
Multi-Objective Electrical Power System Design Optimization Using a Modified Bat Algorithm


Abstract
:1. Introduction
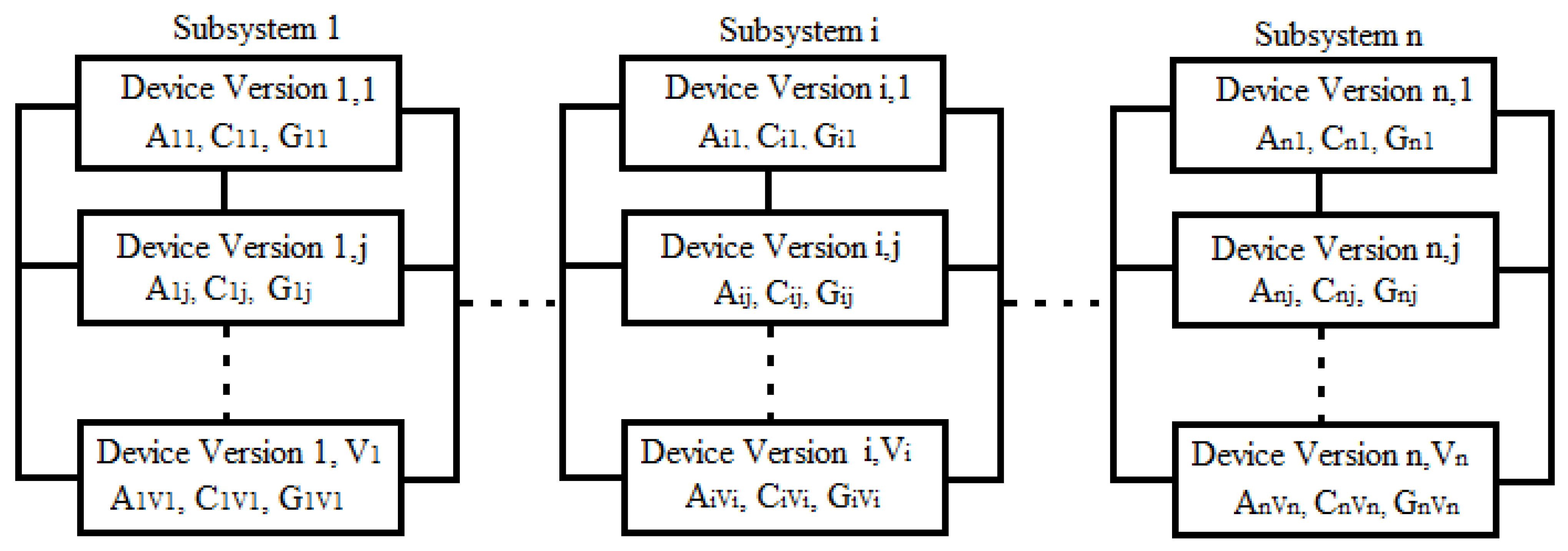
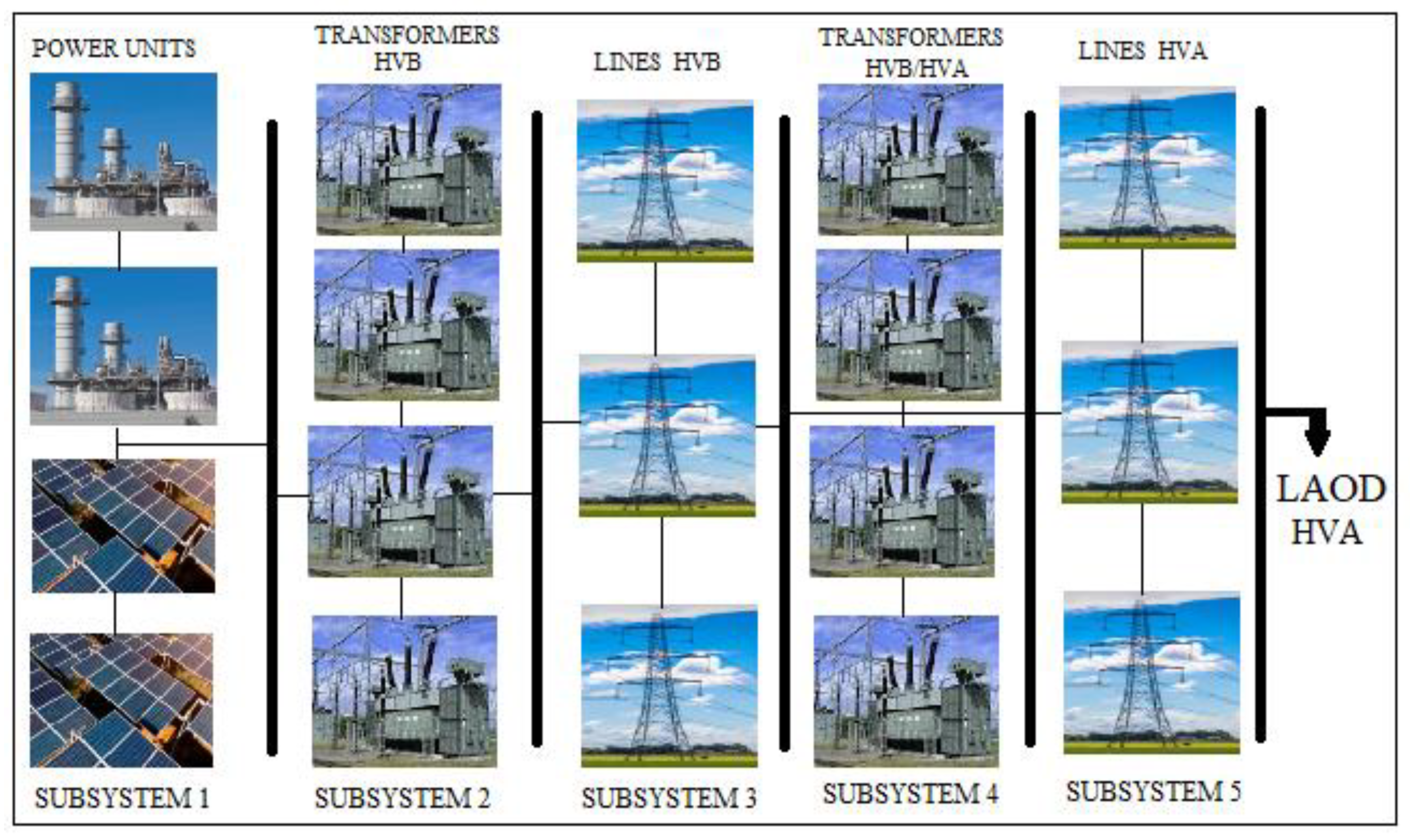
2. Redundancy Energy System Design Optimization Problems
2.1. Bi-Objective Optimization (First Problem)
2.2. Multi-Objective Optimization (Second Problem)
3. Combined Approaches
3.1. Reliability Estimation Technique
3.1.1. Parallel Elements
3.1.2. Series Device
3.1.3. Reliability of the Demand Model
3.2. Redundancy Optimization Method
3.2.1. The Bat Algorithm (BA)
3.2.2. The Generalized Evolutionary Walk Algorithm
3.2.3. Bat Algorithm with Evolutionary Generalized Flight (BAG)
| Algorithm 1: Hybridization of the GEWA and BAT in the BAG algorithm. |
| 1 BAG(Nbr_iter: generations number, nb:number of bats) 2 Wmin,wmax, δ, d, αG: GEWA coefficients to be initialized 3 Define objective function f(x), x = (x1…,xnb) 4 Generate a bat population xiand speedsvi, 0 < α < 1; γ > 0 5 Set fmin = 0; fmax = 100; 6 Initialize pulse frequenciesfi: fmin + (fmax − fmin)rand() 7 Initializes pulse: ri0[0.1] and intensities: Ai[1.2]. 8 Evaluate objective function:Fitness(i) ←f(xi), besti←xi 9 Determine the best overall fitnessfgbest←min(fi) and itsgbestpositionand bad fitness 10 fgworst←max(fi) 11 While (index < Nbr_generation) do 12 εiter← uniform(0,δ) 13 Fori←1tonb do 14 if(f (xi) == fgworst) 15 if(rand < αG) 16 w←εindex*d//Flight depends on thestep 17 xi←gbest + w//dependentontheglobalbest 18 else 19 x←wmin + (wmax − wmin)εindex//randomflightin the field 20 End if Else 21 else 22 fi←fmin + (fmax − fmin)rand()//rand [0,1],Adjustedfrequencies 23 vi←vi + (xi − gbest)fi//velocitiesupdate 24 xi←besti + vi//Generate new bats 25 if(rand > ri) 26 xi←gbest+ random(−1,1).Amoy otherwise 27 xi←besti+random(−1,1).Amoy 28 End if 29 if rand < Aiand f(xi) < fitness(i) 30 besti←xi//Accept new solutions 31 ri←ri0(1-exp(-γ.index))//Incrementri 32 Ai←αAi//α] 0, 1[, reduce Ai 33 End if 34 End if else 35 End For 36 Sort bats and save the current bestgbestsolutionandUpdatefgworst 37 index++ 38 End While 39 End |
4. Computational Experimentation and Results
4.1. Data
4.1.1. First Example
4.1.2. Second Example
4.2. Results and Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| ROP | Redundancy optimization problem |
| MSS | Multi states system |
| UMGF | Universal moment generating function |
| LOLP | Loss of Load Probability |
| BA | Bat algorithm |
| GEWA | Generalized Evolutionary Walk Algorithm |
| BAG | Bat Algorithm with Generalized flight |
| NP | Nondeterministic polynomial |
| DC | Direct current |
| NSGA | Nondominated Sorting Genetic Algorithm |
| BSO | Boundary simplified swarm optimization |
| SBS | Self-boundary search |
| UM2 | Update mechanism |
| SSO | Simplified swarm optimization |
| PBSO | Partitioning-based simulation optimization |
| MA | Memetic algorithm |
| DRL | Deep reinforcement learning |
| EADEPG | Expert-assistance deep deterministic policy gradient |
| Nomenclature | |
| Symbol | Meaning |
| Ci | Cost of electrical component i (mlm $) |
| Gi, Ξi | Performance of power component i (MW) |
| Ai, Ri | Reliability of power component i (%) |
| i,j,l | Respectively indices of series, versions and demand period interval |
| n | Number of series i |
| Vi | Number of Available electrical components technologies of type i |
| kij | Number of occurrence of component j in series i |
| Aij | Reliability of power component j of type i (%) |
| A0 | Minimum avaibilityrequired (%) |
| C0 | Maximum cost required (mlm $) |
| G0 | Minimum performance required (MW) |
| M | Number of demand period interval |
| Kmax | Maximum number that can be taken from each component j |
| Pi | Performance probability of i-th device |
| Qi | Performance probability of j-th device |
| W | Demand levels |
| Operator for parallel device | |
| Operator for series device | |
| f | Frequency |
| v | Velocities |
| Xi | Intensity |
| Ai | Average sound level bats |
| ri | pulsation rate |
| εt | Gaussian distribution |
| xt | wrong walkers |
| gbest | Best global solution |
| ri0 | Starting pulsation rate |
| t | Rank of the current algorithm generation |
| d | Length vector follows the solutions definition dimension |
| N | Normal distribution |
| w | Boundaries |
| XtW | Worst walkers |
| HVB | High voltage class B |
| HVA | High voltage class A |
| Wm | Demand level |
| Tm | Time interval |
References
- Koutras, V.P.; Malefaki, S.; Platis, A.N. Optimization of the dependability and performance measures of a generic model for multi-state deteriorating systems under maintenance. Reliab. Eng. Syst. Saf. 2017, 166, 73–86. [Google Scholar] [CrossRef]
- Nguyen, T.K.; Beugin, J.; Marais, J. Method for evaluating an extended fault tree to analyse the dependability of complex systems: Application to a satellite-based railway system. Reliab. Eng. Syst. Saf. 2015, 133, 300–313. [Google Scholar] [CrossRef] [Green Version]
- Jiang, T.; Liu, Y. Parameter inference for non-repairable multi-state system reliability models by multi-level observation sequences. Reliab. Eng. Syst. Saf. 2017, 166, 3–15. [Google Scholar] [CrossRef]
- Coelho, L.d.S. Self-organizing migrating strategies applied to reliability-redundancy optimization of systems. IEEE Trans. Reliab. 2009, 58, 501–510. [Google Scholar] [CrossRef]
- Yingkui, G.; Jing, L. Multi-state system reliability: A new and systematic review. Procedia Eng. 2012, 29, 531–536. [Google Scholar] [CrossRef] [Green Version]
- Guerraiche, K.; Rahli, M.; Zeblah, A.; Dekhici, L. Series-parallel power system optimization using firefly algorithm. Int. J. Electr. Eng. Inform. 2015, 7, 89–101. [Google Scholar] [CrossRef]
- Mengyu, D.; Yan-Fu, L. An investigation of new local search strategies in memetic algorithm for redundancy allocation in multi-state series-parallel systems. Reliab. Eng. Syst. Saf. 2020, 195, 106703. [Google Scholar] [CrossRef]
- Huang, C.L.; Jiang, Y.; Yeh, W.C. Developing Model of Fuzzy Constraints Based on Redundancy Allocation Problem by an Improved Swarm Algorithm. IEEE Access 2020, 8, 155235–155247. [Google Scholar] [CrossRef]
- Karandeev, D.J.; Dulesov, A.S.; Bazhenov, R.I.; Karandeeva, I.J. Calculation of the optimal number of redundant elements of power systems using the Lagrange multipliers method and information theory. IOP Conf. Ser. Mater. Sci. Eng. 2020, 862, 1–6. [Google Scholar] [CrossRef]
- Wei, W.; Mingqiang, L.; Yongnian, F.; Xiaoping, L.; Hanghang, C. Multi-objective optimization of reliability-redundancy allocation problem for multi-type production systems considering redundancy strategies. Reliab. Eng. Syst. Saf. 2020, 193, 106681. [Google Scholar] [CrossRef]
- Yao, L.; Coolen, F.P.A.; Zhu, C.; Tan, J. Reliability assessment of the hydraulic system of wind turbines based on load-sharing using survival signature. Renew. Energy 2020, 153, 766–776. [Google Scholar] [CrossRef]
- Li, H.; Xie, X.; McDonald, A.; Chai, Z.; Yang, T.; Wu, Y.; Yang, W. Cost and reliability optimization of modular multilevel converter with hybrid submodule for offshore DC wind turbine. Int. J. Electr. Power Energy Syst. 2020, 120, 105994. [Google Scholar] [CrossRef]
- Wang, Y.; Lin, L. Heterogeneous redundancy allocation for series-parallel multi-state systems using hybrid particle swarm optimization and local search. IEEE Trans. Syst. Man Cybern. 2011, 42, 464–474. [Google Scholar] [CrossRef]
- Rami, A. Design and Meta-heuristics Methods Optimization for Electro-Energetics System. Ph.D. Thesis, University of sidi bel abbes, Sidi Bel Abbès, Algeria, 2010. [Google Scholar]
- Agarwal, M.; Vikas, K.S. Ant colony optimization algorithm for heterogeneous redundancy allocation in multi-state series-parallel systems. Int. J. Reliab. Qual. Saf. Eng. 2009, 16, 163–186. [Google Scholar] [CrossRef]
- Ouzineb, M.; Nourelfath, M.; Gendreau, M. A heuristic method for non homogeneous redundancy optimization of series-parallel multi-state systems. J. Heuristics 2011, 17, 1–22. [Google Scholar] [CrossRef]
- Rami, A.; Zeblah, A.; Hamdaoui, H.; Massim, Y.; Harrou, F. An efficient artificial immune algorithm for power system reliability optimization. Int. J. Power Energy Convers. 2009, 1, 178–197. [Google Scholar] [CrossRef]
- Guerraiche, K.; Rahli, M.; Zeblah, A.; Dekhici, L. Budgetary and redundancy optimization of heterogeneous series-parallel power systems under availability constraints. Energy Procedia 2015, 74, 547–554. [Google Scholar] [CrossRef] [Green Version]
- Guerraiche, K.; Rahli, M.; Zeblah, A.; Dekhici, L. Reliability Maximization of Power System Using Firey Algorithm. Int. Electr. Eng. J. 2016, 7, 2116–2123. [Google Scholar]
- Guerraiche, K.; Rahli, M.; Dekhici, L.; Zeblah, A. Conception optimale de redondance dans des systemesélectriquesparallèles-séries à l’aide des metaheuristiques. Revue Roumaine des Sciences Techniques Serie Électrotechnique et Énergétique 2018, 63, 46–51. [Google Scholar]
- Wei-Chang, Y. A novel boundary swarm optimization method for reliability redundancy allocation problems. Reliab. Eng. Syst. Saf. 2018, 192, 1–12. [Google Scholar] [CrossRef]
- Kayedpour, F.; Amiri, M.; Rafizadeh, M.; Arashshahryari, N. Multi-objective redundancy allocation problem for a system with repairable components considering instantaneous availability and strategy selection. Reliab. Eng. Syst. Saf. 2017, 160, 11–20. [Google Scholar] [CrossRef]
- AboueiArdakan, M.; Rezvan, M.T. Multi-objective optimization of reliability redundancy allocation problem with cold-standby strategy using NSGA-II. Reliab. Eng. Syst. Saf. 2018, 172, 225–238. [Google Scholar] [CrossRef]
- Kim, H.; Kim, P. Reliabilityredundancy allocation problem considering optimal redundancy strategy using parallel genetic algorithm. Reliab. Eng. Syst. Saf. 2017, 159, 153–160. [Google Scholar] [CrossRef]
- Kuo, H.C.; Kuo, P.Y. An efficient simulation optimization method for the generalized redundancy allocation problem. Eur. J. Oper. Res. 2018, 265, 1094–1101. [Google Scholar] [CrossRef]
- Wei, Z.; Quan, Z.; Wu, J.; Li, Y.; Pou, J.; Zhong, H. Deep deterministic policy gradient-drl enabled multiphysics-constrained fast charging of lithium-ion battery. IEEE Trans. Ind. Electron. 2021. [Google Scholar] [CrossRef]
- Wu, J.; Wei, Z.; Li, W.; Wang, Y.; Li, Y.; Sauer, D.U. Battery thermal- and health-constrained energy management for hybrid electric bus based on soft actor-critic drl algorithm. IEEE Trans. Ind. Inform. 2021, 17, 3751–3761. [Google Scholar] [CrossRef]
- Wu, J.; Wei, Z.; Liu, K.; Quan, Z.; Li, Y. Battery-involved energy management for hybrid electric bus based on expert-assistance deep deterministic policy gradient algorithm. IEEE Trans. Veh. Technol. 2020, 69, 12786–12796. [Google Scholar] [CrossRef]
- Zaretalab, A.; Hajipour, V.; Tavana, M. Redundancy allocation problem with multi-state component systems and reliable supplier selection. Reliab. Eng. Syst. Saf. 2020, 193, 106–629. [Google Scholar] [CrossRef]
- Xiang-Yu, L.; Yan-Feng, L.; Hong-Zhong, H. Redundancy allocation problem of phased-mission system with non-exponential components and mixed redundancy strategy. Reliab. Eng. Syst. Saf. 2020, 199, 106–903. [Google Scholar] [CrossRef]
- Lisnianski, A.; Levitin, G. Multi-state system reliability: Assessment, optimization and applications. World Sci. 2003, 376. [Google Scholar] [CrossRef]
- Ushakov, I. Reliability: Past, present, future. Recent Adv. Reliab. Theory 2000, 3–21. [Google Scholar] [CrossRef]
- Barlow, R.E.; Wu, A.S. Coherent systems with multi-state components. Math. Oper. Res. 1978, 3, 275–281. [Google Scholar] [CrossRef] [Green Version]
- El-neweihi, E.; Proschan, F.; Sethuraman, J. Multistate coherent systems. J. Appl. Probab. 1978, 15, 675–688. [Google Scholar] [CrossRef]
- Ushakov, I. Reliability analysis of multistate systems by means of a modified generating function. J. Inf. Process. Cybern. 1988, 24, 131–135. [Google Scholar]
- Ushakov, I. Universal generating function. Sov. J. Comput. Syst. Sci. 1986, 24, 118–129. [Google Scholar]
- Dekhici, L.; Belkadi, K. A bat algorithm with generalized walk for the two-stage hybrid flow shop problem. Int. J. Decis. Support Syst. Technol. 2015, 7, 1–16. [Google Scholar] [CrossRef]
- Dekhici, L.; Guerraiche, K.; Belkadi, K. Bat Algorithm with generalized fly for combinatorial production optimization problems: Case Studies. Tech. Inno. Know. Manag. Decis. Supp. 2019, 34–66. [Google Scholar] [CrossRef]
- Dekhici, L.; Guerraiche, K.; Belkadi, K. Environmental economic power dispatch using bat algorithm with generalized fly and evolutionary boundary constraint handling scheme. Int. J. Appl. Metaheuristic Comput. 2020, 11, 171–191. [Google Scholar] [CrossRef]
- Yang, X.S. A new metaheuristic bat-inspired algorithm. Nat. Inspired Coop. Strateg. Optim. 2010, 284, 65–74. [Google Scholar] [CrossRef] [Green Version]
- Dekhici, L.; Belkadi, K.; Guerraiche, K. Economic power dispatching with generalized evolutionary walk algorithm. In Proceedings of the 6th Multi-Conference on Computational Engineering in Systems Applications, Marrakech, Morocco, 24–26 March 2015; pp. 62–66. [Google Scholar]
- Cui, Z.; Cao, Y.; Cai, X.; Cai, J.; Chen, J. Optimal LEACH protocol with modified bat algorithm for big data sensing systems in Internet of Things. J. Parallel Distrib. Comput. 2019, 132, 217–229. [Google Scholar] [CrossRef]
- Osaba, E.; Yang, X.S.; Fister, I., Jr.; Del Ser, J.; Lopez-Garcia, P.; Vazquez-Pardavila, A.J. A discrete and improved bat algorithm for solving a medical goods distribution problem with pharmacological waste collection. Swarm Evol. Comput. 2019, 44, 273–286. [Google Scholar] [CrossRef]
- Dekhici, L. Reconfiguration et Ordonnancement Des Blocs Opératoires: Avec Etude de Cas; Editions Universitaireseropéennes: Sarrebruck, Allemagne, 2016; p. 192. Available online: www.editions-ue.com (accessed on 11 April 2016).
- Suárez, P.; Iglesias, A.; Gálvez, A. Make robots be bats: Specializing robotic swarms to the bat algorithm. Swarm Evol. Comput. 2019, 44, 113–129. [Google Scholar] [CrossRef]
- Lemma, T.A.; Hashim, F.B.M. Use of fuzzy systems and bat algorithm for energy modeling in a gas turbine generator. In Proceedings of the IEEE Colloquium on Humanities, Science and Engineering, Penang, Malaysia, 5–6 December 2011; pp. 305–310. [Google Scholar]
- Guerraiche, K.; Rahli, M.; Zeblah, A.; Dekhici, L. Bat algorithm to series-parallel power system design. Multi-Conferences on Computational Engineering in Systems Applications. In Proceedings of the 3rd Communications, Computing and Control Applications, Marrakech, Morocco, 24–26 March 2015; pp. 67–71. [Google Scholar]
- Roy, A.G.; Rakshit, P. Motion planning of non-holonomic wheeled robots using modified bat algorithm. Nat. Inspired Algorithms Big Data Framew. 2019, 94–123. [Google Scholar] [CrossRef]
- Shirjini, M.F.; Nikanjam, A.; Shoorehdeli, M.A. Stability analysis of the particle dynamics in bat algorithm: Standard and modified versions. Eng. Comput. 2020, 1–12. [Google Scholar] [CrossRef]
- Yildizdan, G.L.; Baykan, O.K. A novel modified bat algorithm hybridizing by differential evolution algorithm. Expert Syst. Appl. 2020, 141, 112949. [Google Scholar] [CrossRef]
- Yue, X.; Zhang, H. Modified hybrid bat algorithm with genetic crossover operation and smart inertia weight for multilevel image segmentation. Appl. Soft Comput. 2020, 90, 106157. [Google Scholar] [CrossRef]
- Bangyal, W.H.; Ahmed, J.; Rauf, H.T. A modified bat algorithm with torus walk for solving global optimization problems. Int. J. Bio-Inspired Comput. 2020, 15, 1–13. [Google Scholar] [CrossRef]
- Yang, X.S. Review of meta-heuristics and generalized evolutionary walk algorithm. Int. J. Bio-Inspired Comput. 2011, 3, 77–84. [Google Scholar] [CrossRef]
- Dekhici, L.; Belkadi, K. Generalized evolutionary walk algorithm for economic power dispatching. In Proceedings of the META’12, International Conference on Metaheuristics and Nature Inspired Computing, Port El Kantaoui, Tunisia, 27–31 October 2012. [Google Scholar]
- Levitin, G.; Lisnianski, A.; Elmakis, D. Structure optimization of power system with different redundant elements. Electr. Power Syst. Res. 1997, 43, 19–27. [Google Scholar] [CrossRef]
- Meziane, R.; Hamzi, A.; Boufala, S.; Amara, M. Hybrid solar gas reliability optimization using harmony search under performance and budget constraints. In 3rd International Symposium on Environmental Friendly Energies and Applications (EFEA); IEEE: Paris, France, 2014; pp. 1–8. [Google Scholar]
- Levitin, G.; Lisnianski, A.; Ben-Haim, H.; Elmakis, D. Redundancy optimization for series-parallel multi-state systems. Trans. Reliab. IEEE 1998, 47, 165–172. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sub-System | Version | Reliability R [%] | Cost C [mln $] | Performance G [MW] |
|---|---|---|---|---|
| Power Units | 1 | 0.994 | 77 | 65 |
| 2 | 0.988 | 64 | 60 | |
| 3 | 0.996 | 45 | 25 | |
| HVB Transformers | 1 | 0.996 | 2.805 | 120 |
| 2 | 0.992 | 2.272 | 100 | |
| 3 | 0.997 | 2.594 | 120 | |
| 4 | 0.993 | 2.569 | 100 | |
| 5 | 0.997 | 1.857 | 100 | |
| HVB Lines | 1 | 0.975 | 1.985 | 150 |
| 2 | 0.987 | 1.983 | 140 | |
| 3 | 0.971 | 1.842 | 140 | |
| 4 | 0.986 | 1.318 | 130 | |
| HVB/HVA Transformers | 1 | 0.992 | 0.842 | 60 |
| 2 | 0.982 | 0.875 | 80 | |
| 3 | 0.984 | 0.745 | 60 | |
| 4 | 0.983 | 0.654 | 40 | |
| 5 | 0.957 | 0.625 | 30 | |
| 6 | 0.968 | 0.608 | 40 | |
| 7 | 0.969 | 0.492 | 60 | |
| 8 | 0.979 | 0.415 | 30 | |
| HVA Lines | 1 | 0.988 | 0.456 | 30 |
| 2 | 0.959 | 0.432 | 40 | |
| 3 | 0.989 | 0.364 | 20 | |
| 4 | 0.981 | 0. 283 | 20 | |
| 5 | 0.968 | 0.242 | 10 |
| Wm [MW] | 140 | 125 | 100 | 60 |
| Tm [h] | 1752 | 1752 | 3504 | 1752 |
| Subsystems | Versions | Reliability A [%] | Cost C [mln $] | Capacity Ξ [MW] |
|---|---|---|---|---|
| Power Units | 1 | 0.980 | 0.590 | 120 |
| 2 | 0.977 | 0.535 | 100 | |
| 3 | 0.982 | 0.470 | 85 | |
| 4 | 0.978 | 0.420 | 85 | |
| 5 | 0.983 | 0.400 | 48 | |
| 6 | 0.920 | 0.180 | 31 | |
| 7 | 0.984 | 0.220 | 26 | |
| HVB Transformers | 1 | 0.995 | 0.205 | 100 |
| 2 | 0.996 | 0.189 | 92 | |
| 3 | 0.997 | 0.091 | 53 | |
| 4 | 0.997 | 0.056 | 28 | |
| 5 | 0.998 | 0.042 | 21 | |
| HVB Lines | 1 | 0.971 | 7.525 | 100 |
| 2 | 0.973 | 4.720 | 60 | |
| 3 | 0.971 | 3.590 | 40 | |
| 4 | 0.976 | 2.420 | 20 | |
| HVB/HVA Transformers | 1 | 0.977 | 0.180 | 115 |
| 2 | 0.978 | 0.160 | 100 | |
| 3 | 0.978 | 0.150 | 91 | |
| 4 | 0.983 | 0.121 | 72 | |
| 5 | 0.981 | 0.102 | 72 | |
| 6 | 0.971 | 0.096 | 72 | |
| 7 | 0.983 | 0.071 | 55 | |
| 8 | 0.982 | 0.049 | 25 | |
| 9 | 0.977 | 0.044 | 25 | |
| HVA Lines | 1 | 0.984 | 0.986 | 128 |
| 2 | 0.983 | 0.825 | 100 | |
| 3 | 0.987 | 0.490 | 60 | |
| 4 | 0.981 | 0. 475 | 51 |
| Wm [MW] | 100 | 80 | 50 | 200 |
| Tm [h] | 4208 | 788 | 1228 | 2536 |
| Bi-Objective Optimization: System Availability Maximization and System Cost Minimization | |||
|---|---|---|---|
| Data | Optimal Configuration | Reliability [%] | Cost [mln $] |
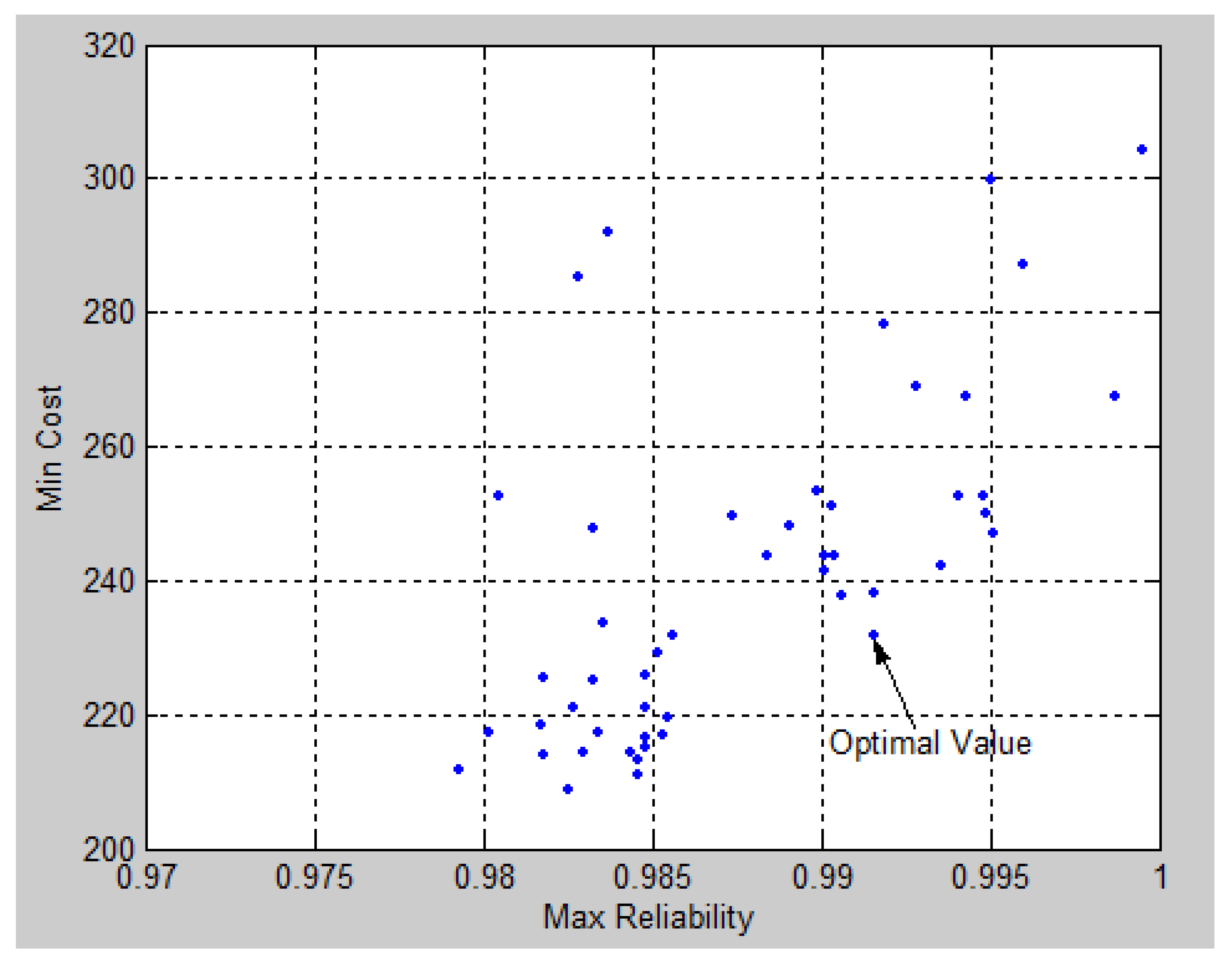
| Example 1 | Subsystem 1: 1(1)–2(2) | 99.16 | 231.6 |
| Subsystem 2: 1(1)–3(2)–1(5) | |||
| Subsystem 3: 2(2)–2(3)–1(4) | |||
| Subsystem 4: 2 (2)–1(4)–1(5) | |||
| Subsystem 5: 5(1)–2(2) | |||
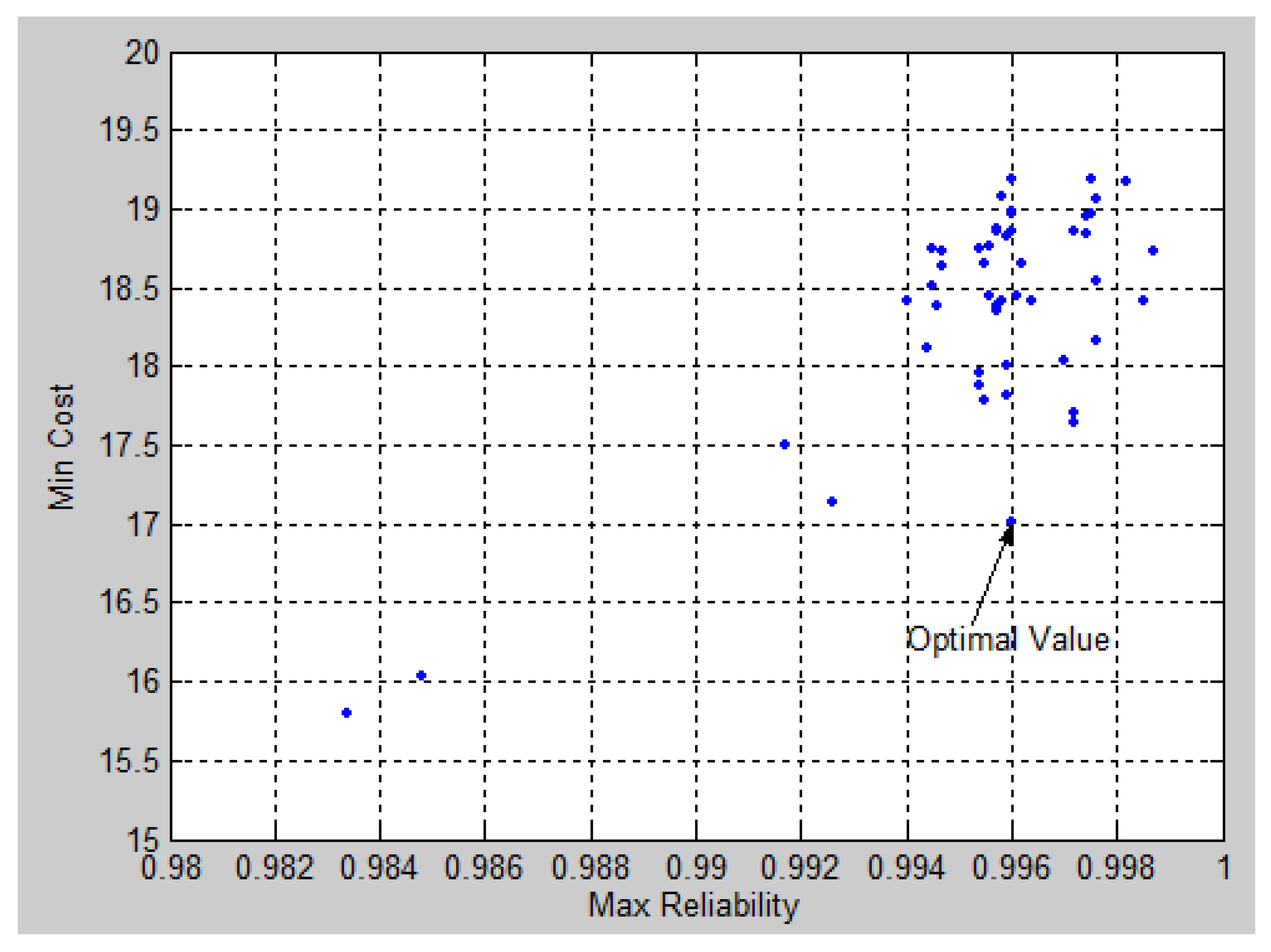
| Example 2 | Subsystem 1: 5(7) | 99.6 | 17.01 |
| Subsystem 2: 3(3)–2(4)–1(5) | |||
| Subsystem 3: 3(3)–1(4) | |||
| Subsystem 4: 2(8)–4(9)–1(5) | |||
| Subsystem 5: 2(1) | |||
| Multi-Objective Optimization: Maximization of System Availability, Minimization of System Cost and Maximization of System Performance | ||||
|---|---|---|---|---|
| Data | Optimal Configuration | Reliability [%] | Performance [MW] | Cost [mln $] |
| Example 1 | Subsystem 1: 1(1)–2(2) | 99.21 | 180 | 235.5 |
| Subsystem 2: 4(2)–2(3)–1(5) | ||||
| Subsystem 3: 4(4) | ||||
| Subsystem 4: 4(2)–1(3)–1(4) | ||||
| Subsystem 5: 4(1)–3(3) | ||||
| Example 2 | Subsystem 1: 1(2) | 99.42 | 100 | 16.88 |
| Subsystem 2: 6(5) | ||||
| Subsystem 3: 4(3) | ||||
| Subsystem 4: 6(9) | ||||
| Subsystem 5: 3(3) | ||||
| Subsystem | Bi-Objective | Multi-Objective | Best Cost Individually | |
|---|---|---|---|---|
| Best Solution | Best Solution | Optimized [20] | ||
| System Design | Subsystem 1 | 5(7) | 1(2) | 2(1) |
| Subsystem 2 | 3(3)–2(4)–1(5) | 6(5) | 3(2) | |
| Subsystem 3 | 3(3)–1(4) | 4(3) | 2(2) 3(1) | |
| Subsystem 4 | 2(8)–4(9)–1(5) | 6(9) | 6(1) 7(2) | |
| Subsystem 5 | 2(1) | 3(3) | 3(1) 4(2) | |
| Cost [mlm $] | 17.01 | 16.88 | 15.425 | |
| Reliability [%] | 99.66 | 99.42 | 99.1 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guerraiche, K.; Dekhici, L.; Chatelet, E.; Zeblah, A. Multi-Objective Electrical Power System Design Optimization Using a Modified Bat Algorithm. Energies 2021, 14, 3956. https://doi.org/10.3390/en14133956
Guerraiche K, Dekhici L, Chatelet E, Zeblah A. Multi-Objective Electrical Power System Design Optimization Using a Modified Bat Algorithm. Energies. 2021; 14(13):3956. https://doi.org/10.3390/en14133956
Chicago/Turabian StyleGuerraiche, Khaled, Latifa Dekhici, Eric Chatelet, and Abdelkader Zeblah. 2021. "Multi-Objective Electrical Power System Design Optimization Using a Modified Bat Algorithm" Energies 14, no. 13: 3956. https://doi.org/10.3390/en14133956
APA StyleGuerraiche, K., Dekhici, L., Chatelet, E., & Zeblah, A. (2021). Multi-Objective Electrical Power System Design Optimization Using a Modified Bat Algorithm. Energies, 14(13), 3956. https://doi.org/10.3390/en14133956