. Case 3: Bridge Rectifier Load
4.2. Some Harmonic Orders Elimination
4.2.1. Case 1: 5th Order Elimination
4.2.2. Case 2: 5th and 7th Orders Elimination
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Jawad Ghorbani, M.; Mokhtari, H. Impact of Harmonics on Power Quality and Losses in Impact of Harmonics on Power Quality and Losses in. Int. J. Electr. Comput. Eng. 2015, 5, 166–174. [Google Scholar]
- Benchaita, L.; Saadate, S.; Salemnia, A. A Comparison of Voltage Source and Current Source Shunt Active Filter by Simulation and Experimentation. IEEE Trans. Power Syst. 1999, 14, 642–647. [Google Scholar] [CrossRef]
- Zouidi, A.; Fnaiech, F.; Al-Haddad, K. Voltage source Inverter Based three-phase shunt active Power Filter: Topology, Modeling and Control Strategies. In Proceedings of the 2006 IEEE International Symposium on Industrial Electronics, Montreal, QC, Canada, 9–12 July 2006; pp. 785–790. [Google Scholar]
- IEEE Power and Energy Society. IEEE Std 519™-2014: IEEE Recommended Practice and Requirements for Harmonic Control in Electric Power Systems. 27 March 2014. Available online: https://ieeexplore.ieee.org/servlet/opac?punumber=6826457 (accessed on 1 April 2021).
- Desai, V.A.; Rathore, S. Harmonic detection using Kalman filter. In Proceedings of the 2016 International Conference on Electrical, Electronics, and Optimization Techniques (ICEEOT), Chennai, India, 3–5 March 2016; pp. 858–863. [Google Scholar]
- Solomon, O.M. The Use of DFT Windows in Signal-to-Noise Ratio and Harmonic Distortion Computations. IEEE Trans. Instrum. Meas. 1994, 43, 194–199. [Google Scholar] [CrossRef]
- Tiyarachakun, S.; Areerak, K.-L.; Areerak, K.-N. Instantaneous Power Theory with Fourier and Optimal Predictive Controller Design for Shunt Active Power Filter. Model. Simul. Eng. 2014, 1–20. [Google Scholar] [CrossRef] [Green Version]
- El-Habrouk, M.; Darwish, M.K. Design and implementation of a modified Fourier analysis harmonic current computation technique for power active filters using DSPs. IEE Proc. Electr. Power Appl. 2001, 148, 21–28. [Google Scholar] [CrossRef] [Green Version]
- Chang, G.W.; Chen, S.K. An a-b-c Reference Frame-Based Control Strategy for the Three-phase Four-Wire Shunt Active Power Filter. In Proceedings of the IEEE Proceedings: 9th International Conference on Harmonics and Quality of Power, Orlando, FL, USA, 1–4 October 2000; pp. 26–29. [Google Scholar]
- Karimi, H.; Karimi-Ghartemani, M.; Reza Iravani, M.; Bakhshai, A.R. An adaptive filter for synchronous extraction of harmonics and distortions. IEEE Trans. Power Deliv. 2003, 18, 1350–1356. [Google Scholar] [CrossRef]
- Musa, S.; Mohd Radzi, M.A.; Hoon, Y. Modified Synchronous Reference Frame Based Shunt Active Power Filter with Fuzzy Logic Control Pulse Width Modulation Inverter. Energies 2017, 10, 758. [Google Scholar] [CrossRef]
- Narongrit, T.; Areerak, K.-L.; Areerak, K.-N. A New Design Approach of Fuzzy Controller for Shunt Active Power Filter. Electr. Power Compon. Syst. 2015, 43, 685–694. [Google Scholar] [CrossRef]
- Sujitjorn, S.; Areerak, K.-L.; Kulworawanichpong, T. The DQ Axis with Fourier (DQF) Method for Harmonic Identification. IEEE Trans. Power Deliv. 2007, 22, 737–739. [Google Scholar] [CrossRef]
- Jiying, S.; Sha, W. Specific Harmonic Current Detection based on DC Component. In Proceedings of the 2011 International Conference on Electronics, Communications and Control (ICECC), Ningbo, China, 9–11 September 2011; pp. 2294–2297. [Google Scholar]
- Chang, G.W.; Shee, T.-C. A Comparative Study of Active Power Filter Reference Compensation Approaches. In Proceedings of the IEEE Conference on Power Engineering Society Summer Meeting, Chicago, IL, USA, 21–25 July 2002; pp. 1021–1027. [Google Scholar]
- Chen, D.; Xie, S. Review of the control strategies applied to active power filters. In Proceedings of the 2004 IEEE International Conference on Electric Utility Deregulation Restructuring and Power Technologies, Hong Kong, China, 5–8 April 2004; pp. 666–670. [Google Scholar]
- Chang, G.W.; Shee, T.-C. A Novel Reference Compensation Current Strategy for Shunt Active Power Filter Control. IEEE Trans. Power Deliv. 2004, 19, 1751–1758. [Google Scholar] [CrossRef]
- Montero, M.I.M.; Cadaval, E.R.; González, F.B. Comparison of Control Strategies for Shunt Active Power Filters in Three-Phase Four-Wire Systems. IEEE Trans. Power Electron. 2007, 22, 229–236. [Google Scholar] [CrossRef]
- Abdelkhalek, O.; Benachaiba, C. Sensitivity Assessment of PQ Theory and Synchronous Detection Identification Methods of Current Harmonics Under Non-Sinnusoidal Condition for Shunt Active Power Filter. J. Electr. Electron. Eng. 2009, 9, 801–807. [Google Scholar]
- Kullarkar, V.T.; Chandrakar, V.K. Power Quality Analysis in Power System with Non Linear Load. Int. J. Electr. Eng. 2017, 10, 33–45. [Google Scholar]
- Stošović, M.A.; Dimitrijević, M.; Bojanić, S.; Nieto-Taladriz, O.; Litovski, V. Characterization of Nonlinear Loads in Power Distribution Grid. Facta Univ. Ser. Electron. Energy 2016, 29, 159–175. [Google Scholar] [CrossRef]
- Moschakis, M.N.; Dafopoulos, V.V.; Karapidakis, E.S.; Tsikalakis, A.G. An analytical Assessment of DC Components Generated by Renewable Energy Resources with Inverter-Based Interconnection System due to Even Harmonics. Int. Sch. Res. Netw. ISRN Renew. Energy 2012, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Buticchi, G.; Lorenzani, E.; Fratta, A. A New Proposal to Eliminate the DC Current Component at the Point of Common Coupling for Grid Connected Systems. In Proceedings of the IECON 2010—36th Annual Conference on IEEE Industrial Electronics Society, Glendale, AZ, USA, 7–10 November 2010; pp. 3244–3249. [Google Scholar]
- Jadeja1, P.; Shrivastava, A. Effects of DC Components on Circuit Breaker. Int. J. Sci. Res. 2015, 4, 724–728. [Google Scholar]
- Buticchi, G.; Lorenzani, E. Detection Method of the DC Bias in Distribution Power Transformers. IEEE Trans. Ind. Electron. 2013, 60, 3539–3549. [Google Scholar] [CrossRef]
- El Shatshat, R.; Kazerani, M.; Salama, M.M.A. Modular Active Power-Line Conditioner. IEEE Trans. Power Deliv. 2001, 16, 700–709. [Google Scholar] [CrossRef]
- Dehini, R.; Bassou, A.; Ferdi, B. The harmonics detection method based on neural network applied to harmonics compensation. Int. J. Eng. Sci. Technol. 2010, 2, 258–267. [Google Scholar] [CrossRef]
- Nguyen, N.K.; Wira, P.; Flieller, D.; Abdeslam, D.O.; Merckle, J. Harmonics Identification with Artificial Neural Networks: Application to Active Power Filtering. Int. J. Emerg. Electr. Power Syst. 2011, 12, 1–27. [Google Scholar] [CrossRef]
- Valtierra-Rodriguez, M.; Romero-Troncoso, R.D.J.; Osornio-Rios, R.A.; Garcia-Perez, A. Detection and Classification of Single and Combined Power Quality Disturbances Using Neural Networks. IEEE Trans. Ind. Electron. 2014, 61, 2473–2482. [Google Scholar] [CrossRef]
- Sekaran, E.C.; Anbalagan, P. Comparison of Neural Network and Fast Fourier Transform Based Selective Harmonic Extraction and Total Harmonic Reduction for Power Electronic Converters. Asian Power Electron. J. 2008, 2, 1–9. [Google Scholar]
- Hagan, M.T.; Demuth, H.B.; Beale, M.H.; De Jesús, O. Widrow-Hoff Learning. In Neural Network Design, 2nd ed.; Available online: https://hagan.okstate.edu/nnd.html (accessed on 15 March 2019).
- Zhang, M.; Wang, Y.; Cheng, C.; Xu, J.; He, S.; Hu, Y. Research on Harmonic Detection Method Based on Wavelet Neural Network with a New Structure. In Proceedings of the 2021 3rd Asia Energy and Electrical Engineering Symposium (AEEES), Chengdu, China, 26–29 March 2021; pp. 316–319. [Google Scholar]
- Severoglu, N.; Salor, O. Amplitude and phase estimations of power system harmonics using deep learning framework. IET Gener. Transm. Distrib. 2020, 14, 4089–4096. [Google Scholar] [CrossRef]
- Sahoo, B.; Panda, A.K.; Mangaraj, M.; Sahoo, G.M. Real-Time Implementation of ALMS-NN Controlled UPQC. In Proceedings of the 2020 IEEE International Conference on Computational Intelligence for Smart Power System and Sustainable Energy (CISPSSE-2020), Keonjhar, India, 29–31 July 2020; pp. 1–6. [Google Scholar]
- Uddin, M.N.; Amin, T. Design and Simulation of Active Power Filter Based on Feed Forward Neural Network for Harmonic Detection and Elimination. In Proceedings of the 2020 International Conference on Computer, Electrical & Communication Engineering (ICCECE), Kolkata, India, 17–18 January 2020; pp. 1–6. [Google Scholar]
- Garcia, C.I.; Grasso, F.; Luchetta, A.; Piccirilli, M.C.; Paolucci, L.; Talluri, G. A Comparison of Power Quality Disturbance Detection and Classification Methods Using CNN, LSTM and CNN-LSTM. Appl. Sci. 2020, 10, 6755. [Google Scholar] [CrossRef]
- Ingram, D.M.E.; Round, S.D. A Novel Digital Hysteresis Current Controller for an Active Power Filter. In Proceedings of the Second International Conference on Power Electronics and Drive Systems, Singapore, 26–29 May 1997; pp. 744–749. [Google Scholar]
- Thomas, T.; Haddad, K.; Joos, G.; Jaafari, A. Design and Performance of Active Power Filters. IEEE Ind. Appl. Mag. 1998, 4, 38–46. [Google Scholar] [CrossRef]
- Rahmani, S.; Mendalek, N.; Al-Haddad, K. Experimental Design of a Nonlinear Control Technique for Three-Phase Shunt Active Power Filter. IEEE Trans. Ind. Electron. 2010, 57, 3364–3375. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Power Source | Phase voltage = 100 Vrms Fundamental frequency = 50 Hz |
| Active Power Filter | ) = 360 V ) = 18 mH |
| Sampling Time | s |
| Current Loop Controller |
| Performance | s | s | ||||
|---|---|---|---|---|---|---|
| Before Compensation | After Compensation | Before Compensation | After Compensation | |||
| PQ | ADALINE | PQ | ADALINE | |||
| %THD | 24 | 2.12 | 1.99 | 34.25 | 2.21 | 2.16 |
| Power Angle (Degree) | 30 | 0 | 0 | 30 | 0 | 0 |
| PF | 0.87 | 1 | 1 | 0.87 | 1 | 1 |
| Performance | s | s | ||||
|---|---|---|---|---|---|---|
| Before Compensation | After Compensation | Before Compensation | After Compensation | |||
| PQ | ADALINE | PQ | ADALINE | |||
| %THD | 30 | 1.71 | 1.56 | 30 | 11.27 | 2.93 |
| Power Angle (Degree) | 30 | 0 | 0 | 30 | 0 | 0 |
| PF | 0.87 | 1 | 1 | 0.87 | 1 | 1 |
| Performance | s | s | ||||
|---|---|---|---|---|---|---|
| Before Compensation | After Compensation | Before Compensation | After Compensation | |||
| PQ | ADALINE | PQ | ADALINE | |||
| %THD | 26.67 | 2.6 | 2.49 | 24.93 | 2.01 | 1.95 |
| Power Angle (Degree) | 7.63 | 0 | 0 | 10.71 | 0 | 0 |
| PF | 0.99 | 1 | 1 | 0.98 | 1 | 1 |
| Performance | s | s | ||
|---|---|---|---|---|
| Before Compensation | After Compensation | Before Compensation | After Compensation | |
| %THD | 26.66 | 18.13 | 24.92 | 16.17 |
| Power Angle (Degree) | 7.64 | 0 | 10.71 | 0 |
| PF | 0.99 | 1 | 0.98 | 1 |
| Performance | s | s | ||
|---|---|---|---|---|
| Before Compensation | After Compensation | Before Compensation | After Compensation | |
| %THD | 26.66 | 12.43 | 24.92 | 10.00 |
| Power Angle (Degree) | 7.64 | 0 | 10.71 | 0 |
| PF | 0.99 | 1 | 0.98 | 1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Janpong, S.; Areerak, K.; Areerak, K. Harmonic Detection for Shunt Active Power Filter Using ADALINE Neural Network. Energies 2021, 14, 4351. https://doi.org/10.3390/en14144351
Janpong S, Areerak K, Areerak K. Harmonic Detection for Shunt Active Power Filter Using ADALINE Neural Network. Energies. 2021; 14(14):4351. https://doi.org/10.3390/en14144351
Chicago/Turabian StyleJanpong, Sarawut, Kongpol Areerak, and Kongpan Areerak. 2021. "Harmonic Detection for Shunt Active Power Filter Using ADALINE Neural Network" Energies 14, no. 14: 4351. https://doi.org/10.3390/en14144351
APA StyleJanpong, S., Areerak, K., & Areerak, K. (2021). Harmonic Detection for Shunt Active Power Filter Using ADALINE Neural Network. Energies, 14(14), 4351. https://doi.org/10.3390/en14144351