
The Sliding Window and SHAP Theory—An Improved System with a Long Short-Term Memory Network Model for State of Charge Prediction in Electric Vehicle Application


Abstract
:1. Introduction
2. Data Processing and Methods Application
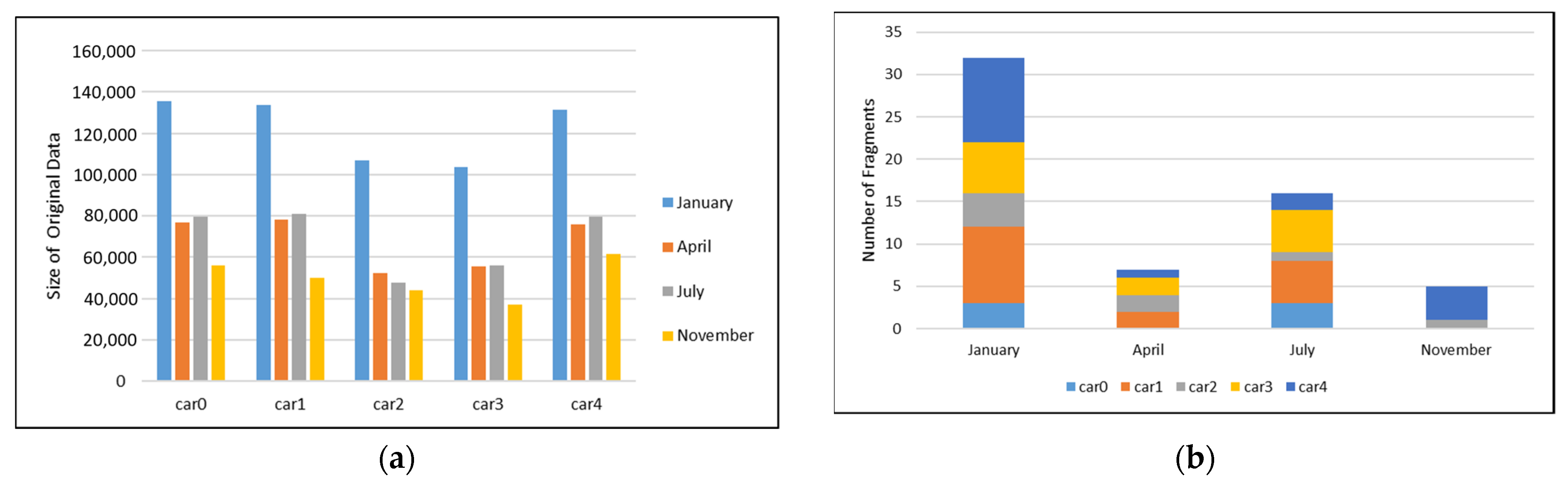
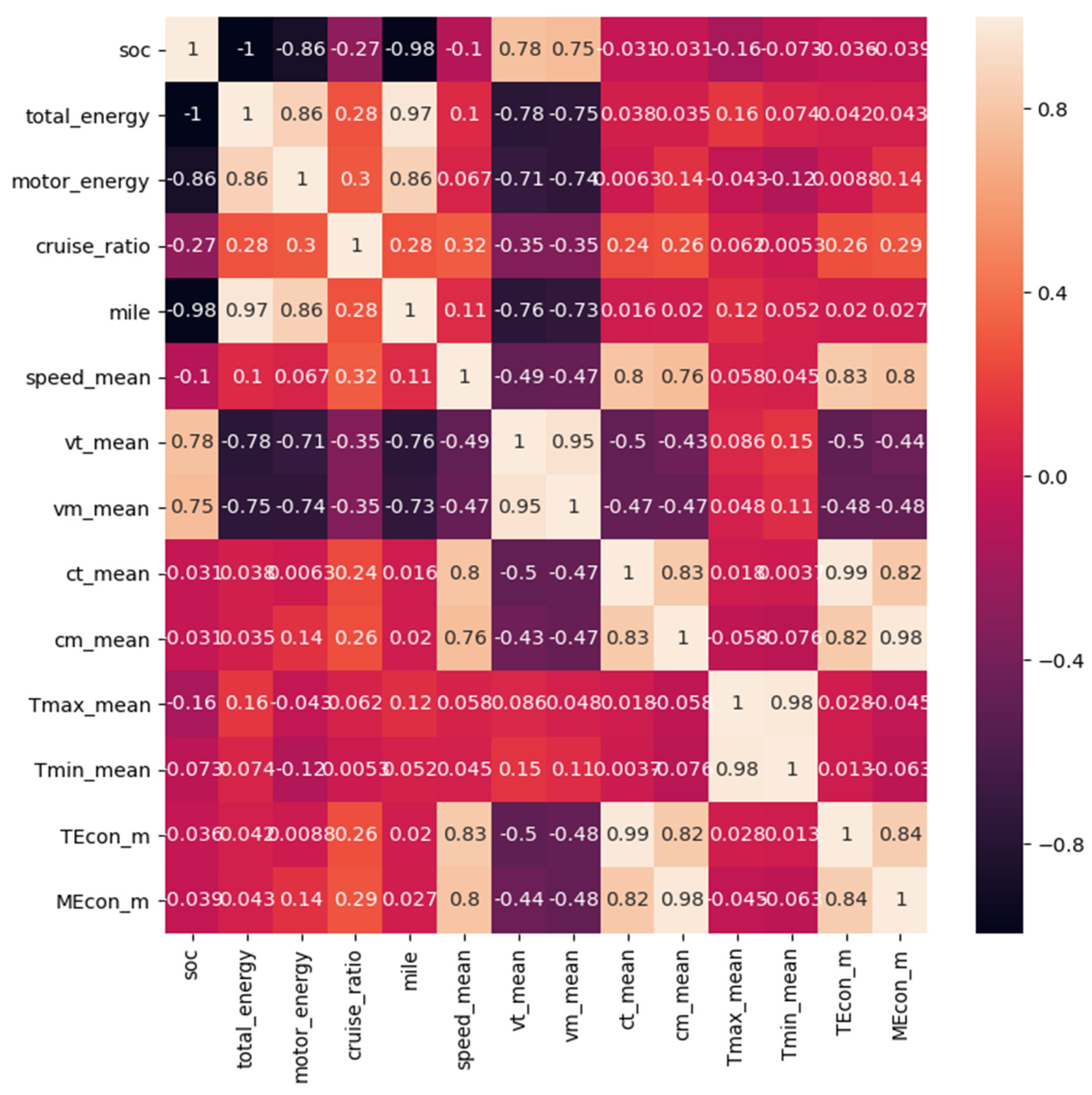
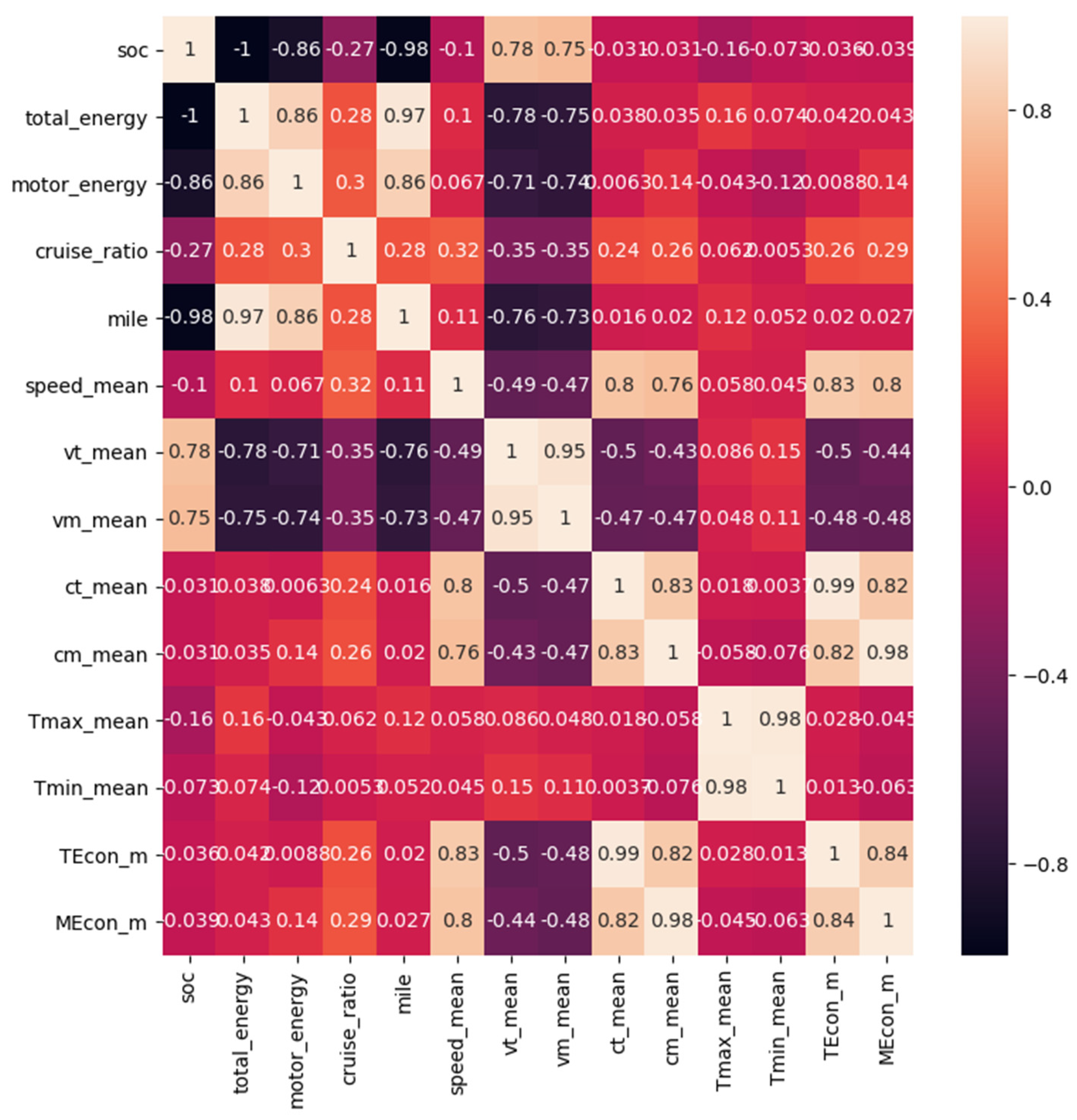
2.1. Analysis and Processing of Vehicle Driving Data
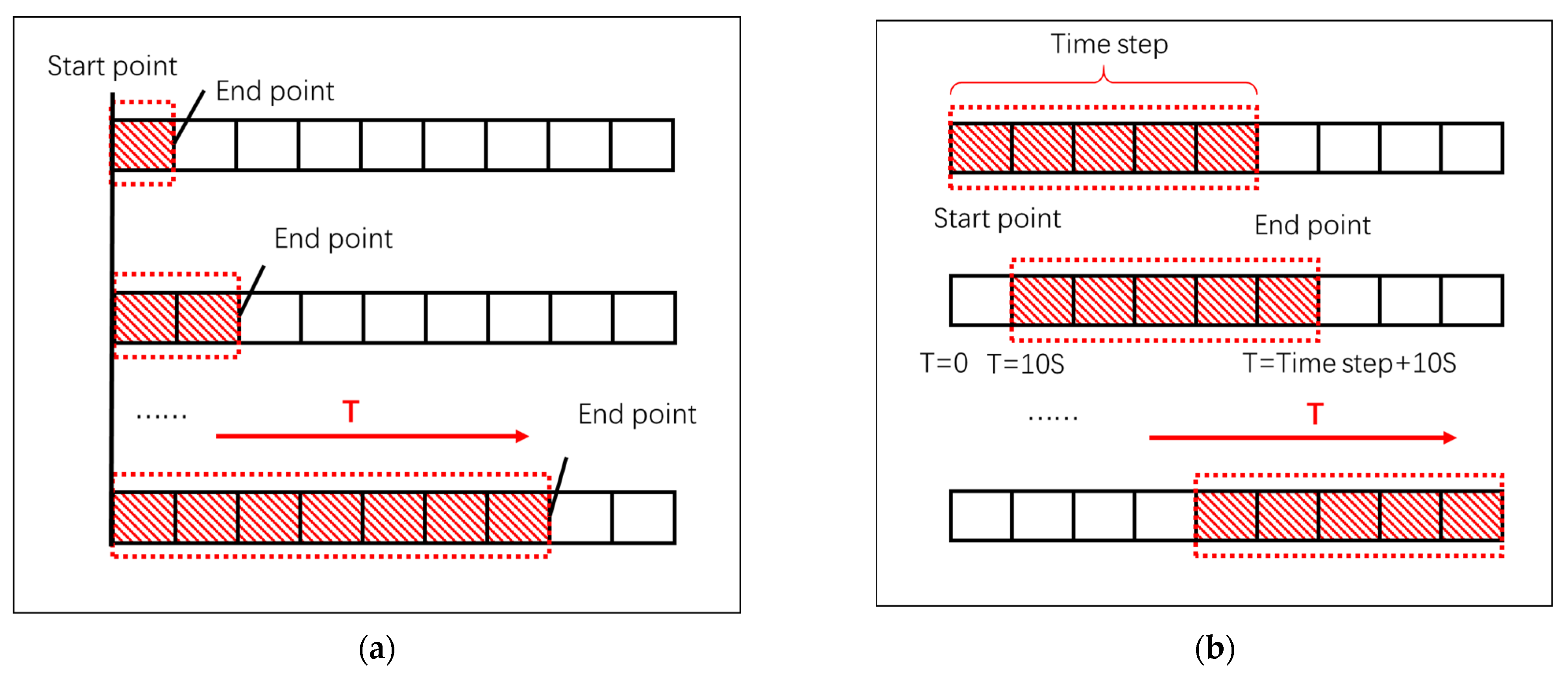
2.2. Sliding Window Method
- Total energy consumption index (TEcon):
- Motor energy consumption index (MEcon):
- Mileage driven (mile):
- Cruise ratio (Cr):
2.3. Machine Learning Algorithms and SHAP
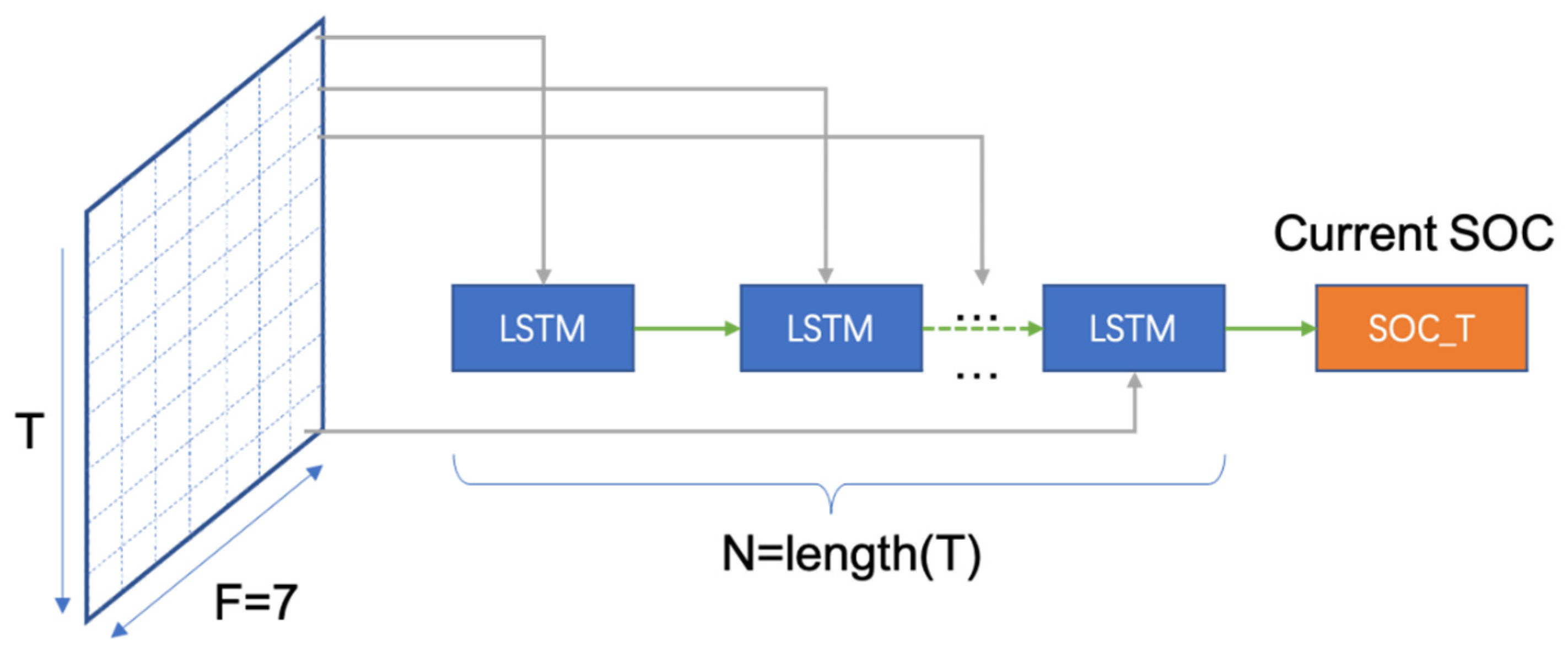
2.4. SOC Prediction with LSTM Model
3. Results
4. Conclusions and Discussion
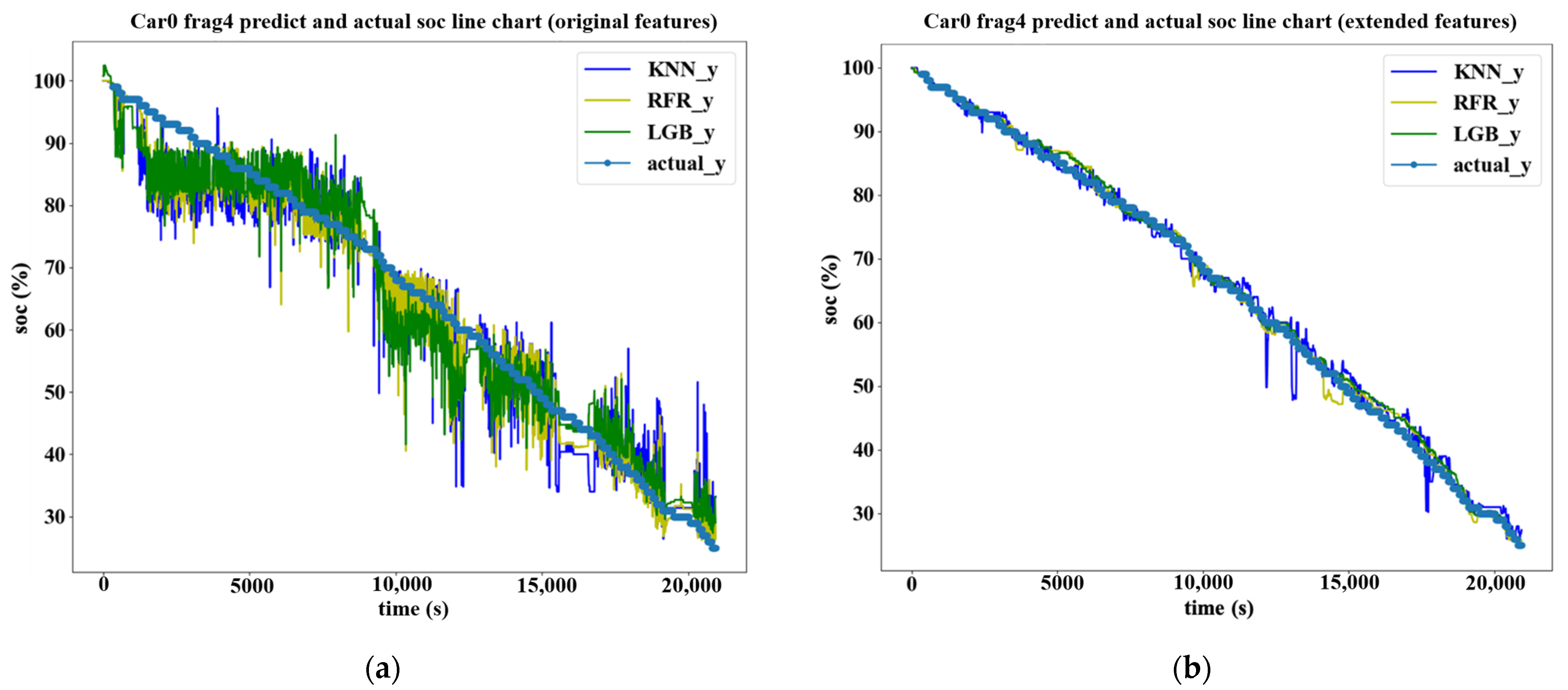
- Data preprocessing is crucial and necessary for machine learning. Data segregation and filtering will significantly improve the accuracy of models. The results from this investigation have shown that the extended features processed by the SW and SHAP methods can significantly reduce the prediction error and, hence, improve the accuracy.
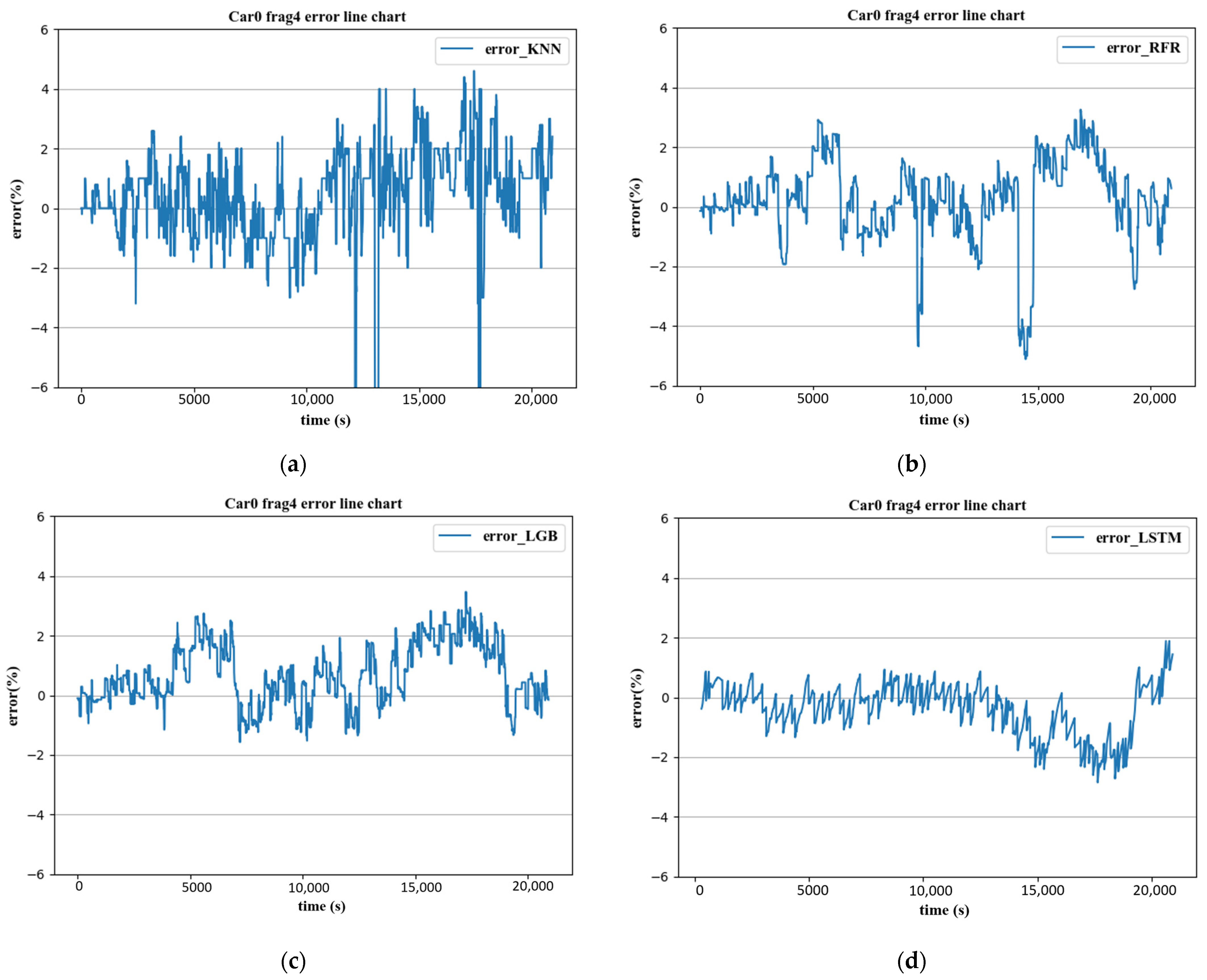
- LSTM has considerable advantages over other prediction models. The computed errors are within 2%, which is much lower than RFR, KNN, and LightGBM.
- The method proposed is shown to have good stability and adaptability, evidenced by the computed error on the prediction results when tested on the different vehicles and driving seasons.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sun, F.; Hu, X.; Zou, Y.; Li, S. Adaptive unscented Kalman filtering for state of charge estimation of a lithium-ion battery for electric vehicles. Energy 2011, 36, 3531–3540. [Google Scholar] [CrossRef]
- Ardeshiri, R.R.; Balagopal, B.; Alsabbagh, A.; Ma, C.; Chow, M.-Y. Machine Learning Approaches in Battery Management Systems: State of the Art: Remaining useful life and fault detection. In Proceedings of the 2020 2nd IEEE International Conference on Industrial Electronics for Sustainable Energy Systems (IESES), Cagliari, Italy, 20–22 April 2020; pp. 61–66. [Google Scholar]
- Rauh, N.; Franke, T.; Krems, J.F. Understanding the impact of electric vehicle driving experience on range anxiety. Hum. Factors 2015, 57, 177–187. [Google Scholar] [CrossRef]
- Zhu, Y.; Gao, T.; Fan, X.; Han, F.; Wang, C. Electrochemical techniques for intercalation electrode materials in rechargeable batteries. Acc. Chem. Res. 2017, 50, 1022–1031. [Google Scholar] [CrossRef]
- Wang, Y.; Tian, J.; Sun, Z.; Wang, L.; Xu, R.; Li, M.; Chen, Z. A comprehensive review of battery modeling and state estimation approaches for advanced battery management systems. Renew. Sustain. Energy Rev. 2020, 131, 110015. [Google Scholar] [CrossRef]
- Hannan, M.A.; Lipu, M.H.; Hussain, A.; Mohamed, A. A review of lithium-ion battery state of charge estimation and management system in electric vehicle applications: Challenges and recommendations. Renew. Sustain. Energy Rev. 2017, 78, 834–854. [Google Scholar] [CrossRef]
- Chandran, V.; Patil, C.K.; Karthick, A.; Ganeshaperumal, D.; Rahim, R.; Ghosh, A. State of charge estimation of lithium-ion battery for electric vehicles using machine learning algorithms. World Electr. Veh. J. 2021, 12, 38. [Google Scholar] [CrossRef]
- Liu, K.; Li, K.; Peng, Q.; Zhang, C. A brief review on key technologies in the battery management system of electric vehicles. Front. Mech. Eng. 2019, 14, 47–64. [Google Scholar] [CrossRef] [Green Version]
- Xiong, R.; Cao, J.; Yu, Q.; He, H.; Sun, F. Critical review on the battery state of charge estimation methods for electric vehicles. IEEE Access 2017, 6, 1832–1843. [Google Scholar] [CrossRef]
- Hu, J.; Hu, J.; Lin, H.; Li, X.; Jiang, C.; Qiu, X.; Li, W. State-of-charge estimation for battery management system using optimized support vector machine for regression. J. Power Sources 2014, 269, 682–693. [Google Scholar] [CrossRef]
- Jiao, M.; Wang, D.; Qiu, J. A GRU-RNN based momentum optimized algorithm for SOC estimation. J. Power Sources 2020, 459, 228051. [Google Scholar] [CrossRef]
- Hasan, A.J.; Yusuf, J.; Faruque, R.B. Performance comparison of machine learning methods with distinct features to estimate battery SOC. In Proceedings of the 2019 IEEE Green Energy and Smart Systems Conference (IGESSC), Long Beach, CA, USA, 4–5 November 2019; pp. 1–5. [Google Scholar]
- Hannan, M.A.; Lipu, M.H.; Hussain, A.; Ker, P.J.; Mahlia, T.; Mansor, M.; Ayob, A.; Saad, M.H.; Dong, Z. Toward enhanced State of charge estimation of Lithium-ion Batteries Using optimized Machine Learning techniques. Sci. Rep. 2020, 10, 1–15. [Google Scholar] [CrossRef] [Green Version]
- Hong, J.; Wang, Z.; Chen, W.; Wang, L.-Y.; Qu, C. Online joint-prediction of multi-forward-step battery SOC using LSTM neural networks and multiple linear regression for real-world electric vehicles. J. Energy Storage 2020, 30, 101459. [Google Scholar] [CrossRef]
- Song, X.; Yang, F.; Wang, D.; Tsui, K.-L. Combined CNN-LSTM network for state-of-charge estimation of lithium-ion batteries. IEEE Access 2019, 7, 88894–88902. [Google Scholar] [CrossRef]
- Houlian, W.; Gongbo, Z. State of charge prediction of supercapacitors via combination of Kalman filtering and backpropagation neural network. IET Electr. Power Appl. 2018, 12, 588–594. [Google Scholar] [CrossRef]
- Technology, Beijing Institute of Technology. Prediction of SOC in the Driving Process of Electric Vehicles. Available online: http://www.ncbdc.top (accessed on 15 November 2020).
- Benesty, J.; Chen, J.; Huang, Y.; Cohen, I. Pearson correlation coefficient. In Noise Reduction in Speech Processing; Springer: Berlin, Germany, 2009; pp. 1–4. [Google Scholar]
- Benesty, J.; Chen, J.; Huang, Y. On the importance of the Pearson correlation coefficient in noise reduction. IEEE Trans. Audio Speech Lang. Process. 2008, 16, 757–765. [Google Scholar] [CrossRef]
- Smrithy, G.; Balakrishnan, R.; Sivakumar, N. Anomaly detection using dynamic sliding window in wireless body area networks. In Data Science and Big Data Analytics; Springer: Berlin, Germany, 2019; pp. 99–108. [Google Scholar]
- Laguna, J.O.; Olaya, A.G.; Borrajo, D. A dynamic sliding window approach for activity recognition. In Proceedings of the International Conference on User Modeling, Adaptation, and Personalization, Girona, Spain, 11–15 July 2011; pp. 219–230. [Google Scholar]
- Hu, C.; Jain, G.; Zhang, P.; Schmidt, C.; Gomadam, P.; Gorka, T. Data-driven method based on particle swarm optimization and k-nearest neighbor regression for estimating capacity of lithiumion battery. Appl. Energy 2014, 129, 49–55. [Google Scholar] [CrossRef]
- Islam, M.K.; Hridi, P.; Hossain, M.S.; Narman, H.S. Network anomaly detection using lightgbm: A gradient boosting classifier. In Proceedings of the 2020 30th International Telecommunication Networks and Applications Conference (ITNAC), Melbourne, Australia, 25–27 November 2020; pp. 1–7. [Google Scholar]
- Sun, X.; Liu, M.; Sima, Z. A novel cryptocurrency price trend forecasting model based on LightGBM. Financ. Res. Lett. 2020, 32, 101084. [Google Scholar] [CrossRef]
- Lundberg, S.; Lee, S.-I. A unified approach to interpreting model predictions. arXiv 2017, arXiv:1705.07874. [Google Scholar]
- Tan, S.; Caruana, R.; Hooker, G.; Koch, P.; Gordo, A. Learning global additive explanations for neural nets using model distillation. arXiv 2018, arXiv:1801.08640. [Google Scholar]
- Yang, F.; Li, W.; Li, C.; Miao, Q. State-of-charge estimation of lithium-ion batteries based on gated recurrent neural network. Energy 2019, 175, 66–75. [Google Scholar] [CrossRef]
- Li, C.; Xiao, F.; Fan, Y. An approach to state of charge estimation of lithium-ion batteries based on recurrent neural networks with gated recurrent unit. Energies 2019, 12, 1592. [Google Scholar] [CrossRef] [Green Version]
- Zhao, R.; Kollmeyer, P.J.; Lorenz, R.D.; Jahns, T.M. A compact unified methodology via a recurrent neural network for accurate modeling of lithium-ion battery voltage and state-of-charge. In Proceedings of the 2017 IEEE Energy Conversion Congress and Exposition (ECCE), Cincinnati, OH, USA, 1–5 October 2017; pp. 5234–5241. [Google Scholar]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef]
- Graves, A. Long short-term memory. In Supervised Sequence Labelling with Recurrent Neural Networks; Springer: Berlin, Germany, 2012; pp. 37–45. [Google Scholar]
- Yang, F.; Song, X.; Xu, F.; Tsui, K.-L. State-of-charge estimation of lithium-ion batteries via long short-term memory network. IEEE Access 2019, 7, 53792–53799. [Google Scholar] [CrossRef]
- Zhao, Z.; Chen, W.; Wu, X.; Chen, P.C.; Liu, J. LSTM network: A deep learning approach for short-term traffic forecast. IET Intell. Transp. Syst. 2017, 11, 68–75. [Google Scholar] [CrossRef] [Green Version]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Sign | Unit | Notes |
|---|---|---|---|
| Time | t | s | Real-time data timestamp |
| Speed | speed | km/h | Real-time vehicle speed |
| Total voltage | vt | V | Total voltage |
| Total current | ct | A | Total current |
| Temp max | Tmax | °C | Maximum cell temperature |
| Temp min | Tmin | °C | Minimum cell temperature |
| Motor voltage | vm | V | Motor controller input voltage |
| Motor current | cm | A | Motor controller DC bus current |
| Mileage | Mile | km | Total mileage |
| SOC | SOC | % | State of charge |
| Name | Sign | Unit | Notes |
|---|---|---|---|
| Total energy | TEcon | kw | Total energy consumption |
| Motor energy | MEcon | kw | Motor energy consumption |
| Mileage driven | mile | km/h | Mileage in the Fixed-point SW |
| Cruise ratio | Cr | % | The proportion of driving segment |
| Speed mean | speedm | km/h | The mean of speed in Dynamic SW |
| Total voltage mean | vt_m | V | The mean of vt in Dynamic SW |
| Motor voltage mean | vm_n | V | The mean of vm in Dynamic SW |
| Total current mean | ct_m | A | The mean of ct in Dynamic SW |
| Motor current mean | cm_m | A | The mean of cm in Dynamic SW |
| Temp max mean | Tmax_m | °C | The mean of Tmax in Dynamic SW |
| Temp min mean | Tmin_m | °C | The mean of Tmin in Dynamic SW |
| Total energy mean | TEcon_m | kw | The mean of TEcon in Dynamic SW |
| Motor energy mean | MEcon_m | kw | The mean of MEcon in Dynamic SW |
| Algorithm | With Original Features | With Extended Features | ||||
|---|---|---|---|---|---|---|
| R2 | RMSE | MAE | R2 | RMSE | MAE | |
| KNN | 0.8127 | 9.0131 | 6.3559 | 0.9821 | 2.7796 | 2.0889 |
| RF | 0.8752 | 7.3579 | 5.2676 | 0.9923 | 1.8162 | 1.3087 |
| LightGBM | 0.8806 | 7.1984 | 5.5724 | 0.9941 | 1.5953 | 1.1640 |
| Vehicle | Test Set Frag Id | Month of Test Set | Total Number of Fragments |
|---|---|---|---|
| car0 | 4 | July | 6 |
| car1 | 8, 9 | January | 16 |
| car2 | 0 | January | 8 |
| car3 | 6 | April | 13 |
| car4 | 7, 10 | November/January | 17 |
| Model | RMSE | MAE | R2 Score (%) |
|---|---|---|---|
| KNN | 2.749 | 2.065 | 98.26 |
| RFR | 1.829 | 1.315 | 99.25 |
| LightGBM | 1.631 | 1.180 | 99.39 |
| Proposed LSTM | 1.245 | 0.757 | 99.63 |
| Segment | Month | Source | MSE | MAE | R2 Score (%) |
|---|---|---|---|---|---|
| car1 F8 | January | Homologous | 0.954 | 0.711 | 99.79 |
| car3 F6 | April | Homologous | 1.072 | 0.707 | 99.64 |
| car4 F7 | November | Homologous | 0.873 | 0.534 | 99.84 |
| car0 F4 | July | Heterogeneous | 1.232 | 0.963 | 99.68 |
| car2 F0 | January | Heterogeneous | 1.349 | 0.769 | 99.55 |
| Car3 F6 | April | Heterogeneous | 1.003 | 0.873 | 99.57 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gu, X.; See, K.; Wang, Y.; Zhao, L.; Pu, W. The Sliding Window and SHAP Theory—An Improved System with a Long Short-Term Memory Network Model for State of Charge Prediction in Electric Vehicle Application. Energies 2021, 14, 3692. https://doi.org/10.3390/en14123692
Gu X, See K, Wang Y, Zhao L, Pu W. The Sliding Window and SHAP Theory—An Improved System with a Long Short-Term Memory Network Model for State of Charge Prediction in Electric Vehicle Application. Energies. 2021; 14(12):3692. https://doi.org/10.3390/en14123692
Chicago/Turabian StyleGu, Xinyu, KW See, Yunpeng Wang, Liang Zhao, and Wenwen Pu. 2021. "The Sliding Window and SHAP Theory—An Improved System with a Long Short-Term Memory Network Model for State of Charge Prediction in Electric Vehicle Application" Energies 14, no. 12: 3692. https://doi.org/10.3390/en14123692
APA StyleGu, X., See, K., Wang, Y., Zhao, L., & Pu, W. (2021). The Sliding Window and SHAP Theory—An Improved System with a Long Short-Term Memory Network Model for State of Charge Prediction in Electric Vehicle Application. Energies, 14(12), 3692. https://doi.org/10.3390/en14123692